Область техники, к которой относится изобретение
Изобретение относится к устройству для очистки, в частности для робота-пылесоса, которое обеспечивает подачу быстропроходящего воздуха из спирального корпуса центробежного вентилятора робота-пылесоса непосредственно на поверхность пола.
Предпосылки изобретения
В категории роботов-пылесосов в настоящее время ведется разработка, которая во многом следует тенденциям в других категориях бытовой техники и фокусируется в первую очередь на обмене данными и использовании элементов так называемого искусственного интеллекта.
Прежде всего, они являются все в большей степени с финансовой точки зрения энергоемкими навигационными системами и применяются для смартфонов, предназначенных для дистанционного управления и контроля работы робота. Некоторые из этих решений, такие как поворотный лазерный дальномер и компьютер, который рассчитывает текущее положение робота-пылесоса на основании измеренных изменений расстояния от объектов в очищаемой области, потребляют примерно такое же количество энергии, что и все другие действия, вместе взятые, в частности приведение в движение ведущего колеса, приведение в движение вентилятора и всех щеток.
Внутренняя часть робота-пылесоса в основном определяется его внешними размерами, которые должны обеспечивать очистку в ограниченных условиях, например, между ножками стульев и под мебелью.
Ограниченная внутренняя область ограничивает размеры элементов, которые должны помещаться в роботе-пылесосе, и, кроме того, большая часть элементов должна находиться в местоположении, определенном функциональными причинами, и даже аккумулятор должен находиться в местоположении, пригодном для балансировки робота. Кроме того, контейнер для сбора очищенных загрязняющих частиц также должен иметь конкретный минимальный объем.
Отсюда следует, что параметры элементов, которые сами участвуют в очистке, являются очень ограниченными и не могут конкурировать с параметрами и источниками энергии обычных пылесосов. Например, для обычного пылесоса, подключенного к сети, нормальная потребляемая мощность составляет 1000 Вт, и создаваемое статическое отрицательное давление составляет около 20000 Па. Для робота-пылесоса потребление электроэнергии вентилятора соответствует около 6-20 Вт и генерирует около 500-2000 Па.
Важным требованием для оптимального всасывания является создание быстрого потока воздуха между кромками всасывающей насадки и поверхностью пола. Желательно, чтобы соединение, через которое проходит воздух, было как можно более узким, и скорость потока была как можно более высокой. Понятно, что в дополнение к размеру соединения ключевым параметром является именно отрицательное статическое давление при конкретной скорости потока, которое способен создавать вентилятор пылесоса, и, следовательно, центробежные вентиляторы, оснащенные диффузором, используются для этой цели для достижения очищающего действия вместе с минимально возможным размером соединения. Это не только очевидная взаимосвязь между поперечным сечением соединения и скоростью потока, принимая во внимание соответствующее отрицательное статическое давление и поток, но важное предположение является необходимостью для уменьшения толщины пограничного слоя на поверхности пола. Однако, обеспечение достаточно узкого соединения является трудным для роботов-пылесосов.
С этим связан тот факт, что существует огромный диапазон размеров примесей, все из которых должны быть удалены с поверхности и перемещены в контейнер для сбора. Это не только пыль, размер которой обычно составляет порядка микрометров, но и органические и неорганические частицы или предметы с размерами порядка десятков миллиметров, с разной плотностью и формами. Листья, крошки, камни, волосы, ворсинки и так называемые пучки пыли, которые представляют собой крупные образования низкой плотности, которые также несут электростатические заряды.
Эти основные требования к роботам-пылесосам в настоящее время удовлетворяются с помощью нескольких технических подходов.
В первом из этих технических подходов робот-пылесос использует пару вращающихся в противоположных направлениях вращающихся подающих щеток с отдельной всасывающей насадкой. Пара щеток, вращающихся в противоположных направлениях, механически удаляет крупные загрязняющие частицы с поверхности пола и использует кинетическую энергию, механически передаваемую загрязняющим частицам, для перемещения их в контейнер для сбора.
За парой щеток расположена узкая всасывающая насадка, образованная парой упругих элементов, которая достигает чуть выше очищаемой поверхности, и всасываемые мелкие загрязняющие частицы пневматически выгружаются в отдельный уплотненный контейнер для сбора.
Это конструктивное исполнение, по общему признанию, учитывает разнообразие типов примесей, но не полностью. Оно не подходит для предметов с большим поперечным сечением и низкой плотностью, таких как, как правило, пучки пыли. Они образуются в больших объемах в углах комнаты и под мебелью, хорошо видны и должны быть удалены. Однако, в случае описанной конструкции возникает проблема, поскольку механические щетки не могут сообщить им достаточную кинетическую энергию из-за их низкого удельного веса, и упомянутые предметы не достигают контейнера для сбора из-за их низкого удельного веса, большого поперечного сечения и высокого аэродинамического сопротивления. Обычно они снова оказываются на полу, и из-за их размера они не могут всасываться в узкую всасывающую насадку. Таким образом, они только перемещаются по полу перед насадкой и разлетаются по нему, когда выходят на ковер.
Другим недостатком являются высокие требования к области для установки всех элементов и необходимость в двух отдельных контейнерах для сбора и, следовательно, неудобное опорожнение контейнеров и длительная очистка. Кроме того, система является сложной, щетки без пыли вращаются, и волосы интенсивно наматываются на щетки и подшипники, которые необходимо удалять как с щеток, так и с их подшипников.
В другом техническом решении используется простая всасывающая насадка. Самая большая проблема с этим конструктивным исполнением связана с техническими характеристиками роботов-пылесосов. В отличие от всасывающей насадки обычного пылесоса, управляемого человеком, робот-пылесос должен иметь конкретный вертикальный габарит, обычно 8 мм для преодоления вертикальных препятствий, таких как ковры, плинтусы и пороги.
Загрязняющие частицы имеют размеры до единиц в мм, и в отличие от известных пылесосов, этот факт должен учитываться всасывающим устройством роботов-пылесосов. Когда человек, пылесосящий пол, видит крошку, он просто поднимает насадку, и затем продолжает снова, располагая насадку на поверхности. Робот-пылесос должен очищать все, что проходит под рамой робота-пылесоса, т.е., все загрязняющие частицы размером в микронах до загрязняющих частиц размером зазора в 8 мм. Конструкция всасывающей насадки и размеры воздушного канала, по которому загрязняющие частицы перемещаются в контейнер для сбора, должны соответствовать этому. На практике это означает то, что минимальный размер всасывающей насадки должен составлять 8 мм, и это также относится к воздушному каналу.
Однако, это означает то, что при таком конструктивном исполнении невозможно достичь высокой скорости потока на поверхности пола вследствие большого поперечного сечения всасывающей насадки, необходимого для поддержания прохождения крупных примесей, и ограниченного объема воздушного потока, который способен подавать вентилятор вследствие низкой потребляемой мощности и размеров. Кроме того, насадки подвергаются сжатию конкретно на противоположной стороне, чем требовалось бы, т.е., на входе передней части насадки в нижней части рамы робота-пылесоса. На поверхности пола обычно достигается скорость потока только 4-5 м/с.
Всасывающая насадка должна быть открыта с передней стороны для обеспечения прохождения крупных примесей, и, таким образом, парадоксально, хотя их объемная доля в общем объеме примесей составляет всего порядка процента, необходимость их очистки делает невозможным создание узкого соединения и, таким образом, достижение высоких скоростей потока, необходимость в их очистке делает невозможным образование узкого соединения и, таким образом, обеспечение высоких скоростей потока, необходимых для удаления мелких частиц пыли. В то же время они составляют большую часть примесей по объему и также гораздо более опасны для здоровья, чем крупные, видимые крошки.
Третий подход к конструктивному исполнению основан на вращающейся щетке, которая расположена во всасывающей секции воздушного канала. Вращающаяся щетка, приводимая в движение электродвигателем, частично изолирована, и воздушный канал с отрицательным давлением воздуха открывается в корпус. За щеткой расположена перегородка, которая проходит непосредственно над поверхностью пола.
Частицы достаточной плотности и размера подхватываются на полу с помощью лопастей щетки, перемещаются к валу щетки и выбрасываются центробежной силой в воздушный канал и далее в контейнер для сбора. Частицы более низкой плотности и мелкая пыль переносятся в контейнер для сбора потоком воздуха, которые частично обтекают щетку и которые всасываются с пола.
Это техническое решение имеет ряд недостатков. Скорость потока воздуха на полу определяется окружной скоростью щетки и лишь незначительно превышает ее вследствие остаточного потока между лопастями щетки и корпусом щетки. Окружная скорость щетки в роботе-пылесосе обычно составляет 2 м/с, при диаметре обычно 40 мм и 17 об/с. В случае механического инструмента эта скорость является достаточной для удаления более крупных загрязнений, но в случае потока воздуха она совершенно недостаточна для отделения загрязнений с поверхности. Поток воздуха в этой конструкции не служит как один из основных инструментов для очистки поверхности, а только как вспомогательное средство для удаления и перемещения мелкодисперсной пыли, передаваемой щеткой, в контейнер для сбора. Это конструктивное исполнение также страдает от наматывания волос на щетку, так как окружающий поток является слишком медленным.
Четвертая возможность известного уровня техники представляет собой решение, которое основано на паре профилированных упругих цилиндров, вращающихся в противоположных направлениях, расположенных во всасывающем воздушном канале, которая в то же время образует всасывающую насадку.
Это решение имеет следующие технические недостатки. Воздушный канал характеризуется резкими изменениями поперечного сечения, что вызывает турбулентный поток вокруг профилированных цилиндров и проблематичным уплотнением профилированных вращающихся цилиндров. При очистке ковров высота зазора робота-пылесоса изменяется вследствие высокой нагрузки на поверхность ведущих колес, и, таким образом, изменяется геометрия всасывающего устройства относительно пола. Профили роликов полностью устанавливаются на поверхности ковра, и в оставшихся отверстиях между роликами и полом происходит дальнейшее увеличение турбулентного потока. Скорость потока в оставшихся отверстиях на полу была измерена при 2 м/с.
Вследствие конструктивного исполнения устройства с небольшими допусками между роликами и валами спутанные волосы являются большой проблемой, которые также забивают каналы между полом и роликами и блокируют поток воздуха.
В документе US6957472B2, в частности, на фигурах 13, 14, 19 и в соответствующих абзац раскрыто:
а) устройство для очистки, в котором
б) между плоской насадкой и отверстием насадки расположена выпуклая поверхность перемещения.
Проблема всех показанных вариантов выполнения заключается в том, что они работают только тогда, когда внешний кожух соприкасается с полом и потоки воздуха с обеих противоположных сторон сопла сбалансированы. Однако при реальной уборке пола существует множество ситуаций, когда насадка должна наклониться. Обычно при уборке удаляется не только мелкая пыль, но и более крупные частицы, которые могут иметь размер в несколько миллиметров, или при прохождении насадки по плинтусу или при переходе между твердым полом и коврами. Во всех этих ситуациях практически неизбежно, что одна сторона насадки соприкасается с полом, а другая приподнята и временно не контактирует с полом. Это приводит к дисбалансу между обоими встречными потоками воздуха. На стороне, которая остается в контакте с полом, поток воздуха связывается с полом, а с другой стороны поток воздуха связывается с закругленным внутренним обтекателем. В конечном итоге это приводит к разбрасыванию грязи по полу, вызванной потоком воздуха, который остается связанным с полом.
Кроме того, проблематично плотно перемещать внешний кожух насадки по полу, особенно по твердому полу из-за опасности поцарапать поверхность пола. На коврах внешний кожух будет создавать сопротивление движению и может исстирать или повредить ворс ковра.
Указанные недостатки полностью устраняются предлагаемым изобретением.
Краткое описание изобретения
Изобретение основано на конструктивном исполнении, целью которого является подача быстропроходящего воздуха из спирального корпуса или, по меньшей мере, одного бокового канала центробежного вентилятора непосредственно к поверхности пола, сущность которого состоит в том, что между плоской насадкой и вращающейся щеткой расположена выпуклая поверхность перемещения.
Плоская насадка выполнена в виде многоканальной насадки между выпуклой поверхностью перемещения и перегородкой с наклоном отверстия многоканальной насадки в диапазоне 20-60° от горизонтальной плоскости, причем высота зазора между выпуклой поверхностью перемещения и полом находится в диапазоне 1-8 миллиметров.
Выпуклая поверхность перемещения за входом плоской насадки продолжается с закругленным подходом и заканчивается приподнятой задней кромкой, которая является частью корпуса вращающейся щетки.
Плоская насадка непрерывно соединена со спиральным корпусом центробежного вентилятора или, по меньшей мере, одним боковым каналом посредством многоканального спрямителя потока воздуха, количество каналов которого соединяется с системой отдельных воздушных каналов, которые заканчиваются на впускном отверстии в многоканальную насадку.
Поперечное сечение многоканальной насадки уменьшается в диапазоне между входом системы отдельных воздушных каналов в многоканальной насадке и входом многоканальной насадки.
Перегородка закруглена к полу от входа многоканальной насадки с максимальной высотой зазора в диапазоне 0,5-2 мм и меньше высоты зазора выпуклой поверхности перемещения в самой нижней точке относительно поверхности пола.
Вращающаяся щетка размещена в корпусе, за которым следует всасывающая секция воздушного канала, которая соединена упругим соединением с корпусом контейнера для сбора.
Вращающаяся щетка размещена в корпусе между всасывающей секцией воздушного канала, которая соединена упругим соединением с корпусом контейнера для сбора, и высокоскоростной частью избыточного давления воздушного канала робота-пылесоса, обтекающей поверхность пола.
Сумма поперечных сечений выпускных отверстий воздушных каналов избыточного давления высокоскоростной части воздушного канала составляет 3-40% от поперечного сечения всасывающей секции воздушного канала.
Устройство для очистки подвешено на параллельных поворотных рычагах, установленных на штифтах, которые установлены с возможностью поворота в выступах, закрепленных на конструкции робота-пылесоса.
Плоский подающий канал или, по меньшей мере, один боковой подающий канал расположен между плоской насадкой и центробежным вентилятором.
Посредством набора воздушных каналов с малым поперечным сечением изобретение обеспечивает достаточный поток при заданной скорости потока, в то время как достаточно низкий гидравлический размер отдельных воздушных каналов создает условия для ламинарного потока. Это минимизирует потери энергии и скорости потока, вызванные турбулентным течением, поток равномерно распределяется по всей выпуклой поверхности перемещения, и, таким образом, устраняются резкие изгибы в каналах и резкие изменения их поперечного сечения.
Узел воздушного канала непрерывно соединяет выпускное отверстие спирального корпуса центробежного вентилятора с соответствующим узлом воздушного канала малого диаметра, таким образом, успокаивая турбулентный поток из выпускного отверстия спирального корпуса центробежного вентилятора. Это обеспечивает плавный физический переход между разными поперечными сечениями и формами выпускного отверстия спирального корпуса и воздушных каналов малого диаметра, а также плавный переход между турбулентным воздушным потоком из выпускного отверстия спирального корпуса центробежного вентилятора и ламинарным потоком в каналах малого диаметра.
Центробежный вентилятор со спиральным корпусом может быть заменен центробежным вентилятором с, по меньшей мере, одним боковым каналом, что является оптимальным способом преобразования кинетической энергии воздуха, которая получена от лопастей вращающегося рабочего колеса, в статическую энергию. Эффективность конструктивного исполнения бокового канала значительно выше при преобразовании кинетической энергии в статическую энергию, чем при использовании спиральных корпусов, при минимизации внешних размеров центробежного вентилятора.
Выпуклая поверхность перемещения подает слой высокоскоростного потока из выпускного отверстия плоской многоканальной насадки на поверхность пола. При наименьшем зазоре до основания проходящий слой высокоскоростного потока изменяет проходящую выпуклую поверхность перемещения к поверхности пола, поскольку изменяется направление перепада статического давления, который прижимает слой высокоскоростного потока к упомянутым поверхностям. Приближение высокоскоростного слоя воздуха к поверхности пола параллельно поверхности пола предотвращает утечку загрязненного воздуха в отличие от наклонного прямого потока воздуха, поскольку кинетическое давление в слое воздуха, проходящем параллельно полу, означает более низкое статическое давление, чем окружающая атмосфера. Следовательно, воздух, загрязненный загрязняющими частицами, не может выходить в окружающую среду.
Известный уровень техники также усовершенствован за счет использования конструктивного исполнения значительно более простой насадки и воздушного канала, которое может представлять собой простую щель, и также за счет использования более простых и дешевых центробежных вентиляторов, которые рассчитаны на более низкие скорости, что уменьшает требования к установке рабочего колеса центробежного вентилятора, его охлаждению и балансировке.
Воздух, быстро проходящий над поверхностью, создает область более низкого статического давления над поверхностью, чем под ней, а именно, например, между волокнами ковра. Это создает желаемое всасывание вверх, которое высвобождает и перемещает загрязняющие частицы из области между волокнами ковра в высокоскоростной поток и далее в контейнер для сбора.
Нежелательное сдувание загрязняющих частиц с поверхности пола, таким образом, предотвращено, если часть или вся выпуклая поверхность перемещения перемещается от пола, например, при пересечении между разными типами напольных покрытий, больше, чем толщина проходящего слоя высокоскоростного потока воздуха. В упомянутых местах поверхности поток вокруг поверхности завершается до задней кромки выпуклой поверхности перемещения, и поток воздуха выпускается в область вращающейся щетки, замедляется и выпускается в контейнер для сбора.
Выпуклая форма поверхности перемещения обеспечивает плавное преодоление выступающих поверхностей, таких как края ковра или дверные пороги, и, следовательно, выпуклая поверхность перемещения может быть расположена непосредственно над полом и высокоскоростным потоком в тонком слое непосредственно над поверхностью, что является энергоэкономичным.
Рабочее расстояние между самой нижней точкой выпуклой поверхности перемещения и поверхностью пола прямо пропорционально вертикальному размеру плоской многоканальной насадки, из которой на выпуклую поверхность перемещения выпускается слой высокоскоростной воздушной струи, и траектории, по которой скорость потока изменяет площадь прохождения. Когда робот-пылесос перемещается по полу в стандартном горизонтальном положении, соединение между выпуклой поверхностью перемещения и поверхностью пола поддерживает свой определенный размер, что гарантирует желаемое изменение поверхностного потока.
Когда выпуклая поверхность перемещения перемещается от поверхности пола дальше, чем соответствует толщине проходящего слоя высокоскоростного потока воздуха, поток выпуклой поверхности перемещения завершен только на задней кромке выпуклой поверхности передачи, определяемой пересечением выпуклой поверхности перемещения и внутренней поверхности корпуса вращающейся щетки, и поток воздуха выпускается в область вращающейся щетки, замедляется и увлекается в контейнер для сбора.
Это перенаправляет поток воздуха от поверхности пола и предотвращает сдувание загрязняющих частиц с поверхности пола и неконтролируемую утечку загрязненного воздуха в атмосферу.
Важным аспектом является взаимосвязь между окружной скоростью вращающейся щетки и скоростью потока, обтекающего выпуклую поверхность перемещения, которая обеспечивается блоком управления. Целью является поддержание динамического баланса с точки зрения механического воздействия вращающейся щетки на загрязняющие частицы и противоположного аэродинамического действия высокоскоростного потока, и поддержание динамического баланса между объемом и скоростью воздуха, выходящего под вращающейся щеткой, и скоростью частиц, ускоряемых вращающейся щеткой к соединению. Точнее, скорость воздуха, выходящего под щеткой, должна снизиться до нуля даже под корпусом робота-пылесоса, и никакие частицы не должны проникать под выпуклой поверхностью перемещения в поток воздуха.
Вращающаяся щетка выполняет функцию выравнивателя скорости потока в ответвлениях с избыточным и низким давлением воздушных каналов. Высокоскоростной поток от выпуклой поверхности перемещения перемещает частицы с поверхности пола, и впоследствии этот воздух, насыщенный загрязняющими частицами, принудительно замедляется во временно образованных камерах между лопастями вращающейся лопасти до скорости во всасывающем ответвлении низкого давления для предотвращения проблем с разностью скоростей потока воздуха в обоих ответвлениях воздушных каналов.
Перегородка с боковыми пластинами, окружающая область за плоской многоканальной насадкой с выпуклой поверхностью перемещения с расстоянием от поверхности пола, меньшим, чем расстояние выпуклой поверхности перемещения от поверхности пола, ограничивает количество воздуха, который может всасываться из окружающей атмосферы в область пониженного давления вследствие высокой скорости потока из плоских насадок и обходить цилиндрическую выпуклую поверхность перемещения.
В то же время уменьшение содержания всасываемого воздуха уменьшает проблему поддержания постоянного объема воздуха и уменьшает замедление и увеличение слоя воздуха, который обтекает цилиндрическую выпуклую поверхность перемещения, что приводит к повышению эффективности очистки поверхности пола.
В то же время перегородка выполнена как вспомогательное средство для обеспечения минимального расстояния между нижней кромкой выпуклой поверхности перемещения и поверхностью пола, таким образом, обеспечивая надлежащую функцию потока воздуха под выпуклой поверхностью передачи.
Все устройство для очистки, включая выпуклую поверхность перемещения, плоскую многоканальную насадку, перегородку с боковыми пластинами, уменьшающую впуск воздуха, вращающуюся щетку с электродвигателем и редуктором, камеру вращающейся щетки с всасывающим воздушным каналом, соединено с корпусом контейнера для сбора упругим переходным элементом и подвешено на параллельных поворотных рычагах, установленных на штифтах на раме робота-пылесоса. Это решение компенсирует изменения зазора до основания робота-пылесоса, которые возникают вследствие разной твердости поверхностей, на которых работает робот-пылесос, т.е., на деревянном полу или мягком ковре. При обычном весе робота-пылесоса обычная разность зазора до основания составляет до 3-4 мм.
Поддержание постоянной заданной высоты зазора на самой нижней кромке выпуклой поверхности перемещения над поверхностью пола важно для обеспечения надлежащей функции перемещения потока воздуха от выпуклой поверхности перемещения к поверхности пола. Это предотвращает чрезмерное трение и нежелательный изгиб лопастей вращающейся щетки, таким образом, защищая электродвигатель и экономя энергию, защищая ковер от чрезмерного износа вследствие вращающейся щетки и помогая навигационным системам, не создавая ненужных ускорений, которые должны определяться навигационными системами роботов-пылесосов.
Центробежный высокоскоростной вентилятор с загнутыми назад лопастями, полузакрытым рабочим колесом и спиральным корпусом создает поток воздуха высокого статического давления даже за счет более низкой скорости потока. Одной из основных идей настоящего изобретения является дифференцированный подход к удалению разных категорий поверхностных загрязнений. Основная роль потока воздуха заключается в удалении тонкодисперсных загрязняющих частиц, для которых лучше всего пригоден высокоскоростной поток. Если принять во внимание типичный размер этих частиц, который измеряется в микрометрах, решающим фактором является не мощность скорости потока или толщина слоя воздуха, проходящего над поверхностью, подлежащей очистке. Следовательно, тонкий слой в диапазоне 1-2 мм является вполне достаточным для удаления упомянутых частиц с поверхности и из области между волокнами ковра.
Краткое описание чертежей
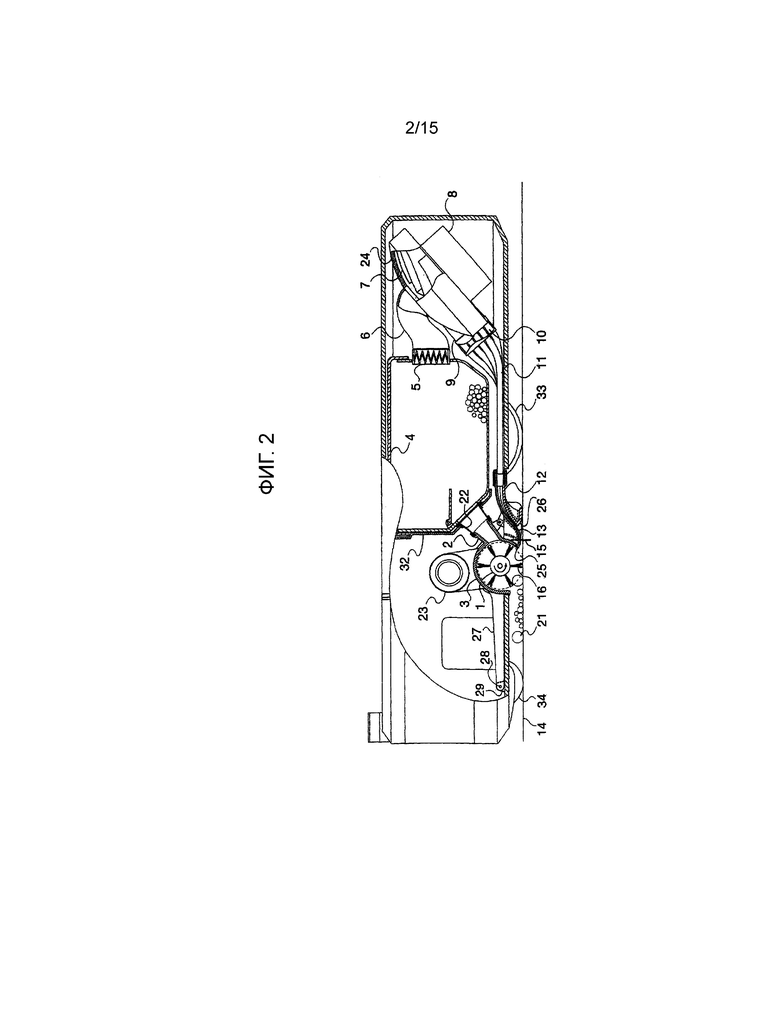
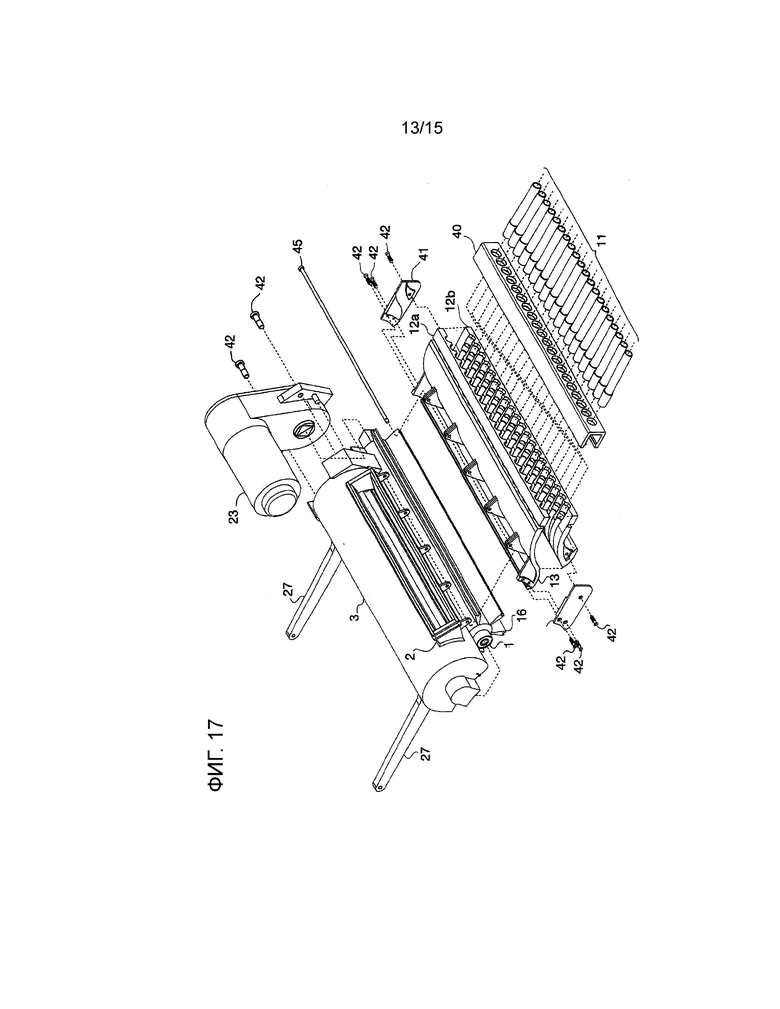
Пример осуществления изобретения показан на сопроводительных чертежах, на которых фиг.1 - частичный разрез робота-пылесоса в аксонометрическом виде, показывающем местоположение ключевых элементов изобретения, фиг.2 - вид в частичном разрезе робота-пылесоса, показывающий положение устройства для очистки, фиг.3 - вид в частичном разрезе робота-пылесоса, указывающий положение устройства для очистки, когда робот-пылесос перемещается по мягкой поверхности, фиг.4 - подробный вид в разрезе устройства для очистки робота-пылесоса с вращающейся щеткой, корпусом вращающейся щетки, плоской многоканальной насадкой, перегородкой с боковыми пластинами и вертикально подвижным шарниром, фиг.5 - подробный вид в разрезе устройства для очистки, указывающий поток воздуха под лопастями вращающейся щетки, фиг.6 - схематичный вид зависимости изменения скорости потока от времени и размера щели под лопастями вращающейся щетки, фиг.7 - вид снизу корпуса робота-пылесоса с указанием направления скорости потока под лопастями вращающейся щетки, фиг.8 - вид спереди робота-пылесоса в горизонтальном рабочем положении, фиг.9 - вид сбоку робота-пылесоса в горизонтальном рабочем положении, фиг. 10 - подробный вид в разрезе устройства для очистки, указывающий поток воздуха в горизонтальном рабочем положении, фиг.11 - вид спереди робота-пылесоса в наклонном, пересекающемся положении, фиг.12 - вид сбоку робота-пылесоса в наклонном пересекающемся положении, фиг. 13 - подробный вид в разрезе устройства для очистки, указывающий поток воздуха в наклонном пересекающемся положении пылесоса, фиг.14 - подробный вариант осуществления устройства для очистки робота-пылесоса при работе на ковре на стадии, когда загрязняющие частицы входят в контакт с вращающейся щеткой, фиг.15 - вид подробного варианта осуществления устройства для очистки робота-пылесоса при работе на ковре на стадии, когда загрязняющие частицы перемещены в область между лопастями вращающейся щетки и корпусом вращающейся щетки, фиг.16 - подробный вид варианта осуществления устройства для очистки робота-пылесоса при работе на ковре на стадии, когда загрязняющие частицы удаляются лопастями вращающейся щетки из области между лопастями во всасывающую секцию, фиг.17 - перспективный вид с пространственным разделением элементов устройства для очистки робота-пылесоса между воздушным каналом и вращающейся щеткой, фиг.18 - вид в частичном разрезе многоканальной насадки, и фиг.19 - перспективный вид с пространственным разделением элементов центробежного регулятора с боковым каналом.
Подробное описание изобретения
Настоящее изобретение относится, в частности, к роботу-пылесосу, содержащему частично герметизированную вращающуюся щетку 1, приводимую в движение электродвигателем 8, который управляется блоком управления в зависимости от потребляемой мощности электродвигателя 8, приводящего в движение центробежный вентилятор 7, всасывающую секцию 2 воздушного канала, соединенную с корпусом 3 вращающейся щетки 1 на одном конце, и которая соединена на другом конце через упругое соединение 22 с корпусом контейнера 4 для сбора загрязняющих частиц, который соединен через воздушный фильтр 5 с впускным воздушным каналом 6 центробежного вентилятора 7, содержащего рабочее колесо 46 с лопастями, которые слегка согнуты назад и приводятся в движение электродвигателем 8. Центробежный вентилятор 7 изолирован в спиральном корпусе 24 с впускным каналом 49 и боковым каналом 47 с воздуховыпускном отверстием 9 и соединен с многоканальным спрямителем 10 потока воздуха, причем количество его каналов соответствует количеству выпускных отверстий, с которым одно и то же количество воздушных каналов 11 с небольшим гидравлическим размером соединено на одном конце, которые находятся на стороне центробежного вентилятора 7, соединенного с многоканальным спрямителем 10 клеевым соединением, и на другом конце они установлены в том же количестве с помощью конического выступа в выемки в верхней части 12a и нижней части 12b в круглой части воздушных каналов плоской многоканальной насадки 12 посредством формирования воздушных каналов, таким образом, образовано соединение с тем же количеством плоских отверстий, которые образуют плоскую многоканальную насадку 12. Стержень 40 с отверстиями, которые служат для прохождения воздушных каналов 11, служит в качестве крышки для соединения верхней части 12a и нижней части 12b плоской многоканальной насадки 12.
В качестве альтернативы, вместо многоканального спрямителя 10 с большим количеством воздушных каналов 11 можно использовать один прямой плоский подающий канал или, по меньшей мере, один боковой подающий канал с большим поперечным сечением для соединения спирального корпуса 24 и плоской насадки, причем это техническое решение обеспечивает также значительно более высокую скорость воздуха на выпуске, чем скорость всасываемого воздуха на впуске.
Спиральный корпус 24 центробежного вентилятора 7 может быть заменен боковым каналом 47 или парой боковых каналов, которые обычно расположены под лопастью рабочего колеса центробежного вентилятора 7. Это экономит место всего устройства и, учитывая размеры центробежного вентилятора 7, достигнуто более высокое статическое давление воздуха на выпуске.
Плоская многоканальная насадка 12, которая показана на фиг.17 и 18, образована верхней частью 12а, которая соединена с возможностью отсоединения стержнем 45 с корпусом 3 вращающейся щетки 1, и нижней частью 12b, которые закрыты сбоку боковыми пластинами 41 и соединены соединительными элементами 42, и соединена с одной стороной выпуклой поверхности 13 перемещения, которая на другом конце пересекает внутреннюю поверхность корпуса 3 вращающейся щетки 1, приводимой в движение приводным электродвигателем 23, и, таким образом, образует приподнятую заднюю кромку 25 выпуклой поверхности 13 перемещения.
Перегородка 26 с боковыми пластинами 41 расположена под плоской многоканальной насадкой 12. Весь узел подвешен на поворотных рычагах 27, которые шарнирно прикреплены посредством штифтов 28 к отверстиям в выступах 29 на корпусе робота-пылесоса.
Принцип рециркуляции воздуха в роботе-пылесосе заключается в поддержании постоянного потока и общего давления во всей системе, но с изменением скоростей потока и аналогичным изменением статического и динамического давлений внутри потока. Воздушные каналы разделены на всасывающую низкоскоростную подсистему, которая содержит корпус 3 вращающейся щетки 1 с самой вращающейся щеткой 1, приводимой в движение электродвигателем 23, и высокоскоростную подсистему избыточного давления, содержащую систему воздушных каналов 11, имеющих небольшой гидравлический размер.
Высокоскоростная подсистема избыточного давления подает высокоскоростной поток в плоскую многоканальную насадку 12, образованную рядом плоских выпускных отверстий, где поток дополнительно ускоряется за счет уменьшения поперечного сечения выпускных отверстий. Кроме того, поток подается по выпуклой поверхности 13 перемещения рядом с очищаемой поверхностью 14 пола. После достижения линии 15 перемещения, где высокоскоростной поток 17 избыточного давления находится ближе всего к поверхности 14 пола, слой 17 высокоскоростного потока избыточного давления имеет большую толщину, чем на входе выпускных отверстий плоской многоканальной насадки 12. Увеличение толщины слоя воздуха при обтекании выпуклой поверхности 36 вызвано нежелательным образом посредством всасывания 18 в область более низкого статического давления, которое сопровождает высокоскоростной поток 17 избыточного давления. Скорость увеличения толщины слоя воздуха прямо пропорциональна длине траектории, по которой проходящий воздух должен перемещаться по выпуклой поверхности 13 перемещения от отверстия плоской многоканальной насадки до линии 15 перемещения, поскольку проходящий слой подвергается воздействию окружающего воздуха по всей длине траектории. Для ограничения такого увеличения разработана перегородка 26 с боковыми пластинами 41, причем боковые пластины 41 ограничивают проникновение окружающего воздуха на поверхность выпуклой поверхности 13 перемещения и, таким образом, ограничивают степень нежелательного всасывания 18 и, таким образом, также увеличение толщины слоя воздуха.
При достижении линии 15 перемещения высокоскоростной поток 17 избыточного давления изменяет обтекаемую поверхность от выпуклой поверхности 13 перемещения до поверхности пола 14, поскольку упомянутая поверхность 14 пола образует в линии 15 перемещения касательную поверхность к выпуклой поверхности 13 перемещения. В то же время в линии 15 перемещения изменяется знак разности статических давлений, действующих на слой высокоскоростного потока.
Упомянутая разность статических давлений возникает из-за того, что на стороне твердой поверхности избыточное давление со стороны спокойной атмосферы воздействует на перемещающийся слой воздуха, характеризуемый более высоким динамическим и более низким статическим давлением, которое прижимает перемещающийся слой к твердой поверхности.
Высокоскоростной поток 17 избыточного давления, увлекающий загрязняющие частицы, обтекает очищаемую поверхность 14 пола против лопастей 16 вращающейся щетки 1, которая вращается с вектором окружной скорости, противоположным в более низкой мертвой точке вектору 17 высокоскоростного потока избыточного давления, причем его скорость в данном поперечном сечении соответствует окружной скорости 5-10% от скорости высокоскоростного потока 17 избыточного давления. Загрязняющие частицы вместе с любыми крупными предметами 21, которые были подхвачены лопастями 16 вращающейся щетки 1, оказываются вместе с перемещающимися в противоположном направлении частицами, увлекаемыми высокоскоростным потоком 17 избыточного давления в сильном турбулентном потоке при контакте высокоскоростного потока 17 избыточного давления с лопастями 16 вращающейся щетки 1 и переносятся вращающейся щеткой 1 между соседними парами лопастей 16 вращающейся щетки 1 во всасывающую секцию 2 воздушного канала и переносятся медленно перемещающимся воздухом в контейнер 4 для сбора загрязняющих частиц, где они останавливаются воздушным фильтром 5.
Пара соседних лопастей 16 вращающейся щетки 1 и внутренняя стенка корпуса 3 вращающейся щетки 1 во время ее вращения образуют временную герметизацию камеры 31 в момент прохождения через корпус 3, где происходит рассеивание кинетической энергии за счет сильной турбулентности и вихреобразования и повышение ее статического давления, так что на входе замедленного турбулентного воздуха 39 в область всасывающей секции 2 воздушного канала поток имеет сопоставимые параметры скорости и давления, которые естественным образом создаются во всасывающей секции 2 воздушного канала центробежным вентилятором 7.
Связь между работой подсистемы избыточного давления и воздушной подсистемы низкого давления означает то, что две воздушные подсистемы не только конструктивно, но и функционально соединены частично герметизированной вращающейся щеткой 1, таким образом, представляя первый аспект синергетического взаимодействия высокоскоростного потока 17 избыточного давления и самой вращающейся щетки 1.
Именно расположение вращающейся щетки 1 с лопастями 16 между всасывающей секцией 2 воздушного канала и высокоскоростным потоком 17 избыточного давления, обтекающим поверхность 14 пола, обеспечивает использование желаемой разности высоких скоростей между потоком низкого давления и потоком избыточного давления.
В предпочтительном варианте осуществления соотношение между скоростью потока на входе плоской многоканальной насадки 12 и скоростью во всасывающей секции 2 воздушного канала составляет 16:1, точнее, скорость потока во всасывающей секции 2 воздушного канала составляет 5 м/с и на входе плоского многоканальной насадки 12 составляет 80 м/с.
Понятно, что без принудительного замедления, которое имеет место внутри корпуса 3 вращающейся щетки 1, скорость не могла бы быть уменьшена на коротких расстояниях между линией 15 перемещения и всасывающей секцией 2 воздушного канала, поскольку естественным образом, т.е., за счет трения между высокоскоростным потоком и окружающей средой для компенсации скорости потребовалось бы расстояние около 500 мм.
Низкая скорость потока во всасывающей секции 2 воздушного канала обусловлена необходимостью достаточной проницаемости всасывающей секции 2 воздушного канала, поскольку все загрязняющие частицы, включая крупные предметы 21, проходящие под корпусом робота, должны иметь достаточно места для безопасного прохождения через всасывающую секцию 2 воздушного канала в контейнер 4 для сбора, который размещен на валу со стенкой 32. В отличие от этого, в случае воздушного канала 11 избыточного давления такого ограничения не существует. По этой причине поперечное сечение воздушного канала 11 избыточного давления или сумма поперечных сечений отдельных воздушных каналов избыточного давления и их выпускного отверстия в плоской многоканальной насадке 12 могут быть уменьшены по сравнению с поперечным сечением всасывающей секции 2 воздушного канала. В предпочтительном варианте осуществления сумма поперечных сечений выпускных отверстий воздушных каналов 11 избыточного давления составляет около 5% от поперечного сечения всасывающей секции 2 воздушного канала. Эффектом является желаемое увеличение скорости потока, которое, несмотря на небольшое замедление во время обтекания выпуклой поверхности 13 перемещения вследствие трения с окружающим воздухом, сопровождаемого турбулентностями 35, положительно влияет на очищающее действие поверхности 14 пола, поскольку высокоскоростной поток создает область пониженного статического давления над поверхностью 14 пола и, таким образом, вызывает желаемое всасывание 19 вверх, которое также высвобождает обычно недоступные загрязняющие частицы из области между волокнами ковра.
Для эффективности очищающего действия также важен угол входа плоской насадки или многоканальной насадки 12, которую он окружает с поверхностью 14 пола. Увеличение этого угла связано с удлинением траектории, по которой воздух должен перемещаться между входом многоканальной насадки 12 и линией 15 перемещения. Скорость воздуха уменьшается вследствие турбулентности 35, и объем всасываемого воздуха и толщина слоя воздуха на линии 15 перемещения увеличиваются вследствие нежелательного всасывания 18.
Верхний предел угла ограничен условием того, что разделение, указанное разделительной линией 37, не происходит до того, как воздух достигнет поднятой задней кромки 25. Это связано с отношением толщины перемещающегося слоя воздуха к радиусу выпуклой поверхности 13 перемещения. Чем ниже это отношение, тем быстрее воздух отделяется от выпуклой поверхности 13 перемещения, и тем ниже является верхний предел угла входа плоской насадки или многоканальной насадки, который он образует с поверхностью 14 пола.
Нижний предел этого угла ограничен двумя факторами. В случае многоканальной насадки 12 отдельные потоки воздуха необходимо объединить в один поток на уровне линии 15 перемещения. Это зависит от длины траектории, размера зазоров между выпускными отверстиями отдельных каналов и формы концов отдельных каналов, которые могут быть выполнены сужающимися или расширяющимися. В случае всех плоских насадок наименьший угол задается тем фактом, что корпус насадки и прилегающая к нему перегородка 26 не представляют собой препятствие для робота-пылесоса, например, при пересечении неровностей или порогов.
Помимо традиционной технической задачи вращающейся щетки 1, которая заключается в сборе более крупных загрязняющих частиц с поверхности 14 пола, постукивании по очищенному полу, особенно по коврам, и перемещению рыхлых загрязняющих частиц во всасывающую секцию 2 воздушного канала, вращающаяся щетка 1 с лопастями 16 в этом предпочтительном варианте осуществления настоящего изобретения служит в качестве замедлителя скорости потока между высокоскоростным потоком из подсистемы избыточного давления, обеспечивающим достаточное очищающее действие, и низкоскоростной всасывающей подсистемой с большим поперечным сечением, обеспечивающей перемещение даже крупных загрязняющих частиц в контейнер 4 для сбора.
Линия 15 перемещения, по которой высокоскоростной поток избыточного давления вокруг выпуклой поверхности 13 перемещения находится ближе всего к поверхности 14 пола и изменяет обтекаемую поверхность от выпуклой поверхности 13 перемещения к поверхности 14 пола, должна быть как можно ближе к вращающейся щетке 1 с лопастями 16, так что максимально возможное количество загрязняющих частиц, высвобождаемых с поверхности 14 пола высокоскоростным потоком избыточного давления, переносятся за счет силы инерции вверх к лопастям 16 вращающейся щетки 1. В частности, частицы высокой плотности при высвобождении с поверхности перемещаются по траектории, подобной баллистической кривой, поскольку скорость потока, приводящая их в движение, быстро уменьшается, хотя она все еще намного превышает скорость этих частиц. Высота зазора выпуклой поверхности 13 перемещения чаще всего находится в диапазоне 1-8 мм и также зависит от вертикального размера плоской насадки, поскольку в случае тонкого слоя воздуха, омывающего выпуклую поверхность 13 перемещения, которая была бы слишком далеко от пола 14, поток воздуха не перемещался бы от выпуклой поверхности 13 перемещения к полу 14, воздух проходил бы к поднятой задней кромке 25, и система не работала бы.
В то же время желательно, чтобы в области между лопастями 16 и линией 15 перемещения скорость потока была как можно выше, так что частицы, механически высвобождаемые лопастями 16 вращающейся щетки 1, отклоняются вверх в область корпуса 3 вращающейся щетки 1 под действием аэродинамической силы, вызванной потоком. Таким образом, предотвращено проникновение упомянутых частиц через щель 20 ниже линии 15 перемещения.
Поскольку расстояние 43 между самым низким уровнем выпуклой поверхности 13 перемещения и самым низким уровнем вращающейся щетки 1 должно быть коротким, скорость высокоскоростного потока 17 избыточного давления намного выше в точке, когда он достигает лопасти 16, чем скорость большинства частиц, высвобождаемых и перемешиваемых этим потоком, и в то же время во много раз превышает скорость потока во всасывающей секции 2 воздушного канала. Для предотвращения обратного потока из всасывающей секции 2 воздушного канала, который возникал бы вследствие большой разности скоростей потока, высокоскоростной поток 17 избыточного давления должен быть замедлен контролируемым способом, приводя к замедленному турбулентному воздуху 39, имеющему скорость, равную или близкую к скорости потока во всасывающей секции 2 воздушного канала. В представленном предпочтительном варианте осуществления настоящего изобретения эта цель достигнута за счет использования лопастей 16 вращающейся щетки 1, как описано выше.
Важной характеристикой для работы робота-пылесоса в соответствии с настоящим изобретением является отношение суммы поперечных сечений выпускного отверстия воздушных каналов 11 высокоскоростной части воздушного канала, которая составляет 3- 40% от поперечного сечения всасывающей секции 2 воздушного канала. Верхний предел этого диапазона возможен при использовании центробежных вентиляторов низкого давления.
Поскольку робот-пылесос работает на полу автономно, он должен быть способен преодолевать вертикальные препятствия, такие как ковры, плинтусы и пороги. Когда робот-пылесос преодолевает препятствие, его очищающие элементы, которые в первую очередь представляют собой вращающуюся щетку 1 и узел 12 плоской многоканальной насадки с выпуклой поверхностью 13 перемещения, изменяют свое положение относительно поверхности 14 пола.
В момент, когда вращающаяся щетка 1 и узел 12 плоский многоканальной насадки с выпуклой поверхностью 13 перемещения подняты, как показано на фиг.11 и 12, полностью или частично над поверхностью 14 пола, так что расстояние между линией 15 перемещения и полом 14 превышает толщину слоя проходящего воздуха, высокоскоростной поток 17 избыточного давления из многоканальной насадки 12, обтекающий выпуклую поверхность 13 перемещения, не изменяет поверхность прохождения до поверхности 14 пола, но обтекает выпуклую поверхность 13 перемещения до приподнятой задней кромки 25, которая направляет поток непосредственно в корпус 3 вращающейся щетки 1. Это предотвращает утечку воздуха в атмосферу и закручивание загрязняющих частиц на поверхности 14 пола.
Перегородка 26 с боковыми пластинами ограничивает нежелательное всасывание 18 воздуха, который всасывается из окружающей атмосферы в область пониженного давления, вызванного высокоскоростным потоком из плоской многоканальной насадки 12 и обтеканием выпуклой поверхности 13 перемещения.
Перегородка 26 с боковыми пластинами 41 охватывает область за выпуклой поверхностью 13 перемещения и характеризуется меньшей высотой зазора, чем соответствует расстоянию линии 15 перемещения от поверхности 14 пола.
Компенсация увеличения объема воздуха вследствие его желаемого всасывания 19 и нежелательного всасывания 18 происходит контролируемым способом путем выхода пульсирующего воздуха 38 за счет периодически создаваемого пульсирующим зазором 44 под лопастями 16 вращающейся щетки 1, так что скорость потока под вращающейся щеткой 1 уменьшается до 0 м/с все еще под корпусом робота-пылесоса. Благодаря тому, что даже внутри этого потока статическое давление ниже, чем в окружающей атмосфере, и поток останавливается под роботом-пылесосом, не может происходить утечка загрязнений в окружающую атмосферу.
Существуют два других аспекта синергического действия между вращающейся щеткой 1 и высокоскоростным потоком 17 избыточного давления.
Первый из них связан с удобством использования вращающейся щетки 1, точнее, с ее окружной скоростью. Чем выше окружная скорость вращающейся щетки 1, тем большее воздействие на загрязняющие частицы и очищающее действие оказывают лопасти 16. Более конкретно, положительное влияние оказывает большее число взаимодействий между лопастями 16 и поверхностью 14 пола в единицу времени, поскольку увеличивается вероятность попадания загрязняющих частиц и интенсивность высвобождения загрязняющих частиц из волокон ковра.
В известном уровне техники роботов-пылесосов скорость вращения вращающейся щетки и, таким образом, ее окружная скорость ограничены, поскольку скорость всасывающего потока по щетки является низкой по ранее описанным причинам, и за щеткой имеется только механическая перегородка, которая должна поддерживать конкретный зазор 30 до основания над поверхностью пола, чтобы не предотвращать перемещение и преодоление роботом вертикальных препятствий.
В настоящем предпочтительном варианте осуществления механическая перегородка заменена пневматическим эффектом вращающегося в противоположном направлении высокоскоростного потока 17 избыточного давления, который полностью уплотняет область между линией 15 перемещения и поверхностью 14 пола. Благодаря описанным средствам уплотнения, таким образом, можно значительно увеличить скорость вращения вращающейся щетки 1 по сравнению с известным уровнем техники. Чем выше скорость высокоскоростного потока 17 избыточного давления, тем более высокая скорость вращения вращающейся щетки 1 может быть использована. То есть, каждое увеличение скорости высокоскоростного потока 17 избыточного давления имеет мультипликативный эффект, поскольку также увеличивается окружная скорость вращающейся щетки 1 и последующее увеличение очищающего действия также увеличиваются.
Второй синергетический эффект относится к воздействию лопастей 16 на частицы, удерживаемые между волокнами ковра. Лопасти 16 ударяют по загрязняющим частицам на поверхности, в частности, на поверхности ковра, с частотой, которая при нормальных скоростях 1000 об/мин и около 17 об/сек соответствует частоте около 100 ударов в секунду в обычной плоской щетке. При такой частоте волокна ковров с захваченными загрязняющими частицами сталкиваются и изгибаются, заставляя их механически высвобождаться, и значительная часть перемещается ближе к поверхности или смещается к поверхности. Затем эти частицы очищаются либо непосредственно, либо вторично высокоскоростным потоком 17 избыточного давления на основании ранее описанных механизмов.
Плоская многоканальная насадка 12, перегородка 26 с боковыми пластинами 41, уменьшающими забор воздуха, выпуклая поверхность 13 перемещения, вращающаяся щетка 1 с электродвигателем 8 и редуктором, корпус 3 вращающейся щетки 1 с ее всасывающей секцией 2 воздушного канала, которая посредством упругого соединения 22 соединена со стенкой 32 корпусов контейнера 4 для сбора, подвешены как одно целое на параллельных поворотных рычагах 27, подвешенных на штифтах 28 на выступах 29 конструкции робота-пылесоса.
Это подвешивание компенсирует изменения зазора до основания робота-пылесоса, которые возникают вследствие разной твердости поверхностей, на которых работает робот-пылесос, таких как деревянный пол или мягкий ковер. При обычной плотности робота-пылесоса обычная разность составляет 3-4 мм.
Положение самовыравнивающейся конструкции на твердой поверхности показано на фиг.2. На твердой поверхности относительное вертикальное положение ведущих колес 33 и вспомогательного колеса 34 относительно самовыравнивающейся конструкции, в частности, относительно вертикального положения лопастей 16, более точно, вертикального положения оси вращающейся щетки 1, где лопасти 16 вращающейся щетки 1, перемещаются вплотную с возможностью скольжения относительно поверхности 14 пола, четко определено, и перегородка 26 с боковыми пластинами имеет высоту зазора около 1 мм над поверхностью 14 пола.
На фиг.3 показано положение упомянутой конструкции на мягкой поверхности, где ведущие колеса 33 и вспомогательное колесо 34 погружены в мягкую поверхность 14 пола, и, следовательно, зазор до основания робота-пылесоса уменьшен. На мягкой поверхности самовыравнивающаяся конструкция, которая подвешена на поворотных рычагах 27, скользит в корпус робота-пылесоса и опирается на поверхность скольжения перегородки 26 и вращающиеся лопасти 16 вращающейся щетки 1, которые погружены примерно на 1 мм ниже поверхности ковра.
Промышленное применение
Настоящее изобретение может быть использовано, в частности, для роботов-пылесосов, целью которых является подача быстро перемещающегося воздуха из спирального корпуса центробежного вентилятора робота-пылесоса непосредственно на поверхность пола.
Список ссылочных позиций
1 вращающаяся щетка
2 всасывающая секция
3 корпус
4 контейнер для сбора
5 воздушный фильтр
6 впускной воздушный канал
7 центробежный вентилятор с радиальным потоком
8 электродвигатель
9 воздуховыпускное отверстие
10 многоканальный спрямитель
11 воздушный канал
12 многоканальная насадка
12a верхняя часть
12b нижняя часть
13 выпуклый участок перемещения
14 пол
15 линия
16 лопасть
17 высокоскоростной поток избыточного давления
18 нежелательное всасывание
19 желаемое всасывание
20 зазор
21 крупные объекты
22 упругое соединение
23 приводной электродвигатель
24 спиральный корпус
25 приподнятая задняя кромка
26 перегородка
27 поворотный рычаг
28 штифт
29 выступ
30 подход
31 камера
32 стенка
33 ведущее колесо
34 вспомогательное колесо
35 турбулентность
36 циркуляция вокруг выпуклой поверхности
37 разделительные линии
38 выходящий пульсирующий воздух
39 замедленный турбулентный воздух
40 стержень
41 боковая пластина
42 крепежные элементы
43 расстояние
44 пульсирующий зазор
45 стержень
46 рабочее колесо
47 боковой канал
49 входной канал.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС | 2007 |
|
RU2423905C2 |
| ВСАСЫВАЮЩАЯ НАСАДКА И ПЫЛЕСОС С ТАКОЙ НАСАДКОЙ | 2005 |
|
RU2300303C2 |
| ЧИСТЯЩАЯ НАСАДКА И СПОСОБ ЧИСТКИ ПЫЛЕСОСОМ | 2007 |
|
RU2436491C2 |
| РОБОТ-ПЫЛЕСОС | 2015 |
|
RU2674707C1 |
| РОБОТ-ПЫЛЕСОС | 2015 |
|
RU2665457C1 |
| РОБОТ-ПЫЛЕСОС | 2015 |
|
RU2668188C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОЛОВ | 2015 |
|
RU2655197C1 |
| РОБОТ - ПЫЛЕСОС | 2015 |
|
RU2669036C1 |
| НАСАДКА ДЛЯ ПЫЛЕСОСА | 2013 |
|
RU2622786C2 |
| ЧИСТЯЩАЯ НАСАДКА ДЛЯ ЧИСТЯЩЕГО УСТРОЙСТВА | 2006 |
|
RU2395224C2 |













Изобретение относится к устройствам для очистки поверхностей, в частности к пылесосам. Устройство содержит расположенную в корпусе вращающуюся щетку с лопастями, соединенную с корпусом вращающейся щетки всасывающую секцию воздушного канала, плоскую насадку. Между плоской насадкой и корпусом вращающейся щетки расположен криволинейный элемент, образующий выпуклую поверхность перемещения, которая соединена с одной стороны с плоской насадкой, продолжается за входом плоской насадки с закругленным подходом к подлежащей очистке поверхности и заканчивается с другой стороны задней кромкой, которая является частью корпуса вращающейся щетки. Повышается эффективность очистки от различного вида загрязнения за счет обеспечения подачи высокоскоростного потока воздуха непосредственно к поверхности пола. 11 з.п. ф-лы, 19 ил.
1. Устройство для очистки поверхности для пылесоса, содержащее расположенную в корпусе (3) вращающуюся щетку (1) с лопастями, соединенную с корпусом вращающейся щетки всасывающую секцию (2) воздушного канала, плоскую насадку (12), при этом между плоской насадкой (12) и корпусом (3) вращающейся щетки (1) расположен криволинейный элемент, образующий выпуклую поверхность (13) перемещения, которая соединена с одной стороны с плоской насадкой (12), продолжается за входом плоской насадки с закругленным подходом к подлежащей очистке поверхности (14) и заканчивается с другой стороны задней кромкой (25), которая является частью корпуса вращающейся щетки (3).
2. Устройство для очистки поверхности по п.1, отличающееся тем, что плоская насадка выполнена в виде многоканальной насадки (12) между выпуклой поверхностью (13) перемещения и перегородкой (26) с наклоном отверстия многоканальной насадки (12) под углом 20-60° к горизонтальной плоскости, причем высота зазора между выпуклой поверхностью (13) перемещения и полом (14) находится в диапазоне 1-8 мм.
3. Устройство для очистки поверхности по предыдущим пунктам, отличающееся тем, что выпуклая поверхность (13) перемещения продолжается за входом плоской насадки с закругленным подходом (30) и заканчивается приподнятой задней кромкой (25), которая является частью корпуса (3) вращающейся щетки (1).
4. Устройство для очистки поверхности по п.1, отличающееся тем, что плоская насадка непрерывно соединена со спиральным корпусом (24) центробежного вентилятора (7) или по меньшей мере с одним боковым каналом центробежного вентилятора посредством многоканального спрямителя (10) воздушного потока, множество каналов которого соединено с системой отдельных воздушных каналов (11), которые заканчиваются на входе в многоканальную насадку (12).
5. Устройство для очистки поверхности по предыдущим пунктам, отличающееся тем, что поперечное сечение многоканальной насадки (12) уменьшается в диапазоне между входом отдельных воздушных каналов (11) в многоканальной насадке (12) и входом многоканальной насадки (12).
6. Устройство для очистки поверхности по п.2, отличающееся тем, что перегородка (26) закруглена к полу (14) от входа многоканальной насадки (12) с минимальной высотой зазора в диапазоне от 0,5 до 2 мм, но меньшей, чем высота зазора для закругленного подхода (30) выпуклой поверхности (13) перемещения в самой нижней точке относительно поверхности (14) пола.
7. Устройство для очистки поверхности по п.1, отличающееся тем, что вращающаяся щетка (1) размещена в корпусе (3), за которым следует всасывающая секция (2) воздушного канала, которая выполнена с возможностью соединения с корпусом (4) контейнера для сбора пылесоса с помощью упругого соединения (22).
8. Устройство для очистки поверхности по п.1, отличающееся тем, что всасывающая секция (2) воздушного канала выполнена с возможностью соединения посредством упругого соединения (22) с корпусом (4) контейнера для сбора пылесоса, причем вращающаяся в корпусе (3) щетка (1) размещена между всасывающей секцией (2) воздушного канала и частью избыточного давления воздушного канала, обтекающей поверхность (14) пола.
9. Устройство для очистки поверхности по п.8, отличающееся тем, что сумма поперечных сечений выпускных отверстий (11) указанной части воздушного канала составляет 3-40% от поперечного сечения всасывающей секции (2) воздушного канала.
10. Устройство для очистки поверхности по предыдущим пунктам, отличающееся тем, что устройство для очистки подвешено на параллельных поворотных рычагах (27), установленных на штифтах (28), которые установлены с возможностью поворота в выступах (29), закрепленных на корпусе пылесоса.
11. Устройство для очистки поверхности по п.1, отличающееся тем, что между плоской насадкой и центробежным вентилятором (7) расположен плоский подающий канал или по меньшей мере один боковой подающий канал.
12. Устройство для очистки поверхности по предыдущим пунктам, отличающееся тем, что пылесос является роботом-пылесосом.
| EP 3512395 A1, 24.07.2019 | |||
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2269920C2 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Устройство для центрирования таза в текстильной машине | 1974 |
|
SU564222A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

