Предлагаемые способ и устройство относятся к области поисково-спасательных систем и могут быть использованы для дистанционного поиска и обнаружения заблудившихся и потерявшихся в лесу, терпящих бедствие в морских условиях рыбаков и специалистов, обслуживающих морские терминалы по добыче углеводородов, особенно в условиях плохой видимости, для поиска альпинистов, туристов, грибников, детей, собак и т.п., относящихся к группе риска и снабженных миниатюрным приемопередатчиком, выполненным в виде медальона, брелка, перстня, корточки и т.п.
Известны способы и устройства для обнаружения местонахождения засыпанных биообъектов или их останков [патенты RU №2085997, 2105432, 2116099, 2206902, 2248235, 2288486, 2306159; патенты США №4129868, 4673936; Винокуров В.К. и др. Безопасность в альпинизме. - М., 1983, с.136-137; Дикарев В.И. Безопасность, защита и спасение человека. - СПб., 2007, с.61-73 и другие].
Из известных способов и устройств наиболее близкими к предлагаемым являются «Способ обнаружения местонахождения засыпанных биообъектов или их останков и устройство для его осуществления» [патент RU №2248235], которые и выбраны в качестве прототипов.
Устройство, реализующее известный способ, содержит санирующий блок и приемопередающий блок, размещаемый на объектах, относящихся к группе риска.
Однако известные способ и устройство обладают низкими функциональными возможностями по причине того, что не позволяют точно определить направление на обнаруженный объект и дальность до него, т.е. не обеспечивают точного определения местонахождения обнаруженного объекта.
Технической задачей изобретения является расширение функциональных возможностей способа и устройства для его осуществления путем точного определения направления на обнаруженный объект и дальности до его местонахождения.
Поставленная задача решается тем, что способ обнаружения терпящих бедствие, заключающийся, в соответствии с ближайшим аналогом, в предварительном размещении на объекте, относящемся к группе риска, маломощного приемопередатчика, при этом в качестве приемопередатчика используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, облучают с помощью сканирующего блока участок местности, где может находиться объект, направленным электромагнитным сигналом, принимают его на объекте, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну опять в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, принимают сканирующим блоком, усиливают по амплитуде, осуществляют синхронное детектирование, регистрируют выделенный аналог модулирующего кода, соответствующий структуре встречно-штыревого преобразователя, анализируют его и определяют принадлежность обнаруженного объекта, отличается от ближайшего аналога тем, что направленный электромагнитный сигнал перед облучением манипулируют по фазе псевдослучайной последовательностью, сформированный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре псевдослучайной последовательности, пропускают через первый блок регулируемой задержки, перемножают его с сигналом со сложной фазовой манипуляцией, внутренняя структура которого соответствует структуре псевдослучайной последовательности и структуре встречно-штыревого преобразователя, принимаемым рупорной приемопередающей антенной, выделяют низкочастотное напряжение, пропорциональное первой корреляционной функции R1(τ), поддерживают его на максимальном уровне за счет изменения временной задержки первого блока регулируемой задержки и определяют дальность до обнаруженного объекта, одновременно улавливают переизлученный сигнал со сложной фазовой манипуляцией приемной антенной, разнесенной в горизонтальной плоскости от рупорной приемопередающей антенным на расстояние d, где d - измерительная база, сигналы со сложной фазовой манипуляцией, принимаемые двумя антеннами, последовательно умножают и делят по фазе на два, выделяют гармонические колебания и измеряют разность фаз между ними, формируя точную, но неоднозначную шкалу отсчета азимута на обнаруженный объект, сигнал со сложной фазовой манипуляцией, принимаемый рупорной приемопередающей антенной, пропускают через второй блок регулируемой задержки, перемножают его с сигналом со сложной фазовой манипуляцией, принимаемым приемной антенной, выделяют низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ), поддерживают его на максимальном уровне за счет изменения временной задержки второго блока регулируемой задержки и измеряют относительную временную задержку между сигналами, принимаемыми двумя антеннами, формируя грубую, но однозначную шкалу отсчета азимута на обнаруженный объект.
Поставленная задача решается тем, что устройство для обнаружения терпящих бедствие, содержащее, в соответствии с ближайшим аналогом, приемопередатчик, связанный с антенной и размещенный на объекте, относящемся к группе риска, и сканирующий блок, состоящий из задающего генератора и последовательно включенных усилителя мощности, циркулятора, вход-выход которого связан с рупорной приемопередающей антенной, первого усилителя высокой частоты, фазового детектора и компьютера, при этом приемопередающий блок выполнен в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, встречно-штыревой преобразователь, содержащий две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной, отличается от ближайшего аналога тем, что оно снабжено генератором псевдослучайной последовательности, фазовым манипулятором, двумя блоками регулируемой задержки, четырьмя перемножителями, двумя фильтрами нижних частот, двумя экстремальными регуляторами, индикатором дальности, приемной антенной, вторым усилителем высокой частоты, двумя узкополосными фильтрами, фазометром и указателем угла, причем к выходу задающего генератора подключен фазовый манипулятор, второй вход которого соединен с выходом генератора псевдослучайной последовательности, а выход подключен к входу усилителя мощности и к второму входу фазового детектора, к выходу фазового манипулятора последовательно подключены первый блок регулируемой задержки, первый перемножитель, второй вход которого соединен с выходом первого усилителя высокой частоты, первый фильтр нижних частот и первый экстремальный регулятор, выход которого соединен с вторым входом первого блока регулируемой задержки, к второму выходу которого подключен индикатор дальности, к выходу первого усилителя высокой частоты последовательно подключены второй перемножитель, второй вход которого соединен с выходом первого усилителя высокой частоты, первый делитель фазы на два, первый узкополосный фильтр и фазометр, к выходу приемной антенны последовательно подключены второй усилитель высокой частоты, третий перемножитель, второй вход которого соединен с выходом второго усилителя высокой частоты, второй делитель фазы на два и второй узкополосный фильтр, выход которого соединен с вторым входом фазометра, к выходу первого усилителя высокой частоты последовательно подключены второй блок регулируемой задержки, четвертый перемножитель, второй вход которого соединен с выходом второго усилителя высокой частоты, второй фильтр нижних частот и второй экстремальный регулятор, выход которого соединен с вторым входом второго блока регулируемой задержки, к второму выходу которого подключен указатель угла, приемная антенна разнесена в горизонтальной плоскости от рупорной приемопередающей антенны на расстояние d, где d - измерительная база.
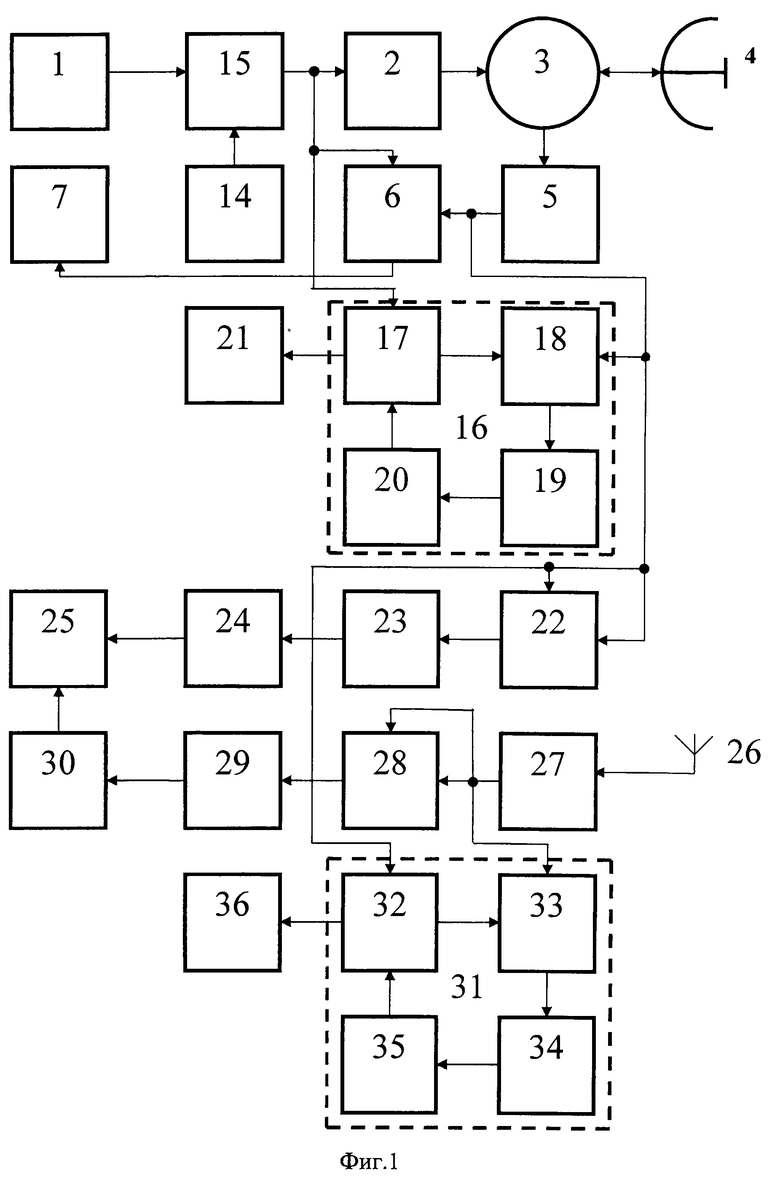
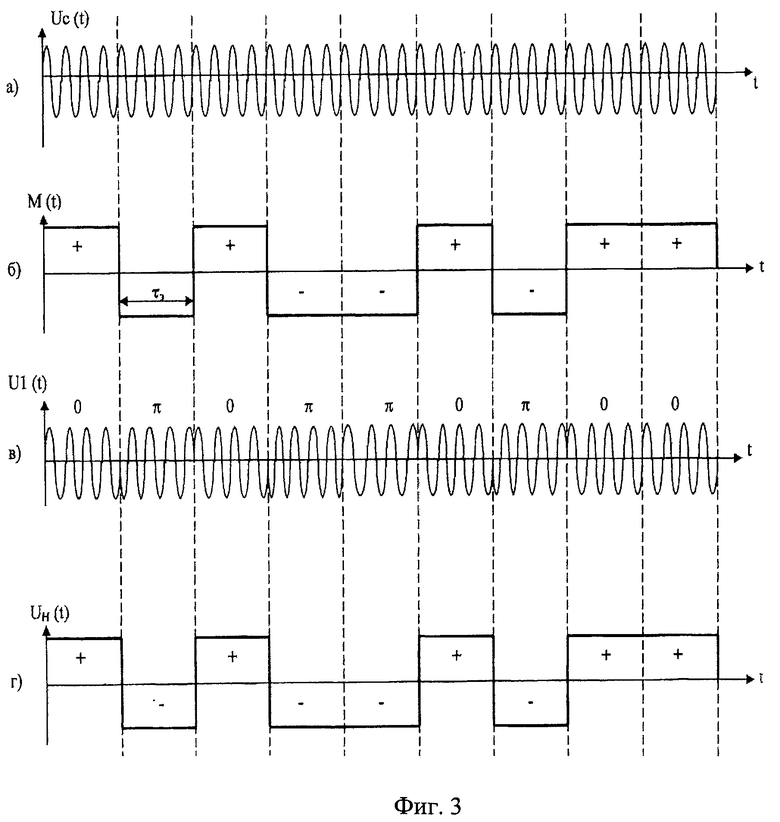
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг.1 и 2. Временные диаграммы, поясняющие принцип работы устройства, изображены на фиг.3.
Устройство содержит сканирующий блок (фиг.1) и приемопередающий блок (фиг.2), размещенный на объекте, относящемся к группе риска.
Сканирующий блок (фиг.1) содержит последовательно включенные задающий генератор 1, фазовый манипулятор 15, второй вход которого соединен с выходом генератора 14 псевдослучайной последовательности (ПСП), усилитель 2 мощности, циркулятор 3, вход-выход которого связан с рупорной приемопередающей антенной 4, первый усилитель 5 высокой частоты, фазовый детектор 6, второй вход которого соединен с выходом фазового манипулятора 15, и компьютер 7. К выходу фазового манипулятора 15 последовательно подключены первый блок 17 регулируемой задержки, первый перемножитель 18, второй вход которого соединен с выходом усилителя 5 высокой частоты, первый фильтр 19 нижних частот и первый экстремальный регулятор 20, выход которого соединен с вторым входом блока 17 регулируемой задержки, к второму выходу которого подключен индикатор 21 дальности. К выходу первого усилителя 5 высокой частоты последовательно подключены второй перемножитель 22, второй вход которого соединен с выходом усилителя 5 высокой частоты, первый делитель 23 фазы на два, первый узкополосный фильтр 24 и фазометр 25. К выходу приемной антенны 26 последовательно подключены второй усилитель 27 высокой частоты, третий перемножитель 28, второй вход которого соединен с выходом усилителя 27 высокой частоты, второй делитель 29 фазы на два и второй узкополосный фильтр 30, выход которого соединен с вторым входом фазометра 25. К выходу первого усилителя 5 высокой частоты последовательно подключены второй блок 32 регулируемой задержки, четвертый перемножитель 33, второй вход которого соединен с выходом усилителя 27 высокой частоты, второй фильтр 34 нижних частот и второй экстремальный регулятор 35, выход которого соединен с вторым входом блока 32 регулируемой задержки, второй выход которого подключен к указателю 36 угла.
Первый блок 17 регулируемой задержки, первый перемножитель 18, первый фильтр 19 нижних частот и первый экстремальный регулытор 20 образуют первый коррелятор 16.
Второй блок 32 регулируемой задержки, четвертый перемножитель 33, второй фильтр 34 нижних частот и второй экстремальный регулятор 35 образуют второй коррелятор 31.
Антенны 4 и 26 разнесены в горизонтальной плоскости на расстояние d, где d - измерительная база. Приемопередающий блок (фиг.2) выполнен в виде пьезокристалла 8 с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной 9 и набором отражателей 13. Встречно-штыревой преобразователь поверхностных акустических волн (ПАВ) содержит две гребенчатые системы электродов 10, шины 11 и 12, которые соединяют электроды каждой из гребенок между собой. Шины в свою очередь связаны с микрополосковой антенной 9.
Устройство работает следующим образом.
Задающим генератором 1 формируются высокочастотные колебания (фиг.3, а)
uc(t)=Uc·cos(ωct+φc), 0≤t≤Tc,
где Uc, ωс, φc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания, которое поступает на первый вход фазового манипулятора 15, на второй вход которого подается модулирующая псевдослучайная последовательность (ПСП) с выхода генератора 14 ПСП. Последний представляет собой регистр сдвига, охваченный логическими обратными связями. Обратная связь осуществляется путем сложения по модулю два выходных напряжения двух или более каскадов и подачи результирующего напряжения на вход первого каскада. Период повторения (длительность) такой кодовой последовательности m=2n-1, где n - число каскадов регистра сдвига.
На выходе фазового манипулятора 15 образуется фазовоманипулированный сигнал (ФМн)

 ,
,
где  - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующей ПСП, причем
- манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующей ПСП, причем  при кτэ<t<(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2, …, N-1);
при кτэ<t<(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2, …, N-1);
τэ, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью T1(T1=N1τэ), который через усилитель 2 мощности и циркулятор 3 поступает в рупорную приемопередающую антенну 4, излучается ею в направлении участка местности, где предположительно находится мобильный объект, улавливается микрополосковой антенной 9 приемопередатчика, размещенного на мобильном объекте. Последний представляет собой пьезокристалл 8 с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем ПАВ, который состоит их двух гребенчатых систем электродов 10, нанесенных на поверхность пьезокристалла 8. Электроды каждой из гребенок соединены друг с другом шинами 11 и 12. Шины в свою очередь связаны с микрополосковой антенной 9.
Принцип работы встречно-штыревого преобразователя ПАВ основан на том, что переменные в пространстве и времени электрические поля, создаваемые в пьезоэлектрическом кристалле системой электродов, вызывают из-за пьезоэффекта упругие деформации, которые распространяются в кристалле в виде ПАВ.
Поверхностные акустические волны - это волны, распространяющиеся вдоль поверхности твердых тел в относительно тонком поверхностном слое. Скорость распространения ПАВ в кристаллах примерно на пять порядков меньше скорости распространения электромагнитных колебаний. Это значит, что на сантиметре кристалла можно разместить информацию, которая заполнит кабель длиной в километр.
Высокая информационная емкость приборов на поверхностных акустических волнах впервые была использована в линиях задержки, которые позволяют хранить, преобразовывать, канализировать, отводить и отражать распространяющиеся в них сигналы.
В основе работы приборов на ПАВ лежат три физических процесса:
- преобразование входного электрического сигнала в акустическую волну;
- распространение акустической волны вдоль поверхности звукопровода;
- обратное преобразование ПАВ в электрический сигнал.
Для прямого и обратного преобразования ПАВ используются преобразователи поверхностных акустических волн, наибольшее распространение среди которых получили встречно-штыревые преобразователи.
Принимаемый ФМн-сигнал u1(t) преобразуется встречно-штыревым преобразователем в акустическую волну, которая распространяется по поверхности пьезокристалла 8, отражается от отражателей 13 и опять преобразуется в электромагнитный сигнал со сложной фазовой манипуляцией (ФМн)

где  ,
,
 - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с моделирующим кодом M(t) (фиг.3, б), причем
- манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с моделирующим кодом M(t) (фиг.3, б), причем  при кτэ<t<(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2, …, N2-1, N=N1+N2);
при кτэ<t<(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2, …, N2-1, N=N1+N2);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc(Tc=Nτэ).
При этом внутренняя структура сформированного ФМн-сигнала со сложной фазовой манипуляцией определяется структурой ПСП  и структурой встречно-штыревого преобразователя
и структурой встречно-штыревого преобразователя  имеет индивидуальный характер и содержит всю необходимую уникальную информацию об обнаруженном объекте (например, если это альпинист или турист, то фамилия, имя, отчество, год рождения и т.п.).
имеет индивидуальный характер и содержит всю необходимую уникальную информацию об обнаруженном объекте (например, если это альпинист или турист, то фамилия, имя, отчество, год рождения и т.п.).
Сформированный ФМн-сигнал 112(1) излучается микрополосковой антенной 9 в эфир и улавливается антеннами 4 и 26:


где  - время запаздывания переизлученного сигнала относительно зондирующего;
- время запаздывания переизлученного сигнала относительно зондирующего;
R - дальность от сканирующего блока до приемопередающего блока, размещенного на мобильном объекте;
C - скорость распространения волн.
ФМн-сигнал u3(t) с выхода рупорной приемопередающей антенны 4 через циркулятор 3 и усилитель 5 высокой частоты поступает на первый вход фазового детектора 6, на второй вход которого подается ФМн-сигнал u1(t) с выхода фазового манипулятора 15 в качестве опорного напряжения. В результате синхронного детектирования на выходе фазового детектора 6 образуется низкочастотное напряжение (фиг.3, г)
 ,
, 
где 
пропорциональное модулирующему коду M(t) (фиг.3, б). Это напряжение регистрируется и анализируется в компьютере 7.
ФМн-сигнал u3(t) и u4(t) с выходов усилителей 5, 27 высокой частоты одновременно получают на входы удвоителей 22 и 28 фазы, в качестве которых используются перемножители, на два входа которых подается один и тот же сигнал. На выходах перемножителей 22 и 28 образуются следующие гармонические напряжения:


где 
Так как 2φк(t-τз)={0; 2π}, то в указанных напряжениях фазовая манипуляция уже отсутствует.
Ширина спектра Δfc ФМн-сигнала определяется длительностью τэ его элементарных посылок Δfc=1/τэ. Тогда как ширина спектра Δf2 второй гармоники сигнала определяется длительностью Тс сигнала Δf2=1/Tc.
Следовательно, при удвоении фазы широкополосного ФМн-сигнала его спектр сворачивается в N раз Δfc/Δf2=N.
Напряжения u5(t) и u6(t) поступают на входы делителей 23 и 29 фазы на два соответственно, на выходе которых образуются следующие гармонические напряжения:


которые выделяются узкополосными фильтрами 24, 30 и поступают на два входа фазометра 25. Фазометром 25 измеряется разность фаз
где d - расстояние между антеннами 4 и 26 (измерительная база);
λ - длина волны;
α - угловая координата (азимут) на обнаруженный мобильный объект.
Так формируется фазовая шкала отсчета угловой координаты α: точная, но неоднозначная.
ФМн-сигнал u1(t) с выхода фазового манипулятора 15 одновременно поступает на первый вход перемножителя 18 через первый блок 17 регулируемой задержки

где τ - переменная задержка, вводимая блоком 17 регулируемой задержки.
На второй вход перемножителя 18 подается ФМн-сигнал из u3(t) с выхода усилителя 5 высокой частоты. Полученное на выходе перемножителя 18 напряжение пропускается через фильтр 19 нижних частот, на выходе которого формируется низкочастотное напряжение, пропорциональное корреляционной функции R1(τ). Экстремальный регулятор 20, предназначенный для поддержания максимального значения корреляционной функции R1(τ) и подключенный к выходу фильтра 19 нижних частот, воздействует на управляющий вход блока 17 регулируемой задержки и поддерживает вводимую им задержку τ равной τз(τ=τз), что соответствует максимальному значению корреляционной функции R1(τ). Указатель 21 дальности, связанный со шкалой блока 17 регулируемой задержки, позволяет непосредственно считывать измеренное значение дальности R от сканирующего блока до приемопередающего блока, размещенного на мобильном объекте

Одновременно ФМн-сигналы u3(1) и u4(t) с выходов усилителей 5 и 27 высокой частоты поступают на два входа второго коррелятора 31, состоящего из второго блока 32 регулируемой задержки, второго перемножителя 33, второго фильтра 34 нижних частот и второго экстремального регулятора 35. В этом случае шкала второго блока 32 регулируемой задержки (указатель угла 36) градуируется непосредственно в значениях угловой координаты обнаруженного мобильного объекта
где τз1=t1-t2,
t1 t2 - время прохождения переизлученного ФМн-сигнала u2(t) расстояний от мобильного объекта до антенн 4 и 26 соответственно.
Так формируется временная шкала отсчета угловой координаты (азимута): грубая, но однозначная.
К основным характеристикам устройства для обнаружения местонахождения мобильных объектов можно отнести следующие:
- мощность передатчика сканирующего блока средняя - не более 100 МВт;
- частотный диапазон - 400-420 МГц (900-920 МГц);
- дальность обнаружения - не менее 2000 м;
- количество кодовых комбинаций - 232-2128;
- тип излучаемого сигнала - сигнал с фазовой манипуляцией;
- тип отраженного (переизлученного) сигнала - широкополосный сигнал с фазовой манипуляцией (база сигнала B=Δfc, Тс=200-1000, Δfc - ширина спектра);
- габариты приемопередатчика, размещенного на мобильном объекте - 8×15×5 мм;
- срок службы приемопередатчика - не менее 20 лет;
- потребляемая приемопередатчиком мощность - 0 Вт.
Каждый предполагаемый участник мероприятий, которые могут сделать этого участника потенциально пострадавшим, относится к группе риска и должен быть снабжен достаточно простым, надежным и миниатюрным устройством (типа брелка, кольца или небольшого медальона), которое не должно затруднять обычную жизнедеятельность владельца, но должно нести на себе необходимую уникальную информацию об этом владельце.
Второе важное требование к этому устройству - предоставляемая возможность дистанционного считывания несущей им информации неограниченное число раз, без какого бы то ни было участия владельца, и через продолжительное время, например после засыпания.
Основным преимуществом применения приемопередатчика на ПАВ является возможность изготовить пассивный, т.е. не требующий источников питания, приемопередатчик с малыми габаритами. Другое преимущество заключается в возможности совмещения функций переизлучения энергии, кодирования постоянной информации о мобильном объекте и функций датчика какой-либо физической величины в одном устройстве с простой конструкцией.
Положительным свойством приемопередатчика на ПАВ являются также малые затраты на длительную эксплуатацию (отсутствие батарей и большое время наработки на отказ).
Большим преимуществом предлагаемых способа и устройства является также использование в них биологически безопасных, специальным образом синтезированных сигналов с фазовой манипуляцией.
С точки зрения обнаружения указанные сигналы обладают энергетической и структурной скрытностью.
Энергетическая скрытность широкополосных ФМн-сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого широкополосный ФМн-сигнал в точке приема может оказаться замаскирован шумами и помехами. Причем энергия широкополосного сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность широкополосных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку широкополосных сигналов априорно неизвестной структуры с целью повышения чувствительности приемного устройства.
Широкополосные ФМн-сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность выделять эти сигналы среди других сигналов и помех, действующих в той же полосе частот и в те же промежутки времени.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами обеспечивают не только поиск, обнаружение объекта и определение его принадлежности, но и позволяют точно и однозначно определять направление на обнаруженный объект и дальность до его местонахождения. При этом повышение точности пеленгации обнаруженного объекта достигается увеличением измерительной базы d, а возникающая при этом неоднозначность устраняется корреляционной обработкой принимаемых сигналов с фазовой манипуляцией. Тем самым функциональные возможности способа и устройства расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2370792C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431870C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434253C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410729C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2515191C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2306159C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369418C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2482896C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327498C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2401438C1 |
Предлагаемые способ и устройство относятся к области поисково-спасательных систем и могут быть использованы для дистанционного поиска и обнаружения терпящих бедствие. Достигаемый технической результат изобретения - расширение функциональных возможностей способа и устройства для его осуществления путем точного определения направления на обнаруженный объект и дальности до его местонахождения. Устройство, реализующее способ, содержит сканирующий блок и приемопередающий блок, размещенный на мобильном объекте. Сканирующий блок содержит задающий генератор, усилитель мощности, циркулятор, рупорную приемопередающую антенну, два усилителя высокой частоты, фазовый детектор, компьютер, генератор псевдослучайной последовательности (ПСП), фазовый манипулятор, два коррелятора, два блока регулируемой задержки, четыре перемножителя, два фильтра нижних частот, два экстремальных регулятора, индикатор дальности, два делителя фазы на два, два узкополосных фильтра, фазометр, приемную антенну и указатель угла, определенным образом соединенные между собой. Приемопередающий блок содержит пьезокристалл, микрополосковую антенну, две гребенчатые системы электродов, шины и набор отражателей. 2 н.п. ф-лы, 3 ил.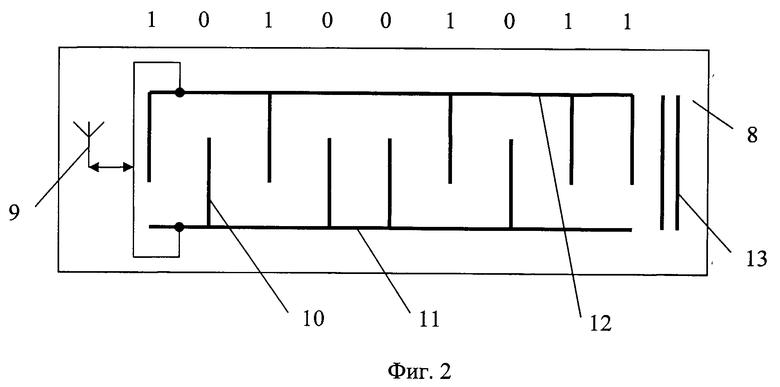
1. Способ обнаружения терпящих бедствие, заключающийся в предварительном размещении на объекте, относящемся к группе риска, маломощного приемопередатчика, при этом в качестве приемопередатчика используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, облучают с помощью сканирующего блока участок местности, где может находиться объект, направленным электромагнитным сигналом, принимают его на объекте, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну опять в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, принимают сканирующим блоком, усиливают по амплитуде, осуществляют синхронное детектирование, регистрируют выделенный аналог модулирующего кода, соответствующий структуре встречно-штыревого преобразователя, анализируют его и определяют принадлежность обнаруженного объекта, отличающийся тем, что направленный электромагнитный сигнал перед облучением манипулируют по фазе псевдослучайной последовательностью, сформированный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре псевдослучайной последовательности, пропускают через первый блок регулируемой задержки, перемножают его с сигналом со сложной фазовой манипуляцией, внутренняя структура которого соответствует структуре псевдослучайной последовательности и структуре встречно-штыревого преобразователя, принимаемым рупорной приемопередающей антенной, выделяют низкочастотное напряжение, пропорциональное первой корреляционной функции R1(τ), поддерживают его на максимальном уровне за счет изменения временной задержки первого блока регулируемой задержки и определяют дальность до обнаруженного объекта, одновременно улавливают переизлученный сигнал со сложной фазовой манипуляцией приемной антенной, разнесенной в горизонтальной плоскости от рупорной приемопередающей антенны на расстояние d, где d - измерительная база, сигналы со сложной фазовой манипуляцией, принимаемые двумя антеннами, последовательно умножают и делят по фазе на два, выделяют гармонические колебания и измеряют разность фаз между ними, формируя точную, но неоднозначную шкалу отсчета азимута на обнаруженный объект, сигнал со сложной фазовой манипуляцией, принимаемый рупорной приемопередающей антенной, пропускают через второй блок регулируемой задержки, перемножают его с сигналом со сложной фазовой манипуляцией, принимаемым приемной антенной, выделяют низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ), поддерживают его на максимальном уровне за счет изменения временной задержки второго блока регулируемой задержки и измеряют относительную временную задержку между сигналами, принимаемыми двумя антеннами, формируя грубую, но однозначную шкалу отсчета азимута на обнаруженный объект.
2. Устройство для обнаружения терпящих бедствие, содержащее приемопередатчик, связанный с антенной и размещенный на объекте, относящемся к группе риска, и сканирующий блок, состоящий из задающего генератора и последовательно включенных усилителя мощности, циркулятора, вход-выход которого связан с рупорной приемопередающей антенной, первого усилителя высокой частоты, фазового детектора и компьютера, при этом приемопередающий блок выполнен в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой их гребенок соединены друг с другом шинами, связанными с микрополосковой антенной, отличающееся тем, что оно снабжено генератором псевдослучайной последовательности, фазовым манипулятором, двумя блоками регулируемой задержки, четырьмя перемножителями, двумя фильтрами нижних частот, двумя экстремальными регуляторами, индикатором дальности, приемной антенной, вторым усилителем высокой частоты, двумя узкополосными фильтрами, фазометром и указателем угла, причем к выходу задающего генератора подключен фазовый манипулятор, второй вход которого соединен с выходом генератора псевдослучайной последовательности, а выход подключен к входу усилителя мощности и к второму входу фазового детектора, к выходу фазового манипулятора последовательно подключены первый блок регулируемой задержки, первый перемножитель, второй вход которого соединен с выходом первого усилителя высокой частоты, первый фильтр нижних частот и первый экстремальный регулятор, выход которого соединен с вторым входом первого блока регулируемой задержки, к второму выходу которого подключен индикатор дальности, к выходу первого усилителя высокой частоты последовательно подключены второй перемножитель, второй вход которого соединен с выходом первого усилителя высокой частоты, первый делитель фазы на два, первый узкополосный фильтр и фазометр, к выходу приемной антенны последовательно подключены второй усилитель высокой частоты, третий перемножитель, второй вход которого соединен с выходом второго усилителя высокой частоты, второй делитель фазы на два и второй узкополосный фильтр, выход которого соединен с вторым входом фазометра, к выходу первого усилителя высокой частоты последовательно подключены второй блок регулируемой задержки, четвертый перемножитель, второй вход которого соединен с выходом второго усилителя высокой частоты, второй фильтр нижних частот и второй экстремальный регулятор, выход которого соединен с вторым входом второго блока регулируемой задержки, к второму выходу которого подключен указатель угла, приемная антенна разнесена в горизонтальной плоскости от рупорной приемопередающей антенны на расстояние d, где d - измерительная база.
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2248235C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2370792C2 |
| RU 2008108957 A, 10.09.2009 | |||
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2004 |
|
RU2278418C2 |
| Передача с мальтийским крестом | 1947 |
|
SU75199A1 |
| WO 9723786 A1, 03.07.1997 | |||
| WO 2009112935 A1, 17.09.2009. | |||

