Изобретение относится к пассивному ортопедическому вспомогательному средству в виде протеза или ортеза стопы, содержащему первую часть, соединенную с возможностью вращения через вращательный шарнир со второй частью, сенсорное устройство для измерения параметров, позволяющих делать выводы об эксплуатационных потребностях вспомогательного средства в данный момент, процессорное устройство для определения эксплуатационных потребностей и формирования соответствующих управляющих сигналов, управляемое гидравлическое амортизирующее устройство, с помощью которого изменяется воздействующее на вращательное движение между первой и второй частями сопротивление движению, и преобразующее управляющие сигналы процессорного устройства управление амортизирующим устройством.
Такие ортопедические вспомогательные средства известны, в частности, в виде протезов стопы. Вращательный шарнир представляет собой, как правило, голеностопный сустав, который соединяет присоединительную часть для протеза голени со стопой.
У известного из US 2005/0197717 А1 протез ноги стопы содержит упругую подошвенную пружину, проходящую по всей длине стопы. Вызванная упругостью подошвенной пружины амортизация на фазе опоры цикла ходьбы дополняется при этом активным регулированием угла стопы относительно присоединительной части для голени. Это позволяет реализовать адаптацию к наклонному основанию или к изменившейся высоте каблука носимой обуви, причем для изменения высоты каблука предусмотрен соответствующий ручной ввод в управляющее устройство. Используемый актуатор представляет собой преимущественно двигатель двойного действия, в частности в виде двухпружинного электродвигателя. Использование актуатора двойного действия приводит к значительному расходу энергии для функционирования протеза, так что приходится либо использовать аккумулятор большой емкости, либо часто подзаряжать его.
Пассивный протез ноги описанного выше рода известен из US 6443993 В1 и US 2002/0138153 А1. Между стопой и присоединительной частью для голени предусмотрено по одному антериорному и постериорному амортизирующему цилиндру, которые функционируют в тандеме и соединены между собой общей соединительной линией. При нагрузке пятки постериорный цилиндр сжимается, так что гидравлическая жидкость поступает по соединительной линии в антериорный цилиндр. Скорость течения гидравлической жидкости по соединительной линии и, тем самым, амортизация соответствующего компрессионного движения на пятке регулируются за счет того, что в качестве гидравлической жидкости используется магнитно-реологическая жидкость, а с помощью катушки создается соответствующее магнитное поле, которое изменяет вязкость магнитно-реологической жидкости. В качестве датчиков используются датчик абсолютного наклона и датчик контакта с землей. При этом предусмотрено, что амортизация на фазе опоры цикла ходьбы повышается, например, при зарегистрированном посредством датчика наклона отклонении от вертикали, в частности переключается с первого уровня на второй. За счет этого возможна определенная адаптация протеза к наклонам основания и каблукам разной высоты.
Возникающая в уровне техники проблема состоит в том, что управление пассивным протезом или отрезом стопы обеспечивает отдельные адаптации, однако по сравнению с поведением естественной, здоровой стопы еще обладает значительными недостатками.
Поэтому в основе изобретения лежит задача обеспечения лучшей адаптации к поведению естественной стопы за счет пассивного ортопедического средства в виде протеза или отреза стопы.
Для решения этой задачи согласно изобретению пассивное ортопедическое средство в виде протеза или отреза стопы, содержащее первую часть, соединенную с возможностью вращения через вращательный шарнир со второй частью, сенсорное устройство для измерения параметров, позволяющих делать выводы об эксплуатационных потребностях вспомогательного средства в данный момент, связанное с управляющим устройством управление для определения эксплуатационных потребностей и формирования соответствующих управляющих сигналов, управляемое гидравлическое амортизирующее устройство, с помощью которого можно изменять воздействующее на вращательное движение между первой и второй частями сопротивление движению, и преобразующее управляющие сигналы процессорного устройства для управления амортизирующим устройством, дополнительно характеризуется тем, что демпфирующее устройство представляет собой гидравлический цилиндр двойного действия с двумя отделенными друг от друга поршнем гидравлическими камерами, гидравлические камеры сообщены двумя обеспечивающими течение гидравлической жидкости только в противоположных направлениях соединительными линиями, гидродинамические сопротивления которых устанавливаются посредством управления по отдельности с помощью собственного исполнительного органа, процессорное устройство рассчитано на определение актуального положения нулевой точки по измеренным параметрам сенсорного устройства, а формирование управляющих сигналов гидродинамических сопротивлений происходит, по меньшей мере, в одной соединительной линии, исходя из положения нулевой точки.
Таким образом, предложенный протез или ортез стопы содержит гидравлический цилиндр двойного действия, изменяющиеся синхронно по отношению друг к другу гидравлические камеры которого сообщены между собой двумя соединительными линиями, причем обе соединительные линии снабжены собственными исполнительными органами для регулирования их гидродинамического сопротивления, причем гидродинамическое сопротивление, по меньшей мере, в одной соединительной линии может быть установлено большим с возможностью фиксации вращательного шарнира в любом положении, а положение нулевой точки определяется в зависимости от актуальной высоты каблука используемой с вспомогательным средством обуви.
При этом исполнительными органами могут быть, в частности, управляемые клапаны, проходное сечение которых изменяется преимущественно бесступенчато. Это устройство дает возможность быстро и точно реализовать во время цикла ходьбы разные гидродинамические сопротивления для потока гидравлической жидкости в одном и другом направлениях. Кроме того, собственные исполнительные органы можно использовать для того, чтобы обеспечить непрерывный переход от движения стопы в одном и другом направлениях. Так, например, для управления голеностопным суставом можно реализовать контролируемый переход от плантарной флексии к дорсальной флексии при переносе нагрузки с пятки на носок, а с другой стороны, сохранить на некоторое время дорсальную флексию при разгрузке носка при переходе с фазы опоры на фазу переноса, чтобы сохранить подъем носка в начале фазы вплоть до переноса ноги за пределы среднего положения, как это происходит с естественной, здоровой стопой во избежание удара кончиков пальцев о землю при переносе ноги.
Согласно изобретению сенсорное и процессорное устройства должны быть рассчитаны так, чтобы можно было каждый раз определять актуальное положение нулевой точки. Подходящее для этого процессорное устройство состоит, например, из датчика момента лодыжки и датчика угла наклона или датчика абсолютного угла, если вращательный шарнир выполняет функцию голеностопного сустава. В дополнение к этому может быть предусмотрен преимущественно датчик угла лодыжки. Определение актуального упора в дорсальную сторону возможно при этом за счет определения абсолютного угла при прохождении момента лодыжки через нуль на фазе опоры цикла ходьбы. За счет этого без временнóй задержки можно учитывать актуальный наклон основания или соответствующую высоту каблука во время каждого цикла ходьбы. Поскольку при этом влияние высоты каблука и наклона основания содержатся в измеренном сигнале равным образом, целесообразно определять постоянное влияние высоты каблука за счет соответствующей обработки сигналов на фазе опоры цикла ходьбы или при стоянии. В качестве альтернативы этому высоту каблука можно вводить в устройство обработки также вручную.
В одном предпочтительном варианте осуществления изобретения гидродинамические сопротивления в обеих соединительных линиях могут быть установлены такими большими, чтобы вращательный шарнир фиксировался в одном положении. Для фиксации вращательного шарнира могут поэтому использоваться исполнительные органы, так что не требуется никакого особого фиксирующего устройства, например чтобы при стоянии носителя ортопедического вспомогательного средства обеспечить стабильную поддержку посредством протеза или ортеза. При этом фиксированное положение может соответствовать полученному положению нулевой точки.
В одном особенно предпочтительном варианте осуществления изобретения части вспомогательного средства выполнены, в основном, жесткими. Управление, по меньшей мере, одной преобладающей частью процесса движения в пределах цикла движения происходит без влияния упругости материала за счет управления гидродинамическими сопротивлениями. Во всяком случае, может быть целесообразным использовать определенную упругость материала при ударе пяткой об основание при ходьбе.
Следовательно, с помощью предложенного ортопедического вспомогательного средства определяется положение нулевой точки вращательного движения, начиная с которого при циклическом процессе движения определяются сопротивления движению в первом и втором направлениях движения вращательного шарнира, в частности голеностопного сустава. Для определенной эксплуатационной потребности, например при стоянии, за счет установления высоких сопротивлений движению в обоих направлениях движения вращательный шарнир фиксируется преимущественно в нулевой точке. При этом циклом движения является преимущественно цикл ходьбы.
В другом предпочтительном варианте осуществления изобретения присоединенной к вращательному шарниру частью является стопа, разделенная на главную и переднюю части, причем передняя часть соединена с главной частью посредством шарнира. При этом гидравлический цилиндр может быть сочленен с передней частью, чтобы регулировать главную часть в ее угловом положении косвенно, а именно через переднюю часть.
Другим объектом изобретения является способ управления пассивным ортопедическим вспомогательным средством в виде протеза или ортеза стопы, содержащим первую часть, соединенную с возможностью вращения через вращательный шарнир со второй частью, и амортизирующее устройство в виде гидравлического цилиндра двойного действия с двумя отделенными друг от друга поршнем гидравлическими камерами, причем гидравлические камеры сообщены двумя обеспечивающими течение гидравлической жидкости только в противоположных направлениях соединительными линиями, гидродинамические сопротивления которых устанавливают посредством устройства управления по отдельности с помощью собственного исполнительного органа, причем определяют положение нулевой точки вращательного движения, начиная с которого при циклическом процессе движения определяют сопротивление движению, по меньшей мере, в одном направлении движения, а вспомогательное средство фиксируют в нулевой точке для определенной эксплуатационной потребности за счет установления высоких сопротивлений движению в обоих направлениях движения.
Кроме того, способ может быть применим к ортопедическому вспомогательному средству для нижней конечности, у которой цикл ходьбы используют в качестве управляемого цикла движения.
Изобретение более подробно поясняется с помощью примера, изображенного на чертеже, на котором представляют:
- фиг.1: схематично первый вариант выполнения протеза стопы;
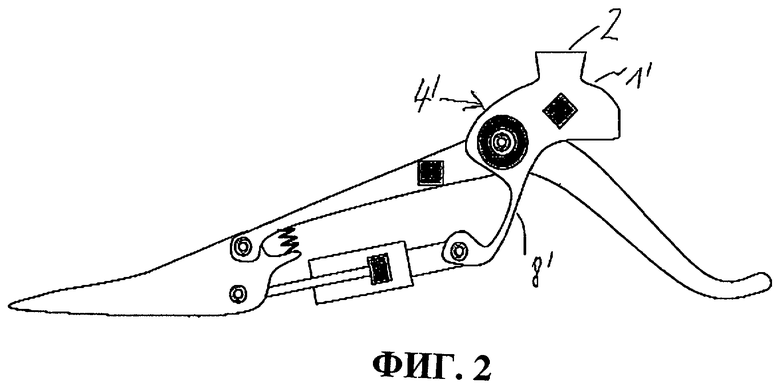
- фиг.2: схематично второй вариант выполнения протеза стопы;
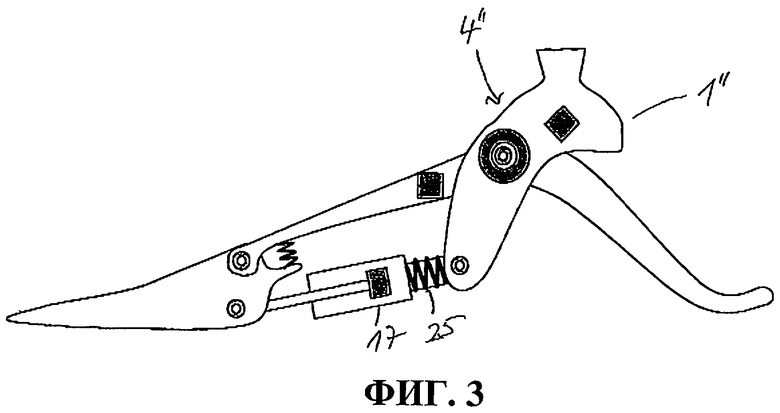
- фиг.3: схематично третий вариант выполнения протеза стопы;
- фиг.4: вид сверху на конструктивно более подробный вариант протеза ступы;
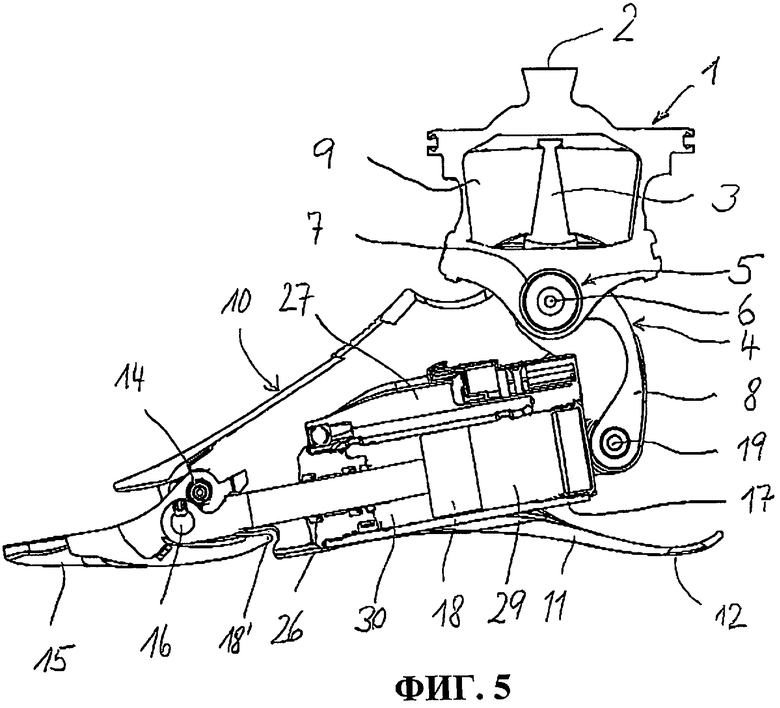
- фиг.5: сечение протеза стопы из фиг.4 параллельно сагиттальной плоскости.
В изображенном на фиг.1 варианте крепежная деталь 1 с регулировочным выступом 4 выполнена в форме перевернутой усеченной пирамиды с четырьмя наклонными поверхностями. Крепежная деталь 1 образует открытую вниз чашку, в которую входит направленное вверх ребро двуплечего рычага 4. Последний установлен с возможностью вращения вокруг вращательного шарнира 5, ось 6 вращения которого является одновременно осью голеностопного сустава искусственной стопы. Вращательный шарнир 5 снабжен датчиком 7 угла. Двуплечий рычаг 4 имеет жесткий, направленный вниз выступ 8.
В открытой вниз чашке крепежной детали 1 образованный с ребром 3 промежуток заполнен относительно твердым эластичным материалом 9, так что движение крепежной детали 1 передается на ребро 3 лишь с небольшой амортизацией. Следовательно, выступ 8 повторяет движение крепежной детали 1, однако с небольшой амортизацией из-за эластичного материала 9.
Образующий голеностопный сустав вращательный шарнир 5 несет главную часть 10 стопы, которая также в виде двуплечего рычага проходит задним плечом 11 в пяточную область стопы, где проходящее наискось назад и вниз заднее плечо 11 рычага снабжено приблизительно горизонтально скругленным концом 12.
Главная часть 10 имеет плечо 13 рычага, которое проходит приблизительно прямо вперед от голеностопного сустава 5 и немного наискось вниз, так что главная часть 10 выполнена выпуклой к голеностопному суставу 5 и наклонена от него назад в пяточную область и вперед в область плюсны, причем наклон в пяточную область более крутой, чем область плюсны.
Переднее плечо 13 рычага главной части 10 заканчивается в начале области плюсны и несет там вращательный шарнир 14, которым имитирующая область пальцев передняя часть 15 сочленена с возможностью вращения с передним плечом 13 рычага главной части 10. Вращательный шарнир 14 имеет ось вращения, проходящую параллельно оси 6 вращения голеностопного сустава 5 в горизонтальном направлении. Поскольку передняя часть 15 имитирует область пальцев естественной стопы, она выполнена вперед треугольной и заканчивается острием. Под вращательным шарниром 14 на передней части 15 находится дополнительный вращательный шарнир 16, которым с передней частью 15 сочленен шток поршня 18 гидроцилиндра 17. Последний сочленен вращательным шарниром 19 с возможностью вращения со свободным концом направленного вниз выступа 8 двуплечего рычага 4, так что вращательный шарнир 19 расположен под голеностопным суставом 5 с небольшим смещением от него вперед (в направлении передней части 15).
Голеностопный сустав 5 содержит датчик 7 угла для измерения угла лодыжки, т.е. угла между ребром 3, совпадающим с голенью, и передним плечом 13 рычага главной части 10.
Переднее плечо 13 рычага главной части 10 несет далее датчик 20 наклона, который определяет наклон относительно силы земного притяжения (относительно вертикали). Такие датчики 20 угла, определяющие абсолютный угол наклона относительно земного ускорения, известны в виде сенсорных устройств ускорения с гироскопом и без него.
Двуплечий рычаг 4 содержит совпадающий с регулировочным выступом 2, т.е. с (искусственной) голенью пациента, датчик 21 момента лодыжки, который измеряет действующий в этом месте крутящий момент.
Задний конец передней части 15 снабжен опорным выступом 22, который служит для удержания нагружаемой на растяжение и сжатие пружины 23, опирающейся другим своим концом на переднее плечо 13 рычага главной части 10. Пружина 23 вызывает возврат передней части 15 после дорсальной флексии, причем скорость возврата определяется гидроцилиндром 17.
Гидроцилиндр 17 выполнен в виде пассивного актуатора, в котором клапаны (не показаны) управляют вызванным поршнем 18 течением гидравлической жидкости, причем сами клапаны выполнены не только с возможностью включения и выключения, но и с возможностью управления расходом.
Изображенный на фиг.2 вариант, в основном, соответствует варианту на фиг.1. Отличие состоит в том, что крепежная деталь 1′ выполнена за одно целое с регулировочным выступом 2, вследствие чего отсутствует упругость за счет эластичного материала 9. Вместо этого направленный вниз выступ 8′ двуплечего рычага 4′ выполнен более тонким, так что несущий вращательный шарнир 19 свободный конец выступа выполнен упругопружинящим по отношению к остальному материалу двуплечего рычага 4′.
Разумеется, искусственная стопа во втором варианте также имеет косметическое покрытие 24, как и в первом варианте. Однако это косметическое покрытие 24 во втором и третьем вариантах не показано.
В третьем варианте искусственной стопы на фиг.3 двуплечий рычаг 4′′ выполнен также за одно целое с регулировочным выступом 2. Направленный вниз выступ 8 двуплечего рычага 4′′ выполнен жестким, как в первом варианте. Вместо этого гидроцилиндр 17 посредством спиральной пружины 25 упруго соединен с направленным вниз выступом 8 двуплечего рычага 4′′. За счет этого последовательно с действием гидроцилиндра 17 возникает упругость, которая в варианте на фиг.1 реализована эластичным материалом 9, а в варианте на фиг.2 - пружинящим выступом 8′′. Все остальные части третьего варианта соответствуют частям первого варианта.
Изображенный на фиг.4 и 5 вариант позволяет видеть крепежную деталь 1 с регулировочным выступом 2 в форме пирамиды. В крепежной детали 1 находится эластичный материал 9, который взаимодействует с амортизирующим эффектом с направленным вверх ребром 3 двуплечего рычага 4. Направленный вниз выступ 8 двуплечего рычага 4 расположен в этом варианте в направлении ходьбы за голеностопным суставом 5 и сочленен там вращательным шарниром 19 с гидроцилиндром 17. В гидроцилиндре 17 с возможностью продольного перемещения установлен поршень 18, выходящий наружу через расположенную в гидроцилиндре 17 опору 26 и соединенный с дополнительным вращательным шарниром 16 передней части 15. На голеностопном суставе 5 установлена главная часть 10, которая выполнена здесь в виде жесткого корпуса и содержит направленный назад упругий рычаг 11 в качестве пяточного рычага. Таким образом, главная часть 10 вместе с пяточным рычагом 11 установлена с возможностью поворота вокруг голеностопного сустава 5 относительно крепежной детали 1 и двуплечего рычага 4. Движением поворота между крепежной деталью 1 и главной частью 10 управляют и амортизируют его двуплечий рычаг 4 и гидроцилиндр 17. Сочленение штока 18′ поршня 18 с передней частью 15 вызывает при этом только дополнительное управление образующей пальцевую пластину передней частью 15, которое, однако, лишь незначительно модифицирует управление главной частью 10, поскольку вращательный шарнир 16 расположен в непосредственной близости от вращательного шарнира 14 между передней 15 и задней 10 частями. Гидроцилиндр 17 снабжен двумя управляющими клапанами 27, 28, расположенными на его верхней стороне. Клапаны 27, 28 связаны с камерами 29, 30 гидроцилиндра 17 с обеих сторон от поршня 18, причем обратные клапаны (не показаны) заботятся о том, чтобы через клапан 27 могло происходить течение гидравлической жидкости только из задней камеры 29 в переднюю камеру 30, в результате чего поршень 18 входит в гидроцилиндр 17, что соответствует плантарной флексии главной части 10 относительно крепежной детали 1. Управляющий клапан 28 обеспечивает вместе с обратными клапанами течение гидравлической жидкости только из передней камеры 30 в заднюю камеру 29, в результате поршень 18 выходит из гидроцилиндра 17, т.е. происходит увеличение расстояния между вращательными шарнирами 19, 16. Это соответствует дорсальной флексии между крепежной деталью 1 и главной частью 10. В то же время перемещение вращательного шарнира 16 относительно вращательного шарнира 14 вперед вызывает подъем передней части 15.
Искусственная стопа функционирует в описанных вариантах одинаково. Сенсорное устройство для измерения угла лодыжки, момента лодыжки и абсолютного угла наклона позволяет определить и дифференцировать релевантные функциональные состояния искусственной стопы, причем обрабатывается сигнал датчика угла лодыжки для определения угла лодыжки (между крепежной деталью 1, 1′, 1′′ и главной частью 10), с одной стороны, и соответствующая скорость угла лодыжки, с другой стороны.
Так, например, распознать, находится ли искусственная стопа в процессе ходьбы на фазе шага или опоры, можно за счет определения скорости угла лодыжки при прохождении через нуль момента лодыжки. Если скорость угла лодыжки при прохождении через нуль момента лодыжки лежит ниже порогового значения, это распознается как «стояние», и актуатор в виде гидроцилиндра 17 посредством клапанов устанавливается на высокое сопротивление, за счет которого может быть образован дорсальный упор.
Распознавание крутого наклона или высоты каблука определяется посредством датчика 20 наклона в области плюсны главной части 10 при прохождении через нуль момента лодыжки.
При распознавании ходьбы в плоскости клапан, относящийся к плантарной флексии стопы, остается в полуоткрытом положении, тогда как клапан, определяющий дорсальную флексию, закрывается с увеличением угла лодыжки, образуя дорсальный упор.
При распознавании ходьбы в гору допускается увеличенная дорсальная флексия передней части 15.
При распознавании во время ходьбы удара пяткой после фазы переноса и в начале фазы опоры, в частности, за счет отрицательного момента лодыжки управление клапаном для плантарной флексии происходит так, что с увеличением угла лодыжки в направлении плантарной флексии он закрывается, образуя, тем самым, упор для плантарной флексии.
При распознавании отталкивания пальцами в конце фазы опоры (уменьшающийся момент лодыжки при увеличенном угле лодыжки) клапан для дорсальной флексии после паузы полностью открывается, чтобы за счет упругого момента вызвать подъем передней части (подъем пальцев) на фазе маха.
На этих примерах видно, что можно осуществить важное управление искусственной стопой при стоянии и ходьбе также в зависимости от наклона земли или высоты каблука, причем уже достаточно управления сопротивлением движению посредством гидроцилиндра.
В одном примере для распознавания состояний движения протеза стопы и вытекающего из этого управления реализованы следующие функции.
Различение между стоянием и ходьбой
Различение между стоянием и ходьбой осуществляется по следующим критериям:
1. Распознавание фазы маха
Фаза маха распознается за счет того, что момент лодыжки близок к нулю, поскольку ступа на фазе маха не нагружена.
Абсолютный угол части 10 стопы превышает пороговое значение, которое можно индивидуально определить для стояния. Кроме того, скорость абсолютного угла превышает определенное пороговое значение.
2. Распознавание удара пяткой в состоянии маха вперед
Распознается отрицательный момент лодыжки (плантарная флексия).
Сигнал абсолютного угла соответствует стопе в состоянии маха вперед по сравнению с индивидуально определенным для стояния пороговым значением.
Опционально плантарная флексия при ударе пяткой может указываться за счет скорости угла лодыжки.
3. Возврат к стоянию
После распознавания удара пяткой абсолютный угол главной части 10 остается в пределах индивидуально определенного для стояния порогового значения. В качестве альтернативы или дополнительно активное реверсирование направления движения на средней фазе опоры с дорсальной стороны в плантарную сторону может быть распознано как критерий стояния.
При обнаружении стояния управляющие клапаны 27, 28 настраиваются так, что для стояния возникают упоры в вентральную и дорсальную стороны для узкого угла (положение нулевой точки). Для цикла ходьбы упор смещается в дорсальную сторону, и амортизирующие свойства для плантарной и дорсальной флексий устанавливаются в зависимости от длины шага.
Различение между плоскостью и пандусом
Измеренный абсолютный угол в начале средней фазы опоры цикла ходьбы, т.е. после постановки всей стопы на основание, больше или меньше, чем определенный для ходьбы в плоскости диапазон значений абсолютного угла.
В соответствии с установленным наклоном пандуса дорсальный упор изменяется, и амортизирующие свойства при плантарной и дорсальной флексиях устанавливаются в зависимости от абсолютного угла и прогнозируемой длины шага.
Распознавание ходьбы назад
Распознавание ходьбы назад состоит из распознавания фазы маха назад и распознавания постановки передней части стопы в отведенном назад состоянии.
1. Распознавание фазы маха назад
При измеренном моменте лодыжки, близком к нулю, сигнал абсолютного угла соответствует отведенной назад по сравнению со стоянием стопе (ретроверсия), а скорость абсолютного угла превышает определенное пороговое значение.
2. Распознавание постановки плюсны в отведенном назад состоянии
Измеряется больший положительный момент лодыжки.
В зависимости от измеренных значений упор смещается в дорсальную сторону, а амортизирующие свойства при плантарной и дорсальной флексиях устанавливаются в зависимости от абсолютного угла при постановке плюсны.
Адаптация к каблукам разной высоты
Преимущественно высота каблука определяется за счет считывания сигнала абсолютного угла во время подачи вручную сигнала триггера. Пропорционально абсолютному углу устанавливается нулевая точка для управляющих клапанов 27, 28.
В качестве альтернативы этому можно определить высоту каблука в случае искусственной стопы с шарнирно присоединенной передней частью 15 за счет измерения угла передней части 15 относительно главной части 10. В этом заключается дополнительная опция в рамках настоящего изобретения.
Стояние на наклонном основании
Измеряется абсолютный угол при реверсировании направления движения с плантарной стороны в дорсальную сторону, если момент лодыжки проходит через нуль. В соответствии с этим дорсальный упор для управления гидроцилиндром 17 с управляющими клапанами 27, 28 смещается в зависимости от наклона основания.
Распознавание ходьбы по лестнице
Если датчик 20 абсолютного угла состоит из двух датчиков ускорения для перпендикулярных друг другу отдельных составляющих ускорения, то можно определить вертикально и горизонтально пройденные пути главной части 10. Отрезки пути определяются путем двукратного интегрирования посредством соответствующих составляющих ускорения. В этих случаях можно различать между ходьбой вверх и вниз по лестнице и соответственно настраивать упоры для амортизирующих свойств при плантарной и дорсальной флексиях.
Аналогичным образом ускорения могут использоваться для того, чтобы настроить ходьбу с разной скоростью за счет смещения упоров в дорсальную сторону и соответствующего изменения амортизирующих свойств при плантарной и дорсальной флексиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРТОПЕДИЧЕСКАЯ ЧАСТЬ СТОПЫ И СПОСОБ УПРАВЛЕНИЯ ИСКУССТВЕННОЙ СТОПОЙ | 2009 |
|
RU2473323C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРТОПЕДИЧЕСКИМ СУСТАВОМ | 2008 |
|
RU2484789C2 |
| ИСКУССТВЕННАЯ СТОПА И СПОСОБ УПРАВЛЕНИЯ ЕЕ ДВИЖЕНИЕМ | 2007 |
|
RU2419398C2 |
| ИСКУССТВЕННАЯ СТОПА | 2006 |
|
RU2434606C2 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2652893C2 |
| УНИВЕРСАЛЬНЫЙ ДИНАМИЧЕСКИЙ КОРРЕКТОР СТОПЫ ДЛЯ БОЛЬНЫХ С НАРУШЕНИЕМ ПОЗЫ И ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ЦЕНТРАЛЬНОГО ПРОИСХОЖДЕНИЯ | 1997 |
|
RU2117464C1 |
| ПРОТЕЗ СТОПЫ С НАСТРАИВАЕМЫМИ ХАРАКТЕРИСТИКАМИ | 2005 |
|
RU2345737C2 |
| СПОСОБ УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ФАЗЫ ОСТАНОВКИ ИСКУССТВЕННОГО КОЛЕННОГО СУСТАВА | 2016 |
|
RU2715683C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРТЕЗОМ ИЛИ ПРОТЕЗОМ СУСТАВА | 2010 |
|
RU2533967C2 |
| ИСКУССТВЕННАЯ СТОПА | 2005 |
|
RU2352297C2 |

Группа изобретений относится к ортопедии. Пассивное ортопедическое вспомогательное средство в виде протеза или ортеза стопы содержит первую часть, соединенную с возможностью вращения через вращательный шарнир со второй частью, сенсорное устройство для измерения параметров, позволяющих делать выводы об эксплуатационных потребностях вспомогательного средства в данный момент, связанное с управляющим устройством управление для определения эксплуатационных потребностей и формирования соответствующих управляющих сигналов, управляемое гидравлическое амортизирующее устройство, с помощью которого можно изменять воздействующее на вращательное движение между первой и второй частями сопротивление движению, и преобразующее управляющие сигналы процессорного устройства для управления амортизирующим устройством. Демпфирующее устройство представляет собой гидравлический цилиндр двойного действия с двумя отделенными друг от друга поршнем гидравлическими камерами. Гидравлические камеры сообщены двумя обеспечивающими течение гидравлической жидкости только в противоположных направлениях соединительными линиями, гидродинамические сопротивления которых устанавливаются посредством управления по отдельности с помощью собственного исполнительного органа. Процессорное устройство рассчитано на определение актуального положения нулевой точки по измеренным параметрам сенсорного устройства. Формирование управляющих сигналов гидродинамических сопротивлений происходит в обеих соединительных линиях по отношению к положению нулевой точки. Способ управления вышеуказанным средством заключается в том, что определяют положение нулевой точки вращательного движения, начиная с которого при циклическом процессе движения определяют сопротивление движению, по меньшей мере, в одном направлении движения. Изобретение обеспечивает лучшую адаптацию к поведению естественной стопы. 2 н. и 12 з. п. ф-лы, 5 ил.
1. Пассивное ортопедическое вспомогательное средство в виде протеза или ортеза стопы, содержащее первую часть, соединенную с возможностью вращения через вращательный шарнир со второй частью, сенсорное устройство для измерения параметров, позволяющих делать выводы об эксплуатационных потребностях вспомогательного средства в данный момент, связанное с управляющим устройством управление для определения эксплуатационных потребностей и формирования соответствующих управляющих сигналов, управляемое гидравлическое амортизирующее устройство, с помощью которого можно изменять воздействующее на вращательное движение между первой и второй частями сопротивление движению, и преобразующее управляющие сигналы процессорного устройства для управления амортизирующим устройством, отличающееся тем, что демпфирующее устройство представляет собой гидравлический цилиндр двойного действия с двумя отделенными друг от друга поршнем гидравлическими камерами, гидравлические камеры сообщены двумя, обеспечивающими течение гидравлической жидкости только в противоположных направлениях соединительными линиями, гидродинамические сопротивления которых устанавливаются посредством управления по отдельности с помощью собственного исполнительного органа, процессорное устройство рассчитано на определение актуального положения нулевой точки по измеренным параметрам сенсорного устройства, при этом формирование управляющих сигналов гидродинамических сопротивлений происходит в обеих соединительных линиях по отношению к положению нулевой точки.
2. Средство по п.1, отличающееся тем, что гидродинамическое сопротивление, по меньшей мере, в одной соединительной линии может быть установлено большим с возможностью фиксации вращательного шарнира в любом положении.
3. Средство по п.2, отличающееся тем, что фиксированное положение соответствует положению нулевой точки.
4. Средство по п.1, отличающееся тем, что положение нулевой точки определяется в зависимости от наклона основания.
5. Средство по п.4, отличающееся тем, что положение нулевой точки определяется в зависимости от актуальной высоты каблука, используемой с вспомогательным средством обуви.
6. Средство по п.1, отличающееся тем, что его части выполнены преимущественно жесткими, при этом управление, по меньшей мере, одной преобладающей частью процесса движения в пределах цикла движения происходит без влияния упругости материала за счет управления гидродинамическими сопротивлениями.
7. Средство по п.3, отличающееся тем, что его части выполнены преимущественно жесткими, при этом управление, по меньшей мере, одной преобладающей частью процесса движения в пределах цикла движения происходит без влияния упругости материала за счет управления гидродинамическими сопротивлениями.
8. Средство по п.1, отличающееся тем, что вращательный шарнир представляет собой голеностопный сустав.
9. Средство по п.2, отличающееся тем, что вращательный шарнир представляет собой голеностопный сустав.
10. Средство по п.3, отличающееся тем, что вращательный шарнир представляет собой голеностопный сустав.
11. Средство по п.4, отличающееся тем, что вращательный шарнир представляет собой голеностопный сустав.
12. Способ управления пассивным ортопедическим вспомогательным средством в виде протеза или ортеза стопы, содержащим первую часть, соединенную с возможностью вращения через вращательный шарнир со второй частью, и амортизирующее устройство в виде гидравлического цилиндра двойного действия с двумя отделенными друг от друга поршнем гидравлическими камерами, причем гидравлические камеры сообщены двумя, обеспечивающими течение гидравлической жидкости только в противоположных направлениях соединительными линиями, гидродинамические сопротивления которых устанавливают посредством устройства управления по отдельности с помощью собственного исполнительного органа, причем определяют положение нулевой точки вращательного движения, начиная с которого при циклическом процессе движения определяют сопротивление движению, по меньшей мере, в одном направлении движения.
13. Способ по п.12, отличающийся тем, что вспомогательное средство фиксируют в нулевой точке для определенной эксплуатационной потребности за счет установления высоких сопротивлений движению в обоих направлениях движения.
14. Способ по п.12, применяемый к ортопедическому вспомогательному средству для нижней конечности, у которой цикл ходьбы используют в качестве управляемого цикла движения.
| WO 2006112774 А1, 26.10.2006 | |||
| US 2009030530 A1, 29.01.2009 | |||
| US 2007027555 A1, 01.02.2007 | |||
| ИСКУССТВЕННАЯ СТОПА ДЛЯ ПРОТЕЗОВ НИЖНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2086213C1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |
| ПРОТЕЗ СТОПЫ | 1998 |
|
RU2150916C1 |

