Область техники, к которой относится изобретение
Настоящее изобретение относится к датчику аварии и к способу обработки по меньшей мере одного измерительного сигнала с признаками, охарактеризованными в независимых пунктах формулы изобретения.
Уровень техники
Из публикации DE 10237162 А1 известен сенсорный элемент, выдающий измеренное значение, которое усиливается и преобразуется в цифровую форму. Это измеренное значение подвергают предварительной обработке.
Раскрытие изобретения
Предлагаемые в изобретении датчик аварии и способ обработки по меньшей мере одного измерительного сигнала, охарактеризованные в соответствующих независимых пунктах формулы изобретения, имеют то преимущество, что перезаписываемое запоминающее устройство, предпочтительно электрически-стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), подвергают проверке (тестированию) и в зависимости от результатов проверки принимают решение, из какого запоминающего устройства загружать данные для воздействия на обработку по меньшее мере одного измеренного значения. Это позволяет в случае сбоя перезаписываемого запоминающего устройства обращаться к записанным нестираемым образом данным, что, хотя и ведет к снижению точности измеренных значений, но все же обеспечивает основную функциональность таких критических датчиков, как датчик аварии. Это значительно повышает работоспособность, например систем безопасности водителя и пассажиров.
В качестве перезаписываемого запоминающего устройства можно помимо ЭСППЗУ использовать и другие типы памяти, а именно другие полупроводниковые запоминающие устройства, которые служат, например, в качестве оперативной памяти в компьютере. Нестираемым запоминающим устройством является, например, постоянное запоминающее устройство (ПЗУ), т.е. память только для чтения.
Логический модуль, как переключательный элемент, управляющий всем в датчике аварии, предпочтительно предусмотрен в виде интегральной схемы, т.е. специализированной интегральной схемы (сокр. ASIC от англ. "Application Specific Integrated Circuit"). Этот логический модуль может содержать также несколько интегральных схем или переключательных схем или только дискретные элементы. Логический модуль в альтернативном варианте может присутствовать также в виде процессора.
Первые данные из перезаписываемого запоминающего устройства как настроечная информация служат для того, чтобы с их помощью повысить точность и чувствительность датчика. Собственно настройка выполнена при изготовлении датчика. Поэтому перезаписываемое запоминающее устройство обращается к данным этой настройки. Можно использовать также адаптации, полученные в ходе эксплуатации датчика аварии.
Меры и усовершенствования, описанные в зависимых пунктах формулы изобретения, представляют собой предпочтительные улучшения конструкции датчика аварии и способа, описанных в соответствующих независимых пунктах формулы изобретения.
Особенно предпочтительно выполнять проверку посредством контрольной суммы. В данном случае для контроля настроечной информации в ЭСППЗУ используется метод контрольных сумм CRC (циклического контроля избыточности).
При сохранении в памяти и передаче данных, представленных двоичным кодом, отдельные биты могут быть искажены помехами. Чтобы обнаружить подобные ошибки, данные дополняются контрольными битами. Путем добавления более чем одного контрольного бита можно значительно повысить частоту обнаружения ошибок. Метод контрольных сумм CRC представляет собой метод генерирования этих контрольных битов. Контрольная сумма CRC (циклического контроля избыточности) основывается на том, что битовую строку (т.е. последовательности 0 и 1) интерпретируют как многочлен с коэффициентами 0 и 1. Следовательно, при числе k битов имеем k членов от х∧(k-1) до х∧0.
Пример:
110001->х5+х4+х0.
Теперь для расчета контрольной суммы CRC передатчик и приемник должны определить порождающий многочлен (он должен иметь определенные свойства, см. ниже). Пусть этот порождающий многочлен содержит m битов. Идея контрольной суммы CRC состоит в дополнении заданного блока информационных битов m битами таким образом, чтобы многочлен из информационных битов и контрольной суммы делился на порождающий многочлен.
В данном случае ЭСППЗУ содержит 32 бита. 24 бита используются для настроечной информации, остальные 8 битов - это так называемые биты FCS (последовательности контроля кадра), которые сохраняют результат деления многочлена используемых настроечных данных (рассчитывается при изготовлении датчика и записывается в ЭСППЗУ).
Выбор многочлена осуществляется таким образом, чтобы получить максимальное расстояние Хэмминга (HD). Величина HD указывает минимально требующееся число битовых обращений для контролируемых данных, при котором ошибка не обнаруживается.
В одном примере исполнения датчика выбирают 8-битовый многочлен, дающий HD=4, т.е. все комбинации 1-, 2-, 3-битовых ошибок могут быть обнаружены.
Реализуемый способ включает в себя три этапа или операции.
1. Загрузку данных: 24 бита настроечных данных дополняются 8 битами (=0).
2. Запуск деления полинома: реализуется аппаратными средствами в виде сдвигового регистра.
3. Сравнение данных: результат деления полинома по п.2 сравнивают с битами FCS (контроля последовательности кадра) из памяти ЭСППЗУ. При равенстве соответствующий бит циклического контроля избыточности (CRC) в SPI-передаче равен 0, при расхождении бит контроля = 1 может быть соответствующим образом проанализирован системой.
Полная последовательность 1-3 выполняется каждые 17 мкс.
Предпочтительно первые или вторые данные используются для того, чтобы воздействовать на усиление по меньшей мере одного измерительного сигнала и на опорное напряжение, т.е. определять или задавать их. В зависимости от первых или вторых данных можно определить также другие параметры, например параметры фильтра. Определение коэффициента усиления в конечном счете обеспечивает нужную точность, например 5%, тогда как записанное нестираемым образом значение для усиления гарантирует точность только 9%.
Далее предпочтительно использовать в начальной фазе быстрое регулирование смещения, чтобы устранить смещение самого сенсорного элемента, так называемое необработанное смещение. В циклической фазе, т.е. собственно в рабочей фазе датчика, используется медленное регулирование смещения, которое служит для устранения дрейфа, вполне возможного в полупроводниковых элементах. Регулятор смещения - это простой контур регулирования, на быстродействие которого можно влиять известным образом. Это регулирование может быть реализовано программными и/или аппаратными средствами. Начальной фазой является фаза включения датчика, тогда как циклическая фаза - это, как было отмечено выше, рабочая фаза датчика.
Предпочтительно датчик передает результат проверки через интерфейс. Это позволяет, например, информировать микроконтроллер в устройстве управления подушкой безопасности о состоянии датчика. Разумеется, наряду с результатом датчик аварии передает на микроконтроллер также собственные данные для дальнейшей обработки.
Если в циклической фазе возникает ошибка, это ведет к изменению уровня, которое можно интерпретировать как измерительный сигнал. Чтобы избежать этого, можно подавить такую ошибку, если датчик перестанет передавать измеренные значения или процессор перестанет принимать их. Возможно также переписывание этих измеренных значений в датчике, поэтому в течение заданного времени будут передаваться только продолжающиеся значения.
Краткое описание чертежей
Примеры осуществления изобретения поясняются в приведенном ниже описании со ссылкой на прилагаемые чертежи, где показаны:
на фиг.1 - блок-схема предлагаемого в изобретении датчика аварии,
на фиг.2 - схема прохождения сигнала,
на фиг.3 - логическая схема процесса,
на фиг.4 - первая временная диаграмма ускорения с инициализацией датчика без ошибки в ЭСППЗУ,
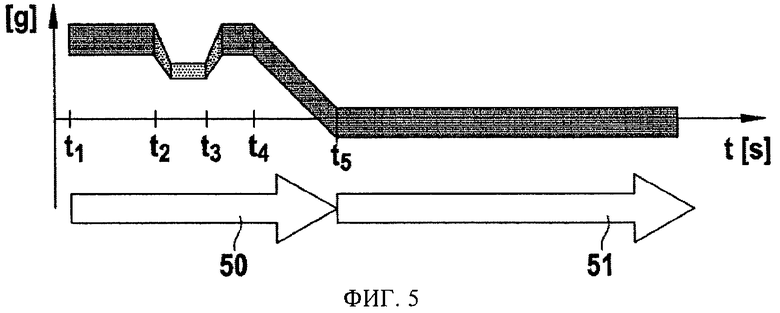
на фиг.5 - другая временная диаграмма ускорения с инициализацией датчика при наличии в ЭСППЗУ ошибки в начальной фазе,
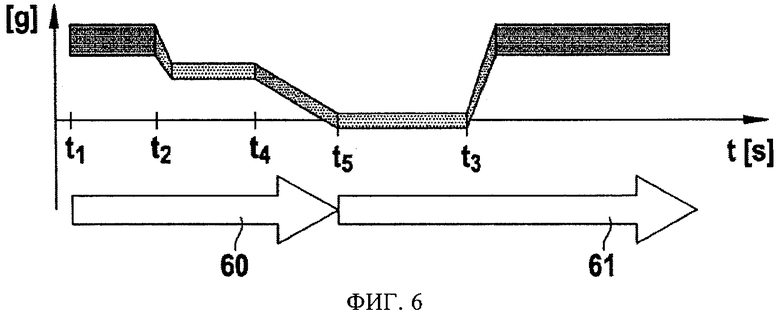
на фиг.6 - еще одна временная диаграмма ускорения с инициализацией датчика при наличии в ЭСППЗУ ошибки в циклической фазе,
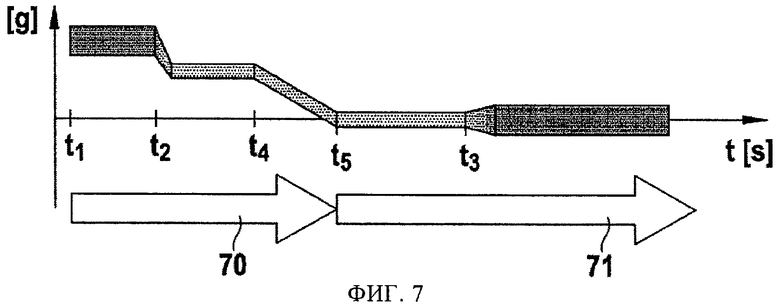
на фиг.7 - альтернативное решение с несогласованным опорным напряжением и инициализацией датчика при наличии в ЭСППЗУ ошибки в циклической фазе.
Осуществление изобретения
Датчик аварии измеряет физическую величину и передает ее на центральный процессор или регулятор. При этом основную точность датчиков можно путем настройки довести до требуемой точности отдельных параметров. В системах управления подушками безопасности центральные и периферийные датчики обычно настраиваются в отношении их чувствительности, чтобы этот параметр находился в требуемой области допусков. Чтобы постоянно сохранять настроечную информацию в датчике, в интегральной схеме датчика, т.е. в логическом модуле, используются различные виды памяти, например ZAP-диоды или ЭСППЗУ. Если ячейка памяти с настроечной информацией выйдет из строя, то это обычно в фазе инициализации или циклической фазе обнаруживается соответствующими механизмами контроля, в частности анализом контрольной суммы.
В соответствии с изобретением в зависимости от результатов проверки выбирают, использовать ли для воздействия на обработку по меньшей мере одной измеренной величины первые данные из перезаписываемого запоминающего устройства или вторые данные, записанные нестираемым образом во втором запоминающем устройстве. Таким образом, при сбое перезаписываемого запоминающего устройства можно обращаться к данным в нестираемом запоминающем устройстве, чтобы в дальнейшем обеспечить основную функциональность датчика и избежать выхода датчика из строя.
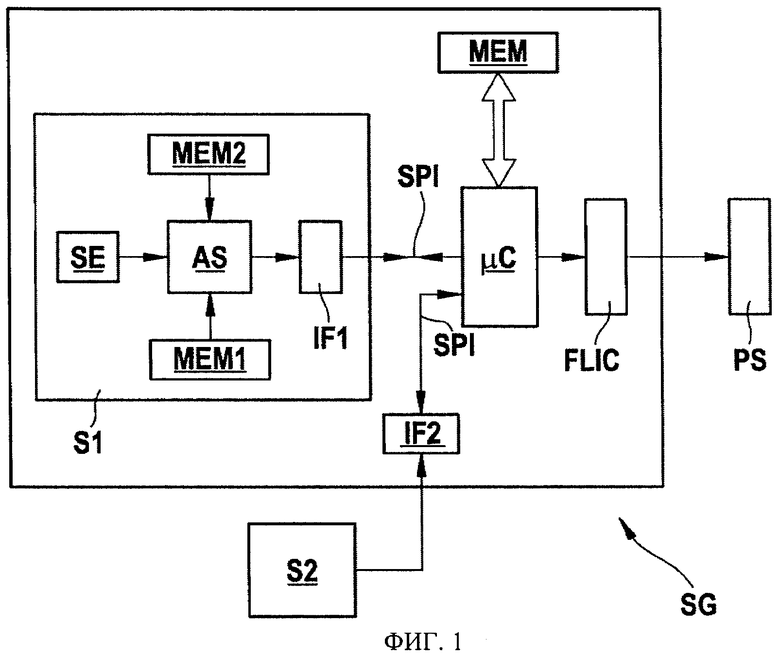
На фиг.1 показана блок-схема предлагаемого в изобретении датчика аварии в устройстве SG управления средствами защиты PS водителя и пассажиров, в частности подушками безопасности, ремнями безопасности, дугами безопасности кузова или средствами защиты пешеходов. Предлагаемый в изобретении датчик S1 аварии размещен в устройстве SG управления. Этот датчик S 1 содержит сенсорный (чувствительный) элемент SE, изготовленный микромеханическим способом и при ускорении автомобиля выдающий емкостный сигнал, который преобразуется в напряжение и затем усиливается. Это происходит в логическом модуле AS, имеющем несколько функций. В частности логический модуль AS, на который поступает сигнал сенсорного элемента SE, снабжен измерительным усилителем и другими функциями обработки сигнала. Логический модуль AS выполняет тестирование для проверки датчика S1. Если при этом обнаруживается ошибка в запоминающем устройстве МЕМ1, логический модуль AS для обработки по меньшей мере одного измеренного значения сенсорного элемента SE загружает данные из нестираемого запоминающего устройства МЕМ2. Если же при проверке контрольной суммы запоминающего устройства МЕМ1, выполненного как ЭСППЗУ, ошибка не обнаруживается, то данные для обработки измеренного значения загружаются из запоминающего устройства МЕМ1, в котором содержится точная настроечная информация, а также информация о том, какое опорное напряжение следует устанавливать. Это позволяет достигать точности измерения значения ускорения 5%, тогда как при основной функциональности и данных из нестираемого запоминающего устройства МЕМ2 возможна точность только 9%. При этом воздействие оказывается по существу на измерительный усилитель. Усиленные таким путем и при необходимости отфильтрованные и преобразованные в цифровую форму сигналы через интерфейс IF1, в данном случае выполненный как интегральная схема, передаются из датчика S1 по каналу SPI на микроконтроллер µС в устройстве управления. Наряду с данными датчика предается также информация о том, какой функциональностью обладает датчик S1 в устройстве SG управления, т.е. составляет ли чувствительность 5% или 9%. Соответственно может реагировать микроконтроллер µС при установке своего алгоритма управления. В этот алгоритм входят данные датчика S1. Поскольку в данном случае датчик S1 является датчиком ускорения, сенсорный элемент SE может быть чувствительным в одной размерности, например в продольном направлении автомобиля, но вместо этого или дополнительно к этому также и по другим осям чувствительности. Микроконтроллер µС может по шине последовательного периферийного интерфейса SPI запрашивать также различные состояния. Сюда относится, например информация о том, какую функциональность и какое регулирование смещения следует использовать. Логический модуль AS имеет два регулятора смещения. Первый регулятор смещения используется в так называемой начальной фазе (фазе инициализации) или фазе включения или фазе запуска. Задача этого быстрого регулирования смещения состоит в том, чтобы устранять необработанное смещение сенсорного элемента. После окончания начальной фазы следует циклическая или рабочая фаза датчика, когда датчик S1 должен выдавать свои значения. Здесь используется медленное регулирование смещения, задачей которого является только устранение эффектов дрейфа, которые могут возникать в предлагаемом датчике S1. Причиной эффектов дрейфа в циклической фазе являются прежде всего изменения температуры системы. При медленном регулировании смещения в принципе каждую секунду сравнивается выходной сигнал датчика с нулевым состоянием. Если выходной сигнал превышает 0 LSB (наименьшего значащего бита), то вычитают 1 LSB, если выходной сигнал меньше 1 LSB, то добавляют 1 LSB. Регулирование смещения может быть аналоговым или цифровым.
Микроконтроллер µC, который можно заменить также любым другим типом процессора или прикладной переключательной схемой, через вход/выход данных соединен с запоминающим устройством MEM, из которого микроконтроллер µС загружает алгоритм управления и которое он использует в качестве оперативной памяти. В зависимости от значений датчика микроконтроллер µС определяет, следует ли генерировать сигнал управления. Однако для этого микроконтроллер µС использует также сигналы датчиков за пределами устройства SG управления. Посредством другого интерфейса IF2 подключен внешний датчик S2. При этом речь может идти о датчике ускорения, датчике корпусного шума или датчике давления. В соответствии с изобретением этот датчик служит датчиком аварии.
Если микроконтроллер µC передает сигнал управления на управляющую интегральную схему FLIC, эта управляющая интегральная схема FLIC обеспечивает управление средствами защиты водителя и пассажиров, в частности подушками безопасности, ремнями безопасности или дугами безопасности кузова.
Наряду с вышеназванными датчиками ускорения, давления или корпусного шума можно, разумеется, использовать также датчики частоты вращения или другие датчики аварии.
В соответствии с изобретением логический модуль AS проверяет запоминающее устройство МЕМ1, в данном случае выполненное в виде ЭСППЗУ. Для этого, как упоминалось выше, логический модуль AS использует метод контрольной суммы. Если при этом логический модуль AS обнаружит, что в ЭСППЗУ имеется ошибка, то логический модуль AS загружает данные для воздействия на анализ измеренных значений сенсорного элемента SE из запоминающего устройства МЕМ2, в котором данные записаны нестираемым образом. Если это происходит в рабочей фазе, то это может приводить к скачку сигнала, передаваемого как значение датчика на микроконтроллер µС. Можно предусмотреть, чтобы микроконтроллер µС учитывал это явление, и скачок сигнала не приводил к срабатыванию средств защиты водителя и пассажиров.
При возникновении ошибки в ЭСППЗУ в рабочей фазе (переход от начальной фазы к рабочей фазе задан командой ЕОР "окончание программирования", передаваемой всем абонентам последовательного периферийного интерфейса SPI в системе управления подушками безопасности) в сети передачи данных датчика по меньшей мере бит NRO (ненормальная работа) = 0, при отклонении бит NRO = 1, что указывает на ошибку, и в качестве ответной реакции системы данные не анализируются/отбрасываются. Дополнительно, если ошибка индицируется дольше, по истечении определенного времени (время определения ошибки NRO сейчас составляет 1 с) ошибка заносится в запоминающее устройство неисправностей устройства управления.
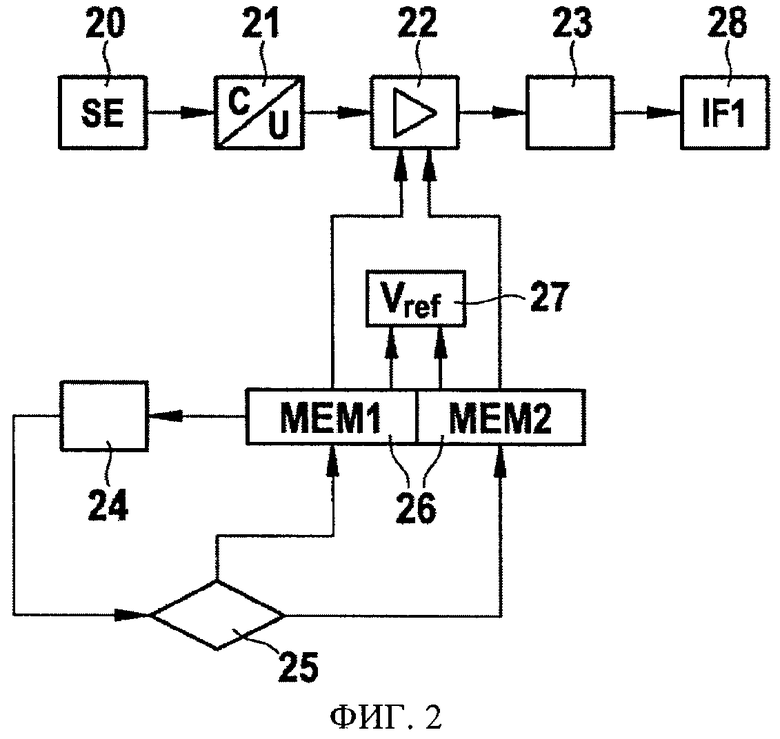
На фиг.2 блок-схема прохождения сигнала поясняет пример осуществления изобретения. Сенсорный элемент 20 подключен к преобразователю 21, который преобразует изменение электрической емкости, возникающее вследствие ускорения, в электрическое напряжение. Затем это напряжение усиливается усилителем 22. Перед и после усилителя 22 могут быть предусмотрены фильтры. На усилитель 22 в зависимости от данных воздействует запоминающее устройство МЕМ1 или МЕМ2. Это обозначено блоком 26. За усилителем 22 следует регулятор 23 смещения, который, как пояснялось выше, в начальной фазе представляет собой быстродействующий регулятор смещения, а в циклической фазе - медленный регулятор смещения. После регулирования смещения в блоке 28 эти данные через интерфейс IF1 передаются в микроконтроллер µC. При этом одновременно в датчике S1, в блоке 24 идет упомянутая выше проверка посредством контрольных сумм. В блоке 25 анализируется результат проверки. В зависимости от результата проверки в блоке 26 осуществляется управление запоминающим устройством, поэтому соответствующие данные загружаются из запоминающего устройства МЕМ1 или МЕМ2 для такого воздействия на усилитель 22, чтобы при бесперебойной работе данные загружались из запоминающего устройства МЕМ1 для достижения точности 5% или при возникновении ошибки данные загружались из запоминающего устройства МЕМ2 для достижения точности 9% основной функциональности. Дополнительно в зависимости от контрольного сигнала определяется опорное напряжение 27.
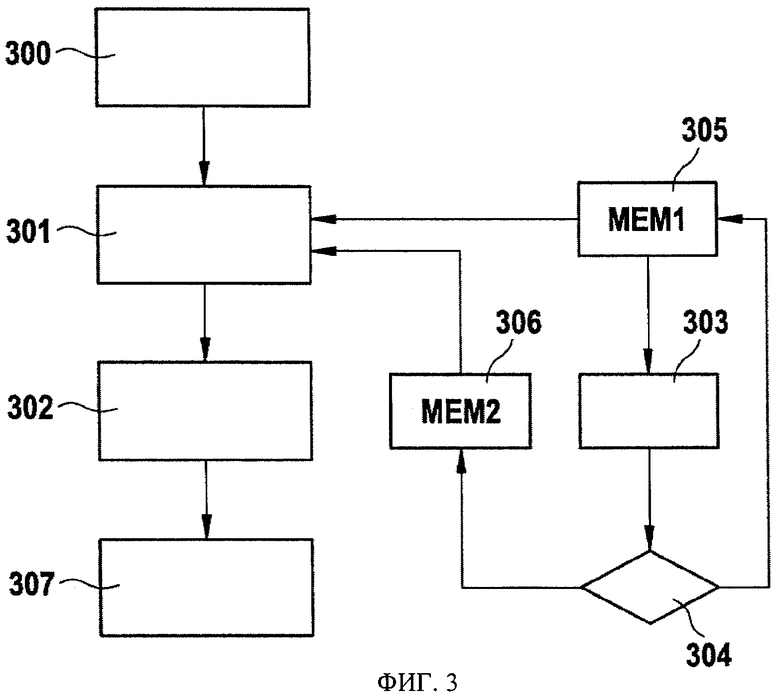
Логическая схема процесса на фиг.3 поясняет предлагаемый в изобретении способ. На шаге 300 сенсорный элемент SE регистрирует измеренное значение. Это измеренное значение, как описано выше, на шаге 301 преобразуется в напряжение, которое затем усиливается. Это напряжение определяется данными из запоминающего устройства M1 или М2. От этого зависит точность значения. На шаге 302 осуществляется быстрое регулирование смещения в начальной фазе или медленное регулирование смещения в циклической фазе. На шаге 303 осуществляется проверка запоминающего устройства МЕМ1, т.е. перезаписываемого запоминающего устройства, посредством контрольной суммы. Вместо проверки методом контрольной суммы можно использовать также другие пригодные здесь способы проверки. На шаге 304 проверяется, прошла ли проверка успешно или нет. Если проверка была успешной, то данные на шаге 305 загружаются из запоминающего устройства МЕМ1, чтобы соответствующим образом настроить усиление измеренных значений. Соответственно регулируется также опорное напряжение. Опорное напряжение служит для полного переключения. Если проверка не была успешной, то на шаге 306 осуществляется загрузка данных для воздействия на усилители и опорного напряжения из нестираемого запоминающего устройства МЕМ2. После регулирования смещения 302 осуществляется передача измеренных значений на шаге 307, причем одновременно передаются сигналы состояния как результат проверки.
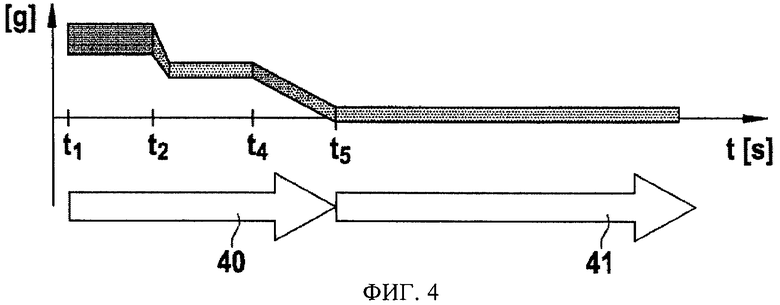
На фиг.4 показана первая временная диаграмма ускорения по данным датчика ускорения S1. В данном случае речь идет о характеристике сигнала при отсутствии ошибки в запоминающем устройстве МЕМ1. В начальной фазе 40 в момент времени t1 происходит включение питания и, следовательно, активизация датчика S1. Таким образом, до момента времени t2 имеет место определенное смещение, т.е. сигнал с точностью ±9%, которая здесь присуща сенсорному элементу. В момент времени t2 из запоминающего устройства МЕМ1, т.е. из ЭСППЗУ, считываются настроечные данные. Далее между моментами времени t2 и t4 осуществляется проверка запоминающего устройства МЕМ1. Настроечные данные вызывают скачок сигнала, а именно отрицательный скачок и установление повышенной точности ±5%, что показано серым цветом на схеме. В момент времени t4 активизируется быстрое регулирование смещения, приводящее к тому, что выходной сигнал устанавливается на 0. В момент времени t5 эта начальная фаза заканчивается, и быстрое регулирование смещения выключается. Затем с момента времени t5 осуществляется медленное регулирование смещения, чтобы исключить эффект дрейфа. Циклическая фаза имеет здесь условное обозначение 41.
На фиг.5 показана инициализация датчика при выявлении ошибки в запоминающем устройстве МЕМ1 в начальной фазе. Одинаковые отрезки времени здесь имеют те же обозначения, что и на фиг.4. Ив этом случае в момент времени t1 включается питание, а в момент времени t2 осуществляется загрузка настроечных данных из запоминающего устройства МЕМ1. Таким образом, и в этом случае происходит скачок сигнала, и устанавливается повышенная чувствительность. Однако в момент времени t3 проводимой проверки обнаруживается ошибка в запоминающем устройстве МЕМ1. В результате происходит скачок точности и сигнала, так как в этом случае настроечные данные загружаются из запоминающего устройства МЕМ2. Следовательно, происходит возврат к основной функциональности датчика S1. В момент времени t4 снова активизируется быстрое регулирование смещения, сопровождающееся снижением до минимума ошибки сигнала, причем в циклической фазе 51 сохраняется точность ±9%.
На фиг.6 показана инициализация датчика при выявлении ошибки в запоминающем устройстве МЕМ1 в циклической фазе 61. В начальной фазе 60 датчик до момента времени t5 работает так же, как на фиг.4. Однако в циклической фазе 61 в момент времени t3 снова обнаруживается ошибка. Поэтому в результате загрузки данных для основной функциональности снова происходит скачок сигнала и ухудшение точности до ±9%. Об этом необходимо сообщать контроллеру µC, чтобы он в своем алгоритме управления учитывал измененные сигналы.
Наконец, на фиг.7 показана та же характеристика, что и на фиг.6, с той лишь разницей, что теперь используется несогласованное опорное напряжение, которое благодаря технологическим улучшениям обладает большей точностью. Следовательно, происходит не смещение уровня, а только ухудшение точности до ±9%. Здесь начальная фаза имеет условное обозначение 70, а циклическая фаза - условное обозначение 71.
Точность 5% и 9% указана здесь только в качестве примера; в зависимости от применяемых датчиков можно использовать и другую точность.
Группа изобретений относится к технике защиты водителя и пассажиров транспортных средств от увечья в случае аварии. Предложены датчик аварии и способ обработки измеренного значения датчика аварии. Сенсорный элемент регистрирует по меньшей мере одну измеренную величину. Предусмотрено первое перезаписываемое запоминающее устройство, в котором хранятся первые данные для воздействия на обработку измеренной величины. Кроме того, предусмотрено второе запоминающее устройство, в котором нестираемым образом записаны вторые данные для воздействия на обработку измеренной величины. Имеется логический модуль, который в зависимости от результата проверки первого запоминающего устройства загружает первые или вторые данные для обработки измеренной величины. Группа изобретений обеспечивает основную функциональность такого критического датчика, как датчик аварии. Это повышает работоспособность систем безопасности водителя и пассажиров. 2 н. и 8 з.п. ф-лы, 7 ил.
1. Датчик (S1) аварии, включающий в себя:
- сенсорный элемент (SE) для регистрации по меньшей мере одной измеряемой величины;
- первое запоминающее устройство (МЕМ1), которое выполнено перезаписываемым и в котором хранятся первые данные для воздействия на обработку указанной по меньшей мере одной измеряемой величины;
- второе запоминающее устройство (МЕМ2), в котором нестираемым образом записаны вторые данные для воздействия на обработку по меньшей мере одной измеряемой величины;
- логический модуль, который в зависимости от результатов проверки первого запоминающего устройства (МЕМ1) загружает первые или вторые данные для обработки по меньшей мере одной измеряемой величины.
2. Датчик аварии по п.1, отличающийся тем, что логический модуль (AS) сконфигурирован с возможностью выполнения проверки посредством контрольной суммы.
3. Датчик аварии по п.1, отличающийся тем, что логическая схема (AS) в зависимости от первых или вторых данных влияет на усиление по меньшей мере одной измеряемой величины и по меньшей мере одного опорного напряжения.
4. Датчик аварии по п.1, отличающийся тем, что он имеет быстродействующий регулятор смещения для устранения смещения сенсорного элемента (SE) и медленный регулятор смещения для устранения дрейфа, причем логический модуль (AS) сконфигурирован таким образом, чтобы в начальной фазе (40, 50, 60, 70) использовать быстродействующий регулятор смещения, а в циклической фазе (41, 51, 61, 71) - медленный регулятор смещения.
5. Датчик аварии по п.1, отличающийся тем, что он имеет интерфейс (IF1), через который датчик (S1) аварии передает результат проверки.
6. Способ обработки по меньшей мере одной измеренной величины датчика аварии, включающий в себя следующие операции:
- регистрацию по меньшей мере одной измеренной величины;
- проверку первого запоминающего устройства (МЕМ1), выполненного перезаписываемым;
- загрузку первых или вторых данных в зависимости от результата проверки, причем первые данные хранятся в первом запоминающем устройстве, а вторые данные записаны нестираемым образом во втором запоминающем устройстве;
- воздействие на обработку сигнала первыми или вторыми данными.
7. Способ по п.6, отличающийся тем, что проверку осуществляют посредством контрольной суммы.
8. Способ по п.6 или 7, отличающийся тем, что в зависимости от первых или вторых данных воздействуют на усиление по меньшей мере одной измеренной величины и по меньшей мере на одно опорное напряжение.
9. Способ по п.6, отличающийся тем, что передачу по меньшей мере одной обработанной измеренной величины подавляют на заданное время в случае, если в циклической фазе проверка покажет ошибку.
10. Способ по п.6, отличающийся тем, что в начальной фазе (40, 50, 60, 70) используют быстрое регулирование смещения для устранения смещения сенсорного элемента (SE), а в циклической фазе - медленное регулирование смещения для устранения дрейфа.
| DE 10237162 A1, 26.02.2004 | |||
| DE 3133304 A1, 03.03.1983 | |||
| DE 10148029 A1, 24.04.2003 | |||
| RU 2004112211 A, 27.10.2005. |

