Изобретение относится к измерительной технике и может быть использовано, например, для измерения углов поворота механических устройств.
Известен емкостный датчик угловых перемещений (a.c. SU №872944, заявл. 08.10.79, опубл. 15.10.81), содержащий многопластинчатый статор и многопластинчатый ротор, выполненный из диэлектрического материала. Ротор закреплен на оси маятникового подвеса.
Недостатком датчика является небольшой угол измерения - не более 180°, а также узкий диапазон использования, так как датчик можно использовать только для измерения наклона плоскости.
Наиболее близким аналогом, принятым за прототип, является емкостный датчик для измерения угловых перемещений (а.с. SU №968599, заявл. 09.09.80, опубл. 23.10.82), содержащий соосно установленные и неподвижно закрепленные в корпусе параллельные пластины статора, между которыми размещена пластина ротора, неподвижно закрепленная на вращающемся валу.
Однако данный датчик не дает однозначности при полном обороте вала, т.к. при существующем диапазоне измерений от 0 до 180° получают одно и то же значение измеряемого параметра при двух угловых положениях. Кроме того, на параметры датчика влияет окружающая среда - температура, влажность, снижая точность измерения.
Задачей изобретения является расширение диапазона измерений угловых перемещений от 0° до 360° и повышение точности измерений при изменении параметров окружающей среды - температуры от -40°С до +50°С, влажности до 80% при 25°С.
Задача решается следующим образом.
В емкостном датчике для измерения угловых перемещений, содержащем соосно установленные и неподвижно закрепленные в корпусе параллельные пластины статора, между которыми помещен ротор, неподвижно закрепленный на вращающемся валу, согласно изобретению, пластины статора установлены в количестве, по меньшей мере, двух и на каждой из пластин выполнен кольцеобразный металлический элемент, при этом на одной из пластин статора кольцеобразный металлический элемент выполнен сплошным, на другой - кольцеобразный металлический элемент выполнен в виде, по меньшей мере, трех секторов, а ротор выполнен в виде сектора диска, полностью перекрывающего один из секторов кольцеобразного металлического элемента статора.
Ротор может быть выполнен из диэлектрического или металлического материала.
На фиг.1 изображен емкостный датчик для измерения угловых перемещений, общий вид в разрезе (разрез А-А на фиг.2).
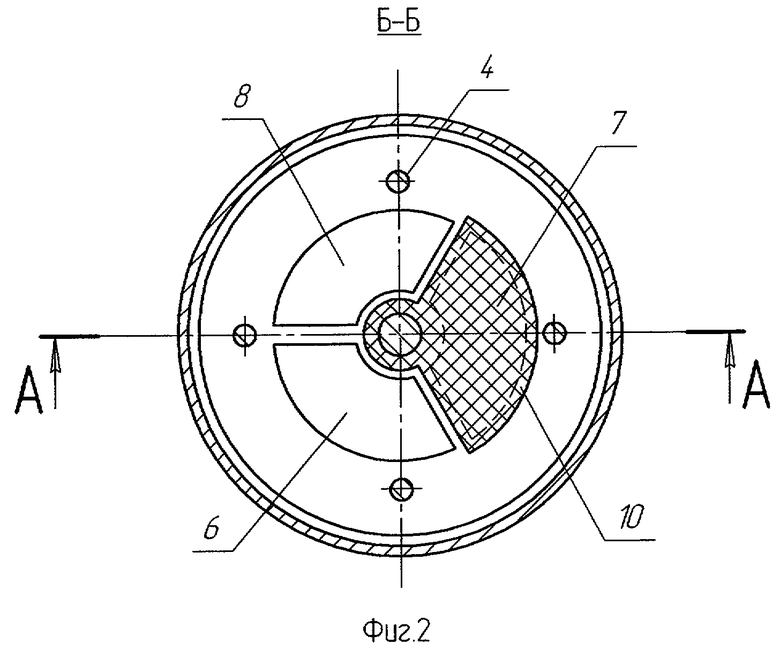
На фиг.2 - то же, разрез Б-Б на фиг.1.
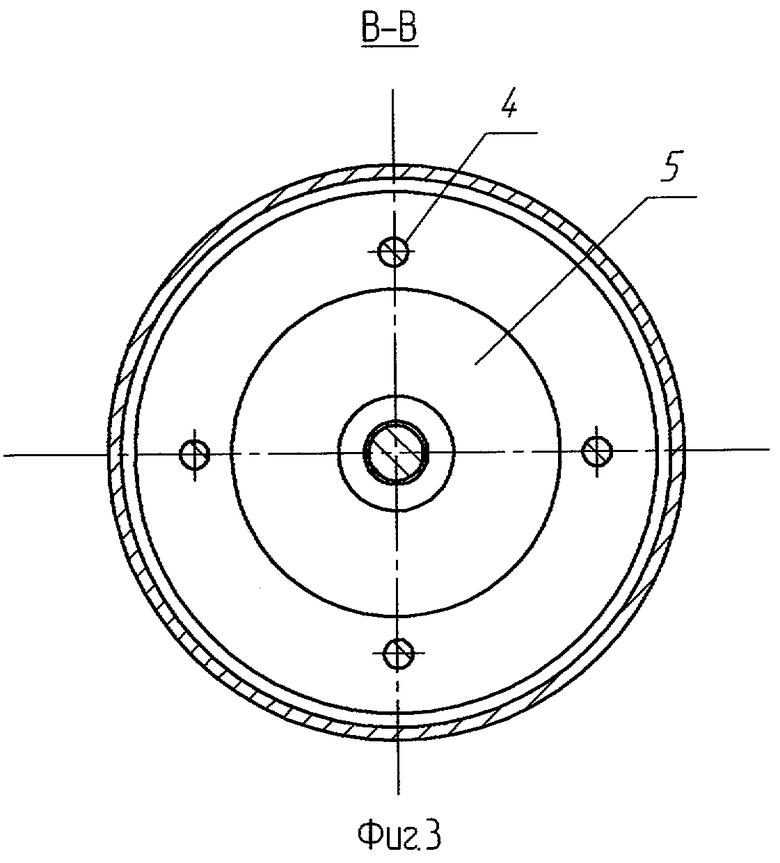
На фиг.3 - то же, разрез В-В на фиг 1.
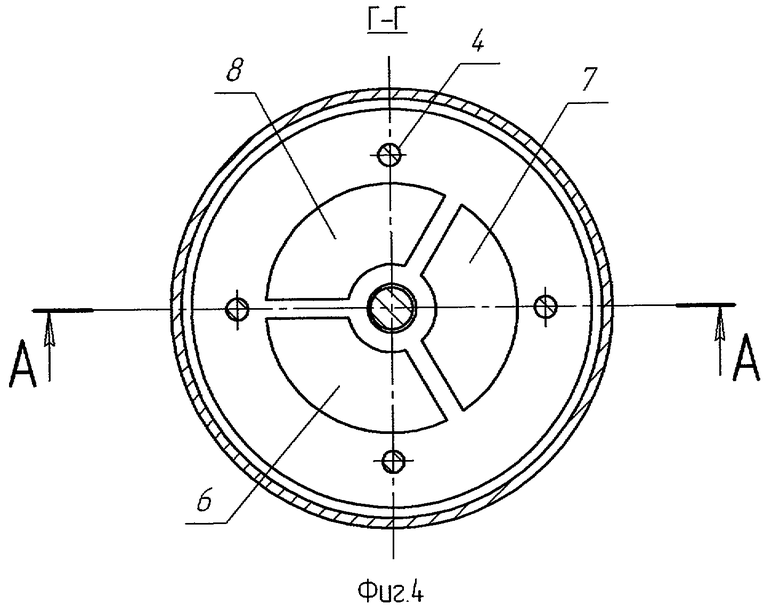
На фиг.4 - то же, разрез Г-Г на фиг.1.
Емкостный датчик для измерения угловых перемещений содержит, по меньшей мере, две параллельные пластины статора 1, 2, неподвижно закрепленные в корпусе 3 посредством элемента крепления 4. На каждой пластине 1, 2 статора выполнен металлический кольцеобразный элемент, например, методом травления. На пластине 1 статора металлический кольцеобразный элемент 5 выполнен сплошным, а на пластине 2 статора металлический кольцеобразный элемент выполнен в виде, по меньшей мере, трех секторов 6, 7, 8.
Между пластинами 1, 2 статора установлен неподвижно закрепленный на вращающемся валу 9 ротор 10, выполненный в виде сектора диска, по размеру полностью перекрывающего один из секторов 6, 7, 8 кольцеобразного элемента 5 статора. При этом ротор 10 выполнен предпочтительно из диэлектрического материала, например из стеклотекстолита. Ротор 10 может быть выполнен из металлического материала. Каждый сектор 6, 7, 8 пластины 2 статора образует вместе с кольцеобразным металлическим элементом 5 пластины 1 статора конденсатор с емкостями соответственно C1, C2, С3. Пластины 1, 2 статора изготовлены из фольгированного стеклотекстолита.
Устройство работает следующим образом.
Ротор 10, неподвижно закрепленный на валу 9, при вращении вала в любой момент времени частично перекрывает два сектора, например, 6, 7 пластины 2 статора, при этом один сектор, например, 8 остается не перекрытым. По отношению емкостей двух частично перекрытых секторов определяется угол положения вала 9 в любой момент времени. При повороте вала 9 ротор 10 перемещается относительно секторов 6, 7, 8 пластины 2 статора. При этом емкость C1 одного сектора 6 уменьшается, а емкость C2 другого сектора 7 увеличивается. Величина изменения емкостей пропорциональна углу поворота ротора 10.
В каждый момент времени снимают показания емкостей всех трех секторов 6, 7, 8, соответственно С1, С2, С3. По значению емкости сектора 8 С3, не перекрытого ротором 10, определяют коэффициент изменения значения емкости сектора 8 под влиянием окружающей среды (температура, влажность) относительно начальной емкости сектора 8 С30 (при t°=20°C). Учитывая коэффициент изменения емкости сектора 8, определяют изменения емкости для других секторов и вносят коррективы в измеряемые параметры. Измерение емкости каждого сектора 6, 7, 8 осуществляется любыми известными способами, например:
- метод прямого измерения напряжения при стабилизированном токе за определенный период времени;
- метод, основанный на измерении частоты LC генератора и ее изменении при подключении к контуру генератора с помощью реле К1 образцовой емкости С2эт. Зная величину этой емкости, нетрудно вычислить параметры LC контура генератора. При этом емкость контура складывается из емкости собственно конденсатора, паразитной емкости катушки индуктивности и емкости монтажа;
- использование интегральной микросхемы преобразователей CDC (преобразователь емкость - цифровой код)
Конструкция предложенного емкостного датчика позволяет:
1. Определять однозначно измеряемый параметр - угол поворота вала в диапазоне от 0 до 360 градусов.
2. Повышается точность измерения за счет учета влияния температуры и влажности окружающей среды на емкостные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостный датчик угловых перемещений | 1979 |
|
SU872944A1 |
| Емкостной абсолютный преобразователь угловых перемещений | 2021 |
|
RU2773267C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2445633C1 |
| Устройство бесконтактного определения вязкости образцов металлических расплавов | 2017 |
|
RU2668958C1 |
| ИНДУКТИВНО-ЕМКОСТНАЯ ЭЛЕКТРОМАГНИТНАЯ МАШИНА | 2010 |
|
RU2426217C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2442991C1 |
| Емкостной абсолютный преобразователь угловых перемещений | 2019 |
|
RU2724150C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2148788C1 |
| Индуктивный абсолютный преобразователь угловых перемещений | 2021 |
|
RU2788423C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2158902C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения углов поворота механических устройств. Сущность: датчик содержит, по меньшей мере, две соосно установленные и неподвижно закрепленные в корпусе параллельные пластины статора. Между ними помещен ротор, неподвижно закрепленный на вращающемся валу. На одной из пластин статора выполнен сплошной кольцеобразный металлический элемент. На другой пластине статора выполнен кольцевой металлический элемент в виде, по меньшей мере, трех секторов. Ротор выполнен предпочтительно из диэлектрического материала в виде сектора диска, полностью перекрывающего один из секторов кольцеобразного металлического элемента статора. Технический результат: расширение диапазона измерений, повышение точности за счет возможности учета влияния температуры и влажности окружающей среды. 2 з.п. ф-лы, 4 ил.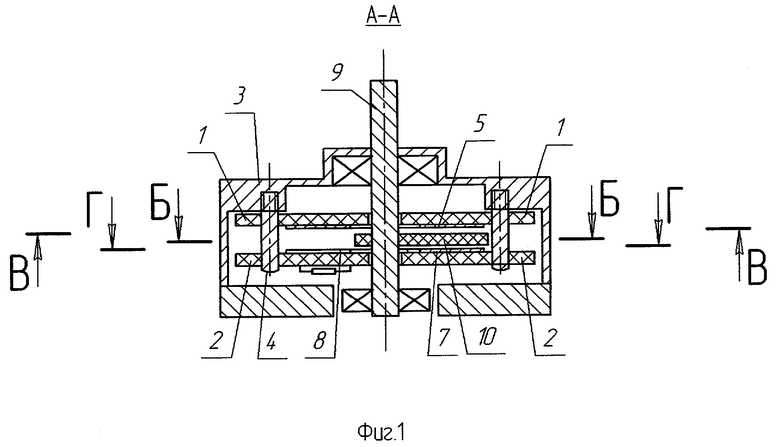
| Устройство для измерения угловых перемещений | 1980 |
|
SU968599A1 |
| Емкостной датчик угловых перемещений | 1988 |
|
SU1596210A2 |
| US 5598153 A, 28.01.1997 | |||
| DE 3711062 A1, 20.10.1988 | |||
| DE 4424538 A1, 19.01.1995. | |||

