Настоящее изобретение относится к роботу-пылесосу в соответствии с преамбулой п.1 формулы настоящего изобретения. Международная патентная заявка, публикация WO 02/074150, описывает робот-пылесос, содержащий всасывающую насадку, оснащенную вращающейся чистящей щеткой. В роботах-пылесосах использование насадок со щеткой в сочетании с всасыванием представляет особенное преимущество, поскольку это позволяет обеспечить тщательный сбор загрязняющих частиц при низком потреблении энергии на квадратный метр.
Однако использование щеток влечет за собой износ поверхности пола, особенно если поверхностью пола является поверхность ковра, что является причиной более быстрого ухудшения внешнего вида по сравнению только с обычным износом.
Целью настоящего изобретения является, по меньшей мере, уменьшение отрицательного влияния чистки роботом-пылесосом на внешней вид покрытия пола и особенно ковра.
Для достижения данной цели согласно настоящему изобретению создан робот-пылесос согласно п.1 формулы изобретения.
Посредством уменьшения частоты и интенсивности чистки щеткой в соответствии с расстоянием до границы очищаемой пылесосом поверхности пола отрицательное влияние на внешний вид, обусловленное чисткой щеткой, уменьшается особенно эффективно и с минимальным отрицательным влиянием на тщательность удаления загрязняющих частиц.
Во-первых, области покрытия пола непосредственно вдоль границ обычно изнашиваются очень мало в результате обычного износа. Следовательно, систематическая чистка роботом-пылесосом фактически является единственной причиной износа на этих участках, делая износ, вызванный чисткой робота-пылесоса, относительно заметным на этих участках. Кроме того, загрязняющие частицы стремятся прилипнуть в меньшей степени к участкам поверхности пола непосредственно вдоль границ, чем к центральным участкам поверхностей пола, по которым чаще всего ходят, таким образом, обычно требуется меньше чистки щеткой непосредственно вдоль границ поверхности пола.
Во-вторых, в зависимости от конструкции всасывающей насадки и пылесоса меньшие или большие неочищенные щеткой участки поверхности пола остаются вдоль границ очищаемой пылесосом поверхности пола. Это, обычно, вызвано наличием препятствий непосредственно над полом, таких как мебель или радиаторы, обусловленных сложными формами границ и/или конструкцией пылесоса. Даже при использовании передвижной всасывающей насадки, соединенной с остальной частью автономного пылесоса через гибкий шланг, как например, раскрыто в международной патентной заявке WO 02/074150, которая может быть относительно небольшого размера и, следовательно, способна проходить под большей частью предметов, устройства, необходимые для удержания щетки, препятствуют чистке поверхности щеткой поверхности пола вплотную к контуру площади основания всасывающей насадки, оставляя неочищенную щеткой зону вдоль границы очищаемой пылесосом поверхности пола, где поверхность пола ограничена предметом, выступающим вверх от пола, таким как плинтус. Разница в износе ковра относительно разделительной линии между очищенными и неочищенными щеткой участками вдоль границ поверхности пола делает износ, обусловленный чисткой роботом-пылесосом, особенно заметным также на этих участках.
Таким образом, посредством селективного уменьшения частоты и/или периодичности чистки щеткой участков пола непосредственно, по меньшей мере, вдоль одной границы очищаемой пылесосом поверхности пола, износ, обусловленный чисткой роботом-пылесосом, уменьшается там, где он больше всего заметен, и там, где уменьшенное воздействие щеткой относительно мало влияет на тщательность удаления загрязняющих частиц.
Отмечено, что US 5 621 291 описывает робот-пылесос в соответствии с преамбулой п.1., в котором система управления расположена для управления пылесосом на расстоянии, параллельном границе поверхности пола и удержания заданного расстояния до стенки или границы.
Конкретные варианты осуществления настоящего изобретения изложены в зависимых пунктах формулы изобретения.
Дополнительные аспекты, результаты и детали настоящего изобретения изложены в подробном описании ниже со ссылкой на примеры, некоторые из которых проиллюстрированы на схематических чертежах и на которых
Фиг.1 - перспективный вид спереди примера робота-пылесоса в соответствии с настоящим изобретением;
фиг.2 - перспективный вид нижней поверхности всасывающей насадки пылесоса с фиг.1;
фиг.3 - схематическое представление выбранных компонентов пылесоса, изображенного на фиг.1 и 2;
фиг.4 - схематический вид сверху всасывающей насадки, приближающейся к стенке; и
фиг.5 - схематический вид сверху всасывающей насадки, перемещающейся вдоль стенки.
В данном описании ссылка сделана на чертежи, на которых подобные элементы обозначены подобными ссылочными позициями.
В предпочтительном варианте осуществления в соответствии с настоящим изобретением, изображенном на фиг.1, автономный пылесос 1 содержит основной корпус или платформу 2 управления и отдельную всасывающую насадку 3, соединенные друг с другом через узел 4 шланга. Поскольку всасывающая насадка 3 и платформа 2 управления являются двумя отдельными модулями, то всасывающая насадка 3 может иметь относительно небольшой размер. Следовательно, всасывающая насадка 3 может проходить под большей частью предметов, таких как мебель или радиаторы. Другие варианты осуществления автономных пылесосов в соответствии с настоящим изобретением также возможны, например, вариант осуществления, в котором всасывающая насадка и платформа управления встроены в один модуль или в котором соединение всасывающей насадки 3 выполнено относительно платформы 2 управления через шарнир.
Фиг.3 представляет схематическое изображение возможной компоновки выбранных компонентов пылесоса, изображенных на фиг.1 и 2. Поток информации между компонентами обозначен стрелками.
Основной корпус 2 автономного пылесоса содержит источник 30 питания, вакуумную систему 31, систему 32 привода, систему 28 управления и датчики 29. В настоящем варианте осуществления всасывающая насадка 3 содержит систему 33 привода, всасывающий узел 34 и датчики 14, 15, 16, 17.
Система 28 управления включает микропроцессор, память, интерфейсы и датчики 29 и установлена для выполнения перемещения, картографирования окружающей среды, управления и отслеживания положения платформы 2 управления и всасывающей насадки 3 на основании информации, обеспечиваемой датчиками 14, 15, 16, 17, 29 и памятью, а также одним или более способами локализации или алгоритмами. Система 28 управления также может управлять задачами и распределять задачи, например, в виде календаря.
Стрелки на фиг.3 иллюстрируют пример потока информации между различными элементами автономного пылесоса. Система 28 управления принимает информацию с датчиков 29 на платформе 2 управления и с датчиков 14, 15, 16, 17 на всасывающей насадке 3. Эта информация используется системой 28 управления для управления приводом 32 платформы управления, приводом 33 всасывающей насадки 3, вакуумной системой 31 и всасывающим узлом 34. Эта информация может, например, отображать расстояние до границы, к которой приближается всасывающая насадка 3, и количество загрязняющих частиц, собранных с очищаемой поверхности пола. Затем система 28 управления использует информацию для соответствующего направления систем 32, 33 приводов по траектории, предотвращающей столкновение с предметом, и регулирования мощности чистки вакуумной системы 31 и всасывающей системы 34 в соответствии с количеством загрязняющих частиц на очищаемой поверхности пола.
Как видно, фиг.3 является упрощением варианта осуществления в соответствии с настоящим изобретением, изображающая только некоторые из элементов и только указывающая один из возможных потоков информации между этими элементами. Эти элементы также могут быть распределены любым другим пригодным способом между платформой 2 управления и всасывающей насадкой 3 или в любом другом пригодном варианте осуществления в соответствии с настоящим изобретением. В альтернативных вариантах осуществления можно, например, оснастить всасывающую насадку 3 частью системы 28 управления в виде процессора, который мог бы получать информацию с датчиков 29, расположенных на платформе 2 управления. В еще одном варианте осуществления основная часть системы 28 управления, например, процессор и память, могла бы быть расположена на стационарной базовой станции, и информация могла бы передаваться по беспроводной связи во вспомогательную систему управления на платформе 2 управления и/или всасывающей насадке 3.
Камера или камеры могут быть установлены в качестве первичных датчиков 29, например, по одному в каждом углу платформы 2 управления для получения информации, например, об окружающих ее границах. Другие варианты осуществления могут использовать гидролокационные, радиолокационные, лидарные и инфракрасные датчики в дополнении к оптическим датчикам или вместо них. Система 28 управления может использовать датчики 29 для расположения всасывающей насадки 3 и управлять ее перемещениями во время работы. В предпочтительном варианте осуществления всасывающая насадка 3 используется с датчиками 14, 15, 16, 17 для получения информации об окружающих ее границах. Кроме того, датчики могут использоваться для определения типа поверхности, которая очищается, количества загрязняющих частиц, находящихся на поверхности и т.д.
Узел 4 шланга соединяет вакуумную систему на платформе 2 управления с всасывающим узлом всасывающей насадки 3 и, таким образом, всасывающую насадку 3 с платформой 2 управления. Узел 4 шланга может быть оснащен проводами, соединяющими элементы на платформе 2 управления с элементами на всасывающей насадке 3, например, соединяя источник 30 питания с системой 33 привода для приведения в движение всасывающей насадки или соединяя датчики 14, 15, 16, 17 с системой 28 управления. Такие провода могут проходить внутри или снаружи узла шланга или быть встроены в стенку шланга. В другом варианте осуществления кабели могут быть связаны в один основной кабель, который проходит отдельно от узла 4 шланга между всасывающей насадкой 3 и платформой 2 управления.
Источник 30 питания автономного пылесоса может содержать перезаряжаемые батареи, топливные элементы или другие автономные источники питания. Батареи, например, могут повторно заряжаться автономно при помощи пылесоса 1, соединяющегося со станцией загрузки, соединенной с электросетью или пользователем, соединяющим пылесос через шнур питания со стенной розеткой. Однако пылесос также может быть приспособлен для электропитания от сетевой розетки во время работы.
Как платформа 2 управления, так и всасывающая насадка 3 оснащены системой 32, 33 привода для перемещения. Такая система привода может содержать один или более электродвигателей, соединенных с одним или более ведущими колесами 5, 10, 12, колесами 7, 11, 13 или, например, трелевочными щитами для поддержания нагрузки модулей, и электронные схемы для приведения в движение электродвигателя. Датчики, например, встроенные в электродвигатели ведущих колес, могут собирать данные, такие как обороты колес или ведущей оси, для обеспечения информацией системы 28 управления с целью определения фактического движения и скорости. Платформа 2 управления варианта осуществления, изображенного на фиг.1, оснащена двумя ведущими колесами 5, расположенными в задних углах (только одно изображено на чертеже), и одним колесиком, расположенным под соединением 6 шланга на передней стороне платформы 2 управления. Всасывающая насадка 3 также содержит два ведущих колеса 10, 12 и два колесика 11, 13. Управление модулями может осуществляться при помощи системы 28 управления, вращающей два ведущих колеса 5, 10, 12 с разной скоростью или даже в разном направлении, таким образом, поворачивая платформу 2 управления или всасывающую насадку 3 вокруг вертикальных осей. Этот способ управления подобен способу, при помощи которого управляется танк. Другие решения также возможны и известны в технике.
Вакуумная система на платформе 2 управления автономного пылесоса 1 содержит электрический вентилятор для генерации всасывающей силы и мешок или контейнер для сбора пыли и мусора. Воздушный поток, генерируемый электрическим вентилятором, проходит через узел 4 шланга из всасывающего отверстия 8 всасывающего узла 34 во всасывающей насадке 3 в мешок или контейнер на платформе 2 управления. В дополнении к электрическому вентилятору автономный пылесос 1 также имеет всасывающую насадку 3, содержащую приводную или чистящую щетку 9, обеспечивая тщательный сбор загрязняющих частиц при низком потреблении энергии на квадратный метр и, таким образом, увеличивая диапазон автономного пылесоса 1. Чистящая щетка 9 является особенно эффективной при чистке пылесосом ковров и ковриков. При чистке пылесосом других поверхностей, таких как деревянные или каменные поверхности, система 28 управления может уменьшать скорость вращения щетки 9 или даже ее отключать.
В предпочтительном варианте осуществления в соответствии с настоящим изобретением всасывающий узел 34 всасывающей насадки 3 содержит чистящую щетку 9, приводимую в действие электродвигателем для повышения эффективности сбора пыли. Помимо использования отдельного электродвигателя для вращения чистящей щетки 9, например, также можно использовать воздушный поток через всасывающую насадку для соединения щетки с системой 33 привода или использовать стационарную щетку.
Как показано на фиг.2, цилиндрическая щетка 9 расположена во всасывающем отверстии 8 всасывающей насадки 3. Ввиду ее цилиндрической формы только часть щетки выступает из корпуса всасывающей насадки 3 для контакта с полом во время работы всасывающей насадки 3. Как можно отчетливо видеть на фиг.2, контур участка, на котором цилиндрическая щетка может касаться пола, меньше площади основания всасывающей насадки 3 и отстоит от контура площади основания всасывающей насадки 3. Это является эффективным для предотвращения рассеивания загрязняющих частиц в окружающую среду, которые завихряются щеткой 9. Однако, как проиллюстрировано на фиг.4 и 5, это влечет за собой то, что щетка 9 не может чистить поверхность пола вплотную к границе 18, 19 очищаемой пылесосом поверхности 20, 21, если поверхность ограничена поверхностью конструкции 22, 23 на уровне выше пола, которой касаются всасывающей насадкой 3, такой как плинтус или радиатор. В результате остается узкая полоска 24, 25 очищаемой пылесосом поверхности 20, 21 вдоль таких границ 18, 19, которая никогда не чистится щеткой. Соответственно износ, обусловленный чисткой щеткой, не произойдет на этих узких полосках 24, 25. При этом износу все же подвергаются соседние участки очищаемой пылесосом поверхности 20, 21, который становится относительно заметным.
Кроме того, на участках поверхностей 20, 21 пола непосредственно вдоль границ, таких как стенки, ходят не так часто, как на других участках поверхностей 20, 21 пола, так что чистка роботом-пылесосом является фактически единственной причиной износа на поверхностях, расположенных вплотную к таким границам и, соответственно, более заметным, чем на других поверхностях. Кроме того, поскольку по поверхностям 20, 21 пола непосредственно вдоль границ, образованных конструкциями 22, 23, выступающими от пола, такими как стенки, обычно, не ходят так часто, как на остальном участке поверхностей 20, 21 пола, загрязняющие частицы на участках, расположенных вплотную к таким границам, обычно, не попадают при хождении на ковры и им подобное в той же степени, как на другие поверхности, и, следовательно, меньше нужно чистить щеткой для удаления загрязняющих частиц с этих поверхностей при чистке пылесосом, даже при относительно низкой всасывающей силе, обычно используемой роботами-пылесосами.
При использовании пылесоса в соответствии с настоящим вариантом осуществления степень, при которой следы износа становятся визуально заметными на участках ковров и им подобных непосредственно вдоль границ, образованных конструкциями над полом, уменьшается, особенно, эффективно без отрицательного влияния на эффективность чистки или с относительно небольшим отрицательным влиянием на эффективность чистки. Система управления уменьшает интенсивность чистки щеткой при приближении всасывающей насадки 3 к границе очищаемой пылесосом поверхности 20, 21, образованной препятствием. В настоящем варианте осуществления это достигается посредством уменьшения скорости вращения щетки 9 в зависимости от расстояния до препятствия, так что щетка вращается медленнее, когда всасывающая насадка находится рядом с препятствием.
Износ непосредственно вдоль границ, таких как границы 18, 19, уменьшается особенно эффективно, поскольку щетка 9 не приводится в движение, когда всасывающая насадка находится в контакте с границей. При условии, что, по меньшей мере, в такой ситуации щетка 9 способна свободно вращаться в соответствии с перемещениями всасывающей насадки 3 для свободного качения по полу, к тому же износ, обусловленный перемещениями всасывающей насадки 3 относительно пола 20, 21, уменьшается на поверхностях, на которых такой износ обычно становится относительно заметным.
Например, когда всасывающая насадка 3 приближается к препятствию, датчики 16, 17 подают сигнал в систему управления о том, что всасывающая насадка 3 приближается к препятствию. На заданном расстоянии, обозначенном положением A на фиг.4, система управления начинает постепенно уменьшать скорость вращения щетки 9 до тех пор, пока щетка 9 не перестанет вращаться, когда всасывающая насадка 3 перемещается в положение B рядом со стенкой 22.
В другом примере, изображенном на фиг.5, траектория всасывающей насадки 3 проходит параллельно контуру конструкции 23. Когда всасывающая насадка 3 перемещается вдоль траектории, обозначенной стрелкой 26, в контакте со стенкой 23 или очень близко к стенке, система управления управляет электродвигателем для приведения в движение щетки 9, так что щетка 9 не приводится в действие. Когда всасывающая насадка 3 перемещается вдоль соседней (перекрывающей) траектории, обозначенной стрелкой 27, электродвигатель для приведения в движение щетки 9 переключается для приведения в движение щетки 9 при более высокой скорости и когда всасывающая насадка перемещается по третьей соседней траектории, скорость вращения щетки снова может быть установлена более высокой. Этот процесс может повторяться до тех пор, пока щетка 9 не будет приведена в действие при нормальной рабочей скорости, таким образом, обеспечивая постепенный градиент износа от границы 19 к поверхностям, более удаленным от границы. Крутизна градиента может быть зафиксирована, установлена вручную или определена автоматически в соответствии с общим размером комнаты или в соответствии с данными о сборе загрязняющих частиц, запоминаемыми во время более ранних циклов чистки пылесосом.
В настоящем варианте осуществления степень, с которой образование видимых следов делает износ относительно заметным, также снижается посредством уменьшения износа, обусловленного чисткой щеткой по направлению к границам очищаемой пылесосом поверхности 20, 21 пола при условии, что частота, при которой участок очищаемой пылесосом поверхности 20, 21 пола очищается щеткой, уменьшается ближе к тому участку, который находится около границы 18, 19, образованной препятствием для всасывающей насадки 3 над полом.
В настоящем варианте осуществления это достигается при условии, что система управления включает память для запоминания карты очищаемой пылесосом поверхности пола и траекторий, по которым перемещается всасывающая насадка. Система управления расположена для направления всасывающей насадки 3 таким образом, что первое минимальное расстояние удерживается между границей 18, 19 и всасывающей насадкой 3 во время первого цикла чистки, и второе минимальное расстояние, отличное от первого минимального расстояния, удерживается между границей 18, 19 и всасывающей насадкой 3 во время второго цикла чистки.
Однако также могут использоваться другие решения для уменьшения частоты чистки щеткой в зависимости от расстояния до границы очищаемой пылесосом поверхности, такие как уменьшение количества повторных прохождений по поверхности во время цикла чистки ближе к участку, который находится около границы, уменьшение перекрытия между последовательными, предпочтительно обычно взаимно параллельными траекториями на участке ближе к участку, который находится около границы, или увеличение относительной частоты, при которой прохождение вдоль траектории пропускается ближе к участку, который находится около границы.
Предпочтительно пылесос также содержит датчик для определения типа пола, соединенный с устройством управления, для определения типа поверхности, которая чистится, и система управления предпочтительно расположена для регулирования частоты или интенсивности контакта между чистящей щеткой и поверхностью пола в зависимости от расстояния до границы очищаемой пылесосом поверхности пола только в ответ на сигнал от датчика для определения типа пола, указывающего заданный тип поверхности пола или один из заданной группы типов поверхности пола. Это обеспечивает уменьшение воздействия щеткой для уменьшения износа только там, где поверхность пола чистится пылесосом, где износ, обусловленный чистящим действием щетки, обычно становится заметным спустя некоторое время.
В настоящем варианте осуществления датчики 16, 17 также включают датчики для определения типа пола, так что не нужны дополнительные датчики для распознавания типа пола. С этой целью датчики 16, 17 выполнены в виде камер. Как вариант, также могут использоваться другие типы видеосистем.
Также можно использовать сопротивление, испытываемое чистящей щеткой 9, как индикацию типа очищаемого пола.
Специалисту в данной области техники будет понятно, что в рамках настоящего изобретения, как изложено в формуле изобретения, возможны многие другие варианты осуществления по сравнению с указанными вариантами осуществления, интенсивность чистки щеткой, например, может изменяться посредством изменения контактного давления между щеткой и полом или, если движение щетки осуществляется под действием воздушного потока, интенсивность чистки щеткой, например, может изменяться посредством изменения положения щетки в воздушном потоке. Также возможны другие конфигурации пылесосов, например, пылесос, в котором всасывающая насадка и модуль вентилятора жестко соединены или полностью встроены, или конфигурация, содержащая третий отдельный модуль для управления перемещением, который может находиться снаружи модуля вентилятора и/или всасывающей насадки и может взаимодействовать с модулем вентилятора и/или всасывающей насадки посредством беспроводной связи.




Настоящее изобретение относится к роботам-пылесосам и направлено на уменьшение повреждения покрытия пола. Робот-пылесос, содержащий систему управления, выполненную с возможностью регулирования, по меньшей мере, частоты или интенсивности контакта между чистящей щеткой его всасывающей насадки (3) и каждым очищаемым щеткой участком очищаемой поверхности (20) пола, так что, по меньшей мере, для некоторых очищаемых щеткой участков поверхности (20) пола, расположенных в непосредственной близости от, по меньшей мере, одной из границ образованных конструкцией, выступающей из поверхности пола или находящейся над ней (18) очищаемой пылесосом поверхности (20, 21) пола, по меньшей мере, частота или интенсивность контакта между чистящей щеткой и каждым из участков поверхности пола уменьшается при уменьшении расстояния от, по меньшей мере, одной границы очищаемой пылесосом поверхности (20) пола. 9 з.п. ф-лы, 5 ил.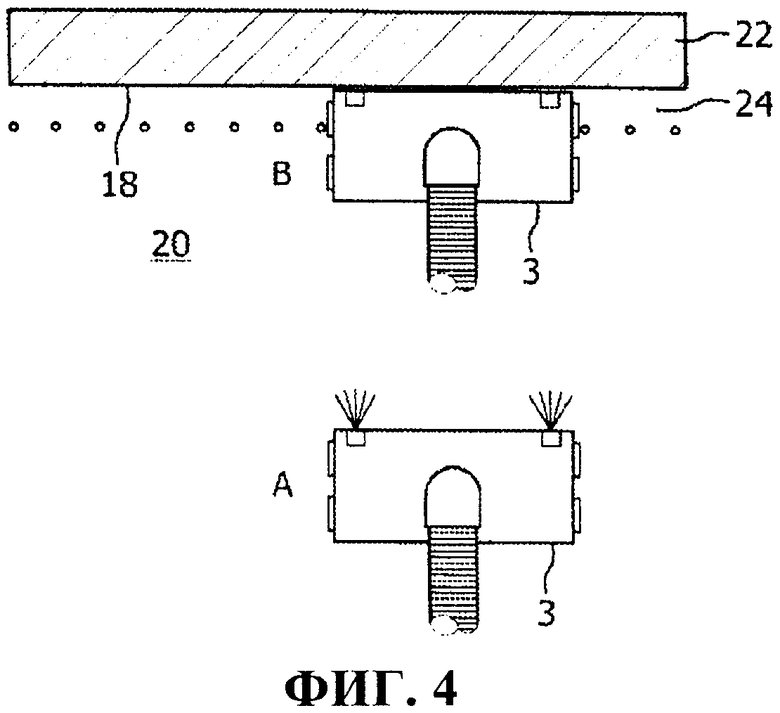
1. Робот-пылесос, содержащий всасывающую насадку (3) с чистящей щеткой (9), контактирующей с поверхностью (20, 21) пола; устройство (10, 11, 12, 13) привода и управления направлением перемещения для обеспечения мобильности и управляемости, по меньшей мере, всасывающей насадки (3); по меньшей мере, один датчик (14, 15, 16, 17) для определения границ (18, 19) очищаемой пылесосом поверхности (20, 21) пола; и систему (28) управления, связанную с, по меньшей мере, одним датчиком (14, 15, 16, 17) и с устройством (10, 11, 12, 13) привода для перемещения всасывающей насадки (3) по очищаемой пылесосом поверхности (20, 21) пола, причем система управления выполнена с возможностью регулирования, по меньшей мере, частоты или интенсивности контакта между чистящей щеткой (9) и каждым участком очищаемой щеткой поверхности (20, 21) пола, так что, по меньшей мере, для некоторых участков поверхности пола, расположенных в непосредственной близости от, по меньшей мере, одной из границ (18, 19) очищаемой пылесосом поверхности (20, 21) пола, по меньшей мере, частота или интенсивность контакта между чистящей щеткой (9) и каждым из участков поверхности пола уменьшается при уменьшении расстояния, по меньшей мере, до одной границы (18, 19) очищаемой пылесосом поверхности (20, 21) пола, и при этом система (28) управления выполнена с возможностью автоматического уменьшения интенсивности контакта между чистящей щеткой (9) и поверхностью пола, когда расстояние до, по меньшей мере, одной границы (18, 19) очищаемой пылесосом поверхности (20, 21) пола ниже, по меньшей мере, одного заданного значения, отличающийся тем, что чистящая щетка (9) выполнена с возможностью приведения в движение во всасывающей насадке (3), и система (28) управления выполнена с возможностью регулирования скорости вращения чистящей щетки (9) для уменьшения скорости вращения, когда расстояние до, по меньшей мере, одной границы (18, 19) очищаемой пылесосом поверхности (20, 21) пола ниже, по меньшей мере, одного заданного значения, при этом, по меньшей мере, одна граница образована конструкцией, выступающей из поверхности поли или находящейся над ней.
2. Пылесос по п.1, в котором система (28) управления выполнена с возможностью постепенного уменьшения скорости вращения щетки (9) до тех пор, пока щетка больше не будет приводиться в движение, когда всасывающая насадка (3) перемещается в положение, примыкающее к, по меньшей мере, одной границе (18, 19) очищаемой пылесосом поверхности (20, 21) пола.
3. Пылесос по п.1, в котором система (28) управления выполнена с возможностью управления электродвигателем для прекращения приведения в действие чистящей щетки (9), когда расстояние до, по меньшей мере, одной границы (18, 19) очищаемой пылесосом поверхности (20, 21) пола ниже, по меньшей мере, одного заданного значения.
4. Пылесос по любому из пп.1-3, в котором чистящая щетка (9) выполнена подвешенной для контактирования с поверхностью (20, 21) пола с регулируемым контактным усилием, направленным вниз, и система (28) управления выполнена с возможностью принудительного уменьшения усилия, направленного вниз, когда расстояние до, по меньшей мере, одной границы (18, 19) очищаемой пылесосом поверхности (20, 21) пола ниже, по меньшей мере, одного заданного значения.
5. Пылесос по п.1, в котором всасывающая насадка (3) имеет площадь основания с контуром площади основания, и чистящая щетка (9) сформирована и подвешена для чистки щеткой на участке для чистки щеткой, имеющем контур участка для чистки щеткой, причем контур участка для чистки щеткой расположен внутри контура площади основания и отстоит от контура площади основания.
6. Пылесос по п.1, в котором система (28) управления выполнена с возможностью постепенного уменьшения интенсивности контакта между чистящей щеткой (9) и поверхностью (20, 21) пола в соответствии с изменением расстояния, по меньшей мере, до одной границы (18, 19) очищаемой пылесосом поверхности (20, 21) пола.
7. Пылесос по п.1, дополнительно содержащий датчик для определения типа пола, соединенный с устройством управления, для определения типа очищаемой поверхности, и система управления выполнена с возможностью регулирования, по меньшей мере, частоты или интенсивности контакта между чистящей щеткой (9) и поверхностью пола, так что, по меньшей мере, для участков поверхности пола, расположенных в непосредственной близости к, по меньшей мере, одной из границ очищаемой пылесосом поверхности (20, 21) пола, частота или интенсивность контакта между чистящей щеткой (9) и поверхностью пола уменьшается в соответствии с расстоянием до, по меньшей мере, одной границы очищаемой пылесосом поверхности (20, 21) пола, только в ответ на сигнал от датчика для определения типа пола, указывающий на заданный тип поверхности пола или на один из заданной группы типов пола.
8. Пылесос по п.7, в котором, по меньшей мере, один датчик (16, 17) для определения границ (18, 19) очищаемой пылесосом поверхности (20, 21) пола также является датчиком для определения типа пола.
9. Пылесос по п.1, в котором, по меньшей мере, один датчик (16, 17) для определения границ (18, 19) очищаемой пылесосом поверхности (20, 21) пола является видеосистемой.
10. Пылесос по п.1, в котором система (28) управления включает в себя память для запоминания карты очищаемой пылесосом поверхности (20, 21) пола и траекторий, по которым перемещается всасывающая насадка (3), причем система (28) управления выполнена с возможностью перемещения всасывающей насадки (12) таким образом, что во время каждого цикла чистки всасывающая насадка (12) перемещается по множеству последовательных траекторий (26, 27) всасывающей насадки, проходящих по очищаемой поверхности (20, 21); первое минимальное расстояние сохраняется, по меньшей мере, между одной границей (18, 19) и всасывающей насадкой (3) во время первого цикла чистки; и второе минимальное расстояние, отличное от указанного первого минимального расстояния, сохраняется между, по меньшей мере, одной границей (18, 19) и всасывающей насадкой (3) во время второго цикла чистки.
| US 5621291 А, 15.04.1997 | |||
| DE 10346216 В3, 09.09.2004 | |||
| Стационарный прибор для продувки напором струи насыщенного пара трубной решетки огневой коробки и труб паровозного котла | 1956 |
|
SU106904A1 |
| СПОСОБ ПОЛУЧЕНИЯ МИНЕРАЛЬНОГО ВЯЖУЩЕГО | 1993 |
|
RU2074150C1 |
| FR 2851058 A1, 13.08.2004 | |||
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2004 |
|
RU2273865C1 |

