Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления двухконтурными газотурбинными двигателями (ТРДДФ) с форсажной камерой сгорания (ФКС).
Известен способ управления ТРДФ, заключающийся в том, что по измеренному давлению воздуха за компрессором управляют расходом топлива в ФКС (форсажным топливом), Черкасов Б.А. «Автоматика и регулирование ВРД», М., Машиностроение, 1965 г., с.74.
Недостатком известного способа является то, что он не обеспечивает сохранение неизменным режима работы основного контура: влияние подачи форсажного топлива на перепад давлений газа на турбине двигателя не контролируется, что может привести к значительному отклонению температуры газов перед турбиной от расчетного значения. Это снижает надежность работы двигателя и приводит к ускоренной выработке его ресурса.
Наиболее близким к данному изобретению по технической сущности является способ управления ТРДДФ, заключающийся в том, что по измеренным температуре воздуха на входе в двигатель, давлению воздуха за компрессором, положению рычага управления двигателем (РУД), и расходу топлива в основную камеру (ОКС) сгорания управляют расходом топлива в форсажную камеру сгорания (ФКС), по измеренным положению РУД и перепаду давлений газа на турбине двигателя управляют гидроцилиндрами привода створок реактивного сопла (PC), Шляхтенко С.М. «Теория ВРД», М., Машиностроение, 1975 г., с.303-305.
Недостатком этого способа является следующее.
При так называемом параметрическом отказе датчика положения створок PC (параметрический отказ - это отказ, при котором показания датчика произвольно меняются внутри рабочего диапазона измерения. Существующий контроль обмоток датчика и линий связи на обрыв и короткое замыкание этот отказ не обнаруживает) может случиться следующее.
1. На форсажном режиме неуправляемое изменение положения створок PC (а, значит, и площади критического сечения PC) может привести:
- к срыву пламени в ФКС,
- раскрутке ротора вентилятора двигателя из-за неуправляемого роста перепада давления газа на турбине вентилятора и, как следствие, к необходимости ручного выключения ФКС.
На режимах взлета самолета (ЛА) и на режимах боевого применения ЛА это является недопустимым, т.к. приводит к снижению надежности работы силовой установки (СУ) и безопасности ЛА.
2. На бесфорсажном режиме неуправляемое изменение положения створок PC может привести:
- к ухудшению экономичности двигателя,
- к критическому уменьшению запасов газодинамической устойчивости (ГДУ) вентилятора.
Это снижает надежность работы СУ и безопасность ЛА.
Целью изобретения является повышение качества работы САУ и, как следствие, повышение надежности работы двигателя и безопасности ЛА.
Поставленная цель достигается тем, что в способе управления ТРДДФ, заключающемся в том, что по измеренным температуре воздуха на входе в двигатель, давлению воздуха за компрессором, положению РУД, и расходу топлива в ОКС управляют расходом топлива в ФКС, по измеренным положению РУД и перепаду давлений газа на турбине двигателя формируют заданное положения створок PC, сравнивают его с измеренным и по полученной ошибке регулирования управляют гидроцилиндрами привода створок PC, дополнительно в зависимости от параметров двигателя и воздушного потока на входе в двигатель формируют расчетное значение положения створок PC, корректируют его в зависимости от индивидуальных характеристик двигателя, сравнивают корректированное расчетное значение положения створок PC с измеренным, если рассогласование между корректированным расчетным и измеренным положениями створок PC больше наперед заданной величины, определяемой расчетно-экспериментальным путем, формируют сигнал «Отказ датчика положения створок РС» и продолжают управлять гидроцилиндрами привода створок PC по величине рассогласования между заданным положением створок РС и корректированным расчетным.
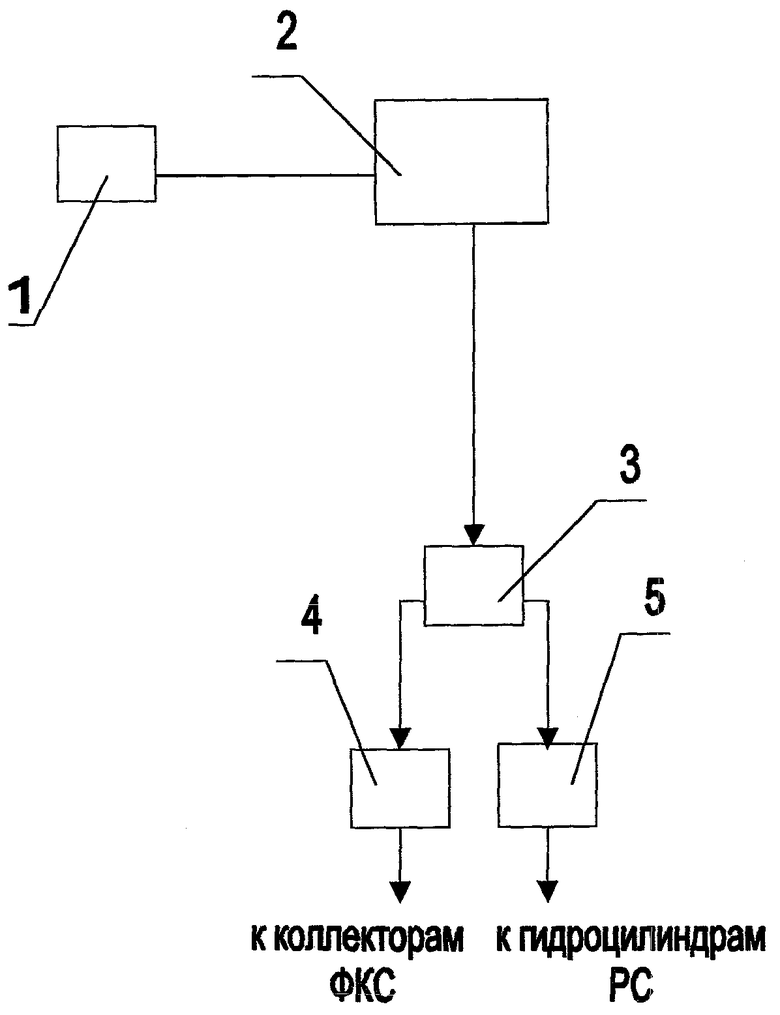
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные блок 1 датчиков (БД), электронный регулятор 2 (ЭР), блок 3 электрогидропреобразователей, дозатор 4 форсажного топлива, к выходу блока 3 подключен исполнительный механизм 5 (ИМ) управления гидроцилиндрами привода створок PC (не показаны).
Устройство работает следующим образом.
По измеренным с помощью БД 1 температуре воздуха на входе в двигатель, давлению воздуха за компрессором двигателя, положению РУД, и расходу топлива в ОКС ЭР 2 формирует заданное значение расхода топлива в ФКС:

где Gт ф зад. - заданный расход топлива в ФКС,
α руд - угол установки РУД,
Твх - температура воздуха на входе в двигатель,
Рк - давление воздуха за компрессором двигателя,
Gт окc - измеренный расход топлива в ОКС.
Примеры зависимости (1) приведены в книге Шляхтенко С.М. «Теория ВРД», М., «Машиностроение», 1975 г., с.307-308.
По измеренным с помощью БД 1 положению РУД, давлению воздуха за компрессором двигателя, давлению газа за турбиной двигателя ЭР 2 формирует заданное значение положения створок PC:

где Fс зад. - заданное положение створок PC,
α руд - угол установки РУД,
Рк - давление воздуха за компрессором двигателя,
Рт - давление газа за турбиной двигателя.
Примеры зависимости (2) приведены в книге Шляхтенко С.М. «Теория ВРД», М., «Машиностроение», 1975 г., с.199-202.
В зависимости от величины рассогласования между заданным и измеренным с помощью БД 1 расходом форсажного топлива и положением створок PC (по ошибке регулирования) ЭР 2 формирует электрические управляющие воздействия, поступающие в блок 3, где они преобразуются в гидравлические управляющие воздействия на дозатор 4 и ИМ 6.
Дополнительно в ЭР 2 осуществляется контроль показаний датчика положения створок PC. Делается это следующим образом.
По показаниям датчиков из БД 1 формируют расчетное значение положения створок PC:

где Fс расч. - расчетное положение створок PC,
Gт окc - измеренный расход топлива в ОКС,
Gт ф - измеренный расход топлива в ФКС,
Рт - измеренное давление газа за турбиной двигателя,
Рк - измеренное давление воздуха за компрессором двигателя,
Твх - измеренная температура воздуха на входе в двигатель,
nв - измеренная частота вращения ротора вентилятора двигателя.
Примеры зависимости (3) приведены в книге Попов К.Н., Соколов В.Д., Хвостов Н.И. «Сопла ВРД с отклоняемым вектором тяги», М., Машиностроение, 1979 г., с.23, 67-71.
Далее расчетное значение положения створок PC корректируется в зависимости от индивидуальных характеристик двигателя:

где Fс расч. корр. - корректированное расчетное положение створок PC,
Fс расч. - расчетное положение створок PC,
К корр. - коэффициент коррекции расчетного положения створок PC.
Коэффициент коррекции расчетного положения створок PC К корр. определяется расчетно-экспериментальным путем в ходе приемо-сдаточных испытаний (ПСИ) двигателя на моторном стенде и летных испытаний (ЛИ) самолета в процессе его сдачи заказчику.
Определяется он следующим образом:

где К корр. - коэффициент коррекции расчетного положения створок PC.
К корр.i - коэффициент коррекции расчетного положения створок PC, вычисленный после очередного контрольного замера:

где Fc изм.i - измеренное положение створок PC,
Fс расч.i - расчетное положение створок PC,
i - номер расчета Ккорр.i в ходе ПСИ и ЛИ. В зависимости от сложности механической части PC и законов управления положением створок PC i может изменяться от 100 (обычное сверхзвуковое PC) до 1000 (PC с изменяемым вектором тяги).
Далее корректированное расчетное значение положения створок PC сравнивается с измеренным:

где Δ Fc - рассогласование между расчетным и измеренным положением створок PC;
Fс расч. корр. - корректированное расчетное положение створок PC,
Fc изм. - измеренное положение створок PC.
Если величина Δ Fc больше наперед заданной величины (допуска на рассогласование), определяемой расчетно-экспериментальным путем, формируют сигнал «Отказ датчика положения створок РС».
В зависимости от сложности механической части PC и законов управления положением створок PC допуск может изменяться от 3% до 5% от полного диапазона изменения величины Fc изм.
ЭР 2 продолжает управлять гидроцилиндрами привода створок PC по величине рассогласования между заданным положением створок PC и корректированным расчетным.
Таким образом, за счет повышения качества работы САУ обеспечивается повышение полноты контроля датчика положения створок PC и, как следствие, повышение надежности работы двигателя и безопасности ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2009 |
|
RU2432478C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2009 |
|
RU2435969C2 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ФОРСАЖНУЮ КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2438031C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2008 |
|
RU2387857C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2008 |
|
RU2386837C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2018 |
|
RU2705500C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2018 |
|
RU2706518C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2008 |
|
RU2389890C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями с форсажной камерой сгорания (ТРДФ). Дополнительно в зависимости от параметров двигателя и воздушного потока на входе в двигатель формируют расчетное значение положения створок PC, корректируют его в зависимости от индивидуальных характеристик двигателя, сравнивают корректированное расчетное значение положения створок PC с измеренным, если рассогласование между корректированным расчетным и измеренным положениями створок PC больше наперед заданной величины, определяемой расчетно-экспериментальным путем, формируют сигнал «Отказ датчика положения створок РС» и продолжают управлять гидроцилиндрами привода створок PC по величине рассогласования между заданным положением створок PC и корректированным расчетным. Технический результат изобретения - повышение качества работы САУ и, как следствие, повышение надежности работы двигателя и безопасности ЛА. 1 ил.
Способ управления газотурбинным двигателем с форсажной камерой сгорания (ФКС), заключающийся в том, что по измеренным температуре воздуха на входе в двигатель, давлению воздуха за компрессором, положению рычага управления двигателем (РУД) и расходу топлива в основную камеру сгорания (ОКС) управляют расходом топлива в ФКС, по измеренным положению РУД и перепаду давлений газа на турбине двигателя формируют заданное положение створок реактивного сопла (PC), сравнивают его с измеренным и по полученной ошибке регулирования управляют гидроцилиндрами привода створок PC, отличающийся тем, что дополнительно в зависимости от параметров двигателя и воздушного потока на входе в двигатель формируют расчетное значение положения створок PC, корректируют его в зависимости от индивидуальных характеристик двигателя, сравнивают корректированное расчетное значение положения створок PC с измеренным, если рассогласование между корректированным расчетным и измеренным положениями створок PC больше наперед заданной величины, определяемой расчетно-экспериментальным путем, формируют сигнал «Отказ датчика положения створок РС» и продолжают управлять гидроцилиндрами привода створок PC по величине рассогласования между заданным положением створок PC и корректированным расчетным.
| СИСТЕМА УПРАВЛЕНИЯ СТВОРКАМИ РЕАКТИВНОГО СОПЛА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2289713C2 |
| RU 2063532 C1, 10.07.1996 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТВОРКАМИ РЕАКТИВНОГО СОПЛА И ПОДАЧЕЙ ТОПЛИВА В ФОРСАЖНУЮ КАМЕРУ ДВИГАТЕЛЯ СВЕРХЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1971 |
|
SU378074A1 |
| SU 646633 A1, 10.02.1996 | |||
| US 6142416 A, 07.11.2000 | |||
| СПОСОБ ПОДБОРА ПОВЕРХНОСТИ СКОЛЬЖЕНИЯ СПОРТИВНОГО ИНВЕНТАРЯ | 2000 |
|
RU2176538C1 |

