Изобретение относится к области радиосвязи, а более конкретно, к системам беспроводной связи с применением принципа многоантенной приемопередачи (MIMO - Multiple Input Multiple Output) и техники декодирования, основанной на упорядоченном последовательном исключении помеховой составляющей (OSIC - Ordered Successive Interference Cancellation).
Для качественной связи в MIMO-системе необходим эффективный инструмент детектирования сигнала. В частности, в известной схеме детектирования V-BLAST (см. P.W.Wolniansky, G.J.Foschini, G.D.Golden, and R.A.Valenzuela, “V-BLAST: an architecture for realizing very high data rates over the rich-scattering wireless channel,” in URSI International Symposium on Signals, Systems and Electronics, pp.295-300, September) [1] применяется последовательное исключение помеховой составляющей, что не требует высоких вычислительных ресурсов и демонстрирует хорошие результаты при работе с жесткими решениями на выходе. Однако эта схема значительно уступает по эффективности схеме максимального правдоподобия (ML - maximum likelihood), которая обеспечивает мягкие решения, но очень требовательна к вычислительным ресурсам. Представленное изобретение относится к устройству и способу детектирования сигналов в MIMO системах, по эффективности близкому к схеме ML и невысокой сложностью реализации.
Наиболее близким к заявляемому изобретению является техническое решение, описанное в заявке США №2008/0152032 [2]. В этой заявке предлагается способ и устройство, которые позволяют использовать в системах MIMO детектирование сигнала на основе OSIC, при этом детектирование сигнала позволяет оценивать вероятность выходного бита, получая мягкие решения (soft output).
Схема передачи MIMO с использованием m передающих (Tx) антенн и n приемных (Rx) антенн описывается уравнением:
y=Hx+ν
Процедура сортировки, регламентирующая последовательность определения переданных символов, основана на принципе наибольшей нормы столбца матрицы канальных коэффициентов, что позволяет в первую очередь выбирать Тх антенну с наибольшим значением вектора канальных коэффициентов. В представленном изобретении также рассмотрен альтернативный способ сортировки с применением упорядочивания на основе минимума среднего квадрата ошибки (MMSE).
Способ детектирования предусматривает оценку всех возможных переданных сигналов послойно, где в качестве слоя понимается сигнал, переданный одной Тх антенной. Так, например, в случае модуляции 16 QAM (квадратурная амплитудная модуляция) первоначально вычисляются 16 кандидатов в слое 1, который определяется в качестве наилучшего по вышеупомянутой процедуре сортировки. С помощью способа MMSE-OSIC (MMSE - Minimum Mean Square Error - минимум среднего квадрата ошибки) для каждого символа из слоя 1 детектируются символы, принадлежащие другим слоям, что приводит к формированию 16 векторов-кандидатов. Среди этих 16 векторов выделяют K наилучших кандидатов, где K - это параметр, который для примера в заявке установлен как K=3. Наилучшие кандидаты определяются по критерию минимума эвклидова расстояния:

где - xi вектор-кандидат. Кроме того, при вычислении эвклидова расстояния (2) определяют логарифм отношения правдоподобия (LLR) для мягкого решения:
После этого путем перебора всех возможных символов в слое 2 при фиксировании K символов из слоя 1 определяют следующую группу векторов-кандидатов (состоящую из К векторов). Вектор-решение для других слоев также определяется с помощью способа MMSE-OSIC. Таким образом, необходимо протестировать m*K кандидатов. Значения логарифма отношения правдоподобия LLR для слоя 2 вычисляются по формуле (3). Также значения LLR для слоя 1 могут быть пересчитаны в случае, если получено более короткое эвклидово расстояние по сравнению с рассчитанными в предыдущем слое. Такую процедуру аналогичным образом применяют для всех оставшихся слоев. Для обработки каждого слоя определяют соответствующий фильтр MMSE:
Недостаток прототипа заключается в том, что хотя степень сложности такого способа значительно ниже, чем у способа ML, тем не менее, она все еще очень высока, особенно в случае, когда число Tx и Rx антенн является большим.
Задача, на решение которой направлено заявляемое изобретение, состоит в том, чтобы разработать, во-первых, усовершенствованный способ детектирования сигнала в системе MIMO, обладающий точностью, близкой к методу максимального правдоподобия, но менее требовательный к вычислительным ресурсам, и, во-вторых, разработать устройство для реализации такого способа.
Первая часть этой технической задачи решена за счет разработки способа детектирования сигнала в системах беспроводной связи с применением принципа многоантенной приемопередачи (MIMO), при этом способ предусматривает выполнение следующих операций:
- определяют вектор полученных сигналов с помощью нескольких приемных антенн;
- проводят оценку канала между каждой передающей Tx антенной и каждой приемной Rx антенной и формируют матрицу канала, устанавливают на основе данных о состоянии канала порядок (очередность) детектирования символов, переданных различными передающими Тх антеннами, и вычисляют весовые коэффициенты для детектирования символов в MIMO-системе, на основе вектора принятых сигналов детектируют последовательно символы в установленном порядке и рассчитывают дисперсию ошибки в детектировании символа, вычисляют эвклидово расстояние между обнаруженными символами и точками созвездия символов, определяют значения логарифма отношения правдоподобия (LLR) для оценки вероятности выходного бита (soft bit output), формируют группу наиболее вероятных символов-кандидатов из точек созвездия символа, при этом
- определяют на этапе n эвклидово расстояние через нормализованную сумму эвклидовых расстояний:  , где
, где  - это эвклидово расстояние, вычисленное на предыдущем этапе для кандидата с индексом i,
- это эвклидово расстояние, вычисленное на предыдущем этапе для кандидата с индексом i,  - оценка дисперсии ошибки в детектировании символа на этапе n,
- оценка дисперсии ошибки в детектировании символа на этапе n,  - эвклидово расстояние между обнаруженным символом и точкой к созвездия сигнала, причем это последнее расстояние вычисляют для всех точек созвездия и для каждого символа-кандидата из группы кандидатов, сформированной на предыдущем этапе, затем формируют новую группу символов-кандидатов, основанную на принципе минимума нормализованной эвклидовой суммы, после чего удаляют символы-кандидаты из обновленных данных о полученном векторе.
- эвклидово расстояние между обнаруженным символом и точкой к созвездия сигнала, причем это последнее расстояние вычисляют для всех точек созвездия и для каждого символа-кандидата из группы кандидатов, сформированной на предыдущем этапе, затем формируют новую группу символов-кандидатов, основанную на принципе минимума нормализованной эвклидовой суммы, после чего удаляют символы-кандидаты из обновленных данных о полученном векторе.
Вторая часть задачи решена за счет новой конструкции устройства, реализующего заявляемый способ детектирования сигнала в системах беспроводной связи с применением принципа многоантенной приемопередачи (MIMO). Предлагаемое устройство предусматривает использование нескольких приемных Rx антенн, при этом оно состоит из
- модуля сортировки сигналов, устанавливающего порядок детектирования символов, каждый из которых передается с помощью одной передающей Тх антенны;
- модуля расчета весовых коэффициентов, определяющего весовые коэффициенты фильтра для детектирования символов в MIMO системе;
- модуля детектирования символов, осуществляющего оценку символа, переданного одной Тх антенной, и определяющего дисперсию ошибки оценивания;
- модуля вычисления эвклидова расстояния и оценки значения логарифма отношения правдоподобия (LLR), определяющего эвклидово расстояние между детектированным символом и точками сигнального созвездия, а также значение логарифма отношения правдоподобия (LLR) на основе эвклидовых расстояний;
- модуля формирования групп кандидатов, определяющего наиболее вероятные переданные точки символьного созвездия;
- модуля исключения символа-кандидата, вычитающего символ, переданный одной Тх антенной из вектора принятого сигнала;
при этом на вход модуля сортировки сигналов поступает информация о параметрах канала между каждой Тх антенной и каждой Rx антенной, выход модуля сортировки сигналов подключен к первому входу модуля расчета весовых коэффициентов, на второй вход модуля расчета весовых коэффициентов поступает информация об отношении сигнал/шум, выход модуля расчета весовых коэффициентов подключен к первому входу модуля детектирования символов, на второй вход модуля детектирования символов поступает вектор принятого сигнала, выход модуля детектирования символов подключен к входу модуля вычисления эвклидова расстояния, первый выход которого подключен ко второму входу модуля детектирования символов через последовательно соединенные модуль формирования групп кандидатов и модуль исключения символа-кандидата, обновляющий вектор принятых данных с исключенным символом-кандидатом, обновленный вектор подается на вход модуля детектирования символов, символы, переданные различными Тх антеннами, детектируются последовательно, в соответствии с порядком, определенным модулем сортировки, а второй выход модуля вычисления эвклидова расстояния является источником данных об оценке логарифма отношения правдоподобия (LLR), при этом конструкция устройства отличается тем, что на вход модуля вычисления эвклидова расстояния подается только информация о детектированном символе и об оценке дисперсии ошибки детектирования, таким образом, данный модуль вычисляет евклидовы расстояния до точек созвездия и производит оценку LLR только на основании информации о детектированном символе и о типе модуляции, в то время как в прототипе на вход модуля вычисления эвклидова расстояния подаются дополнительно вектор принятого сигнала и матрица канальных коэффициентов.
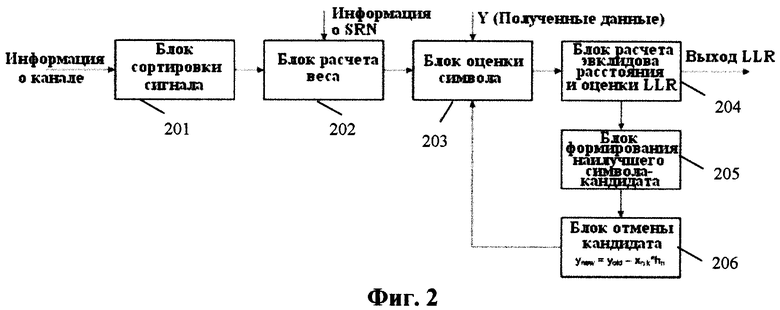
Блок-схема устройства MIMO детектора, реализующего предложенный способ, показана на Фиг.2. Модуль сортировки сигналов (Signal Sorter) определяет порядок детектирования символов в соответствии с критерием минимума среднеквадратичной ошибки MMSE решения либо (в другом исполнении) в соответствии с критерием максимума веса столбца канальной матрицы. Данный модуль аналогичен модулю Channel Sorter (312) прототипа. Модуль Weight Calculator осуществляет расчет элементов матрицы MMSE. Данный модуль аналогичен одноименному модулю (314) прототипа. Модуль Symbol Detector (Estimator) вычисляет значение переданного символа методом MMSE. Данный модуль аналогичен модулю Symbol Detector (414, 416, 418, 514, 516, 614) прототипа. Модуль Euclidean Distance Calculator & LLR estimator производит расчет эвклидовых расстояний между точкой MMSE решения и каждой из точек созвездия для данного типа модуляции. Данный модуль аналогичен функционально модулю Euclidean Calculator (422, 522, 622) прототипа, однако он использует отличный от прототипа метод расчета эвклидовых расстояний и использует для этого другие входные данные. Прототип согласно пункту [0090] вычисляет евклидовы расстояния между принятым вектором и оценкой принятого вектора для данного набора переданных символов, и, таким образом, на вход данного модуля в прототипе подается принятый вектор Y и вычисленная оценка данного вектора Hx. В заявленном устройстве на вход данного модуля подается MMSE решение (точка на на комплексной плоскости) для обрабатываемого слоя, что требует существенно меньшего объема входных данных и упрощает расчет эвклидовых расстояний. Одновременно данный модуль производит расчет значений LLR аналогично тому, как это делается в модулях LLR Generator (332, 334, 336, 338) прототипа. Модуль Best symbol candidate former формирует группу из точек символьного созвездия с наименьшим евклидовым расстоянием относительно точки MMSE решения. Функционально данный модуль аналогичен модулю Candidate Group Selector (424, 524, 624) прототипа. Модуль Candidate canceller вычитает символ-кандидат из вектора принятого сигнала. Данный модуль аналогичен модулю Symbol Substitution Unit (412, 512, 612, 712) прототипа.
Для лучшего понимания сущности заявляемого изобретения далее приводится его детальное описание с привлечением графических материалов.
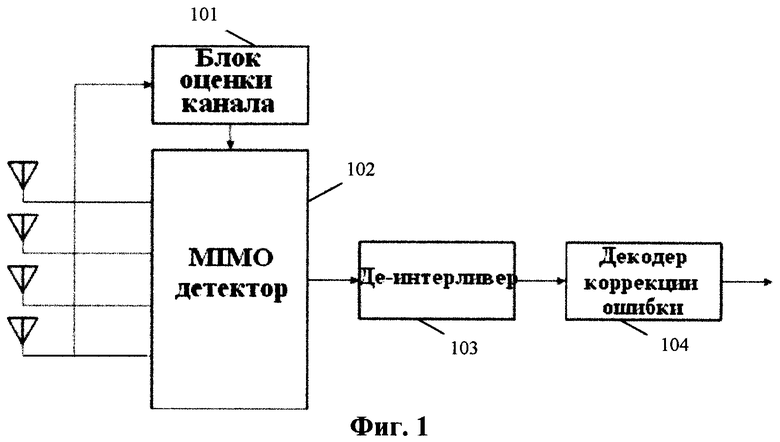
На Фиг.1 представлена блок-схема MIMO приемника, где 101 - блок оценки канала, 102 - MIMO детектор, 103 - де-интерливер, 104 - декодер коррекции ошибки.
На Фиг.2 представлена блок-схема MIMO детектора согласно заявляемому изобретению, где 201 - блок сортировки сигнала, 202 - блок расчета веса, 203 - блок оценки символа, 204 - блок расчета эвклидова расстояния и оценки LLR, 205 - блок формирования наилучшего символа-кандидата, 206 - блок отмены кандидата.
Нам Фиг.3 приведена блок-схема, иллюстрирующая процесс детектирования сигнала согласно заявляемому изобретению.
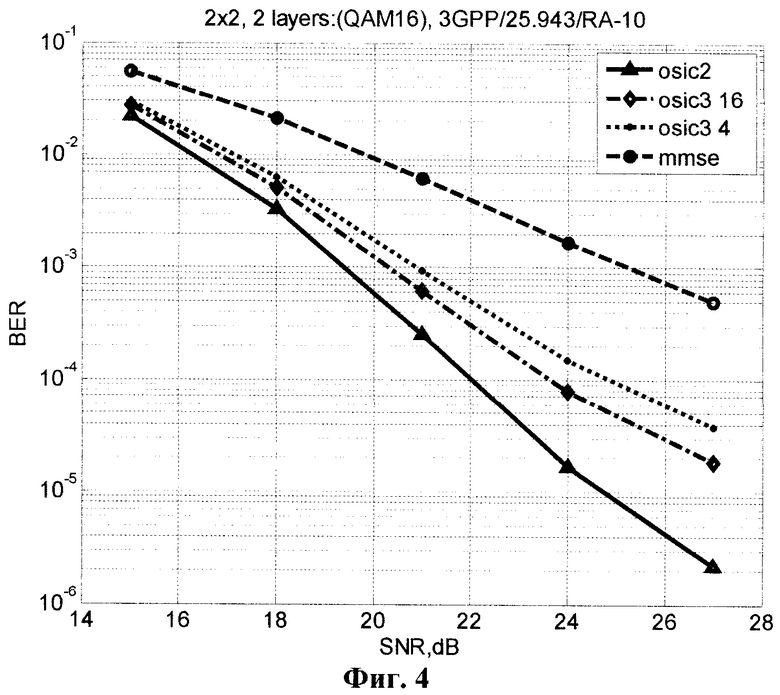
На Фиг.4 приведены данные, иллюстрирующие работу приемника (вероятность битовой ошибки), где предложенное решение сравнивается с приемником MMSE MIMO и прототипом [2]. Моделирование было проведено для системы 2×2 MIMO V-BLAST (каждый поток имеет 16QAM модуляцию), соответствующей стандарту IEEE 802.16е со сверточным кодером и декодером Viterbi. Модель канала - 3GPP/25.943/RA-10. Отношение сигнал/шум (signal/noise ratio - SNR) определяется как отношение энергии сигнала, излучаемой всеми Тх антеннами, к энергии шума в каждой Rx антенне.
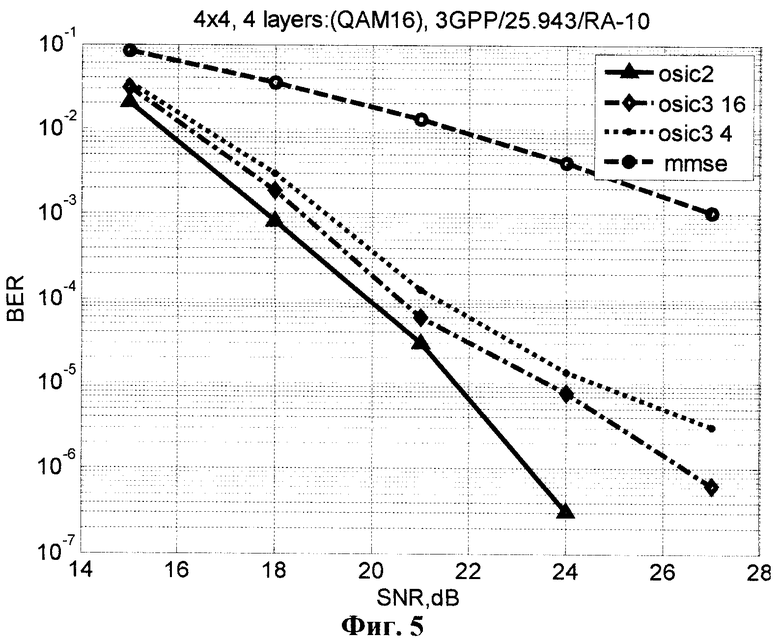
Нам Фиг.5 приведен график, иллюстрирующий работу приемника (вероятность битовой ошибки), где предложенное решение сравнивается с приемником MMSE MIMO и прототипом [2]. Было проведено моделирование для системы 4×4 MIMO V-BLAST (каждый поток имеет 16QAM модуляцию), соответствующей стандарту IEEE 802.16е со сверточным кодером и декодером Viterbi. Модель канала 3GPP/25.943/RA-10. Отношение сигнал/шум определяется как отношение энергии сигнала, излучаемой всеми Тх антеннами, к энергии шума в каждой Rx антенне.
Для достижения заявленного результата процедура детектирования должна состоять из следующих этапов:
Этап 1 - оценивают матрицу Н канала.
Этап 2 - определяют MMSE-фильтры Wi, i=0, … m-1 согласно формуле (4), где индекс 0 соответствует полной матрице H, и определяют порядок (очередность выполнения) процедуры MMSE-OSIC, на основе минимума дисперсии ошибки в MMSE решении. Легко показать, что этот порядок определяется путем сортировки модулей диагональных элементов матрицы WH, при этом наибольший элемент соответствует первому слою, затем процедуру сортировки повторяют для уменьшенной матрицы H1 используя диагональные элементы W1H1 и так далее вплоть до последнего слоя.
Этап 3 - получают решения, используя MMSE фильтр (весовые коэффициенты) для слоя 1, где индекс 1 означает наилучший слой для процедуры сортировки:

 , где w - строка матрицы W MMSE фильтра, соответствующая наилучшему слою.
, где w - строка матрицы W MMSE фильтра, соответствующая наилучшему слою.
Этап 4 - определяют К наилучших символов-кандидатов для слоя 1 исходя из минимального эвклидова расстояния между детектированньш символом  и точками сигнального созвездия
и точками сигнального созвездия
 и определяют значения LLR для слоя 1:
и определяют значения LLR для слоя 1:
 - комплексная оценка дисперсии ошибок для слоя 1.
- комплексная оценка дисперсии ошибок для слоя 1.
Этап 5 - исключают символы-кандидаты  слоя 1 из принятого вектора y:
слоя 1 из принятого вектора y:

где  - столбец матрицы Н, соответствующий слою 1. Соответственно получают K обновленных принятых векторов y1 с исключенным слоем 1.
- столбец матрицы Н, соответствующий слою 1. Соответственно получают K обновленных принятых векторов y1 с исключенным слоем 1.
Этап 6 - повторяют этапы 3-5 для остальных слоев, при этом эвклидово расстояние d в слое k(k>1) определяют по формуле

где i обозначает номер кандидата, определенного на предшествующем слое, второй индекс у d и индекс у σ обозначают номер слоя. Например, d1,1 означает эвклидово расстояние, определенное для кандидата 1 в слое 1, d1,2 - эвклидово расстояние, определенное для кандидата 1 в слое 2, и т.д.
После определения эвклидовых расстояний вычисляют значения LLR для слоя k по формуле:

где dp, dt обозначают евклидовы расстояния между MMSE-решеннем в слое k и точкой созвездия, имеющей подходящий бит bi.
Легко убедиться, что для всех других слоев, за исключением первого слоя, при выявлении наилучших кандидатов и вычислении LLR приходится учитывать K*М кандидатов, где K - число кандидатов, которые отслеживают после обработки предыдущего слоя, M - число точек в созвездии.
Упрощение предлагаемого алгоритма по сравнению с прототипом [2] достигается за счет исключения из него ряда вычислений. В частности, при получении решения для каждого слоя, за исключением первого слоя, по способу-прототипу приходится учитывать K*М вариантов вектора yi, в то время как решение по заявляемому способу требует учитывать только K вариантов. Следует отметить, что получение MMSE - решения для каждого слоя требует m комплексных перемножений. Кроме того, прототип [2] определяет эвклидово расстояние как квадрат нормы разности между принятым вектором y и Hx (см. формулу (2)), где число кандидатов снова равно K*M. Даже если учесть, что x принадлежит фиксированному созвездию (компоненты x являются целыми числами) и поэтому перемножение Hx может быть заменено суммированием, количество вычислений остается большим. В заявляемом способе эвклидово расстояние рассчитывается как расстояние между MMSE-решением (которое является просто точкой в комплексном пространстве) и точками созвездия сигнала A∈S, поэтому в случае QAM-модуляции вычисляют квадрат нормы разности между двумя комплексными величинами, а не между векторами.
По сравнению с прототипом [2] в заявляемом способе требуются некоторые дополнительные вычисления. В частности, эвклидово расстояние d рассчитывают с помощью формулы (5), что требует дополнительных перемножений для сложения дробей. Кроме того, необходимо вычислять MMSE-фильтр W для полной матрицы H. Однако эти дополнительные вычисления несопоставимо малы по сравнению с вышеупомянутым снижением сложности. В нижеприведенной таблице приведено сравнение числа необходимых перемножений в заявляемом алгоритме и в прототипе [2] для MIMO системы 4×4 и модуляции 16QAM. В обоих алгоритмах используют 4 кандидата. Следует отметить, что благодаря тому, что в случае QAM-модуляции передаваемые символы представлены целыми числами (т.е. ±1, ±3), во многих случаях перемножение может быть заменено сложением, которое требует значительно меньших аппаратных ресурсов, чем перемножение. Эта отличительная черта была принята во внимание при оценке числа необходимых перемножений в прототипе [2] и в заявляемом алгоритме.
Также следует отметить, что поскольку в способе-прототипе [2] эвклидово расстояние определяют по формуле (2), отказ от перемножений в Hx и Wyi ведет к большому числу операций сложения, что в любом случае увеличивает время ожидания решения. В заявляемом способе эта операция отсутствует.
Фиг.4 и Фиг.5 иллюстрируют рабочие характеристики заявляемого способа по сравнению со способом-прототипом [2] и стандартным линейным MMSE-детектором. Видно, что хотя заявляемый способ демонстрирует некоторое ухудшение по сравнению с прототипом [2], тем не менее, он значительно лучше стандартного MMSE-детектора. Это может рассматриваться в качестве хорошего компромисса между эффективностью и сложностью для применения в конкретных устройствах.
Для эффективной работы заявляемого способа, важно, чтобы порядок детектирования устанавливали в соответствии с процедурой MMSE-OSIC, и, соответственно, детектирование символа выполняли с использованием весовой матрицы MMSE.
Возможен также вариант реализации заявляемого способа, при котором порядок детектирования устанавливают в соответствии с процедурой Zero-Forcing и соответственно детектирование символа выполняют с использованием весовой матрицы Zero-Forcing.
Возможен также вариант реализации заявляемого способа, при котором порядок детектирования устанавливают в соответствии с нисходящим порядком норм столбцов матрицы.
Для эффективной работы заявляемого способа важно, чтобы эвклидово расстояние и значение LLR вычисляли по формуле:  , где dp, dt обозначают нормализованную сумму эвклидова расстояния до точек созвездия сигнала, имеющих i-й бит 0(Ap∈Si,0), и до точек имеющих i-й бит 1 (At∈Si,1).
, где dp, dt обозначают нормализованную сумму эвклидова расстояния до точек созвездия сигнала, имеющих i-й бит 0(Ap∈Si,0), и до точек имеющих i-й бит 1 (At∈Si,1).
Аппаратное воплощение идеи иллюстрируется на Фиг.1 и Фиг.2, а работа способа поясняется на Фиг.3. При этом заявляемый алгоритм значительно упрощен с точки зрения вычислительных сложностей, и поэтому его целесообразно применять в проектируемых MIMO-OFDM системах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕТЕКТИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2012 |
|
RU2488963C1 |
| СПОСОБ ИТЕРАТИВНОГО ДЕТЕКТИРОВАНИЯ И ДЕКОДИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2012 |
|
RU2523190C1 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2010 |
|
RU2444846C1 |
| ДЕТЕКТИРОВАНИЕ И ДЕКОДИРОВАНИЕ С УМЕНЬШЕННОЙ СЛОЖНОСТЬЮ ДЛЯ ПРИЕМНИКА В СИСТЕМЕ СВЯЗИ | 2006 |
|
RU2414062C2 |
| ОБНАРУЖЕНИЕ КВАЗИМЯГКИХ РЕЗУЛЬТАТОВ ПО МЕТОДУ МАКСИМАЛЬНОГО ПРАВДОПОДОБИЯ ДЛЯ СИСТЕМ С МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ | 2008 |
|
RU2459358C2 |
| ДЕТЕКТИРОВАНИЕ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СФЕРИЧЕСКОГО ДЕКОДИРОВАНИЯ | 2005 |
|
RU2352064C2 |
| СИСТЕМА МОБИЛЬНОЙ СВЯЗИ, ПРИЕМНОЕ УСТРОЙСТВО И СПОСОБ ПЕРЕДАЧИ СИГНАЛА | 2009 |
|
RU2481712C2 |
| ПЕРЕДАЧА С ИНКРЕМЕНТНОЙ ИЗБЫТОЧНОСТЬЮ В СИСТЕМЕ СВЯЗИ MIMO | 2004 |
|
RU2502197C2 |
| ПЕРЕДАЧА С ИНКРЕМЕНТНОЙ ИЗБЫТОЧНОСТЬЮ В СИСТЕМЕ СВЯЗИ MIMO | 2004 |
|
RU2369021C2 |
| СФЕРИЧЕСКОЕ ОБНАРУЖЕНИЕ И ВЫБОР СКОРОСТИ ДЛЯ ПЕРЕДАЧИ MIMO | 2007 |
|
RU2423012C2 |
Изобретение относится к технике связи и может использоваться в системах беспроводной связи с применением принципа многоантенной приемопередачи (MIMO). Технический результат состоит в разработке системы, обладающей точностью. Для этого определяют вектор принятых сигналов с помощью нескольких приемных антенн; проводят оценку канала между каждой передающей и приемной антеннами и формируют матрицу канала, устанавливают на основе данных о состоянии канала порядок детектирования символов, переданных различными передающими Тх антеннами, и вычисляют весовые коэффициенты для детектирования символов в MIMO-системе, на основе вектора принятых сигналов детектируют последовательно символы в установленном порядке и рассчитывают дисперсию ошибки в детектировании символа, формируют группу наиболее вероятных символов-кандидатов из точек символьного созвездия. 2 н. и 4 з.п. ф-лы, 5 ил.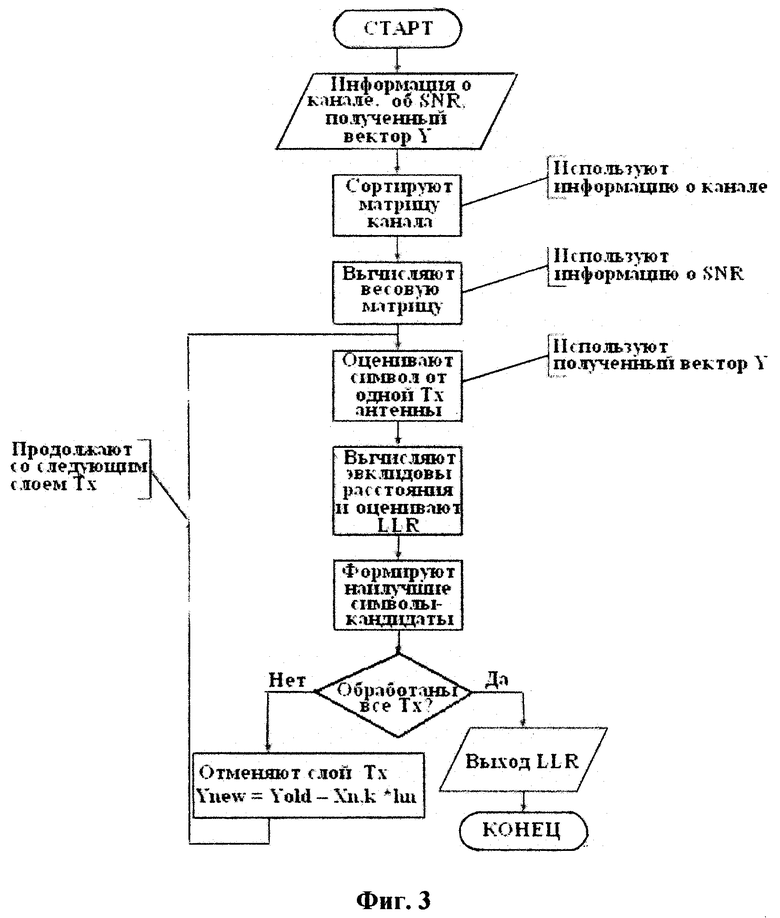
1. Способ детектирования сигналов в системах беспроводной связи с применением принципа многоантенной приемопередачи (МГМО), предусматривающий выполнение следующих операций:
определяют вектор принятых сигналов с помощью нескольких приемных антенн;
проводят оценку канала между каждой передающей Тх антенной и каждой приемной Rx антенной и формируют матрицу канала;
устанавливают на основе данных о состоянии канала порядок детектирования символов, переданных различными передающими Тх антеннами, и вычисляют весовые коэффициенты для детектирования символов в MIMO-системе;
на основе вектора принятых сигналов детектируют последовательно символы в установленном порядке и рассчитывают дисперсию ошибки в детектировании символа;
вычисляют эвклидово расстояние между детектированными символами и точками созвездия символов и определяют значения логарифма отношения правдоподобия (LLR) для оценки вероятности выходного бита (soft bit output);
формируют группу наиболее вероятных символов-кандидатов из точек символьного созвездия, при этом эвклидово расстояние на этапе n определяют через нормализованную сумму эвклидовых расстояний:  где di - эвклидово расстояние, вычисленное на предыдущем этапе для кандидата с индексом i, - оценка дисперсии ошибки детектирования символа на этапе n, dk - эвклидово расстояние между детектированным символом и точкой k сигнального созвездия, причем последнее расстояние вычисляют для всех точек созвездия и для каждого символа-кандидата из группы кандидатов, сформированной на предыдущем этапе, затем на основе минимума нормализованной эвклидовой суммы формируют новую группу символов-кандидатов, после чего удаляют символы-кандидаты из обновленного принятого вектора данных.
где di - эвклидово расстояние, вычисленное на предыдущем этапе для кандидата с индексом i, - оценка дисперсии ошибки детектирования символа на этапе n, dk - эвклидово расстояние между детектированным символом и точкой k сигнального созвездия, причем последнее расстояние вычисляют для всех точек созвездия и для каждого символа-кандидата из группы кандидатов, сформированной на предыдущем этапе, затем на основе минимума нормализованной эвклидовой суммы формируют новую группу символов-кандидатов, после чего удаляют символы-кандидаты из обновленного принятого вектора данных.
2. Способ по п.1, отличающийся тем, что порядок детектирования устанавливают в соответствии с процедурой MMSE-OSIC, и, соответственно, детектирование символа выполняют с использованием весовой матрицы MMSE.
3. Способ по п.1, отличающийся тем, что порядок детектирования устанавливают в соответствии с процедурой Zero-Forcing, и, соответственно, детектирование символа выполняют с использованием весовой матрицы Zero-Forcing.
4. Способ по п.1, отличающийся тем, что порядок детектирования устанавливают в соответствии с нисходящим порядком норм столбцов матрицы.
5. Способ по п.1, отличающийся тем, что вычисление эвклидова расстояния и значения LLR осуществляют по формуле:  где dp, dt обозначают нормализованную сумму эвклидова расстояния до точек сигнального созвездия, для которых i-й бит равен 0(Ap∈Si,0) и до точек, для которых i-й бит равен 1(At∈Si,1).
где dp, dt обозначают нормализованную сумму эвклидова расстояния до точек сигнального созвездия, для которых i-й бит равен 0(Ap∈Si,0) и до точек, для которых i-й бит равен 1(At∈Si,1).
6. Устройство детектирования сигнала в системах беспроводной связи с применением принципа многоантенной приемопередачи (MIMO), состоящее из последовательно соединенных модуля сортировки сигналов; модуля расчета весовых коэффициентов; модуля детектирования символов; модуля вычисления эвклидова расстояния и оценки значения логарифма отношения правдоподобия (LLR); модуля формирования групп кандидатов; модуля исключения символа-кандидата; причем на вход модуля сортировки сигналов поступает информация о параметрах канала между каждой Тх антенной и каждой Rx антенной, выход модуля сортировки сигналов подключен к первому входу модуля расчета весовых коэффициентов, на второй вход модуля расчета весовых коэффициентов поступает информация об отношении сигнал/шум, выход модуля расчета весовых коэффициентов подключен к первому входу модуля детектирования символов, на второй вход модуля детектирования символов поступает вектор принятого сигнала, выход модуля детектирования символов подключен к входу модуля вычисления эвклидова расстояния, первый выход которого подключен ко второму входу модуля детектирования символов через последовательно соединенные модуль формирования групп кандидатов и модуль исключения символа-кандидата, обновляющий вектор принятых данных с исключенным символом-кандидатом, обновленный вектор подается на вход модуля детектирования символов, символы, переданные различными Тх антеннами, детектируются последовательно, в соответствии с порядком, определенным модулем сортировки, а второй выход модуля вычисления эвклидова расстояния является источником данных об оценке логарифма отношения правдоподобия (LLR), при этом конструкция устройства отличается тем, что на вход модуля вычисления эвклидова расстояния поступает только информация о детектированном символе и об оценке дисперсии ошибки детектирования.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| RU 2006132156 A, 20.03.2008 | |||
| WO 9809381 A1, 05.03.1998 | |||
| Устройство для обработки деталей абразивной средой | 1982 |
|
SU1117197A1 |

