Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления авиационными газотурбинными двигателями (ГТД) и газотурбинными установками (ГТУ) различного назначения.
Известен способ управления ГТД, заключающийся в том, что по измеренной частоте вращения ротора двигателя по известной зависимости формируют заданное положение лопаток входного направляющего аппарата (ВНА) компрессора двигателя, в соответствии с ним до заданной частоты вращения удерживают лопатки ВНА в положении «закрыто», после выхода двигателя на режимы, где частота вращения выше заданной, устанавливают лопатки ВНА в положении «открыто» (Югов O.K., Селиванов О.Д. «Основы интеграции самолета и двигателя», М., «Машиностроение», 1989, с.77-80).
Недостатком известного способа является его низкая эффективность с точки зрения обеспечения требуемых запасов газодинамической устойчивости (ГДУ) компрессора и, как следствие, невозможность использования для управления современными ГТД, а именно турбореактивными двигателями с высокой степенью двухконтурности (ТРДД), такими, например, как двигатели семейства ПС-90А.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, заключающийся в том, что измеряют частоту вращения ротора двигателя и температуру воздуха на входе в двигатель, по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, по известной зависимости формируют заданное положение лопаток входного направляющего аппарата (ВНА) компрессора двигателя, сравнивают его с измеренным положение лопаток ВНА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток ВНА (Шляхтенко С.М. «Теория авиационных ВРД», М., «Машиностроение», 1975, с.411-414).
Недостатком этого способа является следующее.
При использовании этого способа в наземных двухвальных ГТУ различного назначения (например, ГТУ-25Ц, ГТЭ-25ПЭР разработки и производства ОАО «Авиадвигатель», г.Пермь), имеющих компрессор низкого давления (КНД), компрессор высокого давления (КВД) и регулируемый ВНА КВД, приведение по температуре воздуха на входе в двигатель снижает точность поддержания расхода воздуха через ВНА КВД
Снижение точности управления расходом воздуха через КВД может приводить к увеличению удельного расхода топлива и снижению запасов ГДУ КВД. Это снижает экономичность и надежность работы двигателя.
Целью изобретения является повышение качества работы САУ и, как следствие, повышение экономичности и надежности работы ГТУ.
Поставленная цель достигается тем, что в способе управления ГТУ, имеющего компрессор низкого давления (КНД) и компрессор высокого давления (КВД) заключающемся в том, что измеряют частоту вращения ротора КВД и температуру воздуха на входе в ГТУ, по измеренной частоте вращения ротора КВД и температуре воздуха на входе в ГТУ формируют значение приведенной частоты вращения ротора КВД, по приведенной частоте вращения ротора КВД по известной зависимости формируют заданное положение лопаток входного направляющего аппарата (ВНА) КВД, сравнивают его с измеренным положением лопаток ВНА КВД, по величине рассогласования между заданным и измеренным значениями формируют первое управляющее воздействие на привод лопаток ВНА КВД, дополнительно измеряют частоту вращения ротора КНД по температуре воздуха на входе в ГТУ и по частоте вращения ротора КНД по наперед заданной зависимости, определяемой расчетно-экспериментальным путем, вычисляют температуру воздуха на входе в КВД, по температуре воздуха на входе в КВД и по известной зависимости формируют второе значение приведенной частоты вращения КВД, по второй приведенной частоте вращения КВД по известной зависимости формируют второе заданное положение лопаток ВНА КВД, сравнивают его с измеренным положением лопаток ВНА КВД, по величине рассогласования между вторым заданным и измеренным значениями положения лопаток ВНА КВД формируют второе управляющее воздействие на привод лопаток ВНА КВД и осуществляют по нему управление приводом лопаток ВНА КВД, при невозможности из-за отказов в САУ формирования второго управляющего воздействия осуществляют управление приводом лопаток ВНА КВД по первому управляющему воздействию.
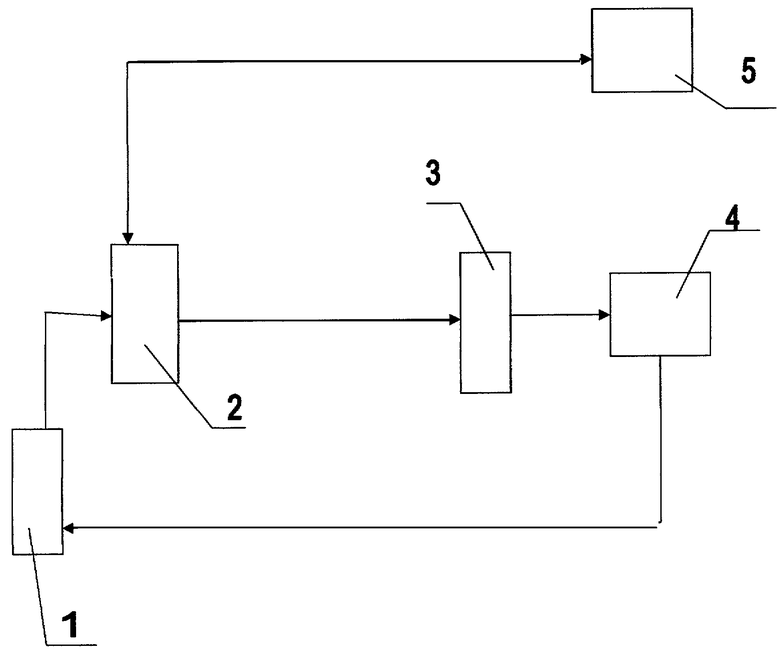
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные блок 1 датчиков (БД), электронный блок 2 управления ГТУ (БУД), блок 3 управления ВНА КВД (БУВНА), гидропривод 4 ВНА КВД, причем гидропривод 4 подключен к БД 1, пульт 5 оператора (ПУ), подключенный к БУД 2.
Устройство работает следующим образом.
Оператор, управляющий ГТУ, с помощью ПУ 5 задает режим работы ГТУ: запуск, холостой ход, номинальный режим, максимальный режим, перегрузочный режим.
работы ГТУ: запуск, холостой ход, номинальный режим, максимальный режим, перегрузочный режим.
Команда оператора от ПУ 5 по цифровому каналу связи (например, RS 485 или Ethernet) передается в БУД 2. БУД 2 в соответствии с полученной от ПУ 5 командой по сигналам датчиков из БД 1 по известным зависимостям (см., например, кн.: Шевяков А. А. «Силовые установки ракетных двигателей и энергетических установок. Системы управления энергетических установок», М., «Машиностроение», 1985) вычисляет потребный расход топлива в камеру сгорания (КС) ГТУ и поддерживает режим работы ГТУ (подробное описание процесса дозирования топлива в КС ГТУ здесь не приводится, т.к. это не имеет прямого отношения к теме заявки на изобретение).
Дополнительно в БУД 2 с помощью БД 1 измеряют частоту вращения ротора КВД и температуру воздуха на входе в ГТУ, по измеренной частоте вращения ротора КВД и температуре воздуха на входе в ГТУ формируют значение приведенной частоты вращения ротора КВД:

где nвдпр - приведенная по температуре воздуха на входе в ГТУ  частота вращения ротора КВД;
частота вращения ротора КВД;
nвд - измеренная в БД 1 частота вращения ротора КВД.
По приведенной частоте вращения ротора КВД и по известной зависимости в БУД 2 формируют заданное положение лопаток ВНА КВД:

где αвна зад. - заданное положение лопаток ВНА КВД;
nвдпр - приведенная по температуре воздуха на входе в ГТУ  частота вращения ротора КВД.
частота вращения ротора КВД.
Пример зависимости αвна зад=f(nвдпр) для ГТЭ-25ПЭР производства ОАО «Авиадвигатель», г.Пермь, представлен в таблице 1.
Далее в БУД 2 заданное положение ВНА КВД сравнивают с измеренным с помощью БД 1 положением лопаток ВНА КВД, по величине рассогласования между заданным и измеренным значениями формируют первое управляющее воздействие на привод лопаток ВНА КВД.
Дополнительно в БУД 2 с помощью БД 1 измеряют частоту вращения ротора КНД, по температуре воздуха на входе в ГТУ и по частоте вращения ротора КНД по наперед заданной зависимости, определяемой расчетно-экспериментальным путем, вычисляют температуру воздуха на входе в КВД:

где  - температура воздуха на входе в КВД;
- температура воздуха на входе в КВД;
 - температура воздуха на входе в ГТУ;
- температура воздуха на входе в ГТУ;
nндпр - приведенная по температуре воздуха на входе в ГТУ частота вращения ротора КНД; определяется по зависимости:

Пример зависимости f(nндпр) для ГТЭ-25ПЭР производства ОАО "Авиадвигатель", г. Пермь, представлен в таблице 2.
Далее в БУД 2 по измеренной с помощью БД 1 температуре воздуха на входе в КВД и по известной зависимости формируют второе значение приведенной частоты вращения КВД

где nвд0 - вторая приведенная по температуре воздуха на входе КВД (за КНД) частота вращения ротора КВД;
 - температура воздуха на входе в КВД, рассчитанная по (3).
- температура воздуха на входе в КВД, рассчитанная по (3).
По второй приведенной частоте вращения КВД и по известной зависимости в БУД 2 формируют второе заданное положение лопаток ВНА КВД

где αвна зад.2 - второе заданное положение лопаток ВНА КВД;
nвд0 - вторая приведенная по температуре воздуха на входе в КВД частота вращения ротора КВД.
Пример зависимости αвна зад.2 =f(nвд0) для ГТЭ-25ПЭР производства ОАО «Авиадвигатель», г. Пермь, представлен в таблице 3.
Далее в БУД 2 сравнивают его с измеренным с помощью БД 1 положением лопаток ВНА КВД, по величине рассогласования между вторым заданным и измеренным значениями положения лопаток ВНА КВД формируют второе управляющее воздействие на привод лопаток ВНА КВД выдают его в БУВНА 3, который с помощью гидропривода 4 обеспечивает требуемое изменение положения лопаток ВНА КВД.
При невозможности из-за отказов в САУ, обнаруживаемых логикой самоконтроля, реализованной в БУД 2, формирования второго управляющего воздействия, БУД 2 осуществляет управление приводом лопаток ВНА КВД по первому управляющему воздействию. При этом информация об отказах выдается из БУД 2 в ПУ 5 на экран монитора оператора.
Таким образом, за счет повышения качества работы САУ обеспечивается повышение точности управления расходом воздуха через КВД и, как следствие, повышение экономичности и надежности работы ГТУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2009 |
|
RU2425996C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2009 |
|
RU2422683C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2010 |
|
RU2435970C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2010 |
|
RU2454557C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2010 |
|
RU2431051C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2010 |
|
RU2431753C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕПУСКОМ ВОЗДУХА В КОМПРЕССОРЕ ДВУХВАЛЬНОГО ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2214535C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2010 |
|
RU2451921C1 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2551142C1 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2555935C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления авиационными газотурбинными двигателями (ГТД) и газотурбинными установками (ГТУ) различного назначения. Сущность изобретения заключается в том, что дополнительно измеряют частоту вращения ротора КНД по температуре воздуха на входе в ГТУ и по частоте вращения ротора КНД по наперед заданной зависимости, определяемой расчетно-экспериментальным путем, вычисляют температуру воздуха на входе в КВД, по температуре воздуха на входе в КВД по известной зависимости формируют второе значение приведенной частоты вращения КВД, по второй приведенной частоте вращения КВД по известной зависимости формируют второе заданное положение лопаток входного направляющего аппарата (ВНА) КВД, сравнивают его с измеренным положением лопаток ВНА КВД, по величине рассогласования между вторым заданным и измеренным значениями положения лопаток ВНА КВД формируют второе управляющее воздействие на привод лопаток ВНА КВД и осуществляют по нему управление приводом лопаток ВНА КВД, при невозможности из-за отказов в САУ формирования второго управляющего воздействия осуществляют управление приводом лопаток ВНА КВД по первому управляющему воздействию. Технический результат изобретения -повышение экономичности и надежности работы ГТУ за счет повышения качества работы САУ, обеспечивающего оптимальное управление расходом воздуха через КВД. 1 ил.
Способ управления газотурбинной установкой (ГТУ), имеющей компрессор низкого давления (КНД) и компрессор высокого давления (КВД), заключающийся в том, что измеряют частоту вращения ротора КВД и температуру воздуха на входе в ГТУ, по измеренной частоте вращения ротора КВД и температуре воздуха на входе в ГТУ формируют значение приведенной частоты вращения ротора КВД, по приведенной частоте вращения ротора КВД по известной зависимости формируют заданное положение лопаток входного направляющего аппарата (ВНА) КВД, сравнивают его с измеренным положением лопаток ВНА КВД, по величине рассогласования между заданным и измеренным значениями формируют первое управляющее воздействие на привод лопаток ВНА КВД, отличающийся тем, что дополнительно измеряют частоту вращения ротора КНД, по температуре воздуха на входе в ГТУ и по частоте вращения ротора КНД по наперед заданной зависимости, определяемой расчетно-экспериментальным путем, вычисляют температуру воздуха на входе в КВД, по температуре воздуха на входе в КВД по известной зависимости формируют второе значение приведенной частоты вращения КВД, по второй приведенной частоте вращения КВД по известной зависимости формируют второе заданное положение лопаток входного направляющего аппарата (ВНА) КВД, сравнивают его с измеренным положением лопаток ВНА КВД, по величине рассогласования между вторым заданным и измеренным значениями положения лопаток ВНА КВД формируют второе управляющее воздействие на привод лопаток ВНА КВД и осуществляют по нему управление приводом лопаток ВНА КВД, при невозможности из-за отказов в САУ формирования второго управляющего воздействия осуществляют управление приводом лопаток ВНА КВД по первому управляющему воздействию.
| ШЛЯХТЕНКО С.М | |||
| Теория авиационных ВРД | |||
| - М.: Машиностроение, 1975, с.411-414 | |||
| Югов O.K | |||
| и др | |||
| Основы интеграции самолета и двигателя | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОТКЛОНЕНИЯ ПАРАМЕТРОВ СИЛОВОЙ ТУРБИНЫ ТУРБОМАШИННОГО АГРЕГАТА ПРИ ВНЕЗАПНОМ ПОЛНОМ ИЛИ ЧАСТИЧНОМ СБРОСЕ НАГРУЗКИ | 2002 |
|
RU2225945C2 |
| RU 2008122803 А, 10.12.2009 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2007 |
|
RU2360137C1 |
| RU 2009103600 А, 03.02.2009 | |||
| US 5761895 A, 09.06.1998 | |||
| US 6321525 B1, 27.11.2001. | |||

