Изобретение в целом относится к радиотехническим беспроводным MIMO (Multiple-In Multiple-Out) коммуникационным системам, а именно к способам приема сигнала в системе передачи, использующей технологию MIMO.
MIMO системы являются новым направлением в области беспроводных систем связи и благодаря возможности параллельной передачи сигнала по нескольким пространственно разнесенным каналам в одном и том же диапазоне спектра демонстрируют очень высокую спектральную эффективность.
Одним из наиболее распространенных способов передачи сигналов по MIMO каналам является пространственное мультиплексирование, известное также как V-BLAST архитектура (Vertical Bell Laboratories Layered Space Time architecture), а наиболее популярным методом детектирования такого сигнала является V-BLAST детектор [1], в котором использует упорядоченное последовательное исключение (подавление) интерференционных каналов Ordered Successive Interference Cancellation (OSIC) [2]. Алгоритм OSIC использует широко известный прием решения системы линейных уравнений методом последовательного исключения. MIMO система в частотной области может быть описана матричным уравнением (1),

где Y - М-мерный вектор отсчетов комплексного сигнала на входе MIMO детектора, который можно считать вектором выходных отчетов MIMO канала, Х - N-мерный вектор переданных модулированных QAM символов в передатчике, который можно считать вектором входных отсчетов MIMO канала, η - М-мерный вектор отсчетов комплексного шума, н - комплексная канальная матрица MIMO канала размера М×N. Поскольку в общем случае М≥N, решение системы (1) ищется с помощью метода наименьших квадратов (его еще называют Zero Forsing) либо при помощи метода наименьшей среднеквадратической ошибки (его называют, Minimum Mean Square Error MMSE). Так при методе MMSE система (1) преобразуется к виду [2]

где  - матрица линейного преобразования MMSE фильтра,
- матрица линейного преобразования MMSE фильтра,  - дисперсия шума,
- дисперсия шума,  - среднее значение мощности сигнала, IN - единичная матрица размера N×N,
- среднее значение мощности сигнала, IN - единичная матрица размера N×N,  - вектор MMSE оценок переданных QAM символов (MMSE решение).
- вектор MMSE оценок переданных QAM символов (MMSE решение).
Как уже отмечалось, система (2) может быть решена методом последовательного исключения, при котором решения (компоненты вектора оценок  ) определяют слой за слоем, для чего систему (2) преобразуют к треугольному виду
) определяют слой за слоем, для чего систему (2) преобразуют к треугольному виду

где Z - вектор, образованный линейной комбинацией компонент вектора Y, R - верхнетреугольная матрица, - вектор искомых оценок переданных QAM символов.
В данном случае под слоем подразумевают компоненту определяемого вектора . После определения очередной (i-той) компоненты вектора ,  вычитают из Z (где Ri - i-тый столбец матрицы R,
вычитают из Z (где Ri - i-тый столбец матрицы R,  - i-тый компонент вектора ) и столбец Ri удаляется из матрицы R, и таким образом на следующем шаге решают систему с уменьшенным количеством неизвестных (уменьшенным рангом матрицы). В отличие от классического метода последовательного исключения, в алгоритме V-BLAST при удалении очередного слоя вместо используют
- i-тый компонент вектора ) и столбец Ri удаляется из матрицы R, и таким образом на следующем шаге решают систему с уменьшенным количеством неизвестных (уменьшенным рангом матрицы). В отличие от классического метода последовательного исключения, в алгоритме V-BLAST при удалении очередного слоя вместо используют  - «жесткая» оценка переданного QAM символ (символ созвездия, ближайший (в смысле евклидового расстояния) к полученному решению ).
- «жесткая» оценка переданного QAM символ (символ созвездия, ближайший (в смысле евклидового расстояния) к полученному решению ).
Однако способ V-BLAST имеет недостаток, который заключается в распространении ошибки, возникающей вследствие неверного детектирования сигнала в одном из слоев на все последующие. Неверное детектирование возникает в том случае, если символ созвездия  , ближайший к полученному решению , не совпадает с реально переданным символом. В этом случае ошибка, возникающая при детектировании очередного слоя, катастрофически влияет на все последующие слои. Кроме того, V-BLAST не позволяет получить корректную оценку вероятности битового выходного решения («мягкие» решения). Таким образом, во многих реализациях V-BLAST выдает так называемые «жесткие» выходные решения (hard decisions), когда выходную битовую вероятность не учитывают вообще.
, ближайший к полученному решению , не совпадает с реально переданным символом. В этом случае ошибка, возникающая при детектировании очередного слоя, катастрофически влияет на все последующие слои. Кроме того, V-BLAST не позволяет получить корректную оценку вероятности битового выходного решения («мягкие» решения). Таким образом, во многих реализациях V-BLAST выдает так называемые «жесткие» выходные решения (hard decisions), когда выходную битовую вероятность не учитывают вообще.
Существует множество способов коррекции ошибок (сверточные коды, турбо коды, низкоплотностные коды контроля по четности), которые используют в современных коммуникационных системах и которые позволяют эффективно исправлять ошибки на выходе MIMO детекторов. Все они действуют намного эффективнее, когда в качестве входных данных в них подают так называемые «мягкие» битовые решения с корректно вычисленной вероятностью выходных битов. Таким образом, задача получения корректных мягких решений на выходе MIMO детектора становится очень важной.
Наиболее близким к заявленному изобретению является способ, предложенный в заявке [3] (а также описанный в [4]), который позволяет использовать OSIC детектирование для MIMO-OFDM систем одновременно с получением оценки вероятности выходных битов (получение «мягких» решений). В данном способе для последовательного слой за слоем детектирования символов предлагают использовать эквализирующую матрицу на основе MMSE (minimum mean square error) решения

где
Н - канальная матрица размером M×N,
Hi=[hihi+1…hN]- канальная матрица, составленная из столбцов матрицы Н, соответствующих символам, которые еще не были продетектированы в результате решения,  - матрица, состоящая из столбцов, соответствующих уже определенным (продетектированным) символам,
- матрица, состоящая из столбцов, соответствующих уже определенным (продетектированным) символам,
 - ковариационная матрица ошибочных решений, вычисленная по формуле
- ковариационная матрица ошибочных решений, вычисленная по формуле

 , где
, где  ,
,  - дисперсия шума и среднее значение величины сигнала.
- дисперсия шума и среднее значение величины сигнала.
Элементы ковариационной матрицы  ошибочных решений соответствуют величине условной вероятности возникновения ошибок em и en, обусловленных неверными решениями
ошибочных решений соответствуют величине условной вероятности возникновения ошибок em и en, обусловленных неверными решениями  и
и  на предыдущих шагах. Диагональные элементы
на предыдущих шагах. Диагональные элементы  ковариационной матрицы Qe ошибочных решений показывают величину среднеквадратичной ошибки продетектированных (определенных) символов. Полагают, что недиагональные элементы , характеризуют некоррелированные между собой события, поэтому m ≠ n, эквивалентно
ковариационной матрицы Qe ошибочных решений показывают величину среднеквадратичной ошибки продетектированных (определенных) символов. Полагают, что недиагональные элементы , характеризуют некоррелированные между собой события, поэтому m ≠ n, эквивалентно  .
.
Величину усредненной ошибки  и среднеквадратическую ошибку
и среднеквадратическую ошибку  вычисляют на основе вероятности Pe ошибочного решения, которая, в свою очередь, определяется жестким решением
вычисляют на основе вероятности Pe ошибочного решения, которая, в свою очередь, определяется жестким решением  и дисперсией шума
и дисперсией шума  , соответствующей данному решению.
, соответствующей данному решению.
Дисперсию шума для слоя m, который решается (детектируется) на шаге i, определяют по формуле

где gm - столбец матрицы G, соответствующий решению с минимальной величиной ковариации на шаге i.
Вероятность получения ошибочного решения для слоя m определяют на основе двух факторов:
1) места в созвездии QAM, в окрестность которого попадает MMSE решение;
2) соотношения сигнал-шум.
При этом вероятность Р, характеризующая неверное решение, задается следующими выражениями:
(1-Q)2, Q-Q2, Q2 - для точек в окрестности угла QAM созвездия,
(1-Q)(1-2Q)2, Q-Q2, Q2, Q-2Q2 - для точек в окрестности краев QAM созвездия,
(1-2Q)2, Q2, Q-2Q2 - для точек из внутренней части QAM созвездия,
где  ,
,
 - величина, зависящая от отношения мощности сигнала к мощности шума
- величина, зависящая от отношения мощности сигнала к мощности шума  Mc - число точек QAM созвездия.
Mc - число точек QAM созвездия.
Очевидно, что при таком подходе вероятность Pe вычисляется приближенно, поскольку при его вычислении не учитывается точное значение MMSE решения, а принимается во внимание лишь область, в окрестность которой данное решение попадает, а именно: угол, край либо середина QAM созвездия.
Данный способ детектирования (предложенный в заявке [3], а также описанный в [4]) выбран в качестве прототипа заявленного изобретения.
Результаты моделирования способа прототипа показывают, что предложенный в прототипе способ превосходит известный способ MMSE OSIC [2], дающий жесткие решения для выходных битов, а также способ MMSE (с мягкими выходными битами, но без OSIC) [5].
Тем не менее точность решения (детектирования), получаемая в способе прототипа, недостаточно высока по сравнению с максимально достижимой точностью (см. алгоритм максимального правдоподобия [6]). Кроме того, способ прототипа требует обновления матрицы (5) после детектирования каждого нового слоя и пересчета фильтра (4), что является весьма трудоемкой с вычислительной точки зрения операцией.
Задачей заявленного изобретения является создание способа детектирования сигнала в системах связи с MIMO каналом с повышенной точностью детектирования при сохранении сложности реализации, близкой к алгоритму MMSE.
Поставленная задача решена путем создания итерационного (турбо) способа детектирования сигнала в системах связи с MIMO каналом, который включает в себя следующие шаги:
- принимают сигналы, модулированный переданными QAM (Quadrature Amplitude Modulation) символами через несколько приемных антенн;
- осуществляют частотное преобразование принятых сигналов на нулевую несущую частоту;
- формируют отсчеты принятых и преобразованных сигналов путем квантования и дискретизаций, которые рассматриваются как выходные отсчеты MIMO канала, и описываются формулой
Y=HX+η
где Y - М-мерный вектор выходных отсчетов MIMO канала, Х - N-мерный вектор входных отсчетов MIMO канала, η - M-мерный вектор отсчетов, Н - канальная матрица MIMO канала размера M×N,
- по полученным выходным отсчетам MIMO канала оценивают канальную матрицу MIMO канала Н, дисперсию шума и среднюю мощность сигнала ,
- демодулируют QAM символы на основе выходных отсчетов MIMO канала и восстанавливают оригинальные данные, которые содержатся в детектированных QAM символах, производя оценку апостериорной вероятности принятых бит,
при этом заявляемый способ отличается тем, что:
- переданные QAM символы детектируют циклически в рамках итерационного процесса, так что каждая итерация состоит из следующих друг за другом шагов:
- на шаге 1 из вектора выходных отсчетов MIMO канала Y путем линейного преобразования определяют MMSE оценки N переданных QAM символов на основе априорных параметров переданных QAM символов и уже оцененных матрице MIMO канала Н, дисперсии шума и средней мощности сигнала , согласно формуле


где  - N-мерный вектор априорных математических ожиданий переданных QAM символов, Vpr - диагональная матрица, характеризующая априорную дисперсию переданных QAM символов, для каждого компонента
- N-мерный вектор априорных математических ожиданий переданных QAM символов, Vpr - диагональная матрица, характеризующая априорную дисперсию переданных QAM символов, для каждого компонента  (n=1, 2, …N) вектора MMSE оценок
(n=1, 2, …N) вектора MMSE оценок  вычисляют дисперсию ошибки оценивания
вычисляют дисперсию ошибки оценивания  , которая совпадает с соответствующим диагональным элементом корреляционной матрицы VMMSE, вычисляемой по формуле
, которая совпадает с соответствующим диагональным элементом корреляционной матрицы VMMSE, вычисляемой по формуле
VMMSE=Vpr-GMMSEHVpr,
- на шаге 2, путем линейного преобразование каждого n-го (где n=1,2,…N) компонента , вектора MMSE оценок , полученного на шаге 1, и соответствующего ему априорного математического ожидания  переданного QAM символа, осуществляют коррекцию и находят новую линейную оценку
переданного QAM символа, осуществляют коррекцию и находят новую линейную оценку  переданного QAM символа и дисперсию ошибки для этой оценки
переданного QAM символа и дисперсию ошибки для этой оценки 

где  - априорная дисперсия n-го переданного QAM символа,
- априорная дисперсия n-го переданного QAM символа,
- на шаге 3 осуществляют демодуляцию оценок переданных QAM символов, полученных на шаге 2, и вычисляют апостериорные вероятности переданных битов
 ,
,
где х(θ1,…θK) - табличная функция с числом состояний 2K, описывающая сигнальное созвездие переданного QAM символа в зависимости от комбинации переданных бит θk∈{1;0}, k=1, 2, …K, λi,n(1/0) - апостериорная вероятность того, что i-тый бит в n-м QAM символе принимает значение 1 (либо 0), K - число бит в одном QAM символе,
- на шаге 4 формируют нелинейные оценки переданных QAM символов путем весового сложения значений сигнального QAM созвездия, где веса определяются апостериорными вероятностями переданных битов, полученных на шаге 3,

и вычисляют точности этих оценок

- на шаге 5 сравнивают дисперсии оценок, полученных на шаге 4 и шаге 2, и если дисперсия на шаге 4 меньше дисперсии на шаге 2, т.е.  , то осуществляют коррекцию априорного математического ожидания и априорной дисперсии
, то осуществляют коррекцию априорного математического ожидания и априорной дисперсии


если дисперсия на шаге 4 больше либо равна дисперсии на шаге 2, т.е.  , то априорные математических ожидания и дисперсию оставляют без изменений
, то априорные математических ожидания и дисперсию оставляют без изменений
- выходные параметры шага 5, а именно априорные математические ожидания  и дисперсии
и дисперсии  для всех n=1,2,…N, объединенные в вектор новых априорных математических ожиданий
для всех n=1,2,…N, объединенные в вектор новых априорных математических ожиданий  и в новую априорную диагональную корреляционную матрицу
и в новую априорную диагональную корреляционную матрицу  являются входными параметрами на шаге 1 на следующей итерации, апостериорные вероятности переданных бит с шага 3 являются выходными параметрами предложенного способа детектирования сигнала в системах связи с MIMO каналом.
являются входными параметрами на шаге 1 на следующей итерации, апостериорные вероятности переданных бит с шага 3 являются выходными параметрами предложенного способа детектирования сигнала в системах связи с MIMO каналом.
Сопоставительный анализ способа детектирования сигнала в системах связи с MIMO каналом с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа и позволяет повысить точность детектирования и уменьшить сложность выполнения способа детектирования сигнала в системах связи с MIMO каналом.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ детектирования сигнала в системах связи с MIMO каналом отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Для лучшего понимания настоящего изобретения далее приводится его подробное описание с соответствующими чертежами.
Фиг.1. Один из возможных вариантов построения системы связи с MIMO каналом с использованием предлагаемого способа.
Фиг.2. Обобщенная блок-схема алгоритма, описывающая последовательность действия в предложенном способе.
Фиг.3. Блок-диаграмма, иллюстрирующая предложенный способ.
Фиг.4. Графики вероятности битовой ошибки для заявленного способа и прототипа при использовании их в системе связи стандарта Wi-MAX.
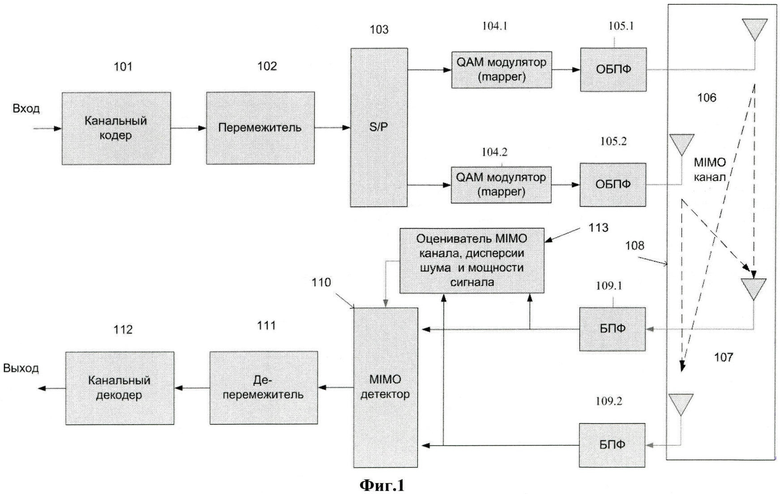
Способ детектирования сигнала по настоящему изобретению используется в системах связи с MIMO каналом, один из возможных вариантов построения которой изображен в виде обобщенной структурной схемы на Фиг.1. Она содержит передающую часть и приемную часть. Передающая часть состоит из канального кодера 101, на вход которого поступают информационные биты, которые необходимо передать, перемежителя 102, преобразователя последовательного потока бит в N параллельные потоки 103, и N параллельных каналов формирования пространственных сигналов, каждый из которых включает в себя QAM модулятор 104 (104.1 и 104.2) и блок обратного преобразования Фурье 105 (105.1 и 105.2). Выходы блоков обратного преобразования Фурье подключаются к передающей антенной системе 106, состоящей из N антенн.
Приемная часть состоит из приемной антенной системы 107 с М антеннами, М блоков преобразования Фурье 109 (109.1 и 109.2), оценивателя MIMO канала, дисперсии шума и мощности сигнала 113, MIMO детектора 110, де-перемежителя 111 и канального декодера, на выходе которого формируются восстановленные переданные биты информации.
Антенные системы с множеством передающих антенн 106 и с множеством приемных антенн 107, совместно со средой распространения радиосигнала, образуют MIMO канал 108.
Преобразование сигнала от выходов блоков QAM модуляторов и до входов MIMO детектора описывается матричным выражением
Y=HX+η
где Y - М-мерный вектор отсчетов комплексного сигнала на входе MIMO детектора, который можно считать вектором выходных отчетов MIMO канала, Х - N-мерный вектор переданных модулированных QAM символов в передатчике, который можно считать вектором входных отсчетов MIMO канала, η - M-мерный вектор отсчетов комплексного шума, Н - комплексная канальная матрица MIMO канала размера М×N.
В заявленном способе предлагают производить детектирования сигнала с использованием итерационного процесса, состоящего из одного предварительного шага и пяти основных шагов.
На предварительном шаге оценивают матрицу MIMO канала Н, среднюю мощность сигнала и дисперсию шума на входе приемника . При этом полагают, что переданный сигнал можно охарактеризовать нормальным распределением с нулевым математическим ожиданием и единичной дисперсией переданных модулированных QAM символов. Данные параметры характеризуют априорное распределение вероятности переданных QAM символов. Шум также может быть охарактеризован нормальным распределением с нулевым математическим ожиданием и дисперсией, равной . Эти операции осуществляются в блоке 113 на Фиг.1. Оцененные матрица MIMO канала Н, средняя мощность сигнала и дисперсия шума являются параметрами для последующих шагов способа.
Блок-схема алгоритма, описывающего последовательность операций предложенного способа MIMO детектирования, приведена на Фиг.2. На первом шаге полагаем вектор априорных средних  , а априорная корреляционная матрица Vpr равна единичной матрице. Таким образом, в блоке 203 на первом шаге реализуется обычный алгоритм MMSE детектирования. Для каждого компонента (n=1,2,…N) вектора MMSE оценок , полученного после MMSE детектора, вычисляют дисперсию ошибки оценивания , которая совпадает с соответствующим диагональным элементом корреляционной матрицы VMMSE.
, а априорная корреляционная матрица Vpr равна единичной матрице. Таким образом, в блоке 203 на первом шаге реализуется обычный алгоритм MMSE детектирования. Для каждого компонента (n=1,2,…N) вектора MMSE оценок , полученного после MMSE детектора, вычисляют дисперсию ошибки оценивания , которая совпадает с соответствующим диагональным элементом корреляционной матрицы VMMSE.
Блок 204 осуществляет линейное преобразование MMSE оценки с учетом дисперсии ошибки оценивания и априорных параметров (априорного среднего  и априорной дисперсии ), и вычисляет новую оценку компоненты
и априорной дисперсии ), и вычисляет новую оценку компоненты  и дисперсию ошибки оценивания . Блок 206 осуществляет демодуляцию оцененных переданных QAM символов и вычисляет апостериорные вероятности переданных бит.
и дисперсию ошибки оценивания . Блок 206 осуществляет демодуляцию оцененных переданных QAM символов и вычисляет апостериорные вероятности переданных бит.
В блоке 207 осуществляется проверка числа выполненных итераций. Если оно равно N, то итерационный процесс заканчивается, и выходные значения апостериорных вероятностей из блока 206 передаются далее на выход. Если число итераций меньше N, то в блоке 208 вычисляют нелинейные оценки переданных QAM символов  , путем весового сложению значений сигнального QAM созвездия, где веса определяются апостериорными вероятностями переданных битов, полученных в блоке 206, и дисперсии этих оценок .
, путем весового сложению значений сигнального QAM созвездия, где веса определяются апостериорными вероятностями переданных битов, полученных в блоке 206, и дисперсии этих оценок .
Блок 209 проверяет условие . Если оно выполняется, то в приемнике делается коррекция априорного среднего и априорной дисперсии, если нет, то априорные значения на следующей итерации остаются прежними.
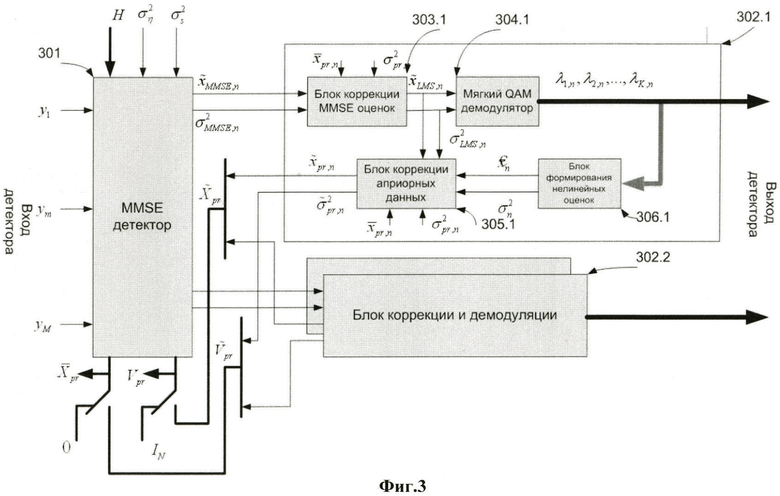
Последовательность действий, описывающих предложенный для патентования способ детектирования сигнала в системах связи с MIMO каналом, иллюстрируется структурной схемой на Фиг.3.
Весь итерационный процесс описывается пятью шагами.
Шаг 1. Из вектора выходных отсчетов MIMO канала Y путем линейного преобразования определяют MMSE оценки N переданных QAM символов на основе априорных параметров переданных QAM символов и уже оцененных матрице MIMO канала Н, дисперсии шума и средней мощности сигнала , согласно формуле:

,
где - N-мерный вектор априорных математических ожиданий переданных QAM символов (для равновероятных комбинаций переданных битов априорные математические ожидания на первой итерации равны нулю), Vpr - диагональная матрица, характеризующая априорную дисперсию переданных QAM символов (для равновероятных комбинаций переданных битов на первой итерации эта величина принимается равной 1).
Для каждого компонента (n=1, 2, …N) вектора MMSE оценок вычисляют дисперсию ошибки оценивания , которая совпадает с соответствующим диагональным элементом корреляционной матрицы VMMSE
VMMSE=Vpr-GMMSEHVpr,
т.е. - n-й диагональный элемент матрицы VMMSE.
Данные операции выполняются в MMSE детекторе (блок 301 на Фиг.3.). В данном блоке имеется основной вход, куда поступает вектор отсчетов наблюдений Y=[у1…уm…уМ]T, где [A]T - обозначает операцию транспонирования вектора А. Этот же вход является входом детектора для систем связи с MIMO каналом, описываемого в данном способе, предложенным для патентования. Так же в MMSE детекторе имеются входы параметров канала, на которые поступают оцененные в блоке 113 (Фиг.1) матрица MIMO канала Н, дисперсия шума и средняя мощность сигнала , и входы априорных данных, на которые подается вектор априорных математических ожиданий (первый вход), и диагональная априорная корреляционная матрица Vpr (второй вход). Выходами MMSE детектора (блок 301 на Фиг.3.) являются MMSE оценки (где n=1, 2, …N) переданных QAM символов и являющихся компонентами вектора MMSE оценок  и соответствующие им дисперсии . На первой итерации в качестве вектора априорных математических ожиданий используется нулевой вектор , а в качестве априорной корреляционной матрицы используется единичная матрица Vpr=IN.
и соответствующие им дисперсии . На первой итерации в качестве вектора априорных математических ожиданий используется нулевой вектор , а в качестве априорной корреляционной матрицы используется единичная матрица Vpr=IN.
Дальнейшая обработка осуществляется N независимыми одинаковыми блоками коррекции и демодуляции (блоки 302 (302.1 и 302.2) на Фиг.3). Их работа описывается в виде одинаковых последовательностей операций над n-м компонентом вектора MMSE оценок, дисперсией ошибки оценивания и априорными параметрами распределений n-го переданного QAM символа.
Шаг 2. Путем линейного преобразование каждого n-го (где n=1,2,…N) компонента вектора MMSE оценок , полученного на шаге 1, и соответствующего ему априорного математического ожидания переданного QAM символа, осуществляют коррекцию и находят новую оценку переданного QAM символа и дисперсию ошибки для этой оценки
где  - n-й диагональный элемент матрицы Vpr (априорная дисперсия n-го переданного QAM символа). Причем новая оценка должна удовлетворять следующему условию. Если ее представить как новое наблюдение и записать в следующем виде:
- n-й диагональный элемент матрицы Vpr (априорная дисперсия n-го переданного QAM символа). Причем новая оценка должна удовлетворять следующему условию. Если ее представить как новое наблюдение и записать в следующем виде:

где xn - переданный QAM символ, µn - гауссовский шум с нулевым математическим ожиданием и дисперсией , то при использовании этого наблюдения совместно с гауссовским априорным распределением переданного QAM символа с математическим ожиданием и дисперсией , получим ту же самую MMSE оценку с дисперсией 
Операции данного шага выполняются в блоках коррекции MMSE оценок 303 (303.1,…) на Фиг.3.
Шаг 3. Осуществляют демодуляцию оценок переданных QAM символов, полученных на шаге 2, и вычисляют апостериорные вероятности переданных битов
,
или другие апостериорные параметры, однозначно связанные с ними (отношения вероятностей, логарифм отношения вероятностей и т.п.), где х(θ1,…θK) - табличная функция с числом состояний 2K, описывающая сигнальное созвездие переданного QAM символа в зависимости от комбинации переданных бит θk={1;0}, k=1,2,…K, λi,n(1/0) - апостериорная вероятность того, что i-й бит в n-м QAM символе принимает значение 1 (либо 0).
Эти операции выполняются в мягких QAM демодуляторах (блоках 204 (204.1,…) на Фиг.3). Выходы блоков 304 (304.1, 304.2,…) являются выходами блоков коррекции и модуляции 302 (302.1, 302.2,…). А выходы всех блоков коррекции и демодуляции 302 (302.1, 302.2,…) являются выходом детектора для систем связи с MIMO каналом, описываемого в данном способе, предложенном для патентования.
Шаг 4. Формируют нелинейные оценки переданных QAM символов, путем весового сложения значений сигнального QAM созвездия, где веса определяются апостериорными вероятностями переданных битов, полученных на шаге 3
 ,
,
и вычисляют точности этих оценок
 .
.
Здесь суммирование происходит по всем комбинациям бит θk∈{1;0}, k=1, 2, …K. Операции шага 4 реализуются в блоке 306 (306.1, 306.2,…).
Шаг 5. Сравнивают дисперсии оценок, полученных на шаге 4 и шаге 2, и если дисперсия на шаге 4 меньше дисперсии на шаге 2, т.е. , то осуществляют коррекцию априорных параметров (математического ожидания и дисперсии)

Если , то априорные математические ожидания и дисперсию оставляют без изменений
.
Выходные параметры шага 5, а именно априорные математические ожидания и дисперсии  , для всех n=1,2,…N, объединяются в вектор новых априорных математических ожиданий
, для всех n=1,2,…N, объединяются в вектор новых априорных математических ожиданий  и новой априорной диагональной корреляционной матрицы
и новой априорной диагональной корреляционной матрицы  и являются входными параметрами на шаге 1 на следующей итерации.
и являются входными параметрами на шаге 1 на следующей итерации.
Операции, описанные на шаге 5, выполняются в блоках коррекции априорных данных 305 (305.1,…) на Фиг.3. Выходы априорных математических ожиданий блоков коррекции априорных данных 305 (305.1,…) всех блоков коррекции и демодуляции 302 (302.1, 302.2,…) объединяются и, начиная со второй итерации, подаются на первый вход априорных данных MMSE детектора 301 в виде нового вектора . Все выходы априорных дисперсий блоков коррекции априорных данных 305 (305.1,…) всех блоков коррекции и демодуляции 302 (302.1, 302.2,…) также объединяются и, начиная со второй итерации, подаются на второй вход априорных данных MMSE детектора 301 в виде новой априорной диагональной корреляционной матрицы 
Апостериорные вероятности переданных битов с шага 3 являются выходными параметрами предложенного способа детектирования сигнала в системах связи с MIMO каналом.
На Фиг.4. приведены графики вероятности битовой ошибки для заявленного способа и прототипа при использовании их в системе связи стандарта Wi-MAX. Линия 1 соответствует прототипу [3]. Линия 2 соответствует способу детектирования сигнала в системах связи с MIMO каналом, выполненным согласно предложенному изобретению. Конфигурация MIMO канала: две передающих и две приемных антенны. Вид модуляции - QAM 16.
На данном рисунке видно, что предложенный алгоритм, реализованный в соответствии с предложенным для патентования способом детектирования сигнала в системах связи с MIMO каналом, обеспечивает более высокую помехоустойчивость (более низкую вероятность битовой ошибки).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИТЕРАТИВНОГО ДЕТЕКТИРОВАНИЯ И ДЕКОДИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2012 |
|
RU2523190C1 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2012 |
|
RU2488963C1 |
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ ДЕКОДИРОВАНИЯ В СИСТЕМЕ МНОГОАНТЕННОЙ ПРИЕМОПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2426255C2 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ ДАННЫХ В СИСТЕМЕ СВЯЗИ С МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ (MIMO) С ИСПОЛЬЗОВАНИЕМ ИНФОРМАЦИИ О СОСТОЯНИИ КАНАЛА | 2002 |
|
RU2292116C2 |
| ПЕРЕДАЧА С ИНКРЕМЕНТНОЙ ИЗБЫТОЧНОСТЬЮ В СИСТЕМЕ СВЯЗИ MIMO | 2004 |
|
RU2502197C2 |
| ПЕРЕДАЧА С ИНКРЕМЕНТНОЙ ИЗБЫТОЧНОСТЬЮ В СИСТЕМЕ СВЯЗИ MIMO | 2004 |
|
RU2369021C2 |
| ДЕТЕКТИРОВАНИЕ И ДЕКОДИРОВАНИЕ С УМЕНЬШЕННОЙ СЛОЖНОСТЬЮ ДЛЯ ПРИЕМНИКА В СИСТЕМЕ СВЯЗИ | 2006 |
|
RU2414062C2 |
| ДЕТЕКТИРОВАНИЕ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СФЕРИЧЕСКОГО ДЕКОДИРОВАНИЯ | 2005 |
|
RU2352064C2 |
| Способ передачи и приема сигналов в многопользовательской системе радиосвязи с множеством передающих и множеством приемных антенн | 2022 |
|
RU2810264C1 |
| Способ совместной оценки канала связи и мягкой демодуляции для COFDM-сигналов и устройство для его реализации | 2016 |
|
RU2658335C1 |

Изобретение в целом относится к радиотехническим беспроводным MIMO коммуникационным системам, а именно к способам приема сигнала в системе передачи, использующей технологию MIMO. Достигаемый технический результат - повышение точности детектирования сигнала в системах связи с MIMO каналом. Технический результат достигается за счет того, что переданные QAM символы детектируют циклически в рамках итерационного процесса, так что каждая итерация состоит из следующих друг за другом шагов: - на шаге 1 из вектора выходных отсчетов MIMO канала путем линейного преобразования определяют MMSE оценки N переданных QAM символов на основе априорных параметров переданных QAM символов и уже оцененных матрице MIMO канала, дисперсии шума и средней мощности сигнала, на шаге 2 осуществляют коррекцию и находят новую линейную оценку переданного QAM символа и дисперсию ошибки для этой оценки, на шаге 3 осуществляют демодуляцию оценок переданных QAM символов, полученных на шаге 2, и вычисляют апостериорные вероятности переданных битов, на шаге 4 формируют нелинейные оценки переданных QAM символов путем весового сложения значений сигнального QAM созвездия, где веса определяются апостериорными вероятностями переданных битов, полученных на шаге 3, на шаге 5 сравнивают дисперсии оценок, полученных на шаге 4 и шаге 2. 4 ил.
Способ детектирования сигнала в системах связи с MIMO каналом, включающий в себя следующие шаги:
- принимают сигналы, модулированные переданными QAM (Quadrature Amplitude Modulation) символами через несколько приемных антенн;
- осуществляют частотное преобразование принятых сигналов на нулевую несущую частоту;
- формируют отсчеты принятых и преобразованных сигналов путем квантования и дискретизации, которые рассматриваются как выходные отсчеты MIMO канала, и описываются формулой
Y=HX+η,
где Y - М-мерный вектор выходных отсчетов MIMO канала, Х - N-мерный вектор входных отсчетов MIMO канала, η - М-мерный вектор отсчетов шума, Н - канальная матрица MIMO канала размера M×N, при этом полагают, что частота дискретизации равна частоте следования QAM символов, поэтому вектор входных отсчетов MIMO канала Х является также вектором переданных QAM символов,
- по полученным выходным отсчетам MIMO канала оценивают канальную матрицу MIMO канала Н, дисперсию шума и среднюю мощность сигнала ,
- детектируют QAM символы на основе выходных отсчетов MIMO канала и восстанавливают оригинальные данные, которые содержатся в детектированных QAM символах, производя оценку апостериорной вероятности принятых бит,
отличающийся тем, что
- переданные QAM символы детектируют циклически в рамках итерационного процесса, так что каждая итерация состоит из следующих друг за другом шагов:
- на шаге 1 из вектора выходных отсчетов MIMO канала Y путем линейного преобразования определяют MMSE оценки N переданных QAM символов на основе априорных параметров переданных QAM символов и уже оцененных матрице MIMO канала Н, дисперсии шума и средней мощности сигнала , согласно формуле:


где - N-мерный вектор априорных математических ожиданий переданных QAM символов, Vpr - диагональная матрица, характеризующая априорную дисперсию переданных QAM символов, для каждого компонента (n=1, 2, …N) вектора MMSE оценок вычисляют дисперсию ошибки оценивания , которая совпадает с соответствующим диагональным элементом корреляционной матрицы VMMSE, вычисляемой по формуле
VMMSE=Vpr-GMMSEHVpr,
- на шаге 2 путем линейного преобразования каждого n-го (где n=1, 2,…N) компонента вектора MMSE оценок  полученного на шаге 1, и соответствующего ему априорного математического ожидания переданного QAM символа осуществляют коррекцию и находят новую линейную оценку переданного QAM символа и дисперсию ошибки для этой оценки
полученного на шаге 1, и соответствующего ему априорного математического ожидания переданного QAM символа осуществляют коррекцию и находят новую линейную оценку переданного QAM символа и дисперсию ошибки для этой оценки

где - априорная дисперсия n-го переданного QAM символа,
- на шаге 3 осуществляют демодуляцию оценок переданных QAM символов, полученных на шаге 2, и вычисляют апостериорные вероятности переданных битов

где х(θ1…θK) - табличная функция с числом состояний 2K, описывающая сигнальное созвездие переданного QAM символа в зависимости от комбинации переданных бит θk∈{1; 0}, k={1, 2,…К, λi,n(1/0) - апостериорная вероятность того, что i-й бит в n-ом QAM символе принимает значение 1 (либо 0), К - число бит в одном QAM символе,
- на шаге 4 формируют нелинейные оценки переданных QAM символов путем весового сложения значений сигнального QAM созвездия, где веса определяются апостериорными вероятностями переданных битов, полученных на шаге 3,
и вычисляют точности этих оценок

- на шаге 5 сравнивают дисперсии оценок, полученных на шаге 4 и шаге 2, и если дисперсия на шаге 4 меньше дисперсии на шаге 2, т.е.  то осуществляют коррекцию априорного математического ожидания и априорной дисперсии
то осуществляют коррекцию априорного математического ожидания и априорной дисперсии

если дисперсия на шаге 4 больше, либо равна дисперсии на шаге 2, т.е.  то априорные математические ожидания и дисперсию оставляют без изменений
то априорные математические ожидания и дисперсию оставляют без изменений
- выходные параметры шага 5, а именно априорные математические ожидания и дисперсии  для всех n=1, 2,…N, объединенные в вектор новых априорных математических ожиданий и в новую априорную диагональную корреляционную матрицу
для всех n=1, 2,…N, объединенные в вектор новых априорных математических ожиданий и в новую априорную диагональную корреляционную матрицу  , являются входными параметрами на шаге 1 на следующей итерации, апостериорные вероятности переданных бит с шага 3 являются выходными параметрами предложенного способа детектирования сигнала в системах связи с MIMO каналом.
, являются входными параметрами на шаге 1 на следующей итерации, апостериорные вероятности переданных бит с шага 3 являются выходными параметрами предложенного способа детектирования сигнала в системах связи с MIMO каналом.
| US 2006215781 A1, 28.09.2006 | |||
| RU 2007136105 A, 10.04.2009 | |||
| RU 2007124740 A, 10.01.2009. |

