Изобретение предназначено для туризма, для активного отдыха на воде и в качестве буксира плавсредств. Известен ряд устройств, предназначенных для активного отдыха на воде, в которых используется мускульная сила человека. К аналогу изобретения можно отнести устройство, содержащее установленный в подшипниках корпуса поперечно расположенный вал с гребными поворотными плицами, выполненными в виде маятников, подвешенных к валу (RU №2081029, кл. В63Н 1/04, 5/02 1997). Предназначен для быстроходных судов, поэтому ограничивается использования для малых плавсредств.
К прототипу изобретения можно отнести устройство рабочего органа, содержащее раму, на которой закреплен рабочий орган с установленными на осях лопастями между несущим колесом и опорным кольцом, оси расположены выше центра тяжести с возможностью поворота лопастей силой их тяжести, рабочий угол лопастей устанавливается при загрузке и выгрузке автоматически от воздействия массы и ограничителей. (RU №2341613, кл. Е01Н 5/04, 2007).
Техническим эффектом данного изобретения является совокупность отличительных существенных признаков, создающих расширение возможностей для массового использования для туризма, для активного отдыха на воде и в качестве буксира плавсредств.
Заявленный технический эффект достигается тем, что рама выполнена П-образной формы. На раме, по бортам транспорта, закреплены плавательные средства и рабочий орган движения, состоящий из лопастей, установленных на осях и которые закреплены на бесконечных, например, ремнях. Ремни расположены по бортам рабочего органа движения на передних и задних шкивах. Лопасти постоянно находятся в вертикальном положении силой их тяжести, что обеспечивает лопастям в нерабочей зоне нахождение во внутреннем пространстве рабочего органа, увеличивая удобство эксплуатации за счет уменьшения его наружных габаритов с возможностью закрыть настилом, обеспечивая защиту от травмирования двигающимися частями. При действии рабочего органа, после прохождения лопастями изгиба по окружностям передних шкивов, лопасти погружаются в рабочую зону воды, где занимают рабочее положение, воздействием направляющих на полки лопастей, расположенных перпендикулярно рабочим поверхностям лопастей, что обеспечивает толкание лопастями транспортное средство до поочередного выхода лопастей из рабочей зоны воды и зоны действия направляющих, что автоматически прекращает воздействие лопастей на массу воды в вертикальном направлении не затрачивать физическую энергию оператором. Передвижение плавающего мускульного транспорта осуществляется ножным приводом, состоящим из педалей с полками, обеспечивающими удержание ног на педалях, педали смонтированы вместе с толкателями, которые перемещаются по направляющим. На конце толкателей, на осях, установлены собачки, воздействующие попеременно на головки лопастей возвратно-поступательным движением ног, толкающих верхний ряд лопастей вперед. Нижний ряд лопастей получает рабочий ход, отталкиваясь от массы воды, и создает движение транспортному средству. Во время рабочего хода педалей и толкателей собачки, силой своей тяжести, фиксируются от вращения упором и воздействуют на головки лопастей. При обратном ходе педалей и толкателей собачки, воздействием головок лопастей, поворачиваются вокруг своих осей в обратном направлении и устанавливаются в исходное положение. Взаимодействие работы механизма ножного привода, левого и правого расположения и регулирование шагов лопастей осуществляется синхронизатором, состоящим из коромысла и тяг, соединенных между собой и с толкателями шарнирами, что обеспечивает синхронность действий педалей с толкателями, равенством углов одновременного поворота коромысла и тяг левого и правого рядов ножного привода. Опорами рук оператора являются поручни. При необходимости, возможен состав двух и более транспортных средств, соединенных между собой сцепным приспособлением, например карабинами. Шкивы выполнены из эластичных кольцевых пневматических накаченных камер, установленных на ступицах с осями. Плавательное средство состоит из отдельных емкостей, герметично закрытых с рабочим телом, например, воздухом и соединенных в блоки, а блоки составлены в форму плавательного средства, упакованного оболочкой.
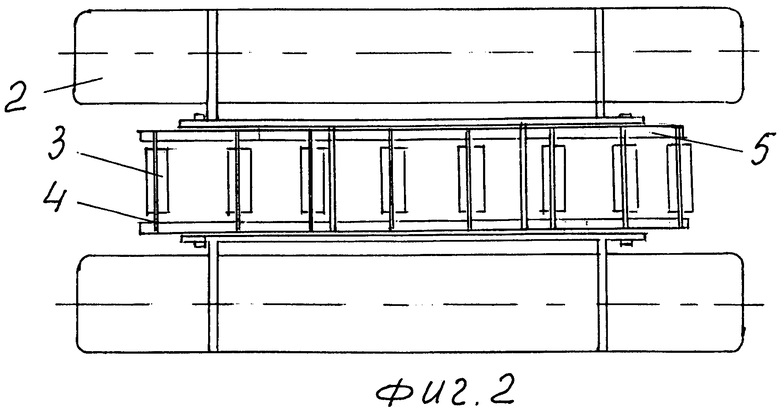
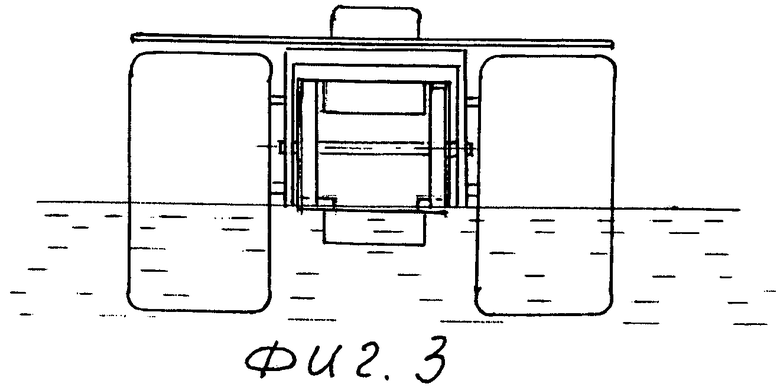
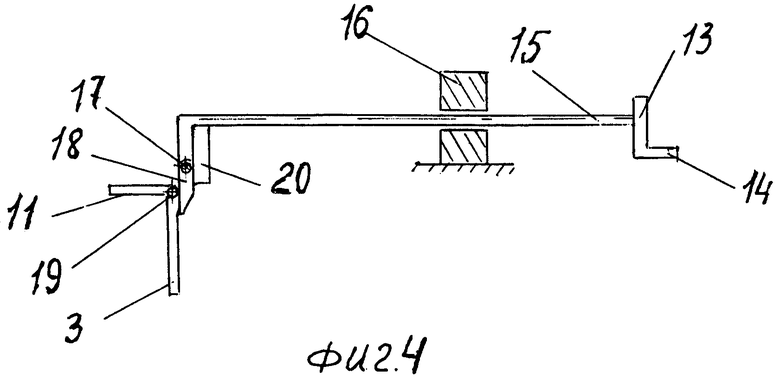
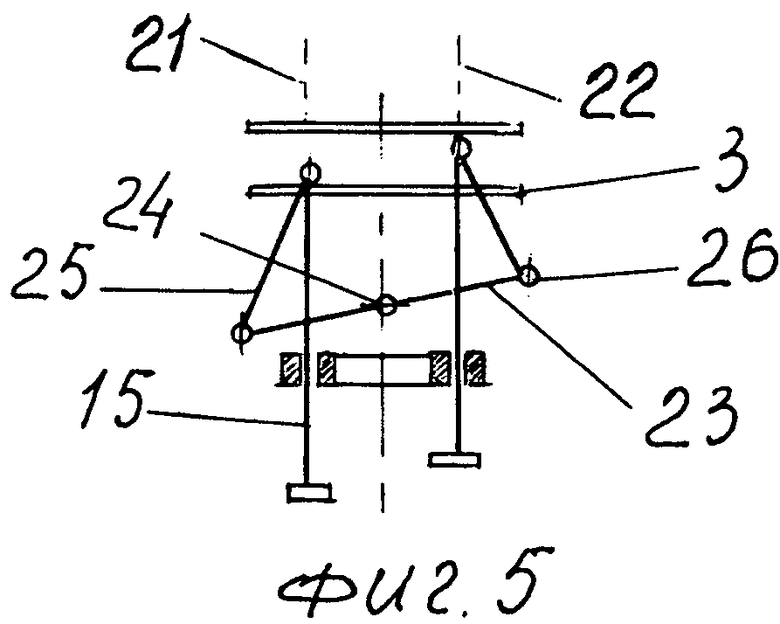
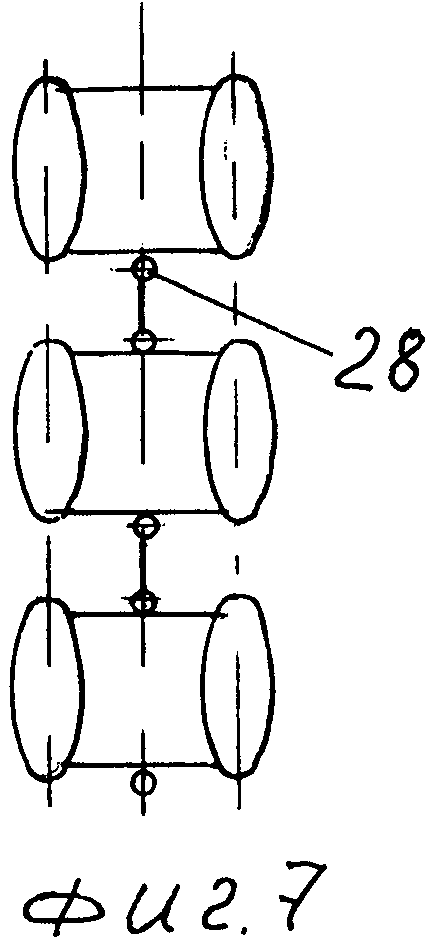
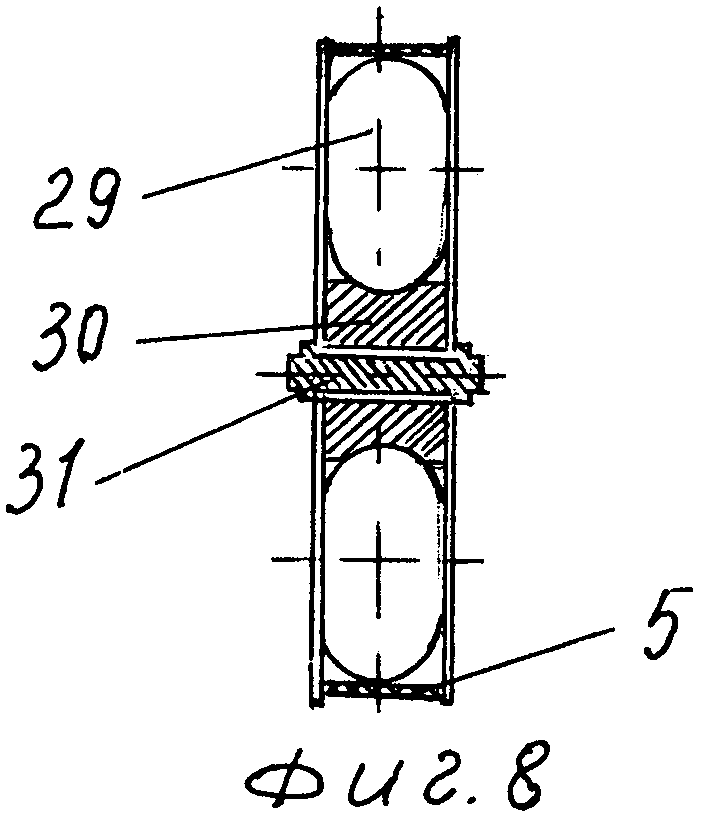
На фиг.1 изображен плавающий мускульный транспорт без плавательного средства, вид сбоку. На фиг.2 изображен плавающий мускульный транспорт, вид сверху без настила. На фиг.3 изображен плавающий мускульный транспорт, вид сзади. На фиг.4 изображен ножной привод в режиме воздействия собачкой на лопасть, вид сбоку. На фиг.5 изображена схема взаимодействия деталей синхронизатора ножного привода левого и правого рядов транспорта. На фиг.6 изображено плавательное средство, состоящее из отдельных емкостей, соединенных в блоки и составленных в форму плавательного средства, упакованного оболочкой. На фиг.7 изображен состав плавательных единиц, состоящий из буксира и несамоходных плавательных средств. На фиг.8 изображен шкив с пневматической камерой, установленной на ступице и оси.
Плавающий мускульный транспорт содержит раму 1, выполненную П-образной формы. На раме 1, по бортам транспорта, закреплены плавательные средства 2. Рабочий орган движения состоит из лопастей 3, установленных на осях 4 и которые закреплены на бесконечных ремнях 5. Ремни 5 расположены по бортам рабочего органа движения на передних 6 и задних 7 шкивах 8. Лопасти 3 постоянно находятся в вертикальном положении силой своей тяжести, что обеспечивает лопастям 3 в нерабочей зоне нахождение во внутреннем пространстве 9 рабочего органа движения, обеспечивая удобство эксплуатации за счет уменьшения наружных габаритов и с возможностью закрыть внутреннее пространство 9 настилом 10, обеспечивая защиту от травмирования двигающимися частями. В рабочем положении лопасти 3 с полками 11 располагаются под направляющими 12. Полки 11 лопастей 3 расположены перпендикулярно рабочим поверхностям лопастей 3. Передвижение плавучего мускульного транспорта осуществляется ножным приводом, состоящим из педалей 13 с полками 14, обеспечивающими удержание ног на педалях 13. Педали 13 смонтированы с толкателями 15, которые перемещаются по направляющим 16. На конце толкателей 15 на осях 17 установлены собачки 18, воздействующие попеременно на головки 19 лопастей 3. Во время рабочего хода педалей 13 и толкателей 15 собачки 18 силой своей тяжести фиксируются от вращения упором 20. Взаимодействие работы механизма ножного привода левого 21 и правого 22 расположения и регулирование шагов лопастей осуществляется синхронизатором, состоящим из коромысла 23, установленного на оси 24, и тяг 25, соединенных между собой и с толкателями 15 шарнирами 26. Опорами рук оператора являются поручни 27.
Состав двух и более транспортных средств между собой обеспечивается сцепным приспособлением 28.
Шкивы 8 выполнены из эластичных кольцевых пневматических накаченных камер 29, установленных на ступицах 30 с осями 31.
Плавательное средство состоит из отдельных емкостей 32, герметично закрытых с рабочим телом, например, воздухом и соединенных в блоки 33, а блоки 33 составлены в форму плавательного средства, упакованного оболочкой 34.
Плавающий мускульный транспорт работает следующим образом. Для движения транспортного средства оператор воздействует на педали 13 с полками 14. Полки 14 удерживают ноги оператора на педалях 13. Педали 13 воздействуют на толкатели 15, которые перемещаясь по направляющим 16, воздействуют попеременно на собачки 18. Во время рабочего хода педалей 13 и толкателей 15 собачки 18 силой своей тяжести поворачиваются вокруг осей 17 и фиксируются от вращения упором 20 и воздействуют на головки 19 лопастей 3 возвратно-поступательным движением ног, толкающих верхний ряд лопастей 3 вперед, а нижний ряд лопастей 3 получает рабочий ход и создает движение транспорту вперед. При обратном ходе педалей 13 и толкателей 15 собачки 18 воздействием головок 19 лопастей 3 поворачиваются вокруг осей 17 и устанавливаются в исходное положение. Взаимодействие работы механизма ножного привода левого 21 и правого 22 расположения и регулирование шагов лопастей 3 осуществляется синхронизатором в следующей последовательности. При нажатии оператором педали 13, например, правого расположения 22 толкатель 15 воздействует через шарниры 26 на тягу 25 и коромысло 23. Коромысло 23 поворачивается вокруг оси 24 и другим концом через шарниры 26 воздействует на привод левого расположения 21, на тягу 25, толкатель 15 и педаль 13. При воздействии оператора на педаль 13 левого расположения 21 ножной привод работает в последовательности, аналогичной правому расположению 22, обеспечивая синхронность действий педалей 13 с толкателями 15 за счет равенства углов одновременного поворота коромысла 23 и тяг 25 левого и правого рядов. При действии рабочего органа движения, после прохождения лопастями 3 изгиба по окружностям передних 6 шкивов 8, лопасти 3 погружаются в рабочую зону воды, где занимают рабочее положение, воздействием направляющих 12 на полки 11 лопастей 3, что обеспечивает толкание лопастями 3 транспорта вперед, до поочередного выхода лопастей 3 из рабочей зоны воды и зоны действия направляющих 12, прекращая автоматически воздействовать лопастями 3 на массу воды, обеспечивая эффективность по снижению физической нагрузки оператором. В рабочем положении оператор опирается руками о поручни 27. Пневматические камеры 29 выполняют роль дополнительных плавательных средств и используются для натяжения ремней 5, обеспечивая рабочий контакт между передними 6 и задними 7 шкивами 8. Плавательное средство состоит из отдельных емкостей 32. Выход из строя одной или нескольких емкостей 32 не повлияет на плавучесть транспорта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВАЮЩИЙ МУСКУЛЬНЫЙ ТРАНСПОРТ | 2013 |
|
RU2533777C2 |
| МУСКУЛЬНЫЙ С АККУМУЛИРОВАННОЙ ЭНЕРГИЕЙ ВОЗДУШНО-ВИНТОВОЙ ТРАНСПОРТ | 2012 |
|
RU2500546C1 |
| ТЯГОВАЯ МАШИНА С ПОЧВООБРАБАТЫВАЮЩИМИ ПРИЦЕПНЫМИ ОРУДИЯМИ, ПРИВОДИМЫМИ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 2013 |
|
RU2520851C1 |
| МУСКУЛОКАТ | 2012 |
|
RU2509024C1 |
| ТРАНСПОРТ ПОВЫШЕННОЙ ПРОХОДИМОСТИ С НАВЕСНЫМ ОБОРУДОВАНИЕМ И НОЖНЫМ ПРИВОДОМ | 2013 |
|
RU2544049C2 |
| СНЕГОУБОРОЧНОЕ УСТРОЙСТВО | 2007 |
|
RU2341613C1 |
| Транспортное средство Арзамасцева с ножным и механическим приводом накопительной энергии | 2019 |
|
RU2749430C2 |
| Мускулокат Арзамасцева производит энергию и двигается пневомоторными колесами | 2019 |
|
RU2705738C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКОЕ СООРУЖЕНИЕ | 2012 |
|
RU2575595C2 |
| СНЕГОУБОРОЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2460841C2 |

Изобретение относится к водному транспорту. Плавающий мускульный транспорт содержит раму, рабочий орган движения, плавательные средства, ножной привод. Рама выполнена П-образной формы. На раме, по бортам транспорта, закреплены плавательные средства и рабочий орган движения. Рабочий орган состоит из лопастей, установленных на осях и закрепленных на бесконечных ремнях. Ремни расположены по бортам рабочего органа движения на передних и задних шкивах. Лопасти находятся в вертикальном положении силой их тяжести, что обеспечивает лопастям в нерабочей зоне нахождение во внутреннем пространстве рабочего органа. Ножной привод состоит из педалей с полками. Полки обеспечивают удержание ног на педалях. Педали смонтированы вместе с толкателями, которые перемещаются по направляющим. На конце толкателей, на осях, установлены собачки, воздействующие попеременно на головки лопастей возвратно-поступательным движением ног. Во время рабочего хода педалей и толкателей собачки силой своей тяжести фиксируются от вращения упором и воздействуют на головки лопастей. Взаимодействие работы механизма ножного привода левого и правого расположения и регулирование шагов лопастей осуществляется синхронизатором. Синхронизатор состоит из коромысла и тяг, соединенных между собой и с толкателями шарнирами. Опорами рук оператора являются поручни. Достигается расширение возможностей для активного отдыха на воде и в качестве буксира плавсредств. 2 з.п. ф-лы, 8 ил.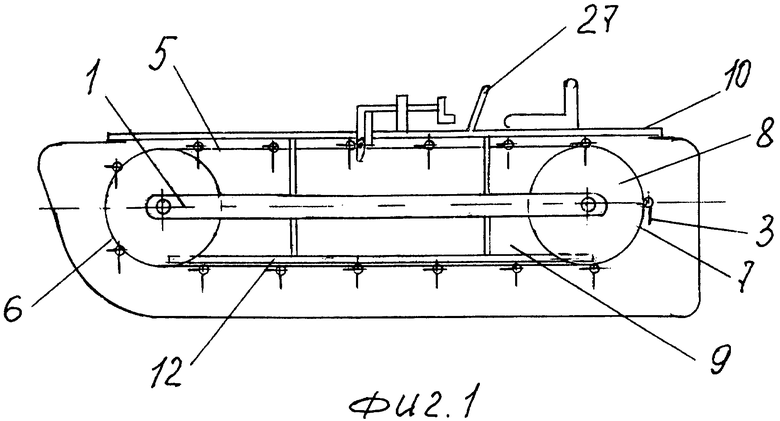
1. Плавающий мускульный транспорт, содержащий раму, на которой закреплен рабочий орган с установленными на осях лопастями между несущим колесом и опорным кольцом, оси расположены выше центра тяжести с возможностью поворота лопастей силой их тяжести, рабочий угол лопастей устанавливается при загрузке и выгрузке автоматически от воздействия массы и ограничителей, отличающийся тем, что рама выполнена П-образной формы, на раме по бортам транспорта закреплены плавательные средства и рабочий орган движения, состоящий из лопастей, установленных на осях и которые закреплены на бесконечных, например, ремнях, ремни расположены по бортам рабочего органа движения на передних и задних шкивах, лопасти постоянно находятся в вертикальном положении силой их тяжести, что обеспечивает лопастям в нерабочей зоне нахождение во внутреннем пространстве рабочего органа, увеличивая удобство эксплуатации за счет уменьшения его наружных габаритов с возможностью закрыть настилом, обеспечивая защиту от травмирования двигающимися частями при действии рабочего органа, после прохождения лопастями изгиба по окружностям передних шкивов лопасти погружаются в рабочую зону воды, где занимают рабочее положение воздействием направляющих на полки лопастей, расположенных перпендикулярно рабочим поверхностям лопастей, что обеспечивает толкание лопастями транспортного средства до поочередного выхода лопастей из рабочей зоны воды и зоны действия направляющих, что автоматически прекращает воздействие лопастей на массу воды в вертикальном направлении, не затрачивает физическую энергию оператора, а передвижение плавающего мускульного транспорта осуществляется ножным приводом, состоящим из педалей с полками, обеспечивающими удержание ног на педалях, педали смонтированы вместе с толкателями, которые перемещаются по направляющим, на концах толкателей на осях установлены собачки, воздействующие попеременно на головки лопастей возвратно-поступательным движением ног, толкающих верхний ряд лопастей вперед, а нижний ряд лопастей получает рабочий ход, отталкиваясь от массы воды, и создает движение транспортному средству, во время рабочего хода педалей и толкателей собачки силой своей тяжести фиксируются от вращения упором и воздействуют на головки лопастей, при обратном ходе педалей и толкателей собачки воздействием головок лопастей поворачиваются вокруг своих осей в обратном направлении и устанавливаются в исходное положение, а взаимодействие работы механизма ножного привода левого и правого расположения и регулирование шагов лопастей осуществляется синхронизатором, состоящим из коромысла и тяг, соединенных между собой и с толкателями шарнирами, обеспечивающим синхронность действий педалей с толкателями, равенство углов одновременного поворота коромысла и тяг левого и правого рядов ножного привода, опорами рук оператора являются поручни, при необходимости возможен состав двух и более транспортных средств, соединенных между собой сцепным приспособлением, например карабинами.
2. Плавающий мускульный транспорт по п.1, отличающийся тем, что шкивы выполнены из эластичных кольцевых пневматических накаченных камер, установленных на ступицах с осями.
3. Плавающий мускульный транспорт по п.1, отличающийся тем, что плавательное средство состоит из отдельных емкостей, герметично закрытых с рабочим телом, например воздухом, и соединенных в блоки, а блоки составлены в форму плавательного средства, упакованного оболочкой.
| DE 9115413 U1, 27.02.1992 | |||
| US 4772237 A, 20.09.1988 | |||
| ГРЕБНОЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВУЧЕГО СРЕДСТВА | 1992 |
|
RU2054360C1 |
| JP 8301189 A, 19.11.1996. | |||

