Область техники
Изобретение относится к области измерительной техники и может быть использовано для измерения угловых перемещений, скоростей и ускорений летательных аппаратов, автомобилей и других объектов в бесплатформенных инерциальных навигационных системах (предлагаемый датчик может быть жестко связан с корпусом объекта), а также в качестве элемента конструкции гироскопического датчика угловой скорости или ускорения.
Предшествующий уровень техники
Известен емкостный датчик угловых перемещений (см. описание к а.с. СССР №1502959 А1, МПК G01B 7/30, опубл. 23.08.89 г.), который содержит установленный с возможностью перемещения плоский дисковый электрод, в котором выполнены с заданным шагом сквозные секторообразные окна. Соосно с подвижным электродом установлено неподвижное плоское диэлектрическое основание. На его внутренней поверхности, обращенной к подвижному электроду, закреплены концентрические электрически изолированные одно от другого внешнее и внутреннее электропроводные кольца. В процессе измерения к кольцам подключают фазочувствительный измерительный прибор. На той же поверхности диэлектрического основания размещены распределенные по его окружности и размещенные в интервале между кольцами секторообразные электропроводные радиальные пластины, электрически изолированные одна от другой. На обратной стороне диэлектрического основания датчика, напротив радиальных пластин, закреплены пары кольцевых потенциальных электродов, размещенных концентрично. В процессе измерений к ним подключают 4-фазный источник питания переменного тока. Каждая из пар потенциальных электродов выполнена в виде сопряженных кольцевых полос с зубцами синусоидальной формы. Период синусоиды равен периоду размещения окон подвижного дискового электрода. Секторообразные радиальные пластины перекрывают обе пары потенциальных электродов. Число радиальных пластин выбирается в несколько раз превышающим число окон подвижного электрода.
Низкая точность измерения аналога - емкостного датчика угловых перемещений - определяется наличием внешних соединительных проводников между проводниками, расположенными на неподвижном дисковом основании, и фазочувствительным измерительным прибором (4-фазным источником питания переменного тока). Вследствие этого на точность измерения влияют изменения емкости, индуктивности и электрического сопротивления внешних соединительных проводников, например, при изменении температуры внешней среды.
В емкостном датчике угловых перемещений результат измерения зависит от диэлектрической проницаемости среды между плоским дисковым электродом и неподвижным дисковым основанием, что также снижает точность измерения.
Наиболее близким аналогом - прототипом предлагаемого емкостного датчика для измерения параметров углового движения объектов - является устройство для измерения угловых скоростей и перемещений (см. описание к а.с. СССР №618679, МПК G01P 3/48, опубл. 22.07.78 г.).
Указанное устройство для измерения угловых скоростей и перемещений, прототип, содержит высокочастотный генератор, многослойный статор с тремя печатными обмотками возбуждения и двумя печатными измерительными обмотками, включенными в качестве смежных плеч с регулировочными сопротивлениями в мостовую схему, подключенными к измерительной схеме, ротор с короткозамкнутой печатной обмоткой, детектор и счетчик импульсов.
Выход генератора соединен с тремя печатными обмотками возбуждения статора. Выход мостовой схемы связан со входом детектора, выход которого соединен со входом счетчика импульсов. Каждая обмотка изготовлена на изоляционном материале, на который печатным способом наносят проводники шести обмоток, представляющие собой ряд радиальных токопроводящих пластин-проводников, соединенных поочередно то у центра, то на периферии, образующих непрерывную линию, имеющую разрыв для присоединения токонесущих проводов (обмотка ротора закорочена).
Низкая точность измерения устройства для измерения угловых скоростей и перемещений, прототипа, определяется ограниченным по технологическим соображениям количеством в ряду радиальных токопроводящих пластин-проводников каждой обмотки, которое зависит, например, от минимального расстояния между ротором и статором. При этом количество импульсов, поступающее на счетчик импульсов измерительной схемы и являющееся мерой измерения углового перемещения ротора относительно статора, например, при вращении ротора относительно статора на 360°, равно количеству в ряду (расположенных по окружности) радиальных токопроводящих пластин-проводников каждой обмотки.
Раскрытие изобретения
Задачей создания изобретения является разработка надежного в работе при тяжелых условиях, имеющего более высокие точность измерения и чувствительность емкостного датчика для измерения параметров углового движения объектов.
Поставленная задача решается с помощью признаков, указанных в 1-м пункте формулы изобретения, общих с прототипом, таких как емкостный датчик для измерения параметров углового движения объектов, содержащий ротор и статор, выполненные в виде двух дисков из диэлектрического материала, шесть катушек индуктивности и измерительную схему, и отличительных существенных признаков, таких как ротор установлен на подвесе в опоре и выполняет функцию инерционной массы, при этом датчик дополнительно снабжен шестью колебательными контурами, гальванически развязанными от измерительной схемы, которые содержат шесть катушек индуктивности, а также секциями шести электродов трех колебательных контуров, расположенных и равномерно распределенных по окружности на стороне статора, обращенной к ротору, секциями шести электродов трех колебательных контуров, расположенных и равномерно распределенных по окружности меньшего диаметра на стороне статора, обращенной к ротору, секциями общего электрода трех колебательных контуров, расположенных и равномерно распределенных по окружности на стороне ротора, обращенной к статору, над секциями шести электродов трех колебательных контуров, секциями общего электрода трех колебательных контуров, расположенных и равномерно распределенных по окружности меньшего диаметра на стороне ротора, обращенной к статору, над секциями шести электродов трех колебательных контуров, а измерительная схема включает шесть катушек индуктивности подкачки энергии в шесть колебательных контуров и шесть катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров.
В пункте 2 формулы нашли отражение особенности выполнения и размещения шести катушек индуктивности шести колебательных контуров, шести катушек индуктивности подкачки энергии в шесть колебательных контуров и шести катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров, а именно шесть катушек индуктивности шести колебательных контуров, шесть катушек индуктивности подкачки энергии в шесть колебательных контуров и шесть катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров выполнены намоткой проводом на шести диэлектрических каркасах, которые размещены по окружности на внешней стороне статора.
В пункте 3 формулы нашли отражение особенности выполнения опоры подвеса ротора, а именно опора подвеса ротора выполнена в виде двух прецизионных камневых втулок из сапфира, рубина или искусственного камня.
Высокие точность измерения и чувствительность предлагаемого емкостного датчика для измерения параметров углового движения объектов определяются гальванической развязкой шести колебательных контуров от измерительной схемы. Вследствие этого отсутствуют соединительные проводники между шестью колебательными контурами и измерительной схемой, что повышает точность измерения и чувствительность датчика.
В предлагаемом емкостном датчике для измерения параметров углового движения объектов происходит уменьшение влияния на результат измерения изменений частоты задающего генератора (например, от температуры) вычислительного устройства измерительной схемы, температуры и состава внешней среды, расстояния между ротором и статором, а также непараллельности плоскостей и несоосности ротора и статора (положения оси подвеса ротора относительно статора), что повышает точность измерения. При этом измерение угловых перемещения, скорости и ускорения контролируемого объекта происходит строго в плоскости диска статора (нет поперечной чувствительности).
Вышеперечисленная совокупность существенных признаков позволяет получить следующий технический результат - повышение точности измерения и чувствительности емкостного датчика для измерения параметров углового движения объектов.
Краткое описание фигур чертежей
Устройство предлагаемого емкостного датчика для измерения параметров углового движения объектов иллюстрируется следующими чертежами:
Фиг.1. Емкостный датчик для измерения параметров углового движения объектов, продольный разрез.
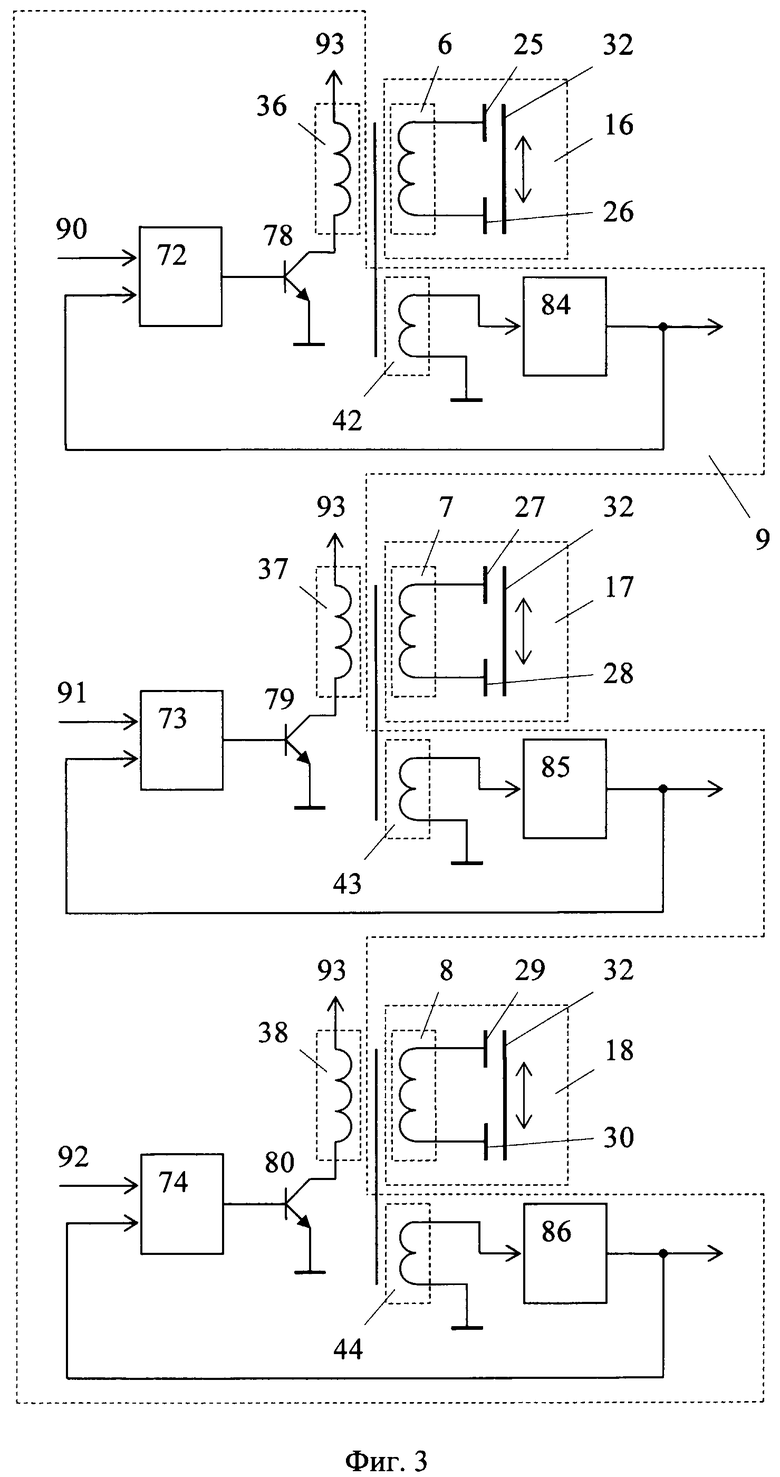
Фиг.2 и 3. Структурная схема емкостного датчика для измерения параметров углового движения объектов.
Фиг.4. Вид А на фиг.1 при условно прозрачных корпусе, крышке и роторе (проводники ротора находятся над проводниками статора).
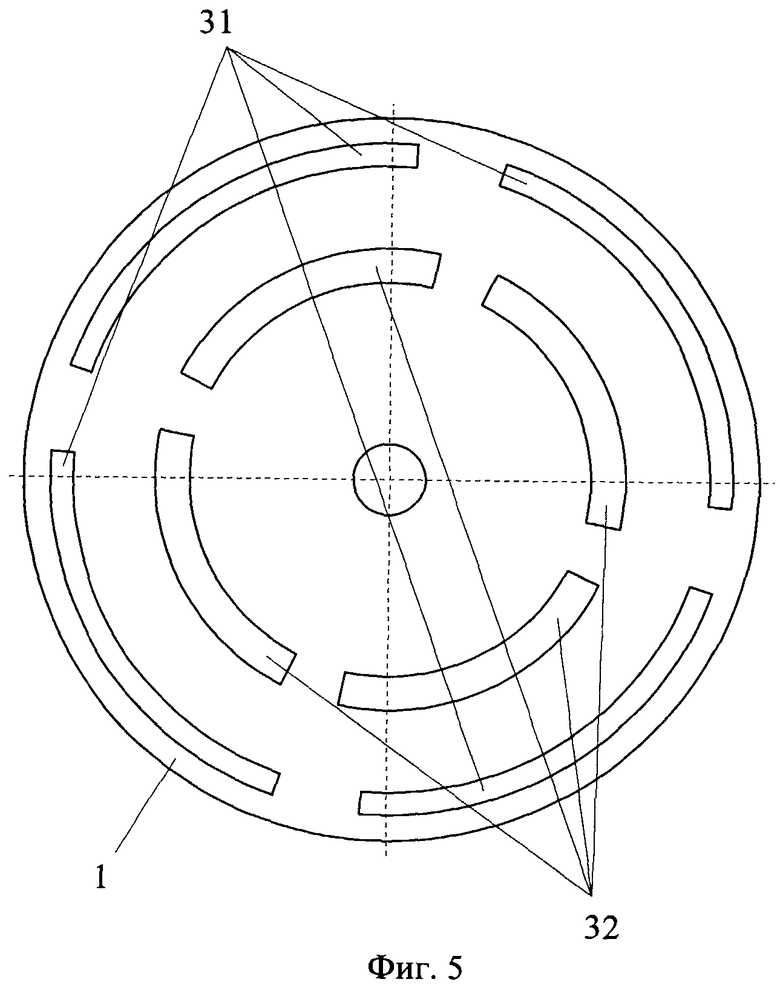
Фиг.5. Вид ротора со стороны, обращенной к статору.
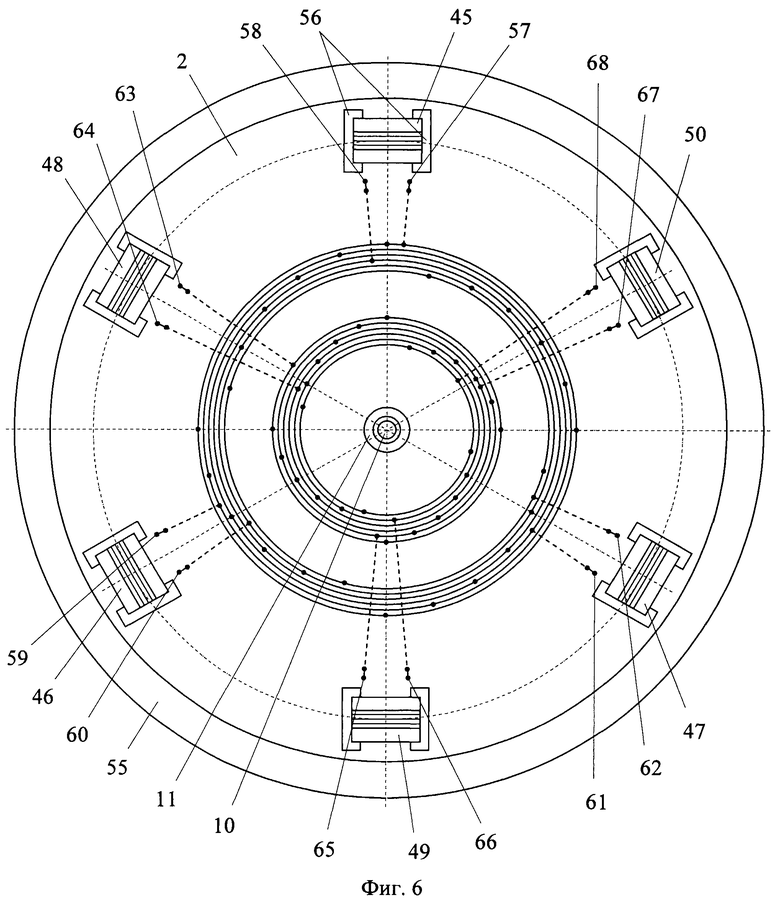
Фиг.6. Вид В на фиг.1 при условно прозрачном корпусе.
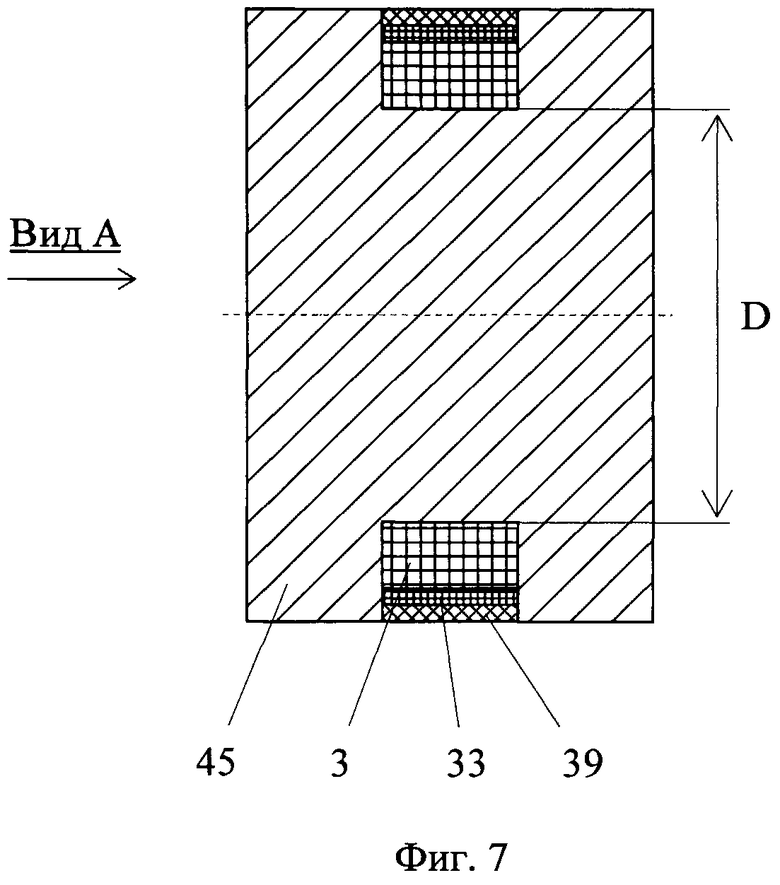
Фиг.7. Первый диэлектрический каркас с катушками индуктивности, продольный разрез.
Фиг.8. Вид А на фиг.7.
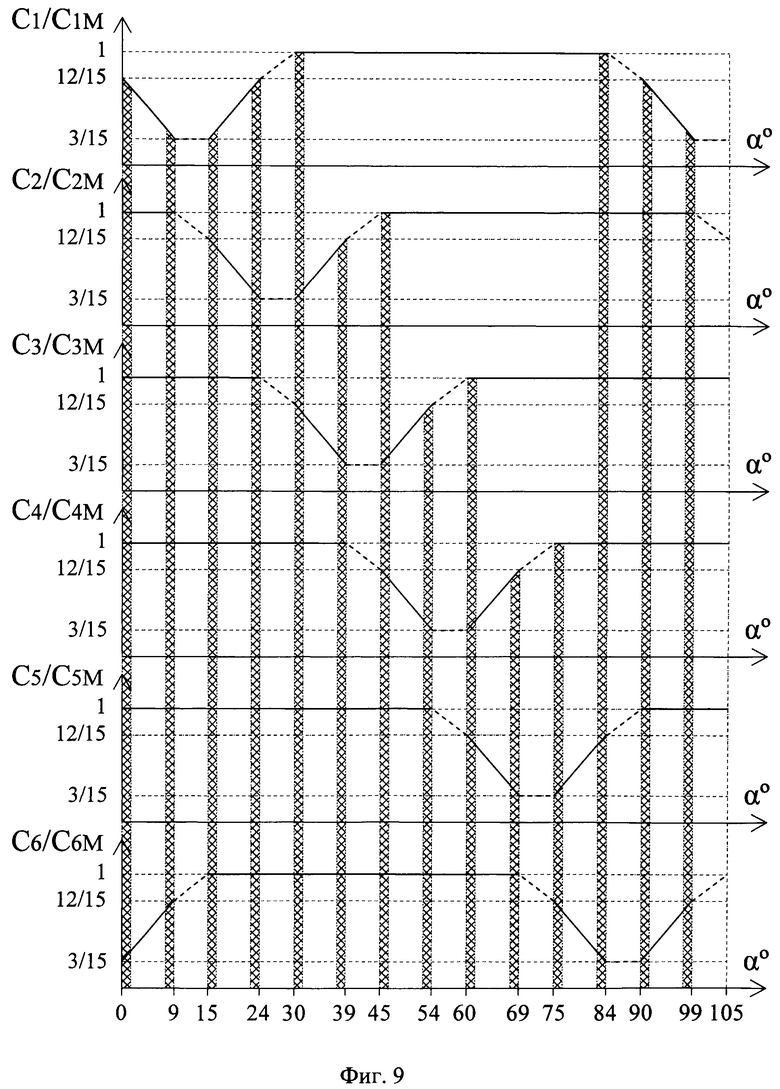
Фиг.9. Диаграмма состояний емкостей между секциями электродов первого, второго и третьего колебательных контуров при вращении ротора.
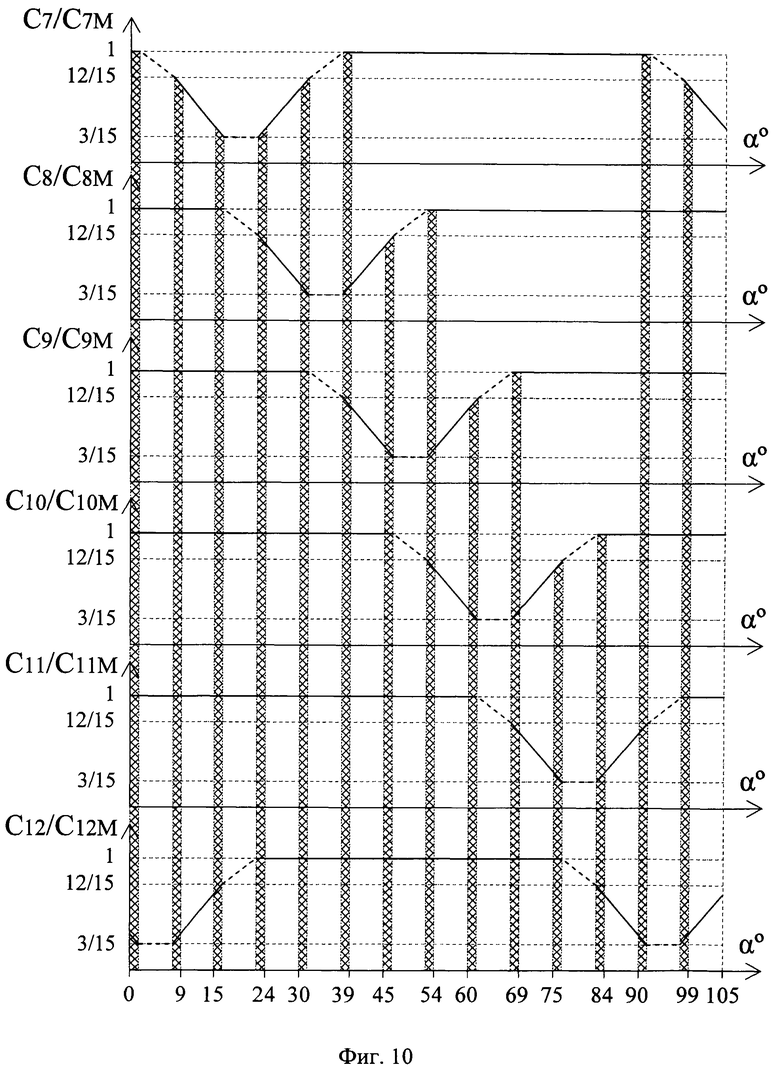
Фиг.10. Диаграмма состояний емкостей между секциями электродов четвертого, пятого и шестого колебательных контуров при вращении ротора.
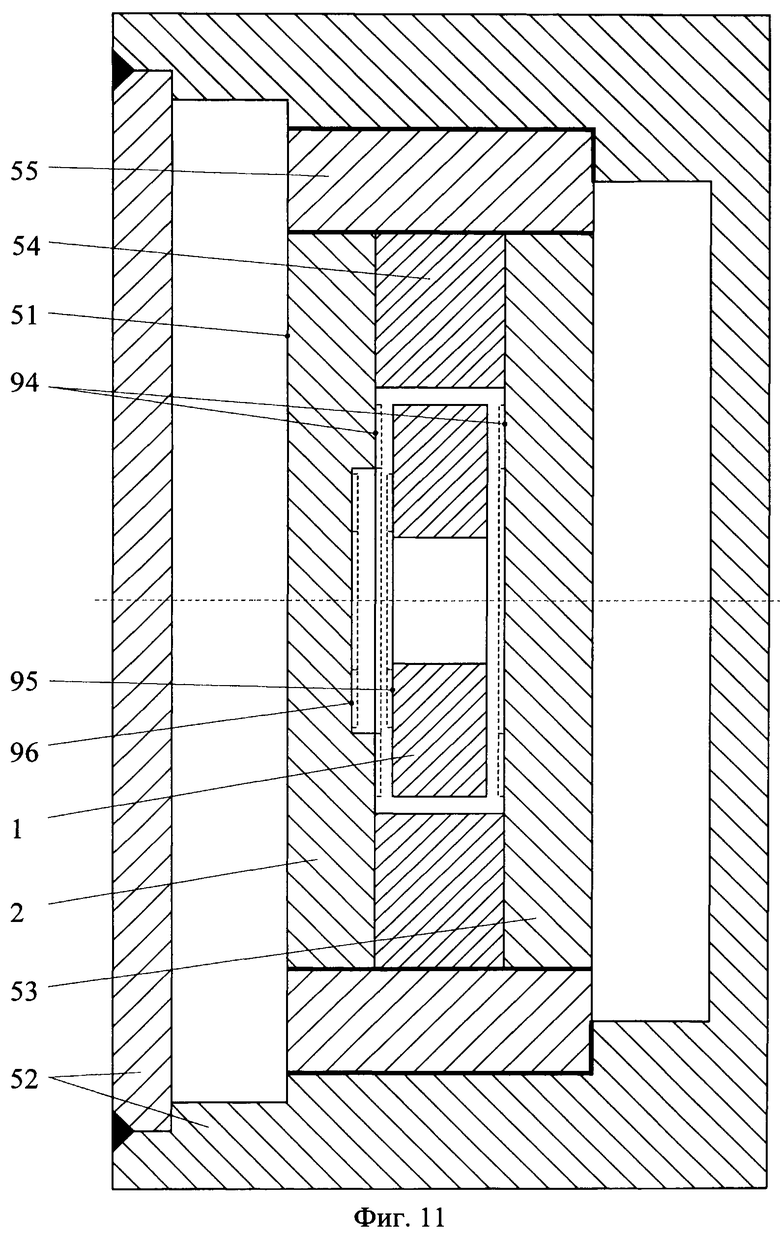
Фиг.11. Емкостный датчик для измерения параметров углового движения объектов с ультразвуковым газовым подшипником, продольный разрез.
Осуществление изобретения
Емкостный датчик для измерения параметров углового движения бъектов содержит корпус 52 из нержавеющей стали (см. фиг.1), ротор 1 и статор 2, выполненные в виде двух дисков из диэлектрического (изоляционного) материала, а также измерительную схему 9 (фиг.2, 3). Корпус 52 жестко закреплен на объекте.
Первый 13, второй 14, третий 15, четвертый 16, пятый 17 и шестой 18 колебательные контуры гальванически развязаны от измерительной схемы 9 и содержат соответственно катушку индуктивности 3 первого 13 колебательного контура, катушку индуктивности 4 второго 14 колебательного контура, катушку индуктивности 5 третьего 15 колебательного контура, катушку индуктивности 6 четвертого 16 колебательного контура, катушку индуктивности 7 пятого 17 колебательного контура и катушку индуктивности 8 шестого 18 колебательного контура.
Секции первого 19 и второго 20 электродов первого 13 колебательного контура (см. фиг.4), секции первого 21 и второго 22 электродов второго 14 колебательного контура, а также секции первого 23 и второго 24 электродов третьего 15 колебательного контура расположены и равномерно распределены по окружности на стороне статора 2, обращенной к ротору 1.
Секции первого 25 и второго 26 электродов четвертого 16 колебательного контура, секции первого 27 и второго 28 электродов пятого 17 колебательного контура, а также секции первого 29 и второго 30 электродов шестого 18 колебательного контура расположены и равномерно распределены по окружности меньшего диаметра на стороне статора 2, обращенной к ротору 1.
Первый и второй выводы катушки индуктивности 3 первого 13 колебательного контура подключены соответственно к секциям первого 19 и второго 20 электродов первого 13 колебательного контура, первый и второй выводы катушки индуктивности 4 второго 14 колебательного контура подключены соответственно к секциям первого 21 и второго 22 электродов второго 14 колебательного контура, первый и второй выводы катушки индуктивности 5 третьего 15 колебательного контура подключены соответственно к секциям первого 23 и второго 24 электродов третьего 15 колебательного контура, первый и второй выводы катушки индуктивности 6 четвертого 16 колебательного контура подключены соответственно к секциям первого 25 и второго 26 электродов четвертого 16 колебательного контура, первый и второй выводы катушки индуктивности 7 пятого 17 колебательного контура подключены соответственно к секциям первого 27 и второго 28 электродов пятого 17 колебательного контура, а также первый и второй выводы катушки индуктивности 8 шестого 18 колебательного контура подключены соответственно к секциям первого 29 и второго 30 электродов шестого 18 колебательного контура.
Секции общего электрода 31 первого 13. второго 14 и третьего 15 колебательных контуров расположены и равномерно распределены по окружности на стороне ротора 1, обращенной к статору 2 (см. фиг.4 и 5), над секциями шести электродов первого 13, второго 14 и третьего 15 колебательных контуров, расположенных и равномерно распределенных по окружности на стороне статора 2, обращенной к ротору 1.
Секции общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров расположены и равномерно распределены по окружности меньшего диаметра на стороне ротора 1, обращенной к статору 2, над секциями шести электродов четвертого 16, пятого 17 и шестого 18 колебательных контуров, расположенных и равномерно распределенных по окружности меньшего диаметра на стороне статора 2, обращенной к ротору 1.
При равномерном распределении секций каждого электрода шести колебательных контуров по соответствующим окружностям на обращенных друг к другу сторонах ротора 1 и статора 2 происходит уменьшение влияния на результат измерения угловых перемещения, скорости и ускорения непараллельности плоскостей ротора 1 и статора 2, а также несоосности (смещение осей) ротора 1 и статора 2 друг относительно друга. Секция выполнена в виде металлической пластины, которая ограничена внешней окружностью, внутренней окружностью и двумя радиусами.
Секции каждого электрода шести колебательных контуров, расположенные на стороне статора 2, обращенной к ротору 1, объединены между собой с помощью межсекционных электрических соединений в виде концентрических и радиальных проводников, а также сквозных металлизированных отверстий с контактными площадками (см. фиг.4 и 6). При этом каждая указанная секция занимает угловой сектор, равный 15° минус угловой сектор, который занимает промежуток между двумя соседними секциями, расположенными рядом по окружности (каждый промежуток между двумя соседними секциями имеет одинаковую и малую угловую ширину).
Каждая секция двух общих электродов шести колебательных контуров, расположенная на стороне ротора 1, обращенной к статору 2, занимает угловой сектор, равный 75°. Секции общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров сдвинуты по окружности относительно секций общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров на угол, равный 7,5°.
Предпочтительным является количество секций в каждом из электродов шести колебательных контуров, равное четырем.
В общем случае количество секций в каждом из электродов шести колебательных контуров может быть равно восьми (кратное четырем).
На фиг.4 для наглядности изображения обозначена только одна из четырех секций каждого электрода шести колебательных контуров.
Ротор 1 установлен на подвесе 10 в опоре, которая выполнена в виде первой 11 и второй 12 прецизионных камневых втулок (двух подшипников). Ротор 1 и подвес 10 (подвижная система) выполняют функцию инерционной массы. Ось подвеса 10 выполнена из износоустойчивого металла.
При угловом перемещении контролируемого объекта и ничтожно малом коэффициенте трения скольжения между подвижной системой и двумя прецизионными камневыми втулками подвижная система остается практически на одном и том же месте и образует искусственную точку опоры.
Высокие вибрационная и ударная прочность предлагаемого емкостного датчика для измерения параметров углового движения объектов определяются малой массой подвижной системы (малые нагрузки на ось подвеса 10 и две прецизионные камневые втулки при воздействии на объект вибрационных и ударных ускорений).
Первый 11 и второй 12 подшипники установлены соответственно в статоре 2 и крышке 53, выполненной в виде диска из диэлектрического материала. Между статором 2 и крышкой 53 установлено первое 54 кольцо из диэлектрического материала, которое предназначено для фиксации с высокой точностью осевого зазора между обращенными друг к другу поверхностями статора 2 и крышки 53.
Второе 55 кольцо из диэлектрического материала соединяет между собой статор 2, первое 54 кольцо, крышку 53 и корпус 52.
На фиг.1 клеевые соединения, соединения пайкой или стеклоспаи между элементами конструкции емкостного датчика для измерения параметров углового движения объектов обозначены линиями двойной толщины. Внутреннее пространство корпуса 52 вакуумируют.
Ротор 1, статор 2, первое 54 и второе 55 кольца могут быть выполнены из стеклокерамики, например фотоситалла ФС 148-1, описанного в кн. под редакцией Корицкого Ю.В. Справочник по электротехническим материалам, т.2. - М.: Энергия, 1974, с.295, 296.
Применение фотоситалла ФС 148-1 в конструкции предлагаемого датчика позволяет получить в результате многоступенчатого процесса фотографически точные микроотверстия в статоре 2.
Печатные проводники на роторе 1 и статоре 2 могут быть выполнены из меди, алюминия или золота.
Статор 2 может быть выполнен по пленочной технологии изготовления интегральных микросхем (пленочная микросхема) на полупроводниковой пластине.
На Фиг.4 показано начальное взаимное положение ротора 1 относительно статора 2, соответствующее нулю угловых градусов (стрелкой показано направление вращения ротора 1 относительно статора 2).
Измерительная схема 9 содержит катушку индуктивности 33 подкачки энергии в первый 13 колебательный контур, катушку индуктивности 34 подкачки энергии во второй 14 колебательный контур, катушку индуктивности 35 подкачки энергии в третий 15 колебательный контур, катушку индуктивности 36 подкачки энергии в четвертый 16 колебательный контур, катушку индуктивности 37 подкачки энергии в пятый 17 колебательный контур, катушку индуктивности 38 подкачки энергии в шестой 18 колебательный контур, катушку индуктивности 39 считывания частоты резонансных колебаний первого 13 колебательного контура, катушку индуктивности 40 считывания частоты резонансных колебаний второго 14 колебательного контура, катушку индуктивности 41 считывания частоты резонансных колебаний третьего 15 колебательного контура, катушку индуктивности 42 считывания частоты резонансных колебаний четвертого 16 колебательного контура, катушку индуктивности 43 считывания частоты резонансных колебаний пятого 17 колебательного контура, катушку индуктивности 44 считывания частоты резонансных колебаний шестого 18 колебательного контура.
Шесть катушек индуктивности шести колебательных контуров, шесть катушек индуктивности подкачки энергии в шесть колебательных контуров и шесть катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров выполнены намоткой проводом одинаковым образом на первом 45, втором 46, третьем 47, четвертом 48, пятом 49 и шестом 50 диэлектрических каркасах, которые размещены по окружности на внешней стороне 51 статора 2.
На фиг.7 и 8 изображен первый 45 диэлектрический каркас с намотанными на него катушкой индуктивности 3 первого 13 колебательного контура, катушкой индуктивности 33 подкачки энергии в первый 13 колебательный контур и катушкой индуктивности 39 считывания частоты резонансных колебаний первого 3 колебательного контура. При этом металлизированные участки поверхности диэлектрического каркаса 45, предназначенные для соединения его пайкой с двумя металлическими контактными площадками 56 (см. фиг.6), не показаны.
На фиг.1 шесть диэлектрических каркасов с катушками индуктивности, размещенные на внешней стороне 51 статора 2, а также электрические вводы шести катушек индуктивности подкачки энергии в шесть колебательных контуров и шести катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров, герметизированные стеклом и размещенные в приваренной в виде диска стенке корпуса 52, не показаны.
Первый и второй выводы катушки индуктивности 3 первого 13 колебательного контура, первый и второй выводы катушки индуктивности 4 второго 14 колебательного контура, первый и второй выводы катушки индуктивности 5 третьего 15 колебательного контура, первый и второй выводы катушки индуктивности 6 четвертого 16 колебательного контура, первый и второй выводы катушки индуктивности 7 пятого 17 колебательного контура, а также первый и второй выводы катушки индуктивности 8 шестого 18 колебательного контура припаивают соответственно к первой 57, второй 58, третьей 59, четвертой 60, пятой 61, шестой 62, седьмой 63, восьмой 64, девятой 65, десятой 66, одиннадцатой 67 и двенадцатой 68 контактным площадкам.
На фиг.6 проводники, выполненные навесным монтажом, обозначены пунктирными линиями. Статор 2 может быть выполнен на трехслойной печатной плате (отсутствует навесной монтаж).
Измерительная схема 9 дополнительно включает первый 69, второй 70, третий 71, четвертый 72, пятый 73 и шестой 74 элементы И, первый 75, второй 76, третий 77, четвертый 78, пятый 79 и шестой 80 транзисторы, первый 81, второй 82, третий 83, четвертый 84, пятый 85 и шестой 86 компараторы, а также вычислительное устройство (на фиг.2 и 3 не показано).
Первый 87 вход первого 69 элемента И, первый 88 вход второго 70 элемента И, первый 89 вход третьего 71 элемента И, первый 90 вход четвертого 72 элемента И, первый 91 вход пятого 73 элемента И и первый 92 вход шестого 74 элемента И являются входами запуска резонансных колебаний электромагнитного поля соответственно в первом 13, втором 14, третьем 15, четвертом 16, пятом 17 и шестом 18 колебательных контурах.
Первые выводы шести катушек индуктивности подкачки энергии в шесть колебательных контуров соединены с плюсовым выводом 93 питания.
Второй вывод катушки индуктивности 33 подкачки энергии в первый 13 колебательный контур, второй вывод катушки индуктивности 34 подкачки энергии во второй 14 колебательный контур, второй вывод катушки индуктивности 35 подкачки энергии в третий 15 колебательный контур, второй вывод катушки индуктивности 36 подкачки энергии в четвертый 16 колебательный контур, второй вывод катушки индуктивности 37 подкачки энергии в пятый 17 колебательный контур и второй вывод катушки индуктивности 38 подкачки энергии в шестой 18 колебательный контур соединены соответственно с коллекторами первого 75, второго 76, третьего 77, четвертого 78, пятого 79 и шестого 80 транзисторов.
Первый вывод катушки индуктивности 39 считывания частоты резонансных колебаний первого 13 колебательного контура, первый вывод катушки индуктивности 40 считывания частоты резонансных колебаний второго 14 колебательного контура, первый вывод катушки индуктивности 41 считывания частоты резонансных колебаний третьего 15 колебательного контура, первый вывод катушки индуктивности 42 считывания частоты резонансных колебаний четвертого 16 колебательного контура, первый вывод катушки индуктивности 43 считывания частоты резонансных колебаний пятого 17 колебательного контура и первый вывод катушки индуктивности 44 считывания частоты резонансных колебаний шестого 18 колебательного контура соединены соответственно с прямыми входами первого 81, второго 82, третьего 83, четвертого 84, пятого 85 и шестого 86 компараторов, на инверсные входы которых (на фиг.2 и 3 не показаны) подают опорное напряжение.
Вторые выводы шести катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров соединены с выводом «общий» питания. Выходы первого 69, второго 70, третьего 71, четвертого 72, пятого 73 и шестого 74 элементов И соединены соответственно с базами первого 75, второго 76, третьего 77, четвертого 78, пятого 79 и шестого 80 транзисторов, эмиттеры которых соединены с выводом «общий» питания.
Выходы первого 81, второго 82, третьего 83, четвертого 84, пятого 85 и шестого 86 компараторов соединены соответственно со вторыми входами первого 69, второго 70, третьего 71, четвертого 72, пятого 73 и шестого 74 элементов И, а также с вычислительным устройством.
Для того чтобы уменьшить влияние краевого эффекта на результат измерения необходимо, чтобы край рабочей секции, размещенной на роторе 1, не подходил к краю рабочей секции, размещенной на статоре 2, на расстояние ближе чем 10·h, где h - расстояние между ротором 1 и статором 2.
При этом зона краевого эффекта отстоит от середины промежутка между двумя соседними секциями, расположенными по окружности на стороне статора 2, обращенной к ротору 1, на угол, равный 3°. Пунктирными линиями на фиг.9 и 10 обозначены зоны краевого эффекта при измерении углового перемещения (α°).
При построении диаграмм (см. фиг.9 и 10) малую угловую ширину промежутка между двумя соседними секциями, расположенными рядом по окружности на стороне статора 2, обращенной к ротору 1, не учитываем.
При равенстве емкостей, индуктивностей и электрических сопротивлений первого 13, второго 14 и третьего 15 (или четвертого 16, пятого 17 и шестого 18) колебательных контуров минимальные частоты резонансных колебаний указанных колебательных контуров будут равны между собой при вращении ротора 1 относительно статора 2 (указанный режим работы может быть использован при настройке датчика). В случае необходимости, выравнивание постоянных составляющих емкостей указанных колебательных контуров может быть произведено путем изменения ширины соответствующих соединительных проводников.
Емкостный датчик для измерения параметров углового движения объектов и его элементы конструкции могут иметь следующие технические характеристики и параметры:
Предлагаемый емкостный датчик для измерения параметров углового движения объектов может быть применен в качестве элемента конструкции поплавкового гироскопического датчика угловой скорости или ускорения (не показан). В этом случае печатные проводники секций двух общих электродов шести колебательных контуров размещают на торцевой поверхности поплавка, обращенной к статору 2 (см. кн. под редакцией Горенштейна И.А. Инерциальные навигационные системы. - М.: Машиностроение, 1970, с.137-147, 171-177. В описании указанная книга обозначена как литература {1}).
При этом диск с центральным отверстием статора 2 размещен на внутренней торцевой поверхности корпуса гироскопического датчика (утоплен в стенку корпуса) и охватывает камневый или газовый подшипник. Осевое расстояние между обращенными друг к другу плоскостями поплавка и диска статора 2 может составить от 10 мкм до 20 мкм.
На фиг.11 изображен емкостный датчик для измерения параметров углового движения объектов с ультразвуковым газовым подшипником (см. литературу {1}, с.130, 131). Внутреннее пространство корпуса 52 указанного датчика может быть заполнено инертным газом. Ротор 1 в виде кольца может быть выполнен из монокристалла кварца или пьезоэлектрической керамики. Направление кристаллографических осей монокристалла кварца или поляризацию пьезоэлектрической керамики кольца ротора 1 выбирают (или производят) таким образом, чтобы в кольце ротора 1 возбуждались радиальные колебания через зазор (см. кн. Малов В.В. Пьезорезонансные датчики. - М.: Энергоатомиздат, 1989, с.22-24). При этом напряжение переменного тока ультразвуковой частоты (от 20 кГц до 50 кГц) подают на два кольцевых электрода конденсатора и возбуждают в кольце ротора 1 радиальные колебания через зазор.
На фиг.11 места размещения двух кольцевых электродов конденсатора, секций двух общих электродов шести колебательных контуров и секций двенадцати электродов шести колебательных контуров обозначены соответственно позициями 94, 95 и 96 (показаны сверху пунктирными линиями).
При аэродинамическом взвешивании ротора 1 (инерционной массы) при помощи газового подвеса (газовой подушки) полностью отсутствует сухое трение между поверхностью ротора 1 и обращенными к нему поверхностями частей (элементов) указанного датчика (радиальные или торцевые зазоры между указанными поверхностями могут составить от 0,02 до 0,05 мкм), что повышает точность измерения угловых перемещения, скорости и ускорения.
При радиальных колебаниях пьезоэлектрического резонатора (кольца ротора 1) происходит уменьшение влияния на результат измерения угловых перемещения, скорости и ускорения изменений радиальных размеров секций двух общих электродов шести колебательных контуров, что повышает точность измерения угловых перемещения, скорости и ускорения.
Устройство работает следующим образом.
После включения питания из параллельного канала вычислительного устройства измерительной схемы 9 на первый 87 вход первого 69 элемента И, первый 88 вход второго 70 элемента И и первый 89 вход третьего 71 элемента И подают уровни логической единицы, а на первый 90 вход четвертого 72 элемента И, первый 91 вход пятого 73 элемента И и первый 92 вход шестого 74 элемента И подают уровни логического нуля. Затем из параллельного канала вычислительного устройства на первый 87 вход первого 69 элемента И, первый 88 вход второго 70 элемента И и первый 89 вход третьего 71 элемента И подают единичные отрицательные импульсы (после предварительно поданных уровней логической единицы подают уровни логического нуля, а затем уровни логической единицы). С выходов первого 69, второго 70 и третьего 71 элементов И отрицательные импульсы поступают соответственно на базы первого 75, второго 76 и третьего 77 транзисторов, которые закрывают указанные транзисторы.
Вследствие этого в моменты изменения токов в катушке индуктивности 33 подкачки энергии в первый 13 колебательный контур, катушке индуктивности 34 подкачки энергии во второй 14 колебательный контур и катушке индуктивности 35 подкачки энергии в третий 15 колебательный контур наводятся ЭДС - электродвижущие силы индукции в первом 13, втором 14 и третьем 15 колебательных контурах, в которых возникают резонансные колебания электромагнитного поля.
Возможно возбуждение резонансных колебаний электромагнитного поля в первом 13, втором 14 и третьем 15 (или в четвертом 16, пятом 17 и шестом 18) колебательных контурах по передним фронтам (положительным перепадам) логических сигналов, поступающих из параллельного канала вычислительного устройства на три первых входа первого 69, второго 70 и третьего 71 (или четвертого 73, пятого 74 и шестого 75) элементов И. В этом случае вышеуказанные отрицательные импульсы, поступающие из параллельного канала вычислительного устройства, не подаются.
Частоты резонансных колебаний первого 13, второго 14 и третьего 15 колебательных контуров измеряют путем снятия информации соответственно с катушки индуктивности 39 считывания частоты резонансных колебаний первого 13 колебательного контура, катушки индуктивности 40 считывания частоты резонансных колебаний второго 14 колебательного контура и катушки индуктивности 41 считывания частоты резонансных колебаний третьего 15 колебательного контура.
С выходов первого 81, второго 82 и третьего 83 компараторов положительные сигналы прямоугольной формы поступают соответственно на вторые входы первого 69, второго 70 и третьего 71 элементов И, а также в вычислительное устройство измерительной схемы 9.
С выходов первого 69, второго 70 и третьего 71 элементов И прямоугольные импульсы поступают соответственно на базы первого 75, второго 76 и третьего 77 транзисторов. При открывании указанных транзисторов через катушку индуктивности 33 подкачки энергии в первый 13 колебательный контур, катушку индуктивности 34 подкачки энергии во второй 14 колебательный контур и катушку индуктивности 35 подкачки энергии в третий 15 колебательный контур протекают токи, при изменении которых в первом 13, втором 14 и третьем 15 колебательных контурах возникают ЭДС индукции.
Под действием ЭДС индукции в первом 13, втором 14 и третьем 15 колебательных контурах возникают токи, согласные с направлением токов соответственно в катушке индуктивности 33 подкачки энергии в первый 13 колебательный контур, катушке индуктивности 34 подкачки энергии во второй 14 колебательный контур и катушке индуктивности 35 подкачки энергии в третий 15 колебательный контур в каждый полупериод колебаний указанных колебательных контуров.
При этом в положительный полупериод колебаний в первый 13, второй 14 и третий 15 колебательные контуры подкачка энергии происходит во время увеличения тока соответственно в катушке индуктивности 33 подкачки энергии в первый 13 колебательный контур, катушке индуктивности 34 подкачки энергии во второй 14 колебательный контур и катушке индуктивности 35 подкачки энергии в третий 15 колебательный контур, а в отрицательный полупериод колебаний подкачка энергии происходит во время уменьшения тока.
Передача энергии в первый 13, второй 14 и третий 15 колебательные контуры происходит в моменты изменения токов в катушке индуктивности 33 подкачки энергии в первый 13 колебательный контур, катушке индуктивности 34 подкачки энергии во второй 14 колебательный контур и катушке индуктивности 35 подкачки энергии в третий 15 колебательный контур.
Таким образом, в первом 13, втором 14 и третьем 15 колебательных контурах возбуждают непрерывные незатухающие резонансные колебания электромагнитного поля с подкачкой энергии в определенные моменты времени, увеличивают в эти моменты амплитуду колебаний и определяют частоту резонансных колебаний первого 13, второго 14 и третьего 15 колебательных контуров.
На фиг.9 и 10 двойной штриховкой показаны зоны перекрытия диапазонов измерения первого 13, второго 14, третьего 15 и четвертого 16, пятого 17, шестого 18 колебательных контуров. Внутри зоны перекрытия диапазонов измерения, ширина которой составляет 1,5°, происходит переключение (передача измерения углового перемещения) от первого 13, второго 14 и третьего 15 колебательных контуров к четвертому 16, пятому 17 и шестому 18 колебательным контурам, и наоборот.
При угловом перемещении ротора 1 относительно статора 2, находящемся в диапазоне от 7,5° до 9° (см. Фиг.9 и 10), из параллельного канала вычислительного устройства измерительной схемы 9 на первый 87 вход первого 69 элемента И, первый 88 вход второго 70 элемента И и первый 89 вход третьего 71 элемента И подают уровни логического нуля (запрещают возбуждение резонансных колебаний электромагнитного поля в первом 13, втором 14 и третьем 15 колебательных контурах), а на первый 90 вход четвертого 72 элемента И, первый 91 вход пятого 73 элемента И и первый 92 вход шестого 74 элемента И подают уровни логической единицы, а затем отрицательные импульсы. Вследствие этого происходит возбуждение резонансных колебаний электромагнитного поля в четвертом 16, пятом 17 и шестом 18 колебательных контурах.
При угловом перемещении ротора 1 относительно статора 2, находящемся в диапазоне от 15° до 16,5°, из параллельного канала вычислительного устройства на первый 90 вход четвертого 72 элемента И, первый 91 вход пятого 73 элемента И и первый 92 вход шестого 74 элемента И подают уровни логического нуля (запрещают возбуждение резонансных колебаний электромагнитного поля в четвертом 16, пятом 17 и шестом 18 колебательных контурах), а на первый 87 вход первого 69 элемента И, первый 88 вход второго 70 элемента И и первый 89 вход третьего 71 элемента И подают уровни логической единицы, а затем единичные отрицательные импульсы. Вследствие этого происходит повторное возбуждение резонансных колебаний электромагнитного поля в первом 13, втором 14 и третьем 15 колебательных контурах и так далее.
В общем случае возможно одновременное возбуждение резонансных колебаний электромагнитного поля в шести колебательных контурах. При этом после выключения питания из вычислительного устройства измерительной схемы 9 на шесть первых входов шести элементов И подают сначала уровни логической единицы, а затем единичные отрицательные импульсы.
В этом случае с целью электромагнитной совместимости диапазон рабочих частот первого 13, второго 14 и третьего 15 колебательных контуров не совпадает с диапазоном рабочих частот четвертого 16, пятого 17 и шестого 18 колебательных контуров. Радиальные размеры секций двух общих электродов шести колебательных контуров, а также секций двенадцати электродов шести колебательных контуров равны между собой. Количество витков каждой из трех катушек индуктивности первого 13, второго 14 и третьего 15 колебательных контуров может составить 500 (индуктивность катушки индуктивности около 1100 мкГн), а количество витков каждой из трех катушек индуктивности четвертого 16, пятого 17 и шестого 18 колебательных контуров может составить 600 (индуктивность катушки индуктивности около 1700 мкГн).
Известно, что собственную частоту колебаний колебательного контура (см. кн. Савельев И.В. Курс общей физики, т.1, т.2. - М.: Наука, 1978, в описании указанная книга обозначена как литература {2}) определяют по формуле

литература {2}, том 2, с.254,
где ω0 - собственная частота колебаний колебательного контура (круговая или циклическая частота);
L - индуктивность колебательного контура;
С - емкость колебательного контура.
Период колебаний колебательного контура равен

литература {2}, том 1, с.193,
где π=3, 14….

литература {2}, том 1, с.193,
где f - частота колебаний.
С учетом активного (электрического) сопротивления частоту резонансных колебаний реального колебательного контура определяют по формуле

литература {2}, том 2, с.255,
где ω - частота колебаний реального колебательного контура (круговая или циклическая частота);
R - активное (электрическое) сопротивление колебательного контура.
При 1/(L·С) намного больше R2/(2·L)2, то есть при высокой добротности колебательного контура можно положить

литература {2}, том 2, с.257.
Период колебаний колебательного контура по формуле Томсона равен

литература {2}, том 2, с.254.
В дальнейшем периоды колебаний первого 13, второго 14, третьего 15, четвертого 16, пятого 17 и шестого 18 колебательных контуров будем определять по формуле Томсона.
Период колебаний первого 13 колебательного контура равен

где L1 - индуктивность первого 13 колебательного контура;
C01 - постоянная составляющая емкости первого 13 колебательного контура;
C1 - суммарная емкость между секциями первого 19 электрода первого 13 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров;
С4 - суммарная емкость между секциями второго 20 электрода первого 13 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров.
Период колебаний второго 14 колебательного контура равен

где L2 - индуктивность второго 14 колебательного контура;
С02 - постоянная составляющая емкости второго 14 колебательного контура;
C2 - суммарная емкость между секциями первого 21 электрода второго 14 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров;
С5 - суммарная емкость между секциями второго 22 электрода второго 14 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров.
Период колебаний третьего 15 колебательного контура равен

где L3 - индуктивность третьего 15 колебательного контура;
С03 - постоянная составляющая емкости третьего 15 колебательного контура;
С3 - суммарная емкость между секциями первого 23 электрода третьего 15 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров;
С6 - суммарная емкость между секциями второго 24 электрода третьего 15 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров.
Первый 13, второй 14 и третий 15 колебательные контуры выполнены таким образом, что постоянные составляющие емкостей и индуктивности указанных колебательных контуров практически равны между собой


При угловом перемещении ротора 1 относительно статора 2 выполняются следующие равенства

где C1M - максимальная суммарная емкость между секциями первого 19 электрода первого 13 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров;
C2M - максимальная суммарная емкость между секциями первого 21 электрода второго 14 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров;
C3M - максимальная суммарная емкость между секциями первого 23 электрода третьего 15 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров;
C4M - максимальная суммарная емкость между секциями второго 20 электрода первого 13 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров;
C5M - максимальная суммарная емкость между секциями второго 22 электрода второго 14 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров;
C6M - максимальная суммарная емкость между секциями второго 24 электрода третьего 15 колебательного контура и секциями общего электрода 31 первого 13, второго 14 и третьего 15 колебательных контуров.
Период колебаний четвертого 16 колебательного контура равен

где L4 - индуктивность четвертого 16 колебательного контура;
С04 - постоянная составляющая емкости четвертого 16 колебательного контура;
С7 - суммарная емкость между секциями первого 25 электрода четвертого 16 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров;
С10 - суммарная емкость между секциями второго 26 электрода четвертого 16 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров.
Период колебаний пятого 17 колебательного контура равен

где L5 - индуктивность пятого 17 колебательного контура;
С05 - постоянная составляющая емкости пятого 17 колебательного контура;
C8 - суммарная емкость между секциями первого 27 электрода пятого 17 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров;
С11 - суммарная емкость между секциями второго 28 электрода пятого 17 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров.
Период колебаний шестого 18 колебательного контура равен

где L6 - индуктивность шестого 18 колебательного контура;
С06 - постоянная составляющая емкости шестого 18 колебательного контура;
С9 - суммарная емкость между секциями первого 29 электрода шестого 18 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров;
C12 - суммарная емкость между секциями второго 30 электрода шестого 18 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров.
Четвертый 16, пятый 17 и шестой 18 колебательные контуры выполнены таким образом, что постоянные составляющие емкостей и индуктивности указанных колебательных контуров практически равны между собой


При угловом перемещении ротора 1 относительно статора 2 выполняются следующие равенства

где C7M - максимальная суммарная емкость между секциями первого 25 электрода четвертого 16 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров;
C8M - максимальная суммарная емкость между секциями первого 27 электрода пятого 17 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров;
C9M - максимальная суммарная емкость между секциями первого 29 электрода шестого 18 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров;
C10M - максимальная суммарная емкость между секциями второго 26 электрода четвертого 16 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров;
C11M - максимальная суммарная емкость между секциями второго 28 электрода пятого 17 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров;
C12M - максимальная суммарная емкость между секциями второго 30 электрода шестого 18 колебательного контура и секциями общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров.
Введем следующие обозначения в равенства (10), (11), (12), (16), (17) и (18)






Радиальную ширину секций общего электрода 32 четвертого 16, пятого 17 и шестого 18 колебательных контуров выбирают таким образом, чтобы емкости, входящие в равенства (21) и (24), были близки между собой.
Формулы (7), (8) и (9) с учетом равенств (19), (20) и (21) в зависимости от величины углового перемещения ротора 1 относительно статора 2 (см. фиг.9) можно представить в виде:
В диапазоне измерения от 0° до 9°



В диапазоне измерения от 15° до 24°



В диапазоне измерения от 30° до 39°



Вычислительное устройство измерительной схемы 9, в зависимости от величины углового перемещения ротора 1 относительно статора 2 (см. фиг.9), вычисляет следующие выражения:
В диапазоне измерения от 0° до 9°
В диапазоне измерения от 15° до 24°

В диапазоне измерения от 30° до 39°

Выражения (34), (35) и (36) являются мерой измерения углового перемещения в вышеуказанных диапазонах измерения и однозначно определяют угловое перемещение ротора 1 относительно статора 2. Функциональную зависимость между угловым перемещением ротора 1 относительно статора 2 и выражениями (34), (35) и (36) определяют предварительной градуировкой (калибровкой).
Вычислительное устройство измерительной схемы 9 производит вычисление выражений

 или
или

через каждые 45 градусов углового перемещения ротора 1 относительно статора 2 в соответствующем диапазоне измерения.
Формулы (13), (14) и (15) с учетом равенств (22), (23) и (24) в зависимости от величины углового перемещения ротора 1 относительно статора 2 (см. фиг.10) можно представить в виде:
В диапазоне измерения от 7,5° до 16,5°



В диапазоне измерения от 22,5° до 31,5°



В диапазоне измерения от 37,5° до 46,5°



Вычислительное устройство измерительной схемы 9, в зависимости от величины углового перемещения ротора 1 относительно статора 2 (см. фиг.10), вычисляет следующие выражения:
В диапазоне измерения от 7,5° до 16,5°
В диапазоне измерения от 22,5° до 31,5°

В диапазоне измерения от 37,5° до 46,5°

Выражения (49), (50) и (51) являются мерой измерения углового перемещения в вышеуказанных диапазонах измерения и однозначно определяют угловое перемещение ротора 1 относительно статора 2. Функциональную зависимость между угловым перемещением ротора 1 относительно статора 2 и выражениями (49), (50) и (51) определяют предварительной градуировкой.
Вычислительное устройство измерительной схемы 9 производит вычисление выражений

 или
или

через каждые 45 градусов углового перемещения ротора 1 относительно статора 2 в соответствующем диапазоне измерения.
Вычислительное устройство измерительной схемы 9 вычисляет угловые скорость и ускорение объекта соответственно однократным и двукратным дифференцированием углового перемещения.
Таким образом, в предлагаемом емкостном датчике для измерения параметров углового движения объектов происходит уменьшение влияния на результат измерения угловых перемещения, скорости и ускорения изменений частоты задающего генератора (например, от температуры) вычислительного устройства измерительной схемы 9, температуры и состава внешней среды, расстояния между ротором 1 и статором 2, а также непараллельности плоскостей и несоосности ротора 1 и статора 2, что повышает точность измерения.
Например, при температурном расширении проводников первого 13, второго 14 и третьего 15 (или четвертого 16, пятого 17 и шестого 18) колебательных контуров вследствие изменения температуры внешней среды происходит изменение практически пропорционально постоянных составляющих емкостей и практически пропорционально суммарных емкостей между секциями электродов указанных колебательных контуров. Вследствие этого происходит уменьшение влияния на результат измерения угловых перемещения, скорости и ускорения температурного расширения проводников первого 13, второго 14 и третьего 15 (или четвертого 16, пятого 17 и шестого 18) колебательных контуров.
Промышленная применимость
Предлагаемый емкостный датчик для измерения параметров углового движения объектов может быть изготовлен из доступных элементов и материалов в условиях радиотехнического производства. Найдет широкое применение в устройствах измерительной техники, специалистам будут очевидны и другие частные случаи автоматизации измерения угловых перемещений, скоростей и ускорений. Данное описание и примеры рассматриваются как материал, иллюстрирующий изобретение, сущность которого и объем патентных притязаний определены в нижеследующей формуле изобретения, совокупностью существенных признаков и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2445633C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2465605C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2466411C1 |
| ИНКРЕМЕНТНЫЙ ЕМКОСТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2010 |
|
RU2427794C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2516207C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2491555C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2002 |
|
RU2207498C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2574321C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНЫХ ХАРАКТЕРИСТИК СРЕД И ФИЗИЧЕСКИХ ВЕЛИЧИН ПЛОТНОСТИ И ДАВЛЕНИЯ | 1998 |
|
RU2149390C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 1999 |
|
RU2163358C2 |
Изобретение относится к области измерительной техники. Емкостный датчик содержит ротор и статор, выполненные в виде двух дисков из диэлектрического материала, шесть катушек индуктивности и измерительную схему. Ротор установлен на подвесе в опоре. Датчик дополнительно снабжен шестью колебательными контурами, гальванически развязанными от измерительной схемы, которые содержат шесть катушек индуктивности, а также секциями шести электродов трех колебательных контуров, расположенных и равномерно распределенных по окружности на стороне статора, обращенной к ротору, секциями шести электродов трех колебательных контуров, расположенных и равномерно распределенных по окружности меньшего диаметра на стороне статора, обращенной к ротору, секциями общего электрода трех колебательных контуров, расположенных и равномерно распределенных по окружности на стороне ротора, обращенной к статору, над секциями шести электродов трех колебательных контуров, секциями общего электрода трех колебательных контуров, расположенных и равномерно распределенных по окружности меньшего диаметра на стороне ротора, обращенной к статору, над секциями шести электродов трех колебательных контуров, а измерительная схема включает шесть катушек индуктивности подкачки энергии в шесть колебательных контуров и шесть катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров. Технический результат заключается в повышении точности и чувствительности измерений. 2 з.п. ф-лы, 11 ил.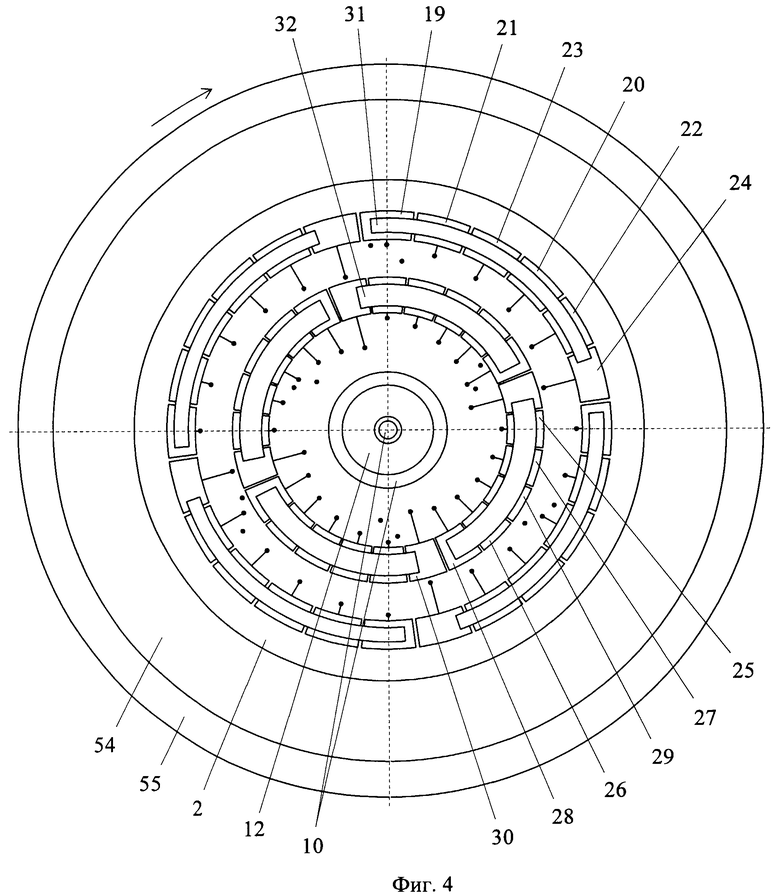
1. Емкостный датчик для измерения параметров углового движения объектов, содержащий ротор и статор, выполненные в виде двух дисков из диэлектрического материала, шесть катушек индуктивности и измерительную схему, отличающийся тем, что ротор установлен на подвесе в опоре и выполняет функцию инерционной массы, при этом датчик дополнительно снабжен шестью колебательными контурами, гальванически развязанными от измерительной схемы, которые содержат шесть катушек индуктивности, а также секциями шести электродов трех колебательных контуров, расположенных и равномерно распределенных по окружности на стороне статора, обращенной к ротору, секциями шести электродов трех колебательных контуров, расположенных и равномерно распределенных по окружности меньшего диаметра на стороне статора, обращенной к ротору, секциями общего электрода трех колебательных контуров, расположенных и равномерно распределенных по окружности на стороне ротора, обращенной к статору, над секциями шести электродов трех колебательных контуров, секциями общего электрода трех колебательных контуров, расположенных и равномерно распределенных по окружности меньшего диаметра на стороне ротора, обращенной к статору, над секциями шести электродов трех колебательных контуров, а измерительная схема включает шесть катушек индуктивности подкачки энергии в шесть колебательных контуров и шесть катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров.
2. Датчик по п.1, отличающийся тем, что шесть катушек индуктивности шести колебательных контуров, шесть катушек индуктивности подкачки энергии в шесть колебательных контуров и шесть катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров измерительной схемы выполнены намоткой проводом на шести диэлектрических каркасах, которые размещены по окружности на внешней стороне статора.
3. Датчик по п.1, отличающийся тем, что опора подвеса ротора выполнена в виде двух прецизионных камневых втулок из сапфира, рубина или искусственного камня.
| Устройство для измерения угловых скоростей и перемещений | 1977 |
|
SU618679A1 |
| US 5598153 A, 28.01.1997 | |||
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2289785C1 |
| DE 3711062 A1, 20.10.1988. | |||

