Мускулокат предназначен для активного отдыха и использования в качестве спортивного снаряда. Известен ряд, устройств, предназначенных для активного отдыха, в которых используется мускульная сила человека.
К прототипу изобретения можно отнести устройство, состоящее из рамы и ножного привода. Ножной привод имеет педали с толкателями, которые перемещаются по направляющим. На концах толкателей установлены собачки, воздействующие попеременно на головки лопастей возвратно-поступательным движением ног, толкающих верхний ряд лопастей вперед, опорные площадки для установки ног, передние и задние колеса, ножной привод и поручни. Патент RU 2443598, 2010 г.
Техническим эффектом данного изобретения является отличительные существенные признаки, создающие возможность активного отдыха для населения разного возраста и использования в качестве спортивного снаряда.
Заявленный технический эффект достигается тем, что мускулокат состоит из двух ходовых колес, установленных между собой в V-образном положении с минимальной базой между ходовыми колесами, создающей продольную путевую устойчивость, обеспечивающую движение по одной колее, увеличивающую управляемость и маневренность равновесием телом, рук и опорами ног водителя о дорожное полотно. V-образное положение ходовых колес обеспечивает достаточный обзор дорожного пути водителю. Ходовое колесо состоит из жесткой шины с беговой частью, которая обеспечивает смягчение контактов с дорожным покрытием и обода с кольцевой направляющей. Между шиной и ободом, по периметру, расположены буферы, например, из пористой резины. За счет жесткости шины снижается сопротивление качению ходового колеса о дорожное полотно, так как отсутствуют деформации беговой части шины на глубокое смятие. Расположение раздельных буферов не создают сопротивлений ходовому колесу при движении мускулоката, так как между буферами отсутствуют изгибы и трения внутри материала, способствующие снижению траты физических сил водителя на преодоление препятствий качению ходовых колес. На кольцевых направляющих ободов, на опорных роликах, установлена рама с поручнями, сиденьем, ножным приводом, подножками и брызговиками, установленными с возможностью размещения водителя во внутреннем пространстве мускулоката, что увеличивает боковую путевую устойчивость за счет смещения центра тяжести массы водителя и основной части массы рамы ниже осевой линии вращения ходовых колес и опорных роликов, позволяющих водителю находиться постоянно в вертикальном положении и при силовых действиях ног на педали. Передвижение мускулоката осуществляется ножным приводом толкающего типа, состоящим из педалей и толкателей. На конце толкателей, на осях, установлены толкающие ролики. Толкатели перемещаются по направляющим, расположенным на раме мускулоката. От рабочего хода педалей толкатели с толкающими роликами воздействуют попеременно на кольцевые направляющие ободов ходовых колес возвратно-поступательным движением ног водителя, отталкивающим движением от общей массы мускулоката и массы водителя вперед. При этом ходовые колеса воспринимают толкающую силу прямолинейного движения толкателей с толкающими роликами, преобразуя во вращение ходовых колес в сторону движения мускулоката. Вращение ходовых колес и движение мускулоката происходит за счет плеча, образующегося расстоянием от поверхности опоры ходового колеса на дорожное полотно до места приложения силы толкателем с толкающими роликами на обод ходового колеса. При этом между толкающими роликами и ходовым колесом и между опорными роликами и ходовым колесом действуют свободные связи, не препятствующие вращению ходового колеса, так как основная масса рамы с водителем располагается на опорных роликах с возможностью свободного движения по кольцевым направляющим и обеспечивая свободное вращение ходового колеса, а толкатели передают движущую силу ходовому колесу через вращающийся толкающий ролик, обеспечивающий свободное вращение ходовому колесу. При обратном свободном ходе педали с толкателем и толкающим роликом отводятся в исходное положение при помощи скобы, установленной на педали, действием ноги.
Ходовое колесо с борта мускулоката закрыто съемной мягкой пластиной, с возможностью принятия давления ветра, использующегося для движения мускулоката.
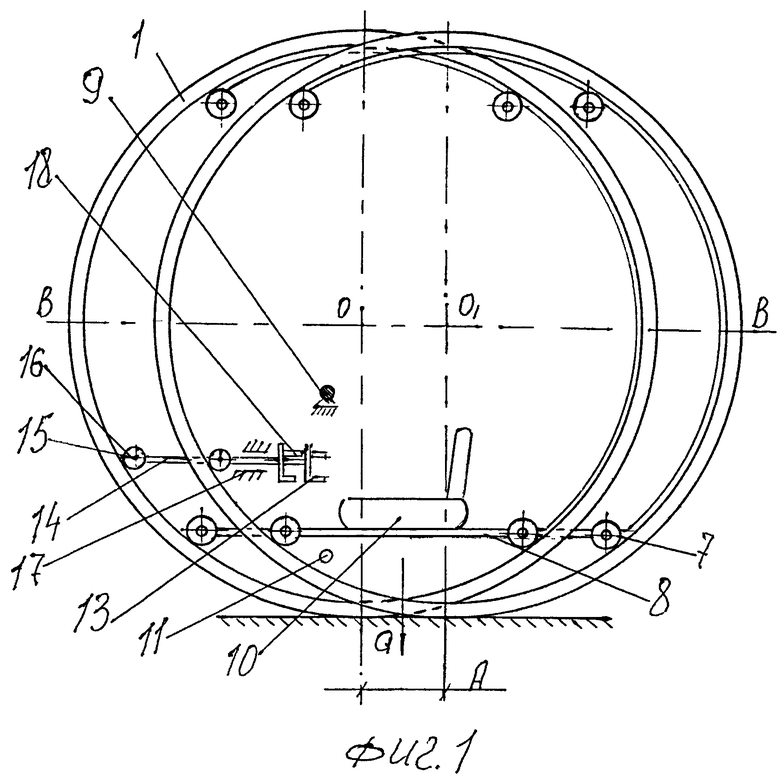
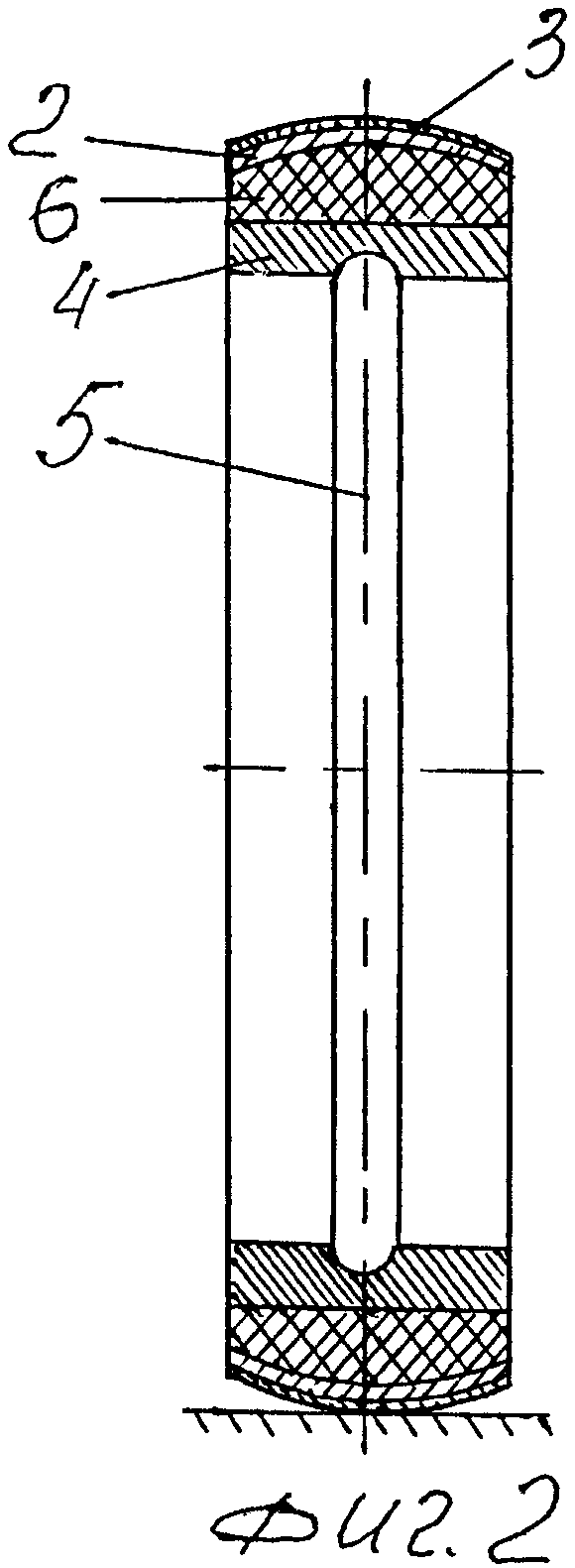
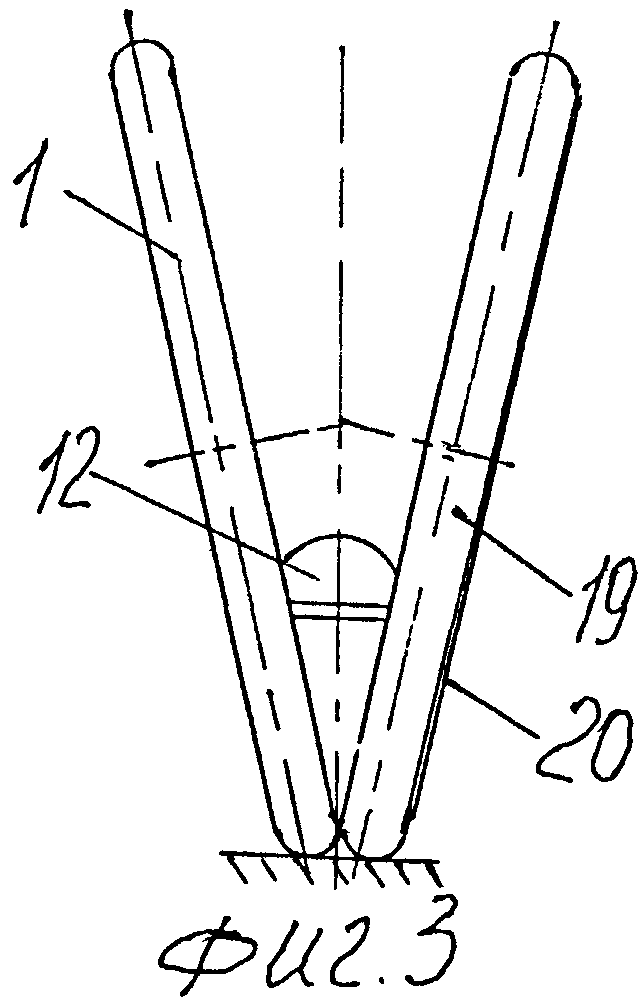
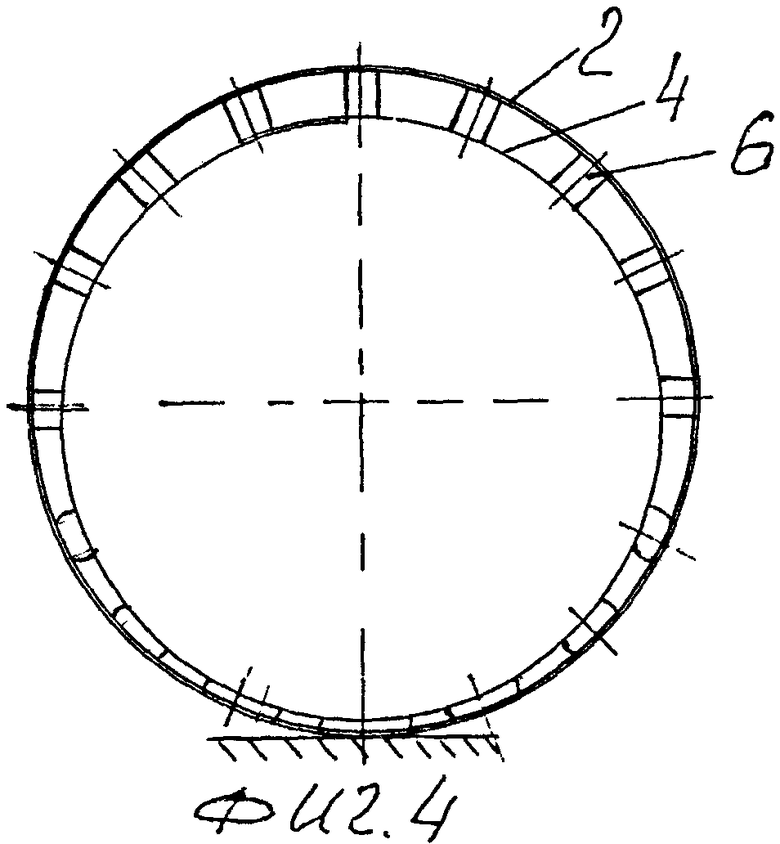
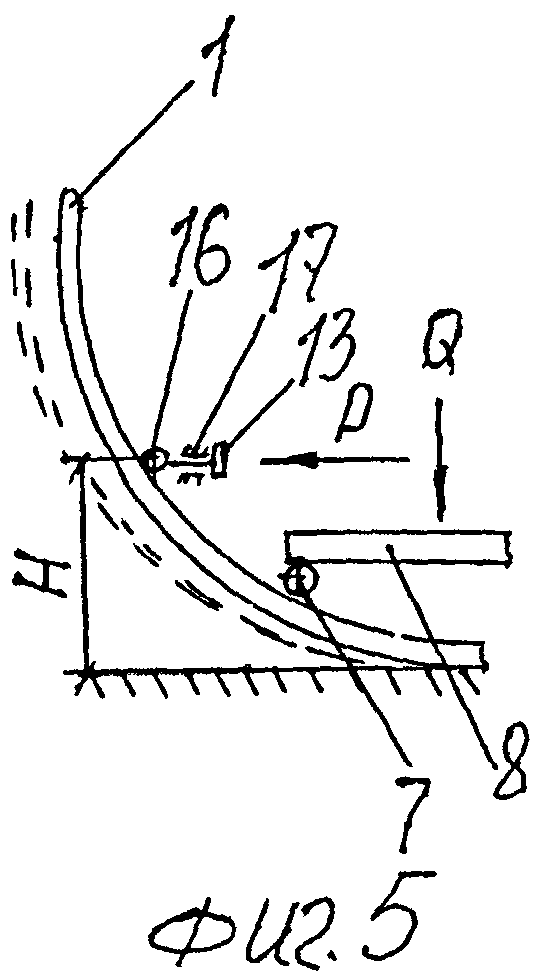
На фиг.1 изображен мускулокат, вид сбоку. Изображены: ходовые колеса, рама с опорными роликами, сиденье, поручни и ножной привод. Указана база А между ходовыми колесами и осевые линии O-O1 вращения ходовых колес. На фиг.2 изображено устройство ходового колеса, вид сбоку в разрезе. На фиг.3 изображено V-образное расположение ходовых колес, вид сзади. На фиг.4 изображено ходовое колесо при нагрузке на буферы, расположенные в нижней части ходового колеса, вид сбоку. На фиг.5 изображена схема взаимодействия механизма движения с вращением ходового колеса, зависящая: от плеча Н; от движущей силы P; от массы Q и ее положения в мускулокате.
Мускулокат состоит из двух ходовых колес 1, установленных между собой в V-образном положении с минимальной базой А между ходовыми колесами 1, с осевыми линиями О-О1 вращения ходовых колес 1. Ходовое колесо 1 состоит из жесткой шины 2 с беговой частью 3, которая обеспечивает смягчение контактов ходового колеса 1 с дорожным покрытием, и обода 4 с кольцевой направляющей 5. Между шиной 2 и ободом 4, по периметру, расположены буферы 6, например, из пористой резины. На кольцевых направляющих 5 ободов 4, на опорных роликах 7, установлена рама 8 с поручнями 9, сиденьем 10, подножками 11, брызговиками 12 и ножным приводом, установленными с возможностью размещения водителя во внутреннем пространстве мускулоката, что увеличивает боковую путевую устойчивость за счет расположения центра тяжести массы Q водителя с основной частью массы рамы 8 ниже осевых линий В-В вращения ходовых колес 1, позволяющих водителю находиться постоянно в вертикальном положении и при воздействии ногами на педали 13. Передвижение мускулоката осуществляется ножным приводом толкающего типа, состоящим из педалей 13 и толкателей 14. На конце толкателей 14, на осях 15, установлены толкающие ролики 16. Толкатели 14 перемещаются по направляющим 17, расположенным на раме 8 мускулоката. Во время рабочего хода педали 13 толкатель 14 с толкающими роликами 16 входит в рабочий контакт с кольцевой направляющей 5 обода 4. Вращение ходовых колес 1 и движение мускулоката происходит за счет плеча, образующегося расстоянием Н от поверхности опоры ходового колеса 1 на дорожное полотно до места приложения силы толкателем 14 с толкающим роликом 16 на кольцевую направляющую 5 обода 4 ходового колеса 1. При обратном свободном ходе педали 13 с толкателем 14 и толкающим роликом 16 отводятся в исходное положение при помощи скобы 18, установленной на педали 13, действием ноги.
Ходовое колесо 1 с борта 19 мускулоката закрыто съемной мягкой пластиной 20 с возможностью принятия давления ветра, использующегося для движения мускулоката.
Мускулокат работает следующим образом. До начала движения мускулоката водитель размещается во внутреннем пространстве мускулоката и опирается ногами на дорожное полотно, руками держится за поручни 9. Для движения мускулоката водитель воздействует возвратно-поступательным движением ног на педали 13. Педали 13 воздействуют на толкатели 14, которые, перемещаясь по направляющим 17, воздействуют попеременно на толкающие ролики 16. Во время рабочего хода педалей 13 и толкателей 14 толкающие ролики 16 воздействуют на кольцевые направляющие 5 ободов 4, толкающие ходовые колеса 1 вперед, создавая движение мускулокату вперед отталкивающим движением от общей массы мускулоката, воздействующей с массой водителя. От касания с кольцевой направляющей 5 обода 4 толкающие ролики 16 поворачиваются вокруг осей 15. Ходовые колеса 1 воспринимают толкающую силу P прямолинейного движения толкателей 14 с толкающими роликами 16, двигающимися по направляющим 17, преобразуя во вращение ходовые колеса 1 в сторону движения мускулоката. Вращение ходовых колес 1 и движение мускулоката происходит за счет плеча, образующегося расстоянием Н от поверхности опоры ходового колеса 1 на дорожное полотно до места приложения силы толкателем 14 с толкающим роликом 16 на кольцевую направляющую 5 обода 4 ходового колеса 1. При этом между толкающими роликами 16 и ходовым колесом 1 и между опорными роликами 7 и ходовым колесом 1 действуют свободные связи, не препятствующие вращению ходового колеса 1, так как основная масса рамы 8 с водителем располагается на опорных роликах 7 с возможностью свободного движения опорных роликов 7 по кольцевым направляющим 5 обода 4 и обеспечивая свободное вращение ходового колеса 1, а толкатели 14 передают движущую силу P ходовому колесу 1 через вращающийся толкающий ролик 16, обеспечивающий свободное вращение ходовому колесу 1. При обратном ходе педалей 13 толкатели 14 и толкающие ролики 16 отводятся в исходное положение при помощи скобы 18 и педали 13 действием ноги водителя. При движении мускулоката минимальная база А, между ходовыми колесами 1, создает продольную путевую устойчивость, обеспечивающую движение по одной колее, увеличивает управляемость и маневренность равновесием телом, рук и опорами ног водителя о дорожное полотно. Размещение водителя во внутреннем пространстве мускулоката увеличивает боковую путевую устойчивость за счет расположения центра тяжести массы Q водителя с основной частью массы рамы 8 ниже осевых линий В-В вращения ходовых колес 1, позволяющих водителю находиться постоянно в вертикальном положении и при воздействии ногами на педали 13. При движении мускулоката по дорожному полотну жесткость шины 2 с беговой частью 3 ходового колеса 1 обеспечивает смягчение контактов с дорожным покрытием. Глубокие неровности дорожного покрытия смягчаются буферами 6 от шины 2 на обод 4. За счет жесткости шины 2 снижается сопротивление качению ходового колеса 1 о дорожное полотно, так как отсутствуют деформации беговой части 3 шины 2 на глубокое смятие. Расположение раздельных буферов 6 не создает сопротивлений ходовому колесу 1 при движении мускулоката, так как между буферами 6 отсутствуют изгибы и трения внутри материала, способствующие снижению траты физических сил водителя на преодоление препятствий качению ходовых колес 1. V-образное положение ходовых колес 1 обеспечивает достаточный обзор дорожного пути водителю.
При использовании давления ветра для движения мускулоката на ходовое колесо 1 устанавливается съемная мягкая пластина 20.
Изобретение относится к области транспортных средств с мускульным приводом, в частности к мускулокату. Мускулокат состоит из двух ходовых колес, установленных между собой в V-образном положении с минимальной базой между ходовыми колесами. Ходовое колесо состоит из жесткой шины с беговой частью и обода с кольцевой направляющей. Между шиной и ободом, по периметру, расположены буферы. Буферы выполнены из пористой резины. На кольцевых направляющих ободов, на опорных роликах, установлена рама с поручнями, сиденьем, ножным приводом, подножками и брызговиками. Рама установлена с возможностью размещения водителя во внутреннем пространстве мускулоката. Передвижение мускулоката осуществляется ножным приводом толкающего типа. Привод состоит из педалей и толкателей, на конце толкателей, на осях, установлены толкающие ролики. От рабочего хода педалей толкатели с толкающими роликами воздействуют попеременно на кольцевые направляющие ободов ходовых колес возвратно-поступательным движением ног водителя. Ходовые колеса воспринимают толкающую силу прямолинейного движения толкателей с толкающими роликами, преобразуя во вращение ходовых колес в сторону движения мускулоката. При обратном свободном ходе педали с толкателем и толкающим роликом отводятся в исходное положение при помощи скобы, установленной на педали, действием ноги. При использовании давления ветра для движения мускулоката на ходовое колесо устанавливается съемная мягкая пластина. Достигается возможность использования мускулоката в качестве спортивного снаряда. 1 з.п. ф-лы, 5 ил.
1. Мускулокат, состоящий из рамы и ножного привода, ножной привод имеет педали с толкателями, которые перемещаются по направляющим, опорные площадки для установки ног, передние и задние колеса, ножной привод и поручни, отличающийся тем, что мускулокат состоит из двух ходовых колес, установленных между собой в V-образном положении с минимальной базой между ходовыми колесами, создающей продольную путевую устойчивость, что обеспечивает движение по одной колее, увеличивает управляемость и маневренность равновесием телом, рук и опорами ног водителя о дорожное полотно, V-образное положение ходовых колес обеспечивает достаточный обзор дорожного пути водителю, ходовое колесо состоит из жесткой шины с беговой частью, которая обеспечивает смягчение контактов с дорожным покрытием, и обода с кольцевой направляющей, а между шиной и ободом, по периметру, расположены буферы, например, из пористой резины, за счет жесткости шины снижается сопротивление качению ходового колеса о дорожное полотно, так как отсутствуют деформации беговой части шины на глубокое смятие, расположение раздельных буферов не создают сопротивлений ходовому колесу при движении мускулоката, так как между буферами отсутствуют изгибы и трения внутри материала, способствующие снижению траты физических сил водителя на преодоление препятствий качению ходовых колес, а на кольцевых направляющих ободов, на опорных роликах, установлена рама с поручнями, сиденьем, ножным приводом, подножками и брызговиками, установленными с возможностью размещения водителя во внутреннем пространстве мускулоката, что увеличивает боковую путевую устойчивость за счет расположения центра тяжести массы водителя с основной частью массы рамы ниже осевых линий вращения ходовых колес, позволяющих водителю находиться постоянно в вертикальном положении и при силовых действиях ног на педали, передвижение мускулоката осуществляется ножным приводом толкающего типа, состоящим из педалей и толкателей, на конце толкателей, на осях, установлены толкающие ролики, толкатели перемещаются по направляющим, расположенным на раме мускулоката, от рабочего хода педалей, толкатели с толкающими роликами воздействуют попеременно на кольцевые направляющие ободов ходовых колес возвратно-поступательным движением ног водителя, отталкивающим движением от общей массы мускулоката и воздействием массой водителя вперед, при этом ходовые колеса воспринимают толкающую силу прямолинейного движения толкателей с толкающими роликами, преобразуя во вращение ходовых колес в сторону движения мускулоката, вращение ходовых колес и движение мускулоката происходит за счет плеча, образующегося расстоянием от поверхности опоры ходового колеса на дорожное полотно, до места приложения силы толкателем с толкающими роликами на обод ходового колеса, при этом между толкающими роликами и ходовым колесом и между опорными роликами и ходовым колесом действуют свободные связи, не препятствующие вращению ходового колеса, так как основная масса рамы с водителем располагается на опорных роликах, с возможностью свободного движения опорных роликов по кольцевым направляющим и обеспечивая свободное вращение ходового колеса, а толкатели передают движущую силу ходовому колесу через вращающийся толкающий ролик, обеспечивающий свободное вращение ходовому колесу, при обратном свободном ходе педали с толкателем и толкающим роликом отводятся в исходное положение при помощи скобы, установленной на педали, действием ноги.
2. Мускулокат по п.1, отличающийся тем, что ходовое колесо, например, с правого борта мускулоката закрыто съемной мягкой пластиной, с возможностью принятия давления ветра, использующегося для движения мускулоката.
| СПОСОБ ИНФРАКРАСНОГО И УЛЬТРАФИОЛЕТОВОГО ОБЛУЧЕНИЯ МОЛОДНЯКА СВИНЕЙ | 2006 |
|
RU2319524C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДУГООБРАЗНОЙ ЛЕНТЫ | 2006 |
|
RU2352425C2 |
| JP 2008284948 A, 27.11.2008 | |||
| Устройство для управления повозкой с одним кольцевым рельсом | 1932 |
|
SU36821A1 |

