Область техники, к которой относится изобретение
Настоящее изобретение относится к насадке пылесоса, ограничивающей впускное отверстие, для направления всасываемого воздуха через насадку, и к способу чистки пылесосом.
Предпосылки изобретения
Из WO 97/15224 известна насадка, которая оснащена кромкой, проходящей вдоль контура наружного конца впускного отверстия для контакта с поверхностью пола при нахождении в рабочем положении на поверхности пола. Часть кромки способна перемещаться между нижним положением для контакта с поверхностью пола или прохождения рядом с поверхностью пола и верхним положением для образования зазора между частью кромки и поверхностью пола. Устройство для управления кромкой установлено для подъема и опускания части кромки между нижним положением и верхним положением во время хода перемещения насадки по поверхности пола в одном направлении.
Устройство для управления кромкой включает в себя выступ для зацепления с поверхностью пола. Выступ способен перемещаться с возможностью поворота в направлении, обычно параллельном направлению перемещения насадки по поверхности пола между двумя положениями. Выступ соединен с двумя частями кромки на противоположных сторонах контура конца впускного отверстия для удержания поднятой одной из насадок в первом из двух положений и для удержания поднятой другой из насадок в другом из двух положений. Каждый раз начинается ход перемещения насадки по полу в направлении, противоположном предыдущему ходу, силы трения между выступом и поверхностью пола заставляют выступ поворачиваться в другое из двух положений и поднимают другое, приводя одну из частей кромок в верхнее положение. Таким образом, части кромки каждый раз поднимаются в начале хода в новом направлении. Это обеспечивает прохождение более крупных загрязняющих частиц в контур наружного конца впускного отверстия, в то время как задняя кромка скользит по полу, так что насадка не должна подниматься с пола и располагаться над более крупными загрязняющими частицами, чтобы обеспечивать всасывание таких более крупных загрязняющих частиц.
Из WO 01/54555 известна подобная насадка пылесоса. В этой насадке пылесоса силы трения между частями кромки и поверхностью пола вызывают подъем передней части кромки с пола каждый раз, когда начинается ход по полу в новых направлениях, противоположных направлению предыдущего хода.
Недостаток такой известной насадки пылесоса состоит в том, что мелкая пыль и другие загрязняющие частицы, прилипшие к поверхности пола, удаляются с поверхности пола менее эффективно.
Краткое описание настоящего изобретения
Целью настоящего изобретения является создание устройства, которое позволит всасывать более крупные загрязняющие частицы во время чистки пылесосом, не поднимая насадку пылесоса с пола, и в соответствии с которым мелкая пыль и другие загрязняющие частицы удаляются с поверхности пола более эффективно.
В соответствии с одним аспектом настоящего изобретения данная цель достигается посредством создания насадки пылесоса по п.1. Настоящее изобретение также может быть воплощено в способе чистки пылесосом по п.14.
Посредством оставления части кромки в нижнем положении во время части хода и затем во время последней части хода начала подъема в верхнее положение сильно пониженное давление удерживается во время части хода. Таким образом, перепад давления в зазоре между кромкой и поверхностью пола остается относительно высоким, так что скорости воздуха на данном участке остаются относительно высокими, что обеспечивает относительно эффективное засасывание мелкой пыли и других загрязняющих частиц, прилипших к полу. После того как некоторое количество более крупных загрязняющих частиц собралось или может быть собрано у передней части кромки, подъем этой части кромки является достаточным для обеспечения прохождения передней кромки через эти более крупные загрязняющие частицы, так что эти более крупные загрязняющие частицы достигают внутренней части контура наружного конца впускного отверстия и всасываются через впускное отверстие. Следовательно, относительно очень низкое давление внутри наружного конца впускного отверстия и большой перепад давлений в отверстии между кромкой и поверхностью пола становятся возможными, за исключением случая, когда кромка или часть кромки подняты для впуска более крупных загрязняющих частиц.
Конкретные разработки и варианты осуществления настоящего изобретения изложены в зависимых пунктах формулы изобретения.
Дополнительные признаки, эффекты и подробности настоящего изобретения вытекают из подробного описания и чертежей.
Краткое описание чертежей
Фиг.1 изображает вид в разрезе сбоку примера насадки пылесоса в соответствии с настоящим изобретением с кромками, в нижних положениях;
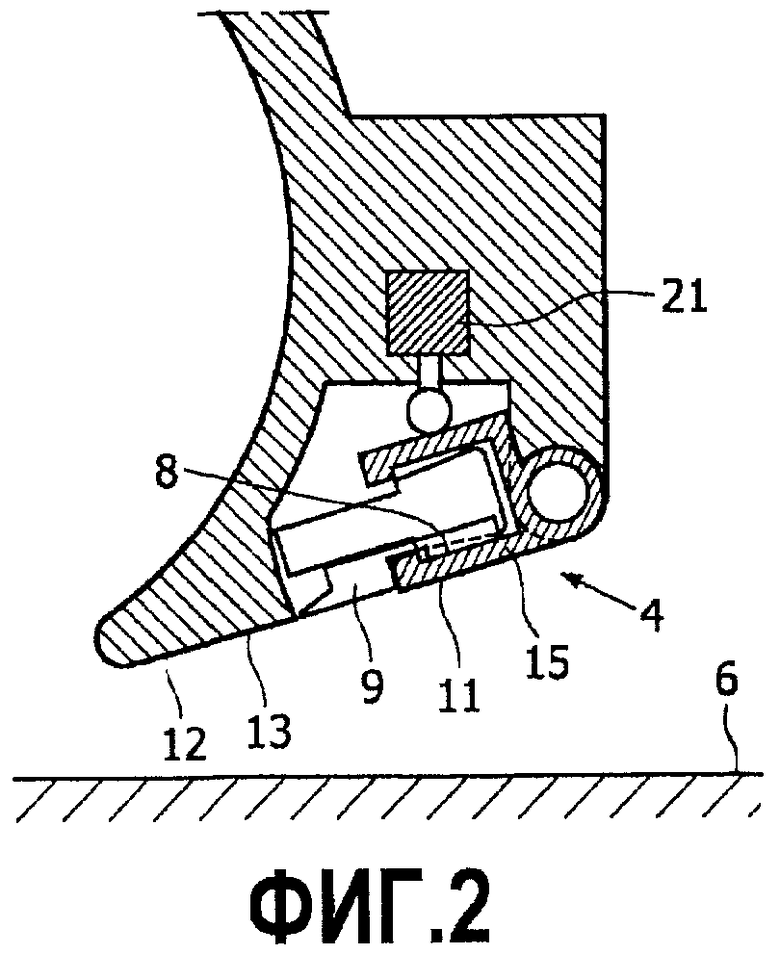
фиг.2 изображает увеличенную часть на фиг.1 с кромкой в верхнем положении;
фиг.3 изображает вид сбоку насадки пылесоса на фиг.1 и 2 с кромками в нижних положениях;
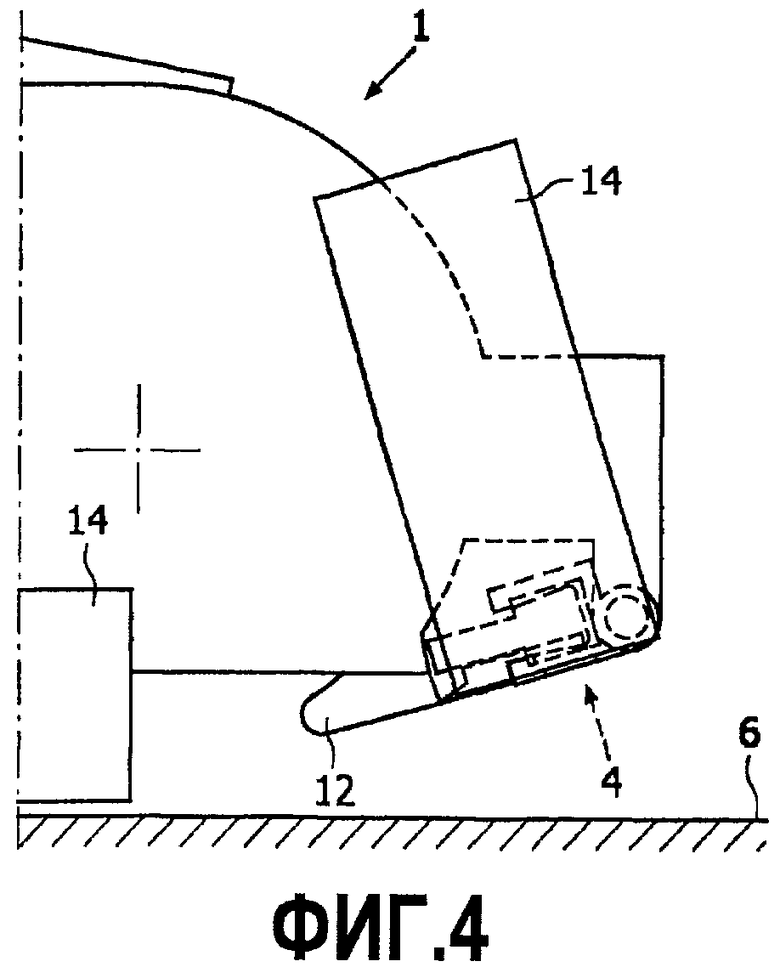
фиг.4 изображает вид сбоку насадки пылесоса на фиг.1-3 с кромкой в верхнем положении;
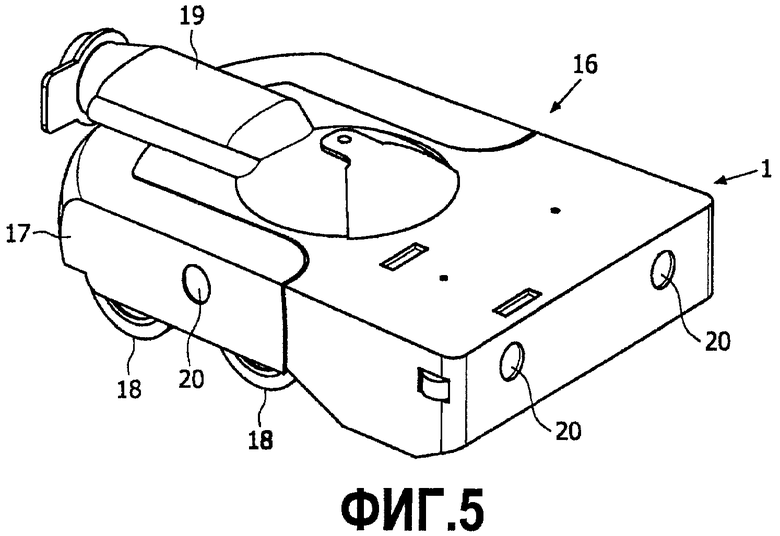
фиг.5 изображает перспективный вид сверху насадки робота-пылесоса;
фиг.6 изображает перспективный вид снизу насадки робота-пылесоса на фиг.5;
фиг.7 изображает вид снизу альтернативного примера всасывающей насадки в соответствии с настоящим изобретением.
Подробное описание вариантов осуществления
Настоящее изобретение в основном описано со ссылкой на пример насадки 1 пылесоса в соответствии с настоящим изобретением, изображенный на фиг.1-4. Такая насадка 1 пылесоса может быть, например, частью робота-пылесоса, узел 18 насадки которого изображен на фиг.5 и 6.
Насадка 1 пылесоса ограничивает впускное отверстие 2 для направления всасываемого воздуха через насадку 1. Всасываемый воздух может перемещаться по направлению, например, к рукаву и/или пылевому мешку в узле корпусе пылесоса через воздуховыпускное отверстие 22. Вращающаяся чистящая щетка 5 расположена таким образом, что наружные концы щетинок щетки проходят во впускное отверстие 2.
Первая часть 3 кромки и вторая часть 4 кромки проходят на противоположных сторонах вдоль наружного контура впускного отверстия 2. Обе части 3, 4 кромки способны перемещаться между нижним положением для контакта с поверхностью 6 пола или проходить рядом с поверхностью 6 пола, как показано на фиг.1 и 3, и верхним положением для образования зазора между частью 4 кромки и полом 6, как показано на фиг.2, 4 и 6.
Устройство для управления кромкой установлено для поднятия части 3, 4 кромки из нижнего положения в верхнее положение. В насадке в соответствии с настоящим примером устройство для управления кромкой выполнено из соленоидов 21, которые соединяются с устройством 23 управления насадкой для регулирования смещений частей 3, 4 кромки между верхним и нижним положениями. Однако вместо соленоидов могут использоваться многие другие типы исполнительных механизмов, таких как электродвигатели или элементы, приводимые в действие посредством селективного создания низкого давления на площади впускного отверстия.
Устройство 21, 23 для управления кромкой также выполнено с возможностью одновременного смещения обеих частей 3, 4 кромки между верхним и нижним положениями для приспособления всасывающей насадки 1 для чистки пылесосом ковров и им подобного. Устройство 21, 23 для управления кромкой может, например, быть выполнено с возможностью действия в соответствии с данными, выдаваемыми датчиком, указывающим тип очищаемой поверхности пола.
Для чистки мягких поверхностей пола, таких как ковры, обе части 3, 4 кромки могут устанавливаться в верхнее положение (фиг.2, 4, 6). Это обеспечивает перемещение всасывающей насадки 1 по направлению к полу 6 относительно приводного устройства 17 узла насадки, так что скользящие поверхности 12 контактируют с поверхностью 6 пола, когда части 3, 4 кромки находятся в верхнем положении. Таким образом, при чистке пылесосом мягкой поверхности пола скользящие поверхности 12 будут, по меньшей мере, частично поддерживать всасывающую насадку.
При чистке пылесосом жестких поверхностей пола, подобных, например, плитке или дереву, обе части 3, 4 кромки устанавливаются в нижнее положение, контактируя с площадью 6 поверхности пола, когда всасывающая насадка 1 находится в рабочем положении на поверхности 6 пола.
При чистке пылесосом поверхности пола обычно проходят по всей поверхности посредством перемещения всасывающей чистящей насадки по поверхности пола в соответствии с картиной перемещения, включающей в себя ряд ходов перемещения, причем каждый ход образован перемещением в заданном направлении. Последующие ходы могут осуществляться обычно в противоположных направлениях, параллельных друг другу, и причем каждый ход незначительно смещается относительно предыдущего хода и частично перекрывает предыдущий ход, но некоторые или все ходы могут осуществляться под другими углами относительно друг друга. Устройство 21, 23 для управления кромкой выполнено с возможностью оставления части 3, 4 кромки в нижнем положении во время части хода и затем во время последней части хода начала подъема части кромки в верхнее положение.
Посредством оставления части 3, 4 кромки в нижнем положении во время части хода и, таким образом, ограничивая отверстие между насадкой 1 и полом 6, через которое воздух может входить во впускное отверстие 2, значительное пониженное давление создается во впускном отверстии 2. Это обуславливает высокую скорость воздушного потока между частями 3, 4 кромки и поверхностью 6 пола и повышает эффект чистки частей 3, 4 кромки, так как пониженное давление присасывает насадку 1 и, таким образом, части 3, 4 кромки к полу 6. Это является выгодным для эффективного удаления мелких загрязняющих частиц и загрязняющих частиц, прилипших к полу. Затем во время последней части хода подъем части 3, 4 кромки в верхнее положение обеспечивает всасывание более крупных загрязняющих частиц во впускное отверстие и увлечение воздушным потоком через выпускное отверстие 22.
Часть или части хода, во время которого части 3, 4 кромки остаются в нижнем положении, предпочтительно включают в себя начальную часть хода, так что во время хода передняя часть из частей 3, 4 кромки поднимается только после того, как появляется вероятность того, что одна или более крупных частиц могли скопиться впереди данной части 3, 4 кромки.
Например, при чистке жесткой поверхности 6 пола во время начальной части хода в направлении, указанном стрелкой 7, обе части 3, 4 кромки находятся в нижнем положении, изображенном на фиг.1. Во время хода загрязняющие частицы, которые являются слишком большими, чтобы пройти под опущенными частями 3, 4 кромки, скапливаются у передней части 4 кромки всасывающей насадки 1 и выталкиваются ею вперед.
Затем во время последней части хода один исполнительный механизм 21 кромки поднимает переднюю часть 4 кромки в верхнее положение, так что образуется зазор между поверхностью 6 пола и частью 4 кромки, обеспечивая прохождение более крупных загрязняющих частиц, которые скопились у передней части 4 кромки во время этого хода, в контур наружного конца впускного отверстия 2, в то время как насадка 1 продолжает перемещаться по полу. Таким образом, временно образуется вход для более крупных загрязняющих частиц посредством поднятия передней части 4 кромки, в то время как задняя часть 3 кромки остается в своем нижнем положении. Насадка 1 не должна подниматься с поверхности 6 пола и располагаться над более крупными загрязняющими частицами, чтобы обеспечить всасывание более крупных загрязняющих частиц, и уменьшенное давление во впускном отверстии 2 возникает только временно, хотя тем не менее более крупные загрязняющие частицы принудительно входят во впускное отверстие 2. В то время как передняя часть 4 кромки находится в своем верхнем положении, другая часть 3 кромки, которая остается в своем нижнем положении, удерживает насадку 1 поднятой, по существу, далеко от поверхности 6 пола, чтобы предотвратить касание скользящими поверхностями 12 пола.
Когда всасывающая насадка 1 перемещается в направлении, противоположном направлению, указанном стрелкой 7, часть 3 кромки будет передней частью кромки и будет частью кромки, которая поднимается, в то время как задняя часть 4 кромки остается в своем нижнем положении.
Предпочтительно устройство 21 для управления кромкой только временно поднимает одну из частей 3, 4 кромки в течение периода времени, достаточного для впуска более крупных загрязняющих частиц, которые скопились у передней части из частей 3, 4 кромки, во впускное отверстие 2, и затем снова опускает для восстановления более высокого уровня пониженного давления для обеспечения эффективного удаления мелкой пыли и других загрязняющих частиц, прилипших к поверхности 6 пола.
Момент, когда начинается подъем передней части 3, 4 кромки, предпочтительно определяется относительно ожидаемого конца хода, например, посредством определения, когда насадка 1 находится на заданном расстоянии от ожидаемого конца хода или посредством определения момента времени, который является заданным периодом времени перед ожидаемым концом хода. В свою очередь, ожидаемый конец хода может, например, быть определен на основании обнаруженного препятствия или изменения типа поверхности пола в данном направлении перемещения всасывающей насадки 1 или может быть определен на основании изменений скорости, при которой перемещается всасывающая насадка 1, причем уменьшение скорости указывает на близкий конец хода.
Таким образом, часть 3, 4 кромки должна быть поднята перед окончанием хода, и чистящая насадка изменяет свое направление движения, например, посредством огибания препятствия или изменения своего направления движения на обратное. Во время хода поддерживается очень низкое давление, в то время как более крупные загрязняющие частицы сначала скапливаются у ведущей части 3, 4 кромки и затем принудительно проходят во всасывающую насадку 1 посредством поднятия передней части 3, 4 кромки только один раз, в конце хода. Если часть 3, 4 кромки поднимается в конце хода, максимальное количество загрязняющих частиц будет уже собрано у передней части 3, 4 кромки, когда уровень пониженного давления в насадке 1 временно падает для обеспечения прохождения более крупных загрязняющих частиц в насадку 1.
Начало подъема передней части 3, 4 кромки может также быть определено относительно начала хода, например, посредством измерения пройденного расстоянии/или истечения конкретного периода времени от начала хода. Ограничение длины части хода, во время которого часть 3, 4 кромки остается в своем нижнем положении, препятствует тому, чтобы слишком много загрязняющих частиц накапливалось впереди всасывающей насадки 1 перед тем, как часть 3, 4 кромки будет поднята, и риск того, что крупные загрязняющие частицы проскользнут в сторону от всасывающей насадки 1 и останутся сзади до того, как часть 3, 4 кромки поднимется, уменьшен.
Кроме того, часть 3, 4 кромки может просто подниматься каждый раз, когда пройдено определенное расстояние или когда проходит определенный интервал времени. Продолжительность поднятия передней части кромки может, например, быть для каждого случая заданным периодом времени и/или пройденным расстоянием перемещения насадки 1 по полу, или процентом от времени или расстояния, пройденного до того, как часть 3, 4 кромки была поднята.
Кроме того, сочетание указанных вариантов управления также возможно. Передняя часть 3, 4 кромки может, например, подниматься каждый раз, когда всасывающая насадка 1 пройдет 2 метра и в конце каждого хода.
Устройство 23 управления может также быть выполнено с возможностью поднятия передней части из частей 3, 4 кромки в ответ на сигнал, вызванный командой подъема кромки от пользователя.
В настоящем примере устройство 23 управления соединено с устройством 25 для управления насадкой робота-пылесоса. Такое устройство для управления насадкой содержит данные, отображающие траекторию, по которой должен следовать узел 16 насадки. Так как в таком устройстве 25 перемещения насадки обычно задаются (по меньшей мере, если не встречается непредвиденное препятствие), то относительно просто определить моменты для поднятия передней части кромки для обеспечения прохождения крупных загрязняющих частиц в насадку 1 таким образом, чтобы более крупные загрязняющие частицы эффективно захватывались, кроме того, время и пройденное расстояние, когда передняя часть кромки поднята, сохраняются очень короткими. Например, так как конец хода известен заранее, передняя часть из частей 3, 4 кромки затем может, например, быть поднята автоматически в течение очень короткого периода времени, но достаточного для захвата накопленных загрязняющих частиц во время последней части каждого хода.
В изображенном примере первая часть 3 кромки или вторая часть 4 кромки каждый раз поднимается полностью. В качестве альтернативы, части кромки могут быть разделены, например, на отдельно поднимаемые части кромки, или кромка может быть гибкой, и устройство для управления кромкой может быть выполнено с возможностью отдельного поднятия частей кромки или кромок.
В примере, изображенном на фиг.1 и 2, часть 3 кромки расположена вдоль первой стороны контура наружного конца впускного отверстия 2, и другая часть 4 кромки расположена вдоль стороны контура наружного конца впускного отверстия 2, противоположной первой стороне. Таким образом, обе части 3, 4 кромки поочередно могут выполнять функцию передней части кромки, если всасывающая насадка 1 перемещается взад и вперед.
Части 3, 4 кромки имеют U-образную форму на виде снизу и также проходят вдоль сторон всасывающей насадки 1. Как лучше всего видно на фиг.3, при нахождении в нижнем положении боковые створки 14 частей 3, 4 кромки проходят вдоль сторон всасывающей насадки 1. Это является благоприятным для получения более высокого давления во впускном отверстии 2 при чистке пылесосом жестких полов. Когда часть 3, 4 кромки находится в своем верхнем положении, изображенном на фиг.4, боковые створки 14 направлены вверх вдоль стороны всасывающей насадки 1. Это обеспечивает эффективное всасывание крупных загрязняющих частиц, накопленных на стенке или проскользнувших в сторону всасывающей насадки 1, во впускное отверстие 2.
Как лучше всего видно на фиг.2, часть 4 кромки шарнирно подвешена и повернута в этом положении внутрь из нижнего положения части 4 кромки, изображенного на фиг.1, в свое верхнее положение. Так как часть 4 кромки поворачивается внутрь при перемещении из своего нижнего положения по направлению к своему верхнему положению, предотвращается перемещение загрязняющих частиц, накопленных у части 4 кромки, от насадки 1, когда часть 4 кромки поднята. Кроме того, предотвращается удержание загрязняющих частиц, прилипших к наружной стороне части 4 кромки, так как часть кромки перемещается от накопленных загрязняющих частиц при подъеме, и во время и после подъема обеспечивается сильный воздушный поток вдоль наружной поверхности части 4 кромки, который является благоприятным для захвата загрязняющих частиц, прилипших к наружной стороне части 4 кромки.
В своем верхнем положении часть 4 кромки ориентирована вдоль нижней поверхности всасывающего впускного отверстия 2. Таким образом, всасывающая насадка 1 может оставаться относительно компактной по сравнению с насадкой, вмещающей часть кромки в вертикальном положении.
Часть 4 кромки содержит направляющую поверхность 11, обращенную наружу от насадки 1, когда часть 4 кромки находится в своем верхнем положении. Направляющая поверхность 11 предпочтительно проходит под углом 5-30°, более предпочтительно 10-20°, относительно плоскости, образованной контуром впускного отверстия 2. Внутренний конец направляющей поверхности 11 выступает дальше в направлении, перпендикулярном плоскости, чем наружный конец направляющей поверхности, так что внутренний конец направляющей поверхности 11 находится ближе к поверхности 6 пола, чем наружный конец направляющей поверхности 11, когда насадка 1 находится в рабочем положении. Таким образом, направляющая поверхность 11 части 4 кромки обеспечивает скольжение насадки 1 по особенно крупным загрязняющим частицам подобно лыже, так что такие загрязняющие частицы также надежно достигают впускного отверстия 2. Кроме того, при чистке пылесосом мягких поверхностей с обеими частями кромки в верхнем положении направляющая поверхность 11 обеспечивает скольжение насадки 1 по более крупным загрязняющим частицам и неровностям поверхности.
Часть 4 кромки включает в себя щетку 8 в форме пластинки и пластинку 9, которая является сплошной в ее продольном направлении и проходит вдоль щетки 8. Направляющая поверхность 11 включает в себя поверхность пластинки 9, обращенной от щетки 8, когда часть 4 кромки находится в своем верхнем положении. Пластинка 9 защищает щетку и предпочтительно выполнена из гибкого материала с низким коэффициентом трения для скольжения по загрязняющим частицам и поверхностям пола. Щетка 8 и пластинка 9 удерживаются в держателе 15, и этот держатель также образует часть направляющей поверхности 11 для направления насадки 1 по более крупным загрязняющим частицам, когда часть 4 кромки находится в своем верхнем положении.
Кроме того, направляющая поверхность 13 скользящей пластины 12 для контакта с поверхностью пола, когда вся часть 4 кромки находится в верхнем положении, устанавливается заподлицо с направляющей поверхностью 11 части 4 кромки в ее верхнем положении, таким образом дополняя друг друга и обеспечивая плавное скольжение насадки 1 по более крупным загрязняющим частицам, так что такие загрязняющие частицы надежно всасываются.
Фиг.5 и 6 иллюстрируют, каким образом насадка 1, изображенная на фиг.1-4, может быть встроена в самоходный с автоматическим управлением узел 16 насадки пылесоса. Такой узел насадки является частью робота-пылесоса контейнерного типа, включающего в себя самоходный с автоматическим управлением всасывающий узел вентилятора и узел рукава (оба из которых не показаны). Пример робота-пылесоса, оснащенного узлом насадки, соединенным со всасывающим узлом вентилятора через рукав, раскрыт в международной заявке на патент WO 02/074150.
Узел 16 насадки робота-пылесоса содержит приводное устройство 17, содержащее привод и колеса 18 для приведения в движение и управления направлением движения. В изображенном варианте осуществления приводное устройство 17 расположено на заднем конце роботизированного чистящего узла 16 насадки, в то время как всасывающая насадка 1 расположена на переднем конце.
Впускное отверстие 2 и части 3, 4 кромки всасывающей насадки 1 изображены на виде снизу, проиллюстрированном на фиг.6 Части 3, 4 кромки изображены в своих верхних положениях, а боковые створки 14, изображенные на фиг.3 и 4, не показаны. Соединительная трубка 19 рукава проходит от всасывающей насадки 1 к задней стороне роботизированного чистящего узла 16 насадки для соединения воздуховыпускного отверстия 22 всасывающей насадки 1 с одним концом узла рукава (не показан).
Роботизированный узел 16 насадки содержит датчики 20 для обеспечения информацией о границах и препятствиях в его окрестности. Кроме того, датчики 20 могут, например, использоваться для определения типа поверхности, которую чистят, и т.д. Датчики соединяются с устройством 25 для управления насадкой (фиг.1).
Данные относительно окрестности могут передаваться в устройство 25 для управления насадкой для обработки и планирования маршрута. Например, для чистки прямоугольной площади пола устройство управления роботом-пылесосом может на основании данных, полученных от датчиков 20, планировать схему перекрывающихся ходов, параллельных границы поверхности, формируя траекторию, по которой будет перемещаться роботизированный узел 16 насадки, и определяя, где должна быть поднята передняя часть кромки. Предпочтительно составление карты и планирование выполняется узлом всасывающего вентилятора (также содержащим датчики), и этот узел затем посылает соответствующие сигналы управления в узел насадки пылесоса.
Так как роботизированный всасывающий узел 16 насадки часто шире всасывающей насадки 1, многие роботы-пылесосы не могут пылесосить, например, стену. Всегда будет оставаться небольшая площадь вдоль стены, которую нельзя пропылесосить. В альтернативном варианте осуществления в соответствии с настоящим изобретением части кромки вдоль стороны всасывающей насадки могут независимо перемещаться. Например, при перемещении по траектории, почти параллельной стене, часть кромки, обращенная к стене, может подниматься для обеспечения дополнительной всасывающей силы для всасывания загрязняющих частиц, находящихся на площади за пределами непосредственной зоны досягаемости всасывающей насадки.
В качестве альтернативы или дополнительно, когда всасывающая насадка 1 завершает ход с передней частью 3, 4 кромки, обращенной к стене, подъем части 3, 4 кромки перед достижением конца хода предотвращает проталкивание загрязняющих частиц на площадь за пределы зоны досягаемости всасывающей насадки 1. Кроме того, удержание части 3, 4 кромки в верхнем положении до конца хода вызывает сильный воздушный поток от стены к впускному отверстию 2 вдоль пола 6, который обеспечивает всасывание значительной части загрязняющих частиц, находящихся около стенки, во впускное отверстие 2.
Кроме того, датчики 20 узла 16 насадки робота-пылесоса могут, например, также использоваться для нахождения заранее более крупных загрязняющих частиц, так что часть 3, 4 кромки может подниматься перед достижением загрязняющих частиц, предотвращая перемещение загрязняющих частиц вперед всасывающей насадкой 1, возможно препятствуя управлению и/или сдерживая скорость роботизированного узла 16 насадки перед сбором.
Хотя настоящее изобретение было проиллюстрировано и описано подробно на чертежах и вышеизложенном описании, такая иллюстрация и описание должны рассматриваться пояснительными и примерными, а не ограничивающими, настоящее изобретение не ограничивается раскрытыми вариантами осуществления.
Например, как показано на фиг.7, как показано на виде снизу, части 53, 54 кромки насадки 51, ограничивающей впускное отверстие 52, могут проходить вдоль криволинейной (часть 54 кромки) и/или V-образной (часть 54 кромки) траектории, причем центральный участок части 54 кромки расположен внутрь относительно наружных участков частей 53, 54 кромки. Таким образом, более крупные загрязняющие частицы эффективно удерживаются у передней части 53, 54 кромки, в то время как насадка 51 перемещается во время части хода перед подъемом части 53 и 54 кромки, так что более крупные загрязняющие частицы, зацепляемые частью 53, 54 кромки, остаются впереди насадки 51 и надежно всасываются, когда часть 53, 54 кромки временно поднята. В этом примере части 53 и 54 кромки имеют разные формы для иллюстративных целей. Обычно, будет предпочтительно, чтобы обе части 53, 54 кромки в основном имели одинаковую форму.
Кроме того, возможно каждый раз поднимать всю часть кромки предпочтительно в течение короткого периода времени, если предусмотрена опора, такая как набор колес, которая удерживает насадку поднятой для удержания зазора между насадкой с полностью поднятой частью кромки и полом достаточно широким, чтобы обеспечить прохождение более крупных загрязняющих частиц. Это вызывает относительно большое увеличение перемещения воздуха в единицу времени через впускное отверстие, что является благоприятным для эффективного вовлечения тяжелых загрязняющих частиц через впускное отверстие и может быть осуществлено с помощью более простого устройства для управления кромкой, которое способно поднимать только всю кромку. Также возможно, чтобы только единственная подвижная кромка располагалась вдоль только части контура.
Кроме того, например, возможно, чтобы части кромки в верхнем положении не только образовывали направляющую поверхность, но также выполняли функцию скользящих поверхностей, делая отдельные скользящие поверхности ненужными, для, по меньшей мере, частичного перемещения насадки при чистке пылесосом мягких поверхностей пола.
Кроме того, всасывающая насадка в соответствии с настоящим изобретением также может использоваться без чистящей щетки 5 в качестве части нероботизированного пылесоса или в качестве части робота-пылесоса, в котором насадка пылесоса, корпус и вентилятор объединены в единственный самоходный узел с автоматическим управлением.
Другие изменения в раскрытых вариантах осуществления могут быть понятны и осуществлены специалистами в данной области техники при практическом применении заявленного изобретения на основании изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает другие элементы или этапы и не исключает множественное число. Любые знаки ссылки в формуле изобретения не должны истолковываться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ, В ЧАСТНОСТИ ДЛЯ РОБОТОВ-ПЫЛЕСОСОВ | 2021 |
|
RU2822189C1 |
| НАСАДКА ПЫЛЕСОСА С ОДНОРАЗОВОЙ НАКЛАДКОЙ | 2008 |
|
RU2399363C2 |
| ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ИМ | 2006 |
|
RU2345699C2 |
| НАСАДКА ДЛЯ ПЫЛЕСОСА | 2015 |
|
RU2672501C2 |
| РОБОТ-ПЫЛЕСОС | 2007 |
|
RU2423905C2 |
| ПЫЛЕСОС С ЧИСТЯЩЕЙ ГОЛОВКОЙ | 2003 |
|
RU2312580C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПЫЛЕСОСА | 2018 |
|
RU2728745C1 |
| ЧИСТЯЩАЯ НАСАДКА ДЛЯ ПЫЛЕСОСА | 2002 |
|
RU2281682C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2604456C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2534916C2 |



Настоящее изобретение относится к насадке (1) пылесоса, ограничивающей впускное отверстие (2) для направления всасываемого воздуха через насадку (1). Изобретение направлено на повышение эффективности всасывания более крупных загрязняющих частиц. Насадка (1) содержит кромку (3, 4) вдоль контура наружного конца впускного отверстия (2) для контакта с поверхностью (6) пола при нахождении в рабочем положении на поверхности пола, в которой, по меньшей мере, часть (3, 4) кромки способна перемещаться между нижним положением для контакта с поверхностью (6) пола и верхним положением для образования зазора между частью (3, 4) кромки и поверхностью (6) пола. Устройство (21) для управления кромкой выполнено с возможностью оставления части (3, 4) кромки в нижнем положении во время начальной части хода перемещения насадки по поверхности (6) пола в одном направлении и начала подъема в верхнее положение в последующем, во время последней части хода. 3 н. и 11 з.п. ф-лы, 7 ил.
1. Насадка (1; 51) пылесоса, ограничивающая впускное отверстие (2; 52) для направления всасываемого воздуха через насадку (1; 51), причем насадка (1; 51) содержит: кромку (3, 4; 53, 54) по контуру наружного конца впускного отверстия (2; 52) для контакта с поверхностью (6) пола при нахождении в рабочем положении на поверхности пола, причем, по меньшей мере, часть (3, 4; 53, 54) кромки перемещается между нижним положением для контакта с поверхностью (6) пола или прохождения вблизи поверхности (6) пола и верхним положением для образования зазора или, по меньшей мере, большего зазора между частью (3, 4; 53, 54) кромки и поверхностью (6) пола; и устройство (21) для управления кромкой для подъема и опускания части (3, 4; 53, 54) кромки между нижним положением и верхним положением; при этом устройство (21) для управления кромкой выполнено с возможностью удержания части (3, 4; 53, 54) кромки в нижнем положении во время части хода перемещения насадки по поверхности (6) пола в одном направлении и начала подъема в верхнее положение в последующем, во время последней части хода.
2. Насадка пылесоса по п.1, в которой устройство (21) для управления кромкой выполнено с возможностью определения момента для начала подъема части (3, 4; 53, 54) кромки относительно ожидаемого конца хода.
3. Насадка пылесоса по п.1 или 2, в которой устройство (21) для управления кромкой выполнено с возможностью определения момента для начала подъема части (3, 4; 53, 54) кромки относительно начала хода.
4. Насадка пылесоса по п.1 или 2, в которой устройство (21) для управления кромкой выполнено с возможностью удержания каждый раз части (3, 4; 53, 54) кромки в верхнем положении в течение заданного периода времени или на заданном расстоянии перемещения насадки (1; 51) по полу (5).
5. Насадка пылесоса по п.1 или 2, в которой кромка (3, 4; 53, 54) шарнирно подвешена, причем (3, 4; 53, 54), будучи в верхнем положении, повернута внутрь от нижнего положения кромки (3, 4; 53, 54).
6. Насадка пылесоса по п.1 или 2, в которой в своем поднятом положении кромка (3, 4; 53, 54) имеет направляющую поверхность (11), обращенную наружу от впускного отверстия (2; 52) и проходящую под углом 5-30° относительно плоскости, образованной контуром впускного отверстия (2; 52), причем внутренний конец направляющей поверхности (11) выступает дальше в направлении, перпендикулярном указанной плоскости, чем наружный конец направляющей поверхности (11), так что, когда насадка (1; 51) находится в рабочем положении, внутренний конец направляющей поверхности (11) находится ближе к поверхности (6) пола, чем наружный конец направляющей поверхности (11).
7. Насадка пылесоса по п.6, содержащая скользящую пластину (12) для контакта с поверхностью (6) пола, когда вся кромка (3, 4; 53, 54) находится в верхнем положении, причем скользящая пластина (12) имеет направляющую поверхность (13) на одной линии с направляющей поверхностью (11) кромки (3, 4; 53, 54) в верхнем положении.
8. Насадка пылесоса по п.6, в которой кромка (3, 4; 53, 54) содержит щетку (8) в форме пластинки и пластинку (9), которая является сплошной в ее продольном направлении и проходит вдоль щетки (8), причем, когда кромка (3, 4; 53, 54) находится в верхнем положении, направляющая поверхность (11), по меньшей мере, включает в себя поверхность пластинки (9), обращенную от щетки (8).
9. Насадка пылесоса по п.1 или 2, в которой часть (3, 4; 53, 54) кромки расположена вдоль первой стороны контура наружного конца впускного отверстия (2; 52) и другая часть (3, 4; 53, 54) кромки расположена вдоль стороны контура наружного конца впускного отверстия (2; 52), противоположной первой стороне.
10. Насадка пылесоса по п.9, в которой часть (3, 4; 53, 54) кромки способна перемещаться независимо от другой части (3, 4; 53, 54) кромки.
11. Насадка пылесоса по п.1 или 2, в которой, если смотреть на вид снизу, часть (53, 54) кромки проходит вдоль криволинейной и/или V-образной траектории, причем центральный участок части (53, 54) кромки расположен внутри относительно наружных участков части (53, 54) кромки.
12. Насадка пылесоса по п.1 или 2, в которой, по меньшей мере, одна из частей (3, 4) кромки проходит вдоль стороны всасывающей насадки (1).
13. Робот-пылесос, содержащий самоходный с автоматическим управлением узел (16), содержащий насадку (1; 51) по любому из предыдущих пунктов, устройство (23) для управления узлом, содержащее данные, отображающие направление, определяющее траекторию, по которой будет перемещаться узел (16), и в котором устройство (21) для управления кромкой выполнено с возможностью определения, когда поднимать кромку (3, 4; 53, 54) на основании данных, отображающих направления, определяющие траектории, по которым будет перемещаться узел (16).
14. Способ чистки пылесосом поверхности (6) пола с использованием насадки (1; 51) пылесоса, ограничивающей впускное отверстие (2; 52) для направления всасываемого воздуха через насадку (1; 51), причем насадка (1; 51) содержит кромку (3, 4; 53, 54) вдоль контура наружного конца впускного отверстия (2; 52) для контакта с площадью (5) поверхности пола при нахождении в рабочем состоянии, в котором, по меньшей мере, часть (3, 4; 53, 54) кромки способна перемещаться между нижним положением для контакта с поверхностью (6) пола или прохождения рядом с поверхностью (6) пола и верхним положением для образования зазора или, по меньшей мере, большего зазора между частью (3, 4; 53, 54) кромки и поверхностью (6) пола, при этом согласно способу часть (3, 4; 53, 54) кромки удерживают в нижнем положении во время части хода перемещения насадки по поверхности (6) пола в одном направлении и поднимают в верхнее положение в последующем часть (3, 4; 53, 54) кромки во время последней части хода.
| WO 9715224 A1, 01.05.1997 | |||
| WO 2005074779 A1, 18.08.2005 | |||
| US 5568589 A, 22.10.1996 | |||
| JP 11206641 A, 03.08.1999. |

