ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области бурения нефтяных и газовых скважин, а именно к системе для автоматизированного управления работой буровыми установками.
УРОВЕНЬ ТЕХНИКИ
Известна система управления процессом бурения, раскрытая в RU 25534 U1, опубл. 10.10.2002. Система управления процессом бурения содержит забойный двигатель, насос для прокачки промывочной жидкости, забойную телеметрическую систему, наземные датчики контроля технологических параметров, блок передачи информации и управляющий компьютер с программным обеспечением и собственной базой данных. При этом управляющий компьютер дополнительно содержит базу данных системы автоматического проектирования (САПР) бурения конкретной скважины.
Недостатком раскрытого выше технического решения является то, что система оценивает и принимает решения на основании данных от забойной телеметрической системы с электромагнитным или гидравлическим каналом связи и только на основании датчиков: угла азимута, зенита, положение отклонителя и показатели каротажа, которые находятся на значительном удалении (примерно 14 м) от забоя скважины не позволяющие мгновенно оценить изменения и принимать решения системе о смене пластов и соответственно изменить режимы бурения для достижения эффективного бурения. В нашем случае датчики расположены на долоте или наддолотном переводнике на удалении от забоя (0,2…0,4 м) и оценка изменения происходит по следующим параметрам: нагрузка на долоте, частота вращения долота, крутящий момент на долоте, температура забоя, расход и давление промывочной жидкости, вибрации, азимутальный и зенитный угол, каротаж пород.
Кроме того, из уровня техники известна система автоматизированного управления бурением скважины, раскрытая в RU 2697988 С1, опубл. 21.08.2019 10.04.2015, прототип. Система автоматизированного управления бурением скважины, включающая модуль (1) сравнения и управления, а также датчики (9,11,12,14,15,16) технологических параметров и исполнительный механизм (3), связанные с модулем (1) сравнения и управления. При этом модуль (1) сравнения и управления содержит программируемый контроллер и пульт оператора, исполнительный механизм (3) связан с модулем (1) сравнения и управления через силовой модуль (2) и содержит сервопривод, установленный с возможностью воздействия на тормоз или вал барабана лебедки (8) буровой установки. Датчики технологических параметров включают датчик (9) расхода промывочной жидкости в нагнетательной линии, датчик (11) импульсов для определения скорости вращения барабана буровой лебедки, датчик (12) крутящего момента бурильного инструмента, датчик (14) веса бурильной колонны на крюке буровой установки, датчик (15) давления в нагнетательной линии и датчик (16) импульсов для определения частоты вращения ротора бурильного инструмента. При этом модуль (1) сравнения и управления выполнен с возможностью регистрации полученных с датчиков (9,11,12,14,15,16) технологических параметров, а также задания в контроллер следующих параметров работы буровой установки: дифференциального рабочего перепада давления в нагнетательной линии, дифференциального перепада давления при проработке ствола, максимально допустимого дифференциального рабочего давления, нижнего предела перепада дифференциального давления, допустимого диапазона изменения заданного рабочего дифференциального давления, номинального расхода промывочной жидкости, допустимого предела изменения расхода жидкости, максимально допустимого момента на роторе, максимального углубления долота за один оборот, максимально допустимой скорости подачи инструмента при проработке ствола, максимально допустимой нагрузки на долото, максимального и минимального углов поворота барабана лебедки, чувствительности лебедки, быстродействия привода вращения вала и количества израсходованной гидравлической энергии в предыдущем процессе. Причем модуль (1) сравнения и управления выполнен с возможностью подачи на сервопривод исполнительного механизма (3) сигналов на управление перемещением буровой лебедки (8) на основании регистрируемых и задаваемых параметров.
Недостатком раскрытого выше технического решения является то, что датчик (12) крутящего момента бурильного инструмента, датчик (14) веса бурильной колонны на крюке буровой установки, датчик (15) давления в нагнетательной линии и датчик (16) импульсов для определения частоты вращения ротора бурильного инструмента установлены на поверхности на буровой установке и показывают усредненное, с задержкой по времени и не объективные данные происходящие на забое скважины, также оценка и управляющее воздействие производиться по дифференциальному давлению, что также является косвенным, усредненным и с задержкой по времени параметром. В нашей системе оценка идет по прямым параметрам непосредственно на долоте или наддолотном переводнике – нагрузка на долоте, частота вращения долота, крутящий момент на долоте, температура забоя, расход и давление промывочной жидкости, вибрации, азимутальный и зенитный угол, каротаж пород.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленного изобретения является разработка эффективной системы для автоматизированного управления работой буровыми установками.
Техническим результатом изобретения является повышение срока службы бурового инструмента (долота, забойного двигателя и компоновки нижней части бурильной колонны (КНБК)) и эффективности управления процессом бурения.
Указанный технический результат достигается за счет того, что система
автоматизированного управления процессом бурения скважин содержит:
- вычислительный наземный центр, содержащий блок сравнения и управления, приемник сигналов технологических данных от бурового долота или наддолотного переводника, приемник сигналов технологических данных от поверхностного оборудования буровой установки, и монитор бурильщика;
- датчики технологических параметров, расположенные на долоте или наддолотном переводнике и выполненные с возможностью регистрации и передачи на приемник сигналов следующих технологических параметров: осевая нагрузка на долото, крутящий момент на долоте, координаты положения долота в скважине по углам азимута и зенита, температура и давление в скважине в призабойной зоне, вибрации и шоки в процессе бурения, расход промывочной жидкости, данные гамма каротажа и резистивиметрии;
- датчики технологических параметров от поверхностного оборудования буровой установки, при этом указанные датчики выполнены с возможностью регистрации и передачи на приемник сигналов следующих технологических параметров: давление на манифольде, расход на входе и выходе циркуляционной системы, плотность и температура промывочной жидкости на входе и выходе циркуляционной системы, скорость вращения барабана буровой лебедки, крутящий момент и частота вращения на роторе или верхнем силовом приводе (ВСП), вес бурового инструмента на крюке в статике в движении вверх-вниз, объемы промывочной жидкости в емкостях;
- исполнительный механизм ротора или ВСП, исполнительный механизм буровой лебедки, исполнительный механизм бурового насоса и исполнительный механизм дозаторов химических реагентов емкостей блока приготовления растворов (БПР);
– модуль управления исполнительными механизмами, связанный с блоком сравнения и управления и выполненный с возможностью передачи указанным исполнительным механизмам сигналов управления работой буровой лебедкой, ротором или ВСП, буровым насосом и дозаторами химических реагентов емкостей БПР.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
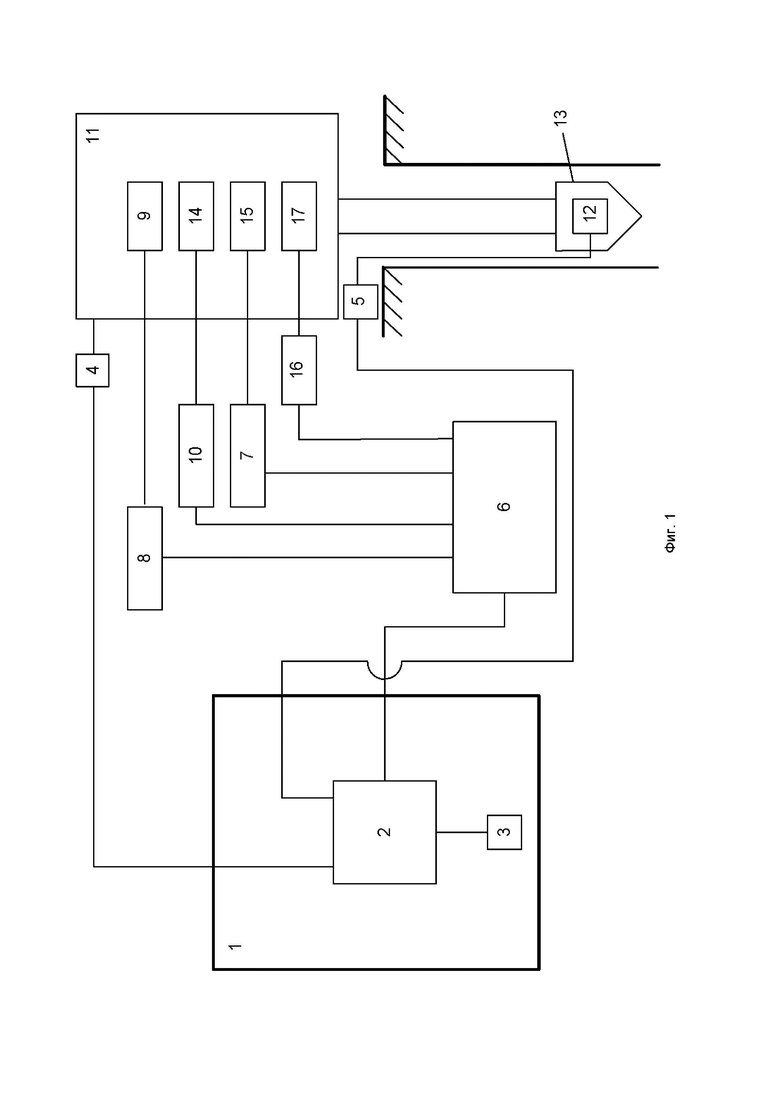
Фиг. 1 – Схема заявленной система автоматизированного управления процессом бурения скважин.
1 – вычислительный наземный центр; 2 – блок сравнения и управления; 4 – приемник сигналов технологических параметров от поверхностного оборудования буровой установки; 5 – приемник сигналов технологических параметров от бурового долота или наддолотного модуля; 6 – модуль управления; 7 – исполнительный механизм ротора или верхнего силового привода (ВСП); 8 – исполнительный механизм буровой лебедки; 9 – буровая лебедка; 10 – исполнительный механизм бурового насоса; 11 – датчики технологических параметров оборудования, расположенные на поверхностном оборудовании буровой установки; 12 – датчики технологических параметров, расположенные на долоте или на наддолотном переводнике; 13 – долото; 14 – буровой насос; 15 – ротор или ВСП, 16 – исполнительный механизм дозаторов химических реагентов емкостей БПР; 17 – емкости БПР.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Система автоматизированного управления процессом бурения скважин содержит: - вычислительный наземный центр (1), содержащий блок (2) сравнения и управления,
приемник (5) сигналов технологических параметров от бурового долота или наддолотного переводника, расположенный на устье скважины, приемник (4) сигналов технологических параметров от поверхностного оборудования буровой установки, расположенный на буровой установке, и монитор (3) бурильщика;
- датчики (12) технологических параметров, расположенные на долоте или наддолотном переводнике (13) и выполненные с возможностью регистрации и передачи на приемник (5) сигналов следующих технологических параметров: осевая нагрузка на долото, крутящий момента на долоте, координаты положения долота в скважине по углам азимута и зенита, температура и давление в скважине в призабойной зоне, вибрации и шоки в процессе бурения, расход промывочной жидкости, данные гамма каротажа и резистивиметрии;
- датчики (11) технологических параметров от поверхностного оборудования буровой установки, при этом указанные датчики (11) выполнены с возможностью регистрации и передачи на приемник (4) сигналов следующих технологических параметров: давление на манифольде, расход на входе и выходе циркуляционной системы, плотность промывочной жидкости на входе и выходе, температура промывочной жидкости на входе и выходе циркуляционной системы, объемы промывочной жидкости в ёмкостях, скорость вращения барабана буровой лебедки, крутящий момент и частота вращения на роторе или верхнем силовом приводе, вес бурового инструмента на крюке в статике в движении вверх-вниз;
- исполнительный механизм (7) ротора или ВСП, исполнительный механизм (8) буровой лебедки и исполнительный механизм (10) бурового насоса, исполнительный механизм (16) дозаторов химических реагентов емкостей БПР;
– модуль управления (6) исполнительными механизмами, выполненный с возможностью передачи указанным исполнительным механизмам сигналов управления работой буровой лебедкой (9), ротором или ВСП (15), буровым насосом (14) и дозаторами емкостей (17) БПР.
Датчики (11) технологических параметров включают:
- датчик давления промывочной жидкости, определяющий давление на манифольде (напорная линия насоса);
- расходомер, установленный на входе в циркуляционную систему и определяющий объемный расход промывочной жидкости на входе в циркуляционную систему;
- расходомер, установленный на выходе из циркуляционной системы и определяющий объемный расход промывочной жидкости на выходе из циркуляционной системы;
- датчик угловых скоростей вращения барабана буровой лебедки, определяющий скорость вращения барабана буровой лебедки;
– моментомер ротора или ВСП, определяющий крутящий момент на роторе или ВСП;
- датчик частоты вращения ротора или ВСП, определяющий частоту вращения ротора или ВСП;
- датчик веса, определяющий вес бурового инструмента на крюке в статике и в движении вверх-вниз;
- датчики плотности (ареометр) промывочной жидкости на выходе из скважины и блока очистки и в емкостях;
- датчики температура промывочной жидкости на входе в циркуляционную систему и выходе из циркуляционной системы.
Датчики (12) технологических параметров включают:
- тензодатчики, определяющие осевую нагрузку на долото и крутящий момент на долоте;
- акселерометры, определяющие координаты положения долота в скважине по углам азимута и зенита, а также вибрации и шоки в процессе бурения, частоту вращения долота;
- датчики температуры и давления, определяющие температуру и давление в скважине в призабойной зоне, соответственно;
- датчики расхода промывочной жидкости;
- датчики гамма каротажа и резистивиметрии, определяющие изменение пород и сопротивление пород, соответственно.
Заявленная система автоматизированного управления процессом бурения скважин работает следующим образом.
Оператор при помощи монитора (3) бурильщика загружает из базы данных, данные технологических параметров для работы бурового инструмента: технологические параметры для работы долота – номинальная и максимально допустимая осевая нагрузка на долото, номинальная и максимально допустимая частота вращения долота, номинальная и максимально допустимая частота вращения ротора или ВСП, номинальный и максимально допустимый крутящий момент на долоте, буримость пород по глубине (характеризуется скоростью бурения, изменением крутящего момента, частоты вращения), зависимости оптимальных частот вращения, осевых нагрузок, крутящих моментов долота от буримости пород, ресурс долота; технологические параметры для работы винтового забойного двигателя (ВЗД) – номинальный и максимально допустимый крутящего момент на ВЗД, номинальная и максимально допустимая мощность ВЗД (в зависимости от расхода), максимально допустимое дифференциальное давления при бурении, ресурс ВЗД и оптимальные взаимосвязи указанных технологических параметров между собой, а также плотность промывочной жидкости, температура промывочной жидкости на входе в циркуляционную систему и выходе из циркуляционной системы.
После ввода указанных технологических параметров запускается процесс бурения и датчики (11) технологических параметров от поверхностного оборудования буровой установки, и датчики (12) технологических параметров, расположенные на долоте или наддолотоном переводнике, заявленной системы автоматизированного управления процессом бурения скважин осуществляют фиксацию соответствующих технологических параметров.
Датчики (11) технологических параметров бурового оборудования, расположенные на поверхностном оборудовании буровой установки, фиксируют фактические технологические параметры (давление на манифольде, расход на входе и выходе из циркуляционной системы, плотность промывочной жидкости, температура промывочной жидкости на входе в циркуляционную систему и выходе из циркуляционной системы, скорость вращения барабана буровой лебедки (движение колонны), крутящий момент на роторе или ВСП и частота вращения ротора или ВСП, вес бурового инструмента на крюке в статике в движении вверх-вниз) по времени с определенной частотой дискретизации. Технологические параметры в виде аналоговых сигналов с датчиков (11) технологических параметров в онлайн режиме передаются (при помощи проводной или беспроводной связи) на приемник (4) сигналов технологических параметров от поверхностного оборудования буровой установки, вычислительного центра (1). Затем аналоговые сигналы технологических параметров с датчиков (11) поступают на усилитель, затем на аналого-цифровой преобразователь, где преобразуются в цифровой сигнал, а затем поступают в блок (2) сравнения и управления, при этом в блоке (2) на основании вращения барабана буровой лебедки рассчитывает скорость движения инструмента и глубину скважины.
Датчики (12) технологических параметров, расположенные на долоте или на наддолотном переводнике, на минимальном удалении от забоя фиксируют фактические технологические параметры (осевая нагрузка на долото, крутящий момент на долоте, координаты положения долота в скважине по углам азимута и зенита, температура и давление в скважине в призабойной зоне, расход промывочной жидкости через долото, вибрации и шоки, данные гамма каротажа и резистивеметрии) в процессе бурения с привязкой по глубине за счет данных от вращения лебедки и по времени с определенной частотой дискретизации. Технологические параметры в виде аналоговых сигналов с датчиков (12) технологических параметров в онлайн режиме передаются на поверхность по беспроводному каналу связи и фиксируются при помощи приемника (5) сигналов технологических параметров от бурового долота вычислительного центра (1). Затем аналоговые сигналы технологических параметров с датчиков (12) поступают на усилитель, затем на аналого-цифровой преобразователь, где преобразуются в цифровой сигнал, а затем поступают в блок (2) сравнения и управления.
В блоке (2) сравнения и управления цифровой сигнал технологических параметров с датчиков (12) привязываются к рассчитанной глубине скважины на основе измеренных лебедкой глубины спуска инструмента, после чего в блоке (2) осуществляется сравнение заданных технологических параметров для работы бурового инструмента: технологические параметры для работы долота – номинальная и максимально допустимая осевые нагрузки на долото, номинальная и максимально допустимая частоты вращения долота, номинальная и максимально допустимая частоты вращения ротора или ВСП, номинальный и максимально допустимый крутящие моменты на долоте, буримость пород, зависимости оптимальных частот вращения, осевых нагрузок, крутящих моментов долота от буримости пород, ресурс долота; технологические параметры для работы винтового забойного двигателя (ВЗД) – номинальный и максимально допустимый крутящие моменты на ВЗД, номинальная и максимально допустимая частоты вращения на ВЗД номинальная и максимально допустимая мощности ВЗД (в зависимости от расхода), максимально допустимое дифференциальное давления при бурении, ресурс ВЗД, а также плотность промывочной жидкости, температура промывочной жидкости на входе и выходе циркуляционной системы и оптимальные взаимосвязи указанных технологических параметров между собой с фактическим технологическими параметрами в режиме реального времени, переданных от долота, а именно номинальную и максимально допустимую осевые нагрузки на долото сравнивают с реальными данными по осевой нагрузке, номинальный и максимально допустимый крутящие моменты на долоте сравнивают с реальными данными по крутящему моменту на долоте, номинальную и максимально допустимую частоты вращения ротора или ВСП сравнивают с реальными данными по частоте вращения ротора или ВСП, номинальный и максимально допустимый крутящие моменты на ВЗД и номинальную и максимально допустимую мощность ВЗД сравнивают с реальными данными по крутящему моменту на ВЗД и по мощности ВЗД, которые определяются по крутящему моменту и частоте вращения на долоте, соответственно, заданную буримость пород сравнивают с реальными данными по буримости пород, рассчитанными на основе данных по гамма каротажу и резистивиметрии и фактическому изменению частоты вращения, крутящего момента и вибраций долота от осевой нагрузки. Также в блоке (2) осуществляют сравнение заданных плотности промывочной жидкости и температуры промывочной жидкости на входе в циркуляционную систему и на выходе из циркуляционной системы с реальными данными по плотности промывочной жидкости и температуре промывочной жидкости на входе в циркуляционную систему и на выходе из циркуляционной системы. Затем блок (2) сравнения и управления вычислительного наземного центра (1), при необходимости, корректирует фактические технологические параметры и передает модулю (6) управления команды по оптимальным режимам бурения, который в свою очередь передает команду исполнительным механизмам (7, 8, 10, 16) буровой лебедки (9), бурового насоса (14), ротора (15) или ВСП и дозаторов емкостей (17) БПР по корректировке скорости вращения барабана буровой лебедки (9), частоты вращения ротора (15) или ВСП, расхода промывочной жидкости бурового насоса (14), регулирующего мощность, частоту вращения и крутящий момент ВЗД, для обеспечения требуемого режима бурения (по механической скорости и стойкости долота, перехода пластов или др.) также с учетом измеренных:
- температуры в скважине в призабойной зоне – для контроля изменения температуры долота по глубине, что позволяет предупредить возможные перегревы долота и ВЗД и сохранить заданный ресурс долота и ВЗД, записать изменение температуры с глубиной для определения перехода пород;
- вибраций и шоков в процессе бурения для определения перехода между мягкими и твердыми пластами, либо переслаиваемых пластов, что позволяет сохранить заданный ресурс долота и ВЗД, и при необходимости изменить режим бурения для снижения вибраций;
- давления в скважине в призабойной зоне – для отслеживания изменения давления по глубине скважины, что позволяет предупредить осложнения и аварии в виде возможных поступлений пластовых флюидов и поглощений, обвалов, осыпей;
- веса бурового инструмента на крюке в статике в движении вверх-вниз для определения коэффициентов трения, что позволяет сравнить с моделью с учетом профиля скважины и коэффициентов трения, отклонения для предупреждения возможных осложнений;
- плотности промывочной жидкости, влияющей на давление в призабойной зоне влияющую на механическую скорость и реологию и смазывающие свойства промывочной жидкости.
Таким образом, заявленная система обеспечивает повышение срока службы бурового инструмента (долота, забойного двигателя и КНБК) и эффективность управления процессом бурения, за счет повышение механической скорости бурения из-за автоматизации процесса углубления скважины, уменьшения человеческого фактора, улучшения согласованности режимов работы учитывающий характеристики забойного двигателя, долота, разбуриваемых пород.
Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как оно раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
Изобретение относится к области бурения нефтяных и газовых скважин, а именно к системе для автоматизированного управления работой буровыми установками. Техническим результатом изобретения является повышение срока службы бурового инструмента и эффективности управления процессом бурения. Система автоматизированного управления процессом бурения скважин содержит вычислительный наземный центр, содержащий блок сравнения и управления, приемник сигналов технологических данных от бурового долота или наддолотного переводника, приемник сигналов технологических данных от поверхностного оборудования буровой установки и монитор бурильщика; датчики технологических параметров, расположенные на долоте или на наддолотном модуле, выполненные с возможностью регистрации и передачи на приемник сигналов следующих технологических параметров: осевая нагрузка на долото, крутящий момент на долоте, координаты положения долота в скважине по углам азимута и зенита, температура и давление в скважине в призабойной зоне, вибрации и шоки в процессе бурения, расход промывочной жидкости, данные гамма-каротажа и резистивиметрии; датчики технологических параметров бурового оборудования, расположенные на поверхностном оборудовании буровой установки. При этом датчики, расположенные на поверхности, выполнены с возможностью регистрации и передачи на приемник сигналов следующих технологических параметров: давление на манифольде, расход на входе и выходе циркуляционной системы, плотность промывочной жидкости на входе и выходе циркуляционной системы, температура промывочной жидкости на входе и выходе циркуляционной системы, скорость вращения барабана буровой лебедки, крутящий момент и частота вращения на роторе или верхнем силовом приводе, вес бурового инструмента на крюке в статике в движении вверх-вниз. Кроме того, система содержит исполнительный механизм ротора или верхнего силового привода, исполнительный механизм буровой лебедки, исполнительный механизм дозаторов химических реагентов емкостей блока приготовления растворов и исполнительный механизм бурового насоса, а также модуль управления исполнительными механизмами, связанный с блоком сравнения и управления и выполненный с возможностью передачи указанным исполнительным механизмам сигналов управления работой буровой лебедкой, буровым долотом, дозаторами химических реагентов емкостей блока приготовления растворов и буровым насосом. 1 ил.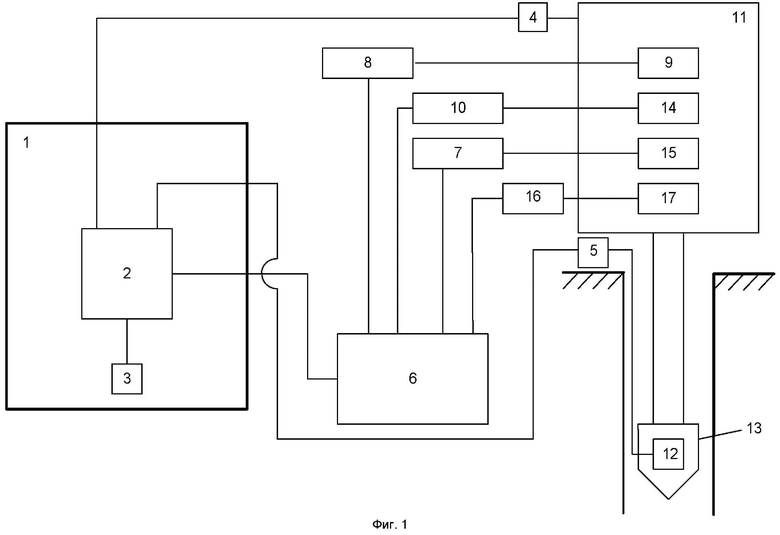
Система автоматизированного управления процессом бурения скважин, содержащая:
- датчики технологических параметров, расположенные на долоте или наддолотном переводнике и выполненные с возможностью регистрации и передачи на приемник сигналов следующих технологических параметров: осевая нагрузка на долото, крутящий момент на долоте, координаты положения долота в скважине по углам азимута и зенита, температура и давление в скважине в призабойной зоне, вибрации и шоки в процессе бурения, расхода промывочной жидкости, данные гамма каротажа и резистивиметрии;
- датчики технологических параметров бурового оборудования буровой установки, расположенного на поверхности, при этом указанные датчики выполнены с возможностью регистрации и передачи на приемник сигналов следующих технологических параметров: давление на манифольде, расход на входе и выходе циркуляционной системы, плотность промывочной жидкости на входе и выходе циркуляционной системы, температура промывочной жидкости на входе и выходе циркуляционной системы, скорость вращения барабана буровой лебедки, крутящий момент и частота вращения на роторе или верхнем силовом приводе, вес бурового инструмента на крюке в статике в движении вверх-вниз;
- вычислительный наземный центр, содержащий блок сравнения и управления, расположенный на устье скважины, приемник сигналов технологических данных от бурового долота или наддолотного переводника, приемник сигналов технологических данных от поверхностного оборудования буровой установки, и монитор бурильщика;
- исполнительный механизм ротора или верхнего силового привода, исполнительный механизм буровой лебедки, исполнительный механизм бурового насоса и исполнительный механизм дозаторов химических реагентов блока приготовления растворов;
- модуль управления исполнительными механизмами, связанный с блоком сравнения и управления и выполненный с возможностью передачи указанным исполнительным механизмам сигналов управления работой буровой лебедкой, ротором или ВСП, дозаторами химических реагентов емкостей блока приготовления растворов и буровым насосом.
| US 9784089 B2, 10.10.2017 | |||
| US 2020277849 A1, 03.09.2020 | |||
| WO 2017180157 A1, 19.10.2017 | |||
| Система автоматического регулирования реологических параметров бурового раствора | 1981 |
|
SU969885A1 |
| СИСТЕМЫ И СПОСОБЫ ИНТЕРПРЕТИРОВАНИЯ С ПОДДЕРЖАНИЕМ АНОНИМНОСТИ ПРОИЗВОДСТВЕННОЙ ДЕЯТЕЛЬНОСТИ В ПРИМЕНЕНИИ К БУРОВЫМ УСТАНОВКАМ | 2012 |
|
RU2613218C2 |
| ЗАМКНУТЫЙ ЦИКЛ УПРАВЛЕНИЯ ПАРАМЕТРАМИ БУРЕНИЯ | 2013 |
|
RU2639219C2 |
| WO 2005113930 A1, 01.12.2005 | |||
| US 2017335671 A1, 23.11.2017. | |||

