Область техники, к которой относится изобретение
Настоящее изобретение относится к наклонно-направленному бурению испытательной скважины. Более точно, изобретение относится к управлению направлением скважины, разбуриваемой долотом вращательного бурения, путем периодического изменения частоты вращения бурового долота во время вращения бурильной колонны, с которой оперативно соединено буровое долото.
Предпосылки создания изобретения
Для бурения нефтяных скважин со сложными траекториями и множеством направлений необходимо точное определение траектории испытательной скважины и гибкость для постоянного обеспечения управления траекторией. Предпочтительно управлять направлением или траекторией скважины в ходе буровых работ. Дополнительно предпочтительно быстро управлять траекторией во время буровых работ на любой глубине и при любом направлении в процессе бурения скважины.
Наклонно-направленное бурение осложнено необходимостью использовать устройство управления буровым долотом в суровых скважинных условиях. Устройство управления обычно расположено вблизи бурового долота на нижнем или "скважинном" конце бурильной колонны. Для обеспечения желаемого управления направлением в реальном времени работой устройства управления предпочтительно управляют в дистанционном режиме с поверхности земли. Кроме того, для обеспечения желаемой траектории и направления бурения устройство управления должно работать при нахождении по возможности на большой глубине внутри скважины и одновременно поддерживать практически осуществимые скорости бурения. Наконец, устройство управления должно надежно работать в исключительных условиях температуры, давления и вибрации, которые могут возникать во время буровых работ.
Из уровня техники известны устройства управления направлением бурения многих типов, имеющие двигатель, помещающийся в корпусе, ось которого отклонена от оси бурильной колонны. Двигателем может являться двигатель разнообразных типов, включая электродвигатель или гидравлический двигатель. Гидротурбинные двигатели, приводимые в действие циркулирующим буровым раствором, известны как забойные турбинные двигатели. К валу двигателя прикреплено шарошечное долото, которое вращается под действием двигателя. Смещенный по оси корпус двигателя, обычно называемый кривым переводником, обеспечивает осевое отклонение, которое может использоваться для изменения траектории скважины. При вращении бурового долота вместе с двигателем и одновременном вращении бурового долота вместе с бурильной колонной обеспечивается траектория разбуриваемой скважины, параллельная оси бурильной колонны. При вращении бурового долота только вместе с двигателем траектория скважины отклоняется от оси бурильной колонны. Путем чередования этих двух способов вращения бурового долота можно управлять траекторией скважины. Более подробное описание наклонно-направленного бурения с использованием идеи кривого переводника приведено в патентах US 3713500, 3841420 и 4492276, которые в порядке ссылки включены в настоящее описание.
Из уровня техники известны способы и устройства для корректирования угла или "кривизны" кривого переводника, с помощью которых задают угол отклонения скважины в зависимости от этого угла. Из уровня техники также известны устройства и способы борьбы с нежелательным крутящим моментом, возникающим при управлении направлением, включая использование сцеплений, управляющих относительным вращением долота для выбора необходимого азимутального положения долота внутри ствола скважины. В основу известных из уровня техники систем управления с использованием вариантов идеи кривого переводника обычно положено приложение комплексных толкающих или направляющих усилий и применение соответствующего оборудования для направления траектории скважины путем оказания на долото высокого давления перпендикулярно траектории скважины при одновременном вращении бурильной колонны. Эти усилия часто обеспечиваются с использованием гидравлических систем, которые являются дорогостоящими и создают дополнительный эксплуатационный риск в упомянутых раньше суровых условиях бурения. Кроме того, для создания этих перпендикулярно направленных усилий обычно требуется, чтобы устройство управления было изготовлено из механически прочных компонентов, что дополнительно повышает первоначальные и эксплуатационные затраты на устройство управления.
Краткое изложение сущности изобретения
В настоящем изобретении предложены устройства и способы управления направлением скважины, разбуриваемой за счет режущего эффекта долота вращательного бурения, расположенного на нижнем или "скважинном" конце бурильной колонны. Во время вращения бурильной колонны периодически изменяют частоту вращения долота, в результате чего с азимутального свода стенки скважины срезается непропорционально большее количество породы, что приводит к азимутальному отклонению направления скважины.
Устройство управления, расположенное на скважинном конце бурильной колонны, представляет собой двигатель, расположенный на кривом переводнике. Долото вращательного бурения прикреплено к валу двигателя. Вращение буровому долоту сообщается как двигателем, так и вращательным действием бурильной колонны.
Как указано выше, система управления сконструирована такими образом, что буровое долото непропорционально срезает породу со стенки скважины внутри предварительно заданного азимутального свода, направляя продвижение скважины по заданной траектории. В описанных примерах изобретения частоту вращения долота периодически замедляют внутри этого предварительно заданного свода, чтобы срезать непропорционально малое количество породы со стенки скважины. В результате долото перемещается к противоположной стороне скважины и срезает непропорционально большее количество породы со стенки скважины. Затем скважина обычно отклоняется и проходит в азимутальном направлении, в котором со стенки скважины было снято непропорционально большое количество породы.
Съем породы со стенки скважины и тем самым управление траекторией скважины осуществляют путем периодического изменения частоты вращения бурового долота во время вращения бурильной колонны. В системе управления используются два элемента для вращения бурового долота. Первым элементом, используемым для вращения бурового долота, является вращающаяся бурильная колонна. Вторым элементом, используемым для вращения бурового долота, является двигатель, расположенный внутри кривого переводника и оперативно соединенный с буровым долотом. Конечная частота вращения бурового долота представляет собой сумму частот вращения, обеспечиваемых бурильной колонной и двигателем.
Предпочтительно, чтобы как бурильная колонна, так и двигатель вращались одновременно. Если желательной является постоянная траектория скважины, во время вращения бурильной колонны поддерживают постоянную частоту вращения как бурильной колонны, так и двигателя. В процессе вращения долота в скважине со стенки скважины снимается в азимутальном направлении преимущественно одинаковое количество породы. Если желательной является наклонная траектория скважины, периодически изменяют частоту вращения бурового долота по мере его прохождения через предварительно заданный азимутальный участок стенки скважины. Это периодическое изменение частоты вращения бурового долота может осуществляться путем периодического изменения частоты вращения двигателя или путем периодического изменения частоты вращения бурильной колонны. Оба способа позволяют снимать непропорционально малые количества породы с одной стороны скважины и непропорционально большие количества породы с противоположной стороны скважины. Скважина отклоняется в направлении непропорционально большого количества снятой породы. Оба способа подробно рассмотрены далее в последующих разделах настоящего описания.
Краткое описание чертежей
Кратко перечисленные выше признаки и преимущества могут быть подробно поняты из вариантов осуществления, проиллюстрированных на приложенных чертежах.
На фиг.1 проиллюстрирована расположенная в испытательной скважине компоновка низа бурильной колонны с кривым переводником и двигателем на бурильной колонне, оперативно соединенной с роторной буровой установкой,
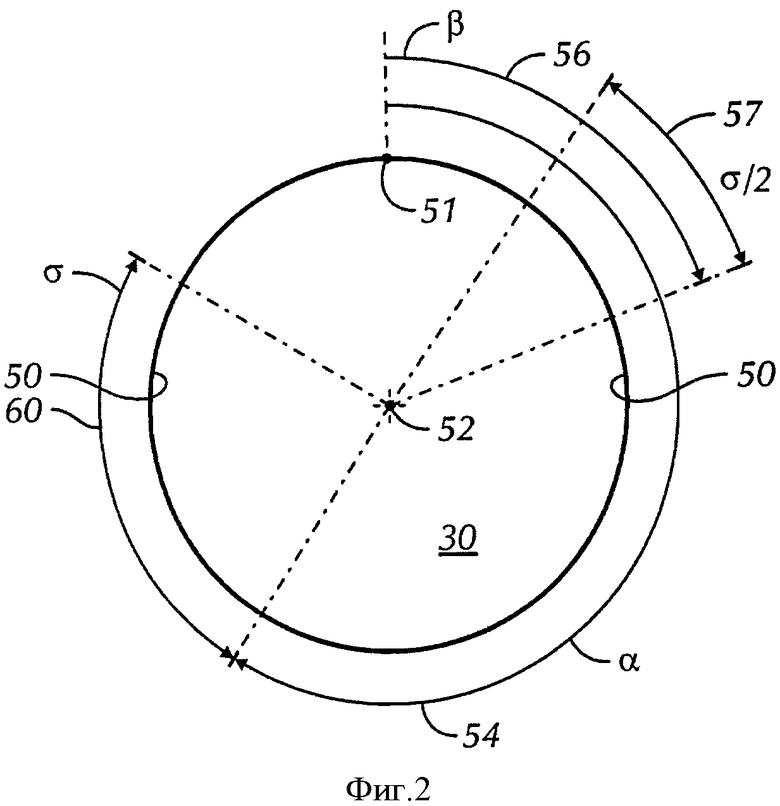
на фиг.2 показано поперечное сечение цилиндрической скважины для определения некоторых параметров, используемых в способе управления согласно изобретению,
на фиг.3 показано поперечное сечение скважины, при бурении которой изменяют частоту вращения бурового долота, чтобы снимать непропорционально малое количество породы с одной стороны скважины и непропорционально большое количество породы с противоположной стороны скважины,
на фиг.4а показана кривая зависимости постоянной частоты вращения бурильной колонны и множества циклов поворота,
на фиг.4б показана кривая зависимости периодического уменьшения частоты вращения двигателя и множества оборотов бурильной колонны,
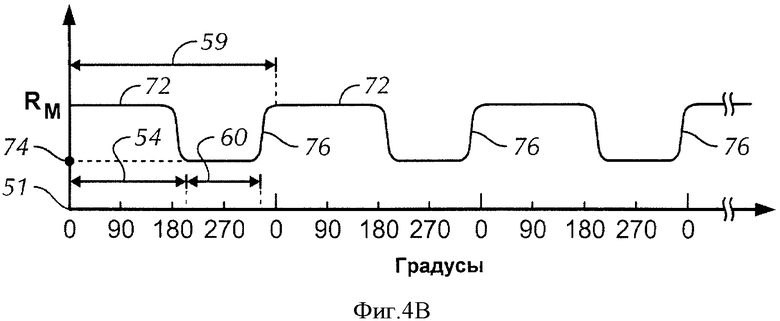
на фиг.4в показана кривая зависимости периодического уменьшения и периодического увеличения частоты вращения двигателя и множества циклов поворота бурильной колонны,
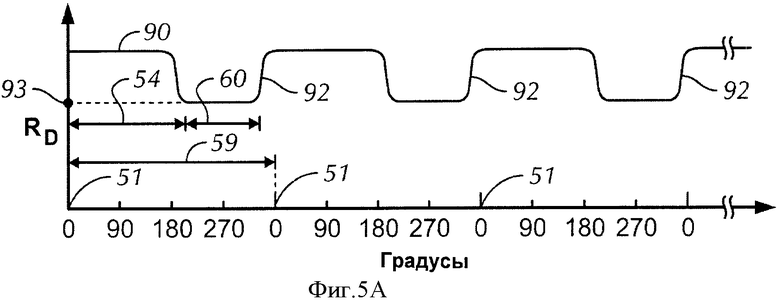
на фиг.5а показана кривая зависимости периодического уменьшения частоты вращения бурильной колонны и множества оборотов бурильной колонны и
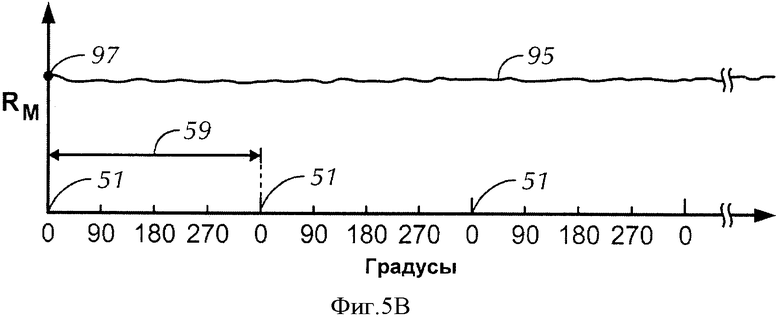
на фиг.5б показана кривая зависимости постоянной частоты вращения двигателя и множества циклов поворота.
Подробное описание предпочтительных вариантов осуществления
В настоящем изобретении предложены устройства и способы управления направлением скважины, разбуриваемой за счет режущего эффекта долота вращательного бурения. Изобретение будет рассмотрено по частям. В первой части описана аппаратура. Во второй части подробно рассмотрены принципы действия изобретения. В третьей части подробно рассмотрены два варианта осуществления изобретения, которые обеспечивают желаемые результаты управления направлением скважины.
Наклонно-направленное бурение осуществляют путем периодического изменения частоты вращения бурового долота. С точки зрения настоящего описания термин "периодическое изменение" означает варьирование частоты вращения бурового долота в диапазоне множества 360-градусных поворотов или "циклов" поворота бурильной колонны при одинаковом азимутальном своде во время множества оборотов.
Аппаратура
Рассмотрим фиг.1, на которой проиллюстрирована компоновка 10 низа бурильной колонны (КНБК), подвешенная в скважине 30, ограниченной стенкой 50 и пробуренной в земной толще 36. Верхний конец КНБК 10 соответствующим соединителем 20 оперативно соединен с нижним концом бурильной трубы 35. Верхний конец бурильной трубы 35 оперативно соединен с роторной буровой установкой, которая хорошо известна из техники и концептуально обозначена позицией 38. Из скважины 30 на поверхность 44 земли выходит кондукторная обсадная колонна 32. Внутри КНБК 10 расположены элементы устройства управления. Двигатель 14 расположен внутри кривого переводника 16. Двигателем 14 может являться электродвигатель или двигатель типа Moyno или турбинного типа. Долото 18 вращательного бурения оперативно соединено с двигателем 14 валом 17 двигателя и вращается, как это концептуально проиллюстрировано стрелкой RB.
Как показано на фиг.1, КНБК 10 также содержит вспомогательный участок 22 датчиков, участок 24 энергоснабжения, участок 26 электронного оборудования и участок 28 скважинной телеметрии. Вспомогательный участок 22 датчиков содержит датчики направления, такие как магнитометры и инклинометры, которые могут использоваться для указания ориентации КНБК 10 внутри скважины 30. Эта информация в свою очередь используется при управлении направлением для определения прохождения траектории скважины. Вспомогательный участок 22 датчиков также может содержать другие датчики, используемые для измерений во время бурения (MWD, от английского - measurement-while-drilling) или для каротажа во время бурения (LWD, от английского - logging while drilling), включая без ограничения датчики, реагирующие на гамма-излучение, нейтронное излучение и электромагнитные поля. Участок 26 электронного оборудования содержит электронные схемы для обеспечения работы и управления другими элементами внутри КНБК 10. Участок 26 электронного оборудования предпочтительно содержит скважинную память (не показана) для хранения параметров наклонно-направленного бурения, результатов измерений, осуществленных на участке датчиков, и режимов наклонно-направленного бурения. Участок 26 электронного оборудования также предпочтительно содержит скважинный процессор для управления элементами, образующими КНБК 10, и для обработки различных результатов измерений и данных телеметрии. Элементы внутри КНБК 10 посредством участка 28 скважинной телеметрии связаны с поверхностью 44 земли. Участок 28 скважинной телеметрии обменивается данными с наземным участком телеметрии, установленным возле устья скважины (не показан), который предпочтительно размещается внутри наземного оборудования 42. Могут применяться системы скважинной телеметрии различных типов, включая телеметрические системы с гидроимпульсным каналом связи, сиренные системы контроля состояния и свойств бурового раствора, электромагнитные системы и акустические системы. Участок 24 энергоснабжения подает электроэнергию, необходимую для работы других элементов внутри КНБК 10. Источником энергии обычно являются батареи.
Как показано на фиг.1, буровой флюид или буровой раствор поступает с поверхности 44 вниз по бурильной колонне, содержащей бурильную трубу 35 и КНБК 10, выходит через буровое долото 18 и возвращается на поверхность через кольцевое пространство между стволом скважины и бурильной колонной. Циркуляция бурового раствора концептуально обозначена стрелками 12. Система подачи бурового раствора хорошо известна из техники и концептуально представлена позицией 40. Если двигателем 14 является турбинный или забойный турбинный двигатель, нисходящий поток бурового раствора посредством вала 17 сообщает вращение буровому долоту 18, как это обозначено стрелкой RM. Предполагается, что проиллюстрированный на фиг.1 двигатель 14 является забойным турбинным двигателем. При определении траектории разбуриваемой скважины 30 в системе управления применяется периодическое изменение частоты вращения бурового долота 18. В одном из вариантов осуществления изобретения частоту вращения бурового долота 18 периодически изменяют путем периодического изменения частоты вращения двигателя 14. Поскольку предполагается, что показанный на фиг.1 двигатель 14 является забойным турбинным двигателем, частоту вращения изменяют путем изменения потока бурового раствора через забойный турбинный двигатель. Это делается посредством элемента, ограничивающего поток флюида или пропускающего поток флюида, который может быть расположен внутри бурильной колонны (как это концептуально показано позицией 39) или на поверхности 44 внутри (не показано) системы 40 буровых насосов. Ограничивающий или пропускающий поток флюида элемент проиллюстрирован пунктирными линиями, поскольку он не нужен, если двигатель 14 является электродвигателем. Хотя для целей обсуждения рассматривается забойный турбинный двигатель, также может использоваться электродвигатель, что делает ненужным ограничивающий или пропускающий поток флюида элемент 39. Частотой вращения электродвигателя электрически управляют взаимодействующие участок 26 электронного оборудования и участок 24 энергоснабжения. Соединение участка 24 энергоснабжения и двигателя 14 показано пунктирной линией, поскольку оно не нужно, если двигатель является двигателем турбинного типа.
Как показано на фиг.1, путем вращения бурильной трубы 35 и КНБК 10 роторная буровая установка 38 вносит во вращение долота 18 вращательного бурения дополнительную составляющую вращения, концептуально обозначенную стрелкой RD. Частотой вращения бурильной колонны обычно управляют с поверхности с помощью наземного оборудования 42 на основании предварительно заданной информации о траектории или информации об ориентации КНБК, передаваемой телеметрическим путем датчиками вспомогательного участка 22 датчиков. Частотой вращения двигателя (концептуально обозначенной стрелкой RM) обычно управляют с помощью сигналов, передаваемых телеметрическим путем с поверхности, с использованием информации о положении и ориентации КНБК 10, получаемой на вспомогательном участке 22 и передаваемой телеметрическим путем на поверхность. В качестве альтернативы, частотой RM вращения двигателя можно управлять с использованием информации об ориентации, получаемой на вспомогательном участке датчиков, в сочетании с предварительно заданной управляющей информацией, хранящейся в скважинном процессоре на участке 26 электронного оборудования.
Основные принципы действия
Когда КНБК 10, показанная на фиг.1, вращается с постоянной частотой внутри скважины 30, она проходит по круговой траектории и бурит скважины, диаметр которой немного превышает диаметр бурового долота 18. Этот больший диаметр, ограниченный стенкой 50 скважины, возникает из-за угла, образованного осью бурильной трубы 35 и осью кривого переводника 16.
Как указано выше, во вращении бурового долота присутствуют две составляющие. Первая составляющая является результатом действия буровой установки 38, которая вращает всю бурильную колонну с частотой RD вращения. Вторая составляющая вращения является результатом действия двигателя 10, который вращает долото с частотой RM. Частота RB вращения бурового долота является суммой этих двух составляющих. В математическом выражении частота RB вращения долота равна

Как указано выше, если необходимо управление направлением, обе составляющие RD и RM, образующие конечную частоту вращения RB бурового долота, обычно рассматриваются по отдельности. В качестве примера известного уровня техники, если величина RD установлена на уровне ноля, двигатель 14 будет продолжать вращать буровое долото 18 с частотой RM вращения. Буровое долото будет увеличивать угол наклона скважины на постоянный азимутальный угол, заданный положением невращающегося кривого переводника 16, при этом бурильная колонна опускается в скважину позади продвигающегося бурового долота. В качестве альтернативы, если требуется бурение скважины с постоянной траекторией, инициируют вращение бурильной колонны с частотой RD в сочетании с вращением двигателя с частотой RM, при этом из-за вращения КНБК 10 азимутальный угол кривого переводника 16 уже не является постоянным, а буровое долото, вращающееся с частотой RB=RM+RD вращения, равномерно срезает породу со всех сторон скважины.
В процессе описанного выше периодического прохождения бурового долота вокруг стенки, когда RD и RM не равны нолю, буровое долото 18 срезает породу с различных по азимуту участков скважины в зависимости от длительности прохождения. Именно во время этого периодического прохождения бурового долота можно мгновенно и периодически менять величину RB во время каждого оборота КНБК 10, чтобы скорость съема породы с одной стороны скважины предпочтительно отличалась от скорости ее съема с противоположной стороны скважины. В результате также увеличивается угол наклона скважины при продолжающемся вращении бурильной колонны. С точки зрения эксплуатации выгодно продолжать вращение бурильной колонны, что рассмотрено в следующем разделе описания. Периодическое изменение величины RB за один оборот бурильной колонны можно осуществлять путем изменения величины RD или RM, что подробно описано в следующих разделах описания.
На фиг.2 показано поперечное сечение цилиндрической скважины 30 для определения некоторых параметров, используемых в способе управления. Центр скважины обозначен позицией 52, а относительный угол скважины или "нулевой" азимутальный угол обозначен позицией 51. В целях обсуждения предположим, что величины RD и RM не равны нолю, и при прохождении бурового долота внутри скважины частоту RB=RD+RM вращения долота снижают до величины RBd, начиная преимущественно с угла α изменения оборотов, обозначенного позицией 54, вплоть до угла σ "останова", обозначенного позицией 60. Азимутальное положение угла α изменения оборотов предпочтительно задано по отношению к углу 51 приведения. В этом случае частота вращения долота на протяжении остального цикла 360-градусного поворота восстанавливается преимущественно до величины RB. Мгновенный и периодический переход от RB к RBd можно обеспечить путем уменьшения RD или КЬ (или обеих величин), как это рассмотрено в последующих разделах описания. В результате этого уменьшения мощности разрушения породы на протяжении угла σ останова (обозначенного позицией 60) на стенке скважины остается избыток породы преимущественно при азимутальном угле σ останова. Естественно, что этот избыток породы заставляет буровое долото перемещаться по радиусу к противоположной стороне скважины на участок σ/2 азимутального свода, обозначенный позицией 57, который заканчивается при угле β, где

при этом угол β обозначен позицией 56. Частота вращения бурового долота на участке от свода σ/2 до угла β равна RB или превышает эту величину, которая, разумеется, превышает величину PBd. В результате со стенки скважины преимущественно внутри азимутального свода 57 снимается непропорционально большое количество породы, что приводит к отклонению скважины в этом азимутальном направлении.
Рассмотренные ранее результаты изменения частоты вращения бурового долота концептуально проиллюстрированы на фиг.3, на которой показано поперечное сечение скважины. Когда долото достигает положения, которое соответствует углу α, обозначенному позицией 54, частота вращения бурового долота снижается с RB до RBd. Буровое долото в этом азимутальном положении обозначено позицией 18а. Вследствие уменьшения частоты вращения долота на стенке скважины в положении 50а, которое соответствует углу σ останова, показанному на фиг.2, остается избыток породы. Затем частоту вращения бурового долота увеличивают до RB, и долото перемещается на противоположную сторону скважины 30, где расположен азимутальный свод 57, заканчивающийся при угле β. Буровое долото в этом положении концептуально обозначено позицией 18b. При вращении бурового долота с частотой RB или выше (вследствие отсутствия сопротивления движению через скважину) в положении 50b со стенки скважины снимается непропорционально большое количество породы. За счет периодического уменьшения частоты вращения долота при угле α изменения оборотов во время вращения КНБК внутри скважины 30 продолжает нарастать угол наклона скважины в азимутальной области, ограниченной сводом 57 и углом β.
Подразумевается, что наклон скважины также может быть обеспечен путем периодического увеличения RB, в результате чего при угле периодического увеличения частоты вращения со стенки скважины срезается непропорциональное количество породы.
Методы периодического изменения частоты вращения долота
Уравнение (1) является математической иллюстрацией того, что частоту RB вращения бурового долота можно изменять путем изменения частоты RM вращения двигателя или частоты RD вращения бурильной колонны.
На фиг.4а, 4б и 4в наглядно проиллюстрирован метод периодического изменения RB путем периодического изменения RM и поддержания постоянной величины RD.
Кривой 70 на фиг.4а обозначена величина RD в зависимости от угла, на который повернута КНБК 10. Согласно рассмотренным выше и проиллюстрированным на фиг.2 и 3 примерам угол приведения или "нулевой" угол также обозначен позицией 51. Полный цикл 360-градусного поворота КНБК обозначен позицией 59, при этом проиллюстрированы три таких цикла. Таким образом, бурильная колонна вращается с постоянной частотой вращения RD, обозначенной позицией 53.
Кривой 72 на фиг.4б обозначена частота RM вращения бурового долота в зависимости от угла, на который повернута КНБК 10, при условии вращения бурильной колонны с постоянной частотой, обозначенной позицией 53. Как и на фиг.4а, угол приведения для цикла поворота бурильной колонны обозначен 51, при этом также проиллюстрированы три цикла. Согласно рассмотренным выше и проиллюстрированным на фиг.2 и 3 примерам величину RM периодически уменьшают, как это обозначено выбросами 76, до значения 74, начиная с угла 54 (который соответствует углу α изменения оборотов) на протяжении угла 60 останова (который соответствует величине σ угла останова). Это изменение RM периодически повторяют во время циклов поворота бурильной колонны.
Как указано выше, при снижении частоты вращения долота с одной стороны скважины буровое долото перемещается к противоположной стороне скважины, где частота вращения долота возвращается к нормальной или даже превышает ее. На фиг.4в представлена кривая, сходная с фиг.4б, но иллюстрирующая периодическое уменьшение и увеличение RM. И в этом случае выбросами 76 обозначено уменьшение RM до значения 74 при азимутальном угле 54 (соответствующем углу α). Кроме того, выбросами 78 обозначено увеличение RM до значения 80 в пределах азимутального свода 57, завершающегося при угле 56 (соответствующем углу β).
С учетом проиллюстрированных на фиг.4а, 4б и 4в кривых можно увидеть, что при поддержании постоянной величины RD и периодическом изменении RM периодически изменяется частота вращения или RB=RD+RM бурового долота, в результате чего происходит желаемое отклонение ствола скважины.
Периодическим изменением RM можно различными способами управлять в реальном времени во время бурения. Обратимся снова к фиг.1, а также фиг.4а, 4б и 4в. В этих способах управления в реальном времени обычно используется ориентация и положение КНБК 10, определяемое датчиками вспомогательного участка 22 датчиков. Первый способ состоит в том, что в скважинной памяти участка 26 электронного оборудования сохраняют множество величин изменения частоты вращения долота (в зависимости от α и σ). Затем с помощью переданного с поверхности телеметрического сигнала выбирают соответствующую последовательность, исходя из данных ориентации КНБК, переданных телеметрическим путем на поверхность, а также из известного проекта скважины. Соответствующую последовательность обычно задают с использованием наземного процессора, установленного внутри наземного оборудования 42. Этот способ сходен с идеей "справочной таблицы", используемой во множестве систем электронного оборудования. Второй способ состоит в том, что наземное оборудование 42 телеметрическим путем передает КНБК 10 значения α и σ, чтобы направить бурение согласно проекту. Значения α и σ также выбирают, исходя как из данных ориентации КНБК (полученных с помощью датчиков вспомогательного участка 22 датчиков), телеметрическим путем переданных на поверхность, так и объекта наклонно-направленного бурения. Переданные телеметрическим путем величины изменения частоты вращения и величины углов α и σ останова, соответственно, вводят в резидентную операционную программу скважинного процессора на участке 26 электронного оборудования. Затем выходные данные скважинного процессора используют для регулирования и периодического изменения частоты вращения двигателя с целью направления скважины 30 к желаемому разрабатываемому пласту. Если сформулировать вкратце, периодическое изменение частоты вращения упомянутого бурового долота осуществляется путем сочетания в скважинном процессоре показаний вспомогательных датчиков и информации о повороте, переданной телеметрическим путем с поверхности земли.
Подразумевается, что для осуществления периодических изменений RM могут применяться другие методы, включая без ограничения использование предварительно запрограммированных команд изменения, хранящихся в скважинной памяти участка 26 электронного оборудования, в сочетании с данными ориентации КНБК, которые получают с помощью датчиков вспомогательного участка 22 датчиков. Для осуществления этого способа не требуется телеметрическая связь в реальном времени с наземным оборудованием 42.
Частоту RB вращения долота также можно изменять путем изменения частоты RD вращения бурильной колонны. Рассмотрим фиг.5а и 5б. Кривой 95 на фиг.5б обозначен двигатель 14, вращающийся с постоянной частотой RM 97 в зависимости от угла, на который повернута КНБК 10. Как на фиг.4а, 4б и 4в, угол приведения для цикла поворота бурильной колонны обозначен 51, при этом также проиллюстрированы три цикла 59 поворота бурильной колонны. На фиг.5а проиллюстрирована периодически изменяемая частота RD вращения бурильной колонны. Согласно рассмотренному ранее примеру первую частоту RD вращения периодически уменьшают, как это обозначено выбросами 92, до второй частоты 93 вращения, начиная с угла 54 изменения оборотов (который соответствует углу α) на протяжении угла 60 останова (который соответствует углу σ). Это изменение RD в пределах от первой до второй частот вращения периодически повторяют во время циклов поворота бурильной колонны.
С учетом проиллюстрированных на фиг.5а и 5б кривых можно увидеть, что при поддержании постоянной величины RM и периодическом изменении RD периодически изменяется частота вращения или RB=RD+RM бурового долота, в результате чего происходит желаемое отклонение ствола скважины.
Периодическим изменением RB обычно управляют на поверхности с использованием наземного оборудования 42 (в которое введены значения α σ) во взаимодействии с ротором (не показан) буровой установки 38.
Подразумевается, что скорость, с которой нарастает угол наклона ствола скважины, зависит от ряда факторов, включающих величину, на которую увеличивается или уменьшается частота вращения бурового долота при ее периодическом изменении. При заданном изменении частоты вращения бурового долота величина RB может изменяться при периодическом чередовании циклов поворота бурильной колонны, как, например, при каждом втором, каждом третьем, каждом четвертом повороте и т.д. Также подразумевается, что RB можно изменять путем периодического и синхронного изменения как RD, так и RM с использованием описанных выше методов.
В одном из альтернативных вариантов осуществления изобретения используются две телеметрические системы. Первая система отвечает за управление периодическим изменением частоты RB вращения бурового долота. Вторая телеметрическая система отвечает за передачу телеметрическим путем показаний датчиков, расположенных на вспомогательном участке 22 датчиков КНБК 10.
Резюме
В настоящем изобретении предложены устройства и способы управления направлением скважины, разбуриваемой за счет режущего эффекта долота вращательного бурения. Управление осуществляют путем периодического изменения, на протяжении 360-градусного цикла поворота бурильной колонны частоты вращения бурового долота, в результате чего в пределах предварительно заданных азимутальных сводов со стенки скважины предпочтительно срезаются различные количества породы. Скважина отклоняется в азимутальном направлении, в котором со стенки скважины было срезано пропорционально большее количество породы. Вращение бурового долота осуществляют путем одновременного вращения бурового двигателя и бурильной колонны. В изобретении требуется приложение небольших, если вообще требуется, усилий, перпендикулярных оси скважины. Вместо этого отклонение достигается за счет изменения частоты вращения долота, чтобы предпочтительно снимать породу со стенки скважины при одновременно продолжающемся вращении бурильной колонны. За счет этого можно достигать объектов траектории скважины с использованием меньших усилий, менее дорогостоящих материалов, которые требуются в других таких способах и соответствующих устройствах. Кроме того, в изобретении не требуется использовать гидравлическую технику, взаимодействующую со стенкой скважины, чтобы продвигать элементы бурильной колонны в желаемом направлении отклонения. За счет непрерывного вращения бурильной колонны во время бурения как прямой, так и наклонной скважины обеспечивается более эффективное рассеяние тепла и более высокий крутящий момент на буровом долоте.
Изложенное выше описание следует считать иллюстрирующим, а не ограничивающим изобретение, которое ограничено только следующей далее формулой изобретения.



Изобретение относится к нефтегазовой промышленности, а именно к способу наклонно-направленного бурения скважин. Приводят во вращение долото при помощи двигателя, расположенного в кривом переводнике и бурильной колонны, независимо друг от друга. Производят периодическое изменение частоты вращения бурового долота на протяжении угла предпочтительного съема непропорционального количества породы внутри азимутального свода от первой частоты вращения до второй частоты вращения. При этом поддерживают вторую частоту вращения на протяжении этого угла, после чего возобновляют вращение долота с первой частотой. Частоту вращения долота изменяют путем изменения частоты вращения бурового двигателя или бурильной колонны. Позволяет поддерживать направление скважины с точной траекторией, а также обеспечивает гибкость управления траекторией скважины в процессе бурения на любой глубине и в любом направлении. 5 з.п. ф-лы, 8 ил.
1. Способ отклонения скважины, разбуриваемой вращающимся буровым долотом, в котором периодически изменяют частоту вращения упомянутого бурового долота с целью предпочтительного съема непропорционального количества породы внутри азимутального свода стенки упомянутой скважины, при угле изменения оборотов периодически изменяют упомянутую частоту вращения упомянутого бурового долота в пределах от первой частоты вращения до второй частоты вращения, поддерживают упомянутую вторую частоту вращения на протяжении угла останова и впоследствии возобновляют вращение с упомянутой первой частотой.
2. Способ по п.1, в котором дополнительно изменяют частоту вращения упомянутого бурового долота путем периодического изменения частоты вращения бурового двигателя, с которым оперативно соединено упомянутое буровое долото.
3. Способ по п.1, в котором дополнительно изменяют частоту вращения упомянутого бурового долота путем периодического изменения частоты вращения бурильной колонны, с которой оперативно соединено упомянутое буровое долото.
4. Способ по п.1, в котором упомянутое буровое долото оперативно соединено с буровым двигателем и бурильной колонной и при периодическом изменении частоты вращения упомянутого бурового долота одновременно вращаются упомянутый буровой двигатель и упомянутая бурильная колонна.
5. Способ по п.1, в котором дополнительно передают телеметрическим путем с поверхности земли упомянутый угол изменения оборотов и упомянутый угол останова скважинному процессору, взаимодействующему с упомянутым буровым двигателем, и тем самым периодически изменяют упомянутую частоту вращения упомянутого бурового долота путем управления упомянутой частотой вращения упомянутого бурового двигателя.
6. Способ по п.1, в котором дополнительно сохраняют упомянутый угол изменения оборотов и упомянутый угол останова в скважинной памяти и передают упомянутый угол изменения оборотов и упомянутый угол останова скважинному процессору, взаимодействующему с упомянутым буровым двигателем, и тем самым периодически изменяют упомянутую частоту вращения упомянутого бурового долота путем управления упомянутой частотой вращения упомянутого бурового двигателя.
| US 5133418 А, 28.07.1992 | |||
| Способ направленного бурения скважин и устройство для его осуществления | 1981 |
|
SU1059113A1 |
| Способ проводки наклонного ствола скважины забойным двигателем | 1987 |
|
SU1550071A1 |
| СПОСОБ БУРЕНИЯ НАКЛОННО НАПРАВЛЕННЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2114273C1 |
| ПОТОЧНАЯ ЛИНИЯ ПРОИЗВОДСТВА БУМАЖНЫХ ПАТРОНОВ | 0 |
|
SU171259A1 |

