Предлагаемая система относится к области медицинской техники, а именно к средствам и системам дистанционного контроля за передвижением машин скорой помощи, и может быть использована в городских учреждениях практического здравоохранения.
Известны системы и устройства местоопределения и диспетчеризации наземного транспорта (авт. свид. СССР №№215.536, 477.330, 498.636, 696.508, 769.581, 830.447, 1.123.041; патенты РФ №№2.033.352, 2.042.548, 2.061,323, 2.184.992; В.Бобрин и др. Радиосистемы дальней навигации. "Автомобильный транспорт", 1991, №12, с.23, рис.2 и другие).
В качестве базового объекта следует считать европейскую систему диспетчеризации городского и пригородного транспорта (В.Бобрин и др. Радиосистемы дальней навигации. "Автомобильный транспорт", 1991, №12, с.23, рис.2), использующую сигналы глобальной навигационной системы "Навстар".
Данная система позволяет определять местоположение транспортного средства с точностью до 100 м, а при так называемом методе дифференциальной коррекции погрешности (измерение координат относительно заведомо известной точки - диспетчерского геодезического пункта) до 2-5 м.
Технической задачей изобретения является повышение оперативности дистанционного контроля с диспетчерского пункта за текущим географическим положением и состоянием парка машин скорой помощи, а также повышение надежности и достоверности обмена дискретными и аналоговыми сообщениями между диспетчерами, водителями и бригадами машин скорой помощи и врачами больниц, госпиталей и поликлиник.
Поставленная задача решается тем, что система местоопределения и диспетчеризации мобильных бригад скорой помощи, содержащая спутники навигационной системы "Навстар", бортовой комплекс, установленный на машине скорой помощи и содержащий последовательно включенные приемную антенну, приемник GPS-сигналов, блок сопряжения, первый вход-выход которого через радиостанцию соединен с приемопередающей антенной, а второй вход-выход с микропроцессором, а также датчики дополнительной информации, подключенные к блоку сопряжения, ретранслятор с приемопередающей антенной, установленный в центральной части города, и стационарную аппаратуру, установленную на диспетчерском пункте с известными координатами, полученными в результате прецизионной геодезической съемки и состоящую из последовательно включенных приемной антенны, приемника GPS-сигналов, блока сопряжения, первый вход-выход которого через радиостанцию соединен с приемопередающей антенной, а второй вход-выход соединен через персональную ЭВМ с дисплеем и устройством документации, снабжена дисплеем, установленным на машине скорой помощи и подключенным к микропроцессору, радиостанцией, установленной на профильном медицинском учреждении, первый вход-выход которой соединен с приемопередающей антенной, а второй вход-выход через блок сопряжения соединен с микропроцессором, причем каждый приемник GPS-сигналов состоит из последовательно подключенных к приемной антенне усилителя высокой частоты, смесителя, второй вход которого соединен с выходом гетеродина, усилителя промежуточной частоты, первого перемножителя, второй вход которого соединен с выходом фильтра нижних частот, узкополосного фильтра, второго перемножителя, второй вход которого соединен с выходом усилителя промежуточной частоты, и фильтра нижних частот, выход которого является выходом приемника, каждая радиостанция использует сложные сигналы с комбинированной фазовой манипуляцией и амплитудной модуляцией, которые излучаются на одной частоте WI, а принимаются на другой частоте WII, и состоит из последовательно включенных задающего генератора, вход управления которого через блок сопряжения соединен с микропроцессором, фазового манипулятора, второй вход которого соединен с выходом источника дискретных сообщений, амплитудного модулятора, второй вход которого соединен с выходом источника, аналоговых сообщений, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, антенного переключателя, вход-выход которого соединен с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, амплитудного ограничителя и синхронного детектора, второй вход которого соединен с выходом усилителя второй промежуточной частоты, а выход подключен к микропроцессору, к выходу амплитудного ограничителя последовательно подключены перемножитель, второй вход которого соединен с выходом второго гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к микропроцессору, выходы управления источников дискретных и аналоговых сообщений через блок сопряжения подключены к микропроцессору.
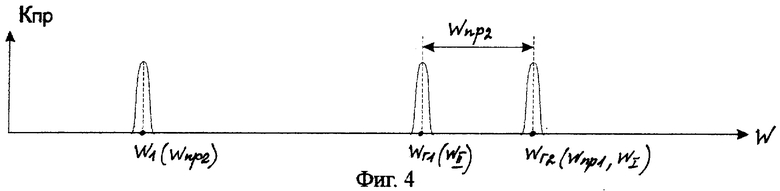
Общая композиционная схема системы представлена на фиг.1. Структурная схема приемника GPS-сигналов изображена на фиг.2. Структурная схема радиостанции изображена на фиг.3. Частотная диаграмма, поясняющая работу радиостанции, показана на фиг.4. Временные диаграммы, поясняющие работу системы, показаны на фиг.5, 6 и 7.
Система местоопределения и диспетчеризации мобильных бригад скорой помощи содержит спутники 1.L (L=1, 2...24) навигационной системы "Навстар", ретранслятор 3 с приемопередающей антенной 2, установленный в центральной части города, диспетчерский пункт 4 с известными координатами, полученными в результате прецизионной геодезической съемки, состоящей из последовательно включенных приемной антенны 7, приемника 9 GPS-сигналов, блока 11 сопряжения, первый вход-выход которого через радиостанцию 10 соединен с приемопередающей антенной 8, а второй вход-выход соединен через персональную ЭВМ 12 с дисплеем 13 и устройством 14 документации, машины 5.i (i=1, 2...n) скорой помощи, бортовой комплекс которых содержит последовательно включенные приемную антенну 15.i, приемник 17.i GPS-сигналов, блок 19.i сопряжения, первый вход-выход которого через радиостанцию 18.i соединен с приемопередающей антенной 16.i, второй вход-выход - с микропроцессором 20.i, к которому подключен бортовой дисплей 22.i, а также датчики 21.i дополнительной информации, подключенные к блоку 19.i сопряжения, и стационарную аппаратуру 6.j (j=1, 2...m), установленную на профильных медицинских учреждениях (больницы, госпитали, поликлиники и т.п.) и состоящую из радиостанции 24.j, первый вход-выход которой соединен с приемопередающей антенной 23.j, а второй вход-выход соединен через блок 25.j сопряжения с вход-выходом микропроцессора 26.j.
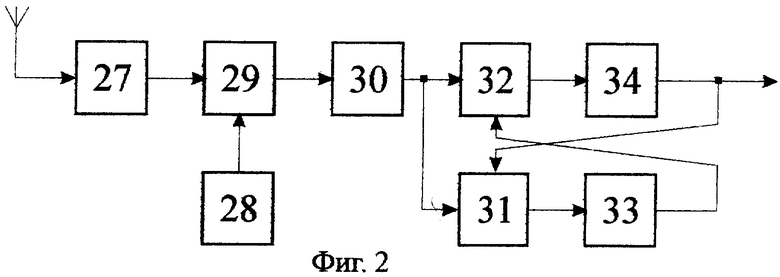
Каждый приемник GPS-сигналов состоит из последовательно подключенных к приемной антенне усилителя 27 высокой частоты, смесителя 29, второй вход которого соединен с выходом гетеродина 28, усилителя 30 промежуточной частоты, первого перемножителя 31, второй вход которого соединен с выходом фильтра 34 нижних частот, узкополосного фильтра 33, второго перемножителя 32, второй вход которого соединен с выходом усилителя 30 промежуточной частоты, и фильтра 34 нижних частот, выход которого является выходом приемника.
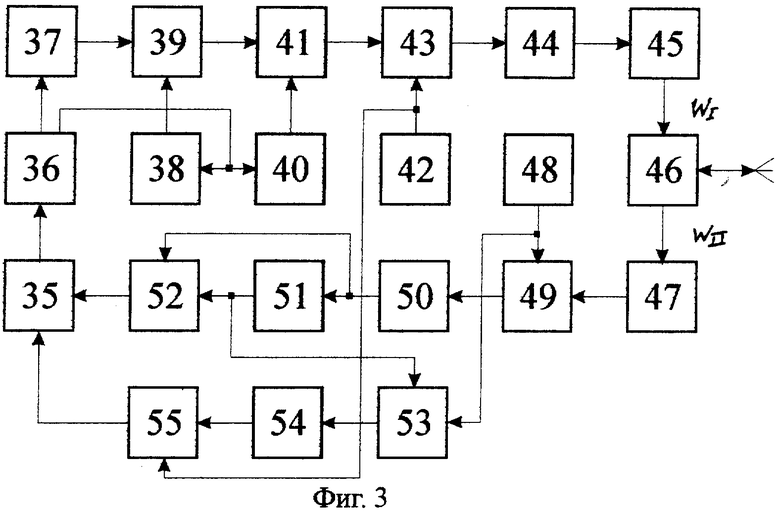
Каждая радиостанция состоит из последовательно включенных задающего генератора 37, вход управления которого через блок 36 сопряжения подсоединен к микропроцессору 35, фазового манипулятора 39, второй вход которого соединен с выходом источника 38 дискретных сообщений, амплитудного модулятора 41, второй вход которого соединен с выходом источника 40 аналоговых сообщений, первого смесителя 43, второй вход которого соединен с выходом первого гетеродина 42, усилителя 44 первой промежуточной частоты, первого усилителя 45 мощности, антенного переключателя 46, вход-выход которого соединен с приемопередающей антенной, второго усилителя 47 мощности, второго смесителя 49, второй вход которого соединен с выходом второго гетеродина 48, усилителя 50 второй промежуточной частоты, амплитудного ограничителя 51 и синхронного детектора 52, второй вход которого соединен с выходом усилителя 50 второй промежуточной частоты, а выход подключен к микропроцессору 35, к выходу амплитудного ограничителя 51 последовательно подключены перемножитель 53, второй вход которого соединен с выходом второго гетеродина 48, полосовой фильтр 54 и фазовый детектор 55, второй вход которого соединен с выходом первого гетеродина 42, а выход подключен к микропроцессору 35, вход управления источников дискретных 38 и аналоговых 40 сообщений через блок 36 сопряжения соединен с микропроцессором 35.
Система работает следующим образом.
Работа системы базируется на использовании сигналов, излучаемых спутниками 1.L (L=1, 2, ...24) навигационной системы "Навстар".
Глобальная навигационная система GPS (Global Positioning System), известная так же, как Navstar (Navigation System with Time and Ranging - Навигационная система определения времени и дальности) предназначена для передачи навигационных сигналов, которые могут одновременно приниматься во всех регионах мира.
Каждый GPS-спутник излучает на двух частотах (1.575.МГц и 12.275 МГц) специальный навигационный сигнал в виде бинарного фазоманипулированного (ФМн) сигнала, манипулированного по фазе псевдослучайной последовательностью. В навигационном сигнале зашифрованы два вида кода. Один из них - код С/А доступен широкому кругу гражданских потребителей, в том числе и предлагаемой системе. Он позволяет получать лишь приблизительную оценку местоположения машин скорой помощи, поэтому называется "Грубым" кодом. Передача кода С/А осуществляется на частоте WC=1.575 МГц с использованием фазовой манипуляции псевдослучайной последовательностью длиной 1023 символа (элементарных посылок). Защита от ошибок обеспечивается с помощью кода Гоулда. Период повторения С/А кода - 1 мс. Тактовая частота - 1.023 МГц.
Другой код - Р обеспечивает более точное вычисление координат, но пользоваться им способны не все, доступ к нему ограничивается провайдером услуг GPS, используется он военным ведомством США.
В состав системы "Навстар" входят космический сегмент, состоящий из 24 КА, сеть наземных станций наблюдения за их работой и пользовательский сегмент (навигационные приемники GPS-сигналов). Все спутники 1.L (L=1, 2 ...24) являются автономными. Параметры их орбит периодически контролируются сетью наземных станций слежения, с помощью которых не реже 1-2 раз в сутки вычисляются баллистические характеристики, регистрируются отклонения КА от расчетных траекторий движения и определяется собственное время бортовых часов.
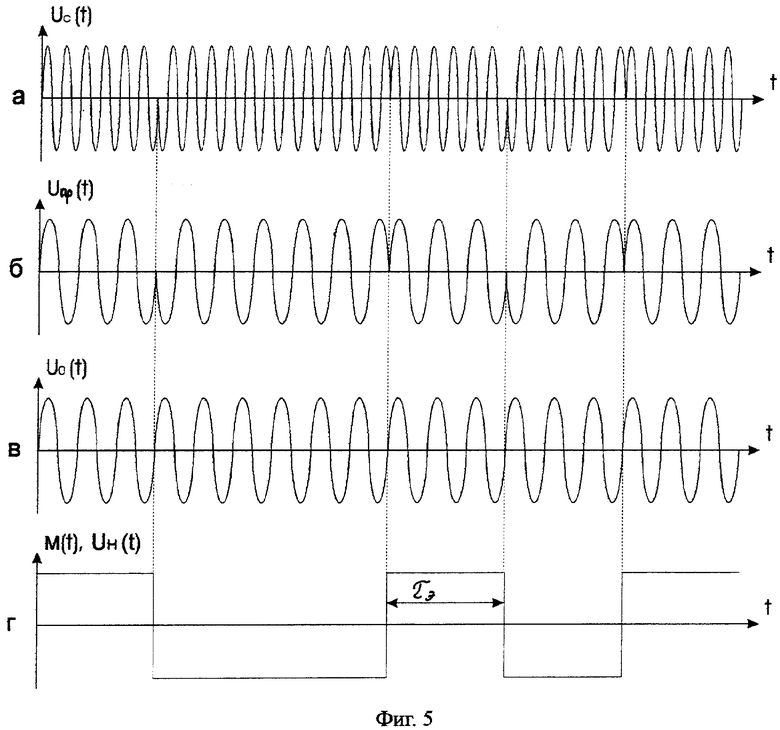
Для определения местоположения контролируемой машины скорой помощи приемник 17.i (i=1, 2, ...n) принимает ФМн-сигнал (фиг.5,а)
 0≤t≤TС,
0≤t≤TС,
где VC, WC, ϕC, ТC - амплитуда, несущая частота, начальная фаза и длительность сигнала;
ϕK(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем ϕк(t)=const при Кτэ<t<(K+1)τэ, и может изменяться скачком при t=Кτэ, т.е. на границах между элементарными посылками (К=1, ..., N-1);
τэ, N - длительность и количество элементарных посылок (символов), из которых составлен сигнал длительностью ТС(ТС=NτЭ, N=1023).
Этот сигнал с выхода приемной антенны через усилитель 27 высокой частоты поступает на первый вход смесителя 29, на второй вход которого подается напряжение гетеродина 28

где VГ, WГ, ϕГ - амплитуда, частота и начальная фаза напряжения гетеродина.
На выходе смесителя 29 образуются напряжения комбинационных частот. Усилителем 30 выделяется напряжение промежуточной (разностной) частоты (фиг. 5,б)
 0≤t≤TС,
0≤t≤TС,
где Vпр=·1/2К1·VС·VГ;
К1 - коэффициент передачи смесителя;
Wпр=WС-WГ - промежуточная частота;
ϕпр=ϕС-ϕГ,
которое одновременно поступает на входы перемножителей 31 и 32. На второй вход перемножителя 32 с выхода узкополосного фильтра 33 подается опорное напряжение (фиг.5,в)
 0≤t≤TС,
0≤t≤TС,
В результате перемножения указанных напряжений образуется результирующее напряжение.

где VΣ=1/2К2·Vпр·Vо;
K2 - коэффициент передачи перемножителя.
Аналог модулирующего кода М(t)

выделяется фильтром 34 нижних частот и подается на выход приемника и на второй вход перемножителя 31. На выходе последнего образуется гармоническое колебание

Данное колебание выделяется узкополосным фильтром 33 и подается на второй вход перемножителя 32.
Перемножители 31 и 32, узкополосный фильтр 33 и фильтр 34 нижних частот образуют демодулятор ФМн-сигналов.
В данном демодуляторе опорное напряжение, необходимое для синхронного детектирования принимаемого ФМн-сигнала, выделяется непосредственно из самого принимаемого сигнала и отсутствует явление "обратной работы", присущее известному устройству (Пистолькорса А.А., Сифорова В.И., Костаса В.Ф., Травина Г.А.), выделяющим опорное напряжение из самого принимаемого ФМн-сингала.
Приемник GPS-сигналов попеременно использует два основных режима работы - приема информации и навигационный.
В навигационном режиме каждую секунду уточняется местоположение машины скорой помощи, и выдаются основные навигационные данные. В режиме приема информации принимаются данные эфемерид и поправок времени, необходимые для навигационного режима, и производятся более редкие (через одну минуту) навигационные измерения.
Микропроцессор 20.i (i=1, 2, ... n), входящий в состав бортового комплекса, машины 5.i скорой помощи, выполняет две функции: обслуживает приемник 17.i и производит навигационные расчеты. Первая заключается в выборе рабочего созвездия спутников L.1 (L=1, 2, ... 24), вычислении данных целеуказания, хранении оценок фазы кода и несущей, синхронизации по битам, кадрам и управлении работой приемника, например переключении из режима приема информации в навигационный режим и обратно. Вторая функция микропроцессора 20.i состоит в расчете эфемерид, определении координат местоположения машины 5.i скорой помощи и выдаче для отображения на дисплей 22.i координат места.
Приемник 17.i работает в навигационном режиме до тех пор, пока геометрия расположения спутников остается удовлетворительной или пока не устарели эфемериды. Для определения двух координат места (широты и долготы) и времени необходимы измерения от трех спутников. В данном приемнике информация от четвертого "лишнего" спутника может оказаться необходимой во время различных маневров машины скорой помощи, когда возможно затенение сигналов одного или более спутников.
Стандартный приемник GPS-сигналов обеспечивает время обнаружения спутника не более 3-4 минут и погрешность определения координат машины скорой помощи не более 100 м.
Для повышения точности определения местонахождения машины скорой помощи применяется метод дифференциальных поправок, который основан на использовании известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим позволяет определить координаты наблюдаемой машины скорой помощи с точностью до 5 м в динамической навигационной обстановке и до 2 м - в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного приемника 9 GPS-сигналов, установленного на диспетчерском пункте 4 с известными координатами, полученными в результате прецизионной геодезической съемки. Сравнивая известные координаты с измеренными, контрольный приемник 9 GPS-сигналов и ЭВМ 12 вырабатывают поправки, которые передаются на машину скорой помощи по радиоканалу в заранее установленном формате. Поправки, принятые от диспетчерского пункта 4, автоматически вносятся в результаты собственных измерений машины 5.i (i=1, 2, ... n) скорой помощи.
Обмен дискретными и аналоговыми сообщениями между диспетчерским пунктом 4, машиной 5.i (i=1, 2, ... n) скорой помощи и профильным медицинским учреждением 6.j (j=1, 2...m) осуществляется по радиоканалам непосредственно и/или через ретранслятор 3, установленный в центральной части города. Для этого предназначены радиостанции, работающие в дуплексном режиме.
С помощью микропроцессора 35 включается задающий генератор 37, который формирует высокочастотное напряжение (фиг.6,а)
 0≤t≤T1,
0≤t≤T1,
которое поступает на первый вход фазового манипулятора 39, на второй вход которого подается модулирующий код M1 (t) (фиг.6,б) с выхода источника 38 дискретных сообщений. На выходе фазового манипулятора 39 образуется фазоманипулированный (ФМн) сигнал (фиг.6,в)
 0≤t≤T1,
0≤t≤T1,
который поступает на первый вход амплитудного модулятора 41, на второй вход которого подается модулирующая функция, m1(t) (фиг.6,г) с выхода источника аналоговых сообщений. На выходе амплитудного модулятора 41 образуется сложный сигнал с комбинированной фазовой манипуляцией и амплитудной модуляцией (ФМн-АМ) (фиг.6,д)
 0≤t≤T1,
0≤t≤T1,
где m1(t) - модулирующая функция, отображающая закон амплитудной модуляции.
Работа источников дискретных 38 и аналоговых 40 сообщений синхронизируется микропроцессором 35 через блок 36 сопряжения.
Сформированный сигнал U3(t) поступает на первый вход смесителя 43, на второй вход которого подается напряжение первого гетеродина 42

На выходе смесителя 43 образуются напряжения комбинационных частот. Усилителем 44 выделяется напряжение первой промежуточной (суммарной) частоты (фиг.6,е)
 0≤t≤T1,
0≤t≤T1,
где Vпр1=1/2K1·V1·Vг1;
Wпр1=W1-WГ1 - первая промежуточная частота;
ϕпр1=ϕ1-ϕГ1
которое усиливается в усилителе 45 мощности и через антенный переключатель 46 и приемопередающую антенну излучается в эфир.
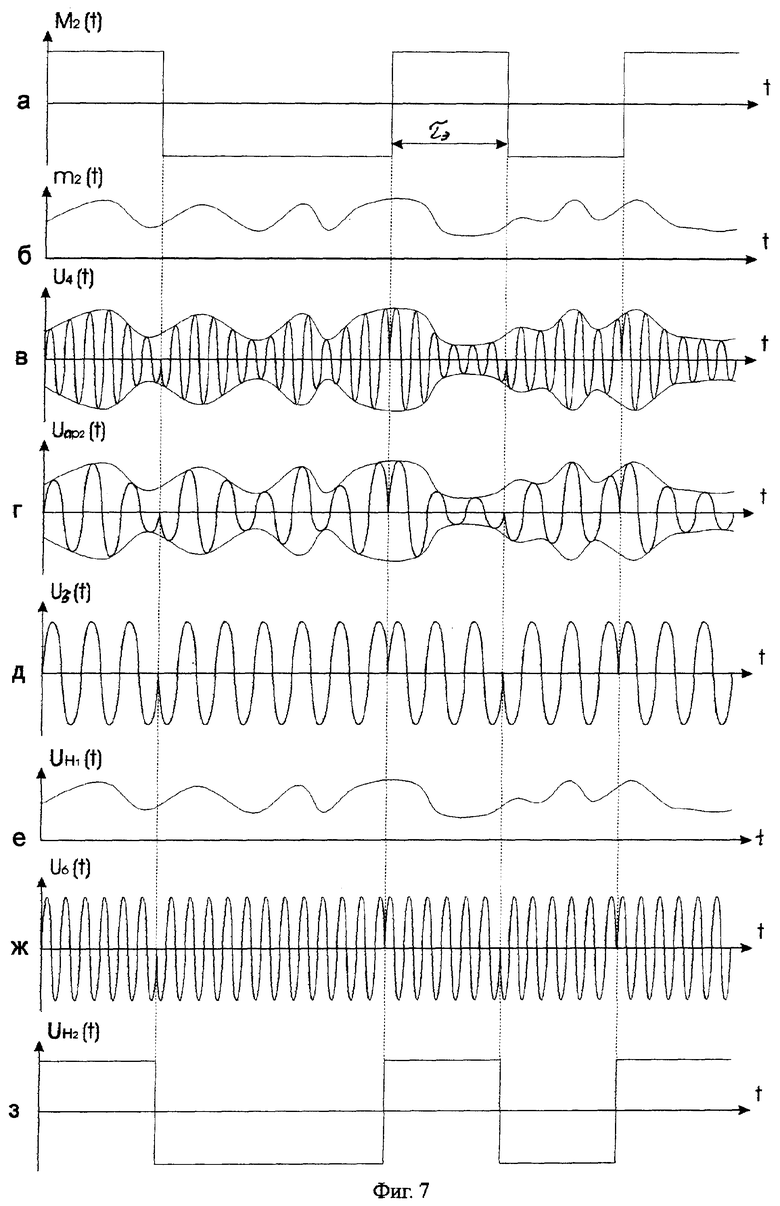
Напряжение, представляющее собой сложный ФМн-АМ-сигнал, излучаемый другой радиостанцией (фиг.7,в)
 0≤t≤T2,
0≤t≤T2,
где WГI=WII,
принимается антенной, усиливается усилителем 47 и поступает на первый вход второго смесителя 49, на второй вход которого подается напряжение второго гетеродина 48

На выходе смесителя 49 образуются напряжения комбинационных частот. Усилителем 50 выделяется напряжение второй промежуточной (разностной) частоты (фиг.7,г).
 0≤t≤T2,
0≤t≤T2,
где Vпр2=1/2 K1·V2·VГ2;
Wпр2=WГ1-WГ2 - вторая промежуточная частота;
ϕпр2=ϕ2-ϕГ2
Это напряжение поступает на вход амплитудного ограничителя 51, на выходе которого образуется напряжение (фиг.7,д)
 0≤t≤T2,
0≤t≤T2,
где Vо - порог ограничения амплитудного ограничителя, которое представляет собой ФМн-сигнал и поступает на опорный вход синхронного детектора 52 в качестве опорного напряжения.
На информационный вход синхронного детектора 52 поступает напряжение Uпр2(t) с выхода усилителя 50 второй промежуточной частоты. На выходе синхронного детектора 52 образуется низкочастотное напряжение (фиг.7,е).

где VН1=1/2К3·Vпр2·Vо;
K3 - коэффициент передачи синхронного детектора,
пропорциональное модулирующей функции m2(t) (фиг.7,б). Это напряжение поступает в микропроцессор 35.
Напряжение U5(t) (фиг.7,д) с выхода амплитудного ограничителя 51 одновременно поступает на первый вход перемножителя 53, на второй вход которого подается напряжение UГ2(t) с выхода второго гетеродина 48. На выходе перемножителя 53 образуется напряжение (фиг.7,ж).
 0≤t≤T2,
0≤t≤T2,
где V6=1/2 K2·V0·VГ2;
WГ1=WГ2-Wпр2;
ϕГ1=ϕГ2-ϕпр2.
которое представляет собой ФМн-сигнал на частоте WГ1 первого гетеородина 42. Это напряжение выделяется полосовым фильтром 54 и поступает на информационный вход фазового детектора 55, на опорный вход которого подается напряжение UГ1(t) первого гетеродина 42. На выходе фазового детектора 55 образуется низкочастотное напряжение (фиг.7,з)

где VH2=·1/2K4·V6·VГ1;
К4 - коэффициент передачи фазового детектора,
пропорциональное модулирующему коду M2(t) (фиг.7,а). Это напряжение поступает в микропроцессор 35.
Таким образом, предлагаемая система по сравнению с базовым объектом и другими техническими решениями аналогичного назначения обеспечивает повышение оперативности дистанционного контроля с диспетчерского пункта за текущим географическим положением и состоянием парка машин скорой помощи, а также повышение надежности и достоверности обмена дискретными и аналоговыми сообщениями между диспетчерами, водителями и мобильными бригадами машин скорой помощи и врачами больниц, госпиталей и поликлиник. Это достигается использованием сложных сигналов с комбинированной фазовой манипуляцией и амплитудной модуляцией, обладающих высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-АМ-сигнал в точке приема может оказаться замаскированным шумами. Причем энергия сложного ФМн-АМ-сигнала отнюдь не мала, она просто распределена по частотновременной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов.
Структурная скрытность сложных ФМн-АМ-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-АМ-сигналов априорно неизвестной структуры.
Кроме того, указанные сигналы позволяют применять новый вид селекции - структурную селекцию.
На диспетчерском пункте монтируются рабочие места диспетчеров с дисплеями для визуального отображения на компьютерной карте местности текущего положения машин скорой помощи и обмена сообщениями с ними. Аналогичными миниатюрными дисплеями снабжены и машины скорой помощи.
Предлагаемая система обеспечивает возможность для оперативного оказания скорой медицинской помощи больным и пострадавшим.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2004 |
|
RU2281026C2 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ СТРОИТЕЛЬНЫХ ГРУЗОВ | 2003 |
|
RU2243592C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2003 |
|
RU2242920C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2003 |
|
RU2242921C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 2005 |
|
RU2305044C2 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2005 |
|
RU2290059C2 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| СПОСОБ РЕГИСТРАЦИИ АРТЕРИАЛЬНОГО ДАВЛЕНИЯ И ЧАСТОТЫ ДЫХАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2345704C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2007 |
|
RU2342901C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2262457C1 |

Предлагаемая система относится к области медицинской техники, а именно к средствам и системам дистанционного контроля за передвижением машин скорой помощи, и может быть использована в городских учреждениях практического здравоохранения. Технической задачей изобретения является повышение оперативности дистанционного контроля с диспетчерского пункта за текущим географическим положением и состоянием парка машин скорой помощи, а также повышение надежности и достоверности обмена дискретными и аналоговыми сообщениями между диспетчерами, водителями и бригадами машин скорой помощи и врачами больниц, госпиталей и поликлиник. Система содержит спутники навигационной системы "Навстар", ретранслятор с приемопередающей антенной, установленный в центральной части города, диспетчерский пункт, машины скорой помощи, стационарную аппаратуру, установленную на профильных медицинских учреждениях. Диспетчерский пункт содержит приемную антенну, приемопередающую антенну, приемник GPS-сигналов, радиостанцию, блок сопряжения, ЭВМ, дисплей и устройство документации. Бортовой комплекс каждой машины скорой помощи содержит приемную антенну, приемопередающую антенну, приемник GPS-сигналов, радиостанцию, блок сопряжения, микропроцессор, датчики дополнительной информации, дисплей. Стационарная аппаратура профильных медицинских учреждений содержит приемопередающую антенну, радиостанцию, блок сопряжения и микропроцессор. Раскрыто выполнение приемника GPS-сигналов и радиостанции. 7 ил.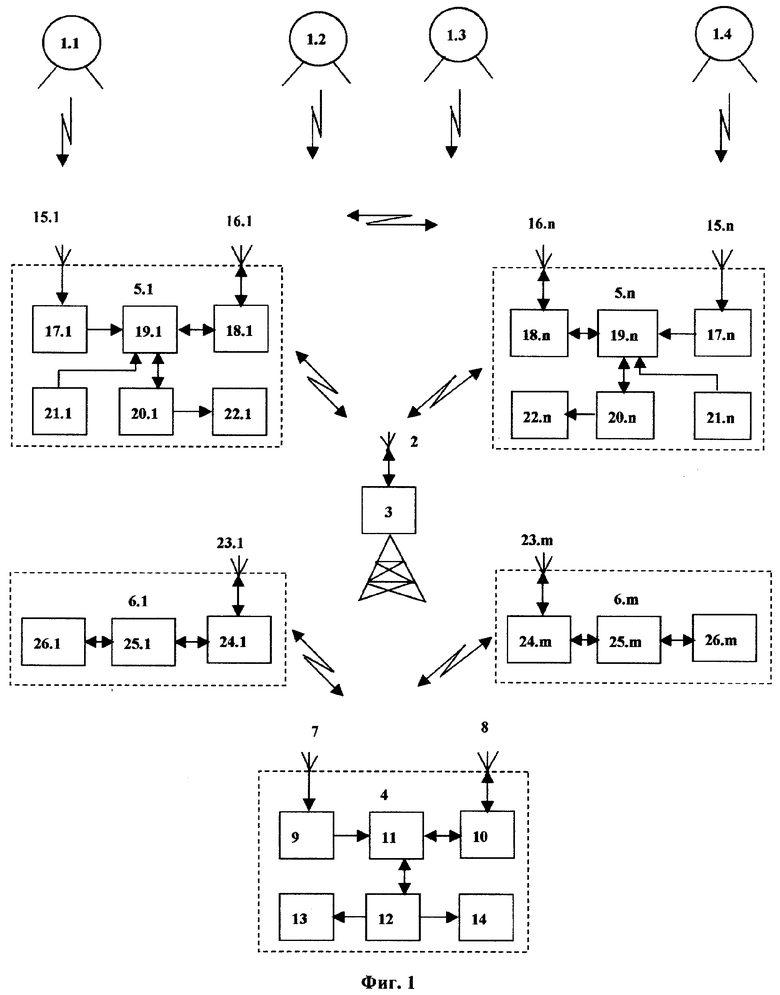
Система местоопределения и диспетчеризации мобильных бригад скорой помощи, содержащая спутники навигационной системы "Навстар", бортовой комплекс, установленный на машине скорой помощи и содержащий последовательно включенные приемную антенну, приемник GPS-сигналов, блок сопряжения, первый вход-выход которого через радиостанцию соединен с приемопередающей антенной, а второй вход-выход - с микропроцессором, предназначенным для выполнения навигационных расчетов, ретранслятор с приемопередающей антенной, установленный в центральной части города, и стационарную аппаратуру, установленную на диспетчерском пункте с известными координатами, полученными в результате прецизионной геодезической съемки, и состоящую из последовательно включенных приемной антенны, приемника GPS-сигналов, блока сопряжения, первый вход-выход которого через радиостанцию соединен с приемопередающей антенной, а второй вход-выход соединен через персональную ЭВМ с дисплеем и устройством документации, отличающаяся тем, что она снабжена дисплеем, установленным на машине скорой помощи и подключенным к микропроцессору, предназначенному для выполнения навигационных расчетов, радиостанцией, установленной на профильном медицинском учреждении, первый вход-выход которой соединен с приемопередающей антенной, причем каждый приемник GPS-сигналов состоит из последовательно подключенных к приемной антенне усилителя высокой частоты, смесителя, второй вход которого соединен с выходом гетеродина, усилителя промежуточной частоты, первого перемножителя, второй вход которого соединен с выходом фильтра нижних частот, узкополосного фильтра, второго перемножителя, второй вход которого соединен с выходом усилителя промежуточной частоты, и фильтра нижних частот, выход которого является выходом приемника, каждая радиостанция использует сложные сигналы с комбинированной фазовой манипуляцией и амплитудной модуляцией, которые излучаются на одной частоте WI, а принимаются на другой частоте WII, и состоит из последовательно включенных задающего генератора, вход управления которого через блок сопряжения соединен с микропроцессором, предназначенным для синхронизации работы источников аналоговых и дискретных сообщений, фазового манипулятора, второй вход которого соединен с выходом источника дискретных сообщений, амплитудного модулятора, второй вход которого соединен с выходом источника аналоговых сообщений, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, антенного переключателя, вход-выход которого соединен с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, амплитудного ограничителя и синхронного детектора, второй вход которого соединен с выходом усилителя второй промежуточной частоты, а выход подключен к микропроцессору, предназначенному для синхронизации работы источников аналоговых и дискретных сообщений, к выходу амплитудного ограничителя последовательно подключены перемножитель, второй вход которого соединен с выходом второго гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к микропроцессору, предназначенному для синхронизации работы источников аналоговых и дискретных сообщений, входы управления источников дискретных и аналоговых сообщений через блок сопряжения подключены к микропроцессору, предназначенному для синхронизации работы источников аналоговых и дискретных сообщений.
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 1999 |
|
RU2157565C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2000 |
|
RU2172524C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2001 |
|
RU2177647C1 |
| US 5504482 A, 02.04.1996 | |||
| Аппарат для обжига в кипящем слое преимущественно углесодержащего материала | 1987 |
|
SU1418557A1 |

