ОБЛАСТЬ ТЕХНИКИ
[001] Варианты реализации настоящего изобретения в целом относятся к системе и способу управления перемещением закрылков летательного аппарата.
УРОВЕНЬ ТЕХНИКИ
[002] Для увеличения подъемной силы или лобового сопротивления во время взлетов и посадок на крыльях летательных аппаратов используются системы увеличения подъемной силы. Система одного типа содержит закрылки на задних кромках крыльев. Закрылки представляют собой подвижные поверхности управления, которые могут быть выпущены во время взлетов и посадок и убраны на крейсерских скоростях.
[003] Для выпуска и уборки закрылков, расположенных на задней кромке крыла, могут быть использованы самые разные приводные системы. Приводная система одного известного типа включает в себя две приводные установки, каждая из которых соединена с противоположной стороной закрылка. Распределенная приводная система включает в себя приводную установку, установленную на одной из двух сторон закрылка без механического взаимодействия между приводными установками. Известная приводная установка включает в себя двигатель, зубчатую передачу и приводной винт, который соединен с закрылком через рычаг. Двигатель (например, электродвигатель) в приводной установке поворачивает приводной винт в прямом или обратном направлении через зубчатую передачу. Приводной винт преобразует вращательное движение двигателя и зубчатой передачи в линейное движение, чтобы вызвать перемещение рычага. Когда приводной винт тянет или толкает рычаг, происходит выпуск или уборка закрылка, соединенного с рычагом.
[004] Поскольку закрылок обычно приводится в действие двумя приводными установками, если одна приводная установка вызывает перемещение со скоростью, отличающей от другой приводной установки, закрылок может испытывать перекос или крутку под воздействием достаточных аэродинамических нагрузок. Например, при активном выпуске закрылка или его активной уборке с помощью двух приводных установок, вызывающих перемещение с разной скоростью, закрылок может быть подвержен перекосу или крутке.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[005] Существует потребность в системе и способе, которыми синхронизируют перемещение закрылков одного или более крыльев летательного аппарата. Существует потребность в системе и способе, которые предотвращают или минимизируют перекос или крутку закрылка во время работы или иным образом уменьшают вероятность такого перекоса. Кроме того, существует потребность в системе и способе, которые предотвращают, минимизируют или иным образом уменьшают рассогласование между крыльями в отношении системы закрылков летательного аппарата, поскольку рассогласование крыльев может вызвать аэродинамический момент крена.
[006] С учетом указанных проблем, некоторые варианты реализации раскрытия настоящего изобретения обеспечивают создание системы управления одним или более закрылками летательного аппарата. Система может включать в себя первый закрылок, прикрепленный с возможностью перемещения к первому крылу летательного аппарата. Первый закрылок выполнен с возможностью перемещения между выпущенным положением и убранным положением. Первый привод соединен с первым закрылком. Первый датчик соединен с первым приводом. Первый датчик выполнен с возможностью определения положения и/или скорости первого привода. Первый датчик также выполнен с возможностью вывода сигнала первого датчика, который относится к положению и/или скорости первого привода. Второй привод также соединен с первым закрылком. Второй датчик соединен со вторым приводом. Второй датчик выполнен с возможностью определения положения и/или скорости второго привода. Второй датчик также выполнен с возможностью вывода сигнала второго датчика, который относится к положению и/или скорости второго привода. Блок управления связан с возможностью передачи данных с первым приводом, первым датчиком, вторым приводом и вторым датчиком. Блок управления выполнен с возможностью приема сигналов первого и второго датчиков от первого и второго датчиков, соответственно, сравнения сигналов первого и второго датчиков для определения разности между сигналами первого и второго датчиков и регулировки скорости одного или обоих из первого или второго приводов на основе разности между сигналами первого и второго датчиков.
[007] Блок управления может быть выполнен с возможностью регулировки скорости первого и/или второго приводов путем уменьшения скорости ведущего привода из первого и второго приводов, который обгоняет запаздывающий привод из первого и второго приводов, до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов. По меньшей мере еще в одном варианте реализации изобретения блок управления может быть выполнен с возможностью регулировки скорости первого и/или второго приводов путем увеличения скорости запаздывающего привода из первого и второго приводов, который запаздывает относительно ведущего привода из первого и второго приводов, до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов. По меньшей мере еще в одном варианте реализации изобретения блок управления выполнен с возможностью регулировки скорости первого и/или второго приводов путем уменьшения скорости ведущего привода из первого и второго приводов, который обгоняет запаздывающий привод из первого и второго приводов, и увеличения скорости запаздывающего привода из первого и второго приводов до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов.
[008] Система может также включать в себя второй закрылок, прикрепленный с возможностью перемещения ко второму крылу летательного аппарата. Второй закрылок выполнен с возможностью перемещения между выпущенным положением и убранным положением. Третий привод соединен со вторым закрылком. Третий датчик соединен с третьим приводом. Третий датчик выполнен с возможностью определения положения и/или скорости третьего привода и вывода сигнала третьего датчика, относящегося к положению и/или скорости третьего привода. Четвертый привод соединен со вторым закрылком. Четвертый датчик соединен с четвертым приводом. Четвертый датчик выполнен с возможностью определения положения и/или скорости четвертого привода и вывода сигнала четвертого датчика, относящегося к положению и/или скорости четвертого привода. Блок управления связан с возможностью передачи данных с третьим приводом, третьим датчиком, четвертым приводом и четвертым датчиком. Блок управления также выполнен с возможностью приема сигналов третьего и четвертого датчиков от третьего и четвертого датчиков, соответственно, сравнения сигналов третьего и четвертого датчиков для определения разности между сигналами третьего и четвертого датчиков и регулировки скорости одного или обоих третьего или четвертого приводов на основе разности между сигналами третьего и четвертого датчиков.
[009] Блок управления может быть выполнен с возможностью определения разности между скоростью и/или положением первого и второго закрылков и регулировки скорости первого и/или второго закрылков на основе разности между скоростью и/или положением первого и второго закрылков. Блок управления может быть выполнен с возможностью определения разности между скоростью и/или положением первого и второго закрылков путем анализа сигналов первого, второго, третьего и четвертого датчиков.
[0010] Блок управления может быть выполнен с возможностью регулировки скорости первого и/или второго закрылков путем уменьшения скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков. По меньшей мере еще в одном варианте реализации изобретения блок управления выполнен с возможностью регулировки скорости первого и/или второго закрылков путем увеличения скорости запаздывающего закрылка из первого и второго закрылков, который запаздывает относительно ведущего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий привод из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков. По меньшей мере еще в одном варианте реализации изобретения блок управления выполнен с возможностью регулировки скорости первого и/или второго закрылков путем уменьшения скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, и увеличения скорости запаздывающего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий привод из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
[0011] Некоторые варианты реализации раскрытия настоящего изобретения обеспечивают создание способа управления одним или более закрылками летательного аппарата. Способ может включать прием сигналов первого и второго датчиков от соответствующих первого и второго датчиков, соединенных с соответствующими первым и вторым приводами, которые прикреплены с возможностью перемещения к первому закрылку первого крыла летательного аппарата. Сигналы первого и второго датчиков относятся к положению и/или скорости соответствующих первого и второго приводов. Способ может также включать сравнение сигналов первого и второго датчиков для определения разности между сигналами первого и второго датчиков и регулировку скорости одного или обоих из первого или второго приводов на основе разности между сигналами первого и второго датчиков.
[0012] Некоторые варианты реализации раскрытия настоящего изобретения обеспечивают создание системы управления одним или более закрылками летательного аппарата. Система включает в себя первый закрылок, прикрепленный с возможностью перемещения к первому крылу летательного аппарата. Первый закрылок выполнен с возможностью перемещения между выпущенным положением и убранным положением. Второй закрылок прикреплен с возможностью перемещения ко второму крылу летательного аппарата. Второй закрылок выполнен с возможностью перемещения между выпущенным положением и убранным положением. Блок управления выполнен с возможностью определения разности между скоростью и/или положением первого и второго закрылков и регулировки скорости первого и/или второго закрылков на основе разности между скоростью и/или положением первого и второго закрылков.
[0013] По меньшей мере в одном варианте реализации изобретения блок управления выполнен с возможностью определения разности между скоростью и/или положением первого и второго закрылков путем анализа множества сигналов датчиков, выдаваемых датчиками приводов, которые соединены с первым и вторым закрылками.
[0014] Блок управления может быть выполнен с возможностью регулировки скорости первого и/или второго закрылков путем уменьшения скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, до тех пор, пока запаздывающий привод из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков. Блок управления может быть выполнен с возможностью регулировки скорости первого и/или второго закрылков путем увеличения скорости запаздывающего закрылка из первого и второго закрылков, который запаздывает относительно ведущего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий привод из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков. Блок управления может быть выполнен с возможностью регулировки скорости первого и/или второго закрылков путем уменьшения скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, и увеличения скорости запаздывающего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
[0015] Некоторые варианты реализации раскрытия настоящего изобретения обеспечивают способ управления одним или более закрылками летательного аппарата. Способ может включать определение разности между скоростью и/или положением первого и второго закрылков соответствующих первого и второго крыльев летательного аппарата. Первый и второй закрылки выполнены с возможностью перемещения между выпущенным положением и убранным положением. Способ может также включать регулировку скорости первого и/или второго закрылков на основе разности между скоростью и/или положением первого и второго закрылков.
[0016] По меньшей мере в одном варианте реализации изобретения операция определения разности включает в себя анализ множества сигналов датчиков, выдаваемых датчиками приводов, которые соединены с первым и вторым закрылками.
[0017] Операция регулировки скорости может включать уменьшение скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков. Операция регулировки скорости может включать увеличение скорости запаздывающего закрылка из первого и второго закрылков, который запаздывает относительно ведущего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков. Операция регулировки скорости может включать уменьшение скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, и увеличение скорости запаздывающего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] На ФИГ. 1 схематически показана система синхронизации закрылков согласно варианту реализации раскрытия настоящего изобретения.
[0019] На ФИГ. 2 показана структурная схема способа синхронизации приводов, соединенных с закрылком крыла летательного аппарата согласно варианту реализации раскрытия настоящего изобретения.
[0020] На ФИГ. 3 показана структурная схема способа синхронизации закрылков, прикрепленных с возможностью перемещения к крыльям летательного аппарата согласно варианту реализации раскрытия настоящего изобретения.
[0021] На ФИГ. 4 схематически показан вид сверху летательного аппарата согласно варианту реализации раскрытия настоящего изобретения.
[0022] На ФИГ. 5 схематически показан привод согласно варианту реализации раскрытия настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0023] Предшествующий раздел описания "Раскрытие сущности изобретения", а также последующий раздел "Осуществление изобретения" с подробным описанием некоторых вариантов реализации будут лучше поняты при прочтении совместно с прилагаемыми чертежами. При использовании в настоящем документе элемент или этап, который приведен в единственном числе и которому предшествует грамматический показатель единственного числа не следует понимать как обязательно исключающий множественное число этих элементов или этапов. Кроме того, ссылки на "один вариант реализации изобретения" не предназначены для истолкования как исключающие существование дополнительных вариантов реализации, которые также включают перечисленные признаки. Более того, если явно не указано обратное, варианты реализации "содержащие " или "имеющие" элемент или множество элементов, имеющих определенное свойство, могут включать в себя дополнительные элементы, не обладающие этим свойством.
[0024] Варианты реализации раскрытия настоящего изобретения могут быть использованы для приводных систем увеличения подъемной силы, которые используют распределенный привод закрылков. Варианты реализации раскрытия настоящего изобретения обеспечивают создание систем и способов, которые уменьшают перекос закрылков посредством измерения положения и/или скорости приводов, соединенных с закрылком, и в ответ на это регулируют скорость одного или более приводов, с тем чтобы синхронизировать приводы. Положение и/или скорость приводов, связанных с одним или более другими закрылками, измеряют и регулируют соответственно, с тем чтобы улучшить аэродинамические характеристики (или, уменьшить отрицательные аэродинамические эффекты).
[0025] Некоторые варианты реализации раскрытия настоящего изобретения обеспечивают создание летательного аппарата (такого как коммерческий, военный, беспилотный летательный аппарат и/или т.п.), который может включать в себя крыло, имеющее закрылок, множество приводов, которые соединены с закрылком и выполнены с возможностью размещения закрылка, первый датчик, связанный с первым приводом для определения скорости и/или положения первого привода, второй датчик, связанный со вторым приводом для определения скорости и/или положения второго привода, и блок управления или контроллер, который выполнен с возможностью определения разности между скоростью и/или положением первого привода и скоростью и/или положением второго привода. Блок управления определяет, какой из приводов является ведущим приводом, а какой из приводов является запаздывающим приводом, и регулирует скорость ведущего привода (например, уменьшая его скорость), так что разность в положении ведущего и запаздывающего приводов уменьшается и, благодаря этому, уменьшается величина и/или вероятность перекоса закрылков.
[0026] Некоторые варианты реализации раскрытия настоящего изобретения обеспечивают создание способа управления первым и вторым приводами, которые используются для размещения закрылка крыла летательного аппарата. Способ может включать определение положения и/или скорости первого привода, определение положения и/или скорости второго привода, сравнение положения и/или скорости первого привода с положением и/или скоростью второго привода, определение, какой из первого и второго приводов является более медленным, определение, является ли положение первого привода наиболее удаленным от необходимого положения, или является ли положение второго привода наиболее удаленным от необходимого положения, с тем чтобы идентифицировать один из первого и второго приводов в качестве ведущего привода и один из первого и второго приводов в качестве запаздывающего привода, регулировку скорости ведущего привода с обеспечением, таким образом, возможности для запаздывающего привода нагнать ведущий привод.
[0027] Кроме того, варианты реализации раскрытия настоящего изобретения обеспечивают создание систем и способов, которые выполнены с возможностью синхронизации движения между различными закрылками летательного аппарата. Например, блок управления может отслеживать скорость и/или положение первого и второго закрылков и синхронизировать движение первого и второго закрылков.
[0028] Привод является ведущим, если его относительное положение находится впереди и/или скорость больше по сравнению (по отношению к необходимому направлению движения) с относительным положением или скоростью другого привода, который может быть соединен с тем же самым или другим закрылком. И наоборот, привод является запаздывающим, если его относительное положение находится позади и/или скорость меньше по сравнению (по отношению к необходимому направлению движения) с относительным положением или скоростью другого привода, который может быть соединен с тем же самым или другим закрылком.
[0029] Схожим образом, закрылок является ведущим, если его относительное положение находится впереди и/или скорость больше по сравнению (по отношению к необходимому направлению движения) с относительным положением или скоростью другого закрылка. И наоборот, закрылок является запаздывающим, если его относительное положение находится позади и/или скорость меньше по сравнению (по отношению к необходимому направлению движения) с относительным положением или скоростью другого закрылка.
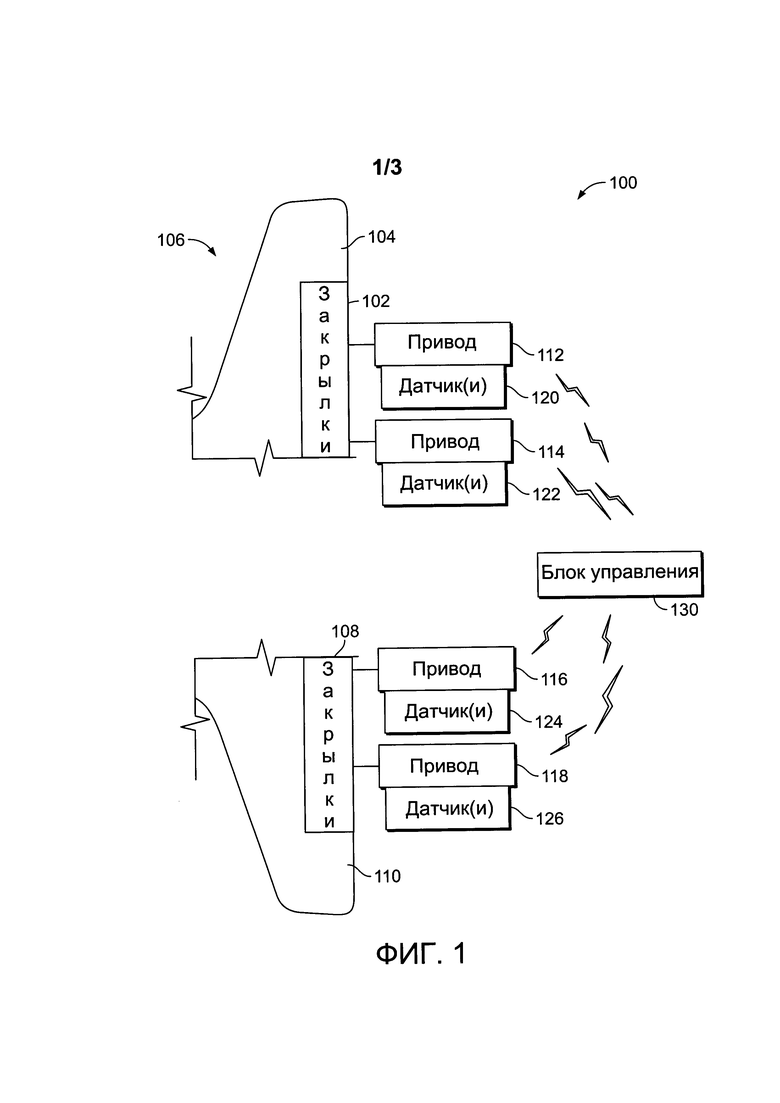
[0030] На ФИГ. 1 схематически показана система 100 синхронизации закрылков согласно варианту реализации раскрытия настоящего изобретения. Система 100 синхронизации закрылков включает в себя закрылок 102 на крыле 104 летательного аппарата 106 и закрылок 108 на противоположном крыле ПО летательного аппарата 106. Закрылки 102 и 108 могут быть закрылками задней кромки крыльев 104 и ПО, соответственно.
[0031] Закрылок 102 соединен с приводами 112 и 114, а закрылок 108 соединен с приводами 116 и 118. Приводы 112 и 118 могут быть наружными приводами, а приводы 114 и 116 могут быть внутренними приводами. Приводы 112, 114, 116 и 118 могут быть электромеханическими приводами, которые выполнены с возможностью приведения в действие закрылков 102 и 108 между убранным и выпущенным положениями. Приводы 112, 114, 116 и 118 могут быть приводными установками, такими как показаны и описаны в патенте US 9,193,479, озаглавленном "Отслеживание систем увеличения подъемной силы для воздушных летательных аппаратов" (Monitoring of High-Lift Systems for Aircraft), который включен в настоящее описание посредством ссылки во всей его полноте. В частных вариантах реализации приводы 112, 114, 116 и 118 могут быть различными устройствами других типов, которые используются для перемещения закрылков 102 и 108. Например, приводы 112, 114, 116 и 118 могут быть или включать в себя приводные поворотные ремни, рычажные механизмы и/или т.п. Приводы 112, 114, 116 и 118 могут быть закреплены внутри крыльев 104 и 110. В частных вариантах реализации приводы 112, 114, 116 и 118 могут быть расположены внутри фюзеляжа летательного аппарата 106 и соединены с закрылками 102 и 108 посредством соединительных звеньев, сочленений и/или т.п.
[0032] Как показано на чертежах, приводы 112 и 114 могут быть установлены на противоположных сторонах или концах закрылка 102, а приводы 116 и 118 могут быть установлены на противоположных сторонах или концах закрылка 108. В частных вариантах реализации приводы 112 и 114 могут быть установлены в одних областях закрылка, а приводы 116 и 118 могут быть установлены в различных областях закрылков 108. Может отсутствовать механическое взаимодействие между приводами 112 и 114 и отсутствовать механическое взаимодействие между приводами 116 и 118. По существу, летательный аппарат 106 может обеспечить распределенную систему для увеличения подъемной силы.
[0033] Хотя закрылок 102 показан соединенным с двумя приводами 112 и 114, а закрылок 108 показан соединенным с двумя приводами 116 и 118, каждый из закрылков 102 и 108 может быть соединен с дополнительными приводами. Например, каждый из закрылков 102 может быть соединен с тремя или более приводами.
[0034] Один или более датчиков 120 соединены с приводом 112 и/или закрылком 102. Датчик(и) 120 может быть выполнен (могут быть выполнены) с возможностью измерения скорости привода 112 и/или закрылка 102. Датчик(и) 120 также (или альтернативно) может быть выполнен (могут быть выполнены) с возможностью измерения положения привода 112 и/или закрылка 102. Датчик(и) 120 может быть закреплен (могут быть закреплены) внутри крыла 104. В частных вариантах реализации датчик(и) 120 может быть расположен (могут быть расположены) внутри фюзеляжа летательного аппарата 106 и соединены с приводом 112 и/или закрылком 102 посредством соединительных звеньев, сочленений и/или т.п.
[0035] Один или более датчиков 122 соединены с приводом 114 и/или закрылком 102. Датчик(и) 122 может быть выполнен (могут быть выполнены) с возможностью измерения скорости привода 114 и/или закрылка 102. Датчик(и) 122 также (или альтернативно) может быть выполнен (могут быть выполнены) с возможностью измерения положения привода 114 и/или закрылка 102. Датчик(и) 122 может быть закреплен (могут быть закреплены) внутри крыла 104. В частных вариантах реализации датчик(и) 122 может быть расположен (могут быть расположены) внутри фюзеляжа летательного аппарата 106 и соединены с приводом 114 и/или закрылком 102 посредством соединительных звеньев, сочленений и/или т.п.
[0036] Один или более датчиков 124 соединены с приводом 116 и/или закрылком 108. Датчик(и) 124 может быть выполнен (могут быть выполнены) с возможностью измерения скорости привода 116 и/или закрылка 108. Датчик(и) 124 также (или альтернативно) может быть выполнен (могут быть выполнены) с возможностью измерения положения привода 116 и/или закрылка 108. Датчик(и) 124 может быть закреплен (могут быть закреплены) внутри крыла 110. В частных вариантах реализации датчик(и) 124 может быть расположен (могут быть расположены) внутри фюзеляжа летательного аппарата 106 и соединены с приводом 116 и/или закрылком 108 посредством соединительных звеньев, сочленений и/или т.п.
[0037] Один или более датчиков 126 соединены с приводом 118 и/или закрылком 108. Датчик(и) 126 может быть выполнен (могут быть выполнены) с возможностью измерения скорости привода 118 и/или закрылка 108. Датчик(и) 126 также (или альтернативно) может быть выполнен (могут быть выполнены) с возможностью измерения положения привода 118 и/или закрылка 108. Датчик(и) 126 может быть закреплен (могут быть закреплены) внутри крыла 110. В частных вариантах реализации датчик(и) 126 может быть расположен (могут быть расположены) внутри фюзеляжа летательного аппарата 106 и соединены с приводом 118 и/или закрылком 108 посредством соединительных звеньев, сочленений и/или т.п.
[0038] Блок 130 управления функционально соединен с приводами 112, 114, 116 и 118 и связан с ними с возможностью передачи данных. Блок 130 управления может быть расположен внутри фюзеляжа летательного аппарата 106 (например, в кабине) и может быть соединен с каждым приводом 112, 114, 116 и 118 посредством одного или более проводных или беспроводных соединений. Блок 130 управления выполнен с возможностью управления работой приводов 112, 114 и 116 и 118 управления перемещением закрылков 102 и 108 на основании команд управления от оператора, такого как пилот летательного аппарата 106.
[0039] Блок 130 управления также соединен с датчиками 120, 122, 124 и 126 и связан с ними с возможностью передачи данных, например посредством одного или более проводных или беспроводных соединений. Блок 130 управления принимает сигналы от датчиков 120, 122, 124 и 126 для определения скорости и/или положения каждого привода 112, 114, 116 и 118. На основании сигналов, принятых от датчиков 120, 122, 124 и 126, блок 130 управления может регулировать движение приводов 112, 114, 116 и 118. Например, блок 130 управления может регулировать скорость приводов 112 и 114 на основании сигналов, принятых от датчиков 120 и 122, чтобы обеспечить синхронизацию приводов 112 и 114 и перемещение закрылка 102 с одной и той же скоростью. Схожим образом, блок 130 управления может осуществлять регулировку скорости приводов 116и 118 на основании сигналов, принятых от датчиков 124 и 126, чтобы обеспечить синхронизацию приводов 116 и 118 и перемещение закрылка 108 с одной и той же скоростью. Кроме того, блок 130 управления может измерять скорость и/или положение каждого закрылка 102 и 108 на основании сигналов, принятых от датчиков 120, 122, 124 и 126 и регулировать движение закрылков 102 и 108, чтобы обеспечить синхронизацию обоих закрылков 102 и 108 в необходимом положении и их перемещение с необходимой скоростью.
[0040] Блок 130 управления принимает сигналы от датчиков 120 и 122. Принятые сигналы могут относиться к скорости приводов 112, 114, положению приводов 112, 114, скорости закрылка 102 и/или положению закрылка 102. Например, сигналы, выводимые датчиками 120 и 122 и принимаемые блоком 130 управления, обеспечивают данные о положении и скорости приводов 112 и 114 соответственно.
[0041] Блок 130 управления сравнивает сигналы, принятые от датчиков 120 и 122. Блок 130 управления определяет, существует ли разность положений и/или скоростей между приводами 112 и 114, на основании сигналов, принятых от датчиков 120 и 122. При отсутствии разности блок 130 управления продолжает управлять приводами 112 и 114 без регулировки. Если, однако, существует разность положений и/или скоростей между приводами 112 и 114, блок 130 управления регулирует движение приводов 112 и 114. Например, если блок 130 управления определяет, что привод 112 находится в продвинутом положении относительно привода 114, блок 130 управления может уменьшать скорость привода 112 до тех пор, пока привод 114 не догонит положение привода 112, и с этого момента блок 130 управления будет управлять приводами 112 и 114 с одной и той же скоростью. Схожим образом, если блок 130 управления определяет, что привод 112 выполняет перемещение с большей скоростью, чем привод 114, блок 130 управления может уменьшать скорость привода 112 до тех пор, пока привод 114 не догонит положение и скорость привода 112, и с этого момента блок 130 управления будет управлять приводами 112 и 114 с одной и той же скоростью.
[0042] Соответственно, блок 130 управления отслеживает движение приводов 112 и 114 для определения, есть ли запаздывание одного из приводов 112 и 114 относительно другого из приводов 112 и 114. После этого блок 130 управления осуществляет регулировку скорости ведущего привода 112 или 114, так что запаздывающий привод 112 или 114 может догнать ведущий, благодаря чему обеспечивается синхронизация приводов 112 и 114 и уменьшение вероятности перекоса или крутки закрылка 102 (или иным образом управление величиной перекоса или крутки в допустимых пределах).
[0043] Схожим образом, блок 130 управления сравнивает сигналы, принятые от датчиков 124 и 126. Блок 130 управления определяет, существует ли разность положений и/или скоростей между приводами 116 и 118 на основании сигналов, принятых от датчиков 124 и 126. При отсутствии разности блок 130 управления продолжает управлять приводами 116 и 118 без регулировки. Если, однако, существует разность положений и/или скоростей между приводами 116 и 118, блок 130 управления регулирует движение приводов 116 и 118. Например, если блок 130 управления определяет, что привод 116 находится в продвинутом положении относительно привода 118, блок 130 управления может уменьшать скорость привода 116 до тех пор, пока привод 118 не догонит положение привода 118, и с этого момента блок 130 управления будет управлять приводами 116 и 118 с одной и той же скоростью. Схожим образом, если блок 130 управления определяет, что привод 116 выполняет перемещение с большей скоростью, чем привод 118, блок 130 управления может уменьшать скорость привода 116 до тех пор, пока привод 118 не догонит положение и скорость привода 116, и с этого момента блок 130 управления будет управлять приводами 116 и 118 с одной и той же скоростью.
[0044] По существу, блок 130 управления отслеживает движение приводов 116 и 118 для определения, есть ли запаздывание одного из приводов 116 и 118 относительно другого из приводов 116 и 118. После этого блок 130 управления осуществляет регулировку скорости ведущего привода 116 или 118, так что запаздывающий привод 116 или 118 может догнать ведущий, благодаря чему обеспечивается синхронизация приводов 116 и 118 и уменьшение вероятности перекоса или крутки закрылка 108 (или управление величиной перекоса или крутки иным образом в допустимых пределах).
[0045] Кроме того, блок 130 управления отслеживает движение закрылков 102 и 108 относительно друг друга для обеспечения синхронизированного движения между ними. Как описано выше, блок 130 управления синхронизирует движение приводов 112 и 114, соединенных с закрылком 102, а также движение приводов 116 и 118, соединенных с закрылком 108 для уменьшения вероятности перекоса или крутки закрылков (или иным образом управляет величиной перекоса или крутки в допустимых пределах). Посредством сигналов, принимаемых от датчиков 120, 122, 124 и 126, блок 130 управления определяет положение и скорость каждого закрылка 102 и 108. Блок 130 управления определяет, есть ли разность между положением и/или скоростью закрылков 102 и 108. При отсутствии разности между положением и/или скоростью закрылков 102 и 108 блок 130 управления воздерживается от регулировки движения закрылков 102 и 108. Если, однако, блок 130 управления определяет, что один из закрылков 102 и 108 запаздывает относительно другого из закрылков 102 или 108 (в отношении положения и/или скорости), блок 130 управления регулирует скорость ведущего закрылка 102 или 108, до тех пор, пока запаздывающий закрылок 102 или 108 не догонит ведущий закрылок 102 или 108. Когда запаздывающий закрылок 102 или 108 догонит ведущий закрылок 102 или 108, блок 130 управления будет управлять закрылками 102 и 108 (через соответствующие приводы 112, 114, 116 и 118) с одной и той же скоростью.
[0046] Как описано выше, блок 130 управления связан с возможностью передачи данных с приводами 112, 114, 116, 118 и датчиками 120, 122, 124 и 126. Блок управления принимает сигналы датчиков от датчиков 120 и 112, например. Сигналы датчиков относятся к положению и/или скорости соответствующего привода 112 и 114. Блок 130 управления сравнивает принятые сигналы второго датчика для определения разности между ними. Блок 130 управления регулирует скорость одного или обоих приводов 112 и 114 на основе разности между сигналами первого и второго датчиков. Например, блок 130 управления может уменьшать скорость ведущего привода до тех пор, пока запаздывающий привод не догонит ведущий привод. По меньшей мере еще в одном варианте реализации изобретения блок 130 управления при необходимости может увеличивать скорость запаздывающего привода до тех пор, пока запаздывающий привод не догонит ведущий привод. По меньшей мере еще в одном варианте реализации изобретения блок 130 управления может увеличивать скорость запаздывающего привода и уменьшать скорость ведущего привода до тех пор, пока запаздывающий привод не догонит ведущий привод. Блок 130 управления может управлять приводами 116 и 118 схожим образом.
[0047] Кроме того, блок 130 управления может сравнивать положение и скорость закрылков 102 и 108. Блок 130 управления может уменьшать скорость ведущего закрылка до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок. По меньшей мере еще в одном варианте реализации изобретения блок 130 управления может увеличивать скорость запаздывающего закрылка до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок. По меньшей мере еще в одном варианте реализации изобретения блок 130 управления может увеличивать скорость запаздывающего закрылка и уменьшать скорость ведущего закрылка до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок.
[0048] При использовании в настоящем документе термин "блок управления", "блок", "центральный обрабатывающий блок", "CPU", "компьютер" или т.п. может включать в себя любую систему на основе процессора или микропроцессора, включая системы, использующие микроконтроллеры, компьютеры с сокращенным набором команд (RISC), специализированные интегральные схемы (ASIC), логические схемы и любые другие схемы или процессоры, включающие в себя аппаратные средства, программное обеспечение или их комбинацию, выполненные с возможностью реализации функций, описанных в настоящем документе. Описанные выше примеры являются лишь иллюстративными и не предназначены для ограничения каким-либо образом определения и/или значения таких терминов. Например, блок 130 управления может представлять собой или включать в себя один или более процессоров, выполненных с возможностью управления работой закрылков 102 и 108, как описано выше.
[0049] Блок 130 управления выполнен с возможностью исполнения набора инструкций, которые сохранены в одном или более элементах хранения (таких как запоминающие устройства), чтобы осуществлять обработку данных. Например, блок 130 управления может включать в себя одно или более запоминающих устройств или быть соединенным с одним или более запоминающими устройствами. Элементы хранения могут также хранить данные или другую необходимую или требующуюся информацию. Элемент хранения может быть выполнен в форме источника информации или физического элемента памяти в обрабатывающей машине.
[0050] Набор инструкций может включать в себя различные команды, которые инструктируют блок 130 управления для работы в качестве обрабатывающей машины для выполнения определенных операций, таких как способы и процессы согласно различным вариантам реализации изобретения объекта, описанным в настоящем документе. Набор инструкций может быть выполнен в форме программного обеспечения. Программное обеспечение может быть выполнено в различных формах, таких как системное программное обеспечение или программное обеспечение приложения. Кроме того, программное обеспечение может быть выполнено в виде набора отдельных программ или модулей, программного модуля в составе большой программы или части программного модуля. Программное обеспечение может также включать модульное программирование в форме объектно-ориентированного программирования. Обработка входных данных обрабатывающей машиной может быть проведена в ответ на команды пользователя, или в ответ на результаты предыдущей обработки, или в ответ на запрос, выполненный другой обрабатывающей машиной.
[0051] Схематические изображения вариантов реализации изобретения, представленные в настоящем документе, могут иллюстрировать один или более блоков управления или обработки, таких как блок 130 управления. Необходимо отметить, что блоки управления или обработки могут представлять собой схемы, схемные элементы или их части, которые могут быть реализованы в качестве аппаратных средств с соответствующими инструкциями (например, программное обеспечение, сохраненное на материальном и некратковременном компьютерочитаемом носителе, таком как компьютерный жесткий диск, ПЗУ, ОЗУ или т.п.), которые выполняют операции, описанные в настоящем документе. Аппаратные средства могут включать в себя схему конечного автомата, реализованную аппаратно для выполнения функций, описанных в настоящем документе. В частных вариантах реализации аппаратные средства могут включать в себя электронные схемы, которые включают в себя и/или могут быть подключены к одному или более устройствам, выполненным на основе логических схем, таким как микропроцессоры, процессоры, контроллеры или т.п. В частных вариантах реализации блок 130 управления может представлять собой схему обработки, такую как одно или более из следующего: программируемая вентильная матрица (FPGA), специализированная интегральная схема (ASIC), микропроцессор (микропроцессоры), устройство для квантовых вычислений и/или т.п. Схемы в различных вариантах реализации изобретения могут быть выполнены с возможностью исполнения одного или более алгоритмов для реализации функций, описанных в настоящем документе. Указанные один или более алгоритмов могут включать в себя аспекты вариантов реализации, раскрытых в настоящем документе, независимо от их явного выражения в структурной схеме или способе.
[0052] При использовании в настоящем документе термины "программное обеспечение" и "прошивка" являются взаимозаменяемыми и включают в себя любую компьютерную программу, сохраненную в памяти для выполнения компьютером, в том числе в памяти ОЗУ (RAM), памяти ПЗУ (ROM), памяти СППЗУ (EPROM), памяти ЭСППЗУ (EEPROM) и энергонезависимой памяти ОЗУ (NVRAM). Вышеуказанные типы запоминающих устройств являются только примерными и, таким образом, не ограничивают типы запоминающих устройств, выполненных с возможностью использования для хранения компьютерной программы.
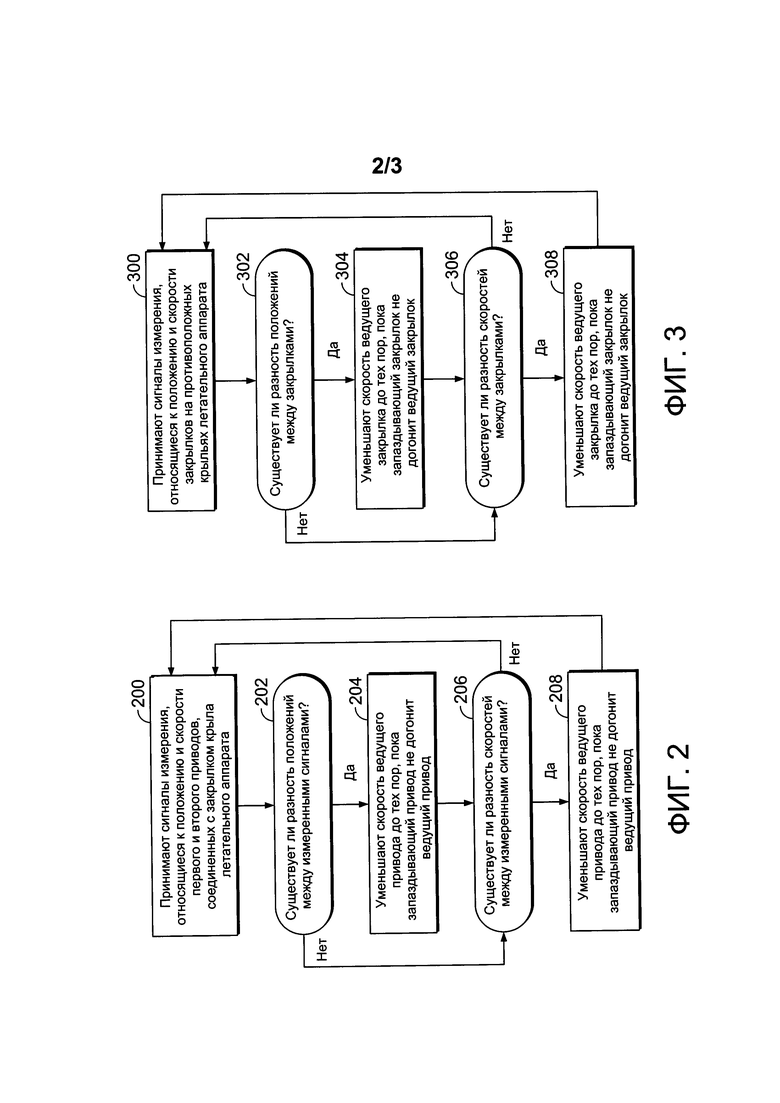
[0053] На ФИГ. 2 показана структурная схема способа синхронизации приводов, соединенных с закрылком крыла летательного аппарата согласно варианту реализации раскрытия настоящего изобретения. Блок 130 управления (показано на ФИГ. 1) может управлять согласно структурной схеме, показанной и описанной в отношении ФИГ. 2.
[0054] Сначала с рукоятки пилота, служащей для управления закрылками, или другого такого устройства ввода вводят команду управления. Затем на этапе 200 принимают сигналы измерения (выдаваемые, например, одним или более датчиками, соединенными с приводами и/или закрылком), относящиеся к положению и скорости первого и второго приводов, соединенных с закрылком крыла, например, блоком 130 управления. На этапе 202 определяют (например, блоком 130 управления), существует ли разность положений между сигналами измерения. Если существует разность положений, скорость ведущего привода уменьшают до тех пор, пока запаздывающий привод не догонит ведущий привод на этапе 204. В частных вариантах реализации скорость запаздывающего привода может быть увеличена до тех пор, пока запаздывающий привод не догонит ведущий привод. По меньшей мере еще в одном варианте реализации изобретения скорость ведущего привода может быть уменьшена, а скорость запаздывающего привода может быть увеличена до тех пор, пока запаздывающий привод не догонит ведущий привод. Затем согласно способу переходят от этапа 204 к этапу 206, на котором определяют, существует ли разность скоростей между сигналами измерения. Если существует разность скоростей между сигналами измерения, согласно способу переходят от этапа 206 к этапу 208, на котором скорость ведущего привода уменьшают до тех пор, пока запаздывающий привод не догонит ведущий привод. В частных вариантах реализации скорость запаздывающего привода может быть увеличена до тех пор, пока запаздывающий привод не догонит ведущий привод. По меньшей мере еще в одном варианте реализации изобретения скорость ведущего привода может быть уменьшена, а скорость запаздывающего привода может быть увеличена до тех пор, пока запаздывающий привод не догонит ведущий привод. Затем согласно способу переходят к этапу 200.
[0055] Если на этапе 202 определяют, что разности положений между сигналами измерения не существует, согласно способу переходят от этапа 202 к этапу 206. Если на этапе 206 определяют, что разности скоростей между сигналами измерения не существует, согласно способу возвращаются к этапу 200.
[0056] На ФИГ. 3 показана структурная схема способа синхронизации закрылков, прикрепленных с возможностью перемещения к крыльям летательного аппарата согласно варианту реализации раскрытия настоящего изобретения. Блок 130 управления (показано на ФИГ. 1) может осуществлять управление согласно структурной схеме, показанной и описанной в отношении ФИГ. 3.
[0057] Сначала с рукоятки пилота, служащей управления закрылками, или другого такого устройства ввода вводят команду управления. Затем на этапе 300 принимают сигналы измерения, относящиеся к положению и скорости закрылков на противоположных крыльях летательного аппарата, например, блоком 130 управления. Блок 130 управления может сравнивать закрылки друг с другом после того, как блок 130 управления синхронизировал приводы, соединенные с каждым закрылком для уменьшения вероятности перекоса или крутки закрылка (или выполнил иное управление величиной перекоса или крутки в допустимых пределах). Например, способ, показанный и описанный для ФИГ. 3, может быть реализован после способа, показанного и описанного для ФИГ. 2, или одновременно с ним. Сигналы измерения могут выводиться датчиками, соединенными с приводами и/или закрылками.
[0058] На этапе 302 определяют (например, с помощью блока 130 управления), существует ли разность положений между закрылками. Положения закрылков могут быть сравнены относительно друг друга (на основе анализа сигналов измерения) для определения, существует ли разность между угловыми, линейными и/или поворотными положениями закрылков. Если существует разность положений между закрылками, согласно способу переходят от этапа 302 к этапу 304, на котором уменьшают скорость ведущего закрылка до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок. В частных вариантах реализации скорость запаздывающего закрылка может быть увеличена до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок. По меньшей мере еще в одном варианте реализации изобретения скорость ведущего закрылка может быть уменьшена, а скорость запаздывающего закрылка может быть увеличена до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок. Затем согласно способу переходят от этапа 304 к этапу 306, на котором определяют, существует ли разность скоростей между закрылками. Если разность скоростей между закрылками существует, согласно способу переходят от этапа 306 к этапу 308, на котором скорость ведущего закрылка уменьшают до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок. В частных вариантах реализации скорость запаздывающего закрылка может быть увеличена до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок. По меньшей мере еще в одном варианте реализации изобретения скорость ведущего закрылка может быть уменьшена, а скорость запаздывающего закрылка может быть увеличена до тех пор, пока запаздывающий закрылок не догонит ведущий закрылок. Затем, согласно способу, возвращаются к этапу 300.
[0059] Если на этапе 302 определяют, что разности положений между закрылками не существует, согласно способу переходят от этапа 302 к этапу 306. Если на этапе 306 определяют, что разности скоростей между закрылками не существует, согласно способу возвращаются к этапу 300.
[0060] Как показано на ФИГ. 1-3, блок 130 управления может сравнивать и регулировать положения и скорости приводов и/или закрылков. Сравнение и регулировка могут иметь место после отслеживания работы систем увеличения подъемной силы на предмет ошибок, например, как описано в патенте US 9,193,479, озаглавленном "Отслеживание систем увеличения подъемной силы для воздушных летательных аппаратов". Блок 130 управления и/или другой контроллер или блок управления могут/может отслеживать работу систем увеличения подъемной силы на предмет ошибок.
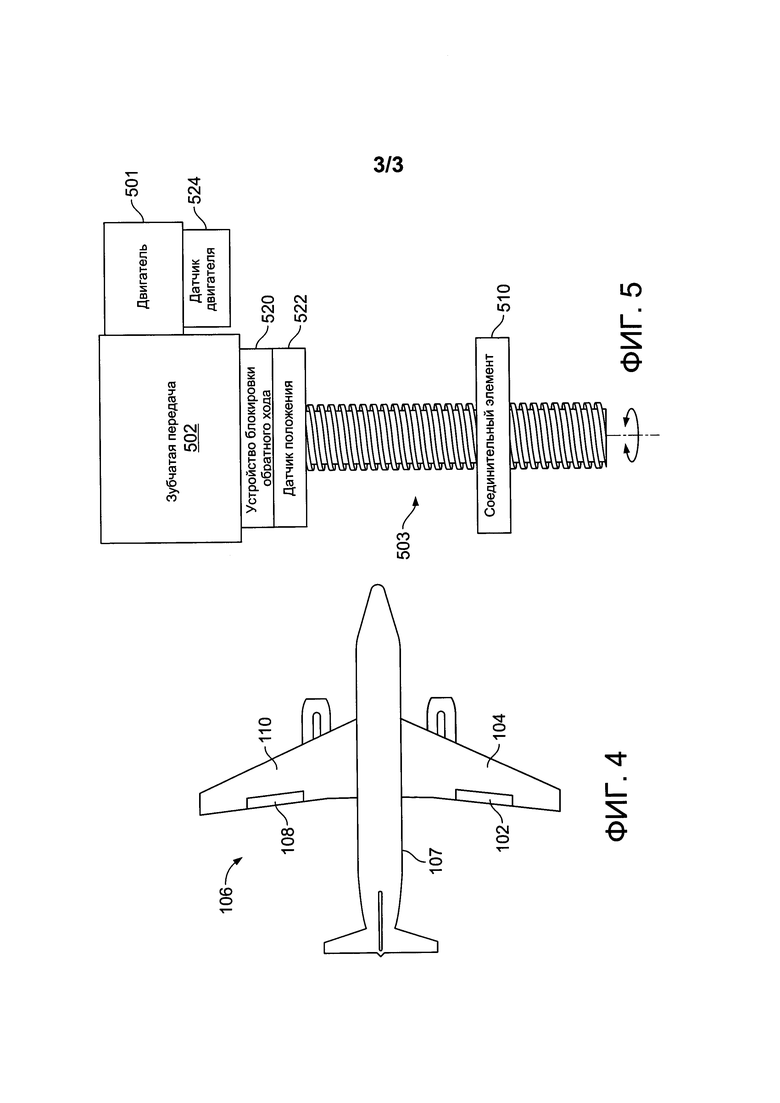
[0061] На ФИГ. 4 схематически показан вид сверху летательного аппарата 106 согласно варианту реализации раскрытия настоящего изобретения. Летательный аппарат 106 включает в себя фюзеляж 107 и крылья 104 и 110, проходящие от соответствующих правой и левой сторон фюзеляжа 107. Крылья 104 и 110 включают в себя выпускаемые закрылки 102 и 108, которые выполнены с возможностью увеличения лобового сопротивления или подъемной силы при выпуске из задних кромок крыльев 104 и 110. Закрылки 102 и 108 являются частью системы увеличения подъемной силы, реализованной в летательном аппарате 106. Хотя на каждом крыле 104 и 110 показан один закрылок, следует понимать, что множество закрылков могут быть установлены на каждом из крыльев 104 и 110.
[0062] Как показано на ФИГ. 1 и 4, блок 130 управления выпускает или убирает закрылки 102 и 108 при получении команд управления от пилота, системы управления полетом и/или т.п. Блок 130 управления может обеспечивать электропитание на каждый из приводов 112, 114, 116 и 118 (электропитание также или альтернативно может быть подано системой электропитания летательного аппарата). Приводы 112, 114, 116и 118 могут иметь электрическое управление и, поэтому, могут называться электромеханическими приводами. Блок 130 управления отслеживает работу приводов 112, 114, 116 и 118 через датчики 120, 122, 124 и 126, которые могут быть встроены в приводы 112, 114, 116 и 118 соответственно.
[0063] На ФИГ. 5 схематически показан привод 500 согласно варианту реализации раскрытия настоящего изобретения. Один или более из приводов 112, 114, 116 и 118 (показано на ФИГ. 1) могут быть выполнены в виде привода 500, который может представлять собой приводную установку.
[0064] Привод 500 может включать в себя электродвигатель 501, зубчатую передачу 502 и приводной винт 503. Двигатель 501 выполнен с возможностью поворота по часовой стрелке или против часовой стрелки при получении сигналов от блока 130 управления (показано на ФИГ. 1). Вращательное движение двигателя 501 приводит к повороту последовательности зубчатых колес в зубчатой передаче 502, что может быть использовано для замедления вращательного движения двигателя 501. Зубчатая передача 502, в свою очередь, передает вращательное движение на приводной винт 503. Приводной винт 503 включает в себя соединительный элемент 510, такой как шаровая гайка и карданный шарнир, который перемещается вверх или вниз вдоль приводного винта 503 при повороте приводного винта 503. Таким образом, приводной винт 503 преобразует вращательное движение двигателя 501 и зубчатой передачи 502 в линейное движение соединительного элемента 510. Хотя на ФИГ. 5 это не показано, соединительный элемент 510 выполнен с возможностью прикрепления к одному концу рычага (не показано), а другой конец рычага соединен со стороной закрылка. Таким образом, когда соединительный элемент 510 перемещается вверх и вниз на приводном винте 503, это движение заставляет двигаться рычаг для выпуска или уборки закрылка.
[0065] Привод 500 может также включать в себя устройство 520 блокировки обратного хода. Устройство 520 блокировки обратного хода действует в качестве тормоза, чтобы обеспечить необратимость хода закрылка, если привод 500 отсоединится от закрылка. Например, если двигатель 501 не работает, включается устройство 520 блокировки обратного хода, чтобы не допустить перемещение закрылка.
[0066] Привод 500 может также включать в себя встроенный датчик 522 положения. Датчик 522 положения может быть расположен между устройством 520 блокировки обратного хода и закрылком и отслеживает итоговое положение привода 500 (например, угол поворота приводного винта 503). Альтернативно датчик 522 положения может быть установлен на соединительном элементе 510 и/или непосредственно прикреплен к закрылку.
[0067] Привод 500 может также включать в себя датчик 524 двигателя. Датчик 524 двигателя может быть выполнен с возможностью отслеживания потребления тока или нагрузки на двигатель 501. Датчик 524 двигателя также может отслеживать положение и/или скорость двигателя 501. Положение двигателя 501 может быть указано количеством поворотов в прямом или обратном направлении, например, с помощью датчика Холла или датчика поворота.
[0068] Как показано на ФИГ. 1-5, варианты реализации раскрытия настоящего изобретения обеспечивают создание систем и способов, которыми синхронизируют перемещение закрылков одного или более крыльев летательного аппарата. Варианты реализации раскрытия настоящего изобретения обеспечивают создание систем и способов, которыми предотвращают или минимизируют перекос или крутку закрылка во время работы или иным образом уменьшают вероятность такого перекоса. Варианты реализации раскрытия настоящего изобретения обеспечивают создание систем и способов, которыми предотвращают, минимизируют или иным образом уменьшают рассогласование между крыльями в отношении системы закрылков летательного аппарата. Варианты реализации раскрытия настоящего изобретения могут быть использованы для управления отклоняемыми носками и/или закрылками задней кромки.
[0069] При использовании в настоящем документе конструкция, ограничение или элемент, который "выполнен с возможностью" выполнения задания или операции, конструктивно выполнен, изготовлен или приспособлен конкретно таким образом, чтобы он соответствовал этому заданию или этой операции. Для целей пояснения и во избежание недоразумений, при использовании в настоящем документе, объект, который просто обладает способностью изменения для выполнения задания или операции, не является "выполненным с возможностью" выполнения этого задания или этой операции.
[0070] Следует понимать, что представленное выше описание предназначается для иллюстрации и не является ограничительным. Например, описанные выше варианты реализации (и/или их аспекты) могут быть использованы в комбинации друг с другом. В дополнение, для адаптации к конкретной ситуации или материалу может быть выполнено множество модификаций идей различных вариантов реализации изобретения без отхода его сущности. Хотя размеры и типы материалов, описанные в настоящем документе, предназначены для задания параметров различных вариантов реализации данного раскрытия, указанные варианты реализации никоим образом не являются ограничительными и представляют собой примерные варианты реализации. Специалистам в данной области техники при рассмотрении приведенного выше описания будут очевидны многие другие варианты реализации. Следовательно, объем различных вариантов реализации настоящего изобретения должен быть определен со ссылкой на прилагаемую формулу изобретения вместе с полным объемом эквивалентов, на которые такая формула изобретения имеет право. В прилагаемой формуле изобретения выражения "включающий в себя" и "в котором" (in which) использованы в качестве простых английских эквивалентов соответствующих выражений "содержащий/включающий" и "в котором" (wherein). Более того, выражения "первый", "второй" и "третий" и т.п. использованы только в качестве обозначений и не предназначены для наложения численных требований к их объектам. Кроме того, ограничения следующей формулы изобретения не записаны в формате "средство-плюс-функция" и не предназначены для интерпретации на основе раздела 35 U.S.C. § 112(f), если только для таких ограничений формулы изобретения явным образом не используется выражение "средство для", за которым следует изложение функции без последующей структуры.
Кроме того, изобретение включает в себя варианты осуществления согласно следующим пунктам:
Пункт 1. Система управления одним или более закрылками летательного аппарата, содержащая:
- первый закрылок, прикрепленный с возможностью перемещения к первому крылу летательного аппарата и выполненный с возможностью перемещения между выпущенным положением и убранным положением;
- первый привод, соединенный с первым закрылком;
- первый датчик, соединенный с первым приводом и выполненный с возможностью определения положения и/или скорости первого привода и вывода сигнала первого датчика, который относится к положению и/или скорости первого привода;
- второй привод, соединенный с первым закрылком;
- второй датчик, соединенный со вторым приводом и выполненный с возможностью определения положения и/или скорости второго привода и вывода сигнала второго датчика, который относится к положению и/или скорости второго привода и
- блок управления, связанный с возможностью передачи данных с первым приводом, первым датчиком, вторым приводом и вторым датчиком, причем блок управления выполнен с возможностью:
приема сигналов первого и второго датчиков от первого и второго датчиков, соответственно;
сравнения сигналов первого и второго датчиков для определения разности между сигналами первого и второго датчиков и
регулировки скорости одного или обоих из первого или второго приводов на основе разности между сигналами первого и второго датчиков.
Пункт 2. Система по пункту 1, в которой блок управления выполнен с возможностью регулировки скорости первого и/или второго приводов путем уменьшения скорости ведущего привода из первого и второго приводов, который обгоняет запаздывающий привод из первого и второго приводов, до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов.
Пункт 3. Система по пунктам 1 или 2, в которой блок управления выполнен с возможностью регулировки скорости первого и/или второго приводов путем увеличения скорости запаздывающего привода из первого и второго приводов, который запаздывает относительно ведущего привода из первого и второго приводов, до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов.
Пункт 4. Система по пунктам 1, 2 или 3, в которой блок управления выполнен с возможностью регулировки скорости первого и/или второго приводов путем уменьшения скорости ведущего привода из первого и второго приводов, который обгоняет запаздывающий привод из первого и второго приводов, и увеличения скорости запаздывающего привода из первого и второго приводов до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов.
Пункт 5. Система по пунктам 1, 2, 3 или 4, также содержащая:
- второй закрылок, прикрепленный с возможностью перемещения ко второму крылу летательного аппарата и выполненный с возможностью перемещения между выпущенным положением и убранным положением;
- третий привод, соединенный со вторым закрылком;
- третий датчик, соединенный с третьим приводом и выполненный с возможностью определения положения и/или скорости третьего привода и вывода сигнала третьего датчика, относящегося к положению и/или скорости третьего привода;
- четвертый привод, соединенный со вторым закрылком;
- четвертый датчик, соединенный с четвертым приводом и выполненный с возможностью определения положения и/или скорости четвертого привода и вывода сигнала четвертого датчика, относящегося к положению и/или скорости четвертого привода,
причем блок управления связан с возможностью передачи данных с третьим приводом, третьим датчиком, четвертым приводом и четвертым датчиком, при этом блок управления также выполнен с возможностью:
приема сигналов третьего и четвертого датчиков от третьего и четвертого датчиков, соответственно;
сравнения сигналов третьего и четвертого датчиков для определения разности между сигналами третьего и четвертого датчиков и
регулировки скорости одного или обоих третьего или четвертого приводов на основе разности между сигналами третьего и четвертого датчиков.
Пункт 6. Система по пункту 5, в которой блок управления выполнен с возможностью:
определения разности между скоростью и/или положением первого и второго закрылков и
регулировки скорости первого и/или второго закрылков на основе разности между скоростью и/или положением первого и второго закрылков.
Пункт 7. Система по пункту 6, в которой блок управления выполнен с возможностью определения разности между скоростью и/или положением первого и второго закрылков путем анализа сигналов первого, второго, третьего и четвертого датчиков.
Пункт 8. Система по пунктам 6 или 7, в которой блок управления выполнен с возможностью регулировки скорости первого и/или второго закрылков путем уменьшения скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
Пункт 9. Система по пунктам 6, 7 или 8, в которой блок управления выполнен с возможностью регулировки скорости первого и/или второго закрылков путем увеличения скорости запаздывающего закрылка из первого и второго закрылков, который запаздывает относительно ведущего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
Пункт 10. Система по пунктам 6, 7, 8 или 9, в которой блок управления выполнен с возможностью регулировки скорости первого и/или второго закрылков путем уменьшения скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, и увеличения скорости запаздывающего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
Пункт 11. Способ управления одним или более закрылками летательного аппарата, включающий:
прием сигналов первого и второго датчиков от соответствующих первого и второго датчиков, соединенных с соответствующими первым и вторым приводами, которые прикреплены с возможностью перемещения к первому закрылку первого крыла летательного аппарата, причем сигналы первого и второго датчиков относятся к положению и/или скорости соответствующих первого и второго приводов;
сравнение сигналов первого и второго датчиков для определения разности между сигналами первого и второго датчиков и
регулировку скорости одного или обоих из первого или второго приводов на основе разности между сигналами первого и второго датчиков.
Пункт 12. Способ по пункту 11, согласно которому операция регулировки включает уменьшение скорости ведущего привода из первого и второго приводов, который обгоняет запаздывающий привод из первого и второго приводов, до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов.
Пункт 13. Способ по пунктам 11 или 12, согласно которому операция регулировки включает увеличение скорости запаздывающего привода из первого и второго приводов, который запаздывает относительно ведущего привода из первого и второго приводов, до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов.
Пункт 14. Способ по пунктам 11, 12 или 13, согласно которому операция регулировки включает:
уменьшение скорости ведущего привода из первого и второго приводов, который обгоняет запаздывающий привод из первого и второго приводов; и
увеличение скорости запаздывающего привода из первого и второго приводов до тех пор, пока запаздывающий привод из первого и второго приводов не догонит ведущий привод из первого и второго приводов.
Пункт 15. Способ по пунктам 11, 12, 13 или 14, также включающий:
прием сигналов третьего и четвертого датчиков от соответствующих третьего и четвертого датчиков, соединенных с соответствующими третьим или четвертым приводами, которые прикреплены с возможностью перемещения ко второму закрылку второго крыла летательного аппарата, причем сигналы третьего и четвертого датчиков относятся к положению и/или скорости соответствующих третьего или четвертого приводов;
сравнение сигналов третьего и четвертого датчиков для определения разности между сигналами третьего и четвертого датчиков и
регулировку скорости одного или обоих третьего или четвертого приводов на основе разности между сигналами третьего и четвертого датчиков.
Пункт 16. Способ по пункту 15, также включающий:
определение разности между скоростью и/или положением первого и второго закрылков и
регулировку скорости первого и/или второго закрылков на основе разности между скоростью и/или положением из первого и второго закрылков.
Пункт 17. Способ по пунктам 15 или 16, согласно которому операция определения разности между скоростью и/или положением из первого и второго закрылков включает анализ сигналов первого, второго, третьего и четвертого датчиков.
Пункт 18. Способ по пунктам 15, 16 или 17, согласно которому операция регулировки скорости первого и/или второго закрылков включает уменьшение скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
Пункт 19. Способ по пунктам 15, 16, 17 или 18, согласно которому операция регулировки скорости первого и/или второго закрылков включает увеличение скорости запаздывающего закрылка из первого и второго закрылков, который запаздывает относительно ведущего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
Пункт 20. Способ по пунктам 15, 16, 17, 18 или 19, согласно которому операция регулировки скорости первого и/или второго закрылков включает:
уменьшение скорости ведущего закрылка из первого и второго закрылков, который обгоняет запаздывающий закрылок из первого и второго закрылков, и
увеличение скорости запаздывающего закрылка из первого и второго закрылков, до тех пор, пока запаздывающий закрылок из первого и второго закрылков не догонит ведущий закрылок из первого и второго закрылков.
В настоящем письменном описании используются примеры для раскрытия различных вариантов реализации настоящего изобретения, включая наилучший вариант, а также любому специалисту в данной области техники обеспечивается возможность применения на практике различных вариантов реализации настоящего раскрытия, включая выполнение и использование любых устройств или систем и использование любых включенных способов. Патентоспособный объем различных вариантов реализации раскрытия определяется формулой изобретения и может включать в себя другие примеры, которые окажутся очевидными для специалистов в данной области техники. Такие другие примеры предназначены для включения в пределы объема формулы изобретения, если указанные примеры имеют структурные элементы, которые не отличаются от буквального изложения формулы изобретения, или если указанные примеры включают в себя эквивалентные структурные элементы, которые имеют несущественные отличия от буквального изложения формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2737766C2 |
| СПОСОБ ОГРАНИЧЕНИЯ СИЛОВОЙ НАГРУЗКИ В ПРИВОДНЫХ СИСТЕМАХ ДЛЯ СИСТЕМ УВЕЛИЧЕНИЯ ПОДЪЕМНОЙ СИЛЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2360844C2 |
| УЗЕЛ ОТКЛОНЯЕМОГО НОСКА КРЫЛА | 1996 |
|
RU2181332C2 |
| СИСТЕМА УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКИМИ ПОВЕРХНОСТЯМИ | 2002 |
|
RU2296694C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С АЭРОДИНАМИЧЕСКИМ ЭЛЕМЕНТОМ И СПОСОБ ЕГО ПОЛЕТА | 2012 |
|
RU2597046C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЛАВНЫМ УВЕЛИЧЕНИЕМ ТЯГИ ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, КОМПЬЮТЕРОЧИТАЕМЫЙ НОСИТЕЛЬ ДАННЫХ | 2017 |
|
RU2735650C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2419576C2 |
| УПРАВЛЕНИЕ АЭРОДИНАМИЧЕСКИМИ НАГРУЗКАМИ НА СКЛАДЫВАЮЩИХСЯ ЗАКОНЦОВКАХ КРЫЛЬЕВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2731186C2 |
| Способ управления воздушным судном, система управления и воздушное судно | 2017 |
|
RU2688559C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
Группа изобретений относится к системе и способу управления одним или более закрылками летательного аппарата. Система управления содержит два закрылка, выполненные с возможностью перемещения к крылу летательного аппарата, два привода, соединенные с закрылком, два датчика, определяющие положение или скорость приводов, блок управления. Для управления закрылками летательного аппарата принимают сигналы от датчиков положения или скорости приводов, сравнивают сигналы первого и второго датчиков, регулируют скорость одного или обоих датчиков на основе разницы сигналов. Обеспечивается предотвращение или минимизация перекоса или крутки закрылков во время работы. 2 н.п. и 18 з.п. ф-лы, 5 ил. 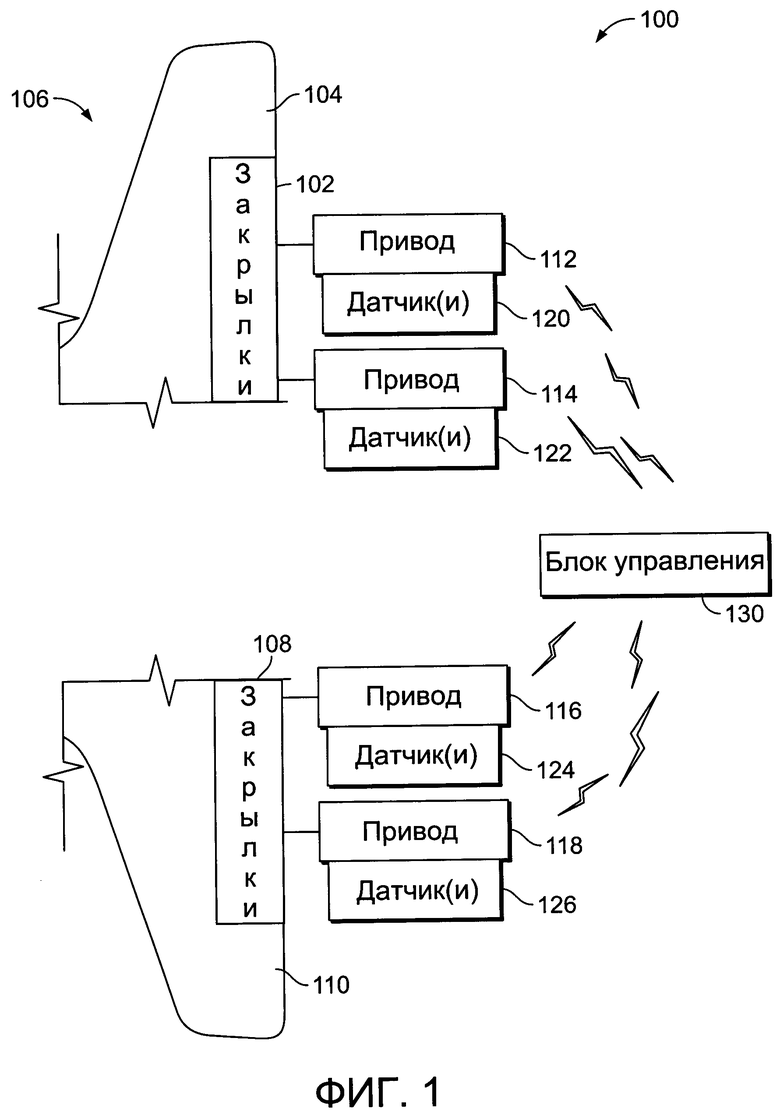
1. Система управления одним или более закрылками летательного аппарата (106), содержащая:
- первый закрылок (102), прикрепленный с возможностью перемещения к первому крылу (104) летательного аппарата (106) и выполненный с возможностью перемещения между выпущенным положением и убранным положением;
- первый привод (112), соединенный с первым закрылком (102);
- первый датчик (120), соединенный с первым приводом (112) и выполненный с возможностью определения положения и/или скорости первого привода (112) и вывода сигнала первого датчика, который относится к положению и/или скорости первого привода (112);
- второй привод (114), соединенный с первым закрылком (102);
- второй датчик (122), соединенный со вторым приводом (114) и выполненный с возможностью определения положения и/или скорости второго привода (114) и вывода сигнала второго датчика, который относится к положению и/или скорости второго привода (114) и
- блок (130) управления, связанный с возможностью передачи данных с первым приводом (112), первым датчиком (120), вторым приводом (114) и вторым датчиком (122) и выполненный с возможностью:
приема сигналов первого и второго датчиков от первого и второго датчиков (120, 122) соответственно;
сравнения сигналов первого и второго датчиков для определения разности между сигналами первого и второго датчиков и
регулировки скорости одного или обоих из первого или второго приводов (112, 114) на основе разности между сигналами первого и второго датчиков.
2. Система по п. 1, в которой блок (130) управления выполнен с возможностью регулировки скорости первого и/или второго приводов (112, 114) путем уменьшения скорости ведущего привода из первого и второго приводов (112, 114), который обгоняет запаздывающий привод из первого и второго приводов (112, 114), до тех пор, пока запаздывающий привод из первого и второго приводов (112, 114) не догонит ведущий привод из первого и второго приводов (112, 114).
3. Система по п. 1, в которой блок (130) управления выполнен с возможностью регулировки скорости первого и/или второго приводов (112, 114) путем увеличения скорости запаздывающего привода из первого и второго приводов (112, 114), который запаздывает относительно ведущего привода из первого и второго приводов (112, 114), до тех пор, пока запаздывающий привод из первого и второго приводов (112, 114) не догонит ведущий привод из первого и второго приводов (112, 114).
4. Система по п. 1, в которой блок (130) управления выполнен с возможностью регулировки скорости первого и/или второго приводов (112, 114) путем уменьшения скорости ведущего привода из первого и второго приводов (112, 114), который обгоняет запаздывающий привод из первого и второго приводов (112, 114), и увеличения скорости запаздывающего привода из первого и второго приводов (112, 114) до тех пор, пока запаздывающий привод из первого и второго приводов (112, 114) не догонит ведущий привод из первого и второго приводов (112, 114).
5. Система (100) по п. 1, также содержащая:
- второй закрылок (108), прикрепленный с возможностью перемещения ко второму крылу (110) летательного аппарата (106) и выполненный с возможностью перемещения между выпущенным положением и убранным положением;
- третий привод (116), соединенный со вторым закрылком (108);
- третий датчик (124), соединенный с третьим приводом (116) и выполненный с возможностью определения положения и/или скорости третьего привода (116) и вывода сигнала третьего датчика, относящегося к положению и/или скорости третьего привода (116);
- четвертый привод (118), соединенный со вторым закрылком (108);
- четвертый датчик (126), соединенный с четвертым приводом (118) и выполненный с возможностью определения положения и/или скорости четвертого привода (118) и вывода сигнала четвертого датчика, относящегося к положению и/или скорости четвертого привода (118),
причем блок (130) управления связан с возможностью передачи данных с третьим приводом (116), третьим датчиком (124), четвертым приводом (118) и четвертым датчиком (126), а также выполнен с возможностью:
приема сигналов третьего и четвертого датчиков от третьего и четвертого датчиков (124, 126) соответственно;
сравнения сигналов третьего и четвертого датчиков для определения разности между сигналами третьего и четвертого датчиков и
регулировки скорости одного или обоих третьего или четвертого приводов (116, 118) на основе разности между сигналами третьего и четвертого датчиков.
6. Система по п. 5, в которой блок (130) управления выполнен с возможностью:
определения разности между скоростью и/или положением первого и второго закрылков (102, 108) и
регулировки скорости первого и/или второго закрылков (102, 108) на основе разности между скоростью и/или положением первого и второго закрылков (102, 108).
7. Система по п. 6, в которой блок (130) управления выполнен с возможностью определения разности между скоростью и/или положением первого и второго закрылков (102, 108) путем анализа сигналов первого, второго, третьего и четвертого датчиков.
8. Система по п. 6, в которой блок (130) управления выполнен с возможностью регулировки скорости первого и/или второго закрылков (102, 108) путем уменьшения скорости ведущего закрылка из первого и второго закрылков (102, 108), который обгоняет запаздывающий закрылок из первого и второго закрылков (102, 108), до тех пор, пока запаздывающий закрылок из первого и второго закрылков (102, 108) не догонит ведущий закрылок из первого и второго закрылков (102, 108).
9. Система по п. 6, в которой блок (130) управления выполнен с возможностью регулировки скорости первого и/или второго закрылков (102, 108) путем увеличения скорости запаздывающего закрылка из первого и второго закрылков (102, 108), который запаздывает относительно ведущего закрылка из первого и второго закрылков (102, 108), до тех пор, пока запаздывающий закрылок из первого и второго закрылков (102, 108) не догонит ведущий закрылок из первого и второго закрылков (102, 108).
10. Система по п. 6, в которой блок (130) управления выполнен с возможностью регулировки скорости первого и/или второго закрылков (102, 108) путем уменьшения
скорости ведущего закрылка из первого и второго закрылков (102, 108), который обгоняет запаздывающий закрылок из первого и второго закрылков (102, 108) и увеличения скорости запаздывающего закрылка из первого и второго закрылков (102, 108), до тех пор, пока запаздывающий закрылок из первого и второго закрылков (102, 108) не догонит ведущий закрылок из первого и второго закрылков (102, 108).
11. Способ управления одним или более закрылками летательного аппарата, включающий:
прием сигналов первого и второго датчиков от соответствующих первого и второго датчиков (120, 122), соединенных с соответствующими первым и вторым приводами (112, 114), которые прикреплены с возможностью перемещения к первому закрылку (102) первого крыла (104) летательного аппарата (106), причем сигналы первого и второго датчиков относятся к положению и/или скорости соответствующих первого и второго приводов (112, 114);
сравнение сигналов первого и второго датчиков для определения разности между сигналами первого и второго датчиков и
регулировку скорости одного или обоих из первого или второго приводов (112, 114) на основе разности между сигналами первого и второго датчиков.
12. Способ по п. 11, согласно которому операция регулировки включает уменьшение скорости ведущего привода из первого и второго приводов (112, 114), который обгоняет запаздывающий привод из первого и второго приводов (112, 114), до тех пор, пока запаздывающий привод из первого и второго приводов (112, 114) не догонит ведущий привод из первого и второго приводов (112, 114).
13. Способ по п. 11, согласно которому операция регулировки включает увеличение скорости запаздывающего привода из первого и второго приводов (112, 114), который запаздывает относительно ведущего привода из первого и второго приводов (112, 114), до тех пор, пока запаздывающий привод из первого и второго приводов (112, 114) не догонит ведущий привод из первого и второго приводов (112, 114).
14. Способ по п. 11, согласно которому операция регулировки включает:
уменьшение скорости ведущего привода из первого и второго приводов (112, 114), который обгоняет запаздывающий привод из первого и второго приводов (112, 114), и
увеличение скорости запаздывающего привода из первого и второго приводов (112, 114) до тех пор, пока запаздывающий привод из первого и второго приводов (112, 114) не догонит ведущий привод из первого и второго приводов (112, 114).
15. Способ по п. 11, также включающий:
прием сигналов третьего и четвертого датчиков от соответствующих третьего и четвертого датчиков (124, 126), соединенных с соответствующими третьим или четвертым приводами (116, 118), которые прикреплены с возможностью перемещения ко второму закрылку (108) второго крыла (110) летательного аппарата (106), причем сигналы третьего и четвертого датчиков относятся к положению и/или скорости соответствующих третьего или четвертого приводов (116, 118);
сравнение сигналов третьего и четвертого датчиков для определения разности между сигналами третьего и четвертого датчиков и
регулировку скорости одного или обоих третьего или четвертого приводов (116, 118) на основе разности между сигналами третьего и четвертого датчиков.
16. Способ по п. 15, также включающий:
определение разности между скоростью и/или положением первого и второго закрылков (102, 108) и
регулировку скорости первого и/или второго закрылков (102, 108) на основе разности между скоростью и/или положением первого и второго закрылков (102, 108).
17. Способ по п. 15, согласно которому операция определения разности между скоростью и/или положением первого и второго закрылков (102, 108) включает анализ сигналов первого, второго, третьего и четвертого датчиков.
18. Способ по п. 15, согласно которому операция регулировки скорости первого и/или второго закрылков (102, 108) включает уменьшение скорости ведущего закрылка из первого и второго закрылков (102, 108), который обгоняет запаздывающий закрылок из первого и второго закрылков (102, 108), до тех пор, пока запаздывающий закрылок из
первого и второго закрылков (102, 108) не догонит ведущий закрылок из первого и второго закрылков (102, 108).
19. Способ по п. 15, согласно которому операция регулировки скорости первого и/или второго закрылков (102, 108) включает увеличение скорости запаздывающего закрылка из первого и второго закрылков (102, 108), который запаздывает относительно ведущего закрылка из первого и второго закрылков (102, 108), до тех пор, пока запаздывающий закрылок из первого и второго закрылков (102, 108) не догонит ведущий закрылок из первого и второго закрылков (102, 108).
20. Способ по п. 15, согласно которому операция регулировки скорости первого и/или второго закрылков (102, 108) включает:
уменьшение скорости ведущего закрылка из первого и второго закрылков (102, 108), который обгоняет запаздывающий закрылок из первого и второго закрылков (102, 108), и
увеличение скорости запаздывающего закрылка из первого и второго закрылков (102, 108) до тех пор, пока запаздывающий закрылок из первого и второго закрылков (102, 108) не догонит ведущий закрылок из первого и второго закрылков (102, 108).
| УСТРОЙСТВО КОНТРОЛЯ ЗА СИНХРОННОСТЬЮ ЗАКРЫЛКОВ САМОЛЕТНОГО КРЫЛА | 2008 |
|
RU2475423C2 |
| СПОСОБ УПРАВЛЕНИЯ УБОРКОЙ МЕХАНИЗАЦИИ КРЫЛА САМОЛЕТА ТРАНСПОРТНОЙ КАТЕГОРИИ | 2012 |
|
RU2494922C1 |
| US 0009193479 B2, 24.11.2015 | |||
| US 0007051975 B2, 30.05.2006 | |||
| US 0009190942 B2, 17.11.2015. | |||

