ОБЛАСТЬ ТЕХНИЧЕСКОГО ПРИМЕНЕНИЯ
Настоящее изобретение относится к регулятору воздушного потока, выполненному по типу жалюзей. Регулятор находит конкретное применение в шахтных стволах, тоннелях, штольнях, выработках и т.д. (далее «шахтные каналы») для управления проходящим через них воздушным потоком или для его регулирования.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Подземные шахты могут иметь ряд штолен, которые действуют в качестве воздухопроводов для свежего воздуха и формируются с той стороны от рудного тела, где осуществляют забор воздуха, и со стороны возврата воздуха или с противоположной стороны от рудного тела. Далее воздушным потоком на разных уровнях шахты управляют посредством регуляторов воздушного потока, расположенных, помимо прочего, на входах или выходах этих штолен.
Известные регуляторы воздушного потока, используемые в шахтах, относятся к регуляторам с опускаемыми досками и находятся в эксплуатации на протяжении определенного времени. Также известны регуляторы воздушного потока, включающие в себя вертикальные жалюзи, установленные с возможностью поворота в стальной раме.
Регуляторы с опускаемыми досками могут содержать стальную раму с Н-образным сечением, изготавливаемую с отделениями обычного размера. В каждом отделении доски из древесины твердых пород опускают между фланцами Н-образного сечения. При этом отверстие регулятора можно регулировать по площади, тем самым изменяя величину воздушного потока, который может поступать к данному участку шахты.
Регуляторы с опускаемыми досками требуют ручного регулирования. Кроме того, перед определенным событием, например, перед проведением взрывных работ или созданием воздушной волны в очистном забое, когда, как предполагают, взрыв может повредить регулятор, шахтер должен физически удалить все доски, что представляет собой тяжелую работу, требующую напряжения и затрат времени. Значительные взрывные работы в очистном забое могут привести к тому, что большие объемы воздуха с силой подаются через шахтные каналы, при этом создаваемые давления достаточны для того, чтобы надолго повредить вентиляционные конструкции шахты.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Согласно изобретению создан регулятор воздушного потока типа жалюзей для канала шахты, содержащий множество пластин жалюзей, приспособленных для установки в раме и поворота в ней вокруг продольной оси между заданным положением, в котором пластины жалюзей объединены для закрывания или ограничения части канала, и открытым положением для прохождения воздуха между пластинами жалюзей и через канал, наклонный механизм для воздействия на каждую пластину жалюзей таким образом, что при использовании каждая пластина жалюзей приспособлена удерживаться в заданном положении до достижения заданного потока воздуха к пластинам, при этом наклонный механизм представляет собой распорный механизм, способный действовать на каждую пластину жалюзей для ее поворота в заданное положение и представляющий собой газовую распорку, соединенную с рычажным механизмом, действующим на пластины жалюзей, для их перемещения в заданное положение, при этом при заданном воздушном потоке пластины жалюзей способны действовать на рычажный механизм, который способен действовать на газовую распорку при перемещении каждой пластины жалюзей к открытому положению.
Заданное положение пластин может соответствовать закрытому или частично открытому положению пластин, а открытое положение пластин соответствует полностью открытому положению пластин.
Соединение между газовой распоркой и рычажным механизмом может быть выполнено с возможностью регулирования таким образом, что пластины жалюзей способны полностью или частично закрываться под действием газовой распорки.
Регулятор может дополнительно содержать механизм управления для отдельного и независимого управления положением каждой пластины жалюзей в течение нормального воздушного потока в канале шахты, при этом наклонный механизм не мешает управлению нормальным воздушным потоком, и механизм управления не мешает открыванию пластин жалюзей при заданном воздушном потоке или возврату пластин наклонным механизмом в заданное положение.
Управляющий механизм может содержать механизм ручного регулирования или регулировочный механизм с дистанционным управлением.
В регулировочном механизме с дистанционным управлением могут быть использованы исполнительные устройства, приводимые в действие электрически и управляемые дистанционно через волоконно-оптическую коммуникационную систему.
Регулятор может дополнительно содержать множество монтажных пальцев/болтов, проходящих от рамы и предназначенных для крепления по отношению к смежной стене канала шахты.
В регуляторе могут быть использованы пальцы использованы для крепления опалубки, обеспечивающей опору для нанесения цементирующего связующего, при этом пальцы/болты, опалубка и связующее в дальнейшем обеспечивают конструктивную стену для удерживания рамы в канале.
Рама может формировать часть модуля, множество которых приспособлено устанавливаться в большей раме, расположенной в канале. Каждый модуль может иметь множество избирательно удлиняемых крепежных пальцев, расположенных вокруг его периферии таким образом, что при установке модуля в большую раму канала удлинение крепежных пальцев обеспечивает крепление модуля к раме канала, а отведение крепежных пальцев обеспечивает возможность отделения модуля от рамы канала. Каждый модуль может иметь образованные в нем места для подъема, обеспечивающие возможность его подъема для ввода в раму и вывода из нее.
Регулятор может дополнительно содержать стопор для предотвращения поворотного перемещения пластин за открытое положение. Стопор может содержать демпфер или амортизатор.
Пластины при их использовании могут проходить в раме, в общем, по горизонтали.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Несмотря на какие-либо иные варианты, которые относятся к регулятору воздушного потока типа жалюзей, определенному в разделе «Краткое изложение существа изобретения», далее лишь в качестве примера описаны конкретные варианты осуществления регулятора, со ссылками на прилагаемые фигуры, на которых изображено следующее:
фигура 1 представляет вид спереди регулятора типа жалюзей;
фигура 2 представляет вид спереди модуля регулятора типа жалюзей для использования в регуляторе, показанном на фигуре 1;
фигуры 3А и 3В, соответственно, изображают схематические виды регулятора типа жалюзей в закрытой и открытой конфигурациях, и проиллюстрировано действие весового механизма, предназначенного для регулятора;
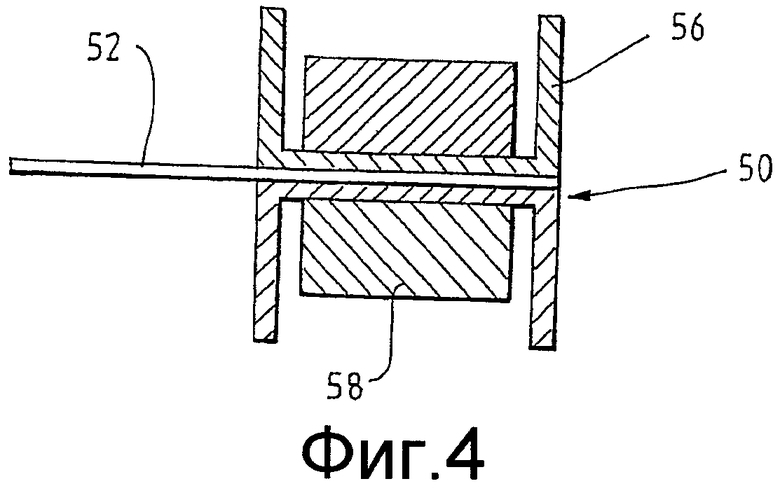
фигура 4 представляет схематический вид в плане весового механизма согласно фигуре 3;
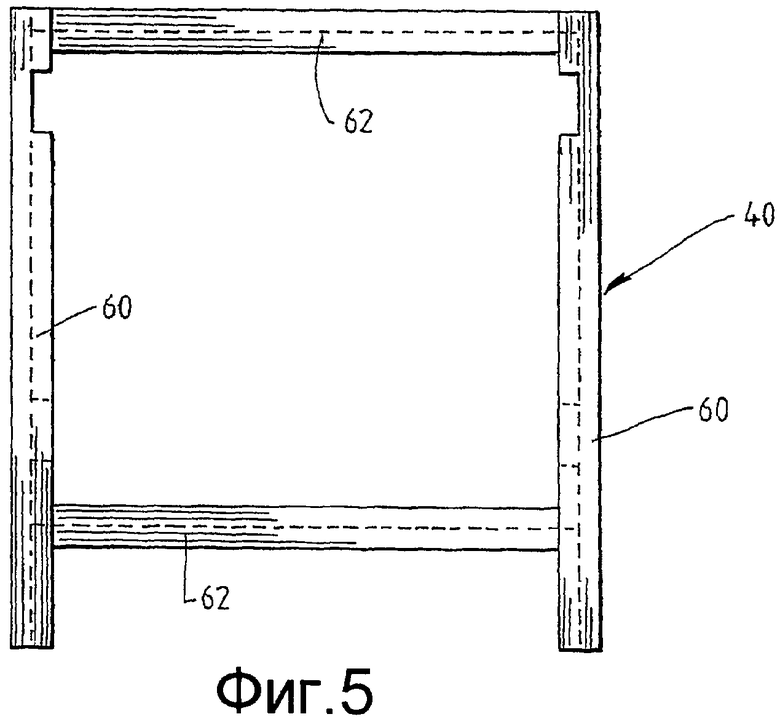
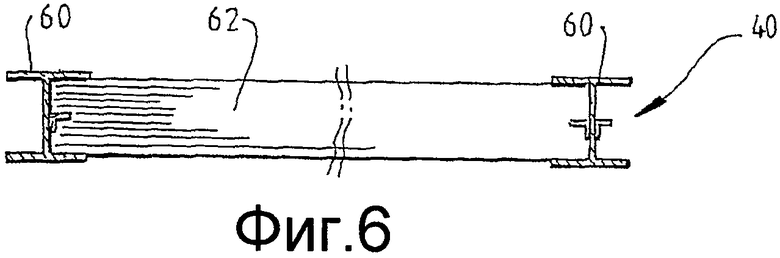
фигуры 5 и 6, соответственно, показывают виды спереди и в плане рамы регулятора с опускаемыми досками, пригодной для размещения одного или более модулей регулятора типа жалюзей;
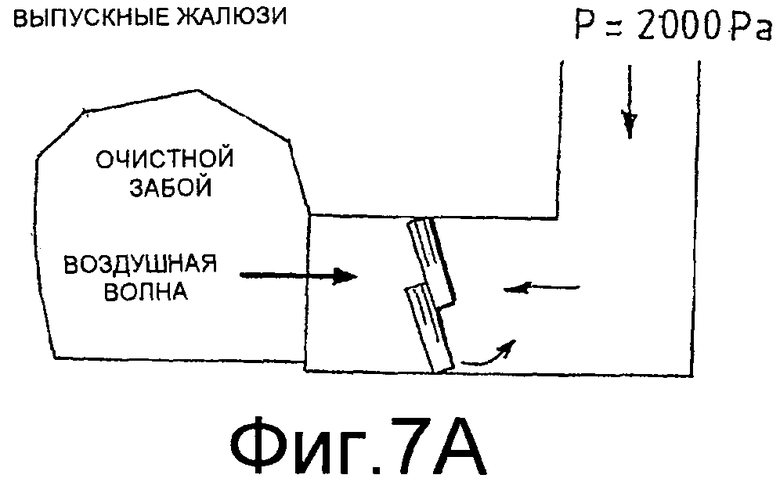
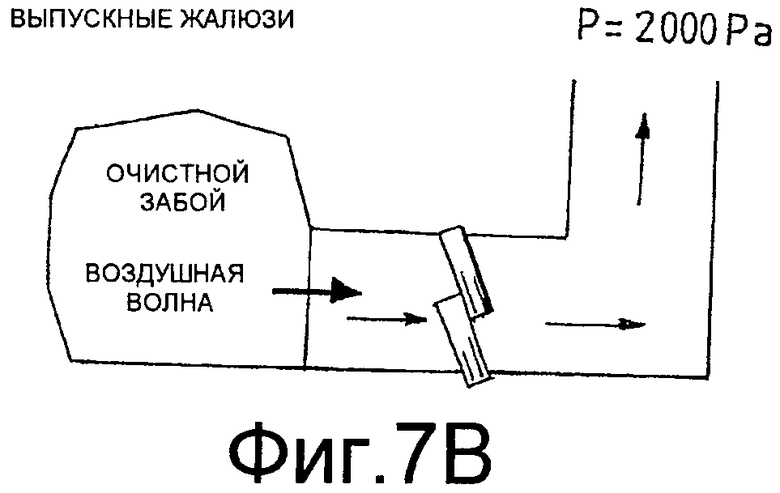
фигуры 7А и 7В, соответственно, показывают боковые схематические виды впускного и выпускного регуляторов типа жалюзей в канале шахты, и представлено действие воздушной волны и вентиляционных воздушных потоков;
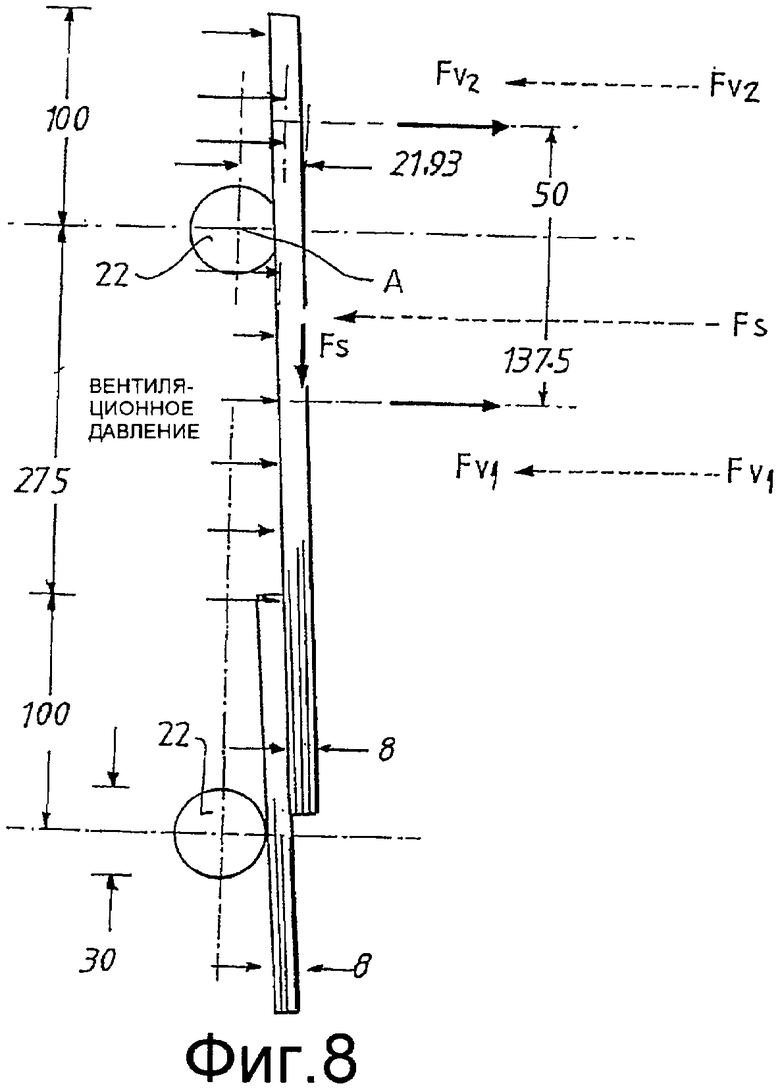
фигура 8 представляет боковой схематический вид двух пластин выпускного регулятора типа жалюзей в закрытой конфигурации и воздействующие на него воздушную волну и вентиляционные силы;
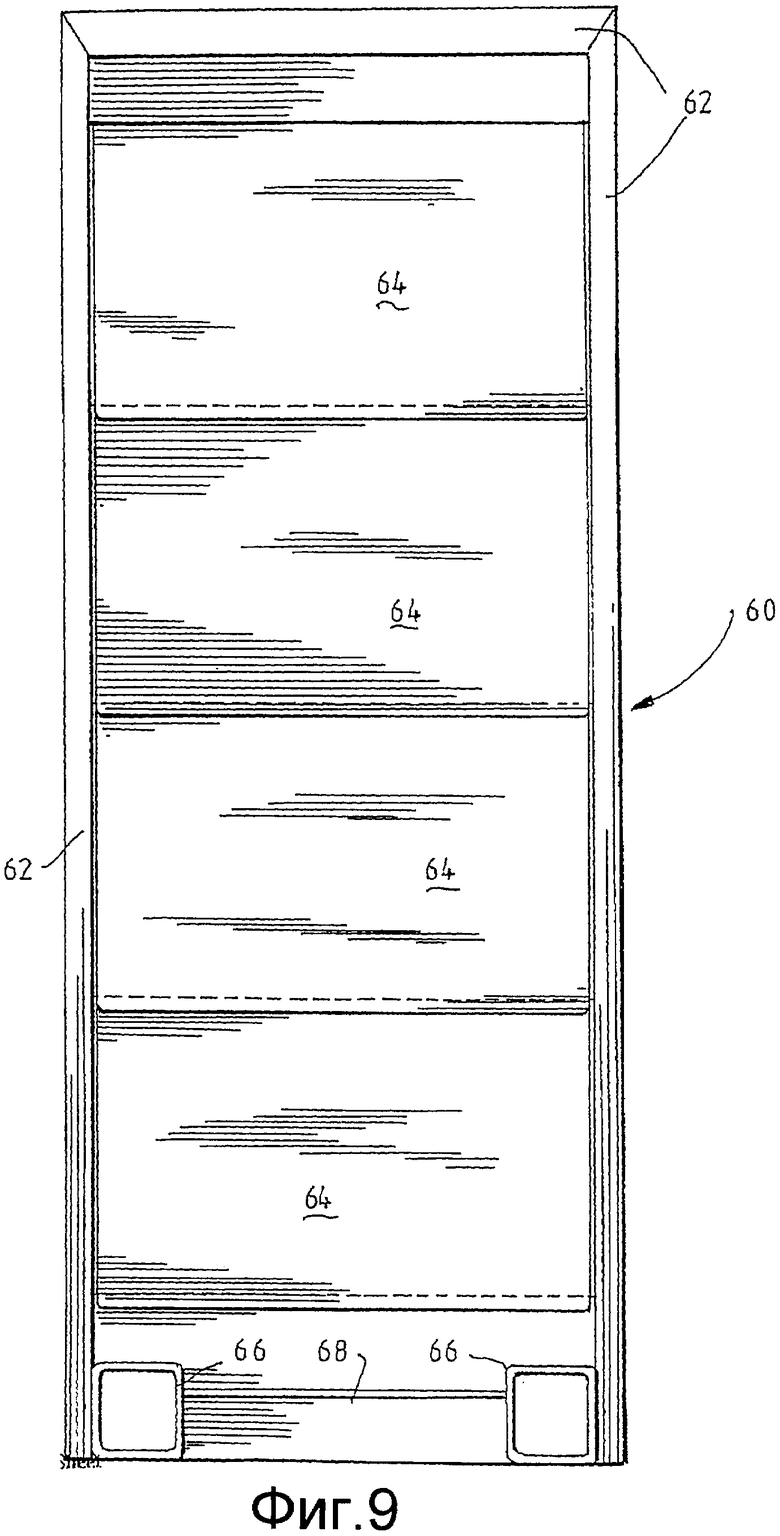
фигура 9 представляет передний вид в перспективе модуля регулятора типа жалюзей;
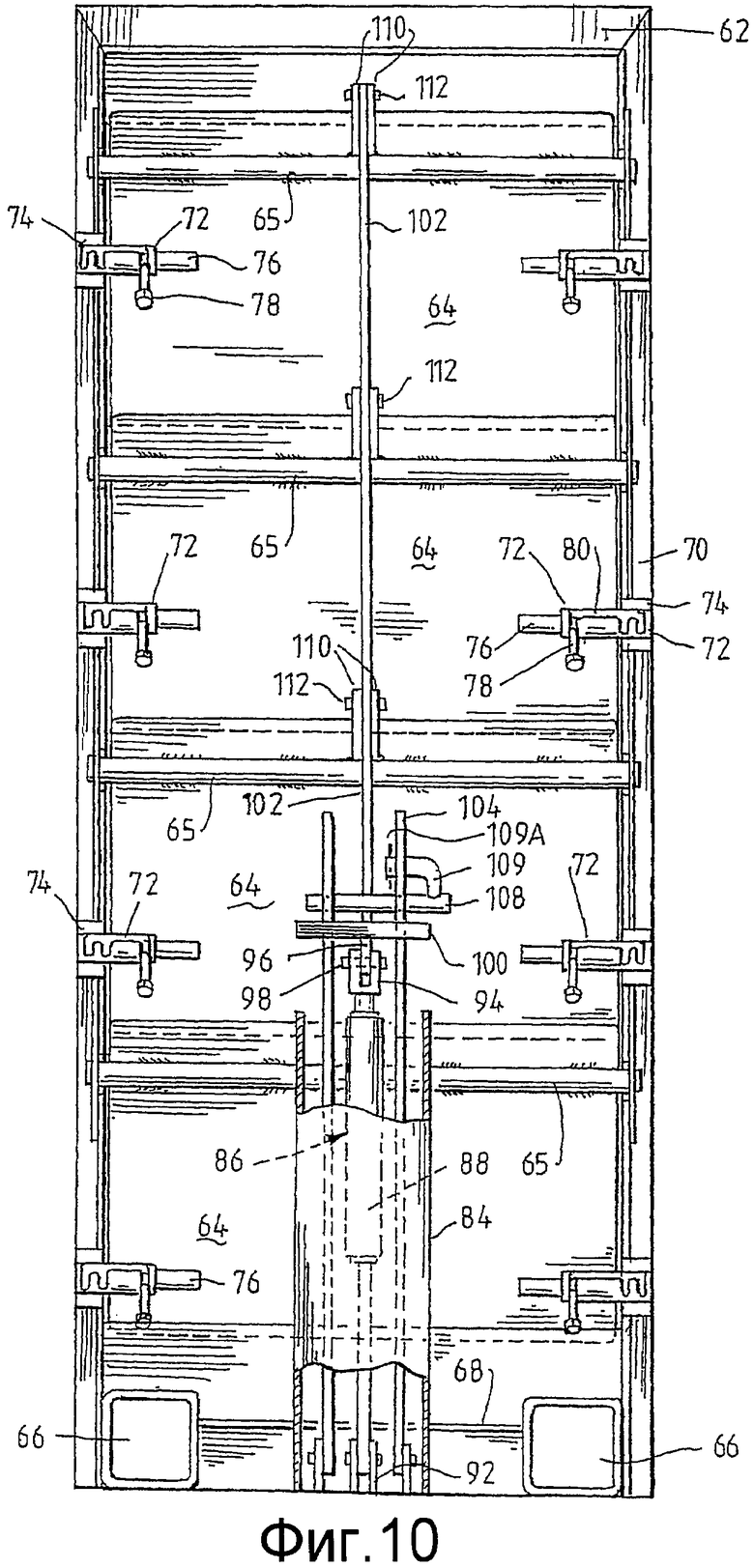
фигура 10 представляет задний вид в перспективе модуля согласно фигуре 9;
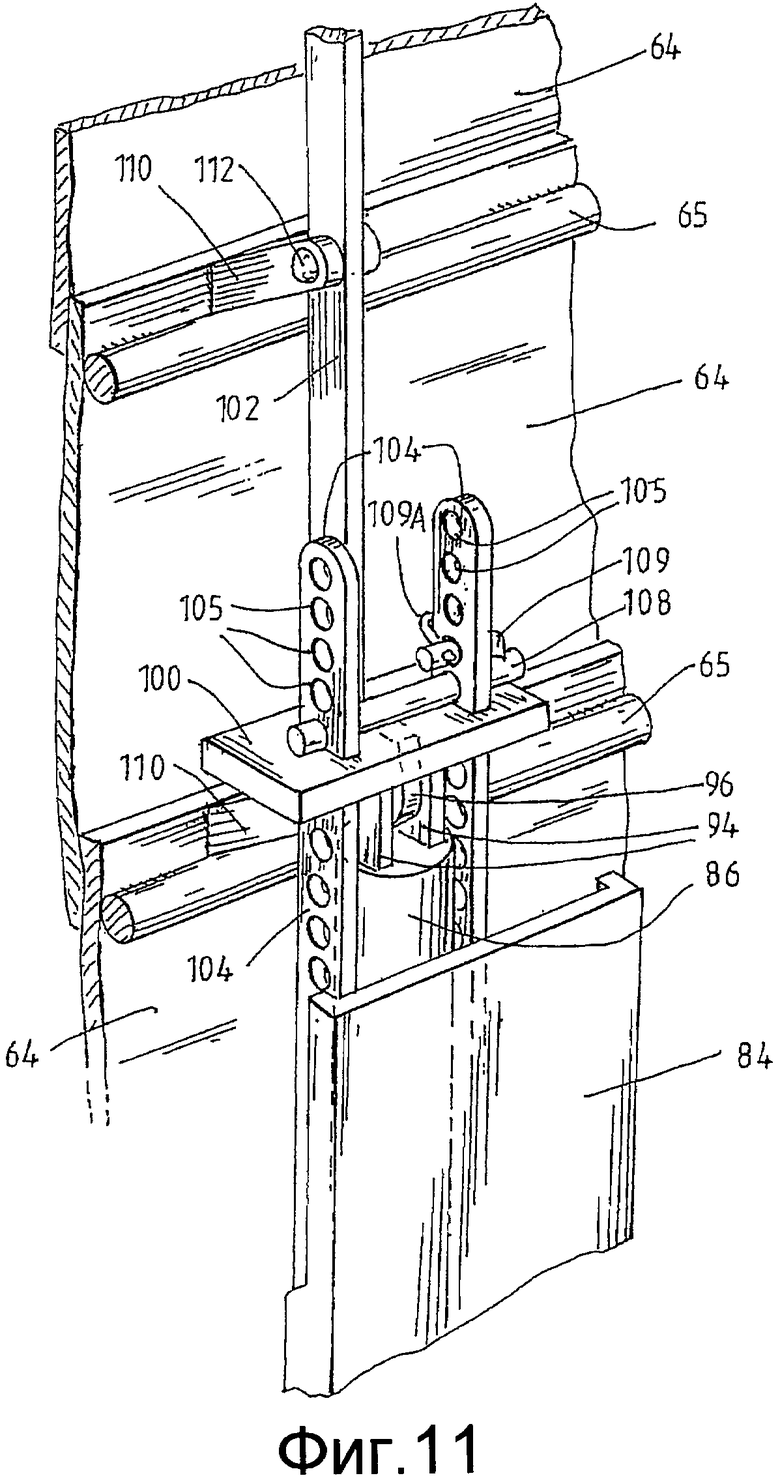
фигура 11 представляет показанный в перспективе фрагмент модуля согласно фигуре 9;
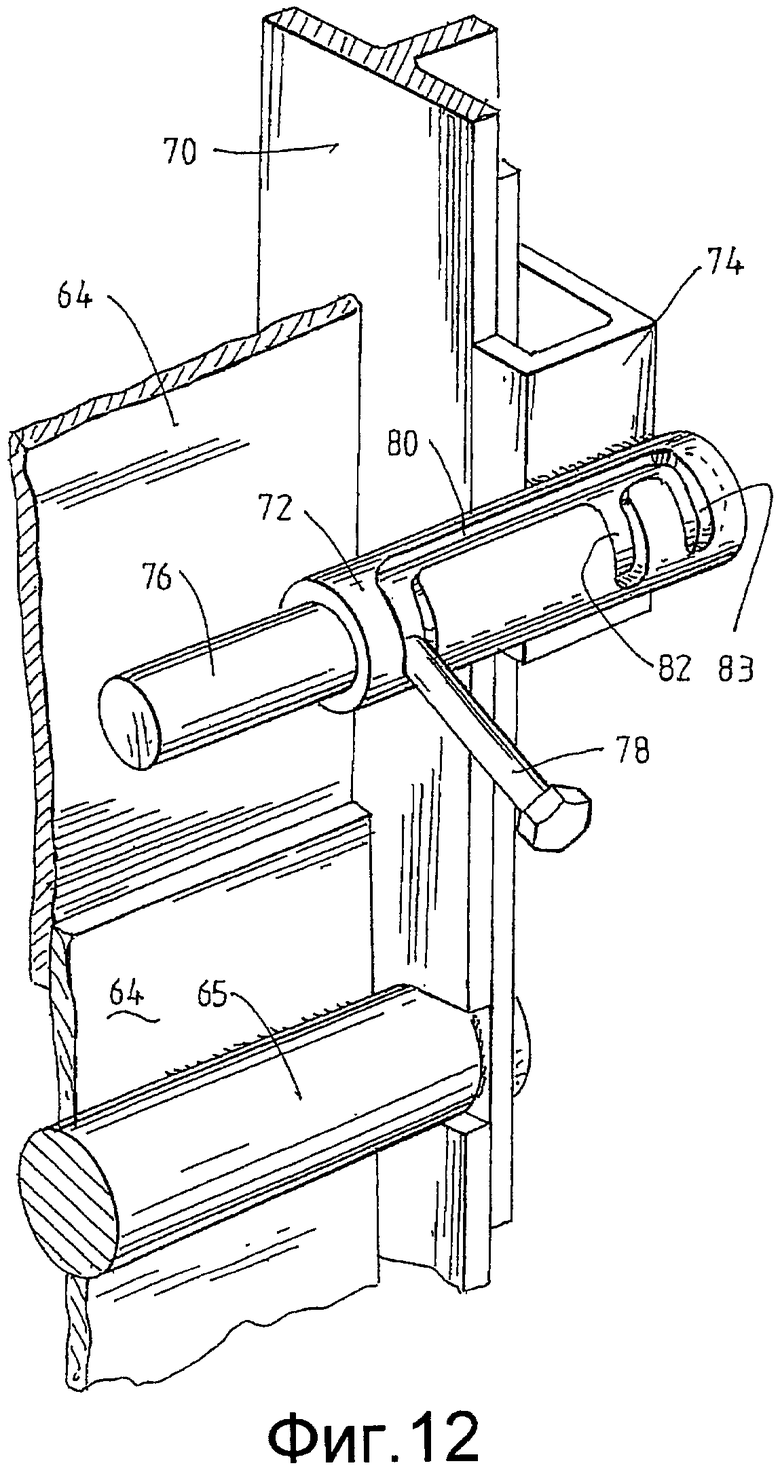
фигура 12 представляет показанный в перспективе фрагмент фигуры 10;
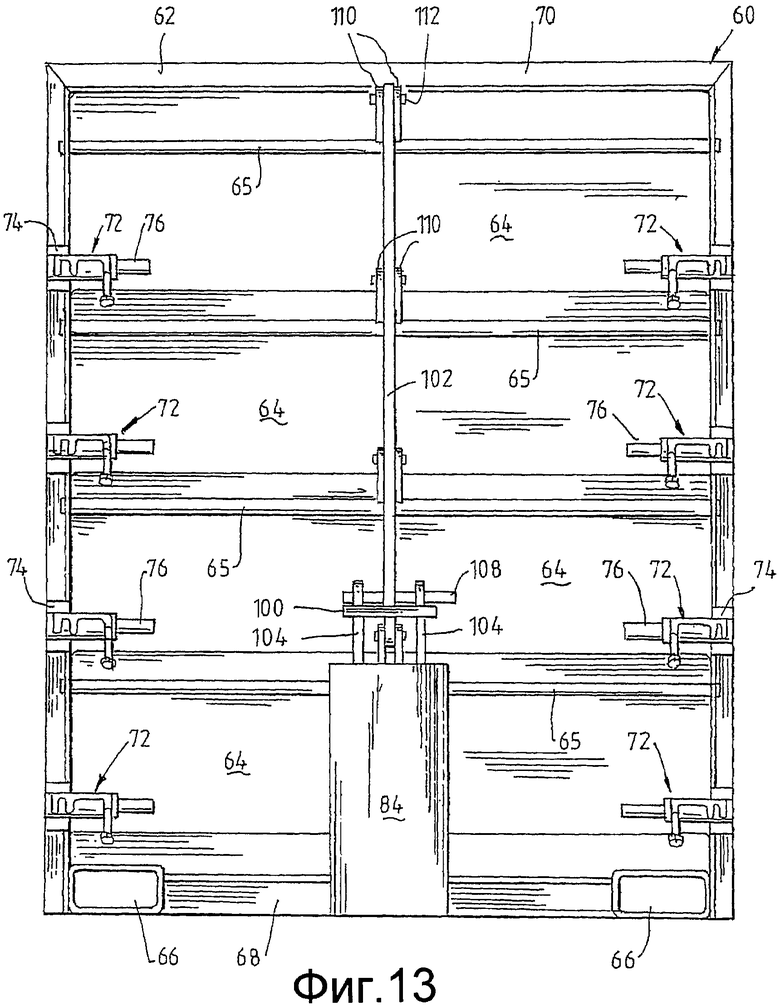
фигура 13 представляет вид сзади другого модуля регулятора типа жалюзей;
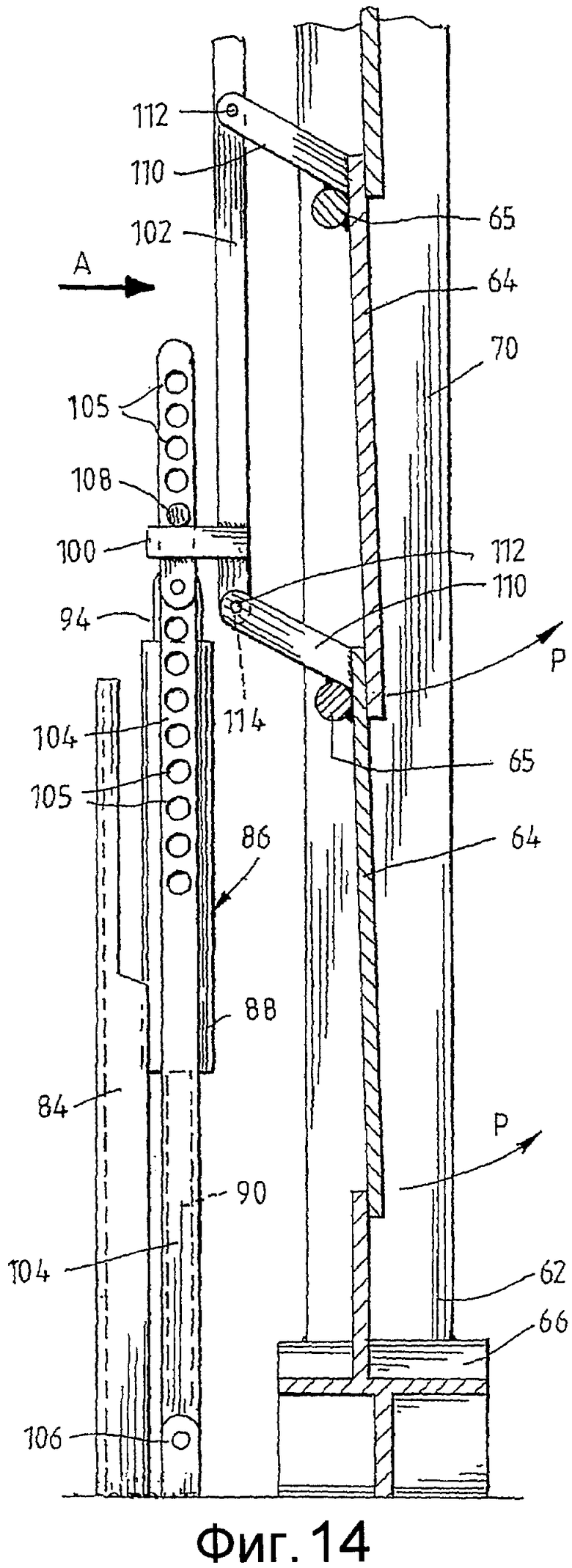
фигура 14 представляет боковой фрагмент наклонного механизма для модуля согласно фигуре 13;
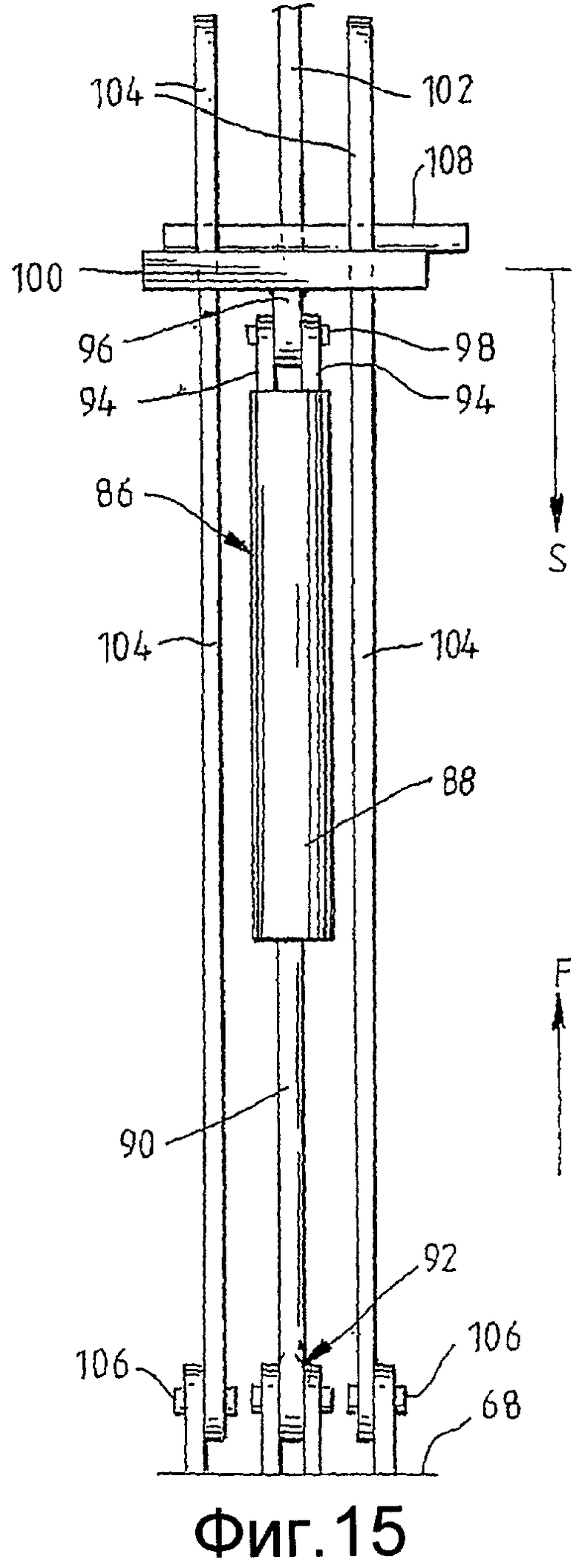
фигура 15 представляет передний фрагмент наклонного механизма для модуля согласно фигуре 13;
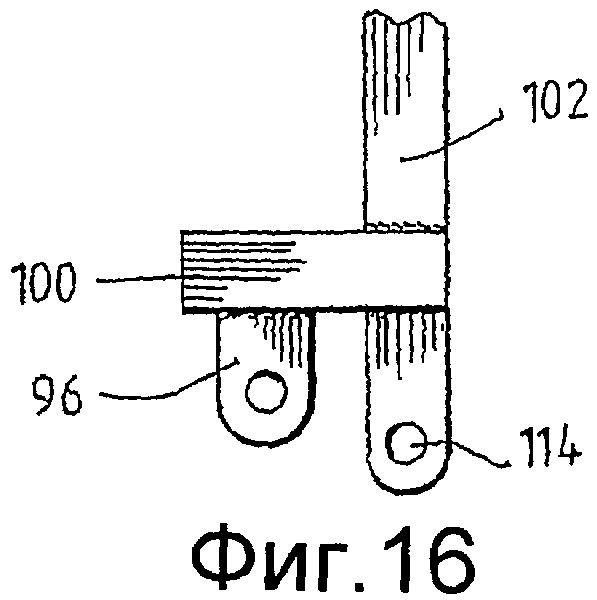
фигура 16 представляет боковой фрагмент наклонного механизма согласно фигуре 15;
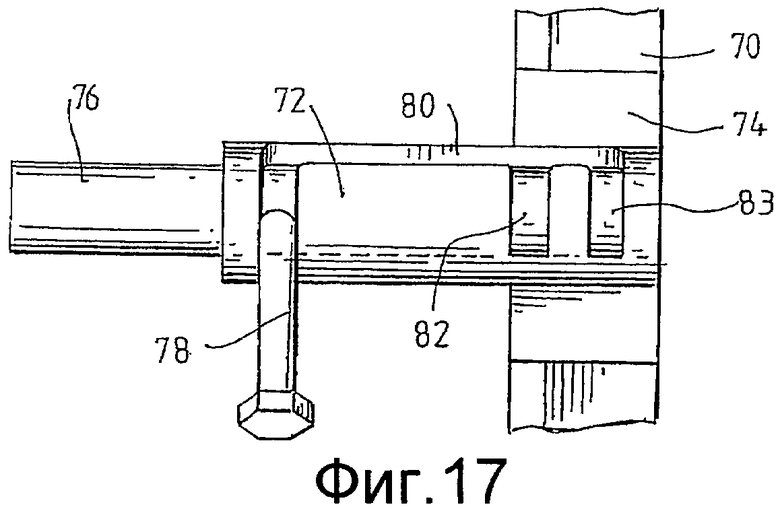
фигура 17 представляет передний фрагмент крепежного механизма для модуля согласно фигуре 13;
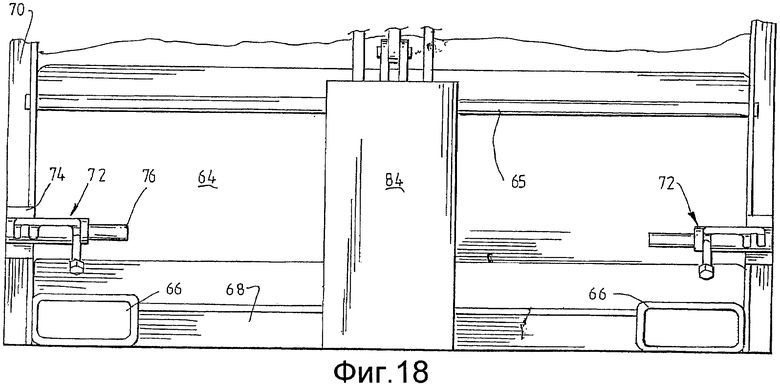
фигура 18 представляет передний фрагмент крепежного механизма и подъемного элемента для модуля согласно фигуре 13.
ПОДРОБНОЕ ОПИСАНИЕ КОНКРЕТНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Регуляторы с опускаемыми досками используют для управления воздушным потоком к подземным шахтам и обычно их располагают внутри (или на входе/выходе) так называемых шахтных штолен. Эти штольни обычно расположены с каждой стороны рудного тела и представляют собой ряд штолен для впуска (входа) воздуха и ряд штолен для возврата (выпуска) воздуха. При взрывных работах или создании воздушной волны вблизи от известных регуляторов с опускаемыми досками они могут быть повреждены и становятся неэффективными, если доски не удалены.
В настоящее время разработаны регуляторы на основе жалюзей, позволяющие устранить недостатки регуляторов с опускаемыми досками, включающие большой вес опускаемых досок и значительные затраты труда и времени для перемещения досок. Указанные регуляторы на основе жалюзей обеспечивают возможность управления воздушным потоком в каналах шахты, а также возможность приспосабливания к избыточному давлению воздуха (например, в результате близкого проведения взрывных работ или воздушной волны в очистном забое) и возврата после этого пластин жалюзей. Таким образом, нет необходимости в демонтаже регулятора перед выполнением в очистном забое взрывных работ или созданием воздушной волны. Кроме того, регуляторами типа жалюзей можно управлять дистанционно (например, из диспетчерской, находящейся на поверхности шахты) для регулирования нормальных уровней воздушного потока в каналах шахты.
Для переоснащения по месту нахождения рам, служащих для регуляторов с опускаемыми досками, были предложены модули на основе жалюзей (пример 2) в качестве средства уменьшения материальных затрат и времени на монтаж.
Была предложена первая функционально законченная конструкция (пример 3) жалюзей, которая включает в себя управляемые вручную механизмы регулирования пластин жалюзей. Было замечено, что вследствие характера механизмов ручного управления в некоторых случаях применения в шахтах эта конструкция могла быть подвергнута опасности при значительных и/или близко проводимых взрывных работах в очистном забое, что приводило к разрывному избыточному давлению воздуха, вызывая остаточное повреждение постоянных жалюзей. Например, если пластина жалюзей застопорена в установленном положении (например, в частично или полностью открытом положении), она может получить повреждение вследствие турбулентного, не ламинарного характера воздушного потока, который может проходить за нее в результате проведения в очистном забое взрывных работ и создания воздушной волны (то есть вследствие силового воздействия на пластину жалюзей против ее застопоривания).
Была предложена вторая функционально законченная конструкция жалюзей (пример 4), которая включает в себя саморегулируемые пластины жалюзей без ручного управления и может быть применена в шахтах и обладает стойкостью к значительным и/или близко выполняемым взрывным работам в очистном забое. При этом саморегулируемые пластины жалюзей могут поворачиваться в ответ на турбулентный, не ламинарный воздушный поток, который проходит за них, и ими можно было управлять независимым образом в течение обычных ситуаций прохождения воздушного потока (то есть удерживать в ряде устанавливаемых положений).
На фигурах 1-4 схематически показан регулятор 10 типа жалюзей, предназначенный для установки у шахтного канала или внутри него (например, в штольнях для впуска и выпуска воздуха). Регулятор 10 содержит множество разных по размеру пластин 12, 14 и 16 жалюзей. Хотя в регуляторе могут быть применены пластины жалюзей, проходящие по вертикали, обычно в эксплуатационных условиях пластины 12, 14 и 16, в общем, проходят по горизонтали.
Регулятор 10 согласно фигуре 1 содержит два модуля в виде жалюзей, имеющих восемь меньших пластин 12, два модуля, имеющих семь средних пластин 14, и два модуля, содержащих четыре больших пластины 16. Кроме того, в одном из нижних модулей несколько пластин может быть удалено (или переразмерено) для возможности установки в них двери, обеспечивающей доступ.
Каждая пластина жалюзей приспособлена для того, чтобы у противоположных концов она могла быть установлена с возможностью поворота в соответствующей раме 20 (фигура 2) для образования модуля. При этом каждая пластина жалюзей может поворачиваться вокруг продольной оси между закрытым или частично открытым положением, в котором пластины жалюзей будут объединены для перекрытия или ограничения потока газа, по меньшей мере, через часть канала, и открытым положением, в котором газ (обычно воздух) может легко проходить между пластинами жалюзей и по каналу.
Одинаковый модуль типа жалюзей может быть применен как во впускных, так и в выпускных штольнях, хотя впускные модули могут потребовать значительно меньшего наклона, чем выпускные модули (что описано ниже).
Как показано на фигурах 3 и 8, ось А может быть смещена по отношению к продольной центральной оси каждой пластины жалюзей. Фактически ось может находиться в стержне 22, прикрепленном к передней части пластины жалюзей и вблизи от ее нижнего при использовании края (фигура 3) или к задней части пластины жалюзей и вблизи от ее верхнего при использовании края (фигура 8).
В случае компоновки согласно фигуре 3 пластины жалюзей не накладываются друг на друга в закрытом положении, в то время как в случае компоновки согласно фигурам 7 и 8 в закрытом положении пластины наложены друг на друга (то есть нижний край и задняя сторона верхней пластины жалюзей наложены поверх верхнего края и передней стороны нижней пластины жалюзей).
Компоновка с наложением особенно удобна для впускных жалюзей, поскольку она приводит к принудительному уплотнению вследствие давления на передние стороны пластин жалюзей вентиляционного воздуха в канале (фигура 7А). Компоновка без наложения (фигура 3) может быть использована для выпускных жалюзей. Однако, как указано выше, и исходя из целесообразности, обычно используют одинаковые модули в местах нахождения как впускного, так и выпускного регулятора типа жалюзей.
Как показано на фигуре 1, рамы 20 модулей могут быть установлены в большей раме 30, расположенной в шахтном канале поперечно ему. От рамы 30 проходит ряд крепежных пальцев или анкерных болтов 32, и каждый из них приспособлен для крепления к смежным стенкам (обычно в них) шахтного канала. При этом пальцы или болты крепят к стене, после чего к пальцам или болтам крепят опалубку. Затем на опалубку напыляют цементирующее связующее 34 (например, торкретбетон, содержащий армирующие стальные волокна) для охвата им пальцев или болтов.
Обычно раму 30 также скрепляют спереди (не показано) посредством связей/распорок. Например, рама может иметь прочные распорки на уровне пола в виде двух горизонтальных распорок у соединений модулей. Два раскоса могут проходить вверх под 45° от уровня пола к средней точке рамы, чтобы придать стойкость на изгиб по вертикали. Обе группы раскосов могут быть подсоединены и прикреплены болтами к полу и обе группы могут иметь прикрепляемые посредством пальца соединения у рамы модуля. Раскосы могут поглощать большое количество ударов, действующих на раму в течение проведения взрывных работ/возникновения воздушной волны.
Как вариант, рамы 20 модулей могут быть установлены в уже существующей раме 40 для опускаемых досок (фигуры 5 и 6), которая уже может быть расположена в канале поперек него.
В регуляторе согласно изобретению использован наклонный механизм для воздействия на каждую пластину жалюзей. При эксплуатации каждую пластину удерживают в заданном положении посредством наклонного механизма, пока не начнутся взрывные работы в очистном забое, возникнет воздушная волна и т.д., что вызывает предварительно определяемый воздушный поток, воздействующий на пластины (например, соответствующий заданному давлению воздуха или избыточному давлению).
На фигуре 3 показано, что один такой наклонный механизм содержит весовое устройство, способное воздействовать на каждую пластину жалюзей и стремится вызвать ее поворот в заданное (закрытое) положение (фигура 3А). Весовое устройство содержит весовой стержень 50, связанный с каждой пластиной жалюзей через соответствующие рычажные плечи 52, проходящие от соответствующих соединительных шарниров 54. Соединительный шарнир 54 подсоединен к концу каждой пластины жалюзей, и когда он поворачивается посредством рычажной передачи, соответствующая пластина будет поворачиваться вокруг оси А. При этом соединительный шарнир 54 может быть подсоединен к концу каждой пластины жалюзей в том же самом месте, что и поворотная опора пластины у стержня 22 (то есть может быть сцентрированным на оси А).
На фигуре 4 весовой стержень 50 представлен более подробно. Фактически стержень может содержать обращенные друг к другу обратными сторонами U-образные каналы 56, прикрепленные друг к другу с каждой стороны рычажных плеч 52. Регулировочный балласт 58 может быть установлен в пределах каждого или обоих U-образных каналов 56, при этом величину балласта регулируют в ответ на поток/давление воздуха, которым пластины жалюзей будут подвергнуты при их эксплуатации (например, перепадам давления, вызванным воздушной волной, перепадам вентиляционного давления у впускных и выпускных жалюзей и т.д.).
В любом случае под влиянием силы тяжести весовой стержень 50 смещается вниз на рычажных плечах 52 для поворота и удерживания каждой пластины жалюзей в заданном (закрытом) положении (фигура 3А). Как только заданные поток/давление воздуха будут достигнуты (непосредственно с левой стороны от пластин жалюзей согласно фигуре 3), пластины будут смещены воздухом для поворота к открытому положению и теперь действуют на каждое рычажное плечо 52 противоположно весу весового стержня 50 (фигура 3В). Когда заданные поток/давление воздуха падают, вес стержня 50 вновь смещается вниз на рычажных плечах 52 для поворота и возврата каждой пластины жалюзей в заданное положение.
Заданное положение также может соответствовать частично открытому положению пластины, и в этом случае стержень 50 через рычажные плечи 52 может поворачивать и возвращать каждую пластину жалюзей в ее положение, причем это положение, в свою очередь, может быть определено одним или несколькими соответствующим образом расположенными стопорами, действующими на стержень, рычажное плечо (плечи) и/или пластину (пластины).
Весовое устройство также может содержать два или более отстоящих друг от друга весовых стержня, и когда имеются два весовых стержня, они могут быть расположены с каждой стороны модуля жалюзей.
В качестве первой альтернативы к весовому устройству (или в качестве дополнения к весовому устройству) может быть использован пружинный механизм, который принудительно смещает каждую пластину жалюзей для поворота в заданное положение. Пружинный механизм может содержать одну, несколько, либо соответствующую пружину для каждой пластины. Пружина (пружины) тянет каждую пластину жалюзей в заданное положение, однако при заданном потоке воздуха пластины жалюзей действуют на пружину (пружины) и растягивают ее, когда каждая пластина жалюзей перемещается к открытому положению.
Пружина (пружины) может действовать между рамой и рычажными плечами или весовым стержнем, либо соответствующая пружина может действовать на каждую пластину жалюзей для ее смещения в заданное положение. Например, каждая пружина может проходить между рамой и точкой крепления, расположенной на пластине жалюзей у переднего или заднего края пластины, либо рядом с ним.
Каждая пружина может представлять собой спиральную пружину (например, из стали), листовую пружину и т.д. Растяжение каждой пружины также может быть отрегулировано.
При заданном потоке/давлении воздуха пластины жалюзей действуют на пружину (пружины) и растягивают ее, когда каждая пластина поворачивается в открытое положение, при этом пружина (пружины) возвращает каждую пластину в заданное положение, когда поток/давление воздуха уменьшается.
На фигурах 9-17 использованы подобные позиции для обозначения одинаковых деталей и показан модуль 60 жалюзей, содержащий раму 62, которая может быть закреплена в большей раме (например, в большей раме 30), при этом большую раму обычно предварительно устанавливают в шахтном канале поперек него.
Модуль 60 содержит четыре большие пластины 64 жалюзей, каждая из которых имеет опорный вал 65, прикрепленный (например, приваренный) к ее задней части, а противоположные концы вала 65 шарнирно прикреплены в соответствующих частях рамы 62 (фигуры 12 и 13). Каждая пластина жалюзей может поворачиваться вокруг продольной оси, проходящей через вал 65, между закрытым или частично закрытым (частично открытым) положением, в котором пластины жалюзей объединены для перекрытия или ограничения потока газа через модуль, и открытым положением, в котором газ легко может проходить между пластинами жалюзей.
Рама 62 дополнительно включает в себя две подъемные втулки 66 в ее базовом элементе 68, предназначенные для захождения зубцов. В каждую из подъемных втулок 66 может заходить соответствующий зубец вильчатого погрузчика для возможности подъема модуля и его переноса к большей раме или от нее.
Как показано на фигурах 10, 12 и 17, каждый из боковых элементов 70 рамы 62 имеет четыре отстоящие друг от друга гильзы 72 под крепежные пальцы, прикрепленные к ним посредством стальных кронштейнов 74 из уголка. Каждая гильза вмещает в себя соответствующий крепежный палец 76, предназначенный для скольжения в ней. К пальцу 76 прикреплен расцепляющий болт 78, который выступает от пальца в поперечном направлении для перемещения в канавке 80, образованной в гильзе 72. Канавка 80 заканчивается у двух стопорных прорезей 82 и 83 для приспосабливания к каким-либо изменениям большей рамы, когда в нее устанавливают модуль.
Каждый крепежный палец имеет возможность скольжения для прохождения за периферию рамы 62 и может быть застопорен в этом продленном положении посредством перемещения болта 78 в одну из двух стопорных прорезей 82 и 83. Таким образом, когда модуль расположен в большей раме (например, посредством вильчатого погрузчика), продолжение пальцев обеспечивает крепление модуля к большей раме. Впоследствии отведение крепежных пальцев обеспечивает возможность отделения модуля от большей рамы. Этим создано быстрое и прочное средство для монтажа и демонтажа каждого модуля.
Согласно фигурам 10, 11, 13, 14, 18 наклонный механизм для воздействия на каждую пластину жалюзей обеспечен позади защитной крышечной пластиной 84, подсоединенной таким образом, что она проходит вверх от базового элемента 68 рамы. При эксплуатации каждую пластину удерживают в заданном (например, закрытом) положении посредством наклонного механизма, пока в очистном забое не начнут проводить взрывные работы, не возникнет воздушная волна и т.д., что приводит к воздействию заданного воздушного потока А (фигура 14) на пластины (при этом воздушный поток соответствует заданному давлению (избыточному давлению) воздуха).
На фигурах 14 и 15 видно, что наклонный механизм содержит газовую распорку 86. Распорка 86 имеет корпус 88 со штоком 90, подсоединенным к базовому элементу 68 рамы у пальцевого монтажного устройства 92. Корпус 88 перемещают посредством давления газа в распорке вверх вдоль штока 90 для смещения его по отношению к раме 62 (в направлении стрелки F на фигуре 15). Это перемещение обеспечивает тенденцию наклонного механизма к самозакрыванию.
При этом, как наилучшим образом показано на фигурах 15 и 16, верхний конец корпуса 88 имеет проходящие вверх ушки 94, прикрепленные к нему, и каждое ушко имеет сквозное отверстие. Между ушками 94 размещено проходящее вниз ушко 96, также имеющее сквозное отверстие. Ушки 94 соединены с ушком 96 посредством стопорного пальца 98. Ушко 96 проходит вниз от плиты 100, которая, в свою очередь, соединена с рычажным стержнем 102 для регулирования пластин жалюзей (как описано ниже).
Для управления величиной закрывания пластин жалюзей создан регулировочный механизм. Этот механизм содержит противоположные, отстоящие друг от друга направляющие штоки 104, каждый из которых имеет множество отверстий 105, проходящих сквозь него.
Каждый шток 104 также соединен с базовым элементом 68 рамы у соответствующего пальцевого монтажного устройства 106 и проходит вверх от него и через отверстия в плите 100. Таким образом, штоки могут содействовать перемещению направляющей плиты вверх и вниз. Регулировочный палец 108 вставлен через выбранное одно из отверстий 105 каждого штока 104 для его прохождения между штоками, что наилучшим образом показано на фигуре 15. Палец 108 расположен над плитой 100 и, следовательно, ограничивает ее перемещение вверх, когда такое перемещение происходит вследствие толкающего воздействия газовой распорки вверх на плиту. Поскольку плита соединена с рычажным стержнем 102 для регулирования пластин жалюзей, степенью закрытия пластин жалюзей можно управлять посредством соответствующего расположения регулировочного пальца 108.
На фигурах 10 и 11 представлен вариант выполнения регулировочного пальца 108. От пальца отходит колено 109, которое может проходить через последующее вышележащее отверстие 105. Удерживающая скоба 109А может крепить конец колена в определенном положении для крепления пальца 108 в надлежащем месте.
В этом случае рычажный стержень 102 шарнирно соединен с устройством 110 в виде двойного кронштейна (что наилучшим образом показано на фигуре 13). Каждый из двойных кронштейнов в устройстве 110 с одного конца жестко закреплен (например, посредством сварки), прилегая к верхнему краю соответствующей пластины 64 жалюзей. Противоположный конец каждого из двойных кронштейнов имеет возможность поворота вокруг пальца 112, проходящего через отверстие (например, 114) у рычажного стержня 102.
Таким образом, когда каждая из пластин жалюзей открыта, по меньшей мере, на части пути (например, из-за увеличения давления воздуха в канале), для самозакрывания пластин газовая распорка действует так, чтобы переместить корпус 88 распорки вверх. Это приводит к смещению вверх плиты 100, которая одновременно смещает вверх рычажный стержень 102, вызывая поворот вверх устройства 110 с двойными кронштейнами (то есть вокруг продольной оси вала 65 пластины жалюзей). При этом обеспечивается перемещение каждой пластины 64 жалюзей назад к заданному (например, закрытому) положению, после чего газовая распорка стремится удержать каждую пластину жалюзей в этом положении. Однако палец 108 может быть применен в разных местах вдоль штоков 104, так что плита 100 входит в зацепление с пальцем, тем самым прекращая перемещение пластины жалюзей к полностью закрытому положению (такое стопорное сопротивление представлено на фигуре 15 стрелкой S). Следовательно, палец 108 может быть использован для удерживания пластин жалюзей в частично закрытом (частично открытом) положении. Например, палец 108 может быть применен тогда, когда желательно или необходимо обеспечить некоторый или нормальный/естественный уровень потока, например, воздуха в канале, в котором применен модуль 60.
Стрелка А на фигуре 14 изображает заданные и достигаемые поток/давление воздуха, при этом пластины 64 будут смещены воздушным потоком для поворота (в направлении стрелки Р на фигуре 14) к открытому положению. Это вызывает перемещение рычажного стержня 102 (посредством устройства 110 с двойными кронштейнами и плиты 100) противоположно силе F газовой распорки, обеспечивая приведение корпуса 88 распорки в движение вдоль штока 90 в нижнем направлении. Когда заданные поток/давление воздуха падают, газовая распорка вновь толкает плиту 100 и, следовательно, рычажный стержень 102 вверх для поворота и возврата каждой пластины жалюзей в заданное положение (частично или полностью закрытое).
Поскольку газовые распорки могут быть взаимозаменяемыми, могут быть выбраны разные силы самозакрывания на основе заданных технических характеристик распорки. Сама распорка также может быть регулируемой, так что она может лишь сжиматься, как только будет достигнуто определенное давление воздуха (например, при выполнении взрывных работ или воздушной волне в очистном забое).
Обычно регулятор содержит механизм управления для отдельного и независимого управления положением каждой пластины жалюзей в течение обычного управления воздушным потоком в шахтном канале (например, для управления течением потока воздуха, не создаваемого взрывом). При этом наклонный механизм не создает помех механизму управления в течение такого обычного управления потоком воздуха. Механизм управления не создает помех открыванию пластин жалюзей при заданном потоке воздуха или возврату пластин наклонным механизмом в заданное положение. Другими словами, эти механизмы действуют независимо друг от друга.
Управляющий механизм можно регулировать вручную, либо он содержит регулировочный механизм с дистанционным управлением. В регулировочном механизме с дистанционным управлением используют исполнительные устройства, приводимые в действие электрически и управляемые дистанционно по волоконно-оптической коммуникационной системе, расположенной на поверхности шахты, для регулирования пластин с целью их установки в заданное положение. Исполнительные устройства могут действовать совместно с измерителями воздушного потока, расположенными в каждом месте нахождения регулятора, при этом оператор обычно осуществляет дистанционное регулирование пластин для получения желаемого воздушного потока при обычных рабочих условиях в шахте.
Механизм ручного регулирования может обеспечить регулирование множества положений пластин, при этом пластины жалюзей могут быть удержаны в ряде различных положений, используя стопорный палец (пальцы). Однако такое регулирование должно быть выполнено по месту оператором.
Регулятор обычно содержит стопор в форме демпфера или амортизатора для предотвращения/ограничения поворотного движения пластин за открытое положение (обычно полностью открытое положение пластин). Демпфер или амортизатор может быть обеспечен для каждой пластины, или, кроме того, могут быть установлены один или несколько демпферов, либо амортизаторов для воздействия на весовой стержень или на рычажные плечи. Каждый демпфер или амортизатор может гасить перемещение одной или нескольких быстро поворачивающихся пластин под влиянием воздушной волны.
ПРИМЕРЫ
Далее будут описаны не ограничивающие изобретение выполнения регуляторов на основе жалюзей.
ПРИМЕР 1 - НОВАЯ КОНСТРУКЦИЯ ЖАЛЮЗЕЙ
В конструкции нового регулятора типа жалюзей, показанной на фигуре 1, вначале в стену шахты были установлены анкерные болты. Затем пальцы, состоящие из стальных секций полого прямоугольного профиля, были нарезаны на отрезки, приварены к анкерному болту и после этого были приварены к большей раме регулятора. В каждом месте крепления были использованы два пальца или скобы, причем один непосредственно по линии с рамой и один, проходящий к ней под 45 градусов для обеспечения эффекта, подобного ферме.
К пальцам/болтам затем была прикреплена опалубка, и происходил процесс торкретирования (обычно процесс напыления бетона во влажном состоянии, при этом бетон содержит стальные армирующие волокна). Стандартная рама, чтобы она отвечала конструктивным требованиям, обычно требует 5 кубических метров бетона.
Заявителем замечено, что время для изготовления регулятора типа жалюзей согласно фигуре 1 во многих шахтах может занимать до трех рабочих смен по 12 часов (значительный расход времени на простой), при этом затраты на создание регулятора с новым окружением из торкретбетона также будут значительными. Таким образом, для многих шахт (особенно для существующих шахт) было бы легче просто установить отдельные модули в каждый имеющийся по месту регулятор.
ПРИМЕР 2 - МОДЕРНИЗАЦИОННАЯ УСТАНОВКА ЖАЛЮЗЕЙ ПРИМЕНИТЕЛЬНО К РАМАМ, ПРЕДНАЗНАЧЕННЫМ ДЛЯ ОПУСКАЕМЫХ ДОСОК
Вместо замены существующей конструкции из опускаемых досок были сконструированы модули типа жалюзей, которые могли быть установлены, например, в известную раму регулятора с опускаемыми досками, имеющую шесть перегородок.
На фигурах 5 и 6 схематически изображена часть стальной рамы 40 регулятора с опускаемыми досками, к которой могут быть прикреплены модули типа жалюзей. Известные рамы сконструированы из профиля 150 UC30 и содержат три вертикальные перегородки 60, каждая из которых была разделена на верхнюю и нижнюю половину посредством горизонтальных перегородок 62. В некоторых из рассмотренных рам регуляторов с опускаемыми досками перегородки отсутствовали, однако, они были легко приварены в надлежащем месте.
Далее, в каждой раме регулятора с опускаемыми досками удалены плиты из древесины и внутри рамы расположены шесть модулей 20 типа жалюзей. Однако перед расположением этих модулей внутри рамы к боковым сторонам каждого модуля были приварены четыре ушка для прохождения в прорези в рамах регуляторов, после чего модули были опущены для установки внутри существующей рамы. Какие-либо зазоры могли быть закрыты стальной покрывающей плитой.
Пять из рам были полностью обеспечены пластинами, а шестая (правосторонняя нижняя секция) содержала дверь для прохода людей, установленную совместно с несколькими пластинами жалюзей (как вариант, измененными по длине, ширине и т.д.).
Преимущество использования модулей состояло в возможности их быстрого и легкого удаления (например, для ремонта, замены) и в возможности их установки внутри существующей рамы в шахте.
ПРИМЕР 3 - ПЕРВЫЙ ИСПЫТАТЕЛЬНЫЙ РЕГУЛЯТОР ТИПА ЖАЛЮЗЕЙ
В первоначальной конструкции испытательного регулятора типа жалюзей был применен механизм управления обычным воздушным потоком, использующий ручную фиксацию пластин жалюзей в каждом модуле посредством рычажных штоков для жесткого ручного механизма регулирования пластин (в котором, однако, также мог быть применен и моторизованный привод).
Перед проведением в очистном забое взрывных работ пластины были перемещены в полностью открытое положение и застопорены на своем месте. Конструкция испытательных жалюзей была подвергнута воздействию нескольких взрывов, при этом было замечено, что самый ближний взрыв приводил к повреждению пластин и монтажных валов для крепления пластин. При проведении испытаний, когда взрывные работы в очистном забое происходили на том же самом уровне, на котором находились жалюзи, пластины и крепежные валы были повреждены таким образом, что модуль был приведен в нерабочее состояние.
При проведении испытаний также было замечено, что воздушная волна при взрывах в пределах окружающих уровней подвергала пластины жалюзей силам с других направлений (например, возникающих из штолен). Хотя при этом было продемонстрировано минимальное сопротивление потоку под воздействием воздушной волны, вихревое действие турбулентного воздуха подвергало пластины и прикрепленные рычажные передачи избыточному давлению, потенциально приводя к повреждению.
В связи с этим применение регуляторов, содержащих регулирование пластин жалюзей посредством ручного управления, было признано более ограниченным.
ПРИМЕР 4 - ВТОРОЙ ИСПЫТАТЕЛЬНЫЙ РЕГУЛЯТОР ТИПА ЖАЛЮЗЕЙ
Как было обсуждено в примере 3, первоначальная конструкция испытательного регулятора типа жалюзей, включающая в себя ручное регулирование пластин жалюзей, не удовлетворяла всем рабочим условиям внутри шахты и, как было замечено, вероятно, на некоторой стадии вызывает повреждение, что приводит к неработоспособности. Была разработана вторая испытательная конструкция регулятора типа жалюзей, которая была предназначена для доведения до минимума повреждения пластин жалюзей, прикрепленных рычажных передач и рамной конструкции. Эта конструкция была разработана с целью уменьшения начального удара по раме, к которой прикреплены компоненты.
При этом в данной конструкции пластины (и какие-либо рычажные передачи) способны свободно перемещаться в течение взрыва и не поглощали так много энергии, как система с ручной фиксацией пластин. Следовательно, пластины были саморегулируемыми.
В проектном решении и построении указанной конструкции были разработаны следующие конструктивные отличительные признаки.
1. Точка поворота пластин жалюзей была расположена по возможности ближе к переднему краю (край, ближайший к воздушному потоку изнутри смежного очистного забоя), так что в течение взрывных работ в очистном забое повреждение было доведено до минимума. Для пластин, свободно висящих и расположенных близко друг к другу, точка поворота также была расположена близко к переднему краю.
2. Конструкция пластины создавала низкое сопротивление проходящему воздуху, так что потери энергии были доведены до минимума.
3. Пластины жалюзей были саморегулируемыми, так что перед проведением взрывных работ в очистном забое сотрудники, отвечающие за вентиляцию в шахте, не должны были производить какую-либо регулировку жалюзей.
4. Пластины внутри модуля типа жалюзей свободно поворачиваются на своих валах и могут самостоятельно закрываться под давлениями вентиляции в шахте (исключая избыточные давления при взрыве).
5. Пластины были изготовлены достаточно тяжелыми для содействия перемещению в заданное положение (закрытое или частично открытое) противоположно воздействию вентиляционных давлений.
6. Требуемый вес был иной для регуляторов типа жалюзей, расположенных вблизи от впускных каналов, по сравнению с регуляторами, расположенными вблизи от выпускных каналов.
7. Отсутствовало ограничение на пластины в отношении возможности полного открывания (например, к горизонтали) из установленного положения (заданного - закрытого или частично открытого) в течение проведения взрывных работ, и пластины опускались назад (падали) в заданное положение даже после дополнительного открывания посредством взрыва.
8. Предварительно устанавливаемая направляющая (например, стопор) была нежестко прикреплена к рычажной передаче пластины.
9. Рама жалюзей была скреплена спереди, когда при эксплуатации отсутствовал доступ для системы связей сзади (или внутри штольни).
10. При необходимости возможен вариант с наличием одного из эксплуатируемых донных модулей с шарнирным креплением для обеспечения доступа пользователя через регулятор типа жалюзей.
11. Пластины могут быть независимым образом соединены с исполнительным устройством (например, с применением привода от двигателя) для управления нормальным потоком воздуха в штольне.
ПРИМЕР 5 - ВЫПУСКНЫЕ И ВПУСКНЫЕ РЕГУЛЯТОРЫ ТИПА ЖАЛЮЗЕЙ
На фигурах 7А и 7В, соответственно, схематически представлены регуляторы типа жалюзей, подвергаемые впускному и выпускному давлению. Типичное максимальное вентиляционное давление внутри какой-либо штольни, как было отмечено, достигает 2000 Па (при максимальном давлении вентилятора в верхней части штольни, как показано). Происходил сброс этого давления, когда воздух проходил через штольню и/или когда воздушные пути разделялись. Это давление было использовано для конструкции пластин жалюзей.
В случае впускного регулятора типа жалюзей согласно фигуре 7А воздушный поток в очистном забое поднимал пластины жалюзей, тогда как давление вентиляционного воздуха стремилось закрыть пластины.
В выпускных жалюзях согласно фигуре 7В как воздушная волна в очистном забое, так и давление вентиляционного воздуха поднимали пластины в открытое положение. Поэтому вес пластин и при необходимости дополнительное весовое нагружение и/или пружинный наклон были применены для противодействия подъему пластин жалюзей под давлением вентиляционного воздуха и удерживания их в заданном положении. Для дополнительного содействия самозакрыванию пластин была применена конструкция пластин, в которой точка поворота пластины была расположена навстречу ее верхнему краю, и пластина была наклонена таким образом, что компонент веса пластины ограничивал вентиляционный поток воздуха, при этом было тщательно рассмотрено распределение веса пластины.
ПРИМЕР 6 - КОНСТРУКЦИЯ ПЛАСТИНЫ ЖАЛЮЗЕЙ
Были проведены расчеты для определения возможности использования веса пластин жалюзей, оказывающих сопротивление силе вентиляционного воздуха. При расчетах было сделано допущение, что вал пластины смещен к ее верхней части, и пластины расположены рядом друг с другом в наклонной конфигурации (фигура 8).
Расчеты были выполнены для пластины, ширина которой составляла 475 мм и которая была изготовлена из листа толщиной 8 мм и, для простоты, длиной 1 метр. Было сделано допущение, что пластина приварена к валу диаметром 30 мм со смещением 100 мм, задавая при этом перекрытие для каждой пары смежных пластин, составляющее 100 мм. Было предположено, что центры валов пластин отстоят друг от друга на 375 мм. Было предположено, что конструкция отклоняемых пластин должна противостоять вентиляционному давлению порядка 2 кПа без открывания. Были сделаны следующие расчеты:
вес пластины = 0,008×0,475×9800 Н = 360,3 Н.
На фигуре 8 отклоняемые пластины показаны прикрепленными к валу диаметром 30 мм, сцентрированному на оси А. На фигуре 8:
FS - результирующая сила стальной пластины;
Fv1,2 - силы действия на пластину вследствие вентиляционного выпускного воздуха.
Давление воздуха было разложено на эквивалентные силы вокруг линии напора так, как показано.
Fv1 = 0,275×1×2000 = 550 Н (плечо рычага 137,5 мм);
Fv2 = 0,100×1×2000 = 200 Н (плечо рычага 50,0 мм).
Посредством моментов разложения вокруг центра А вала было определено, была ли достаточной сила пластин для закрывания при противодействии вентиляционному давлению.
При этом MA = 365,3 [Н] × 21,93 [мм] + 200 [Н] × 50 [мм] = 18 кН·мм.
Таким образом, вентиляционное давление на пластину ниже вала должно противостоять моменту MA. Момент вследствие вентиляционного давления на часть пластины ниже вала составлял:
= 550 [H] × 137,5 [мм] = 75,625 кН·мм.
Дисбаланс порядка 57,6 кН должен быть преодолен для удерживания пластин в заданном положении. В качестве вероятных решений были рассмотрены следующие возможности:
1. добавление сплошного блока из квадратной стали размером 40 мм к кончику пластины (но это было вычислено для обеспечения только дополнительных 7,845 кН·мм),
2. смещение пластины еще на одни 50 мм от точки поворота А (но это было вычислено для добавления лишь еще одного момента порядка 50×365,3 = 18,27 кН·мм).
Таким образом, как показали расчеты, увеличение веса пластин и/или увеличение поворотного плеча пластин было недостаточно для преодоления вентиляционного давления воздуха. Кроме того, поскольку края пластин уплотнены относительно рамы, величина смещения была соответствующим образом ограничена. Как было замечено, централизация точки поворота А уравновешивала вентиляционное давление на пластину, однако в дальнейшем пластины могли быть подвергнуты повреждению в течение взрывных работ/воздушной волны в очистном забое.
Поэтому было разработано решение, которое в общих чертах описано применительно к фигуре 3, а именно, расположение уравновешивающего груза на каждом модуле со стороны штольни, при этом груз крепят к пластинам посредством соответствующих рычажных плеч. В этом случае было обеспечено удерживание пластин в заданном положении при обычных давлениях вентиляции.
Обычно были использованы стальные грузы. Также был исследован вариант, содержащий придание направления стальному грузу и его перемещение вверх и вниз внутри трубы. Для выполнения вышеупомянутой функции также был указан возвратный пружинный механизм, при этом преимущественно была обеспечена возможность регулирования растяжения.
Было указано, что должны были быть выполнены дополнительные эксперименты для измерения эпюры давления по времени при воздействиях производственных взрывных работ в месте проведения испытаний. Должно было быть составлено программное обеспечение для описания сил, действующих на каждый компонент жалюзей при каком-либо заданном угле пластин или в какое-либо заданное время. Программное обеспечение должно было иметь в качестве входных данных эпюру давления по времени для любого случая создания избыточного давления.
ПРИМЕР 7 - КОНСТРУКТИВНОЕ РЕШЕНИЕ ВЫПУСКНОГО РЕГУЛЯТОРА ТИПА ЖАЛЮЗЕЙ
На фигурах 3А и 3В схематически показаны выпускные жалюзи. Эта конструкция была основана на введении веса, который может противодействовать вентиляционному давлению 1000 Па, воздействующему на пластины размером 300×1200 мм (приблизительный размере модуля жалюзей). Общая масса каждого весового стержня на противоположных сторонах модуля составляла 54 кг (стержень, расположенный с одной стороны жалюзей, мог иметь вес, приблизительно составляющий 108 кг).
При работе выпускных жалюзей было замечено, что когда пластины жалюзей открывались, сопротивление воздушному потоку снижалось (то есть рычажное плечо эффективно укорачивалось), при этом каждую пластину тем легче открыть, чем больше она была открыта. В этом случае наблюдалась тенденция к уменьшению удара от воздушной волны по пластинам и конструкции в целом.
Было бы идеально, чтобы вес соединительного стержня можно было регулировать (например, посредством использования балласта). Кроме того, поскольку имела место тенденция к ускорению пластин при их закрывании, конструкцию регулятора необходимо оценивать на удар по задающему механизму.
ПРИМЕР 8 - ИЗГОТОВЛЕНИЕ ПЛАСТИН, МОДУЛЕЙ И РАМЫ ЖАЛЮЗЕЙ
Каждая пластина жалюзей была сформирована из окрашенной, мягкой низкоуглеродистой стали (сталь марки 350). Окрашивание стальных жалюзей было выполнено после пескоструйной обработки. Рамы были сформированы подобным образом. Для обеспечения эффективной защиты от коррозии была использована двухкомпонентная эпоксидная краска (Joatacoat 605). Было установлено, что такая краска позволяет получить удовлетворительные результаты в подземных шахтах, где известные устройства управления вентиляцией, окрашенные такой краской, не требовали обновления за период порядка шести лет.
Для валов жалюзей была использована нержавеющая сталь 316, а в местах установки пластин были применены втулки из нейлона.
Технические требования к конструкции
Модули жалюзей были сконструированы для управления воздушным потоком с поверхности к штольням, которые обслуживают до шести или семи уровней в пределах каждой части шахты. Каждая пластина, модуль и рама жалюзей характеризовались следующими факторами
сконструирована для противостояния давлению воздушной волны порядка 5 фунтов на квадратный дюйм (34 кПа);
обеспечивала возможность ручного регулирования оператором без какой-либо помощи;
имела размер отверстия, составляющий 4,5 метра по высоте и 3,5 метра по ширине;
имела модульную конструкцию, конфигурация которой могла быть изменена;
позволяла осуществлять торкретирование по месту;
позволяла осуществлять дистанционное управление;
не подвергалась воздействию от перемещения грунта в течение монтажа;
имела стойкость к коррозии (например, к парам минерализованной воды, присутствующим в проходящем вниз воздухе);
позволяла выбрать вариант управления парами модулей, при этом, например, три исполнительных устройства могли полностью открывать или полностью закрывать пластины жалюзей, для обеспечения управления нарастающим воздушным потоком к исполнительным устройствам могли быть добавлены дополнительные управляющие устройства.
Модули жалюзей
Регулятор типа жалюзей обычно содержал шесть съемных модулей одинакового размера, причем каждый с группой горизонтальных пластин, для легкости удаления и замены поврежденных модулей (см. фигуру 1). Для безопасного удаления каждого модуля были обеспечены подъемные ушки.
В варианте с ручным управлением горизонтальные пластины жалюзей могли быть установлены в большое количество положений. В таком случае пластины жалюзей в каждом модуле можно было регулировать, и они могли быть застопорены в следующих положениях: в открытом, в закрытом на 20%, на 40%, на 60%, на 80% и в полностью закрытом положении.
Рама жалюзей также могла быть приварена к имеющимся стальным рамам регулятора с опускаемыми досками, однако каждый такой случай требовал тщательного рассмотрения и измерения для определения возможности совместимости.
Автоматизация жалюзей
Автоматическое (и дистанционное) управление пластинами в каждой раме с пластинами жалюзей было достигнуто посредством использования электрических исполнительных устройств Тусо двойного действия, в которых используют зубчатую рейку и шестерню, при этом шестерню соединяли с пластинами жалюзей посредством соединительных штоков. Эти исполнительные устройства позволяют легко осуществлять дистанционное управление. Исполнительные устройства имеют корпус из анодированного алюминия для защиты от коррозионной окружающей среды. Три исполнительных устройства были установлены на горизонтальной раме, которая отделяла каждую пару модулей жалюзей.
ПРИМЕР 9 - ПРЕИМУЩЕСТВА РЕГУЛЯТОРА НА ОСНОВЕ ЖАЛЮЗЕЙ
В самонастраиваемом регуляторе типа жалюзей обеспечивалось следующее:
сотрудники, занимающиеся обеспечением вентиляции, не должны были настраивать жалюзи до и после проведения взрывных работ в очистном забое;
пластины свободно колебались от воздушной волны в течение проведения взрывных работ в очистном забое;
пластины возвращались в их первоначальные (заданные) положения после проведения взрывных работ в очистном забое;
возвращенные пластины оставались в заданном положении при обычном вентиляционном потоке в шахте и в закрытом положении обеспечивали лучшую характеристику уплотнения, чем известные регуляторы, особенно с перекрытием пластин;
модули пластин могли быть встроены в существующие рамы регуляторов с опускаемыми досками;
были созданы регуляторы, пригодные для использования в коррозионных солевых средах, что требовало минимального обслуживания.
При применении регулировочного механизма с самонастраиваемым регулятором типа жалюзей отсутствует необходимость в его непосредственном креплении к средствам управления пластинами жалюзей, и он мог содержать простой механизм.
Хотя были описаны конкретные варианты осуществления конструкции регулятора типа жалюзей, должно быть понятно, что регулятор может быть выполнен в виде многих других форм.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛУЧШЕННЫЙ РЕГУЛЯТОР ВОЗДУШНОГО ПОТОКА | 2008 |
|
RU2517103C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ И ПРЕДОТВРАЩЕНИЯ ВЗРЫВА ПЫЛЕМЕТАНОВОЗДУШНОЙ СМЕСИ В КОМПЛЕКСНО-МЕХАНИЗИРОВАННОМ ЗАБОЕ | 2010 |
|
RU2459958C1 |
| ВОДЯНОЙ ЗАСЛОН | 1991 |
|
RU2010980C1 |
| Шахтная вентиляционная установка | 1980 |
|
SU875092A2 |
| СПОСОБ ПОДГОТОВКИ ПЛАСТОВЫХ МЕСТОРОЖДЕНИЙ К ПРЯМОМУ ПОРЯДКУ ОТРАБОТКИ ПРИ КАМЕРНО-СТОЛБОВОЙ СИСТЕМЕ РАЗРАБОТКИ | 2010 |
|
RU2435961C1 |
| СИСТЕМА НАСТРОЙКИ ВЕНТИЛЯЦИОННОГО КЛАПАНА | 2016 |
|
RU2698645C2 |
| ТЕХНОЛОГИЧЕСКАЯ СХЕМА ВЫЕМОЧНОГО УЧАСТКА ПОДЗЕМНОЙ БЕЗОПАСНОЙ РАЗРАБОТКИ ВЫСОКОГАЗОНОСНОГО ПЛАСТА | 2018 |
|
RU2735072C2 |
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2009 |
|
RU2398969C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ВОЗДУШНЫХ ПОТОКОВ В ШАХТНЫХ ВЕНТИЛЯЦИОННЫХ СЕТЯХ | 2004 |
|
RU2256076C1 |
Изобретение относится к регулятору воздушного потока. Техническим результатом является защита механизма от избыточного усилия и автоматизация работы. Регулятор содержит множество пластин жалюзей, приспособленных для установки в раме и поворота в ней вокруг продольной оси между заданным положением, в котором пластины жалюзей объединены для закрывания или ограничения части канала, и открытым положением для прохождения воздуха между пластинами жалюзей и через канал, наклонный механизм для воздействия на каждую пластину жалюзей таким образом, что при использовании каждая пластина жалюзей приспособлена удерживаться в заданном положении до достижения заданного потока воздуха к пластинам, при этом наклонный механизм представляет собой распорный механизм, способный действовать на каждую пластину жалюзей для ее поворота в заданное положение, и представляет собой газовую распорку, соединенную с рычажным механизмом, действующим на пластины жалюзей, для их перемещения в заданное положение, при этом при заданном воздушном потоке пластины жалюзей способны действовать на рычажный механизм, который способен действовать на газовую распорку при перемещении каждой пластины жалюзей к открытому положению. 13 з.п. ф-лы, 18 ил.
1. Регулятор воздушного потока типа жалюзей для канала шахты, содержащий множество пластин жалюзей, приспособленных для установки в раме и поворота в ней вокруг продольной оси между заданным положением, в котором пластины жалюзей объединены для закрывания или ограничения части канала, и открытым положением для прохождения воздуха между пластинами жалюзей и через канал, наклонный механизм для воздействия на каждую пластину жалюзей таким образом, что при использовании каждая пластина жалюзей приспособлена удерживаться в заданном положении до достижения заданного потока воздуха к пластинам, при этом наклонный механизм представляет собой распорный механизм, способный действовать на каждую пластину жалюзей для ее поворота в заданное положение и представляющий собой газовую распорку, соединенную с рычажным механизмом, действующим на пластины жалюзей, для их перемещения в заданное положение, при этом при заданном воздушном потоке пластины жалюзей способны действовать на рычажный механизм, который способен действовать на газовую распорку при перемещении каждой пластины жалюзей к открытому положению.
2. Регулятор по п.1, в котором заданное положение пластин соответствует закрытому или частично открытому положению пластин, а открытое положение соответствует полностью открытому положению пластин.
3. Регулятор по п.1 или 2, в котором соединение между газовой распоркой и рычажным механизмом выполнено с возможностью регулирования таким образом, что пластины жалюзей способны полностью или частично закрываться под действием газовой распорки.
4. Регулятор по п.1 или 2, дополнительно содержащий механизм управления для отдельного и независимого управления положением каждой пластины жалюзей в течение нормального воздушного потока в канале шахты, при этом наклонный механизм не мешает управлению нормальным воздушным потоком и механизм управления не мешает открыванию пластин жалюзей при заданном воздушном потоке или возврату пластин наклонным механизмом в заданное положение.
5. Регулятор по п.4, в котором управляющий механизм содержит механизм ручного регулирования или регулировочный механизм с дистанционным управлением.
6. Регулятор по п.5, в котором в регулировочном механизме с дистанционным управлением использованы исполнительные устройства, приводимые в действие электрически и управляемые дистанционно через волоконно-оптическую коммуникационную систему.
7. Регулятор по пп.1, 2, 5, 6, дополнительно содержащий множество монтажных пальцев/болтов, проходящих от рамы и предназначенных для крепления по отношению к смежной стене канала шахты.
8. Регулятор по п.7, в котором пальцы использованы для крепления опалубки, обеспечивающей опору для нанесения цементирующего связующего, при этом пальцы/болты, опалубка и связующее в дальнейшем обеспечивают конструктивную стену для удерживания рамы в канале.
9. Регулятор по п.1, в котором рама формирует часть модуля, множество которых приспособлено устанавливаться в большей раме, расположенной в канале.
10. Регулятор по п.9, в котором каждый модуль имеет множество избирательно удлиняемых крепежных пальцев, расположенных вокруг его периферии таким образом, что при установке модуля в большую раму канала удлинение крепежных пальцев обеспечивает крепление модуля к раме канала, а отведение крепежных пальцев обеспечивает возможность отделения модуля от рамы канала.
11. Регулятор по п.9 или 10, в котором каждый модуль имеет образованные в нем места для подъема, обеспечивающие возможность его подъема для ввода в раму и вывода из нее.
12. Регулятор по одному из пп.1, 2, 5, 6, 8-10, дополнительно содержащий стопор для предотвращения поворотного перемещения пластин за открытое положение.
13. Регулятор по п.12, в котором стопор содержит демпфер или амортизатор.
14. Регулятор по одному из пп.1, 2, 5, 6, 8-10, 13, в котором пластины при их использовании проходят в раме, в общем, по горизонтали.
| ЖАЛЮЗИЙНЫЙ ВЕНТИЛЯЦИОННЫЙ РЕГУЛЯТОР | 0 |
|
SU318711A1 |
| Устройство для регулирования расхода воздуха | 1990 |
|
SU1742594A1 |
| US 3631790 A, 04.01.1972 | |||
| US 3346007 A, 10.10.1967 | |||
| Регулятор расхода воздуха | 1985 |
|
SU1320446A1 |
| Устройство для регулирования расхода воздуха | 1985 |
|
SU1337618A1 |
| US 5277658 A, 11.01.1994. | |||

