Настоящее изобретение относится к машине и способу для сгибания заготовок, используемых для изготовления подгузников/пеленок.
Изобретение может особенно успешно использоваться для изготовления подгузников/пеленок в виде панталон.
УРОВЕНЬ ТЕХНИКИ
Подобный способ, описанный в ЕР 1726278, включает подачу плоских заготовок друг за другом на первое аспирационное колесо или ролик, остановку первого, т.е. заднего, участка или части заготовки, расположенного на всасывающей поверхности сзади (относительно направления вращения первого колеса), и одновременно постепенное отведение второго, переднего, участка или части заготовки, расположенного впереди относительно указанного направления вращения, от аспирационной поверхности при помощи второго аспирационного колеса или ролика.
Ролики вращаются непрерывно вокруг своих осей, причем второй ролик вращается по существу с касанием первого ролика.
Когда задняя часть заготовки перемещается на первом аспирационном ролике, ее передняя часть переносится вторым аспирационным роликом на третий аспирационный выходной ролик, который вращается непрерывно и по существу касается и второго, и первого ролика в том месте машины, где осуществляется сгибание или прессование.
При вращении первого и третьего роликов две части или половины заготовки постепенно приближаются друг с другом, образуя V-образный профиль, и заготовка складывается пополам при прохождении через точку касания контакта первого и третьего роликов.
Несмотря на то что этот способ очень прост, он имеет один явный недостаток при работе машины на высоких скоростях.
Важно, что первый и третий ролики вращаются в противоположных направлениях и имеют одинаковую окружную скорость в точке их касания.
Аналогично, первый и второй ролики тоже вращаются в противоположных направлениях и имеют одинаковую окружную скорость в точке их касания, где передняя половина заготовки отделяется от первого ролика.
Из этого следует, что второй и третий ролики должны вращаться в одном и том же направлении, так что в точке их касания они будут поворачиваться друг от друга.
Это затрудняет перенос, в особенности переход самой передней части заготовки со второго ролика на третий ролик, несмотря на то, что в момент переноса всасывающее средство второго ролика будет выключено.
Кроме того, во время операции сгибания заготовки путем наложения ее второй части на первую один конец заготовки остается какое-то время между вторым роликом и третьим роликом, подвергаясь действию силы волочения и вытягивания.
Помимо этого, указанная сила, действуя на часть заготовки, находящуюся в точке касания второго и третьего роликов, может вызвать также пластическую деформацию всего участка заготовки, проходящего от точки касания до указанного выше места сгибания.
На практике деформации, вызванные волочильной и тянущей силой, часто могут приводить к неточному совмещению второй и первой частей заготовки, что также негативно отражается на последующих операциях сваривания или пайки, которым будут подвергаться согнутые заготовки подгузников/пеленок.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание способа и машины для сгибания заготовок, используемых для изготовления подгузников/пеленок, которые позволяют сгибать заготовки просто и с особой аккуратностью и точностью.
Эти цели достигнуты с помощью машины для сгибания заготовок подгузников/пеленок, описанной в формуле изобретения.
Цели изобретения также достигаются с помощью способа сгибания заготовок подгузников/пеленок, описанного в формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее изобретение будет описано более подробно со ссылками на чертежи, на которых:
фиг.1 схематично изображает предпочтительный вариант выполнения машины согласно изобретению, показанной частично;
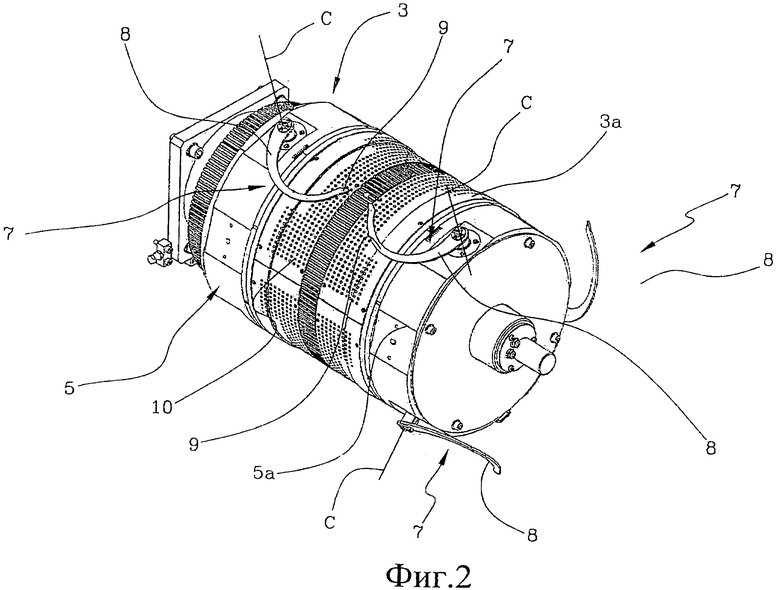
фиг.2 - часть машины, показанной на фиг.1, в аксонометрии и
фиг.3-7 изображают другую часть машины, показанной на фиг.1, в последовательных рабочих положениях.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На чертежах цифровой позицией 1 обозначена вся машина для сгибания и окончательного формирования подгузников/пеленок, в частности подгузников/пеленок в виде панталон.
Подгузник/пеленка этого типа, к которому относится настоящее изобретение, обозначен/обозначена на чертежах буквой Р и схематично показан/показана на фиг.1. Он/она содержит закрытый пояс, который может быть эластичным и к которому прикреплен подбитый клин шагового шва с отверстиями для ног.
Подгузник Р получен из заготовки 2 в виде двойной буквы Т (приведена только в качестве примера). В частности, заготовка 2 представляет собой продольную центральную полосу, соединяющую две поперечные полосы.
Машина 1 содержит первый транспортер 3, при помощи которого заготовки 2 перемещаются по одной друг за другом ко второму транспортеру 4.
В предпочтительном варианте, показанном на чертежах, первый транспортер 3 и второй транспортер 4 состоят из соответствующих роликов 5 и 6, вращающихся вокруг параллельных осей А и В соответственно, причем ролики по существу касаются друг друга в точке Т.
Ролики 5 и 6 вращаются в противоположных направлениях с одинаковой угловой скоростью, а их касательные скорости в точке Т касания тоже одинаковы.
Машина 1 также содержит удерживающие средства 7, связанные с первым транспортером 3 и предназначенные для контакта с каждой заготовкой 2 на промежуточном участке, чтобы разделить заготовку 2 на заднюю (первую) часть 2а и переднюю (вторую) часть 2b, если смотреть в направлении вращения ролика 5.
Как будет видно из последующего описания, первая часть или первая половина 2а заготовки 2 удерживается на первом транспортере 3, а вторая часть или вторая половина 2b отделяется от первого транспортера 3 и переносится на второй транспортер 4.
Удерживающие средства 7 включают несколько удерживающих элементов 8, расположенных на одинаковых угловых расстояниях друг от друга по окружности цилиндрической поверхности ролика 5.
Как показано на фиг.2, каждый удерживающий элемент 8 состоит из двух дугообразных рычагов 8а и 8b, установленных симметрично на наружной цилиндрической поверхности 5а ролика 5 на его противоположных концах. Каждый рычаг 8а и 8b установлен с возможностью поворота относительно ролика 5 вокруг соответствующей оси С, по существу перпендикулярной к наружной поверхности 5а. Удерживающие элементы 8 могут поворачиваться вокруг своих осей С при помощи подходящего привода (не показан).
Удерживающие элементы 8 могут поворачиваться между первым положением, в котором они не имеют контакта с заготовкой 2, и вторым положением, в котором они находятся над заготовкой и имеют контакт с ее промежуточным участком, что позволяет удерживать заготовку, по меньшей мере частично, на первом транспортере 3.
В первом положении удерживающие элементы 8 полностью находятся снаружи относительно наружной поверхности заготовки 2.
Во втором положении удерживающие элементы 8 размещаются на центральной части 2с заготовки 2, так что по меньшей мере эта часть остается на первом транспортере 3.
Кроме того, первый транспортер 3 и второй транспортер 4 содержат всасывающие средства, каждое из которых соединено с источником отрицательного давления (не показан). С помощью всасывающих средств заготовки 2 удерживаются на поверхностях транспортеров.
Всасывающие средства создают частичный вакуум через наружную поверхность 3а первого транспортера 3 и через наружную поверхность 4а второго транспортера 4.
Как показано на фиг.2, частичный вакуум поступает через отверстия 10 в наружной поверхности 3а первого транспортера 3. Аналогично, частичный вакуум поступает через отверстия (не показаны) в наружной поверхности 4а второго транспортера 4.
Всасывающие средства могут приводиться в действие по выбору, в соответствии с положением каждой заготовки 2 на первом транспортере 3 и/или на втором транспортере 4.
Машина 1 содержит также расположенный между первым транспортером 3 и вторым транспортером 4 механизм 11 переноса второй части 2b заготовки 2 с первого транспортера на второй.
Второй транспортер 4 в сочетании с первым транспортером 3 перемещает вторую часть 2b заготовки 2 в положение, в котором она согнута и наложена своей поверхностью на первую часть 2а, которая удерживается на первом транспортере 3, как описано ниже.
Механизм 11 переноса содержит транспортер 12 в виде маятника, качающегося на оси Е, параллельной осям А и В роликов 5 и 6, и описывающего траекторию, касательную к этим роликам, между первым конечным положением, в котором он по существу касается ролика 5, и вторым конечным положением, в котором по существу касается ролика 6. Как и вращающиеся транспортеры 3 и 4, маятниковый транспортер 12 имеет всасывающее средство (не показано), которое может приводиться в действие для захвата и переноса одной заготовки 2.
Двигаясь из первого конечного положения, маятниковый транспортер 12 притягивает вторую часть 2b заготовки 2, ограниченную удерживающими элементами 8, и снимает вторую часть 2b с первого транспортера 3, после чего движется вперед (против часовой стрелки на фиг.1) для ее переноса на второй транспортер 4.
Во втором конечном положении маятниковый транспортер 12 отпускает вторую часть 2b заготовки 2, которая опускается на второй транспортер 4 и затем движется обратно (по часовой стрелке), отходя от второго транспортера.
Всасывающее средство маятникового транспортера 12 включено при его движении из первого конечного положения во второе и выключено при движении из второго конечного положения в первое.
Таким образом, при движении маятникового транспортера 12 назад к первому транспортеру 3 он отпускает вторую часть 2b заготовки 2 на второй транспортер 4 и далее не имеет с ней контакта.
Из изложенного видно, что механизм 11 переноса качается взад-вперед, двигаясь в том же направлении, что и ролик 5, когда вторая часть 2b заготовки 2 отделяется от поверхности ролика 5, а когда вторая часть 2b опускается на поверхность ролика 6, механизм переноса движется в том же направлении, что и ролик 6.
При вращении двух роликов 5 и 6 задняя половина заготовки 2, прижатая к первому ролику 5 удерживающими средствами 7, и передняя половина заготовки 2, перенесенная на ролик 6, принимают совместно форму буквы V и постепенно приближаются друг к другу до тех пор, пока не будут складываться одна на другую своими поверхностями по достижении упомянутой выше точки Т касания, в которой ролики действуют как прессовое устройство и в которой сгибание заготовки 2 заканчивается.
Машина 1 содержит горизонтальный выходной канал 15, расположенный, по ходу заготовок, за точкой Т касания роликов 5 и 6. Этот канал образован между двумя противолежащими участками 16 транспортерных лент 17 и 18, одна из которых вращается вокруг второго ролика 6 и направляющего ролика 17', а другая - вокруг первого ролика 5 и нескольких направляющих роликов 18'.
На входе выходного канала 15 расположен заварочный блок 13, который соединяет первую часть 2а с ее второй частью 2b заготовки 2, по меньшей мере частично, образуя подгузник/пеленку.
Заварочный блок 13 представляет собой обычное устройство типа аппарата для термосварки или ультразвуковой сварки и расположен в непосредственной близости к первому транспортеру 3 и второму транспортеру 4.
Согнутые и заваренные подгузники/пеленки проходят по каналу 15, образованному двумя участками 16, к выходу 19 машины.
Кроме того, машина 1 содержит средство 20 подачи, с помощью которого заготовки 2 подаются на первый транспортер 3 и размещаются на нем.
Средство 20 подачи представляет собой линейную транспортерную ленту 21, несущую непрерывную полосу 22, состоящую из последовательно соединенных друг с другом заготовок 2.
Вблизи одного конца 21а транспортерной ленты 21 установлено режущее устройство 23, содержащее барабан 24, снабженный ножом 25, для разрезания непрерывной ленты 22 на отдельные заготовки 2.
Кроме того, машина 1 содержит дистанционирующий механизм 26, расположенный между средством 20 подачи и первым транспортером 3, для подачи отрезанных заготовок 2 на первый транспортер 3 таким образом, что одна заготовка 2 находится на расстоянии от следующей заготовки, определяемом скоростью качания маятникового транспортера 12 между его конечными положениями.
Дистанционирующий механизм 26 содержит несколько вращающихся элементов 27, установленных на общей оси, которые могут вращаться независимо друг от друга, забирая отрезанную заготовку 2 со средства 20 подачи и ускоряя ее движение к первому транспортеру 3.
В примере, показанном на чертежах, дистанционирующий механизм 26 содержит три таких вращающихся элемента 27, каждый из которых состоит из рычага 28, установленного с возможностью поворота вокруг оси F, и аспирационного несущего элемента 29.
Настоящее изобретение также относится к способу сгибания заготовок 2, используемых для изготовления подгузников/пеленок.
Способ включает операцию перемещения заготовки 2 на первом транспортере 3 и удерживания ее первой части 2а на этом транспортере.
Одновременно вторую часть 2b заготовки 2 переносят на второй транспортер 4. Эта вторая операция выполняется с помощью механизма 11 переноса.
Следующая операция способа состоит в отведении механизма 11 переноса от второй части 2b заготовки 2 сразу по окончании переноса.
После переноса заготовки на второй транспортер 4 взаимодействие между механизмом 11 переноса и заготовкой 2 прекращается.
Операцию переноса и операцию отведения выполняют с помощью описанного выше маятникового транспортера 12.
Из описания понятно, что операция переноса выполняется маятниковым транспортером 12 во время его движения из первого конечного положения во второе конечное положение, а операция отведения выполняется маятниковым транспортером 12 во время его возврата из второго конечного положения в первое конечное положение.
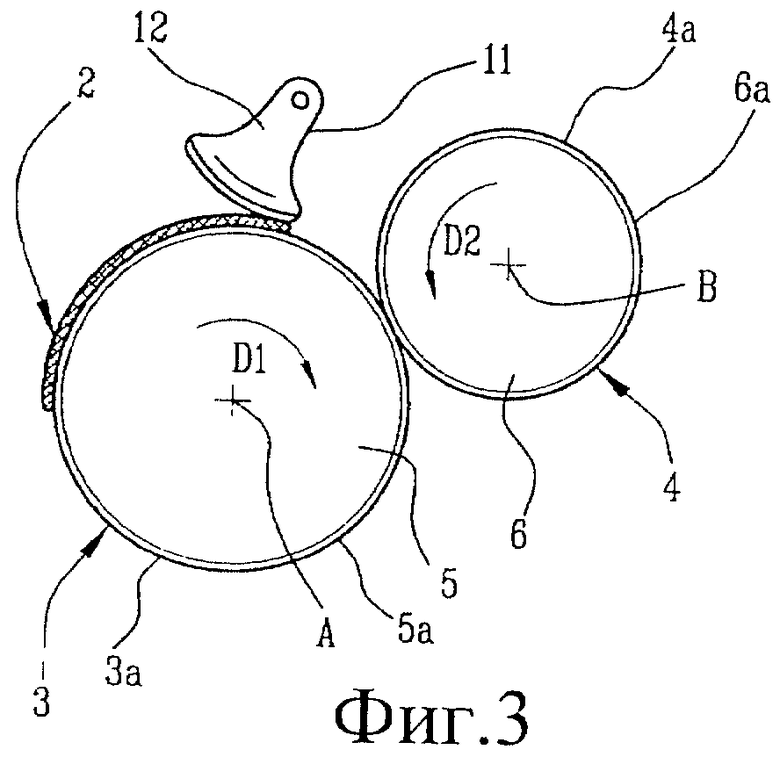
Операция переноса включает вспомогательные операции расположения маятникового транспортера 12 в непосредственной близости к первому транспортеру 3 и включение его всасывающего средства для притягивания второй части 2b заготовки 2 (фиг.3).
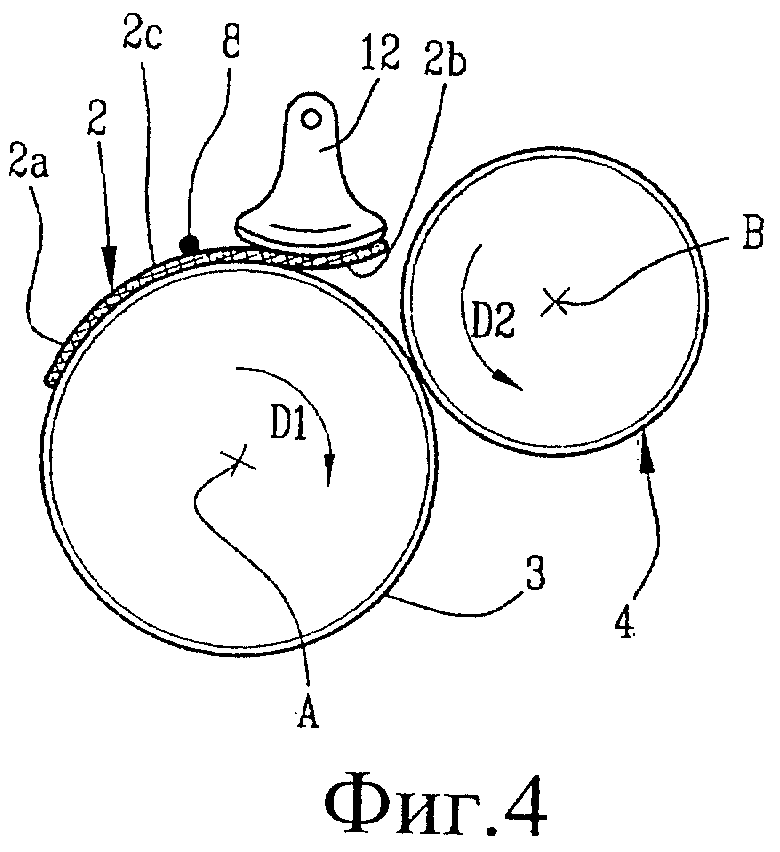
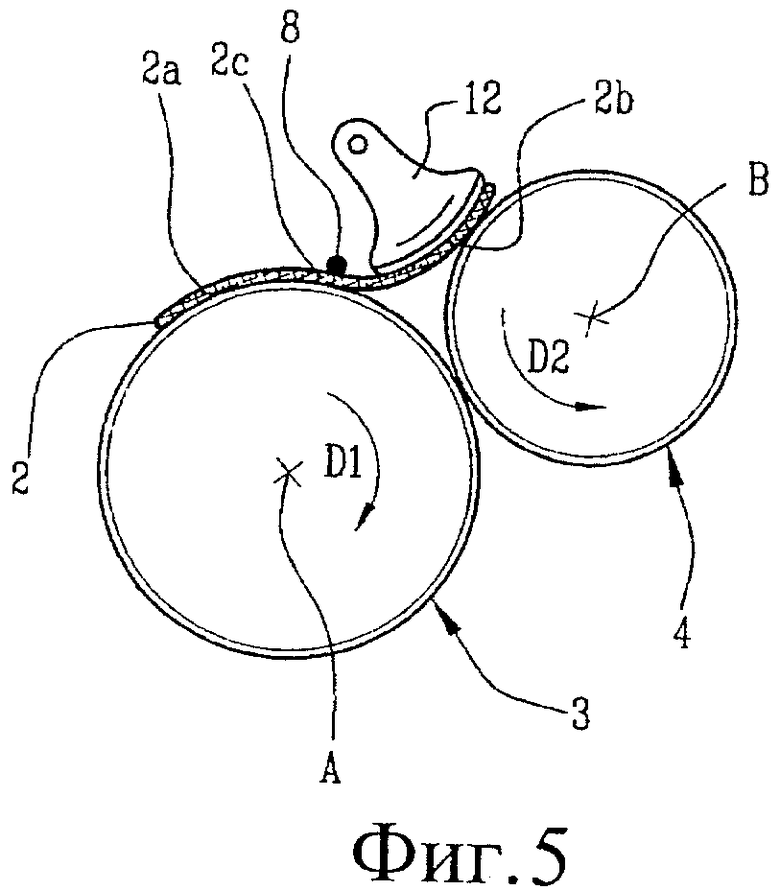
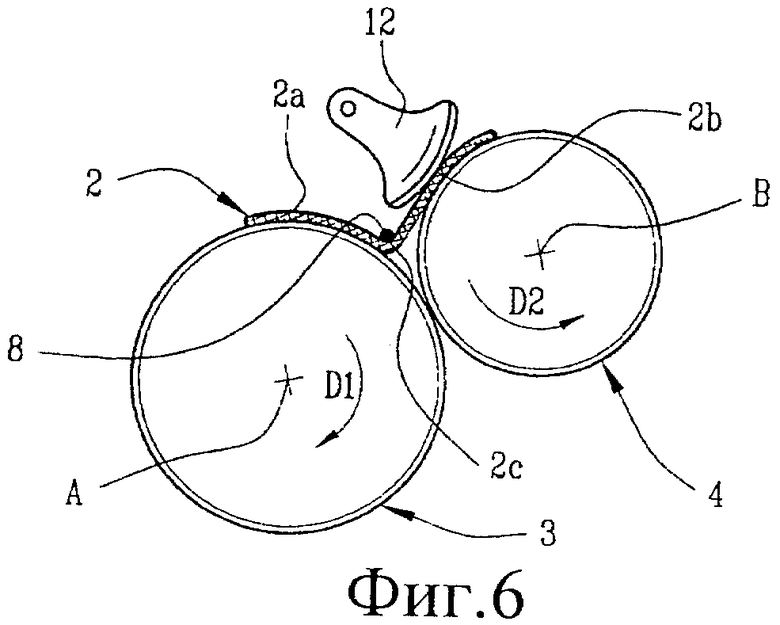
Маятниковый транспортер 12 качается на своей оси, переходя из первого конечного положения во второе конечное положение так, что заготовка 2 подводится ко второму транспортеру 4 (фиг.4 и 5). После достижения этого положения всасывающее средство отключают и вторая часть 2b заготовки опускается на второй транспортер 4 (фиг.6).
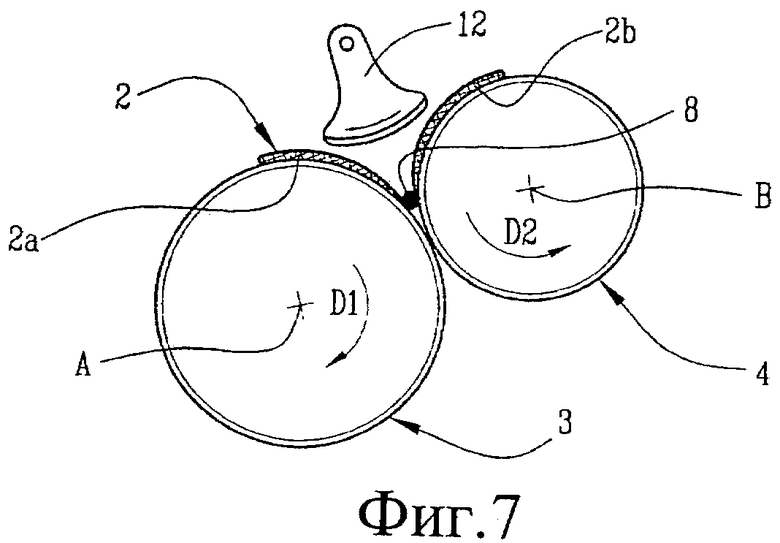
После отключения всасывающего средства механизма переноса направление движения маятникового транспортера 12 изменяется на обратное, и он начинает возвращаться из второго конечного положения в первое (фиг.7). Во время этой операции взаимодействие между маятниковым транспортером 12 и вторым транспортером 4 ограничено дугой траектории маятникового транспортера 12.
Во время этой операции направление движения маятникового транспортера 12 противоположно направлению вращения второго транспортера 4, а угловые скорости второго транспортера 4 и маятникового транспортера 12 по существу одинаковы.
После операции переноса второй части 2b заготовки 2 на второй транспортер 4 выполняют операцию наложения второй части 2b по всей поверхности на первую часть 2а и тем самым складывания заготовки 2 пополам (фиг.7), когда она достигает точки, где ролики 5 и 6 по существу касаются друг друга.
Так как ролики 5 и 6 вращаются в противоположных направлениях, первая и вторая части 2а и 2b заготовки 2 могут транспортироваться к указанной точке касания, приближаясь друг к другу, причем так как во время этой операции первая часть 2а заготовки удерживается на первом транспортере 3, вторая часть 2b может быть аккуратно наложена по всей своей поверхности на первую часть 2а заготовки 2 для завершения операции сгибания.
Следует заметить, что это движение сообщается заготовке 2 без остановки первого транспортера 3 и второго транспортера 4, т.е. ролики 5 и 6 вращаются непрерывно.
Способ может включать операцию частичного заваривания первой части 2а и второй части 2b для образования подгузника/пеленки.
В заключение согнутую заготовку 2 удаляют от роликов и направляют по выходному каналу 15 на выход 19 машины.
Настоящее изобретение обеспечивает достижение указанных целей и имеет существенные преимущества.
Благодаря применению маятникового транспортера 12 вторая часть 2b заготовки 2 переносится быстро и надежно.
Более конкретно, как только вторая часть 2b заготовки освобождается и опускается на второй транспортер 4, направление движения маятникового транспортера 12 изменяется на противоположное, и он движется в том же направлении и с той же окружной скоростью, что и второй транспортер 4.
Интервал времени, в течение которого маятниковый транспортер 12 взаимодействует со вторым транспортером 4 в ходе своего обратного движения, сведен к минимуму.
Благодаря этому значительно уменьшаются силы волочения и вытягивания, действующие на заготовку 2, что снижает риск повреждения подгузника/пеленки.
Благодаря значительному уменьшению сил волочения и вытягивания уменьшается также риск пластической деформации заготовки 2 во время операции наложения первой части 2а и второй части 2b друг на друга.
Поэтому происходит точное складывание заготовки 2 даже при больших скоростях работы машины.
Машина для сгибания заготовок, используемых для изготовления подгузников/пеленок, содержит первый транспортер (3) для последовательной подачи отдельных заготовок (2) ко второму транспортеру (4), удерживающие средства (7), соединенные с первым транспортером (3) и выполненные с возможностью контакта с промежуточным участком каждой заготовки (2) так, что первая часть (2а) заготовки (2) удерживается на первом транспортере (3), а ее вторая часть (2b) может переходить на второй транспортер (4), и механизм (11) переноса, расположенный между первым транспортером (3) и вторым транспортером (4), для переноса второй части (2b) заготовки (2) с первого транспортера (3) на второй транспортер (4). Механизм (11) переноса содержит качающийся маятниковый транспортер (12), установленный с возможностью движения между первым конечным положением вблизи первого транспортера (3) и вторым конечным положением вблизи второго транспортера (4) с целью переноса второй части (2b) заготовки. Изобретение позволяет сгибать заготовки просто, с особой аккуратностью и точностью. 2 н. и 14 з.п. ф-лы, 7 ил.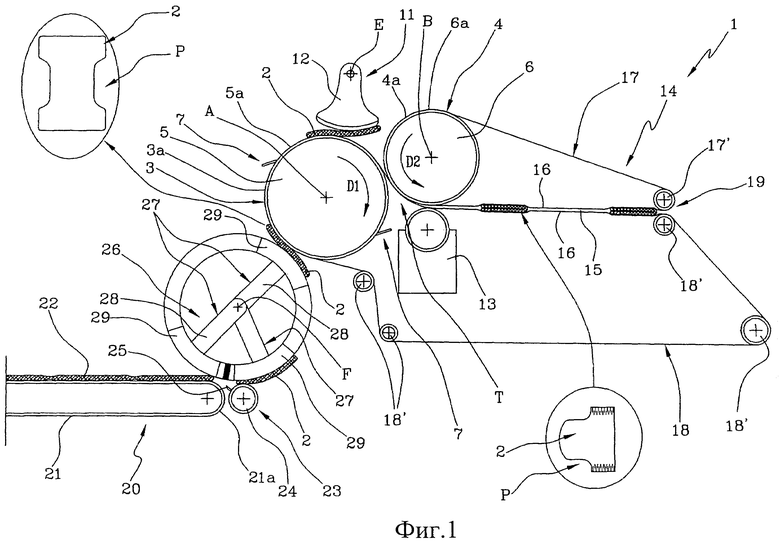
1. Машина для сгибания заготовок подгузников/пеленок, содержащая: первый транспортер (3) для последовательной подачи заготовок подгузников/пеленок ко второму транспортеру (4), удерживающие средства (7), соединенные с первым транспортером (3) и выполненные с возможностью контакта с промежуточным участком каждой заготовки (2) так, что первая часть (2а) заготовки (2) удерживается на первом транспортере (3), а ее вторая часть (2b) может переходить на второй транспортер (4), и механизм (11) переноса, расположенный между первым транспортером (3) и вторым транспортером (4), для переноса второй части (2b) заготовки (2) с первого транспортера (3) на второй транспортер (4), причем второй транспортер (4) в сочетании с первым транспортером (3) перемещает по меньшей мере вторую часть (2b) заготовки таким образом, что она накладывается на первую часть (2а) в точке (Т), где первый транспортер (3) и второй транспортер (4), по существу, касаются друг друга, отличающаяся тем, что механизм (11) переноса содержит качающийся маятниковый транспортер (12), установленный с возможностью движения между первым конечным положением вблизи первого транспортера (3) и вторым конечным положением вблизи второго транспортера (4) с целью переноса второй части (2b) заготовки.
2. Машина по п.1, в которой маятниковый транспортер (12) содержит всасывающее средство, которое может включаться по выбору для притягивания и переноса второй части (2b) заготовки (2).
3. Машина по п.1, в которой всасывающее средство маятникового транспортера включено при переходе маятникового транспортера из первого конечного положения во второе конечное положение с целью переноса второй части (2b) заготовки с первого транспортера (3) на второй транспортер (4) и выключено при переходе маятникового транспортера из второго конечного положения в первое конечное положение с целью отпускания второй части (2b) на второй транспортер (4).
4. Машина по любому из пп.1-3, в которой маятниковый транспортер (12) установлен с возможностью движения по траектории, по существу, касательной к первому транспортеру (3) и второму транспортеру (4).
5. Машина по любому из пп.1-3, в которой первый транспортер (3) и второй транспортер (4) содержат соответствующие ролики (5, 6), вращающиеся на соответствующих осях (А, В), параллельных друг другу.
6. Машина по п.5, в которой первый транспортер (3) и второй транспортер (4) также содержат соответствующие всасывающие средства, которые могут включаться по выбору в соответствии с положением заготовки (2), для ее удержания и транспортировки.
7. Машина по п.5, в которой ролики (5, 6) установлены, по существу, с касанием друг друга и приводятся во вращение в противоположных направлениях.
8. Машина по любому из пп.1-3, в которой удерживающие средства (7) содержат несколько удерживающих элементов (8), расположенных равномерно по окружности на наружной поверхности (3а) первого транспортера (3).
9. Машина по п.8, в которой удерживающие элементы (8) установлены с возможностью перемещения между первым положением, в котором они не имеют контакта с заготовкой, и вторым положением, в котором они находятся на заготовке (2) для ее удерживания за счет сильного прижатия к ее центральной части (2с).
10. Машина по п.4, дополнительно содержащая отводящее средство (14) для отведения согнутых заготовок (2) от роликов (5, 6) и направления к выходу (19) машины.
11. Машина по п.10, в которой отводящее средство (14) содержит по меньшей мере две транспортерных ленты (17), имеющих соответствующие друг другу рабочие участки (16), образующие канал (15) для направления согнутых заготовок (2).
12. Машина по любому из пп.1-3, дополнительно содержащая дистанционирующий механизм (26) для последовательной подачи заготовок (2), отделенных одна от другой подходящим расстоянием, к первому транспортеру (3).
13. Способ сгибания заготовок подгузников/пеленок, включающий следующие операции: перемещение плоской заготовки (2) на первом транспортере (3), удерживание первой части (2а) заготовки (2) на первом транспортере (3), перенос второй части (2b) заготовки (2) с первого транспортера (3) на второй транспортер (4) при помощи механизма (11) переноса и наложение второй части (2b) заготовки на ее первую часть (2а) при помощи первого транспортера (3) и второго транспортера (4), отличающийся тем, что операцию переноса второй части (2b) заготовки (2) выполняют с помощью маятникового транспортера (12), который является частью механизма (11) переноса и может перемещаться между первым конечным положением вблизи первого транспортера (3) и вторым предельным положением вблизи второго транспортера (4).
14. Способ по п.13, в котором операция переноса второй части (2b) заготовки (2) включает вспомогательные операции установки маятникового транспортера (12) в первое конечное положение, включения всасывающего средства маятникового транспортера (12), установки маятникового транспортера (12) во второе конечное положение и выключения его всасывающего средства.
15. Способ по п.13 или 14, в котором операция отведения механизма (11) переноса от второй части (2b) заготовки (2) включает операцию перемещения маятникового транспортера (12) из второго конечного положения в первое конечное положение.
16. Способ по п.13 или 14, в котором перемещение заготовки (2) первым транспортером (3) и вторым транспортером (4) является непрерывным.
| Система управления прессом | 1989 |
|
SU1726278A1 |
| US 2003119641 А1, 26.06.2003 | |||
| US 6854624 B2, 15.02.2005. | |||

