Изобретение относится к области автоматики и вычислительной техники, а именно к преобразующим элементам систем цифрового управления, формирующим в цифровом виде точную информацию о текущих угловых положениях подвижных частей объекта регулирования.
Известен амплитудный цифровой преобразователь угла (ЦПУ) следящего типа (Следящие приводы: В 3 т. 2-е изд., перераб. и доп. /Под ред. Б.К.Чемоданова. Т.2: Электрические следящие приводы/ Е.С.Блейз, В.Н.Бродовский, В.А.Введенский и др. - М: Изд-во МГТУ им.Н.Э.Баумана, 2003. - 880 с.: ил., стр.84), выбранный в качестве аналога, в котором используются: 2-фазный датчик угла (ДУ) с синусно-косинусными выходными зависимостями U1 и U2 и с угловым положением ротора α; генератор напряжения возбуждения (ГВ) ДУ; электронный аналог СКВТ-приемника (ЭА); фазовый детектор (ФД) с интегрирующим звеном; преобразователь напряжения в частоту (ПНЧ) и реверсивный двоичный счетчик (PC) с текущим значением кода N, который является выходным кодом ЦПУ. При этом в состав СКВТ - приемника (Следящие приводы: В 3 т. 2-е изд., перераб. и доп. /Под ред. Б.К.Чемоданова. Т.2: Электрические следящие приводы/ Е.С.Блейз, В.Н.Бродовский. В.А.Введенский и др. - М: Изд-во МГТУ им.Н.Э.Баумана, 2003. - 880 с.: ил., стр.83) входят два функциональных цифроаналоговых преобразователя (ФЦАП) выходных напряжений ДУ и аналоговый сумматор выходных напряжений ФЦАП.
Использование в аналоге в качестве опорного напряжения (UОП) демодулятора выходного напряжения (UB) генератора возбуждения ДУ ограничивает достижимую таким следящим устройством точность преобразования из-за погрешности формирования сигнала рассогласования между текущим значением углового положения α и текущим значением выходного двоичного кода N, вызываемой возможным нарушением синфазности преобразуемого и опорного напряжения демодулятора.
ЦПУ следящего типа (патент RU №2365032) обеспечивает повышение точности преобразования по отношению к аналогу за счет использования формирователя синфазного опорного напряжения (ФОН) демодулятора. Выходной сигнал ФОН при всех условиях строго синхронизирован по временной фазе с временной фазой преобразуемого напряжения демодулятора, так как он формируется непосредственно из выходных сигналов переменного тока ДУ. Указанный ЦПУ выбран в качестве прототипа, как наиболее близкий к предлагаемому устройству.
Прототип содержит датчик угла; генератор напряжения возбуждения датчика угла; электронный аналог СКВТ - приемника; демодулятор с интегрирующим звеном; преобразователь напряжения в частоту; реверсивный двоичный счетчик с текущим значением кода N, представляющим собой выходной код ЦПУ и формирователь опорного напряжения. При этом выход генератора возбуждения подключен к первому входу формирователя опорного напряжения, выходы датчика угла подключены к второму, третьему входам формирователя опорного напряжения и к первому, второму аналоговым входам электронного аналога СКВТ-приемника соответственно, выход которого подключен к входу преобразуемого напряжения демодулятора с интегрирующим звеном, вход опорного напряжения демодулятора подключен к первому выходу формирователя опорного напряжения, выход демодулятора с фильтром подключен непосредственно к входу управления направлением счета реверсивного двоичного счетчика и через преобразователь напряжения в частоту к счетному входу реверсивного двоичного счетчика, выход которого подключен к цифровому входу электронного аналога СКВТ-приемника.
Недостаток прототипа заключается в том, что он не обеспечивает точного преобразования сигналов реальных ДУ, в выходных зависимостях которых, кроме первой, присутствуют третья, пятая, седьмая и девятая пространственные гармоники (свойство реальных квазисинусоидальных ДУ).
Предлагаемый ЦПУ устраняет указанный недостаток путем формирования дополнительных составляющих напряжения рассогласования, минимизирующих негативное влияние квазисинусоидальности ДУ на точность преобразования. При указанном формировании в качестве базового напряжения используются существующие (промежуточные) сигналы формирователя опорного напряжения вида минус |U1| и |U2|. Задача повышения точности преобразования решается следующим образом.
В амплитудный ЦПУ следящего типа, содержащий датчик угла с выходными зависимостями U1 и U2; генератор напряжения возбуждения датчика угла; электронный аналог СКВТ-приемника; демодулятор с интегрирующим звеном; преобразователь напряжения в частоту; реверсивный двоичный счетчик с текущим значением кода N, представляющим собой выходной код ЦПУ, и формирователь опорного напряжения демодулятора, в котором выход генератора напряжения возбуждения подключен к обмотке возбуждения датчика угла и к первому входу формирователя опорного напряжения, выходы первой и второй фаз датчика угла подключены к второму, третьему входам формирователя опорного напряжения и к первому, второму аналоговым входам электронного аналога СКВТ - приемника соответственно, выход которого подключен к входу преобразуемого напряжения демодулятора, вход опорного напряжения демодулятора подключен к первому выходу формирователя опорного напряжения, выход демодулятора подключен непосредственно к входу управления направлением счета реверсивного счетчика и через преобразователь напряжения в частоту к счетному входу реверсивного двоичного счетчика, выход которого (поразрядно) подключен к цифровому входу электронного аналога СКВТ-приемника, дополнительно введены первый, второй аналоговые сумматоры и первый, второй функциональные цифроаналоговые преобразователи. При этом второй и третий выходы формирователя опорного напряжения с сигналами вида минус |U1| и |U2| через первый аналоговый сумматор подключены к аналоговому входу первого функционального цифроаналогового преобразователя, выход которого подключен к аналоговому входу второго функционального цифроаналогового преобразователя и к первому входу второго аналогового сумматора, к второму входу которого подключен выход второго функционального цифроаналогового преобразователя, цифровые входы первого и второго цифроаналоговых преобразователей подключены к выходу реверсивного двоичного счетчика, а выход второго аналогового сумматора - к третьему входу электронного аналога СКВТ-приемника.
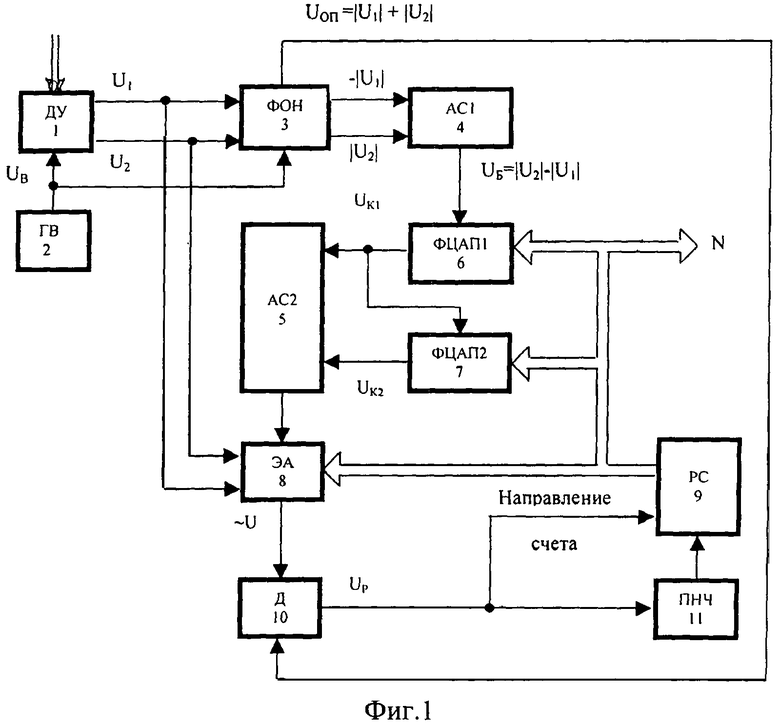
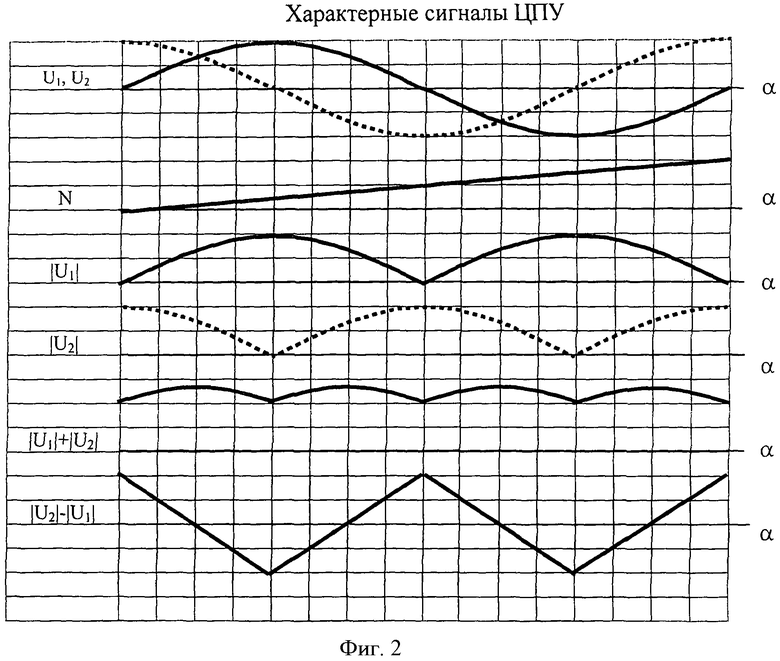
На фиг.1 приведена функциональная схема предлагаемого амплитудного ЦПУ следящего типа; на фиг.2 показаны изменения характерных сигналов ЦПУ по аргументу α (при условии α=2πN).
Функциональная схема предлагаемого ЦПУ содержит датчик угла (ДУ) 1; генератор напряжения возбуждения (ГВ) 2 ДУ; формирователь опорного напряжения (ФОН) 3; первый и второй аналоговые сумматоры (АС1 и АС2) 4 и 5; первый и второй функциональные цифроаналоговые преобразователи (ФЦАП1 и ФЦАП2) 6 и 7; электронный аналог СКВТ-приемника (ЭА) 8; реверсивный двоичный счетчик (PC) 9; демодулятор с интегрирующим звеном (Д) 10 и преобразователь напряжения в частоту (ПНЧ) 11.
На чертеже приняты следующие обозначения: α - угловое положение ротора ДУ 1; UB - выходное напряжение переменного тока генератора возбуждения ГВ 2 (напряжение возбуждения ДУ 1); U1 и U2 - выходные зависимости ДУ 1; UОП=|U1|+|U2| - сигнал на первом выходе ФОН 3; минус |U1| и |U2| - сигналы на втором и третьем выходах формирователя опорного напряжения ФОН 3; UБ=|U2|-|U1| - сигнал на выходе первого аналогового сумматора АС1 4; ~UP - напряжение рассогласования переменного тока на выходе электронного аналога СКВТ-приемника ЭА 8; Up - напряжение рассогласования постоянного тока на выходе демодулятора с интегрирующим звеном Д 10; UK1, UK2 - выходные напряжения ФЦАП1, ФЦАП2 и N - выходной код ЦПУ.
Формирование выходного кода N ЦПУ осуществляется следующим образом. При возбуждении ДУ 1 выходным напряжением UB генератора напряжения возбуждения ГВ 2 на фазных выходах ДУ индуцируются напряжения переменного тока с зависимостями вида U1 и U2, которые поступают на первый и второй аналоговые входы ЭА 8 и на второй, третий входы ФОН 3. При этом на первый вход ФОН 3 поступает выходное напряжение ГВ, а на цифровой вход ЭА 8 - текущее значение двоичного кода с поразрядных выходов PC 9. По известному закону взаимодействия ДУ и ЭА 8 формируется сигнал рассогласования ~UP в виде напряжения переменного тока, который характеризует соотношение между текущими угловым положением α ротора ДУ и двоичным кодом N. Напряжение рассогласования ~UP поступает на вход преобразуемого напряжения демодулятора Д 10, на вход опорного напряжения которого поступает напряжение с первого выхода ФОН 3, синфазное с преобразуемым напряжением. Выходное напряжение демодулятора с интегрирующим звеном Д 10 в виде напряжения постоянного тока Up управляет направлением счета PC 9 и частотой выходных импульсов ПНЧ 11, поступающих на счетный вход PC 9 и изменяющих текущее значение кода N. С учетом того, что в ЦПУ реализован следящий принцип преобразования, изменение текущего значения кода PC 9 прекращается при выполнении условия UP=0 (отсутствие рассогласования), которое соответствует точному преобразованию угла в код сигналов ДУ с синусно-косинусными зависимостями.
Описанный алгоритм преобразования полностью соответствует алгоритму преобразования прототипа. При использовании реальных ДУ точность указанного преобразования может снижаться из-за квазисинусоидальности ДУ. Нейтрализация негативного влияния квазисинусоидальности ДУ на точность преобразования угла в код осуществляется следующим образом.
Сигналы вида минус |U1| и |U2|, присутствующие на втором и третьем выходах формирователя опорного напряжения ФОН 3, суммируются первым аналоговым сумматором АС1 и в суммарном виде (UB=|U2|-|U1|) поступают на аналоговый вход первого функционального цифроаналогового преобразователя ФЦАП1 6, коэффициент передачи которого определяется текущим значением выходного кода двоичного реверсивного счетчика PC 9. Выходное напряжение первого функционального цифроаналогового преобразователя ФЦАП1 6 поступает на аналоговый вход второго функционального цифроаналогового преобразователя ФЦАП2 7. Его коэффициент передачи также определяется текущим значением выходного кода двоичного реверсивного счетчика PC 9. Выходные напряжения UK1 и UK1 первого и второго ФЦАП поступают на первый и второй входы второго аналогового сумматора АС2 5 и в суммарном виде поступают на третий вход электронного аналога ЭА 8. При этом коэффициенты передачи по первому и второму входам аналогового сумматора АС2 5 выбираются из условия минимизации погрешности преобразования углового положения ротора квазисинусоидального ДУ в двоичный код в процессе выполнения простейших регулировочных операций. Напряжение UK1, изменяющееся по закону, близкому к sin8πN, устраняет негативное влияние третьей и пятой пространственных гармоник квазисинусоидального ДУ на точность преобразования, a UK2, изменяющееся по закону, близкому к sin16πN, - седьмой и девятой гармоник.
Эффективность использования предлагаемого ЦПУ проверена испытаниями математических моделей и физических образцов. Установлено, что по отношению к прототипу максимальная погрешность снижается почти на два десятичных порядка, т.е. становится исчезающе малой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365057C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2012 |
|
RU2517055C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2003 |
|
RU2259631C2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308148C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1312737A1 |
Изобретение относится к области автоматики и вычислительной техники и может найти применение для управления угловым положением подвижных частей объекта регулирования. Достигаемый результат заключается в обеспечении точного преобразования угла в код следящего типа с использованием реальных двухфазных датчиков угла, огибающие выходных напряжений которых могут содержать третью, пятую, седьмую и девятую пространственные гармоники той или иной величины. Результат достигается за счет введения в состав цифрового преобразователя угла соответствующих цепей коррекции при использовании формирователя сигналов, корректирующих составляющие погрешности преобразования вида sin4α и sin8α, где α - угловое положение ротора двухфазного датчика угла. При указанном формировании в качестве базового напряжения используются существующие (промежуточные) сигналы формирователя опорного напряжения вида минус |U1| и |U2|. 2 ил.
Цифровой преобразователь угла следящего типа, содержащий: датчик угла с выходными зависимостями U1 и U2; генератор напряжения возбуждения датчика угла; электронный аналог СКВТ-приемника; демодулятор с интегрирующим звеном; преобразователь напряжения в частоту; реверсивный двоичный счетчик с текущим значением кода N, представляющим собой выходной код ЦПУ и формирователь опорного напряжения, при этом выход генератора возбуждения подключен к первому входу формирователя опорного напряжения, выходы датчика угла подключены к второму, третьему входам формирователя опорного напряжения и к первому, второму аналоговым входам электронного аналога СКВТ-приемника соответственно, выход которого подключен к входу преобразуемого напряжения демодулятора с интегрирующим звеном, вход опорного напряжения демодулятора подключен к первому выходу формирователя опорного напряжения, выход демодулятора с интегрирующим звеном подключен непосредственно к входу управления направлением счета реверсивного двоичного счетчика и через преобразователь напряжения в частоту к счетному входу реверсивного двоичного счетчика, выход которого подключен к цифровому входу электронного аналога СКВТ-приемника, отличающийся тем, что в него дополнительно введены первый, второй аналоговые сумматоры и первый, второй функциональные цифроаналоговые преобразователи, при этом второй и третий выходы формирователя опорного напряжения с сигналами вида минус |U1| и |U2| подключены через первый аналоговый сумматор к аналоговому входу первого функционального цифроаналогового преобразователя, выход которого подключен к аналоговому входу второго функционального цифроаналогового преобразователя и к первому входу второго аналогового сумматора, к второму входу второго аналогового сумматора подключен выход второго функционального цифроаналогового преобразователя, объединенные цифровые входы первого и второго функциональных цифроаналоговых преобразователей подключены к выходу реверсивного двоичного счетчика, а выход второго аналогового сумматора - к третьему входу электронного аналога СКВТ-приемника.
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365057C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308148C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ АМПЛИТУДНЫХ ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА СЛЕДЯЩЕГО ТИПА | 2004 |
|
RU2269867C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2003 |
|
RU2259631C2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2001 |
|
RU2210184C2 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1515365A1 |
| US 4754259, 28.06.1988 | |||
| US 3851329, 26.11.1974 | |||
| US 4156234, 22.05.1979. | |||

