Изобретение относится к области газотурбинного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными установками (ГТУ) различного назначения.
Известен способ управления ГТУ, реализованный в электронно-гидромеханической САУ супервизорного типа, Черкасов Б.А. «Автоматика и регулирование ВРД». М., «Машиностроение», 1974, с.299-296.
Способ заключается в том, что с целью повышения точности управления управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТУ, заключающийся в том, что в электронном блоке управления двигателем (БУД) с помощью датчиков БУД измеряют частоту вращения силовой турбины, по командам из автоматической системы управления технологическим процессом (АСУ ТП) «Больше» или «Меньше» формируют заданное значение частоты вращения силовой турбины, сравнивают заданное и измеренное значения частоты вращения силовой турбины, в зависимости от рассогласования между заданным и измеренным значениями частоты вращения силовой турбины управляют расходом топлива в камеру сгорания (КС) ГТУ, Ольховский Г.Г. «Энергетические газотурбинные установки». М., Энергоатомиздат, 1985 г., с.77-79.
Недостатком этого способа является следующее.
При отказе АСУ ТП, незафиксированном встроенным контролем, возможно «залипание» команды на изменение заданной частоты вращения силовой турбины. Это может привести к неограниченному изменению режима работы ГТУ: либо к увеличению частоты вращения силовой турбины (при «залипании» команды «Больше») и выходу ГТУ на предельные режимы работы по газогенератору, либо к снижению (при залипании команды «Меньше») и выключению ГТУ без выполнения необходимых технологических операций.
Как следствие, возможно нарушение работоспособности элементов ГТУ (например, рабочих лопаток и дисков турбины), что может привести к повреждению как ГТУ, так и устройства, приводимого от ГТУ (электрогенератора, газоперекачивающего агрегата).
Это снижает надежность и безопасность работы ГТУ.
Целью изобретения является повышение качества работы САУ с целью повышения надежности и безопасности работы ГТУ.
Поставленная цель достигается тем, что в способе управления ГТУ, заключающемся в том, что в электронном БУД с помощью датчиков БУД измеряют частоту вращения силовой турбины, по командам из АСУ ТП «Больше» или «Меньше» формируют заданное значение частоты вращения силовой турбины, сравнивают заданное и измеренное значения частоты вращения силовой турбины, в зависимости от рассогласования между заданным и измеренным значениями частоты вращения силовой турбины управляют расходом топлива в КС ГТУ, дополнительно ограничивают диапазон и темп изменения заданного значения частоты вращения силовой турбины наперед заданными величинами, определяемыми для каждого типа ГТУ расчетно-экспериментальным путем, измеряют и контролируют частоту вращения турбокомпрессора ГТУ, при выходе частоты вращения ротора турбокомпрессора за диапазон, ограниченный наперед заданными значениями, определяемыми расчетно-экспериментальным путем, прекращают изменение режима работы ГТУ и формируют сообщение оператору «Отказ управления от АСУ ТП».
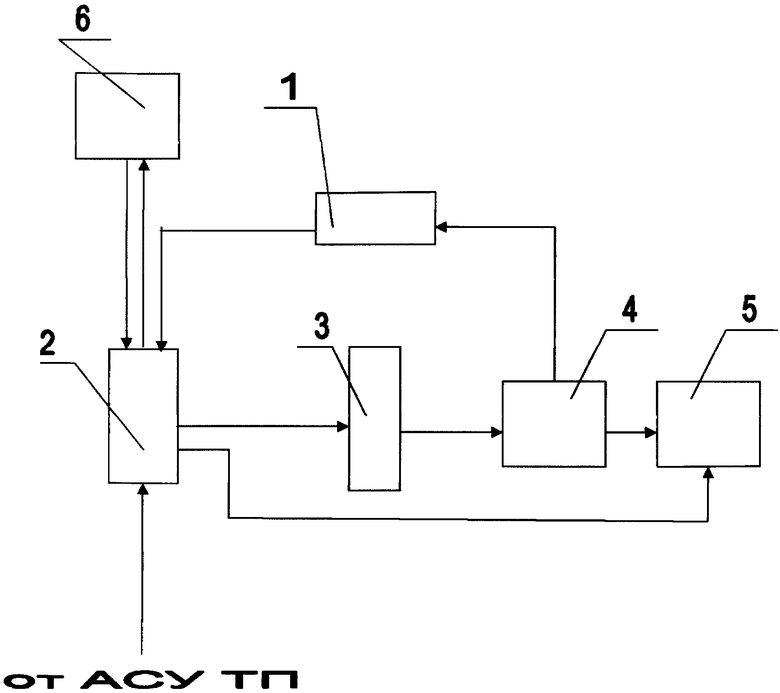
На чертеже представлена схема устройства, реализующего заявляемый способ.
Устройство содержит последовательно соединенные блок 1 датчиков (БД), блок 2 управления двигателем (БУД), блок 3 управления дозирующим агрегатом, дозирующий агрегат 4 (ДГ), стопорный клапан 5 (СКВ), причем ДГ 4 подключен к БД 1, а СКВ 5 - к БУД 2, к БУД 2 подключен пульт 6 управления ГТУ (ПУ). На вход БУД 2 поступают команды от АСУ ТП (на чертеже не показана).
Устройство работает следующим образом.
Оператор, управляющий ГТУ, с помощью ПУ 6 задает режим работы ГТУ: запуск, холостой ход, номинальный режим, максимальный режим, перегрузочный режим.
Команда оператора от ПУ 6 по цифровому каналу связи (например, RS 485 или Ethernet) передается в БУД 2. БУД 2 в соответствии с полученной от ПУ 6 командой по сигналам датчиков из БД 1 по известным зависимостям (см., например, книгу Кеба И.В. «Летная эксплуатация вертолетных ГТД». М., «Транспорт», 1976 г., с.117-135) вычисляет потребный расход топлива в КС ГТУ и с помощью блока 3 и ДГ 4 поддерживает режим работы ГТУ, изменяя расход топлива в КС ГТУ.
В частности, в БУД 2 с помощью БД 1 измеряют частоту вращения силовой турбины, сравнивают заданное (nст уст) и измеренное значения частоты вращения силовой турбины, в зависимости от рассогласования между заданным и измеренным значениями частоты вращения силовой турбины управляют расходом топлива в КС ГТУ.
При работе ГТУ СКВ 5 находится в положении «Открыт».
Дополнительно на всех режимах работы ГТУ от холостого хода до максимального обеспечивают защиту ГТУ по предельным параметрам следующим образом.
В БУД 2 по командам АСУ ТП («Больше», «Меньше») изменяют заданное значение частоты вращения силовой турбины, но при этом ограничивают диапазон и темп изменения заданного значения наперед заданными величинами, определяемыми для каждого типа ГТУ расчетно-экспериментальным путем.
Для ГТЭ-25ПЭР разработки и производства ОАО «Авиадвигатель», г.Пермь, эти значения составляют:
- темп изменения nст уст по сигналам «Больше»/«Меньше» -  ;
;
- диапазон изменения nст уст=(4800…5200) об/мин.
Кроме этого в БУД 2 с помощью БД 1 измеряют и контролируют частоту вращения турбокомпрессора ГТУ, при выходе частоты вращения ротора турбокомпрессора за диапазон, ограниченный наперед заданными значениями, определяемыми расчетно-экспериментальным путем, прекращают изменение режима работы ГТУ и формируют сообщение оператору «Отказ управления от АСУ ТП».
Для ГТЭ-25ПЭР разработки и производства ОАО «Авиадвигатель», г.Пермь, эти значения определяются следующим образом.
Максимальное значение частоты вращения ротора турбокомпрессора определяется по программе:

где
11777 - предельное допустимое значение максимальной частоты вращения ротора турбокомпрессора для данного типа ГТУ. Определяется расчетно-экспериментальным путем в ходе проектирования, доводки и опытной эксплуатации ГТУ. Приведенное в примере значение определено для ГТЭ-25ПЭР;
Rвд max - регулировка предельно допустимой максимальной частоты вращения ротора турбокомпрессора, учитывающая индивидуальные особенности конкретной ГТУ. Определяется в процессе приемо-сдаточных испытаний (ПСИ) ГТУ и заносится для использования и хранения в запоминающее устройство БУД 2 (не показано). Для ГТЭ-25ПЭР величина этой регулировки меняется в диапазоне от минус 500 об/мин до +500 об/мин;
Cnвд Твх=f(Tвх) - коэффициент коррекции программы по температуре воздуха на входе в ГТУ.
Зависимость Cnвд Твх=f(Tвх) представлена в таблице 1.
80 - величина снижения предельно допустимого значения максимальной частоты вращения ротора турбокомпрессора для данного типа ГТУ, обусловленная уменьшением расхода воздуха через турбокомпрессор из-за его отбора на нужды протиовобледенительной системы (ПОС). Определяется расчетно-экспериментальным путем в ходе проектирования, доводки и опытной эксплуатации ГТУ. Приведенное в примере значение определено для ГТЭ-25ПЭР;
 - регулировка величины снижения предельно допустимой максимальной частоты вращения ротора турбокомпрессора, учитывающая индивидуальные особенности конкретной ГТУ. Определяется в процессе ПСИ ГТУ и заносится для использования и хранения в запоминающее устройство БУД 2 (не показано). Для ГТЭ-25ПЭР величина этой регулировки меняется в диапазоне от минус 50 об/мин до +100 об/мин;
- регулировка величины снижения предельно допустимой максимальной частоты вращения ротора турбокомпрессора, учитывающая индивидуальные особенности конкретной ГТУ. Определяется в процессе ПСИ ГТУ и заносится для использования и хранения в запоминающее устройство БУД 2 (не показано). Для ГТЭ-25ПЭР величина этой регулировки меняется в диапазоне от минус 50 об/мин до +100 об/мин;
СПОС=1,0 - коэффициент коррекции  при поступлении сигнала из АСУ ТП о включении (ПОС) ГТУ.
при поступлении сигнала из АСУ ТП о включении (ПОС) ГТУ.
При поступлении сигнала из АСУ ТП о выключении ПОС коэффициент СПОС=0.
Минимальное значение частоты вращения ротора турбокомпрессора определяется по программе:

где
9575 - предельное допустимое значение минимальной частоты вращения ротора турбокомпрессора для работающей ГТУ данного типа. Определяется расчетно-экспериментальным путем в ходе проектирования, доводки и опытной эксплуатации ГТУ. Приведенное в примере значение определено для ГТЭ-25ПЭР;
Rвд min - регулировка предельно допустимой минимальной частоты вращения ротора турбокомпрессора, учитывающая индивидуальные особенности конкретной ГТУ. Определяется в процессе ПСИ ГТУ и заносится для использования и хранения в запоминающее устройство БУД 2 (не показано). Для ГТЭ-25ПЭР величина этой регулировки меняется в диапазоне от минус 250 об/мин до +500 об/мин;
CТвх n=f(T*вх).
Зависимость CТвх n=f(T*вх) представлена в таблице 2.
Таким образом, за счет повышения качества работы САУ обеспечивается защита ГТУ по предельным параметрам при отказе АСУ ТП, как следствие, повышение надежности и безопасности работы ГТУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2010 |
|
RU2431051C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2009 |
|
RU2425996C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2010 |
|
RU2431753C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА НА ЗАПУСКЕ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2009 |
|
RU2422658C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА НА ЗАПУСКЕ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2009 |
|
RU2427721C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2009 |
|
RU2427722C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2009 |
|
RU2422683C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ ЭЛЕКТРОСТАНЦИЕЙ | 2011 |
|
RU2453980C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2010 |
|
RU2451921C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОЙ СУДОВОЙ УСТАНОВКИ | 2011 |
|
RU2493393C2 |
Изобретение относится к области газотурбинного двигателестроения и может быть использовано в электронно-гидро-механических системах (САУ) автоматического управления газотурбинными установками (ГТУ) различного назначения. Дополнительно ограничивают диапазон и темп изменения заданного значения частоты вращения силовой турбины наперед заданными величинами, определяемыми для каждого типа ГТУ расчетно-экспериментальным путем, измеряют и контролируют частоту вращения турбокомпрессора ГТУ, при выходе частоты вращения ротора турбокомпрессора за диапазон, ограниченный наперед заданными значениями, определяемыми расчетно-экспериментальным путем, прекращают изменение режима работы ГТУ и формируют сообщение оператору «Отказ управления от АСУ ТП». Технический результат изобретения - повышение качества работы САУ и, как следствие, повышение надежности и безопасности работы ГТУ. 1 ил., 2 табл.
Способ управления ГТУ, заключающийся в том, что в электронном блоке управления двигателем (БУД) с помощью датчиков БУД измеряют частоту вращения силовой турбины, по командам из АСУ ТП «Больше» или «Меньше» формируют заданное значение частоты вращения силовой турбины, сравнивают заданное и измеренное значения частоты вращения силовой турбины, в зависимости от рассогласования между заданным и измеренным значениями частоты вращения силовой турбины управляют расходом топлива в камеру сгорания (КС) ГТУ, дополнительно ограничивают диапазон и темп изменения заданного значения частоты вращения силовой турбины наперед заданными величинами, определяемыми для каждого типа ГТУ расчетно-экспериментальным путем, измеряют и контролируют частоту вращения турбокомпрессора ГТУ, при выходе частоты вращения ротора турбокомпрессора за диапазон, ограниченный наперед заданными значениями, определяемыми расчетно-экспериментальным путем, прекращают изменение режима работы ГТУ и формируют сообщение оператору «Отказ управления от АСУ ТП».
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2376487C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ СО СВОБОДНОЙ ТУРБИНОЙ | 2008 |
|
RU2375598C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОЙ УСТАНОВКИ ОТ РАСКРУТКИ СИЛОВОЙ ТУРБИНЫ | 2006 |
|
RU2316665C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОТКЛОНЕНИЯ ПАРАМЕТРОВ СИЛОВОЙ ТУРБИНЫ ТУРБОМАШИННОГО АГРЕГАТА ПРИ ВНЕЗАПНОМ ПОЛНОМ ИЛИ ЧАСТИЧНОМ СБРОСЕ НАГРУЗКИ | 2002 |
|
RU2225945C2 |
| US 5609465 A, 11.03.1997 | |||
| US 6321525 В, 27.11.2001. | |||

