Изобретение относится к искусственной стопе с соединительным элементом части голени, части плюсны, шарнирно соединенной посредством верхнего и нижнего элементов связи с соединительным элементом таким образом, что угловое положение соединительного элемента управляет угловым положением части плюсны, причем один из элементов связи заходит в пяточную область стопы.
Искусственная стопа такого рода описана в предварительно не опубликованной немецкой патентной заявке DE 10 2004 031 562 А1, на которую делается ссылка. Благодаря соединению части плюсны с соединительным элементом части голени посредством обоих элементов связи впервые осуществляется принудительная связь между соединительным элементом и частью плюсны по угловому положению. Изменение углового положения соединительного элемента или части голени в направлении назад ведет к пропорциональному подъему части плюсны. Поэтому искусственная стопа может переводиться из положения без каблука (положения “босой ноги”) в положение с обувью на высоком каблуке, благодаря чему положение части голени, а тем самым и соединительного элемента относительно поверхности подошвы искусственной стопы изменяется в смысле изменения угла в направлении назад. В результате часть плюсны приподнимается настолько, что он снова устанавливается параллельно опорной поверхности (передней части подошвы обуви). Поэтому часть плюсны устойчиво располагается на опорной поверхности и воспринимает необходимую нагрузку для уверенной устойчивости даже на высоком каблуке. Поэтому нет больше необходимости в ранее предусматривавшемся мягком или упругом выполнении части плюсны.
Вышеописанная искусственная стопа, предпочтительно, содержит многошарнирное устройство, в частности, шарнирный четырехугольник, причем элементы связи между плюсной и средней частью стопы, в основном, могут располагаться параллельно друг другу. Отсюда отношение угловых перемещений соединительного элемента и части плюсны получается равным 1:1, что является идеальным для подгонки под высоту каблука. В случае вышеописанной искусственной стопы верхний элемент связи заходит в пяточную область и тем самым образует нечто вроде балансира, шарнирно установленного на соединительном элементе примерно по центру. Эта конструкция имеет то преимущество, что вращательный шарнир верхнего элемента связи установлен примерно в положении естественного голеностопного сустава. Однако имеется и недостаток, заключающийся в том, что перемещение верхнего элемента связи, выполненного в виде балансира, под нагрузкой изменяет длину искусственной стопы в области подошвы, так что, например, при качающейся нагрузке может произойти непроизвольная миграция стопы.
Поэтому задачей изобретения является реализация преимуществ искусственной стопы вышеупомянутого типа при устранении недостатков, связанных с изменением длины стопы в результате перемещения верхнего элемента связи.
Для решения задачи согласно изобретению искусственная стопа вышеупомянутого типа отличается тем, что нижний элемент связи заходит в пяточную область. В случае искусственной стопы согласно изобретению перемещение части плюсны не приводит к изменению длины стопы, так что недостаток, вызванный изменением длины стопы, устраняется. Поскольку при движении голеностопного сустава искусственной стопы согласно изобретению решающую роль играет шарнир нижнего элемента связи, преимущество согласно изобретению может способствовать тому, что шарнир нижнего элемента связи расположится несколько ниже физиологического голеностопного сустава, поскольку из косметических соображений существенно более высокая конструкция стопы является нежелательной. В отношении положения вращательного шарнира в этом случае за основу придется взять компромиссное решение.
Впрочем, искусственная стопа согласно изобретению обеспечивает автоматическую подгонку углового положения части плюсны под опорную поверхность подошвы искусственной стопы, определяемую опорными точками «подушечек» в точке соединения между частью плюсны и элементами связи, образующими среднюю часть стопы, с одной стороны, и «пяткой» на заднем конце пяточной области, с другой. В обуви на более высоком каблуке эта опорная поверхность располагается под углом к горизонтали. При этом поскольку голень для достижения равновесия, в основном, должна располагаться отвесно, между нижним элементом связи и соединительным элементом голени появляется угол, повернутый в направлении назад. Этот угол передается на часть плюсны и обеспечивает подъем части плюсны, так что последний располагается плоскопараллельно земле, т.е. передней части подошвы, и поэтому может воспринимать усилия, способствующие большей устойчивости.
Как в вышеописанной конструкции согласно DE 10 2004 031 562 А1, целесообразным может оказаться ограничение изменения длины одного из элементов связи. При ходьбе непосредственная передача углового перемещения лодыжки на часть плюсны является нежелательной. Предпочтительной является передача, осуществляемая за счет установки элементов связи под углом и преобразующая угловые перемещения лодыжки в перемещения части плюсны с нарушением пропорции в сторону ее увеличения. В этом случае для компенсации высоты каблука необходима подгонка одного из элементов связи по длине. Последняя может производиться статически, так что подгонка по длине осуществляется для подгонки под высоту каблука только при смене обуви. Однако возможна также динамическая подгонка по длине, когда один из элементов связи является растяжимым за счет упругости или, например, когда его длина может изменяться с помощью гидравлического цилиндра.
Таким образом, можно, например, уменьшить повышенную нагрузку на часть плюсны, возникающую при предварительном перемещении нагрузки. Если изменение длины, несмотря на действие нарастающей упругой силы противодействия, возможно, появляется прогрессивная нарастающая сила противодействия части плюсны, которая является желательной. При этом небольшое «качание» пациента при стоянии стабилизируется за счет упругого, прогрессивно нарастающего противодействия, что соответствует естественному ощущению стояния.
Изменение длины элемента связи может производиться также с помощью гидравлического цилиндра, причем, предпочтительно, такого гидравлического цилиндра, который мог бы переустанавливаться только в результате медленных изменений, а при кратковременных изменениях блокировался бы. Такой гидравлический цилиндр подробно описан в DE 10 2004 031 562 А1.
Для динамики ходьбы предпочтительно, чтобы относительное движение между пяточной областью и соединительным элементом амортизировалось с помощью амортизирующего устройства. При этом амортизирующее устройство должно выполнять демпфирующую функцию пружины, однако оно может быть также выполнено с таким расчетом, чтобы срабатывать под действием статических нагрузок, если гидравлический цилиндр предусмотрен с отверстием для обтекания. Таким образом, подгонка под различную высоту каблука может осуществляться так, чтобы соответствующее положение стояния не производило никакого действия и не должно было вызывать какой-либо силы противодействия.
Целесообразной может быть реализация шарнирного крепления элементов связи не на вращательных шарнирах, а с помощью упругого соединения. При этом упругое соединение может быть выполнено только с одного конца элемента связи, но может быть выполнено и с обоих концов.
В одной из особенно предпочтительных форм выполнения изобретения нижний элемент связи упруго прилегает к части плюсны и к соединительному элементу посредством соответствующего листового пружинящего элемента, причем оба листовых пружинящих элемента заводятся в пяточную область и там прилегают друг к другу плоскостями. При этом листовой пружинящий элемент, соединенный с соединительным элементом, имеет форму буквы С, в то время как листовой пружинящий элемент, соединенный с частью плюсны, имеет слегка волнистую форму.
Кроме того, искусственная стопа согласно изобретению пригодна для дополнительной динамической регулировки, при которой амортизирующие свойства элемента связи поддаются постоянной регулировке, например, путем использования гидравлического цилиндра с клапаном с электронной регулировкой. При этом управление может осуществляться в зависимости от измеренных состояний нагрузки и положения стопы.
Ниже настоящее изобретение поясняется на примерах осуществления, изображенных на чертежах:
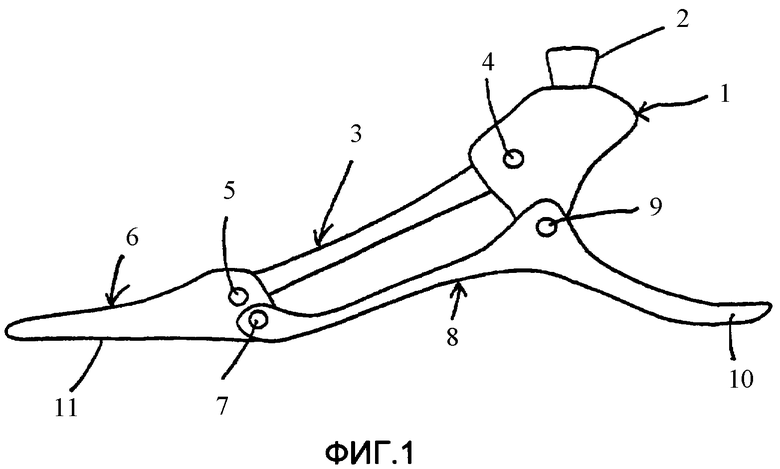
фиг.1 - вид сбоку первого примера осуществления искусственной стопы согласно изобретению;
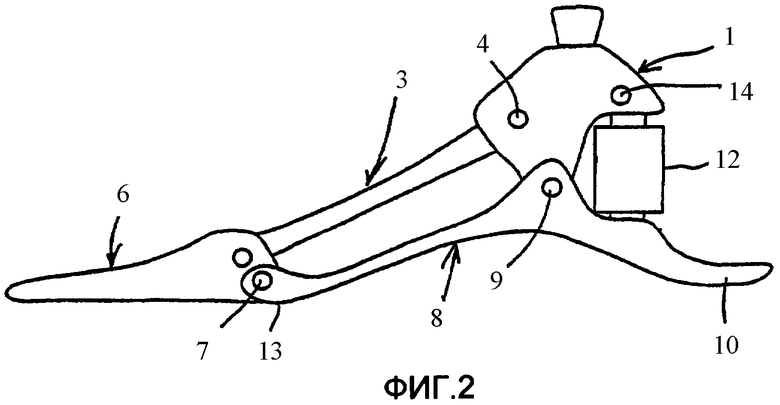
фиг.2 - вид сбоку модифицированной первой формы выполнения;
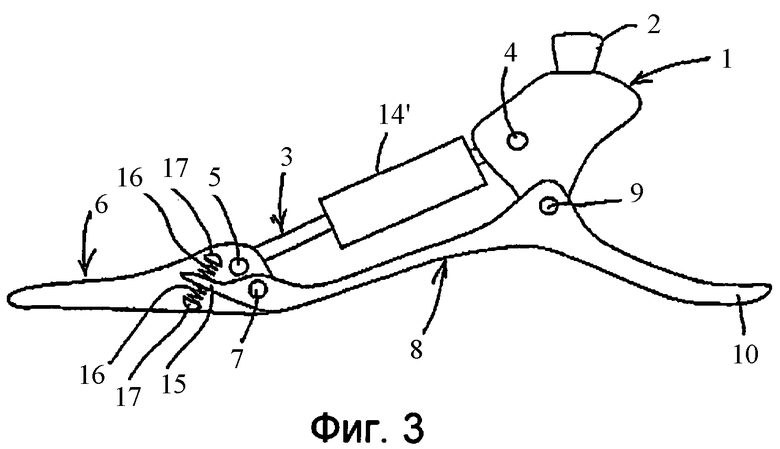
фиг.3 - вторая форма выполнения искусственной стопы согласно изобретению;
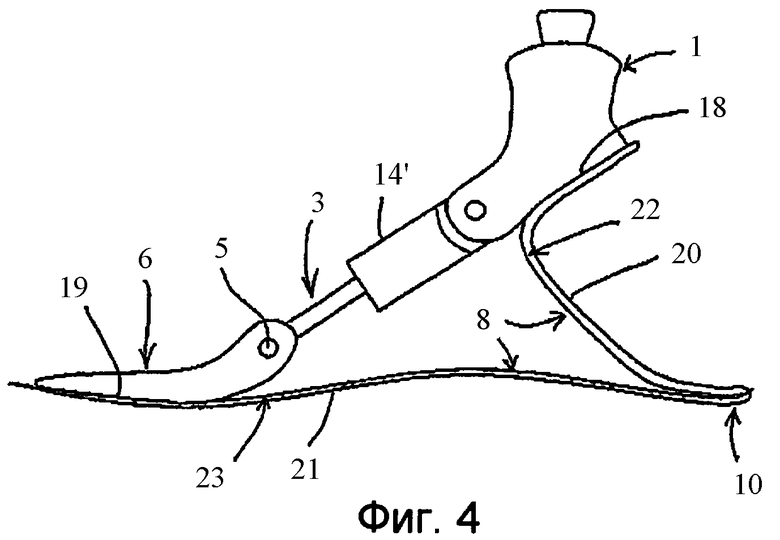
фиг.4 - третья форма выполнения искусственной стопы согласно изобретению.
Форма выполнения стопы согласно изобретению, изображенная на фиг.1, содержит соединительный элемент 1 с местом 2 прикрепления адаптера в виде перевернутого усеченного конуса на верхней стороне. Место 2 прикрепления адаптера обеспечивает регулируемую установку трубчатой части голени протеза голени.
С соединительным элементом 1 посредством вращательного шарнира 4 соединен верхний элемент 3 связи. Другой конец верхнего элемента связи посредством другого вращательного шарнира 5 соединен с частью 6 плюсны, имитирующей область пальцев ноги естественной стопы. На части 6 плюсны под вращательным шарниром 5 расположен дополнительный вращательный шарнир 7, с помощью которого нижний элемент 8 связи соединяется с частью 6 плюсны. Нижний элемент 8 связи посредством вращательного шарнира 9 шарнирно соединен с нижним концом соединительного элемента 1 и имеет выступ, являющийся продолжением нижнего элемента 8 связи за вращательным шарниром 9 в свободном конце 10 пятки с заходом в пяточную область стопы. Поэтому свободный конец 10 пятки несколько отогнут вниз. Очевидно, что нижний элемент 8 связи со своим свободным концом 10 пятки и обоими вращательными шарнирами 7, 9 образует балансир, который, например, при постановке стопы на пятку для выполнения шага испытывает нагрузку на свободном конце 10 пятки за счет силы реакции опоры, тем самым создает момент вращения для части 6 плюсны, разворачивающий часть 6 плюсны кверху. Вращательный шарнир 9 балансира соответствует голеностопному суставу.
Часть 6 плюсны образует нечто вроде треугольного клина, нижняя сторона которого 11 параллельна (не показана) опорной плоскости стопы в области части 6 плюсны.
В примере осуществления, изображенном на фиг.1, соединительный элемент 1, элементы 3, 8 связи и часть 6 плюсны выполнены неподвижными. Таким образом, нагрузка в области конца 10 пятки сразу же вызывает разворот части 6 плюсны в направлении вверх, соответствующий подъему пальцев ноги. Для смягчения этой противоестественной реакции в модифицированном примере осуществления согласно фиг.2 предусмотрен амортизатор 12, устанавливаемый между соединительным элементом 1 и концом 10 пятки нижнего элемента 8 связи. При реакции опоры, воздействующей на конец 10 пятки, амортизатор 12 обеспечивает, например, задержку, а в случае необходимости ограничение разворота заднего конца 10 пятки в направлении вверх, благодаря чему с соответствующей задержкой и ограничением производится разворот части 6 плюсны в направлении вверх.
Амортизатор 12, предпочтительно, предусматривается в виде гидравлического цилиндра с отверстием для обтекания, закрывающимся при слишком большой скорости потока. Благодаря этому становится возможным квазистатическое изменение угла между соединительным элементом 1 и задним концом 10 пятки, или нижним элементом 8 связи, если, например, искусственная стопа устанавливается в обуви на более высоком каблуке.
Таким образом, становится возможной относительная подгонка углового положения соединительного элемента 1, а тем самым части голени относительно нижнего элемента 8 связи с тем, чтобы в случае подъема нижнего элемента 8 связи из-за более высокого каблука обеспечить протезу голени отвесную направленность, подверженную воздействию упругих сил реакции.
Впрочем, угловое положение нижнего элемента 8 связи является результатом действия опорных поверхностей на заднем конце 10 пятки, с одной стороны, и на переднем конце 13 подушечек, снабженных вращательным шарниром 7, с другой.
Кроме того, следует упомянуть, что амортизатор 12 соединен с задним концом 10 пятки и соединительным элементом 1 также шарнирно. На фиг.2 соответствующий вращательный шарнир 14 показан в соединительном элементе 1.
В примере осуществления, изображенном на фиг.3, верхний элемент 3′ связи образован посредством гидравлического цилиндра 14' с возможностью перемещения в продольном направлении. Эта форма выполнения способствует подгонке искусственной стопы под обувь с каблуками различной высоты. Кроме того, нижний элемент 8 связи снабжен выступом 15, являющимся продолжением нижнего элемента 8 связи за вращательным шарниром 7 в свободном конце и действующим в обе стороны на соответствующие нажимные пружины 16, взаимодействующие со стационарными упорами 17. Разворот нижнего элемента 8 связи относительно части 6 плюсны упруго амортизируется нажимными пружинами 16 и ограничивается упорами 17 во избежание чрезмерного разворота части 6 плюсны.
В третьей форме выполнения стопы согласно изобретению, изображенной на фиг.4, соединительный элемент 1 и часть 6 плюсны снабжены опорными поверхностями 18, 19, к которым прилегают соответствующие участки листовых пружинящих элементов 20, 21, закрепленные там. Оба листовых пружинящих элемента 20, 21 совместно образуют нижний элемент 8 связи, выполненный упругим. Листовой пружинящий элемент 20, соединенный с соединительным элементом 1, имеет форму буквы С и одновременно представляет собой пружинящий элемент пятки, т.е. выполняет функцию, аналогичную амортизатору 12 на фиг.2. Листовой пружинящий элемент 21, соединенный с частью 6 плюсны, волнообразно простирается наподобие подошвы от части 6 плюсны до конца 10 пятки, на котором оба листовых пружинящих элемента 20, 21 прилегают друг другу плоскостями, соединяются друг с другом и вместе образуют свободный конец.
В результате формообразования листовых пружинящих элементов 20, 21 появляются центры 22, 23 вращательного момента. Центр 22 вращательного момента расположен вблизи соединительного элемента 1 и выполняет функцию голеностопного сустава, в то время как центр 23 вращательного момента расположен на листовом пружинящем элементе 21 в области подушечки искусственной стопы.
Очевидно, что в формах выполнения, изображенных на фиг.1-4, осуществляется принудительное управление углом разворота части 6 плюсны, в то время как действительная длина стопы остается неизменной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРТОПЕДИЧЕСКАЯ ЧАСТЬ СТОПЫ И СПОСОБ УПРАВЛЕНИЯ ИСКУССТВЕННОЙ СТОПОЙ | 2009 |
|
RU2473323C2 |
| ПАССИВНОЕ ОРТОПЕДИЧЕСКОЕ ВСПОМОГАТЕЛЬНОЕ СРЕДСТВО В ВИДЕ ПРОТЕЗА ИЛИ ОРТЕЗА СТОПЫ | 2009 |
|
RU2473322C2 |
| ИСКУССТВЕННАЯ СТОПА | 2005 |
|
RU2352297C2 |
| ИСКУССТВЕННАЯ СТОПА И СПОСОБ УПРАВЛЕНИЯ ЕЕ ДВИЖЕНИЕМ | 2007 |
|
RU2419398C2 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО И СПОРТИВНАЯ ОБУВЬ (ЕЕ ВАРИАНТЫ) | 1991 |
|
RU2046588C1 |
| СПОСОБ ЛЕЧЕНИЯ ПЛОСКОСТОПИЯ | 2021 |
|
RU2814760C2 |
| Конструкция здоровьесберегающей обуви на высоком и серхвысоком каблуке | 2019 |
|
RU2729645C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ И ЛЕЧЕНИЯ НАРУШЕНИЙ ФУНКЦИИ И ДЕФОРМАЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2222307C2 |
| ИСКУССТВЕННАЯ СТОПА | 2002 |
|
RU2209611C1 |
| ПРОТЕЗ СТОПЫ | 1999 |
|
RU2163792C1 |
Изобретение относится к медицинской технике, а именно к протезам стопы. Искусственная стопа с соединительным элементом части голени, частью плюсны, шарнирно соединенной посредством верхнего элемента и нижнего элемента связи с соединительным элементом таким образом, что угловое положение соединительного элемента управляет угловым положением части плюсны. Верхний элемент связи посредством вращательного шарнира соединен с соединительным элементом. Нижний элемент связи заходит в пяточную область. Изобретение устраняет миграцию стопы. 10 з.п. ф-лы, 4 ил.
1. Искусственная стопа с соединительным элементом (1) части голени, частью (6) плюсны, шарнирно соединенной посредством верхнего элемента (3) и нижнего элементов (8) связи с соединительным элементом (1) таким образом, что угловое положение соединительного элемента (1) управляет угловым положением части (6) плюсны, причем верхний элемент (3) связи посредством вращательного шарнира (4) соединен с соединительным элементом (1), а нижний элемент (8) связи заходит в пяточную область.
2. Искусственная стопа по п.1, отличающаяся тем, что один из элементов (3, 8) связи выполнен с изменяемой длиной.
3. Искусственная стопа по п.2, отличающаяся тем, что элемент (3, 8) с изменяемой длиной выполнен управляемым относительно нарастающей упругой силы противодействия.
4. Искусственная стопа по п.2, отличающаяся тем, что элемент (3) с изменяемой длиной содержит гидравлический цилиндр (14′).
5. Искусственная стопа по одному из пп.2-4, отличающаяся тем, что верхний элемент (3) связи выполнен с изменяемой длиной.
6. Искусственная стопа по п.1, отличающаяся тем, что между элементом (8) связи, заходящим в пяточную область, и соединительным элементом (1) установлено амортизирующее устройство (12).
7. Искусственная стопа по п.1, отличающаяся тем, что шарнирное соединение одного из элементов связи (8) выполнено из, по меньшей мере, одного упругого соединения.
8. Искусственная стопа по п.7, отличающаяся тем, что элемент (8) связи упруго прилегает как к части (6) плюсны, так и к соединительному элементу (1).
9. Искусственная стопа по п.8, отличающаяся тем, что нижний элемент (8) связи упрого прилегает к части (6) плюсны и к соединительному элементу (1) соответствующими листовыми пружинящими элементами (20, 21) и что листовые пружинящие элементы (20, 21) заходят в пяточную область и там прилегают друг к другу плоскостями.
10. Искусственная стопа по п.1, отличающаяся тем, что перемещение части (6) плюсны относительно нижнего элемента (8) связи ограничено промежуточно включенным упругим упорным устройством (16, 17).
11. Искусственная стопа по п.1, отличающаяся тем, что амортизирующие свойства элемента (3, 8) связи являются регулируемыми в зависимости от измеренных состояний нагрузки и/или положения стопы.
| DE 10010302 А1, 20.09.2001 | |||
| ПРОТЕЗ СТОПЫ | 2001 |
|
RU2217106C2 |
| Полимерная композиция | 1974 |
|
SU486030A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| ИСКУССТВЕННАЯ СТОПА | 0 |
|
SU311635A1 |
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, С ОДНОЙ ТРУБОЙ | 2011 |
|
RU2529968C1 |

