Перекрестная ссылка на родственные заявки
Данная заявка испрашивает приоритет предварительной заявки США № 60/591,694 на “Surgical Instrument Incorporating an Electrically Actuated Articulation Mechanism”, Shelton IV, поданной 28 июля 2004 г.
Данная заявка является частичным продолжение патентной заявки США № 10/615,971 на “Surgical Stapling Instrument Having Articulation Joint Support Plates for Supporting a Firing Bar”, Wales et al., поданной 09 июля 2003 г. и включенной в данную заявку полностью в качестве ссылки.
Область техники
Изобретение, в общем, относится к хирургическим инструментам, применяемым для эндоскопического введения концевого рабочего органа (напр., применяемые в эндоскопии режущие инструменты, захват, режущие устройства, степлеры, устройство для наложения зажимов, устройство обеспечения доступа, устройство введения лекарственных средств/генной терапии, и энергоустройство, использующее ультразвук, радиочастоту, лазер и пр.) к месту выполнения хирургической операции, и в частности - к этим хирургическим инструментам, содержащим шарнирный вал.
Уровень техники
Эндоскопические хирургические инструменты часто являются более предпочтительными, чем обычные хирургические устройства, применяемые в открытых операциях, поскольку меньшие по размеру надрезы сокращают время послеоперационного выздоровления и дают меньше осложнений. Поэтому в последнее время многие разработки направлены на создание ассортимента эндоскопических хирургических инструментов, целесообразных для точного размещения дистального концевого рабочего органа на нужном для проведения хирургической операции участке через канюлю троакара. Эти дистальные концевые рабочие органы разными способами обрабатывают ткань в диагностических или терапевтических целях (напр., применяемые в эндоскопии режущие инструменты, захват, режущие устройства, степлеры, устройство для наложения зажимов, устройство обеспечения доступа, устройство введения лекарственных средств/генной терапии, и энергоустройство, использующее ультразвук, радиочастоту, лазер и пр.)
Позиционирование концевого рабочего органа ограничивается троакаром. Эти эндоскопические хирургические инструменты, как правило, содержат удлиненный вал между концевым рабочим органом и рукояточной частью, которой действует врач. Этот удлиненный вал обеспечивает возможность введения на нужную глубину и поворота вокруг продольной оси вала, в результате чего становится возможным позиционирование концевого рабочего органа в той или иной степени. При надлежащем размещении троакара и применении захватов, например через другой троакар, эта степень позиционирования часто является достаточной. Хирургические инструменты для наложения скобок и разрезания, подобные описываемым в патенте США № 5,465,895, являются примером эндоскопического хирургического инструмента, который успешно позиционирует концевой рабочий орган путем его введения и поворота.
Более поздняя заявка США № 10/443,617 на “Surgical Stapling Instrument Incorporating an E-Beam Firing Mechanism”, Shelton et al., поданная 20 мая 2003 г. и включенная в данный документ полностью в качестве ссылки, описывает усовершенствованный «Е-образный» стержень запуска для разрезания ткани и наложения скобок. Некоторые дополнительные преимущества включают в себя надежное размещение с промежутком губок концевого рабочего органа, в частности, узла наложения скобок, даже если будет зажат несколько больший или меньший объем ткани, чем это требуется для оптимального формирования скобок. Причем Е-образный стержень запуска находится в зацеплении с концевым рабочим органом и картриджем скобок таким образом, что обеспечивает возможность выполнения нескольких целесообразных блокировок.
В зависимости от характера операции может стать желательным последующее регулирование позиционирования концевого рабочего органа эндоскопического хирургического инструмента. Так, нередко нужно ориентировать концевой рабочий орган по оси, поперечной по отношению к продольной оси вала инструмента. Поперечное перемещение концевого рабочего органа относительно вала инструмента обычно называют термином «шарнирное вращение». Это обычно выполняется при помощи шарнирного соединения, которое размещено в удлиненном валу непосредственно вблизи узла наложения скобок. Это техническое решение позволяет хирургу осуществлять шарнирный поворот узла наложения скобок дистанционно в ту или иную сторону для лучшего хирургического размещения линий скобок и для более легкого манипулирования тканью и ее ориентирования. Это шарнирное позиционирование позволяет врачу с большей легкостью обрабатывать ткань в некоторых случаях, например ткань позади органа. Помимо этого, шарнирное позиционирование, как преимущество, позволяет позиционировать эндоскоп позади концевого рабочего органа, при этом без блокирования его валом инструмента.
Технические решения по обеспечению шарнирного хирургического инструмента для наложения скобок осложняются тем, что необходимо обеспечить средства управления шарнирным поворотом и еще управления закрыванием концевого рабочего органа, чтобы зажать ткань и привести в действие концевой рабочий орган (т.е. осуществить сшивание скобками и рассечение) в пределах ограничений, налагаемых малым диаметром эндоскопического инструмента. Обычно все три управляющих движения передаются через вал как продольные поступательные движения. Например, патент США № 5,673,840 раскрывает шарнирный механизм типа гармошки («гибкая шейка»), который осуществляет шарнирное вращение избирательным отведением назад одного из двух соединительных стрежней через вал инструмента; причем каждый стержень смещается соответственно на противоположных сторонах геометрической оси вала. Соединительные стержни приводятся в движение от храпового механизма через ряд дискретных положений.
Патентная заявка США № 10/615,971 описывает опорные пластины, направляющие стержень запуска через поворотное шарнирное соединение. Упругие или пружинные средства на одном или обоих концах компенсируют изменение радиального расстояния между внутренней и внешней опорными пластинами, тем самым обеспечивая интервал между ними во избежание помех друг другу. Таким образом, исключаются случаи ненужного срабатывания стержня запуска, без ухудшения рабочих показателей, как то - увеличение усилия, требуемого для приведения в действие механизма запуска.
Несмотря на то, что эти хорошо известные методы обеспечивают успешное поддерживание стержня запуска в шарнирном соединении хирургического инструмента для наложения скобок и разрезания, но все же желательно обеспечить дальнейшее улучшение его рабочих показателей.
Поэтому имеется существенная необходимость в усовершенствованном шарнирном хирургическом инструменте, в котором стержень запуска будет поддерживаться по всему шарнирному соединению.
Сущность изобретения
Данное изобретение устраняет отмечаемые выше и прочие недостатки известного уровня техники путем обеспечения хирургического инструмента с шарнирным валом, установленным между рукояткой и концевым рабочим органом. Пара выполненных из электроактивного полимера (ЭАП) опорных элементов расположена в шарнирном соединении вала и срабатывает от электрического сигнала, проходящего по стволу. Каждый элемент выровнен с продольной осью шарнирного соединения и смещен от нее в поперечном направлении. Приведение в действие выбираемого выполненного из ЭАП опорного элемента вызывает продольное изменение габарита, содействуя шарнирному повороту.
Согласно одной из особенностей настоящего изобретения хирургический инструмент содержит концевой рабочий орган, который приводится в действие стержнем запуска, поступательно перемещающимся в удлиненном валу. ЭАП-опора располагается на каждой боковой стороне стержня запуска при его прохождении через шарнирное соединение. Путем изменения размеров изменение величины радиуса поворота ЭАП-опорного элемента на внутренней стороне шарнирного сгиба по отношению к ЭАП-опорному элементу на внешней стороне сохраняется с промежутком для эффективного направления стержня запуска, без заедания стержня.
Согласно еще одной особенности настоящего изобретения шарнирный вал хирургического инструмента поддерживается при шарнирном вращении парой смещенных в поперечном направлении, выровненных в продольном направлении опорных ЭАП-элементов, один конец которых ограничен в продольном направлении, и другой конец которых размещен с возможностью скольжения. Опорные ЭАП-элементы выполнены с возможностью их изгиба при приведении их в действие, чтобы содействовать шарнирному повороту.
Согласно еще одной особенности настоящего изобретения шарнирный вал хирургического инструмента опирается, при осуществлении шарнирного поворота, на пару смещенных в поперечном направлении, выровненных в продольном направлении опорных ЭАП-элементов, оба конца которых в продольном направлении ограничены, соответственно, в проксимальном и дистальном концах шарнирного соединения. Опорные ЭАП-элементы выполнены с возможностью изменения продольной длины при приведении их в действие, чтобы содействовать шарнирному повороту.
Хирургический инструмент согласно изобретению содержит:
рукояточную часть, включающую в себя:
схему управления шарнирным поворотом, выполненную с возможностью формирования сигнала осуществления шарнирного поворота,
механизм запуска, содержащий поступательно перемещающийся в продольном направлении стержень запуска;
удлиненный вал, прикрепленный к рукоятке и содержащий прорезь, направляющую стержень запуска; и
концевой рабочий орган, прикрепленный со стороны дистального конца к удлиненному валу и приводимый в действие дистальным концом стержня запуска;
шарнирное соединение, соединяющее удлиненный вал с концевым рабочим органом и в сообщении с сигналом осуществления шарнирного поворота, поступающим по удлиненному валу; и
пару выполненных из электроактивного полимера опорных элементов, установленных в шарнирном соединении на каждой боковой стороне стержня запуска и реагирующих на сигнал осуществления шарнирного поворота, чтобы осуществлять регулирование размера, компенсируя осуществление шарнирного поворота в выбранную боковую сторону.
Второй вариант хирургического инструмента содержит:
рукояточную часть, имеющую схему управления шарнирным поворотом, выполненную с возможностью формирования сигнала осуществления шарнирного поворота,
удлиненный вал, прикрепленный к рукояточной части; и
концевой рабочий орган, прикрепленный со стороны дистального конца к удлиненному валу;
шарнирное соединение, соединяющее удлиненный вал с концевым рабочим органом и в сообщении с сигналом осуществления шарнирного поворота, поступающим по удлиненному валу; и
пару выполненных из электроактивного полимера опорных элементов, установленных на боковых сторонах шарнирного соединения; при этом один конец каждого элемента ограничен в продольном направлении и другой конец размещен с возможностью скольжения, каждый из упомянутых элементов выровнен с и смещен от продольной оси удлиненного вала; причем каждый выполненный из электроактивного полимера опорный элемент реагирует на сигнал осуществления шарнирного поворота тем, что изгибается в поперечном направлении.
Еще один вариант хирургического инструмента содержит:
рукояточную часть, имеющую схему управления шарнирным поворотом, выполненную с возможностью формирования сигнала осуществления шарнирного поворота,
удлиненный вал, прикрепленный к рукояточной части; и
концевой рабочий орган, прикрепленный к удлиненному валу;
шарнирное соединение, соединяющее удлиненный вал с концевым рабочим органом и в сообщении с сигналом осуществления шарнирного поворота, поступающим по удлиненному валу; и
пару выполненных из электроактивного полимера опорных элементов, установленных на боковых сторонах шарнирного соединения; при этом оба конца каждого упомянутого элемента в продольном направлении ограничены в нем, выровнены с и смещены от продольной оси удлиненного вала; причем каждый выполненный из электроактивного полимера опорный элемент реагирует на сигнал осуществления шарнирного поворота тем, что избирательно удлиняется и укорачивается.
Эти и прочие объекты и преимущества настоящего изобретения поясняются прилагаемыми чертежами и его описанием.
Краткое описание чертежей
Прилагаемые чертежи, составляющие часть данного описания, поясняют осуществления изобретения, и в совокупности с приводимым выше общим описанием изобретения и излагаемым ниже подробным его описанием поясняют его принципы.
Фиг.1 - изображение в перспективе и сзади эндоскопического хирургического сшивающего инструмента для осуществления хирургического наложения скобок и разрезания в открытом состоянии без шарнирного поворота.
Фиг.2 - изображение в перспективе слоистого композита, выполненного из электроактивного полимера.
Фиг.3 - изображение в перспективе привода в виде ЭАП-пластины, сформированного в виде пакета склеенного множества слоистых ЭАП-композитов, показанных на Фиг.2.
Фиг.4 - изображение в перспективе местного сечения, выполненного по продольной оси сокращающегося волоконного ЭАП-привода.
Фиг.5 - фронтальная вертикальная проекция сечения по линии 5-5 сокращающегося волоконного ЭАП-привода, показанного на Фиг.4.
Фиг.6 - фронтальное правое изображение в перспективе шарнирного соединения, приводимого в действие с помощью ЭАП, для хирургического инструмента, показанного на Фиг.1, с узлом гибкой закрывающей гильзы, узлом поворотного каркаса и закрытым узлом наложения скобок.
Фиг.7 - фронтальное правое изображение в перспективе шарнирного соединения, приводимого в действие с помощью ЭАП, и закрытого узла наложения скобок, показанного на Фиг.6; узел гибкой закрывающей гильзы удален и узел одиночного поворотного каркаса показан с частичным пространственным разделением деталей.
Фиг.8 - фронтальное правое, с пространственным разделением деталей, изображение шарнирного соединения, приводимого в действие при помощи ЭАП, и узла наложения скобок, показанного на Фиг.6.
Фиг.9 - подробное изображение узла одиночного поворотного каркаса, с пространственным разделением деталей, содержащей волоконные ЭАП-приводы, показанные на Фиг.7.
Фиг.10 - правая боковая вертикальная проекция сечения по линиям 10-10 фиг.6, по оси поворота приводимого в действие при помощи ЭАП шарнирного соединения; справа показана пара волоконных ЭАП-приводов.
Фиг.11 - горизонтальная проекция сечения по линии 11-11 Фиг.11, по продольной оси действующего от ЭАП шарнирного соединения; внизу показан нижний рычаг момента и нижние волоконные ЭАП-приводы.
Фиг.12 - фронтальная проекция сечения по линии 12-12 Фиг.10, вдоль поперечных волоконных ЭАП-приводов.
Фиг.13 - горизонтальная проекция действующего от ЭАП шарнирного соединения, показанного на Фиг.11; правые верхний и нижний волоконные ЭАП-приводы сокращены, чтобы шарнирно повернуть узел наложения скобок влево.
Фиг.14 - фронтальное изображение справа в перспективе дополнительного альтернативного действующего от ЭАП шарнирного соединения, которое содержит двойной узел поворотной закрывающей гильзы в проксимальном положении с открытым упором концевого рабочего органа.
Фиг.15 - фронтальное правое, с пространственным разделением деталей, изображение дополнительного альтернативного действующего от ЭАП шарнирного соединения, показанного на Фиг.14 и содержащего двойной узел поворотной закрывающей гильзы и одиночный узел поворотного каркаса.
Фиг.16 - правая боковая вертикальная проекция альтернативного действующего от ЭАП шарнирного соединения, выполненная в сечении по линии 16-16 Фиг.14; также показаны компоненты запуска.
Фиг.17 - горизонтальная проекция альтернативного действующего от ЭАП шарнирного соединения без шарнирного поворота, выполненная в сечении по линии 17-17 фиг.14.
Фиг.18 - горизонтальная проекция альтернативного действующего от ЭАП шарнирного соединения в состоянии шарнирного поворота влево, выполненная в сечении по линии 17-17 фиг.14.
Фиг.19 - еще одно альтернативное действующее от ЭАП шарнирное соединение, в состоянии небольшого шарнирного поворота; при этом сжимающийся волоконный ЭАП-привод установлен на выпрямление соединения.
Фиг.20 - правое фронтальное изображение в перспективе, с частичным пространственным разделением деталей, одиночного шарнирного соединения, содержащего ЭАП-механизм, блокирующий шарнирное вращение, который смещен в обычное блокирующее положение.
Фиг.21 - правое фронтальное подробное изображение в перспективе проксимальной части ЭАП-механизма, блокирующего шарнирное вращение на проксимальном участке каркаса одиночного поворотного шарнирного соединения.
Фиг.22 - горизонтальная проекция одиночного поворотного шарнирного соединения, показанного на Фиг.20.
Фиг.23 - правая боковая вертикальная проекция одиночного поворотного шарнирного соединения, показанного на фиг.22, выполненная в сечении по продольной геометрической оси по линии 23-23.
Фиг.24 - горизонтальная проекция одиночного поворотного шарнирного соединения, показанного на Фиг.23, выполненная в сечении по линии 24-24; показан зубчатый сегмент на верхнем поворотном хвостовике, заблокированной ЭАП-механизмом блокирования шарнирного вращения без шарнирного поворота.
Фиг.25 - горизонтальная проекция одиночного поворотного шарнирного соединения, показанного на Фиг.23, выполненная в сечении по геометрической оси по линии 24-24; внизу показан нижний поворотный выступ проксимального участка основания каркаса, частично поворачивающий шарнирно концевой рабочий орган влево, при этом ЭАП блокирующий механизм приведен в незаблокированное состояние.
Фиг.26 - фронтальная вертикальная проекция дистального основания каркаса одиночного поворотного шарнирного механизма, показанного на Фиг.24, выполненная в сечении по линии 26-26; показано прикрепление волоконных ЭАП-приводов, которые шарнирно поворачивают соединение.
Фиг.27 - фронтальная вертикальная проекция проксимального основания каркаса одиночного поворотного шарнирного соединения, показанного на Фиг.24, выполненная в сечении по линии 27-27; показаны пакетированные ЭАП-приводы и блокирующие штифты блокирующих механизмов, приводимых в действие при помощи ЭАП.
Фиг.28 - горизонтальная проекция, выполненная в сечении вдоль границы между верхним поворотным хвостовиком дистального основания каркаса и верхним поворотным выступом проксимального основания каркаса одиночного поворотного шарнирного соединения с удлиненными волоконными ЭАП-приводами, воздействующими на скругленные рычаги момента в комбинации с ЭАП блокирующим механизмом шарнирного вращения.
Фиг.29 - фронтальная вертикальная проекция, выполненная по существу в сечении через проксимальное основание каркаса и блокирующий ЭАП-механизм шарнирного вращения; также изображены расположенные далее рычаги момента и соединенные с ними удлиненные волоконные ЭАП-приводы.
Фиг.30 - горизонтальная проекция одиночного поворотного шарнирного соединения, выполненная в сечении по верхней поверхности верхнего поворотного выступа проксимального основания каркаса; поясняются расширяющиеся пакетированные ЭАП-приводы, воздействующие на рычаг момента, прикрепленный со стороны дистального конца к верхнему поворотному выступу, чтобы осуществлять шарнирный поворот совместно с обычно блокированным ЭАП блокирующим механизмом шарнирного поворота, который приводится в действие при подготовке шарнирного поворота.
Фиг.31 - фронтальная вертикальная проекция одиночного поворотного шарнирного соединения, показанного на Фиг.30, выполненная в сечении через верхний и нижний концевые штыри от рычага момента и через пакетированные ЭАП-приводы.
Фиг.32 - горизонтальная проекция одиночного поворотного шарнирного соединения, показанного на Фиг.30, выполненная в сечении по верхней поверхности верхнего поворотного выступа проксимального основания каркаса после шарнирного поворота дистального основания каркаса влево, но до выключения питания блокирующего механизма ЭАП-шарнирного поворота, для осуществления блокирования шарнирного поворота.
Фиг.33 - фронтальная вертикальная проекция одиночного поворотного шарнирного соединения, показанного на Фиг.31, выполненная в сечении через верхний и нижний концевые штыри рычагов момента и через расширившийся левый и сжавшийся правый пакетированные ЭАП-приводы.
Фиг.34 - правая боковая вертикальная проекция хирургического инструмента, с местным сечением узла закрывающей гильзы, чтобы показать действующий при помощи ЭАП шарнирный механизм, который осуществляет шарнирный поворот гибкого участка шарнирного каркаса.
Фиг.35 - горизонтальная проекция хирургического инструмента, показанного на Фиг.34 и шарнирно повернутого влево.
Фиг.36 - фронтальное правое изображение в перспективе участка шарнирного каркаса, показанного на Фиг.34 и содержащего приводы в виде ЭАП-пластин и блокирующие полосы.
Фиг.37 - горизонтальная проекция основания шарнирного каркаса, показанного на Фиг.34, в левом шарнирно повернутом положении; левая блокирующая ЭАП-полоса показана пунктиром в неблокированном состоянии и блокированном свободном состоянии.
Фиг.38 - горизонтальная проекция основания шарнирного каркаса, показанного на фиг.34 в левом шарнирно повернутом положении, в сечении через приводы в виде ЭАП-пластин и через блокирующие ЭАП-полосы.
Фиг.39 - фронтальная вертикальная проекция основания шарнирного каркаса, показанного на Фиг.37, выполненная по линии 39-39 через поперечные направляющие штифты.
Фиг.40 - горизонтальная проекция альтернативного основания шарнирного каркаса, выполненная в сечении через множество реберных расширяющих ЭАП-приводов.
Фиг.41 - правое изображение в перспективе, с частичным пространственным разделением деталей, дополнительного альтернативного основания шарнирного каркаса, имеющего множество волоконных ЭАП-приводов.
Фиг.42 - фронтальная вертикальная проекция дополнительного альтернативного основания шарнирного каркаса, показанного на Фиг.41, выполненная в сечении по линии 42-42.
Фиг.43 - горизонтальная проекция, выполненная в продольном сечении стержня запуска, проходящего через шарнирное соединение хирургического инструмента; при этом стержень запуска, предпочтительно в поперечном направлении, направляется опорными пластинами действующих внутрь приводов в виде ЭАП-пластин с одним скользящим концом.
Фиг.44 - горизонтальная проекция, выполненная в продольном сечении стержня запуска, проходящего через шарнирно повернутое шарнирное соединение хирургического инструмента, показанного на Фиг.43.
Фиг.45 - горизонтальная проекция, выполненная в продольном сечении стержня запуска, проходящего через шарнирно повернутое шарнирное соединение хирургического инструмента; стержень запуска в поперечном направлении предпочтительно направляется действующими наружу опорными ЭАП-пластинами с одним скользящим концом.
Фиг.46 - горизонтальная проекция, выполненная в продольном сечении стержня запуска, проходящего через шарнирное соединение хирургического инструмента; стержень запуска в поперечном направлении предпочтительно направляется действующими наружу опорными ЭАП-пластинами, имеющими ограничиваемые, но продольно двигающиеся крюкообразные концы.
Фиг.47 - горизонтальная проекция, выполненная в продольном сечении стержня запуска, проходящего через шарнирное соединение хирургического инструмента; при этом стержень запуска предпочтительно в поперечном направлении направляется действующими в наружном направлении опорными ЭАП-пластинами, причем каждая пластина имеет один зафиксированный крюкообразный конец и один пружинно-продольно ограничиваемый конец.
Фиг.48 - горизонтальная проекция, выполненная в продольном сечении стержня запуска, проходящего через шарнирное соединение хирургического инструмента; при этом стержень запуска предпочтительно в поперечном направлении направляется действующими в наружном направлении опорными ЭАП-пластинами, причем оба конца каждой пластины являются пружинно-продольно ограничиваемыми.
Фиг.49 - горизонтальная проекция гибкого шарнирного соединения, включающего в себя опорные ЭАП-пластины, показанные на Фиг.45 или 46.
Фиг.50 - фронтальная вертикальная проекция гибкого шарнирного соединения, показанного на Фиг.49, выполненная по линии 49-49.
Фиг.51 - горизонтальная проекция гибкого шарнирного соединения, показанного на Фиг.49; выполнен шарнирный поворот влево.
Фиг.52 - фронтальное правое изображение в перспективе гибкого шарнирного соединения, включающего в себя опорные ЭАП-пластины, показанные на Фиг.45 и 46, и также содержащего левый и правый выполненные в виде ЭАП-пластин приводы шарнирного поворота.
Фиг.53 - горизонтальная проекция шарнирного соединения, выполненная в сечении через продольную ось, при этом один конец пары опорных пластин согнут в наружном направлении и закреплен на одной стороне соединения, и другой их конец согнут в наружном направлении и упруго удерживается в углублении каркаса между противоположными ярусными ЭАП-приводами.
Фиг.54 - горизонтальная проекция шарнирного соединения, выполненная в сечении через продольную ось; при этом оба согнутых в наружном направлении конца пары опорных пластин упруго удерживаются в соответствующих углублениях каркаса между противоположными ярусными ЭАП-приводами.
Подробное описание изобретения
Описание шарнирного вала
Согласно Фиг.1 хирургический инструмент, представленный в виде хирургического для наложения скобок и разрезания инструмента 10, на своем дистальном конце имеет концевой рабочий орган узла 12 наложения скобок, отделенный от рукоятки 14 удлиненным валом 16. Узел 12 наложения скобок имеет желоб 18 для скобок, в котором помещен сменный картридж скобок 20. К желобу 18 для скобок прикреплен, с возможностью поворота, упор 22, который прижимает ткань к картриджу скобок 20 для последующего ее сшивания скобками и разрезания. Когда узел 12 наложения скобок закрыт, то его площадь сечения и также удлиненный вал 16 готовы для их вставки через небольшой хирургический проем, такой как канюля троакара (не показана).
Надлежащему размещению и ориентации узла 12 наложения скобок содействуют средства управления на рукоятке 14. В частности, поворотная ручка 30 поворачивает вал 16 вокруг его продольной оси и поэтому поворачивает узел 12 наложения скобок. Дополнительное позиционирование возможно в шарнирном соединении 32 в вале 16, который поворачивает узел 12 наложения скобок по дуге от продольной оси вала 16, в результате чего его можно разместить позади органа или можно ориентировать такие другие инструменты, как эндоскоп (не показан) позади узла 12 наложения скобок. Этот шарнирный поворот выполняется переключателем 34 управления шарнирным поворотом на рукоятке 14, который направляет электрический сигнал в шарнирное соединение 32, в выполненный из электроактивного полимера (ЭАП) привод 36, запитываемый контроллером ЭАП и источником питания в рукоятке 14.
После того как инструмент будет позиционирован и ткань будет находиться в узле 12 наложения скобок, хирург закрывает упор 22 перемещением закрывающего курка 40 к пистолетной рукоятке 42. После этого зажатия хирург может захватить расположенный далее курок запуска 44, при перемещении которого назад узел 12 наложения скобок срабатывает; и в некоторых вариантах выполнения это делается одним ходом запуска курка, и в других вариантах - несколькими. Запуск одновременно выполняет наложение по меньшей мере двух рядов скобок, при этом разрезая ткань между ними.
Отведение в исходное положение компонентов запуска может происходить автоматически после полного прохождения длины хода. Либо отводящий рычаг 46 можно оттянуть назад, чтобы выполнить это отведение. При отведенных компонентах запуска узел 12 наложения скобок можно разжать и открыть - при этом хирург слегка оттягивает закрывающий курок 40 назад в сторону пистолетной рукоятки 42 и нажимает на кнопку 48 высвобождения закрывания, и затем отпускает курок 40 закрывания, тем самым высвобождая два сшитых скобками конца рассеченной ткани из узла 12 наложения скобок.
Нужно отметить, что упоминаемые здесь такие пространственные термины, как «вертикальный», «горизонтальный» и пр., используются со ссылкой на чертежи, исходя из того, что продольная ось хирургического инструмента 10 является горизонтальной, причем упор 22 узла 12 наложения скобок установлен вертикально сверху, а курки 40, 44 - вертикально снизу рукоятки 14. Но на практике хирургический инструмент 10 может быть ориентирован под разными углами, и эти пространственные термины используются в отношении самого хирургического инструмента 10. Термин «проксимальный» используется для обозначения перспективы врача, который находится позади рукоятки 14 и размещает концевой рабочий орган 12 дистально, от себя.
Рукоятка
Согласно Фиг.1 узел 12 наложения скобок выполняет функции зажатия ткани, наложения скобок и разрезания ткани двумя отдельными движениями, передаваемыми в продольном направлении вала 16 через каркас вала (не показан на Фиг.1, но описан ниже с обращением к Фиг.7). Этот узел каркаса вала прикреплен со стороны проксимального конца к рукоятке 14 и соединен для поворота с поворотной ручкой 30. Поясняемая многоходовая рукоятка 14 для хирургического инструмента 10 согласно Фиг.1 более подробно описывается в находящихся патентных заявках США этого же владельца на “Surgical Stapling Instrument Incorporating a Multistroke Firing Position Indicator and Retraction Mechanism”, Swayze and Shelton, № 10/674,026, и на “Surgical Stapling Instrument Incroporating a Multi-Stroke Firing Mechanism with Automatic End of Firing Travel Retraction”, поданной 07 февраля 2005, Kevin R. Doll, Jeffrey S. Swayze, Frederick E. Shelton IV, Douglas B. Hoffman and Michael E. Setser, содержание которых включено полностью в данный документ в качестве ссылки, с дополнительными признаками и вариантами, излагаемыми здесь.
Несмотря на то, что многоходовая рукоятка 14 предпочтительно предусмотрена для устройств, развивающих значительные усилия запуска на большое расстояние, но устройства согласно данному изобретению могут предусматривать одноходовой запуск, например согласно находящейся на совместном рассмотрении патентной заявке США этого же владельца на “Surgical Stapling Instrument Having Separate Distinct Closing and Firing Systems”, Frederick E. Shelton IV, Michael Setser, Brian Hemmelgarn, № 10/441,632, содержание которой полностью входит в данный документ в качестве ссылки.
Электроактивные полимеры
Электроактивные полимеры (ЭАП) являются полимерами, имеющими в своем составе электропроводную присадку и изменяющими свою форму при приложении к ним электрического напряжения. По сути электропроводный полимер объединен в пару с некоторой формой ионной текучей среды, или гелем и электродами. Поток ионов из текучей среды/геля в электропроводный полимер, или из него, вводится прилагаемой разностью потенциала, и этот поток обусловливает изменение формы полимера. Разность потенциала имеет пределы 1-4 кВ, в зависимости от используемого полимера и ионной текучей среды. Некоторые ЭАП при приложении к ним напряжения сокращаются и некоторые - расширяются. Изменяющиеся под воздействием приложения к ним напряжения ЭАП можно объединить с таким механическим средством, как пружины или гибкие пластины.
Есть два основных типа ЭАП, и каждый из типов имеет много конфигураций. Двумя основными типами являются волоконный пучок и слоистый материал. Волоконный пучок состоит из волокон размером около 30 - 50 микрон. Эти волокна могут быть сотканы в такой пучок, как текстиль, и поэтому их часто называют ЭАП-нитями. Этот тип ЭАП сокращается при приложении к нему напряжения. Электроды обычно состоят из центрального сердечника и проводящей наружной оболочки, которая также содержит ионную жидкость, окружающую волоконные пучки. Пример выпускаемого промышленностью волоконного ЭАП: материал, изготавливаемый компанией Santa Fe Science and Тechnology под фирменным названием волокно PANION ТМ и описываемый в патенте США № 6,667,825, содержание которого полностью включено в данный документ в качестве ссылки.
Другим типом является слоистая структура, состоящая из слоя ЭАП-полимера, слоя ионного геля и двух гибких пластин, прикрепленных к обеим сторонам слоистого материала. При приложении напряжения квадратная пластина слоистого материала расширяется в одном направлении и сокращается в перпендикулярном направлении. Пример выпускаемого промышленностью слоистого ЭАП-материала (пластины): материал, который выпускается компанией Artificial Muscle Inc. - филиалом SRI Laboratories. Пластинчатый ЭАП-материал также выпускает компания ЕАМЕХ, Япония; этот материал называют тонкопленочным ЭАП.
Нужно отметить, что при приложении энергии ЭАП не изменяют объем; они просто расширяются или сокращаются в одном направлении, и при этом ведут себя противоположно в поперечном направлении. Слоистый вариант можно использовать в его основной форме путем удерживания его одной стороны на жесткой конструкции и использования его другой стороны в качестве поршня. Слоистый вариант можно также приклеить к той или иной стороне гибкой пластины. При запитывании одной стороны гибкой ЭАП-пластины она расширяется, сгибаясь в противоположном направлении. Это позволяет сгибать пластину в обе стороны, в зависимости от запитывания той или иной стороны.
Выполненный из ЭАП привод обычно состоит из многих слоев или волокон, объединенных в пучок для их совместного действия. Механическая конфигурация ЭАП определяет выполненный из ЭАП привод и его двигательные возможности. ЭАП можно выполнить в виде длинных прядей и обернуть их вокруг одиночного центрального электрода. Гибкая наружная оболочка будет формировать другой электрод для привода и также содержать ионную текучую среду, необходимую для функционирования этого устройства. В этой конфигурации при приложении электрического поля к электродам пряди ЭАП будут укорачиваться. Эта конфигурация выполненного из ЭАП привода называется волоконным ЭАП- приводом. Аналогично, слоистую конфигурацию можно разместить в виде набора слоев на той или иной стороне гибкой пластины или просто слоями из него самого, чтобы повысить его возможности. Типичные волоконные структуры обладают действительной относительной деформацией около 2-4%, и типичный слоистый вариант достигает 20-30%, используя гораздо более высокое напряжение.
Согласно Фиг.2: слоистый ЭАП-композит 100 состоит из слоя 1302 положительного плоского электрода, прикрепленного к ЭАП-слою 104, который в свою очередь прикреплен к слою ионной ячейки 106, который в свою очередь прикреплен к слою отрицательного плоского электрода 108. Согласно Фиг.3: множество из пяти слоистых ЭАП-композитов 100 можно прикрепить друг к другу клеящими слоями 110 между ними, и таким образом будет создан привод 120 в виде ЭАП-пластины. Нужно отметить, что можно сформировать противоположно действующие приводы 120 из ЭАП, которые будут избирательно сгибаться в обоих направлениях. Например, слоистый ЭАП-композит 100 можно приводить в действие по-разному, в результате чего слои на одной стороне будут либо расширяться, либо сокращаться - в зависимости от конфигурации ЭАП, тем самым осуществляя сгиб относительно незадействованного слоя. Еще один пример: такая не являющаяся ЭАП основа, как пружинная сталь, смола или полимер, прикреплена к слоистому ЭАП-композиту 100. При этом слоистый ЭАП-композит 100, выполненный с возможностью его удлинения, будет обусловливать сгиб не являющейся ЭАП основы в сторону от слоистого ЭАП-композита 100. Слоистый ЭАП-композит 100, выполненный с возможностью его сокращения, будет обусловливать сгиб не являющейся ЭАП основы к слоистому ЭАП-композиту. Не являющуюся ЭАП основу, имеющую на обеих сторонах слоистый ЭАП-композит 100, можно использовать, чтобы выполнять разный сгиб в обе стороны.
Согласно Фиг.4-5: сокращающийся выполненный из ЭАП волоконный привод 140 содержит продольный платиновый катодный провод 142, который проходит через изолирующий полимерный ближний концевой колпачок 144 через удлиненную цилиндрическую полость 146, сформированную в пластмассовой цилиндрической стенке 148, имеющей проводящую присадку, чтобы действовать как положительный анод. Дистальный конец платинового катодного провода 142 встроен в изолирующий полимерный дистальный концевой колпачок 150. Множество сокращающихся полимерных волокон 152 установлены параллельно катодному проводу 142 и вокруг него, и их концы встроены в соответствующие концевые колпачки 144, 150. Пластмассовая цилиндрическая стенка 148 по периметру прикреплена вокруг соответствующих концевых колпачков 144, 150 и заключает в себе цилиндрическую полость 146, герметизируя ионную текучую среду или гель 154, которые заполняют пространство между сокращающимися полимерными волокнами 152 и катодным проводом 142. При приложении напряжения к пластмассовой цилиндрической стенке (аноду) 148 и к катодному проводу 142 ионная текучая среда поступает в сокращающиеся полимерные волокна 152, расширяя их наружный диаметр с соответствующим сокращением длины, тем самым придвигая концевые колпачки 144, 150 друг к другу.
Шарнирное соединение, приводимое в действие электроактивным полимером
Согласно Фиг.6-13: хирургический инструмент 200 для наложения скобок и разрезания содержит приводимое в действие с помощью ЭАП шарнирное соединение 202, сформированное в его удлиненном валу 204 вблизи концевого рабочего органа, иллюстрируемое хирургическим узлом 12, наложения скобок и разрезания, который предпочтительно реагирует на отдельные закрывающие и запускающие движения, передаваемые в продольном направлении удлиненным валом 204. Приводимое в действие с помощью ЭАП шарнирное соединение 202 повышает нужную клиническую гибкость шарнирного вращения узла 12 наложения скобок.
Согласно варианту, поясняемому чертежами Фиг.6-13: приводимое в действие с помощью ЭАП шарнирное соединение 202 является, в более определенном смысле, гибким закрывающим и поворотным шарнирным соединением 210 каркаса, которое согласно Фиг.6 включает в себя гибкий узел 212 закрывающей гильзы, содержащий проксимальную закрывающую трубку 214 и дистальное закрывающее кольцо 216, соединенные гибкой закрывающей трубкой 218. Левый и правый продольные ряды вертикальных щелей 220, 222 на гибкой закрывающей трубке 218 обеспечивают возможность изгиба вправо и влево для шарнирного вращения, и непрерывная верхняя продольная полоса 224 передает продольное закрывающее движение, независимо от степени этой гибкости. Нужно отметить, что такая же непрерывная нижняя продольная полоса проходит снизу гибкой закрывающей трубки 218 (не показана), и она противоположна верхней продольной полосе 224 и взаимодействует с ней в передаче этого движения. В частности, верхняя часть дистального закрывающего кольца 216 содержит подковообразное отверстие 226, которое находится в зацеплении со средством 228 закрывания упора 22. Согласно Фиг.7: упор 22 содержит выступающие в поперечном направлении поворотные штифты 230 на его проксимальном конце, которые с возможностью поворота зацепляют поворотные отверстия 232, сформированные рядом с проксимальным концом удлиненного желоба 18 (Фиг.7-8). Несколько более дистальное средство 228 закрывания упора таким образом создает закрывающее движение, когда узел 212 гибкой закрывающей гильзы перемешается к дистальному концу и создает открывающее движение при его перемещении в направлении проксимального конца. Гибкая закрывающая трубка 218, выполняя шарнирный поворот, может сгибаться по длине левого и правого продольных рядов вертикальных щелей 220, 222, тем самым вмещая охватываемый одиночный шарнирный узел 234 каркаса гибкого закрывающего и поворотного шарнирного соединения 210 каркаса при выполнении шарнирного поворота.
Обращаясь к Фиг.7-9: одиночный шарнирный узел 234 каркаса содержит проксимальное основание 236 каркаса, имеющее выступающие в сторону дистального конца верхний и нижний поворотные выступы 238, 240, каждый из которых имеет соответствующее верхнее и нижнее отверстие 242, 244 поворотного штифта. Соответствующие верхний и нижний поворотные хвостовики 246, 248, выступающие в сторону проксимального конца из дистального основания 250 каркаса, причем каждый хвостовик 246, 248 содержит соответствующие верхнее и нижнее отверстия 252, 254 поворотного штифта, с возможностью поворота входят в зацепление с проксимальным основанием 236 каркаса. В частности, вертикально выровненные верхние отверстия 242, 252 поворотного штифта и нижние отверстия 244, 254 поворотного штифта соответственно находятся в зацеплении с верхним и нижним поворотными штифтами 256, 258 (Фиг.10).
Согласно Фиг.8: исполнительная часть 260 хирургического инструмента 200, сформированная удлиненным валом 16 и узлом 12 наложения скобок, также содержит стержень запуска 270, в продольном направлении поступательно перемещающийся по проксимальному основанию 218 каркаса, через гибкое закрывающее и поворотное шарнирное соединение 210 каркаса и через прорезь 272 запуска в дистальном основании 250 каркаса в узел 12 наложения скобок. Дистальное и проксимальное квадратные отверстия 274, 276, сформированные сверху дистального основания 250 каркаса образуют стержень зажима 278 между ними, который принимает верхний рычаг 280 зажимной пружины 282, нижний проходящий в направлении дистального конца рычаг 284 которой оказывает направленное вниз давление на приподнятую часть 286 вдоль верхней части стержня запуска 270, которая соответствует блокирующей - в случае пустого картриджа или в случае отсутствия картриджа - части хода запуска.
Обращаясь к Фиг.8: выступающий в направлении дистального конца стержень запуска 270 прикреплен к Е-образному элементу 288, который отделяет промежутком упор 22 от картриджа скобок 20, разрезает ткань и приводит в действие картридж скобок 20. Картридж 20 скобок содержит формованный корпус 290 картриджа и содержит множество скобок, расположенных на толкателях 292 скобок в соответствующих открытых вверх отверстиях 294 для скобок. Клиновидный ползун 296 выталкивается в направлении дистального конца Е-образным элементом 28 21`8, скользящим по лотку 298 картриджа, который удерживает вместе различные компоненты сменного картриджа скобок 20. Клиновидный ползун 296 приподнимает толкатели 292 скобок и выводит скобки в деформирующий контакт с упором 22, и при этом режущая поверхность 300 Е-образного элемента 288 рассекает зажатую ткань. Нужно отметить, что верхние штифты 302 Е-образного элемента 288 находятся в зацеплении с упором 22 во время запуска, и при этом средние штифты 304 и нижнее основание 306 находятся в зацеплении с соответствующими верхней и нижней поверхностями продольной прорези 308, сформированной в удлиненном желобе 18, соответствующим продольным отверстием 310 в лотке 298 картриджа и открытой в заднем направлении вертикальной прорезью 312 в корпусе 290 картриджа. Затем стержень запуска 270 отводится в направлении ближнего конца и также отводит Е-образный элемент 288, позволяя тем самым открыть упор 22, чтобы высвободить две сшитые скобками и рассеченные части ткани (не показано).
Узел 12 наложения скобок более подробно описывается в находящейся на совместном рассмотрении патентной заявке США этого же владельца № 10/955,042 на “Articulating Surgical Stapling Instrument Incоrporating a Two-Piece E-Beam Firing Mechanism”, Frederick E. Shelton IV, et al.,, поданной 30 сентября 2004 г., содержание которой полностью входит в данный документ в качестве ссылки.
Обращаясь к Фиг.9-13: выполненная из ЭАП приводная система 400 приводит в действие одиночный шарнирный узел 234 каркаса, срабатывая на электрический сигнал (не показан) выполнения шарнирного поворота, принимаемый от рукоятки 14. Согласно поясняемому варианту в соответствии с Фиг.7-13: верхний левый и верхний правый волоконные ЭАП-приводы 402, 404 прикреплены горизонтально к каждой боковой стороне верхнего выступающего в дистальном направлении рычага 406 момента, прикрепленного к верхнему поворотному выступу 238. Наружные концы верхних левого и верхнего правого волоконных ЭАП-приводов 402, 404 прикреплены к соответствующим верхним левой и правой боковым точкам 406, 408 прикрепления внутреннего диаметра 410 проксимального основания 250 каркаса. Аналогично нижние левый и нижний правый волоконные ЭАП-приводы 412, 414 прикреплены горизонтально к каждой боковой стороне нижнего выступающего в дистальном направлении рычага 416 момента, прикрепленного к верхнему поворотному выступу 238. Внешние концы нижних левого и нижнего правого волоконных ЭАП-приводов 412, 414 прикреплены к соответствующим нижним левой и правой боковой точкам 418, 420 прикрепления внутреннего диаметра 410 дистального основания 250 каркаса. Точки 406, 408, 418, 420 прикрепления проходят через дистальное основание 250 каркаса, согласно Фиг.12; левые точки 406, 418 прикрепления показаны снаружи дистального основания 250 каркаса - Фиг.9. Действие одной пары ЭАП-приводов, такой как на Фиг.13, и, в частности, верхнего и нижнего правых волоконных ЭАП-приводов 404, 414, вызывает их сокращение, перемещение верхнего и нижнего рычагов 406, 416 момента в правую сторону дистального основания 250 каркаса, тем самым растягивая верхний и нижний волоконные ЭАП-приводы 402, 412; при этом левый продольный ряд вертикальных щелей 220 сжимается, и правый продольный ряд вертикальных щелей 222 расширяется.
Согласно Фиг.14-18: хирургический инструмент 500 для наложения скобок и разрезания содержит альтернативное действующее при помощи ЭАП шарнирное соединение 502, содержащее двойной шарнирный узел 504 закрывающей гильзы (Фиг.14-15) и одиночный шарнирный узел 506 каркаса (Фиг.15-18). Согласно Фиг.14: узел 12 наложения скобок показан без сменного картриджа скобок 20 и с открытым упором 22. Двойной шарнирный узел 504 закрывающей гильзы находится в своем проксимальном положении, при этом его дистальная поворотная ось сцентрирована с поворотной осью узла 506 каркаса. Нужно отметить, что когда узел 504 закрывающей гильзы перемещается в направлении к дистальному концу, чтобы закрыть упор 22, проксимальная поворотная ось узла 504 закрывающей гильзы также поворачивается, чтобы пройти над шарнирным узлом 506 каркаса.
Обращаясь к Фиг.15: двойной шарнирный узел 504 закрывающей гильзы содержит проксимальную закрывающую трубку 510, дистальный конец которой прикреплен к проксимальному закрывающему кольцу 512, имеющему верхний и нижний выступающие в направлении дистального конца хвостовики 514, 516. Дистальная закрывающая трубка 518, которая содержит подковообразное отверстие 520 для зацепления закрывающего упор средства 228 на упоре 22, со стороны проксимального конца соединена с штифтом дистальным закрывающим кольцом 522, имеющим верхний и нижний выступающие в направлении проксимального конца хвостовики 524, 526. Верхняя двойная поворотная связь 528 содержит выступающие вверх дистальный и проксимальный поворотные штифты 530, 532, которые находятся в зацеплении, соответственно, с верхним дистальным штифтовым отверстием 534 в верхнем выступающем в проксимальном направлении хвостовике 514. Нижняя двойная поворотная связь 538 содержит выступающие в нижнем направлении дистальный и проксимальный поворотные штифты 540, 542, которые находятся в зацеплении, соответственно, с нижним дистальным штифтовым отверстием 544 в нижнем выступающем в проксимальном направлении хвостовике 526 и с нижним проксимальным штифтовым отверстием 546 в нижнем выступающем в дистальном направлении хвостовике 516.
Обращаясь к Фиг.15-18: одиночный шарнирный узел 506 каркаса содержит проксимальное основание 550 каркаса, дистальный конец которого содержит поворотное штифтовое отверстие 552, сцентрированное и проксимальное по отношению к дистально открытому поворотному углублению 554, образованному между левым и правым рычагами 556, 558 момента. Соединительный элемент 560 по форме аналогичный собачьей кости, имеет проксимальный штифт 562, который в верхнем направлении входит в зацепление с поворотным штифтовым отверстием 552 в проксимальном основании 550 каркаса, и перекладину 564, которая поворачивается между левым и правым рычагами 556, 558 момента. Дистальный штифт 566 соединительного элемента 560 жестко прикреплен к нижней проксимальной проточке 568 в дистальном основании 570 каркаса, имеющем дистальные боковые направляющие 572, которые зацепляют проксимальные направляющие 574 в удлиненном желобе 18.
Исполнительная ЭАП-система 580 имеет левый и правый пакетированные ЭАП-исполнительные механизмы 582, 584, которые избирательно расширяются и оказывают шарнирное усилие на перекладину 564 соединительного элемента 560, которая пассивно сжимает другой пакетированный ЭАП-исполнительный механизм. Согласно Фиг.18: правый пакетированный ЭАП-исполнительный механизм 582 расширился и поворачивает соединительный элемент 560 и, вследствие этого, узел 12 наложения скобок влево, и пассивно сжимает левый пакетированный ЭАП-исполнительный механизм 584.
Согласно Фиг.19: еще одно альтернативное действующее при помощи ЭАП шарнирное соединение 600 для хирургического инструмента 602 содержит одиночный шарнирный каркасный узел 604, в котором проксимальное основание 606 каркаса зацепляет выступающий в направлении дистального конца хвостовик 608 дистального основания 610 каркаса поворотным штифтом 612. Выступающий в направлении дистального конца хвостовик 608 углублен на правой боковой стороне и образует полуовальный шкив 614 на правой стороне поворотного штифта 612. К дистальной точке полуовального шкива 614 прикреплен дистальный конец сокращающегося волоконного ЭАП-привода 616, который повторяет его контур и проходит в проксимальное основание 606 каркаса. Сокращающийся волоконный ЭАП-привод 616 может быть достаточно длинным, чтобы - даже при небольшом относительном сокращении по длине - можно было обеспечить значительный поворот. Нужно отметить, что механизм противоположного вращения можно предусмотреть на левой стороне упомянутого хвостовика 608 на аналогичном, но обратного действия, механизме, сформированном на другой стороне ЭАП-шарнирного соединения 600.
Механизм блокирования шарнирного вращения для поворотного шарнирного механизма
Согласно Фиг.20-27: действующий от ЭАП механизм 700 блокирования шарнирного вращения включен в состав поворотного шарнирного соединения 702 для хирургического инструмента 704. Для ясности одиночный шарнирный узел 702 каркаса показан с проксимальным основанием 708 каркаса, имеющим выступающие в дистальном направлении верхний и нижний поворотные выступы 710, 712, которые с возможностью поворота зацепляют направленные к проксимальному концу верхний и нижний хвостовики 714, 716 дистального основания 718 каркаса, который прикреплен к концевому рабочему органу 720. Верхнее внутреннее отверстие 722 в верхнем поворотном выступе 710 сцентрировано под верхним внешним отверстием 724 в верхнем хвостовике 714, которые с возможностью поворота соединены верхним поворотным штифтом 726. Нижнее внутреннее отверстие 728 в нижнем поворотном выступе 712 сцентрировано над нижним внешним отверстием 730 в нижнем хвостовике 716. Отверстия 728, 712 с возможностью поворота соединены нижним поворотным штифтом 732. Верхний и нижний рычаги 734, 736 момента проходят в направлении к дистальному концу от верхнего и нижнего поворотных выступов 710, 712. Верхний рычаг 734 момента можно принудительно отвести влево к верхней левой точке 738 прикрепления, сформированной в дистальном основании 718 каркаса по существу горизонтальным верхним левым волоконным ЭАП-приводом механизмом 740. Верхний рычаг 734 момента можно принудительно отвести вправо к верхней правой точке 742 прикрепления, сформированной в дистальном основании 718 каркаса, с помощью по существу горизонтального верхнего правого волоконного ЭАП-привода 744. Нижний рычаг 736 момента можно принудительно отвести влево к нижней левой точке 746 прикрепления, сформированной в дистальном основании 718 каркаса, по существу горизонтальным нижним левым волоконным ЭАП-приводом 748. Нижний рычаг 736 момента можно принудительно отвести вправо к нижней правой точке 750 прикрепления, сформированной в дистальном основании 718 каркаса, по существу горизонтальным волоконным ЭАП-приводом 752.
Закрывание упора 22 можно осуществить действием закрывающего механизма (не показан), такого как ЭАП-привод, воздействующий на шарнир упора. Либо движение запуска может сначала закрыть упор перед последующим движением наложения скобок и разрезания. Еще одна альтернатива: узел закрывающей гильзы или другой продольно соединенный механизм (не показан) может придать закрывающее движение упору 22.
Верхний ЭАП-механизм 800 блокирования шарнирного вращения предпочтительно разблокирует поворотное шарнирное соединение 702, чтобы разрешить шарнирное перемещение. Приводимый в действие при помощи ЭАП механизм 800 блокирования шарнирного вращения затем прейдет в заблокированное состояние, гарантируя стабильное заблокированное положение, для которого не требуется рассеяние мощности и поэтому - нагревания компонентов между изменениями величины шарнирного поворота. Узел 802 верхнего блокирующего болта имеет прямоугольное верхнее блокирующее углубление 804, сформированное в проксимальном основании 708 каркаса, который ближе к продольной геометрической оси и вертикально от нее дальше, чем верхний поворотный выступ 710. От блокирующего болта 806 отходит блокирующий наконечник 808, выступающий из дистальной прорези 810, сформированной в верхнем блокирующем углублении 804, входящий в зацепление с ближайшим основанием 812 зубца зубчатого сегмента 814, сформированного вокруг проксимальной поверхности верхнего поворотного хвостовика 714 дистального основания 718 каркаса. Блокирующий болт 806 в направлении к проксимальному концу оканчивается поперечной пластиной 816, которая скользит в продольном направлении в прямоугольном верхнем блокирующем углублении 804 между принудительным перемещением проксимально установленной пружины 818 сжатия и верхними левым и правым пакетированными ЭАП-приводами 820, 822, которые могут быть активированы для расширения в продольном направлении, сжимая пружину сжатия 818 так, что блокирующий болт 806 перемещается проксимально, тем самым отсоединяя блокирующий наконечник 808 от зубчатого сегмента 814, позволяя повторное позиционирование поворотного шарнирного соединения 702. Верхняя блокирующая крышка 824 закрывает верхнее блокирующее углубление 804.
Для дополнительного блокирования, согласно Фиг.23, нижний действующий от ЭАП механизм 830 блокирования шарнирного вращения, который идентичен верхнему блокирующему механизму 800, воздействует на противоположную сторону в упор нижнему поворотному хвостовику 716. Нужно также отметить, что аналогичный блокирующий механизм можно включить в дистальную часть удлиненного вала, а не в проксимальный конец. Помимо этого, двойная поворотная связь может содержать блокировку на каждом шарнире.
В работе: концевой рабочий орган 720 в положении без поворота и поворотное шарнирное соединение 702 (Фиг.20-24) вставлены в место проведения хирургической операции. Когда ЭАП-блокирующие механизмы 800, 830 обычно не запитаны, блокирующий наконечник 808, прикрепленный к проксимальному основанию 708 каркаса, входит в зацепление с зубчатым сегментом 814 дистального основания 718 каркаса, блокируя одиночный поворотный узел 706 каркаса. При необходимости пакетированные ЭАП-приводы 820, 822 запитываются и удлиняются в продольном направлении, при этом выводя из блокированного состояния ЭАП-механизмы 800 блокирования шарнирного вращения. Когда оно находится в разблокированном состоянии, шарнирное соединение 702 может выполнять шарнирные повороты, например, путем сокращения верхнего и нижнего правых волоконных ЭАП-приводов 744, 752, чтобы повернуть концевой рабочий орган 720 влево (Фиг.25), перемещая другое основание 812 зуба к блокирующему наконечнику 808, и поэтому, когда он не запитан, ЭАП-механизм 800 блокирования шарнирного вращения будет блокировать шарнирное состояние хирургического инструмента 704.
Фиг.28-29 показывают альтернативную систему 900 ЭАП-шарнирного вращения для одиночного поворотного шарнирного соединения 901, используемого с поясняемым выше ЭАП-механизмом 800 блокирования шарнирного вращения. Верхняя и нижняя пары левого и правого волоконных ЭАП-приводов 902, 904, 906, 908 удлинены за счет включения в них верхнего и нижнего скругленных рычагов 910, 912 в направлении к дальнему концу соответственно на верхнем и нижнем поворотных выступах 914, 916 проксимального основания 918 каркаса. Верхняя левая точка 920 прикрепления в дистальном основании 922 каркаса несколько выше верхней правой точки 924 прикрепления. Нижняя левая точка прикрепления 926 также несколько выше нижней правой точки 928 прикрепления, соответствующей верхнему и нижнему левым волоконным ЭАП-приводам 902, 906, которые обернуты соответственно вокруг более высокой части соответствующих верхнего и нижнего скругленных рычагов 910, 912 момента, чем верхний и нижний правые волоконные ЭАП-приводы 904, 908 (Фиг.29). При этом удлиненные волоконные ЭАП-приводы 902-908 в комбинации с длиной и контуром рычагов 910, 912 момента могут быть выбраны сообразно нужным рабочим характеристикам.
Согласно Фиг.30-33 дополнительная альтернативная ЭАП-система 1000 шарнирного вращения для одиночного поворотного шарнирного соединения 1001 используется совместно с описываемым выше ЭАП-механизмом 800 блокирования шарнирного вращения. Вместо выполняющих шарнирный поворот волоконных ЭАП-приводов верхняя и нижняя пары левых и правых пакетированных ЭАП-приводов 1002, 1004, 1006, 1008 соответственно находятся напротив, и в поперечном направлении перемещают верхнюю и нижнюю продольные направляющие 1010, 1012. Выступающий в направлении проксимального конца верхний рычаг 1014 момента прикреплен к верхнему поворотному выступу 1016 проксимального основания 1018 каркаса. Верхний направленный внутрь концевой штырь 1020 на дистальном конце верхнего рычага 1014 момента в продольном направлении за счет скольжения входит в зацепление с верхней продольной направляющей 1010 и, таким образом, реагирует на разное сокращение и расширение верхних левого и правого пакетированных ЭАП-приводов 1002, 1004, которые в поперечном направлении ограничены дистальным основанием 1022 каркаса. Выступающий в дистальном направлении нижний рычаг 1024 момента прикреплен к верхнему поворотному выступу 1026 проксимального основания 1018 каркаса. Нижний направленный внутрь концевой штырь 1030 на дистальном конце верхнего рычага 1024 момента за счет продольного скольжения входит в зацепление с нижней продольной направляющей 1012 и тем самым реагирует на разное сокращение и расширение нижних левого и правого пакетированных ЭАП-приводов 1006, 1008, которые в поперечном направлении ограничены дистальным основанием 1022 каркаса.
Обращаясь к Фиг.30-31: ЭАП-механизм 800 блокирования шарнирного вращения отсоединяет блокирующий наконечник 808 от зубчатого сегмента 814 при подготовке к шарнирному повороту. Согласно Фиг.32-33 верхний и нижний левые пакетированные ЭАП-приводы 1002, 1006 задействованы на расширение и в поперечном направлении перемещают вправо верхнюю и нижнюю продольные направляющие 1010, 1012, тем самым сжимая верхний и нижний пакетированные ЭАП-приводы 1004, 1008 и перемещая дистальное основание 1022 каркаса, соответственно преодолевая противодействующее усилие от верхнего и нижнего направленных внутрь концевых штырей 1020, 1030; в этом поясняемом шарнирном перемещении влево.
Хирургический инструмент с шарнирным соединением с гибкой шейкой, приводимым в действие электроактивным полимером
Обращаясь к Фиг.34: хирургический инструмент 1200 предпочтительно содержит действующее при помощи ЭАП шарнирное соединение 1202, которое выполнено заодно с шарнирным узлом 1204 каркаса удлиненного вала 1206, который передает отдельные движения закрывания и запуска от рукоятки 1208 в концевой рабочий орган 1210, представляющий собой узел 1212 наложения скобок, имеющий закрываемый упор 1214, который с возможностью поворота прикреплен к удлиненному желобу 1216, в который помещен сменный картридж скобок 1218. Рукоятка 1208 содержит закрывающий курок 1220, который нажимают в сторону проксимального конца к пистолетной рукоятке 1222, чтобы осуществить закрывание упора 1214. Необходимо отметить, что узел 1223 закрывающей гильзы или другое, не показанное, закрывающее средство (напр., приводимый в действие от ЭАП упор, внутренний поступательно перемещающийся в продольном направлении элемент и пр.), которое не показано, действует на средство 1224 закрывания упора для выполнения открывания и закрывания упора 1214. После закрывания и зажатия на более дистальный запускающий курок 1226 нажимают в сторону пистолетной рукоятки 1222 для запуска запускающего элемента 1228 продольно по удлиненному валу 1206, чтобы выполнить разрезание ткани и наложение скобок на рассеченные концы. После того как запускающий курок 1226 будет отпущен, вместе с легким нажатием закрывающего курка 1220 нажимается кнопка 1230 высвобождения закрывания, чтобы высвободить зажимающие компоненты, после чего закрывающий курок 1220 отпускают, чтобы открыть упор 1214 и чтобы высвободилась сшитая скобками и рассеченная ткань. Поворотная ручка 1232 обеспечивает возможность избирательного поворота вокруг продольной оси удлиненного вала 1206.
Шарнирный узел 1204 каркаса содержит проксимальное основание 1240 каркаса, которое со стороны проксимального конца и с возможностью поворота прикреплено к рукоятке 1208, и дистально прикреплено к шарнирному основанию 1242 каркаса, который в свою очередь прикреплен к дистальному основанию 1244 каркаса, на котором установлен концевой рабочий орган 1210. Средство 1246 управления шарнирным вращением на рукоятке 1208 позволяет выбирать шарнирное вращение основания 1242 каркаса путем формирования соответствующих сигналов для него - согласно Фиг.35, где шарнирный поворот влево выбран средством 1246 управления шарнирным вращением. Нужно отметить, что средство управления 1246 шарнирным вращением может также целесообразным образом предусматривать ручное и/или автоматическое отсоединение блокировки шарнирного вращения для шарнирного основания 1242 каркаса.
Согласно Фиг.36-39 шарнирное основание 1242 каркаса содержит ЭАП-приводную систему 1300, которая использует левый и правый приводы 1302, 1304 в виде ЭАП-пластин, проходящие через соответствующие левый и прямоугольный вырезы 1306, 1308 приводов (Фиг.38-39) на каждой боковой стороне по существу цилиндрического упругого корпуса 1310 каркаса. Прямоугольная ножевая прорезь 1312 в упругом корпусе 1310 каркаса сцентрирована между левым и правым прямоугольными вырезами 1306, 1308 приводов для направления стержня запуска 1314, являющегося дистальной частью запускающего элемента 1228.
Сплошные верхняя и нижняя продольные полосы 1320 (Фиг.36-37) упругого корпуса 1310 каркаса обеспечивают продольный участок хода для стержня запуска 1314, когда шарнирное основание 1342 каркаса либо прямое, либо повернуто шарнирно. Упругий корпус 1310 каркаса предпочтительно выполнен из однородного материала, который не сжимается значительно вдоль его продольной оси. Левое и правое множества продольно сцентрированных вертикальных углублений 1322, 1324 пересекают, соответственно, левый и правый вырез 1306, 1308 ЭАП-приводов. Каждое вертикальное углубление 1322, 1324 содержит прямоугольное сквозное отверстие 1326, которое проходит сверху вниз через упругий корпус 1310 каркаса параллельно и с латеральным смещением и от прямоугольной ножевой прорези 1312, и от соответствующего одного либо левого, либо правого прямоугольного выреза 1306, 1308 приводов. Каждое прямоугольное сквозное отверстие 1326 сообщается в поперечном направлении с суженным поперечным зазором 1328. Прилегающие вертикальные углубления 1322, 1324 между собой ограничивают ребро 1330, которое имеет: узкую внутреннюю стенку 1332, которая обеспечивает возможность поперечного сгиба непрерывных верхней и нижней продольных полос 1320, и более толстый искривленный внешний сегмент 1334, на который опирается соответствующий один из приводов 1302, 1304 в виде ЭАП-пластины и который ограничивает степень шарнирного поворота, которую можно обеспечить в этом направлении до того, как суженные поперечные зазоры 1328 полностью сомкнутся, когда один или оба работающих от приводов 1302, 1304 в виде ЭАП-пластины будут приведены в действие и согнутся в заданном направлении. Согласно Фиг.37, например, левый привод 1302 в виде ЭАП-пластины действует влево, и при этом привод 1304 в виде ЭАП-пластины растягивается, реагируя на это действие. Нужно отметить, что левый и правый приводы 1302, 1304 в виде ЭАП могут попеременно сокращаться или расширяться, когда они электрически активированы, чтобы создавать выталкивающее или толкающее усилие, соответственно, в левом и правом прямоугольных вырезах 1306, 1308 приводов.
В соответствии с Фиг.38-39: шарнирное основание 1242 каркаса предпочтительно содержит ЭАП-механизм 1350 блокирования шарнирного вращения, который избирательно удерживает упругий корпус 1310 каркаса в шарнирно повернутом влево или в шарнирно повернутом вправо состоянии. Для этого левый блокирующий проход 1352 проходит через левое множество прямоугольных сквозных отверстий 1326 вблизи их крайне левой внешней части, чтобы левая гребенчатая блокирующая ЭАП-полоса 1354 проходила по нему. Аналогично правый блокирующий проход 1356 проходит через правое множество прямоугольных сквозных отверстий 1326 вблизи их крайне правой внешней части, чтобы обеспечивалось место для правой гребенчатой блокирующей ЭАП-полосы 1358. На своей соответствующей верхней поверхности 1360 обеих левой и правой гребенчатых блокирующих ЭАП-полос 1354, 1358 множество отделенных продольным интервалом вертикальных блокирующих гребней 1362 расположены с интервалом в продольном направлении, и их размер, вместе с геометрией ребер 1330, обеспечивает блокировку при нужной степени шарнирного поворота. В частности, когда гибкое основание 1242 каркаса шарнирно поворачивается к противоположной стороне соответствующей гребенчатой блокирующей ЭАП-полосы 1354, 1358, то ребра на этой стороне дугообразно поворачиваются друг от друга, согласно Фиг.38, шарнирно поворачиваясь влево. После того как ребра 1330 достигнут достаточного интервала для блокирования (т.е. шире продольной ширины вертикальных блокирующих гребней 1362, то правая гребенчатая блокирующая ЭАП-полоса 1358 смещается в наружном направлении и защелкивается своими гребнями 1362 между соседними утолщенными, искривленными внешними сегментами 1334 соседних ребер 1330. Когда правая гребенчатая блокирующая ЭАП-полоса 1358 приводится в действие, она обусловливает сокращение, которое разблокирует правую гребенчатую блокирующую ЭАП-полосу 1358. Согласно Фиг.39: боковые верхний и нижние направляющие штифты 1370, 1372, которые проходят над и под прямоугольной ножевой прорезью 1312, сохраняют поперечное центрирование.
В соответствии с Фиг.40: участок шарнирное основание 1242 каркаса содержит приводную ЭАП-систему 1400, которая использует множество левых и правых расширяющих ребра пластинчатых ЭАП-приводов 1402, каждый из которых расположен между противоположной парой с дистальной и проксимальной сторон открытых прямоугольных вырезов упругого корпуса 1408 каркаса. Каждая противоположная пара на дистальной и проксимальной сторонах открытых прямоугольных вырезов 1404, 1406 привода соответственно сформирована в прилегающей паре (проксимальной/дистальной) поперечных ребер 1410. Каждое ребро 1410 содержит вертикальную прорезь 1412, которая открыта в наружном поперечном направлении вдоль ее высоты, при этом более широкое прямоугольное сквозное отверстие 1414, расположено в большей степени внутри и сужается в сторону внешней вертикальной прорези 1416. Причем каждое ребро 1410 содержит тонкую внутреннюю стенку 1418, которая соединяется с верхней и нижней продольными непрерывными полосами 1420. Прямоугольная ножевая прорезь 1422 сформирована латерально вдоль геометрической оси. Левая и правая гребенчатые блокирующие ЭАП-полосы 1354, 1358, как упомянуто выше, предпочтительно переходят в расширенную искривленную форму на расширенной стороне шарнирного основания 1242 каркаса для выполнения блокирования, при этом продольное центрирование обеспечивается поперечными направляющими штифтами 1370.
В соответствии с Фиг.41-42 шарнирное основание 1242 каркаса также содержит еще одну альтернативную ЭАП-приводную систему 1500 в упругом корпусе 1502 каркаса, которая содержит продольно центрированные волоконные ЭАП-приводы 1504, расположенные в левом и правом вертикальных ярусах 1506, 1508, которые проходят через, соответственно, правое и левое множества поперечных ребер 1510, при этом каждая имеет тонкую внутреннюю вертикальную стенку 1512, которая соединяется с непрерывными продольными верхней и нижней полосами 1514, чтобы облегчить их поперечный изгиб. Каждое ребро 1510 расширяется в поперечном направлении к толстому внешнему сегменту 1516, размер которого ограничивает шарнирный поворот в эту сторону. Каждый толстый внешний сегмент 1516 имеет вертикалью расположенное продольное сквозное отверстие 1518, через которое проходят волоконные ЭАП-приводы 1504. Дистальные и проксимальные поперечные крышки 1520, 1522 продольно примыкают к ребрам 1510 и закрывают соответствующие окончания волоконных ЭАП-приводов 1504. Латерально сцентрированная ножевая прорезь 1524 сформирована в упругом корпусе 1502 рамы для стержня запуска 1314. Сокращение выбранного вертикального яруса 1506, 1508 волоконных ЭАП-приводов 1504 обусловливает шарнирный поворот в эту сторону, причем не приведенный в действие вертикальный ярус 1506, 1508 пассивно удлиняется, реагируя на это сокращение.
Опорные ЭАП-пластины для стержня запуска
Обращаясь к Фиг.43-54: поперечная симметрия преобладает в разных вариантах пар опорных пластин, на которые опирается стержень запуска в шарнирном соединении. Помимо этого предполагается, что устройства в соответствии с настоящим изобретением могут содержать либо проксимальный, либо дистальный конец поясняемого шарнирного соединения для устройств, не являющихся продольно симметричными. Таким образом обозначение одного поперечно симметричного компонента с приставкой «а» и обозначение зеркального компонента приставкой “b” не означают один из левого или правого компонентов.
Согласно Фиг.43: шарнирное соединение 2000 для хирургического инструмента 2002 содержит пару опорных ЭАП-пластин 2004, 2006, на которые в поперечном направлении опирается стержень запуска 2008, чтобы свести к минимуму заедание и изгиб шарнирного поворота. Каждая опорная пластина 2004, 2006 имеет соответствующий конструкционный элемент 2010а, 2010b (напр., жесткий полимер, металл), имеющий поперечно расширенный конец 2012а, 2012b в имеющем соответствующий размер углублении 2014а, 2014b в первом основании 2016 каркаса, и прямой конец 2018а, 2018b, который за счет скольжения входит во второе основание 2020 каркаса. Продольно расширяющийся слоистый ЭАП 2022а, 2022b закрывает внутреннюю поверхность каждой опорной пластины 2004, 2006.
Согласно Фиг.44 шарнирное соединение 2000 делает шарнирный поворот в одну боковую сторону, в результате чего стержень запуска 2008 проходит далее шарнирной продольной оси 2024 и входит в контакт с опорной пластиной 2006. Обеспечиваемая ею боковая опора предотвращает выталкивание стержня запуска 2008 из шарнирного соединения 2000, и/или позволяет изготовление более гибкого стержня запуска 2008, с меньшим усилием для осуществления шарнирного поворота. Помимо этого, слоистый ЭАП 2022а, 2022b на каждой опорной пластине 2004, 2006 приводится в действие при необходимости регулирования степени кривизны обеих, чтобы сохранять нужный интервал между ними для стержня запуска 2008. Прямые концы 2018а, 2018b скользят во втором основании 2020 каркаса сообразно с уменьшенным ходом, нужным для внутренней опорной пластины 2004 по сравнению с внешней опорной пластиной 2006. Слоистый ЭАП 2022b может также обеспечивать амортизацию и низкие фрикционные характеристики поверхности для улучшения латеральному направлению стержня запуска 2008.
В соответствии с Фиг.45 альтернативное шарнирное соединение 2100 для хирургического инструмента 2102 содержит пару опорных ЭАП-пластин 2104, 2106, на которые в поперечном направлении опирается стержень запуска 2108, чтобы свести к минимуму заедание и изгиб во время шарнирного поворота. Каждая опорная пластина 2104, 2106 содержит, соответственно, конструкционный элемент 2110а, 2110b (напр., жесткий полимер, металл), содержащий: расширенный в поперечном направлении конец 2112а, 2112b, захватываемый в имеющем соответствующий размер углублении 2114а, 2114b в первом основании 2116 каркаса, и прямой конец 2118а, 2118b, за счет скольжения входящий во второе основание 2120 каркаса. Продольно расширяющийся слоистый ЭАП 2122а, 2122b закрывает внешнюю поверхность каждой опорной пластины 2104, 2106. Шарнирное соединение 2100 осуществляет шарнирный поворот к одной боковой стороне, обусловливая смещение стержня запуска 2108 далее шарнирной продольной оси 2124 и контактирование с опорной пластиной 2106. Обеспечиваемая ею боковая опора предотвращает ненужное выталкивание стержня запуска 2108 из шарнирного соединения 2100, и/или позволяет изготовление более гибкого стержня запуска 2108, в результате чего снижается требуемое для осуществления шарнирного поворота усилие. Помимо этого слоистый ЭАП 2122а, 2122b на каждой опорной пластине 2104, 2106, соответственно, приводится в действие при необходимости для регулирования степени кривизны обеих, чтобы сохранять нужный интервал между ними для стержня запуска 2108. Прямые концы 2118а, 2118b скользят во втором основании 2120 каркаса сообразно уменьшенному ходу, нужному для внутренней опорной пластины 2104, по сравнению с внешней опорной пластиной 2106. Размещение слоистого ЭАП 2122а, 2122b вне контакта со стержнем запуска 2108 может иметь такие преимущества, как уменьшение износа слоистого ЭАП 2122а, 2122b.
В соответствии с Фиг.46: дополнительное альтернативное шарнирное соединение 2200 для хирургического инструмента 2202 содержит пару опорных ЭАП-пластин 2204, 2206, на которые в поперечном направлении опирается стержень запуска 2208, чтобы свести к минимуму заедание и изгиб во время осуществления шарнирного поворота. Каждая опорная пластина 2204, 2206 содержит соответствующий конструкционный элемент 2210 (напр., металл), который содержит: первый закладной, изогнутый в наружном направлении конец 2212а, 2212b, который ограничен, но в продольном направлении двигается свободно в первом, открытом во внутреннем направлении углублении 2214а, 2214b первого основания 2216 каркаса; и второй закладной, изогнутый в наружном направлении конец 2218а, 2218b, который ограничен, но в продольном направлении свободно двигается во втором открытом во внутреннем направлении углублении 2220а, 2220b второго основания 2222 каркаса. Продольно расширяющийся слоистый ЭАП 2224а, 2224b закрывает внутреннюю поверхность каждой опорной пластины 2204, 2206.
В соответствии с Фиг.47: еще одно дополнительное альтернативное шарнирное соединение 2300 для хирургического инструмента 2302 содержит пару опорных ЭАП-пластин 2304, 2306, на которые в поперечном направлении опирается стержень запуска 2308, чтобы свести к минимуму заедание и изгиб во время осуществления шарнирного поворота. Каждая опорная пластина 2304, 2306 содержит соответствующий конструкционный элемент 2310а, 2310b (напр., металл), который содержит первый закладной, изогнутый в наружном направлении конец 2312а, 2312b, который зафиксирован открытой внутрь прорезью 2314а, 2314b в первом основании 2316 каркаса; и второй закладной, изогнутый в направлении наружу конец 2318а, 2318b, который ограничен и в продольном направлении свободно двигается в открытом в направлении внутрь углублении 2320а, 2320b второго основания 2322 каркаса. Продольно расширяющийся слоистый ЭАП 2324а, 2324b закрывает внутреннюю поверхность каждой опорной пластины 2304, 2306. Пара пружин 2326а, 2328а сжатия в продольном направлении сцентрирована в открытом внутрь углублением 2320а, смещая второй изогнутый наружу закладной конец 2318а опорной пластины 2304 в нейтральное положение в нем. Аналогично пара пружин 2326b, 2328b сжатия продольно сцентрирована в открытом внутрь углублении 2320b, смещая второй изогнутый наружу закладной конец 2318b опорной пластины 2306 в нейтральное положение в нем.
В соответствии с Фиг.48: еще одно альтернативное шарнирное соединение 2400 для хирургического инструмента 2402 содержит пару опорных ЭАП-пластин 2404, 2406, на которые в поперечном направлении опирается стержень запуска 2408, чтобы свести к минимуму заедание и изгиб во время осуществления шарнирного поворота. Каждая опорная пластина 2404, 2406 содержит, соответственно, конструкционный элемент 2410а, 2410b (напр., металл), который содержит: первый закладной, изогнутый наружу конец 2412а, 2412b, который ограничен, но в продольном направлении двигается свободно в первом открытом внутрь углублении 2414а, 2414b в первом основании 2416а, 2416b каркаса; и второй закладной, изогнутый наружу конец 2418а, 2418b, который ограничен и в продольном направлении двигается свободно во втором открытом внутрь углублении 2420а, 2420b второго основания 2422 каркаса. Продольно расширяющийся слоистый ЭАП 2424а, 2424b закрывает внутреннюю поверхность каждой опорной пластины 2404, 2406. Соответствующая пара пружин сжатия 2426а-2428а, 2426b-2428b продольно сцентрирована соответственно в первом открытом внутрь углублении 2412а, 2414b, смещая первый закладной, изогнутый наружу конец 2412а, 2412b каждой опорной пластины 2404, 2406 в нейтральное положение в нем. Еще одна соответствующая пара пружин сжатия 2430а-2432a, 2430b-2432b в продольном направлении сцентрирована во втором открытом внутрь углублении 2420а, 2420b, смещая второй закладной, изогнутый наружу конец 2418а, 2418b каждой опорной пластины 2404, 2406 в нейтральное положение в нем.
В соответствии с Фиг.49-52 еще одно альтернативное шарнирное соединение 2500 для хирургического инструмента 2502 содержит опорные ЭАП-пластины 2504, 2506, которые расположены на каждой боковой стороне стержня запуска 2508 в ножевой прорези 2510 упругого корпуса 2512 шарнирного основания 2514 каркаса, на стороне проксимального конца, соединенного с проксимальным основанием 2516 каркаса, и на дистальной стороне соединенного с дистальным основанием 2518 каркаса. Левый привод 2520 в виде ЭАП-пластины проходит через левое множество поперечных ребер 2522, сформированных в упругом корпусе 2512 каркаса. Правый привод в виде ЭАП-пластины 2524 проходит через правое множество поперечных ребер 2526. Каждый привод 2520, 2524 в виде ЭАП-пластины, проходящий в проксимальном направлении в проксимальном основании 2516 каркаса, содержит, соответственно, внешний слой слоистого ЭАП 2528а, 2528b, прикрепленный к внутренней пластине 2530а, 2530b, и приводится в действие при запитывании электричеством для осуществления сгиба дистального основания 2518 каркаса к другой стороне. Упругий корпус 2512 каркаса содержит открытые внутрь углубления 2532, которые захватывают соответствующие проксимальные искривленные в наружном направлении концы 2534а, 2534b каждой опорной пластины 2504, 2506. Дистальные прямые концы 2536а, 2536b каждой опорной пластины 2504, 2506 выполнены с возможностью выскальзывания из ножевой прорези 2510 в соответствии с изменениями хода для осуществления шарнирного поворота - Фиг.51.
Согласно Фиг.53 показано еще одно альтернативное шарнирное соединение 2600 для хирургического инструмента 2602, которое содержит пару опорных ЭАП-пластин 2604, 2606, на которые в поперечном направлении опирается стержень запуска 2608, чтобы сводить к минимуму заедание и изгиб при осуществлении шарнирного поворота. Каждая опорная пластина 2604, 2606 содержит соответствующий конструкционный элемент 2610 (напр., металл, смола, полимер), имеющий первый закладной, изогнутый наружу конец 2612, зафиксированный соответствующей правой и левой открытой в направлении внутрь прорезью 2614а, 2614b в первом основании 2616 каркаса; и второй закладной, изогнутый наружу конец 2618а, 2618b, который, соответственно, размещен и в продольном направлении свободно помещается в открытом в направлении внутрь углублении 2620а, 2620b второго основания 2622 каркаса.
Внешний расширяющийся в продольном направлении слоистый ЭАП 2624, 2624 установлен во внешней части соответствующего открытого в направлении внутрь углубления напротив второго закладного, изогнутого конца 2618а, 2618b. Внутренний расширяющийся в продольном направлении слоистый ЭАП 2625а, 2625b установлен во внутренней части открытого в направлении внутрь углубления 2620а, 2618b напротив соответствующей противоположной стороны второго закладного, изогнутого наружу конца 2618а, 2618b. Таким образом, приведение в действие одного из внешних расширяющихся в продольном направлении слоистых ЭАП 2624а, 2624b удлиняет соответствующую опорную пластину 2604, 2606. Наоборот, приведение в действие одного из внутренних расширяющихся в продольном направлении слоистых ЭАП 2625а, 2625b уменьшает длину соответствующей опорной пластины 2604, 2606.
В соответствии с Фиг.54 еще одно альтернативное шарнирное соединение 2700 для хирургического инструмента 2702 содержит пару опорных пластин ЭАП 2704, 2706, на которые в поперечном направлении опирается стержень запуска 2708, чтобы свести к минимуму заедание и изгиб во время осуществления шарнирного поворота. Каждая опорная пластина 2704, 2706 содержит соответствующий конструкционный элемент 2710а, 2710b (напр., металл), имеющий первый закладной, изогнутый наружу конец 2712а, 2710b, который размещен, но в продольном направлении свободно помещается в первом открытом в направлении внутрь углублении 2714а, 2714b в первом основании 2716 каркаса; и второй закладной, изогнутый наружу конец 2718а, 2718b, размещенный и в продольном направлении свободно помещающийся во втором открытом внутрь углублении 2720а, 2720b второго основания 2722 каркаса.
Внешний расширяющийся в продольном направлении слоистый ЭАП 2724а, 2724b установлен во внешней части соответствующего второго открытого внутрь углубления 2720а, 2720b напротив второго закладного, изогнутого наружу конца 2718а, 2718b. Внутренний расширяющийся в продольном направлении слоистый ЭАП 2725а, 2725b установлен во внутренней части второго открытого внутрь углубления 2720а, 2720b напротив соответствующей противоположной стороны второго закладного, изогнутого наружу конца 2618а, 2618b. Для удвоения удлинения или сокращения опорной пластины 2704, 2706 еще один внешний расширяющийся в продольном направлении слоистый ЭАП 2734а, 2734b установлен во внешней части соответствующего первого открытого внутрь углубления 2714а, 2714b напротив первого закладного, изогнутого наружу конца 2712а, 2712b. Еще один расширяющийся в продольном направлении слоистый ЭАП 2735а, 2735b установлен во внутренней части первого открытого внутрь углубления 2720а, 2720b напротив соответствующей противоположной стороны первого закладного, изогнутого наружу конца 2612а, 2612b. При этом приведение в действие первой боковой пары внешнего расширяющегося продольно слоистого ЭАП 2724а, 2734а удлиняет опорную пластину 2704, а приведение в действие второй боковой пары внешнего продольно расширяющегося слоистого ЭАП 2724b, 2734b удлиняет опорную пластину 2706. Наоборот, приведение в действие первой боковой пары внутреннего расширяющегося продольно слоистого ЭАП 2726а, 2736а сокращает по длине опорную пластину 2704, а приведение в действие второй боковой пары внутреннего продольно расширяющегося слоистого ЭАП 2726b, 2736b укорачивает опорную пластину 2706.
В каждом из этих вариантов схема регулирования шарнирного поворота может предпочтительно приводить в действие одну или обе опорные ЭАП-пластины для изменения их продольной длины и/или изменения степени их продольного отклонения или изгиба. Например, действие опорных ЭАП-пластин может осуществлять шарнирный поворот соединения и поддерживать стержень запуска, и тем самым оставаться в действии. Согласно еще одному примеру: действие шарнирного соединения можно выполнять отдельно механическим или электрическим средством при помощи схемы управления шарнирным вращением или непосредственно перед запуском (напр., когда определено, что концевой рабочий орган закрыт, или когда дается команда на его закрывание).
Несмотря на то, что настоящее изобретение данным описанием поясняется на примере нескольких осуществлений, и несмотря на то, что поясняющие осуществления изложены в значительной степени подробно, заявитель не предполагает ограничивать объем прилагаемой формулы изобретения этими подробностями. Специалистам в данной области техники будут очевидны и дополнительные преимущества и модификации.
Например, управляемый вручную хирургический инструмент описывается на примере пояснительных вариантов, но нужно отметить, что особенности данного изобретения можно предусмотреть в инструментах, которые установлены в средствах роботизации и управление которыми осуществляют этими средствами. Так, рукояточная часть может содержать наружную часть, установленную в крепежном средстве.
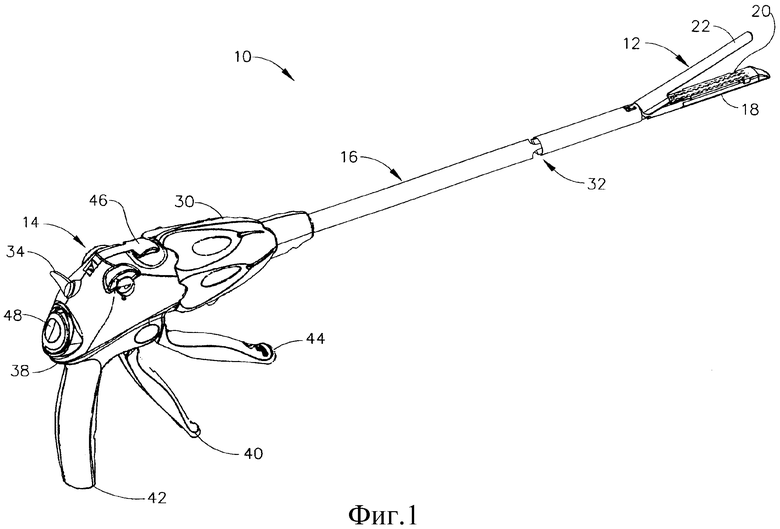
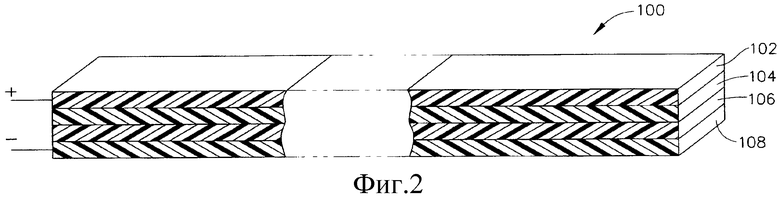

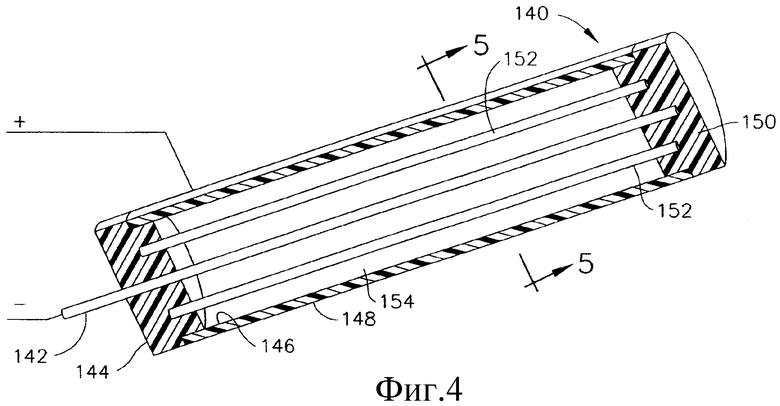
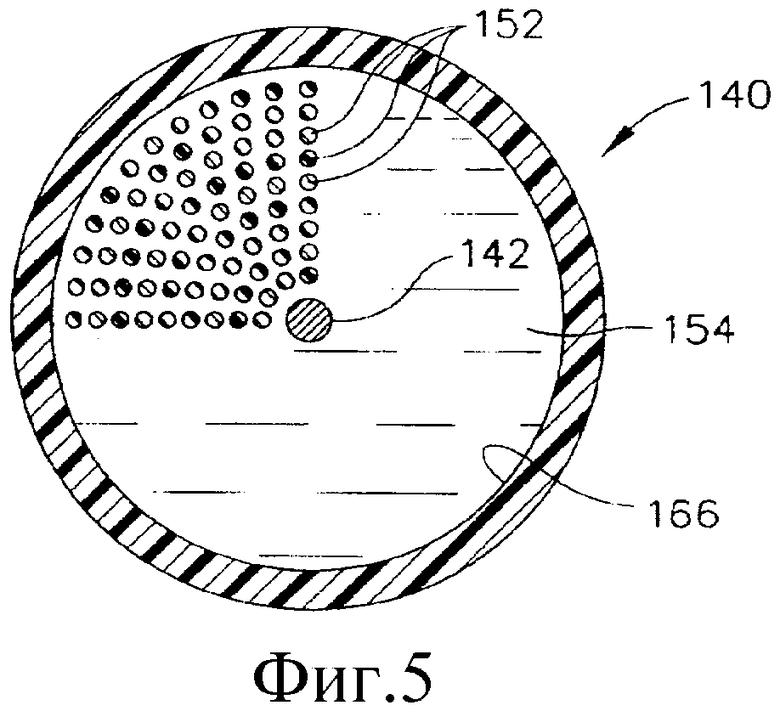
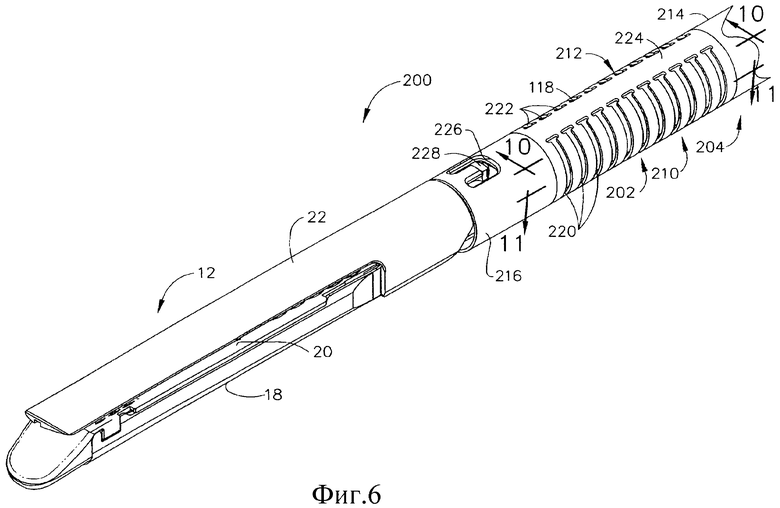
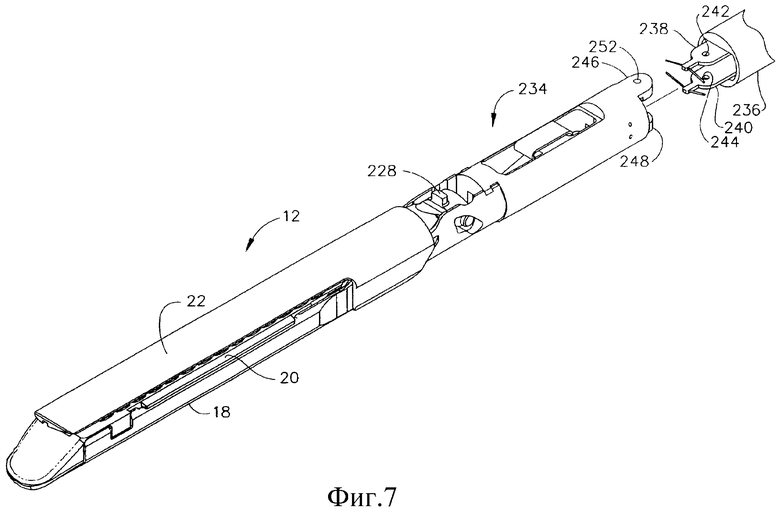
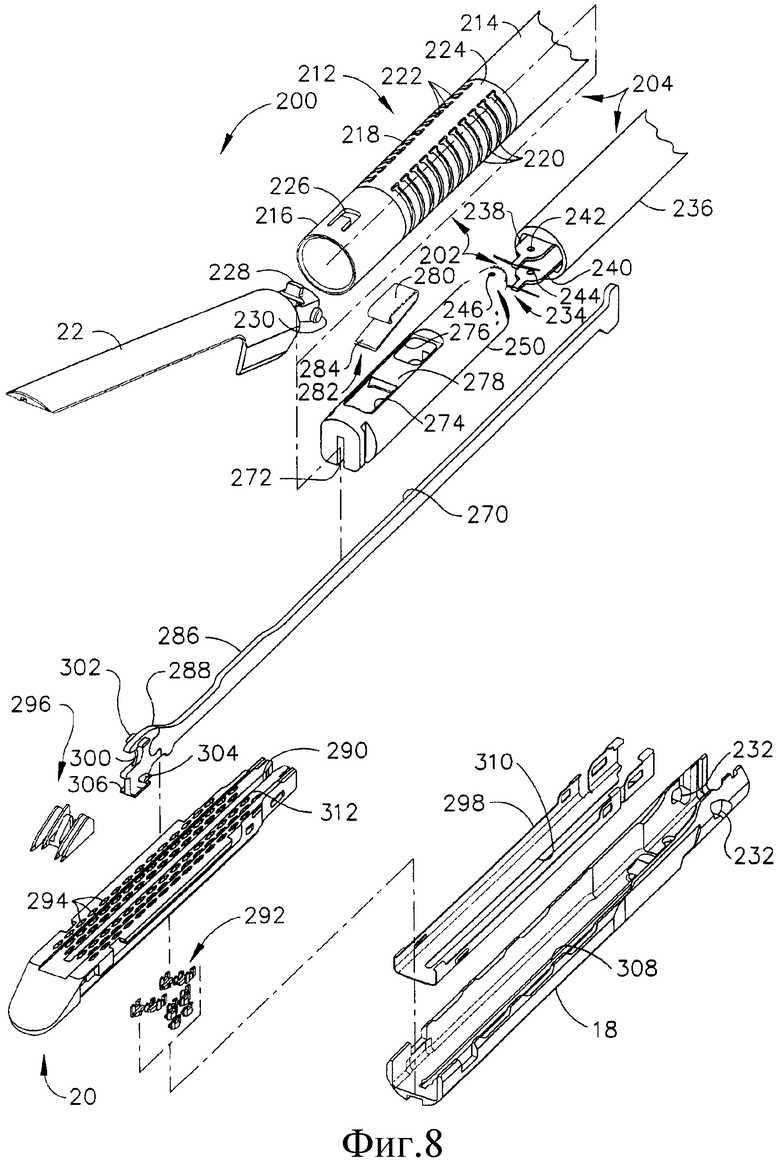
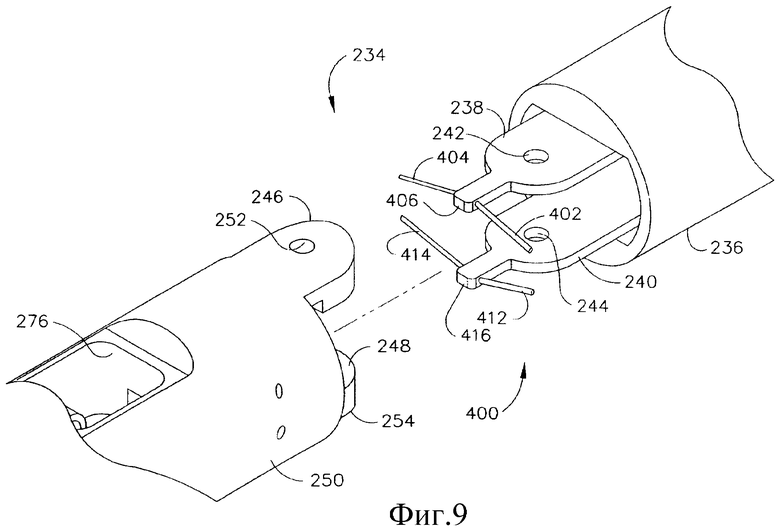
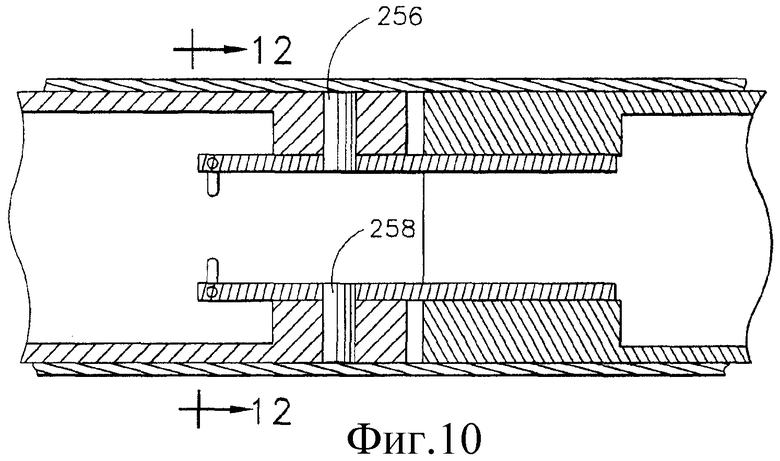
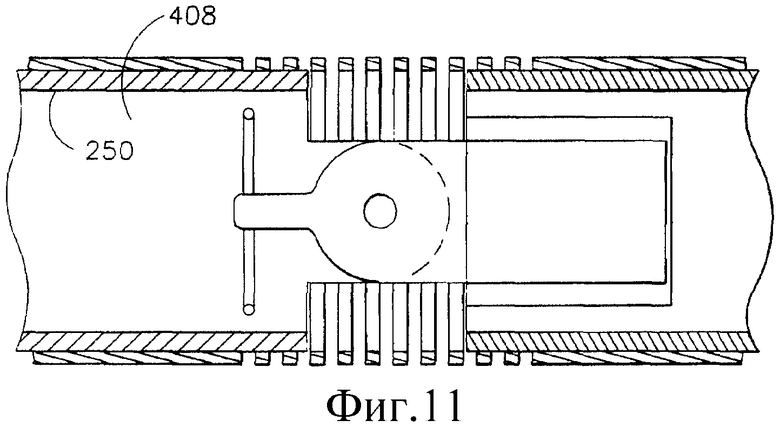
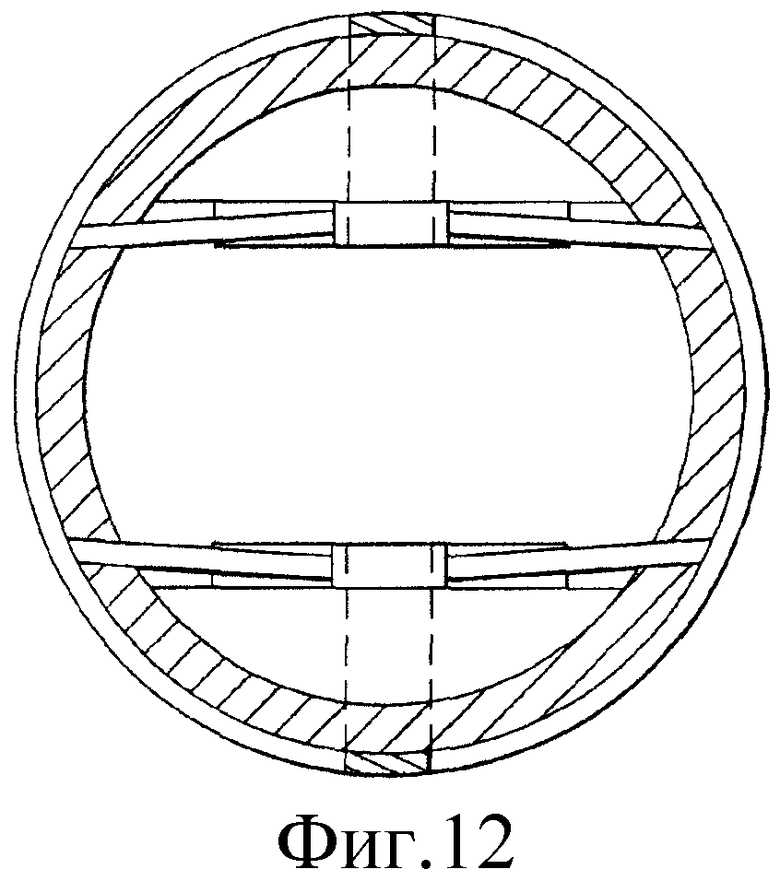
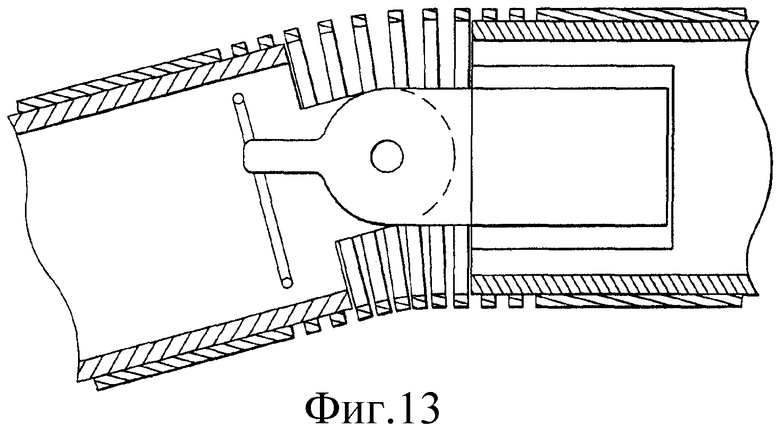
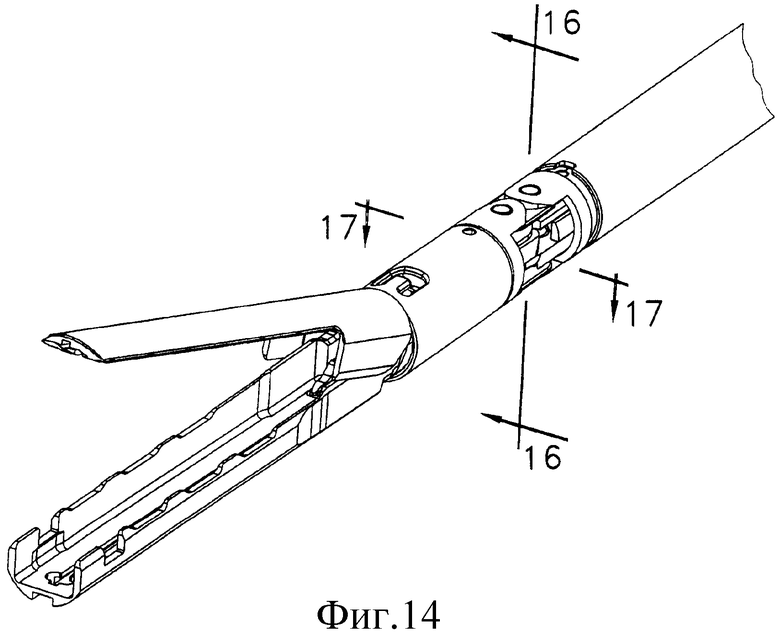
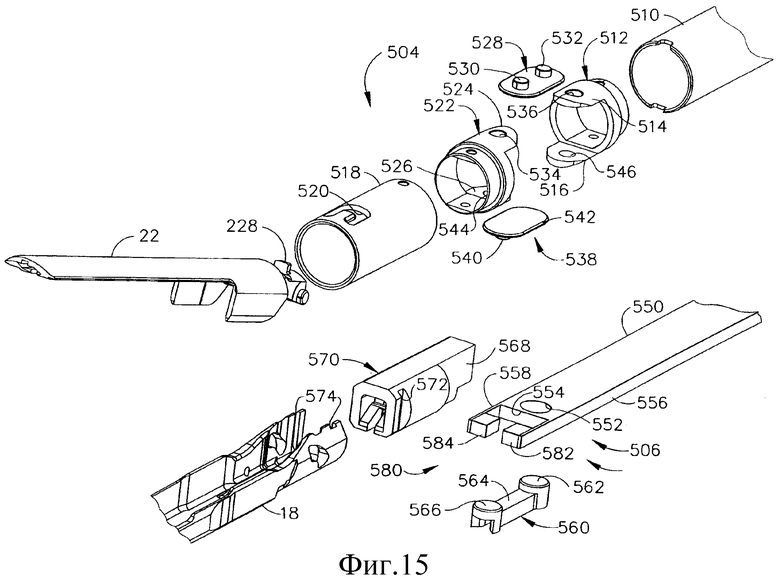
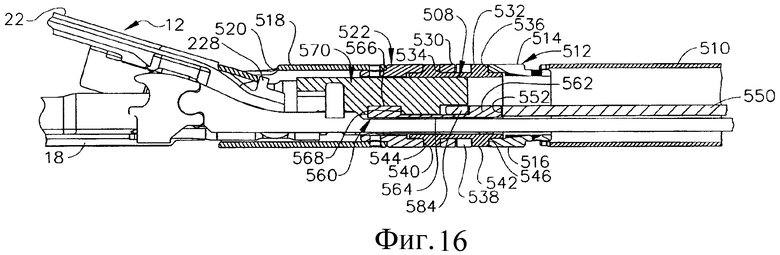
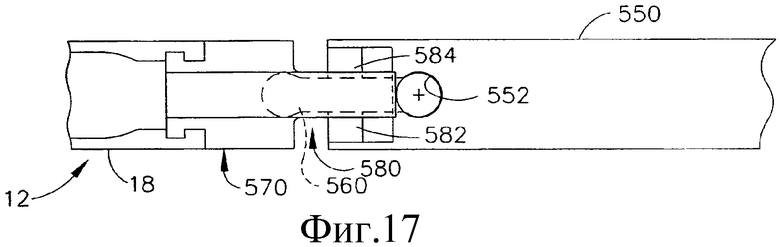
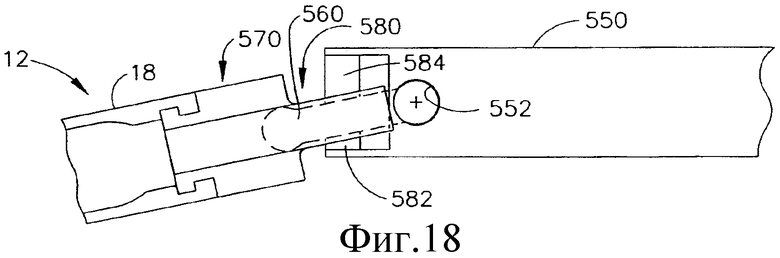

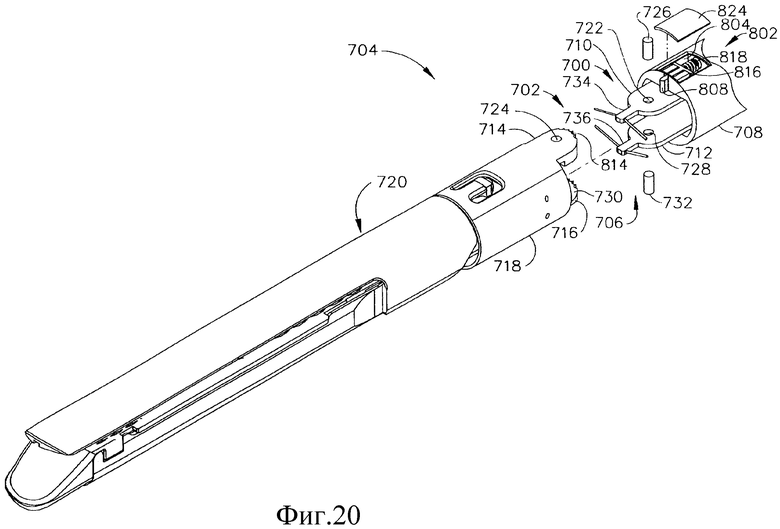
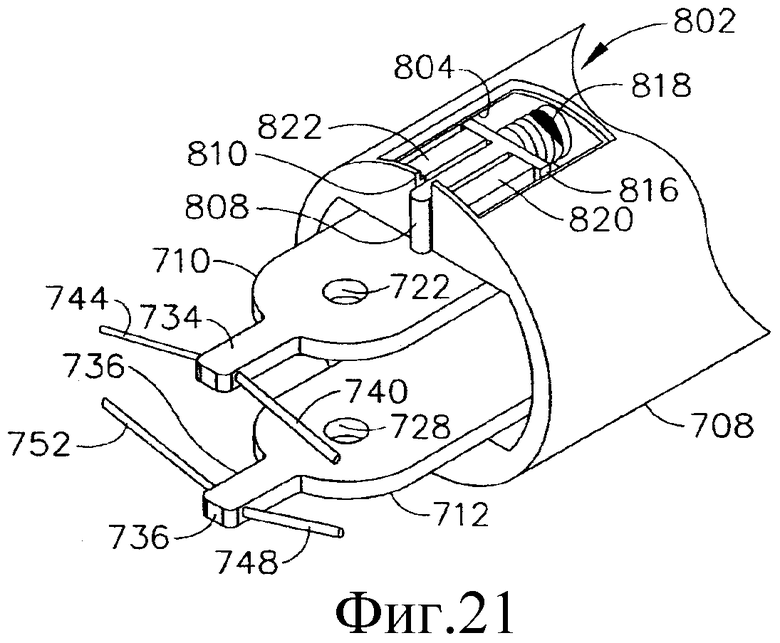
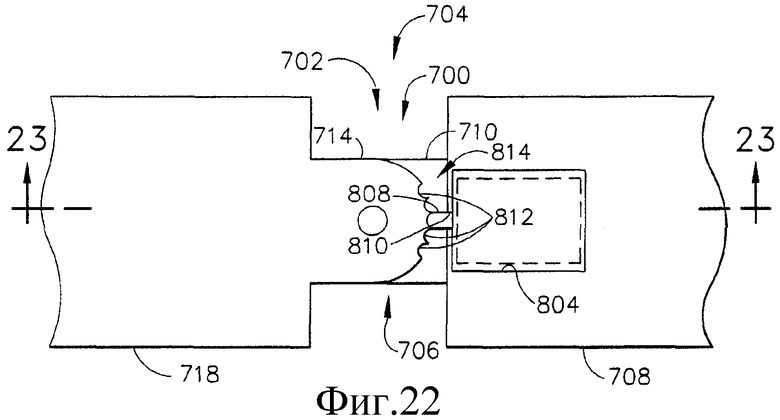
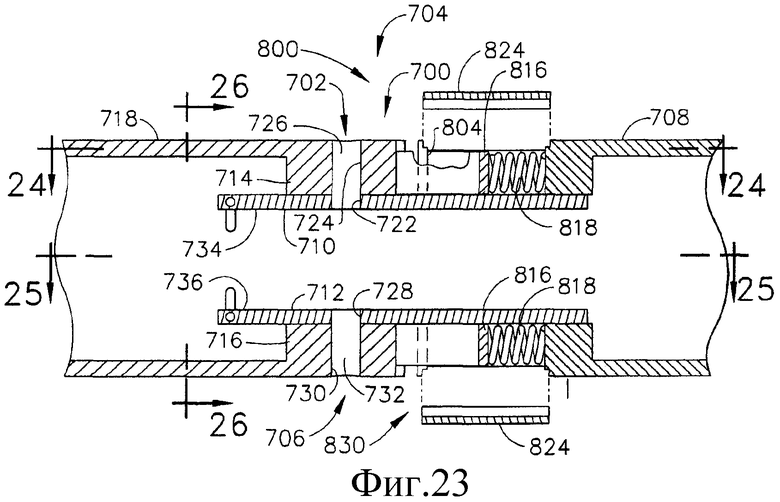

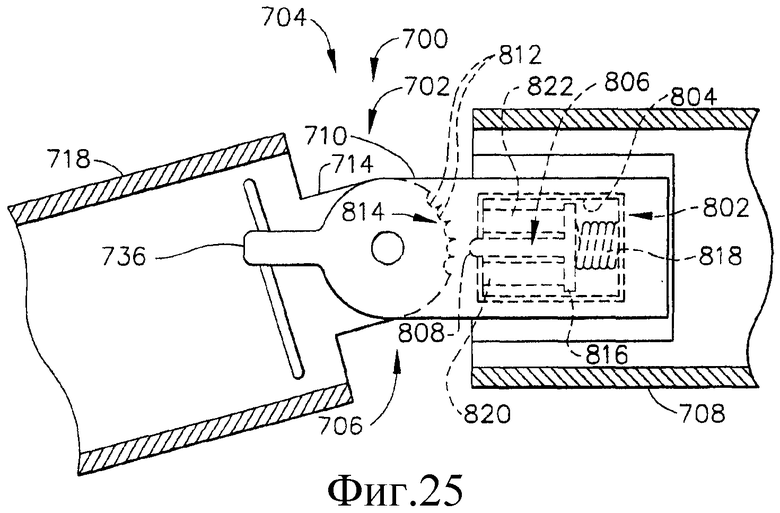
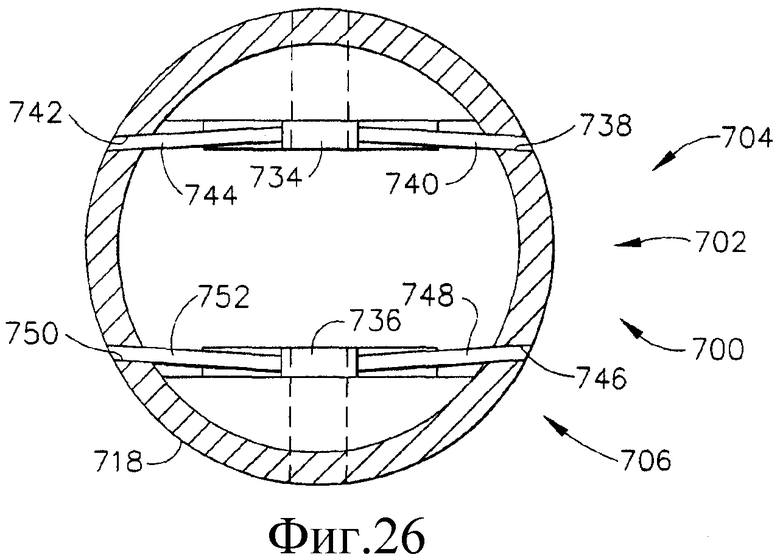
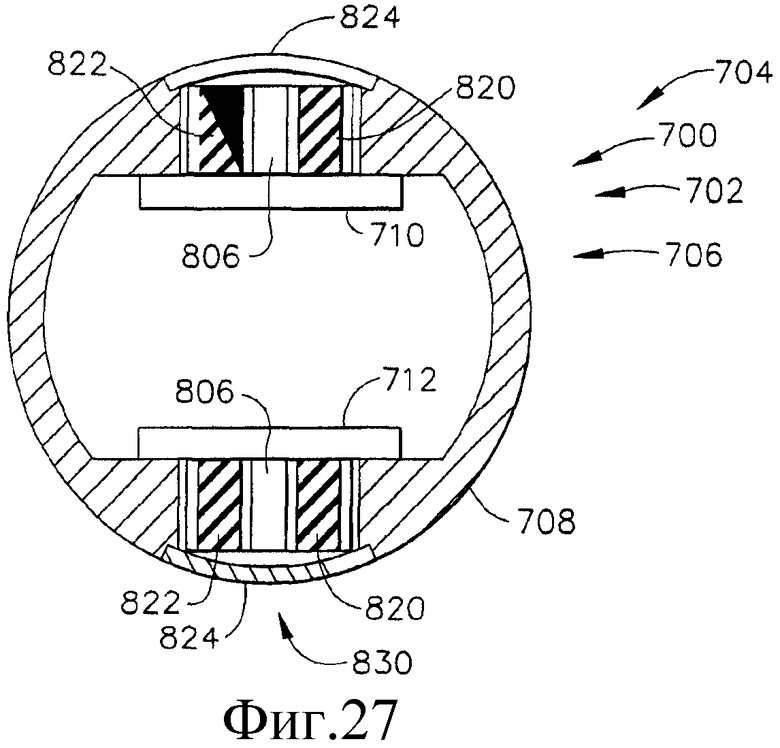
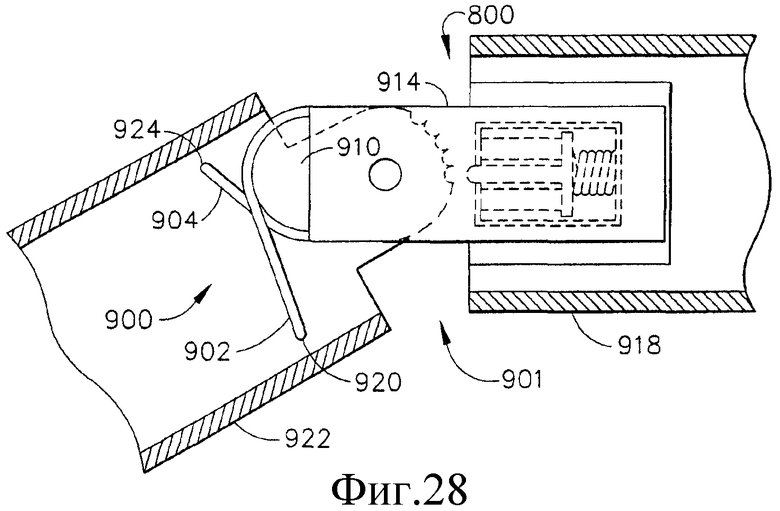
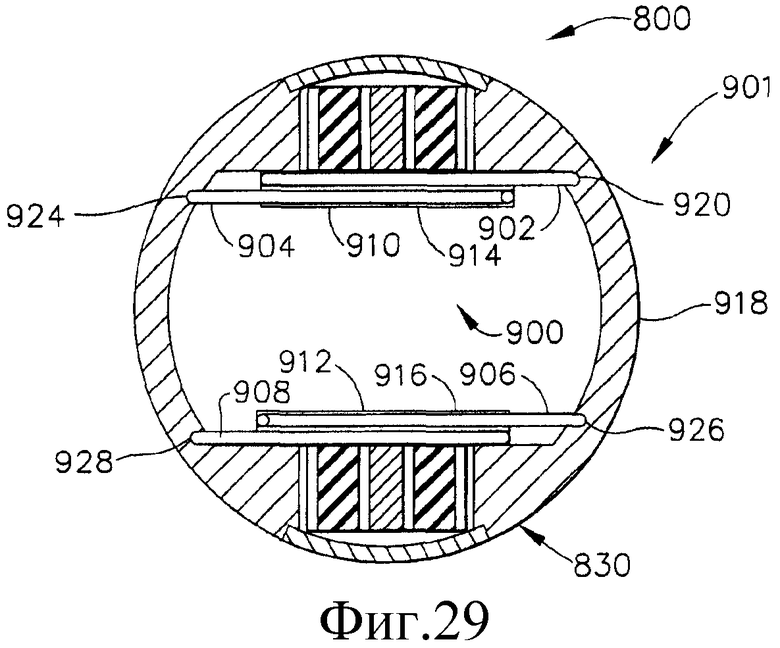
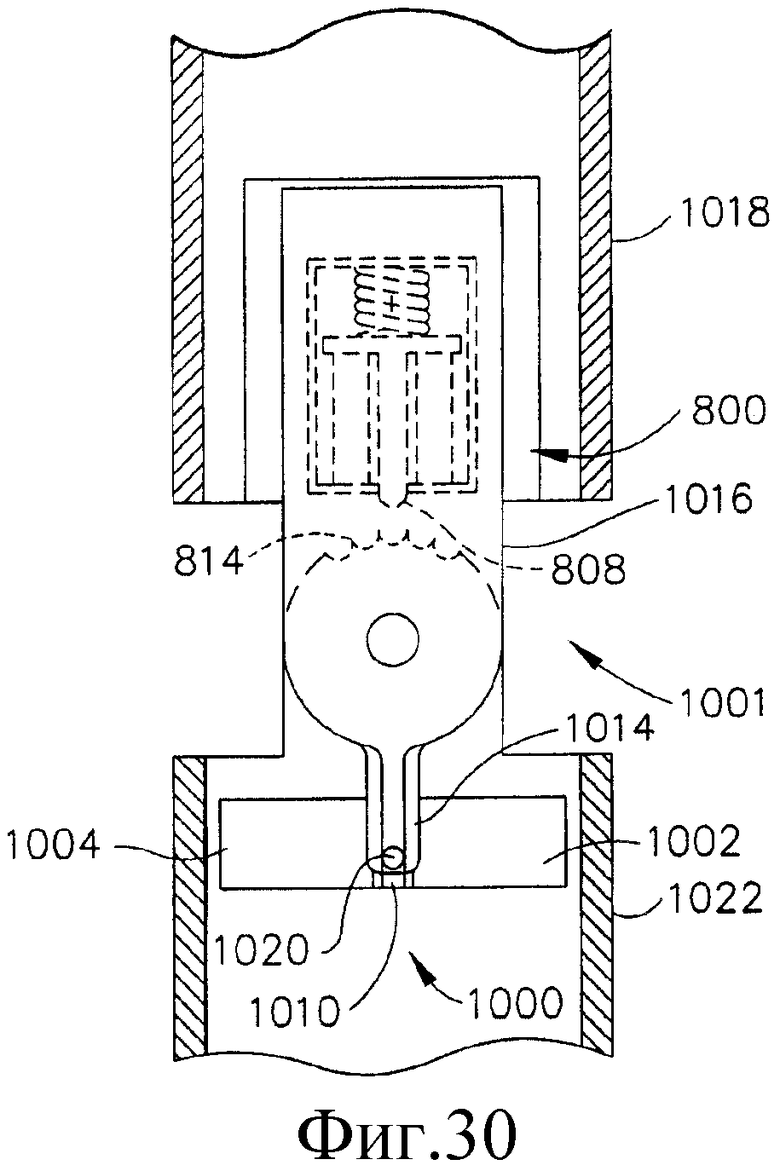
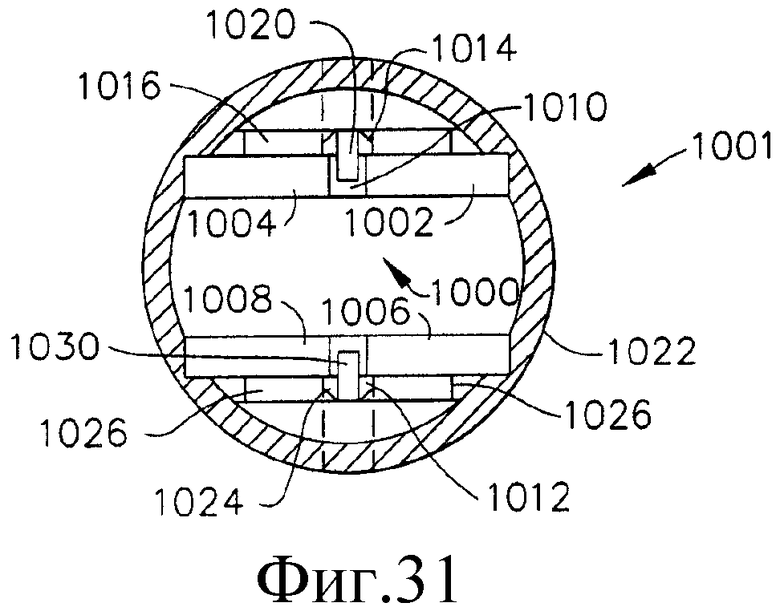
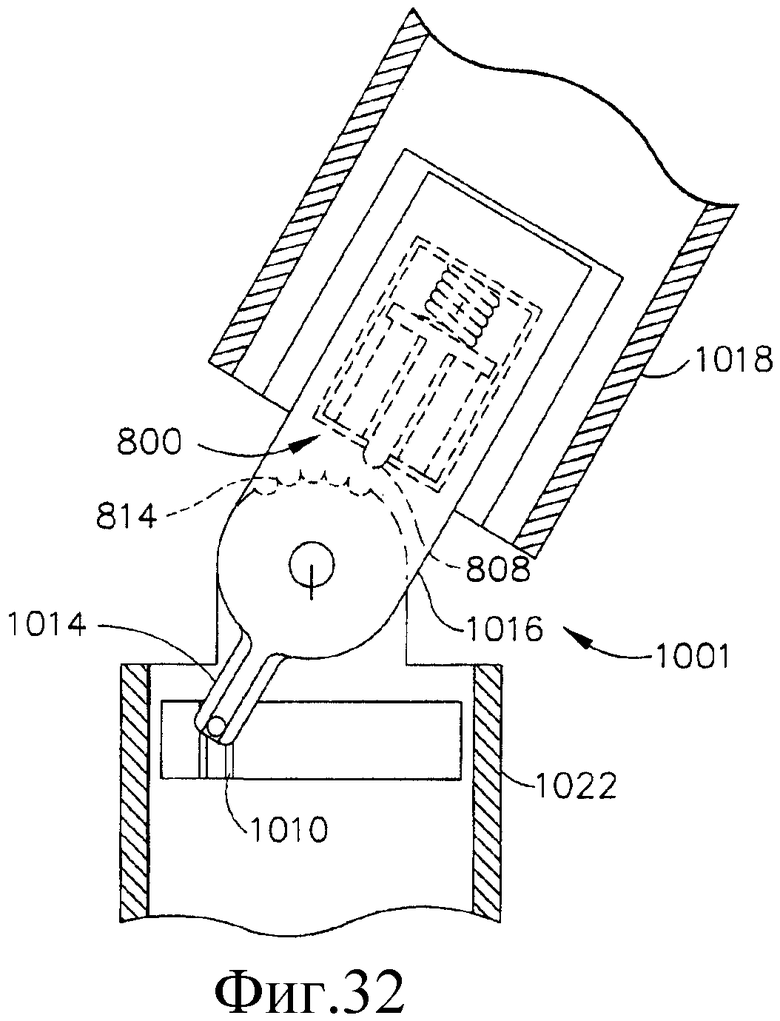

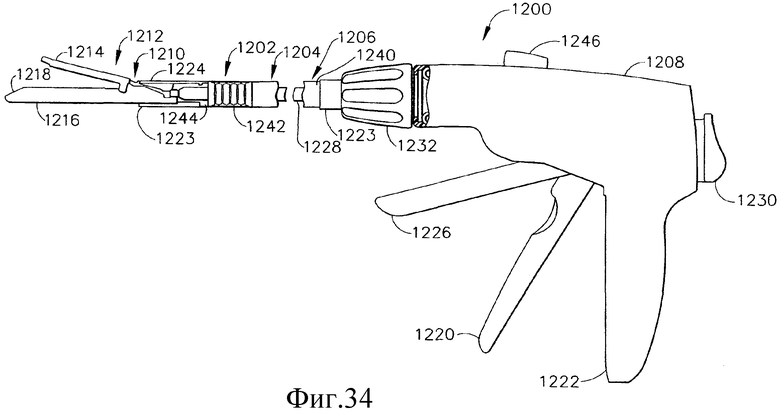
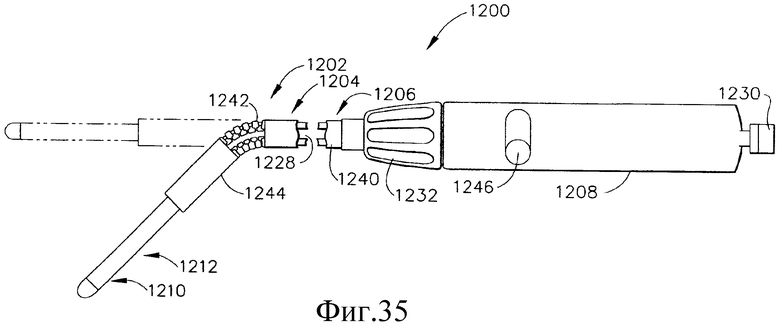
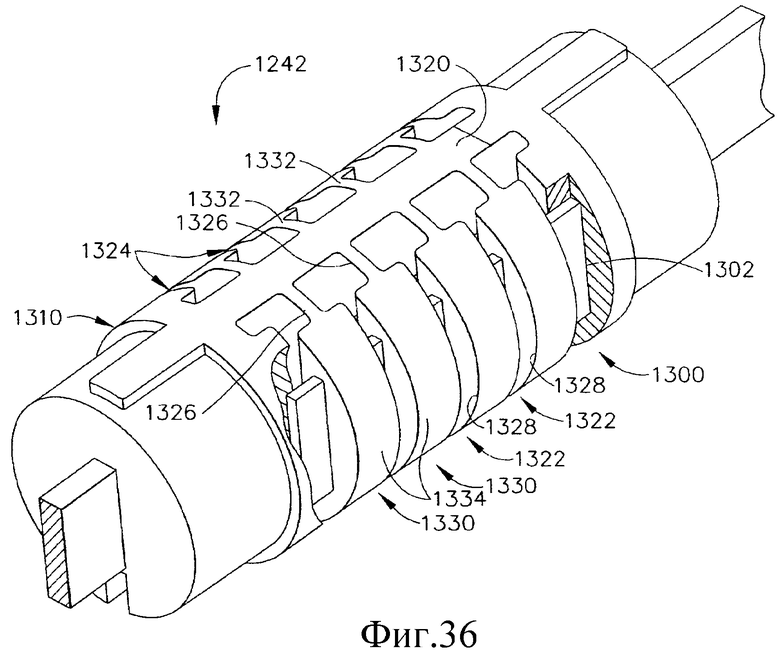

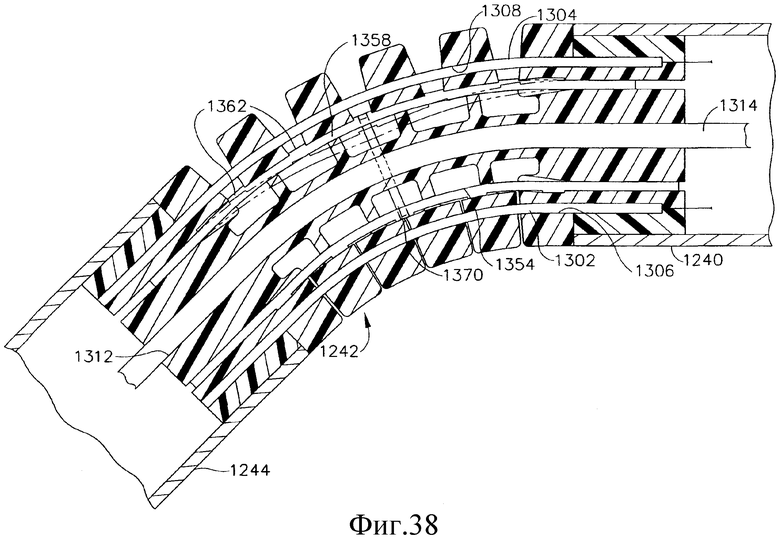
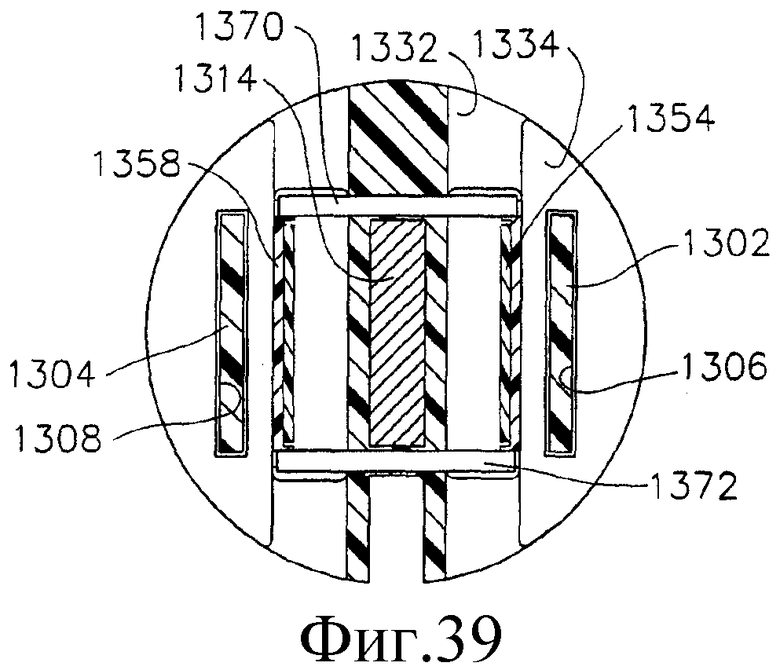

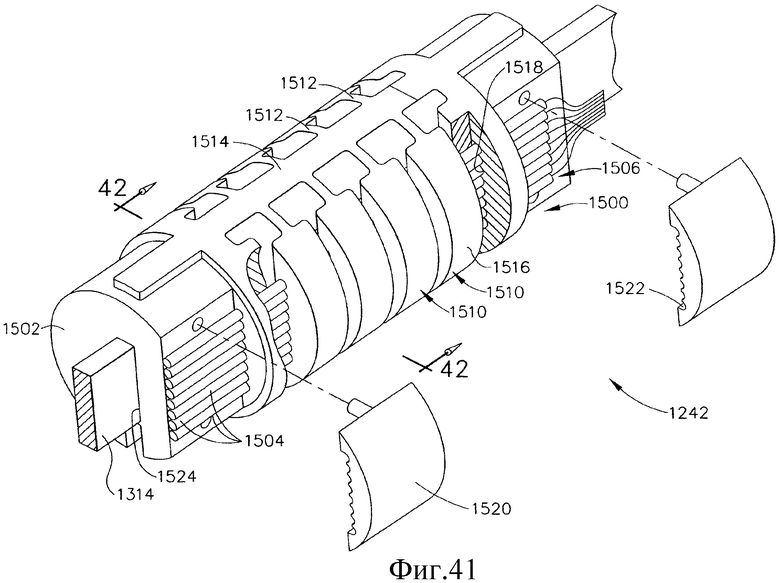
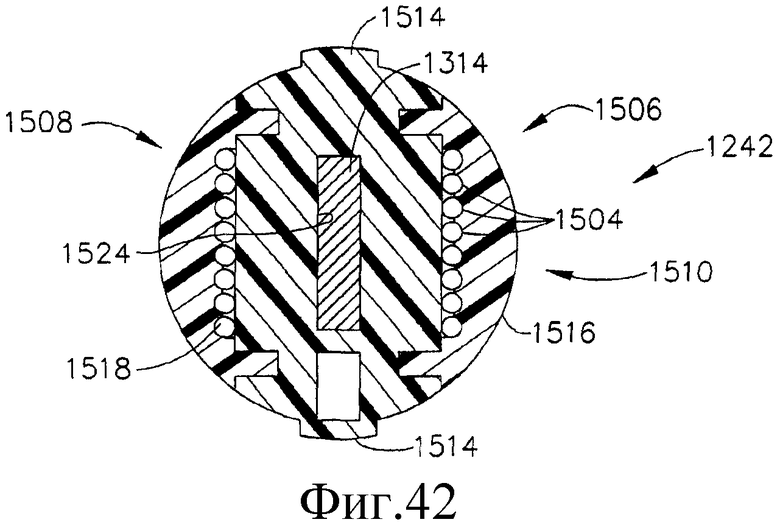
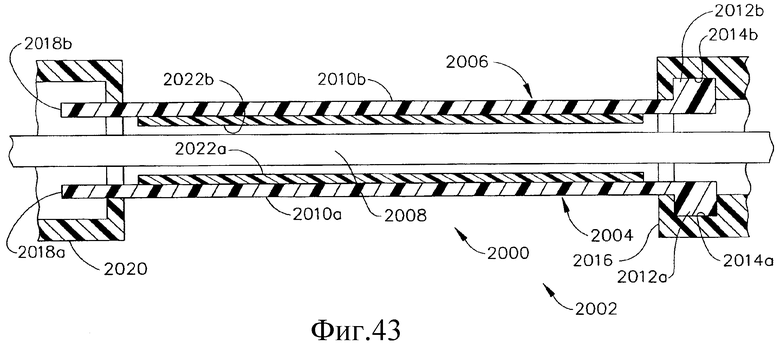
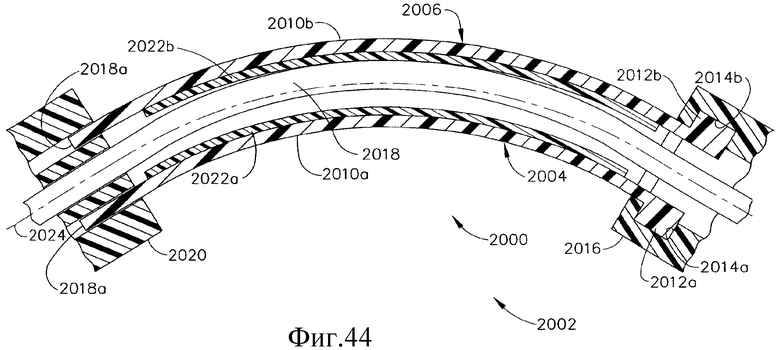
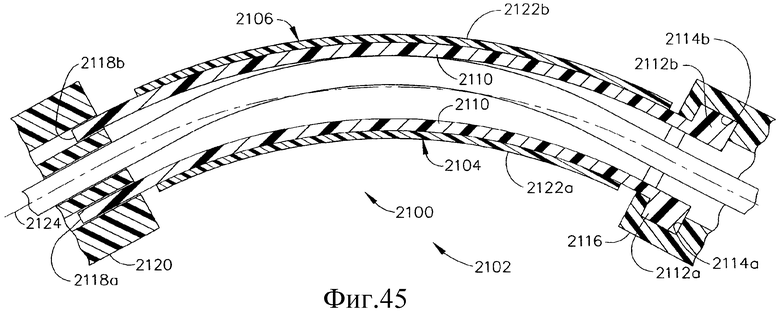
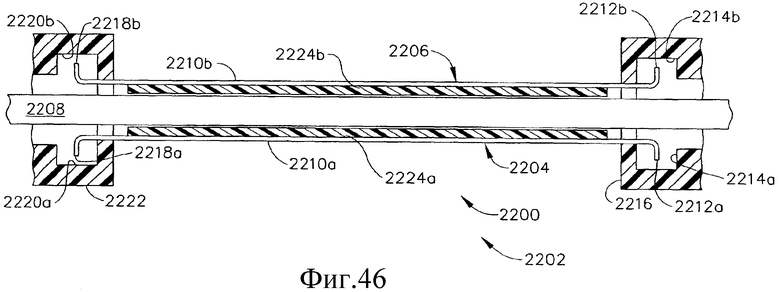
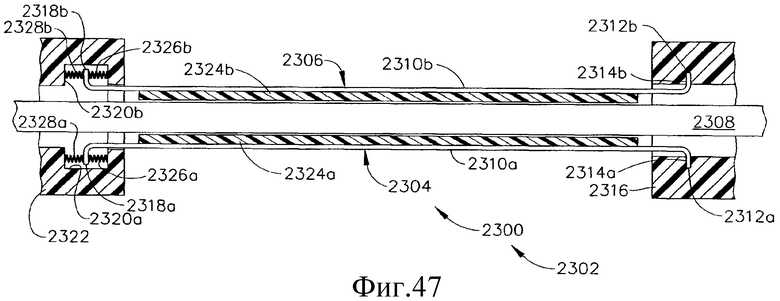
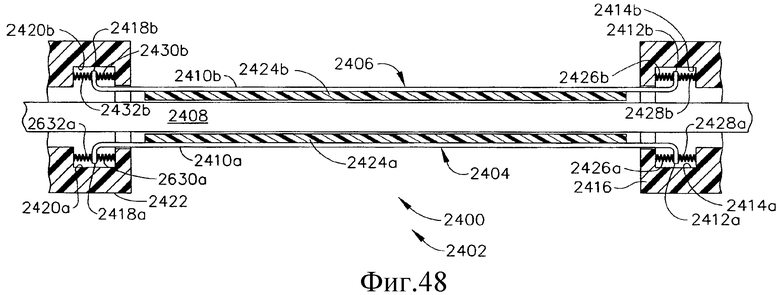
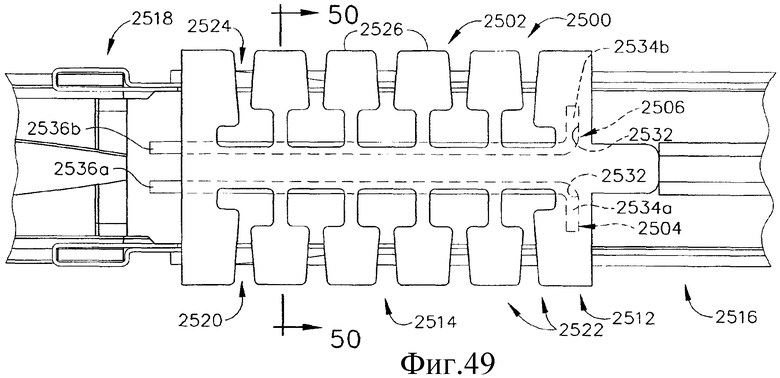
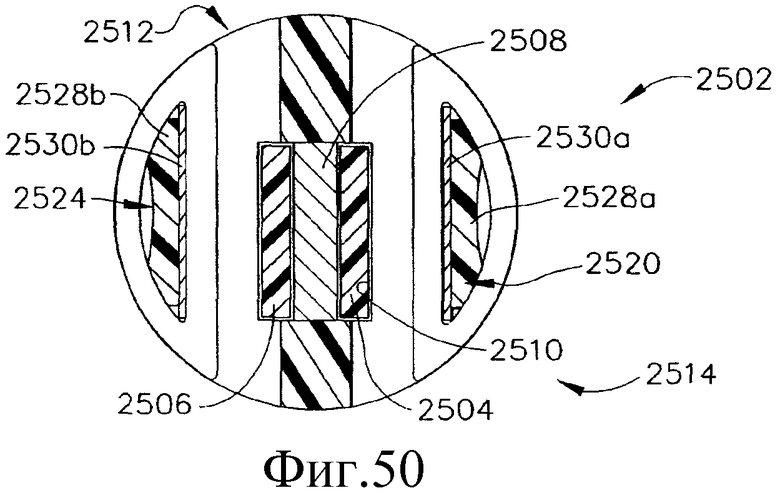
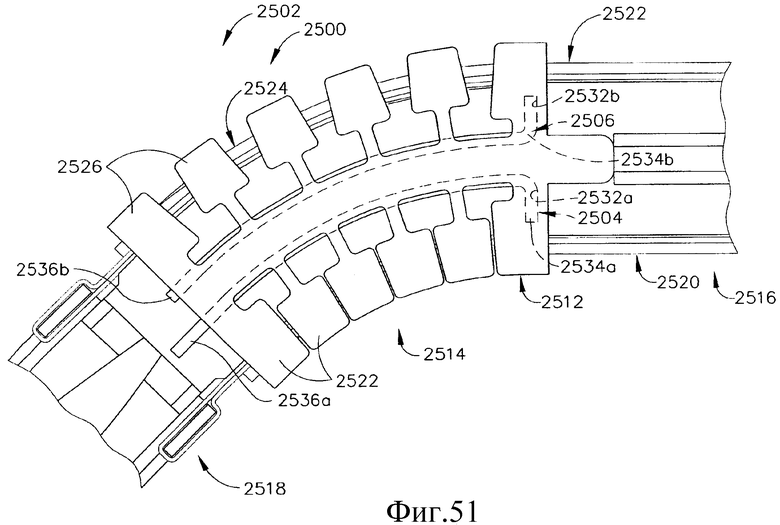
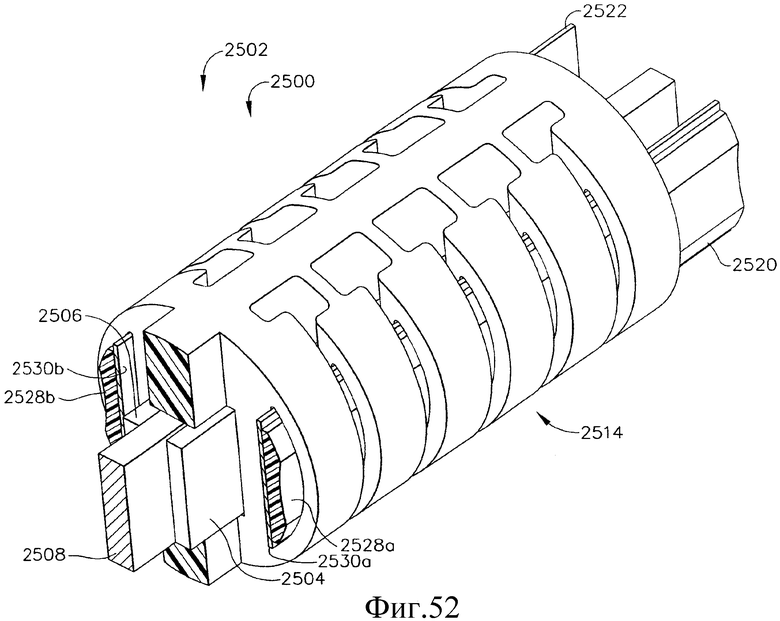
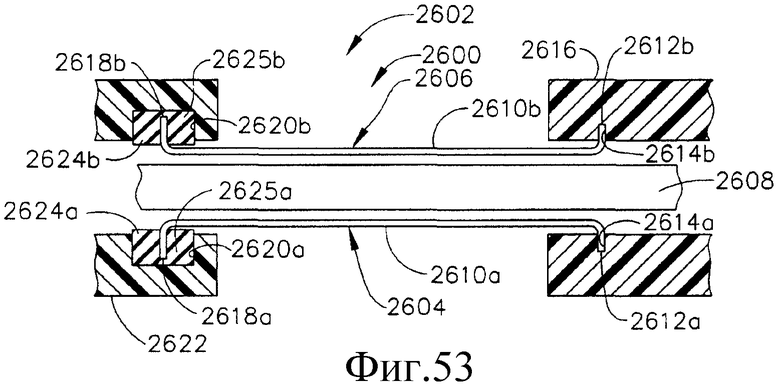
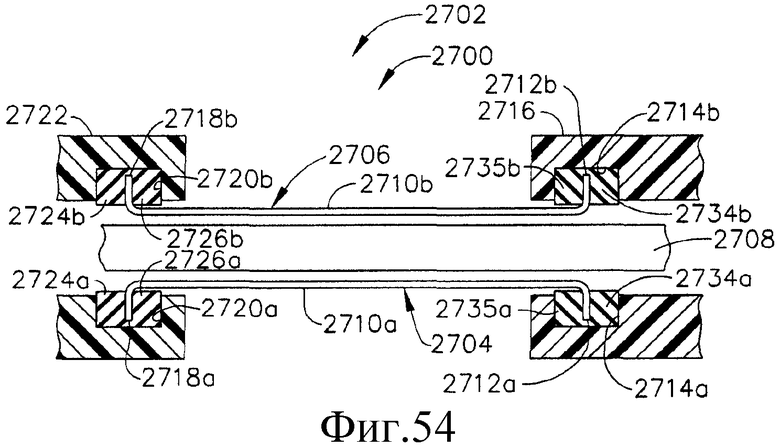
Группа изобретений относится к медицине и может быть использована для эндоскопического введения концевого рабочего органа. Хирургический инструмент для наложения скобок, который осуществляет шарнирный поворот концевого рабочего органа, например наложение скобок и разрезание. Поворот приводят в действие стержнем запуска. Шарнирный механизм в удлиненном валу содержит приводы. Приводы выполнены из электроактивного полимера. На приводы латерально опирается стержень запуска. В результате по существу ограничивается ненужное срабатывание стержня запуска, и при этом ход стержня запуска осуществляют без чрезмерного трения и сгиба. За счет этого обеспечивает стабильное запускающее движение, без излишнего увеличения усилия запуска, требуемого при шарнирном повороте концевого рабочего органа. 3 н. и 15 з.п. ф-лы, 54 ил.
1. Хирургический инструмент, содержащий
рукояточную часть, включающую в себя:
схему управления шарнирным поворотом, выполненную с возможностью формирования сигнала осуществления шарнирного поворота, механизм запуска, содержащий поступательно перемещающийся в продольном направлении стержень запуска;
удлиненный вал, прикрепленный к рукоятке и содержащий прорезь, направляющую стержень запуска; и
концевой рабочий орган, прикрепленный со стороны дистального конца к удлиненному валу и приводимый в действие дистальным концом стержня запуска;
шарнирное соединение, соединяющее удлиненный вал с концевым рабочим органом и в сообщении с сигналом осуществления шарнирного поворота, поступающим по удлиненному валу; и пару выполненных из электроактивного полимера опорных элементов, установленных в шарнирном соединении на каждой боковой стороне стержня запуска и реагирующих на сигнал осуществления шарнирного поворота, чтобы осуществлять регулирование размера, компенсируя осуществление шарнирного поворота в выбранную боковую сторону.
2. Хирургический инструмент по п.1, отличающийся тем, что выбранная одна пара выполненных из электроактивного полимера опорных элементов на внутренней стороне шарнирного перемещения сокращается, реагируя на сигнал осуществления шарнирного поворота.
3. Хирургический инструмент по п.1, отличающийся тем, что выбранная одна пара выполненных из электроактивного полимера опорных элементов на внешней стороне шарнирного перемещения удлиняется, реагируя на сигнал осуществления шарнирного поворота.
4. Хирургический инструмент по п.1, отличающийся тем, что каждый выполненный из электроактивного полимера опорный элемент содержит привод в виде пластины из электроактивного полимера, который отклоняется в поперечном направлении, реагируя на сигнал осуществления шарнирного поворота.
5. Хирургический инструмент по п.4, отличающийся тем, что выбранная одна проксимальная часть и дистальная часть шарнирного соединения содержат углубление в каркасе, сообщающееся с прорезью, направляющей стержень запуска; при этом каждый привод в виде пластины из электроактивного полимера содержит жесткую основу, имеющую отклоняемый в наружном направлении конец, входящий в углубление каркаса, и содержащую выполненный из электроактивного полимера привод, прикрепленный к одной стороне жесткой основы, чтобы осуществлять изгиб, реагируя на сигнал осуществления шарнирного поворота.
6. Хирургический инструмент по п.5, отличающийся тем, что содержит упругий элемент, вставленный в продольном направлении напротив между отклоняемым в наружном направлении концом жесткой основы и стенкой углубления каркаса.
7. Хирургический инструмент по п.5, отличающийся тем, что выполненный из электроактивного полимера привод прикреплен на внутренней поверхности жесткой основы вблизи стержня запуска.
8. Хирургический инструмент по п.5, отличающийся тем, что внутренняя поверхность жесткой основы находится проксимально к стержню запуска, и тем, что выполненный из электроактивного полимера привод прикреплен к внешней поверхности жесткой основы.
9. Хирургический инструмент по п.1, отличающийся тем, что шарнирное соединение содержит проксимальную часть, прикрепленную к удлиненному валу, и дистальную часть, прикрепленную к концевому рабочему органу; при этом проксимальная часть прикреплена для выполнения шарнирного перемещения к дистальной части; причем каждый выполненный из электроактивного полимера привод прикреплен, соответственно, к проксимальной части и дистальной части и выполняет шарнирный поворот, реагируя на сигнал осуществления шарнирного поворота.
10. Хирургический инструмент по п.9, отличающийся тем, что шарнирное соединение содержит проксимальную часть, шарнирно прикрепленную к дистальной части.
11. Хирургический инструмент по п.9, отличающийся тем, что шарнирное соединение содержит верхнюю полосу и нижнюю полосу, каждая из которых выполнена из гибкого и продольно несжимаемого материала и установлена между проксимальной и дистальной частями и множеством левых вертикальных ребер и множеством правых вертикальных ребер;
причем каждое ребро соединено на соответствующей боковой стороне между верхней и нижней полосами.
12. Хирургический инструмент по п.9, отличающийся тем, что выбранная одна пара выполненных из электроактивного полимера опорных элементов на внутренней стороне шарнирного перемещения сокращается, реагируя на сигнал осуществления шарнирного поворота.
13. Хирургический инструмент по п.9, отличающийся тем, что выбранная одна пара выполненных из электроактивного полимера опорных элементов на внешней стороне шарнирного перемещения удлиняется, реагируя на сигнал осуществления шарнирного поворота.
14. Хирургический инструмент по п.9, отличающийся тем, что каждый выполненный из электроактивного полимера опорный элемент содержит привод в виде пластины из электроактивного полимера, отклоняющийся в поперечном направлении, реагируя на сигнал осуществления шарнирного поворота.
15. Хирургический инструмент по п.9, отличающийся тем, что каждый выполненный из электроактивного полимера опорный элемент содержит конструкционный элемент, имеющий продольную часть и согнутый в наружном направлении выступ на каждом конце, размещенный соответственно в проксимальной части и дистальной части шарнирного соединения; и также содержит внутренний и внешний выполненные из электроактивного полимера приводы, каждый из которых выполнен с возможностью продольного расширения и установлен на продольно противоположных сторонах выбранного одного согнутого в наружном направлении выступа; и тем, что соответствующая часть шарнирного соединения содержит открытое во внутреннем направлении углубление, в которое входят внутренний и внешний выполненные из электроактивного полимера приводы и выбранный один согнутый в наружном направлении выступ.
16. Хирургический инструмент по п.15, отличающийся тем, что каждый выполненный из электроактивного полимера опорный элемент также содержит вторую пару внутреннего и внешнего выполненных из электроактивного полимера приводов, каждый из которых выполнен с возможностью продольного расширения и установлен на продольно противоположных сторонах другого одного из согнутых в наружном направлении выступов; и тем, что соответствующая часть шарнирного соединения имеет открытое во внутреннем направлении углубление, в которое входит вторая пара внутреннего и внешнего выполненных из электроактивного полимера приводов и другой один из согнутых в наружном направлении выступов; и имеет схему управления шарнирным поворотом, которая приводит в действие оба внешних выполненных из электроактивного полимера приводов выбранного выполненного из электроактивного полимера опорного элемента, чтобы осуществлять удлинение и приводить в действие оба внутренних выполненных из электроактивного полимера приводов для выполнения сокращения длины.
17. Хирургический инструмент, содержащий:
рукояточную часть, имеющую схему управления шарнирным поворотом, выполненную с возможностью формирования сигнала осуществления шарнирного поворота,
удлиненный вал, прикрепленный к рукояточной части; и
концевой рабочий орган, прикрепленный со стороны дистального конца к удлиненному валу;
шарнирное соединение, соединяющее удлиненный вал с концевым рабочим органом и в сообщении с сигналом осуществления шарнирного поворота, поступающим по удлиненному валу; и
пару выполненных из электроактивного полимера опорных элементов, установленных на боковых сторонах шарнирного соединения; при этом один конец каждого элемента ограничен в продольном направлении и другой конец размещен с возможностью скольжения, каждый из упомянутых элементов выровнен с и смещен от продольной оси удлиненного вала; причем каждый выполненный из электроактивного полимера опорный элемент реагирует на сигнал осуществления шарнирного поворота тем, что изгибается в поперечном направлении.
18. Хирургический инструмент, содержащий:
рукояточную часть, имеющую схему управления шарнирным поворотом, выполненную с возможностью формирования сигнала осуществления шарнирного поворота,
удлиненный вал, прикрепленный к рукояточной части; и
концевой рабочий орган, прикрепленный к удлиненному валу;
шарнирное соединение, соединяющее удлиненный вал с концевым рабочим органом и в сообщении с сигналом осуществления шарнирного поворота, поступающим по удлиненному валу; и
пару выполненных из электроактивного полимера опорных элементов, установленных на боковых сторонах шарнирного соединения; при этом оба конца каждого упомянутого элемента в продольном направлении ограничены в нем, выровнены с и смещены от продольной оси удлиненного вала; причем каждый выполненный из электроактивного полимера опорный элемент реагирует на сигнал осуществления шарнирного поворота тем, что избирательно удлиняется и укорачивается.
| US 5673840 А, 07.10.1997 | |||
| US 4610383 А, 09.09.1986 | |||
| US 4520817 А, 04.01.1985 | |||
| US 4605001 А, 12.08.1986 | |||
| Ушиватель полых органов | 1985 |
|
SU1333319A2 |
| Хирургический сшивающий аппарат | 1983 |
|
SU1183082A1 |

