Область техники
Это изобретение относится, в целом, к охранным системам и применяемому в них детектору проникновения. В частности, это изобретение относится к оптоволоконным детекторам проникновения.
Уровень техники
Детекторы проникновения широко применяются в охранных системах для контроля границ заданной области для обнаружения присутствия, местоположения и движения людей или автомобилей. Иллюстративные области применения таких детекторов проникновения включают в себя контроль периметра государственных границ, военных объектов, химических заводов, аэропортов, вокзалов и исправительных учреждений. Одна из проблем, связанных с использованием этих детекторов, состоит в необходимости дистанционной эксплуатации в суровых условиях воздействия больших перепадов температур, а также дождя, снега и грязи.
Оптоволоконные датчики были разработаны для обнаружения проникновения. Достоинство оптоволоконного датчика состоит в том, что оптоволоконный чувствительный элемент является пассивным (не требует электропитания), что особенно важно для объектов, где находятся легковоспламеняющиеся материалы. Оптоволоконный чувствительный элемент также может обладать большой протяженностью (например, десятки километров). Оптоволоконный чувствительный элемент нечувствителен к электромагнитным воздействиям, которые, в противном случае, могли бы повредить его или создавать помехи в его работе. Кроме того, оптоволоконный чувствительный элемент легкодоступен по конкурентоспособной цене и будучи заключен в кабель повышенной прочности способен выдерживать суровые внешние условия.
Оптоволоконные системы обнаружения проникновения коммерчески доступны от Future Fibre Technologies Pty Ltd, Малгрейв, Виктория, Австралия и Fiber Sensys, Хилсборо, Орегон, США. Система от Future Fibre Technologies работает с использованием оптоволоконной петли, включающей в себя прямую линию и обратную линию. Прямая линия включает в себя два отдельных оптических волокна. Обратная линия включает в себя одно оптическое волокно. Два оптических волокна прямой линии образуют плечи интерферометра. Непрерывный лазерный свет проходит по двум плечам интерферометра. Свет, возвращающийся по обратной линии, анализируется. В отсутствие внешней помехи (движения, звука или вибрации), действующей на два плеча интерферометра, возвращаемый свет не будет изменяться. При наличии внешней помехи, действующей на два плеча интерферометра, возвращаемый свет будет изменяться и будет генерироваться интерференционная картина. Контроллер обнаруживает это изменение и интерпретирует эффект либо как событие проникновения, либо как воздействие окружающей среды. Система от Fiber Sensys вводит когерентный свет в многомодовое волокно. Мода света диспергирует по его длине и смешивается на конце волокна, приводя к возникновению характерного рисунка светлых и темных пятен, именуемых спеклами. Лазерный спекл стабилен, пока волокно остается неподвижным, но мигает, когда волокно вибрирует под воздействием окружающей среды (например, в результате движения человека или автомобиля вблизи него). Обнаружение проникновения осуществляется путем анализа картины спеклов в течение времени. В любой из упомянутых систем разрыв в оптоволоконном датчике полностью деактивирует систему обнаружения проникновения. Кроме того, система не может ни обнаружить, ни сообщить позицию разрыва волокна.
Альтернативный подход предложен в патенте США № 519484, Taylor и др. В системе Тейлора свет высококогерентного импульсного лазера запускается в чувствительное оптическое волокно. Когда отдельные импульсы распространяются в волокне в прямом направлении, нормальное рэлеевское рассеяние приводит к тому, что часть света рассеивается однородно, но малая его доля повторно захватывается волокном прежде, чем он начнет распространяться в обратном направлении к приемнику. Когерентная (узкополосная) природа запускаемых импульсов гарантирует различимую оптическую интерференцию между компонентами рассеянного света. Система анализирует сдвиги фазы и соответствующие временные задержки сигнала обратного рассеяния для получения пространственного распределения локальных нарушений вдоль чувствительного волокна. В статическом случае пространственное распределение является случайным, но стабильным. В динамическом случае (который может быть обусловлен, например, нарушением со стороны незаконного нарушителя или автомобиля) локальная картина изменяется. Такие изменения можно использовать для индикации проникновения и указания приблизительного местоположения проникновения вдоль чувствительного волокна. В этой системе разрыв в волокне сделал бы невозможным обнаружение проникновения в точках за разрывом. Подобные ограничения препятствуют распространению таких систем в областях применения, где защита играет ключевую роль, и дает возможность организованным группам (террористам, ворам и другим нежелательным третьим лицам) быстро деактивировать такие системы.
Таким образом, исходя из современного состояния техники требуются оптоволоконные системы обнаружения проникновения, способные безотказно работать в случае, когда происходит разрыв в чувствительном оптическом волокне системы.
Сущность изобретения
Задачей изобретения является обеспечение оптоволоконной системы обнаружения проникновения, способной безотказно работать в случае, когда происходит разрыв в чувствительном оптическом волокне системы.
Другой задачей изобретения является обеспечение оптоволоконной системы обнаружения проникновения, которая определяет и сообщает позицию такого разрыва.
В соответствии с этими задачами, которые будут подробно рассмотрены ниже, система обнаружения проникновения для контроля территории включает в себя, по меньшей мере, один оптический кабель, который заключает в себе, по меньшей мере, одно оптическое волокно и проходит вдоль границ территории. Средство оптической рефлектометрии во временной области (OTDR) оперативно подключено к противоположным первому и второму концам, по меньшей мере, одного оптического волокна. Средство OTDR включает в себя первую схему обработки сигнала, которая анализирует сигнал обратного рассеяния, принятый через первый конец, по меньшей мере, одного оптического волокна для обнаружения проникновения на территорию, и вторую схему обработки сигнала, которая анализирует сигнал обратного рассеяния, принятый через второй конец, по меньшей мере, одного оптического волокна для обнаружения проникновения на территорию. Избыточность решений относительно проникновения, принимаемых первой и второй схемами обработки сигнала, можно проверять. Система, предпочтительно, дополнительно включает в себя средство для обнаружения разрыва в, по меньшей мере, одном волокне, для определения местоположения разрыва, для сообщения пользователю местоположения разрыва и для включения сигнала тревоги, указывающего разрыв.
Очевидно, что описанные здесь оптоволоконные системы обнаружения проникновения обеспечивают непрерывную работу в случае, когда происходит разрыв в чувствительном оптическом волокне системы. Такие системы также сообщают позицию такого разрыва. Кроме того, описанные здесь оптоволоконные системы обнаружения проникновения можно использовать в самых разнообразных областях применения, например в охране государственных границ, военных объектов, химических заводов, аэропортов, вокзалов, исправительных учреждений, силового кабеля, туннеля, трубопровода, здания или других важных конструкций.
Согласно одному варианту осуществления изобретения средство OTDR включает в себя лазерный источник для генерации оптических импульсов, оптический детектор и направленный ответвитель и оптический переключатель, оперативно подключенные между лазерным источником и оптоволоконной парой. Направленный ответвитель и оптический переключатель совместно направляют оптические импульсы, генерируемые лазерным источником, по оптическим волокнам пары в режиме мультиплексирования с временным разделением и направляют рассеянный свет, который распространяется обратно по оптоволоконной паре, на оптический детектор в режиме мультиплексирования с временным разделением. Первая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через первый конец одного оптического волокна пары, для обнаружения проникновения на территорию. Вторая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через второй конец другого оптического волокна пары, для обнаружения проникновения на территорию.
Согласно еще одному варианту осуществления изобретения средство OTDR включает в себя первый лазерный источник для генерации оптических импульсов, первый оптический детектор и первый направленный ответвитель, оперативно подключенный между первым лазерным источником и первым концом одного оптического волокна оптоволоконной пары. Первый направленный ответвитель направляет оптические импульсы, генерируемые первым лазерным источником, по одному оптическому волокну и направляет рассеянный свет, который распространяется обратно по одному оптическому волокну, на первый оптический детектор. Первая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через одно оптическое волокно, для обнаружения проникновения на территорию. Средство OTDR также включает в себя второй лазерный источник для генерации оптических импульсов, второй оптический детектор и второй направленный ответвитель, оперативно подключенный между вторым лазерным источником и вторым концом другого оптического волокна оптоволоконной пары. Второй направленный ответвитель направляет оптические импульсы, генерируемые вторым лазерным источником, по другому оптическому волокну и направляет рассеянный свет, который распространяется обратно по другому оптическому волокну, на второй оптический детектор. Вторая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через другое оптическое волокно, для обнаружения проникновения на территорию.
Согласно еще одному варианту осуществления изобретения средство OTDR включает в себя первый лазерный источник для генерации оптических импульсов на первой длине волны, первый оптический детектор и первый направленный ответвитель, оперативно подключенный между первым лазерным источником и первым концом оптического волокна. Первый направленный ответвитель направляет оптические импульсы, генерируемые первым лазерным источником, по оптическому волокну и направляет рассеянный свет, который распространяется обратно по оптическому волокну, на первый оптический детектор. Первая схема обработки сигнала анализирует сигнал обратного рассеяния на первой длине волны, принятый через первый конец оптического волокна, для обнаружения проникновения на территорию. Средство OTDR также включает в себя второй лазерный источник для генерации оптических импульсов на второй длине волны, отличной от первой длины волны, второй оптический детектор и второй направленный ответвитель, оперативно подключенный между вторым лазерным источником и вторым концом оптического волокна. Второй направленный ответвитель направляет оптические импульсы, генерируемые вторым лазерным источником, по оптическому волокну и направляет рассеянный свет, который распространяется обратно по оптическому волокну, на второй оптический детектор. Вторая схема обработки сигнала анализирует сигнал обратного рассеяния на второй длине волны, принятый через второй конец оптического волокна, для обнаружения проникновения на территорию.
Дополнительные задачи и преимущества изобретения станут ясны специалистам в данной области техники из подробного описания, приведенного совместно с фигурами.
Краткое описание чертежей
Фиг.1 - схема оптоволоконной системы обнаружения проникновения согласно первому варианту осуществления настоящего изобретения.
Фиг.2 - функциональная блок-схема иллюстративных функций обработки сигнала и функций управления, осуществляемых оптоволоконной системой обнаружения проникновения, показанной на фиг.1.
Фиг.3 - схема оптоволоконной системы обнаружения проникновения согласно второму варианту осуществления настоящего изобретения.
Фиг.4 - функциональная блок-схема иллюстративных функций обработки сигнала и функций управления, осуществляемых оптоволоконной системой обнаружения проникновения, показанной на фиг.3.
Фиг.5 - схема оптоволоконной системы обнаружения проникновения согласно третьему варианту осуществления настоящего изобретения.
Фиг.6 - функциональная блок-схема иллюстративных функций обработки сигнала и функций управления, осуществляемых оптоволоконной системой обнаружения проникновения, показанной на фиг.5.
Подробное описание предпочтительных вариантов осуществления
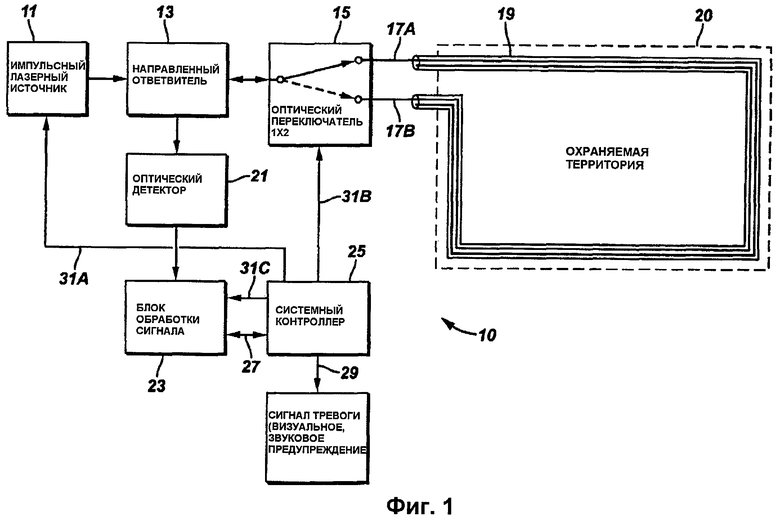
Как показано на фиг.1, система 10 обнаружения проникновения согласно первому варианту осуществления настоящего изобретения включает в себя оптический рефлектометр, действующий во временной области (OTDR) (элементы 11, 13, 15, 21, 23), который вводит последовательность оптических импульсов в противоположные концы двух оптических волокон 17A, 17B, и извлекает из этих же противоположных концов свет, который рассеивается обратно и отражается обратно от точек в волокнах, где показатель преломления изменяется. Свет обратного рассеяния измеряется и сохраняется как функция времени и анализируется для принятия решения о проникновении в отказоустойчивом режиме.
В частности, оптический рефлектометр, действующий во временной области, реализуется посредством лазерного источника 11, работающего в импульсном режиме, который запускает последовательность высококогерентных световых импульсов через направленный ответвитель 13 на оптический переключатель 15. Оптический переключатель 15 попеременно направляет световые импульсы, генерируемые лазерным источником 11, в два оптических волокна 17A, 17B в режиме мультиплексирования с временным разделением. Оптические волокна 17A, 17B образуют чувствительный элемент системы и заключены в оптоволоконный кабель 19, проложенный вдоль границ территории 20, которая подлежит контролю для обнаружения проникновения. Он может быть проложен вдоль государственных границ, вокруг военных объектов, химических заводов, аэропортов, вокзалов, исправительных учреждений, силового кабеля, туннеля, трубопровода, здания или других важных конструкций. Для трубопроводов оптоволоконный кабель 19 может быть проложен для контроля трассы трубопровода для обнаружения вторжения строительной техники на трассу трубопровода, прежде чем она повредит трубопровод. На одном конце оптоволоконного кабеля 19 волоконная оптика 17A подключена к оптическому переключателю 15, как показано. На другом конце оптоволоконного кабеля 19 волоконная оптика 17B подключена к оптическому переключателю 15, как показано. В этой конфигурации волоконная оптика 17A проходит вдоль границ территории 20, подлежащей мониторингу, в направлении по ходу часовой стрелки, и волоконная оптика 17B проходит вдоль границ территории 20, подлежащей мониторингу, в направлении против хода часовой стрелки. Когда импульс распространяется по одному оптическому волокну 17A или оптическому волокну 17B, его свет рассеивается посредством нескольких механизмов, включая флуктуации плотности и состава (рэлеевское рассеяние), а также молекулярные и объемные вибрации (рамановское и бриллюэновское рассеяние соответственно). Часть этого рассеянного света остается в сердцевине соответствующего волокна и направляется обратно к лазерному источнику 11. Этот возвращающийся свет проходит через оптический переключатель 15 на направленный ответвитель 13, где он направляется на оптический детектор 21.
Оптический детектор 21 преобразует принятый свет обратного рассеяния в электрический сигнал и усиливает электрический сигнал для вывода на блок 23 обработки сигнала. Сигнал, выдаваемый оптическим детектором 21, представляет интерференционную картину с подвижным временным окном для света обратного рассеяния из оптического волокна 17A и оптического волокна 17B. Такие интерференционные картины представляют интерференцию света обратного рассеяния из разных участков оптических волокон 17A и 17B. Если любое одно (или оба) из оптических волокон 17A, 17B испытывает воздействие акустической волны (или давления), которое может быть обусловлено, например, нарушением со стороны незаконного нарушителя или автомобиля, индуцируется локальное изменение эффективного показателя преломления соответствующего оптического волокна, которое приводит к изменению таких интерференционных картин в момент времени, соответствующий месту, где произошло нарушение. В течение периодов времени, когда оптический переключатель 15 подключен к оптическому волокну 17A, блок 23 обработки сигнала преобразует сигнал, выдаваемый оптическим детектором 21, в цифровую форму и обрабатывает такие цифровые данные в режиме разрешения по времени для определения изменений в интерференционной картине и принятия решения, произошло ли проникновение, на основании таких изменений интерференционной картины. Аналогично, в течение периодов времени, когда оптический переключатель 15 подключен к оптическому волокну 17B, блок 23 обработки сигнала преобразует сигнал, выдаваемый оптическим детектором 21, в цифровую форму и обрабатывает такие цифровые данные в режиме разрешения по времени для определения изменений в интерференционной картине и принятия решения, произошло ли проникновение, на основании таких изменений интерференционной картины. Системный контроллер 25 принимает данные от блока 23 обработки сигнала по линии 27 передачи данных между ними. Такие данные обеспечивают индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения.
В ходе нормальной работы, когда происходит проникновение, системный контроллер 25 принимает по линии 27 передачи данных данные о таком проникновении, полученные в результате обработки интерференционной картины оптического волокна 17A, а также данные о таком проникновении, полученные в результате обработки интерференционной картины оптического волокна 17B. Системный контроллер 25 может, в необязательном порядке, проверять избыточность таких данных и/или генерировать один или несколько сигналов тревоги на основании таких данных. Такие сигналы тревоги можно выводить по линии 29 передачи данных для инициирования звукового сигнала тревоги (например, звукового сообщения предупреждения или тона, воспроизводимого посредством громкоговорителя или звонка), визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения проникновения), и/или любого другого пригодного предупреждающего события.
Блок 23 обработки сигнала (и/или системный контроллер 25) может осуществлять операции обработки данных для анализа сигналов обратного рассеяния из двух оптических волокон 17A, 17B для автоматического обнаружения, что произошел разрыв в одном или обоих оптических волокнах 17A, 17B, и определения местоположения разрыва. Системный контроллер 25 может генерировать один или несколько сигналов тревоги в случае обнаружения разрыва. Такие сигналы тревоги можно выводить по линии 29 передачи данных для инициирования звукового сигнала тревоги, визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения разрыва) и/или любого другого пригодного предупреждающего события, представляющего разрыв. Такие сигналы тревоги получаются путем осуществления операций обработки сигнала для сигналов обратного рассеяния, которые возвращаются из каждого соответствующего оптического волокна (17A или 17B) по его длине между местом разрыва и оптическим переключателем 13.
Системный контроллер 25 также генерирует соответствующие сигналы хронирования для синхронизации операций мультиплексирования с временным разделением источника света 11, оптического переключателя 15 и блока 23 обработки сигнала, которые поступают туда по линиям управления 31A, 31B и 31C соответственно.
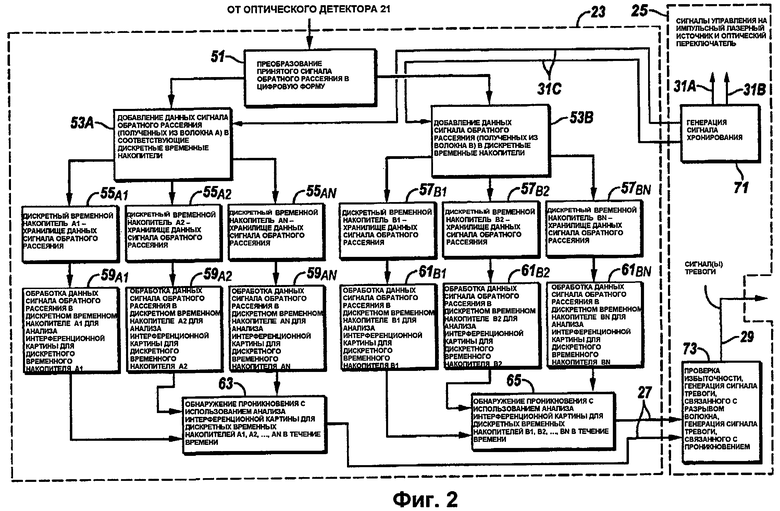
На фиг.2 показан иллюстративный вариант осуществления блока 23 обработки сигнала и системного контроллера 25. Блок 23 обработки сигнала включает в себя аналого-цифровой преобразователь 51, сопряженный с выходом оптического детектора 21. Аналого-цифровой преобразователь 51 дискретизирует электрический сигнал, выводимый из оптического детектора 21 на заранее определенной частоте дискретизации и преобразует выборки в цифровые слова, которые представляют зарегистрированные сигналы обратного рассеяния в цифровой форме. Логика 53A и 53B сохраняет цифровые слова, генерируемые преобразователем 51, в дискретных временных накопителях, соответствующих разным отрезкам двух оптических волокон 17A, 17B в режиме мультиплексирования с временным разделением. Хронирование таких операций хранения получается из сигналов управления, генерируемых блоком 71 генератора сигнала хронирования системного контроллера 25, и поступает туда по линии управления 31C. Дискретные временные накопители, обозначенные 55A1, 55A2, …, 55AN для оптического волокна 17A и 57B1, 57B2, …, 57BN для оптического волокна 17B соответствуют разным отрезкам двух оптических волокон 17A, 17B соответственно. Логические блоки 59A1, 59A2, …, 59AN оперируют с данными сигнала обратного рассеяния, хранящимися в соответствующих дискретных временных накопителях 55A1, 55A2,… 55AN, для анализа интерференционной картины в каждом соответствующем дискретном временном накопителе в течение времени. Аналогично, логические блоки 61B1, 61B2, …, 61BN оперируют с данными сигнала обратного рассеяния, хранящимися в соответствующих дискретных временных накопителях 57B1, 57B2, …, 57BN для анализа интерференционной картины в каждом соответствующем дискретном временном накопителе в течение времени. Изменение интерференционной картины в дискретном временном накопителе указывает наличие движения через контролируемый периметр в местоположении, соответствующем этому дискретному временному накопителю. В предпочтительном варианте осуществления логические блоки 59A1, 59A2, … , 59AN и логические блоки 61B1, 61B2, … , 61BN анализируют различие между интерференционной картиной в соответствующем дискретном временном накопителе и стационарной интерференционной картиной для соответствующего дискретного временного накопителя. Такие операции определения различий могут базироваться на операциях свертки, фазоразностных операциях, операциях БПФ, операциях фильтрации и/или других операциях, которые обычно используются для оптической рефлектометрии во временной области. Блок 63 использует анализ интерференционной картины на логических блоках 59A1, 59A2,… 59AN для принятия решения о проникновении, которое является решением, произошло ли проникновение. Аналогично, блок 65 использует анализ интерференционной картины на логических блоках 61B1, 61B2, …, 61BN для принятия решения о проникновении. Логика блоков 63 и 65 может использовать анализ характеристики для определения типа нарушителя, т.е. для различения между людьми, автомобилями и животными. Когда блок 63 или блок 65 определяет наличие проникновения, данные поступают на системный контроллер 25 по линии 27 передачи данных. Данные обеспечивают индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения.
Системный контроллер 25 принимает такие данные по линии 27 передачи данных и включает в себя логический блок 73, который может, в необязательном порядке, проверять избыточность таких данных и/или генерировать один или несколько сигналов тревоги на основании таких данных. Такие сигналы тревоги можно выводить по линии 29 передачи данных для инициирования звукового сигнала тревоги (например, звукового сообщения предупреждения или тона, воспроизводимого посредством громкоговорителя или звонка), визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения проникновения) и/или любого другого пригодного предупреждающего события.
Блок 23 обработки сигнала (как часть блоков 59, 61, 63, 65) и/или системный контроллер 25 (как часть логического блока 73) может осуществлять операции обработки данных для анализа сигналов обратного рассеяния из двух оптических волокон 17A, 17B для автоматического обнаружения, что произошел разрыв в одном или обоих оптических волокнах 17A, 17B, и определения местоположения разрыва. Системный контроллер 25 (как часть логического блока 25) может генерировать один или несколько сигналов тревоги в случае обнаружения разрыва. Такие сигналы тревоги можно выводить по линии 29 передачи данных для инициирования звукового сигнала тревоги, визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения разрыва) и/или любого другого пригодного предупреждающего события, представляющего разрыв. Такие сигналы тревоги получаются путем осуществления операций обработки сигнала для сигналов обратного рассеяния, которые возвращаются из каждого соответствующего оптического волокна (17A или 17B) по его длине, которая проходит от места разрыва до оптического переключателя 13.
Системный контроллер 25 также включает в себя блок 71 генератора сигнала хронирования, который генерирует соответствующие сигналы хронирования для синхронизации операций мультиплексирования с временным разделением источника света 11, оптического переключателя 15 и блока 23 обработки сигнала, которые поступают туда по линиям управления 31A, 31B и 31C соответственно.
Как показано на фиг.3, система 10' обнаружения проникновения согласно второму варианту осуществления настоящего изобретения включает в себя оптический рефлектометр, действующий во временной области (OTDR) (элементы 11A′, 13A′, 21A′, 23A′ 11B′, 13B′, 21B′, 23B′), который вводит последовательность оптических импульсов в противоположные концы двух оптических волокон 17A′, 17B′ и извлекает из этих же противоположных концов свет, который рассеивается обратно и отражается обратно от точек в волокнах, где показатель преломления изменяется. Свет обратного рассеяния измеряется и сохраняется как функция времени и анализируется для принятия решения о проникновении в отказоустойчивом режиме.
В частности, оптический рефлектометр, действующий во временной области, реализуется посредством первого лазерного источника 11A′, работающего в импульсном режиме, который запускает последовательность высококогерентных световых импульсов через первый направленный ответвитель 13A′ в оптическое волокно 17A′. Второй лазерный источник 11B′, работающий в импульсном режиме, запускает последовательность световых импульсов через второй направленный ответвитель 13B′ в оптическое волокно 17B′. Оптические волокна 17A′, 17B′ образуют чувствительный элемент системы и заключены в оптоволоконный кабель 19′, проложенный вдоль границ территории 20′, которая подлежит контролю для обнаружения проникновения. Он может быть проложен вдоль государственных границ, вокруг военных объектов, химических заводов, аэропортов, вокзалов, исправительных учреждений, силового кабеля, туннеля, трубопровода, здания или других важных конструкций. Для трубопроводов оптоволоконный кабель 19′ может быть проложен для контроля трассы трубопровода, для обнаружения вторжения строительной техники на трассу трубопровода, прежде чем она повредит трубопровод. На одном конце оптоволоконного кабеля 19′ оптическое волокно 17A′ подключено к первому направленному ответвителю 13A′. На другом конце оптоволоконного кабеля 19′ оптическое волокно 17B′ подключено ко второму направленному ответвителю 13B′, как показано. В этой конфигурации волоконная оптика 17A′ проходит вдоль границ территории 20′, подлежащей мониторингу, в одном направлении (слева направо), и волоконная оптика 17B проходит вдоль границ территории 20, подлежащей мониторингу, в противоположном направлении (справа налево). Когда импульс распространяется по одному оптическому волокну 17A′ или оптическому волокну 17B′, его свет рассеивается посредством нескольких механизмов, включая флуктуации плотности и состава (рэлеевское рассеяние), а также молекулярные и объемные вибрации (рамановское и бриллюэновское рассеяние соответственно). Часть этого рассеянного света остается в сердцевине соответствующего волокна и направляется обратно к соответствующим лазерным источникам 11A′, 11B′. Этот возвращающийся свет проходит через соответствующие направленные ответвители 13A′, 13B′, где он направляется на соответствующие оптические детекторы 21A′, 21B′.
Каждый из оптических детекторов 21A′, 21B′ преобразует принятый свет обратного рассеяния в электрический сигнал и усиливает электрический сигнал для вывода на соответствующие блоки 23A′, 23B′ обработки сигнала. Сигнал, выдаваемый оптическими детекторами 21A′, 21B′, представляет интерференционную картину с подвижным временным окном для света обратного рассеяния из оптического волокна 17A′ и оптического волокна 17B′ соответственно. Такие интерференционные картины представляют интерференцию света обратного рассеяния из разных участков оптических волокон 17A′ и 17B′. Если любое одно (или оба) из оптических волокон 17A′, 17B′ испытывает воздействие акустической волны (или давления), которое может быть обусловлено, например, нарушением со стороны незаконного нарушителя или автомобиля, индуцируется локальное изменение эффективного показателя преломления соответствующего оптического волокна, которое приводит к изменению таких интерференционных картин в момент времени, соответствующий месту, где произошло нарушение. Блок 23A′ обработки сигнала преобразует сигнал, выдаваемый оптическим детектором 21A′, в цифровую форму и обрабатывает такие цифровые данные в режиме разрешения по времени для определения изменений в интерференционной картине и принятия решения, произошло ли проникновение, на основании таких изменений интерференционной картины. Аналогично, блок 23B′ обработки сигнала преобразует сигнал, выдаваемый оптическим детектором 21B′, в цифровую форму и обрабатывает такие цифровые данные в режиме разрешения по времени для определения изменений в интерференционной картине и принятия решения, произошло ли проникновение, на основании таких изменений интерференционной картины.
Системный контроллер 25B′ принимает данные от блока 23B′ обработки сигнала, который обеспечивают индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения. Системный контроллер 25A′ принимает данные от блока 23A′ обработки сигнала, который обеспечивает индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения. Системный контроллер 25A′ передает такие данные на системный контроллер 25B′ по линии связи между ними, которая может представлять собой проводную или беспроводную линию связи.
В ходе нормальной работы, когда происходит проникновение, системный контроллер 25B′ принимает данные от блока 23A′ обработки сигнала, полученные в результате обработки интерференционной картины оптического волокна 17A′, а также данные от блока 23B′ обработки сигнала, полученные в результате обработки интерференционной картины оптического волокна 17B′. Системный контроллер 25B′ может, в необязательном порядке, проверять избыточность таких данных и/или генерировать один или несколько сигналов тревоги на основании таких данных. Такие сигналы тревоги можно выводить для инициирования звукового сигнала тревоги (например, звукового сообщения предупреждения или тона, воспроизводимого посредством громкоговорителя или звонка), визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения проникновения) и/или любого другого пригодного предупреждающего события.
Блоки обработки сигнала 23A′, 23B′ (и/или системный контроллер 25B′) могут осуществлять операции обработки данных для анализа сигналов обратного рассеяния из двух оптических волокон 17A′, 17B′ для автоматического обнаружения, что произошел разрыв в одном или обоих оптических волокнах 17A′, 17B′, и определения местоположения разрыва. Системный контроллер 25B′ может генерировать один или несколько сигналов тревоги в случае обнаружения разрыва. Такие сигналы тревоги можно выводить для инициирования звукового сигнала тревоги, визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги, и, возможно, визуальную индикацию местоположения разрыва) и/или любого другого пригодного предупреждающего события, представляющего разрыв. Такие сигналы тревоги получаются путем осуществления операций обработки сигнала для сигналов обратного рассеяния, которые возвращаются из каждого соответствующего оптического волокна (17A′ или 17B′) по его длине между местом разрыва и соответствующим направленным ответвителем (13A′ или 13B′).
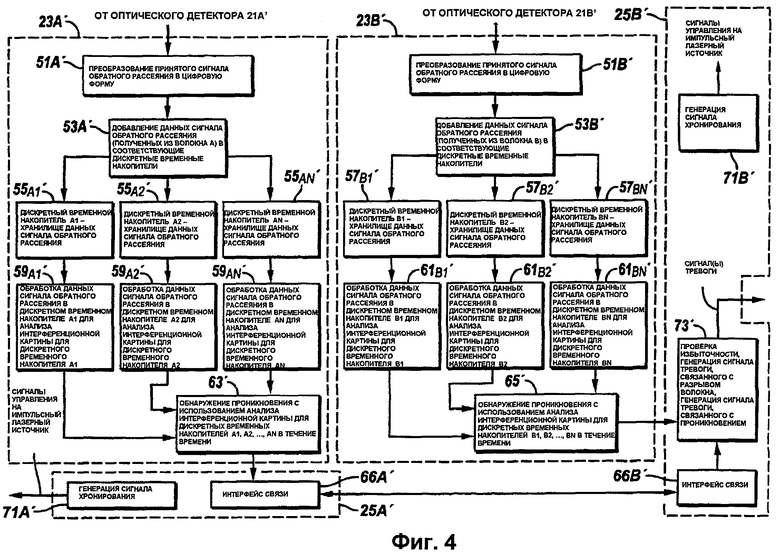
На фиг.4 показан иллюстративный вариант осуществления блока 23A′ обработки сигнала и системного контроллера 25A′, а также блока 23B′ обработки сигнала и системного контроллера 25B′. Блок 23A′ обработки сигнала включает в себя аналого-цифровой преобразователь 51A′, сопряженный с выходом оптического детектора 21A′. Аналого-цифровой преобразователь 51A′ дискретизирует электрический сигнал, выводимый из оптического детектора 21A′, на заранее определенной частоте дискретизации и преобразует выборки в цифровые слова, которые представляют зарегистрированные сигналы обратного рассеяния в цифровой форме. Логика 53A′ сохраняет цифровые слова, генерируемые преобразователем 51A′, в дискретных временных накопителях, соответствующих разным отрезкам первого оптического волокна 17A′. Дискретные временные накопители, обозначенные 55A1′, 55A2′, … , 55AN′ для оптического волокна 17A′, соответствуют разным отрезкам первого оптического волокна 17A′. Логические блоки 59A1′, 59A2′, …, 59AN′ оперируют с данными сигнала обратного рассеяния, хранящимися в соответствующих дискретных временных накопителях 55A1′, 55A2′, … , 55AN′, для анализа интерференционной картины в каждом соответствующем дискретном временном накопителе в течение времени. Изменение интерференционной картины в дискретном временном накопителе указывает наличие движения через контролируемый периметр в местоположении, соответствующем этому дискретному временному накопителю. В предпочтительном варианте осуществления логические блоки 59A1′, 59A2′, …, 59AN′ анализируют различие между интерференционной картиной в соответствующем дискретном временном накопителе и стационарной интерференционной картиной для соответствующего дискретного временного накопителя. Такие операции определения различий могут базироваться на операциях свертки, фазоразностных операциях, операциях БПФ, операциях фильтрации и/или других операциях, которые обычно используются для оптической рефлектометрии во временной области. Блок 63′ использует анализ интерференционной картины на логических блоках 59A1′, 59A2′, …, 59AN′ для принятия решения о проникновении, которое является решением, произошло ли проникновение.
Аналогично, блок 23B′ обработки сигнала включает в себя аналого-цифровой преобразователь 51B′, сопряженный с выходом оптического детектора 21B′. Аналого-цифровой преобразователь 51B′ дискретизирует электрический сигнал, выводимый из оптического детектора 21B′, на заранее определенной частоте дискретизации и преобразует выборки в цифровые слова, которые представляют зарегистрированные сигналы обратного рассеяния в цифровой форме. Логика 53B′ сохраняет цифровые слова, генерируемые преобразователем 51B′, в дискретных временных накопителях, соответствующих разным отрезкам первого оптического волокна 17B′. Дискретные временные накопители, обозначенные 57B1′, 57B2′, …, 57BN′ для оптического волокна 17B′, соответствуют разным отрезкам второго оптического волокна 17B′. Логические блоки 61B1′, 61B2′, …, 61BN′ оперируют с данными сигнала обратного рассеяния, хранящимися в соответствующих дискретных временных накопителях 57B1′, 57B2′, …, 57BN′ для анализа интерференционной картины в каждом соответствующем дискретном временном накопителе в течение времени. В предпочтительном варианте осуществления логические блоки 61B1′, 61B2′, …, 61BN′ анализируют различие между интерференционной картиной в соответствующем дискретном временном накопителе и стационарной интерференционной картиной для соответствующего дискретного временного накопителя. Такие операции определения различий могут базироваться на операциях свертки, фазоразностных операциях, операциях БПФ, операциях фильтрации и/или других операциях, которые обычно используются для оптической рефлектометрии во временной области. Блок 65′ использует анализ интерференционной картины на логических блоках 61B1′, …, 61B2′, …, 61BN′ для принятия решения о проникновении. Логика блоков 63′ и 65′ может использовать анализ характеристики для определения типа нарушителя, т.е. для различения между людьми, автомобилями и животными.
Когда блок 63′ обнаруживает проникновение, данные поступают на системный контроллер 25A′, который обеспечивает индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения. Системный контроллер 25A′ передает такие данные на системный контроллер 25B′ по линии связи между ними, поддерживаемой интерфейсами связи 66A′ и 66B′. Аналогично, когда блок 65′ обнаруживает проникновение, данные поступают на системный контроллер 25B′, который обеспечивает индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения.
Системный контроллер 25B′ принимает такие данные и включает в себя логический блок 73′, который может, в необязательном порядке, проверять избыточность таких данных и/или генерировать один или несколько сигналов тревоги на основании таких данных. Такие сигналы тревоги можно выводить для инициирования звукового сигнала тревоги (например, звукового сообщения предупреждения или тона, воспроизводимого посредством громкоговорителя или звонка), визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения проникновения) и/или любого другого пригодного предупреждающего события.
Блоки 23A′, 23B′ обработки сигнала (как часть блоков 59′, 61′, 63′, 65′) и/или системный контроллер 25B′ (как часть логического блока 73′) может осуществлять операции обработки данных для анализа сигналов обратного рассеяния из двух оптических волокон 17A′, 17B′ для автоматического обнаружения, что произошел разрыв в одном или обоих оптических волокнах 17A′, 17B′, и определения местоположения разрыва. Системный контроллер 25B′ (как часть блока 73′) может генерировать один или несколько сигналов тревоги в случае обнаружения разрыва. Такие сигналы тревоги можно выводить для инициирования звукового сигнала тревоги, визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения разрыва) и/или любого другого пригодного предупреждающего события, представляющего разрыв. Такие сигналы тревоги получаются путем осуществления операций обработки сигнала для сигналов обратного рассеяния, возвращающихся из каждого соответствующего оптического волокна (17A′ или 17B′), по его длине между местом разрыва и соответствующим направленным ответвителем (17A′ или 17B′).
Системные контроллеры 25A′ и 25B′ также включают в себя соответствующие блоки 71A′ и 71B′ генератора сигнала хронирования, которые генерируют соответствующие сигналы хронирования для управления импульсными источниками света 11A′, 11B′ соответственно.
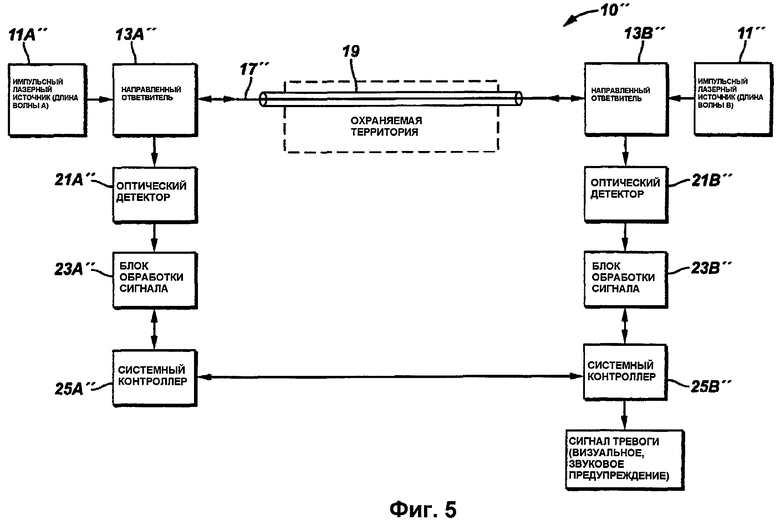
Как показано на фиг.5, система 10″ обнаружения проникновения согласно третьему варианту осуществления настоящего изобретения включает в себя оптический рефлектометр, действующий во временной области (OTDR) (элементы 11A″, 13A″, 21A″, 23A″, 11B″, 13B″, 21B″, 23B″), который вводит последовательность оптических импульсов на разных длинах волны в противоположные концы оптического волокна 17″, и извлекает из этих же противоположных концов свет, который рассеивается обратно и отражается обратно от точек в волокнах, где показатель преломления изменяется. Свет обратного рассеяния для двух длин волны измеряется и сохраняется как функция времени и анализируется для принятия решения о проникновении в отказоустойчивом режиме.
В частности, оптический рефлектометр, действующий во временной области, реализуется посредством первого лазерного источника 11A″, работающего в импульсном режиме, который запускает последовательность высококогерентных световых импульсов через первый направленный ответвитель 13A″ в оптическое волокно 17″. Второй лазерный источник 11B″, работающий в импульсном режиме, запускает последовательность световых импульсов через второй направленный ответвитель 13B″ в то же самое оптическое волокно 17″. Лазерный источник 11A″ работает на первой длине волны (λA), а лазерный источник 11B″ работает на второй длине волны (λB), отличной от первой длины волны (λA). Оптическое волокно 17″ образует чувствительный элемент системы и заключено в оптоволоконный кабель 19″, проложенный вдоль границ территории 20″, которая подлежит контролю для обнаружения проникновения. Он может быть проложен вдоль государственных границ, вокруг военных объектов, химических заводов, аэропортов, вокзалов, исправительных учреждений, силового кабеля, туннеля, трубопровода, здания или других важных конструкций. Для трубопроводов оптоволоконный кабель 19″ может быть проложен для контроля трассы трубопровода для обнаружения вторжения строительной техники на трассу трубопровода, прежде чем она повредит трубопровод. На одном конце оптоволоконного кабеля 19″ оптическое волокно 17″ подключено к первому направленному ответвителю 13A″. На другом конце оптоволоконного кабеля 19″ оптическое волокно 17″ подключено ко второму направленному ответвителю 13B″, как показано. Когда импульс распространяется по оптическому волокну 17″, его свет рассеивается посредством нескольких механизмов, включая флуктуации плотности и состава (рэлеевское рассеяние), а также молекулярные и объемные вибрации (рамановское и бриллюэновское рассеяние соответственно). Часть этого рассеянного света остается в сердцевине соответствующего волокна и направляется обратно к соответствующим лазерным источникам 11A″, 11B″. Этот возвращающийся свет проходит через соответствующие направленные ответвители 13A″, 13B″, где он направляется на соответствующие оптические детекторы 21A″, 21B″.
Каждый из оптических детекторов 21A″, 21B″ преобразует принятый свет обратного рассеяния в электрический сигнал и усиливает электрический сигнал для вывода на соответствующие блоки 23A″, 23B″ обработки сигнала. Сигнал, выдаваемый оптическими детекторами 21A″, представляет интерференционную картину с подвижным временным окном для света обратного рассеяния из оптического волокна 17″ для первой длины волны (λA). Сигнал, выдаваемый оптическими детекторами 21B″, представляет интерференционную картину с подвижным временным окном для света обратного рассеяния из оптического волокна 17″ для второй длины волны (λB). Такие интерференционные картины представляют интерференцию света обратного рассеяния из разных участков оптического волокна 17A″. Если оптическое волокно 17″ испытывает воздействие акустической волны (или давления), которое может быть обусловлено, например, нарушением со стороны незаконного нарушителя или автомобиля, индуцируется локальное изменение эффективного показателя преломления соответствующего оптического волокна, которое приводит к изменению таких интерференционных картин в момент времени, соответствующий месту, где произошло нарушение. Блок 23A″ обработки сигнала преобразует сигнал, выдаваемый оптическим детектором 21A″, в цифровую форму и обрабатывает такие цифровые данные в режиме разрешения по времени для определения изменений в интерференционной картине для первой длины волны (λA) и принятия решения, произошло ли проникновение, на основании таких изменений интерференционной картины. Аналогично, блок обработки сигнала 23B″ преобразует сигнал, выдаваемый оптическим детектором 21B″, в цифровую форму и обрабатывает такие цифровые данные в режиме разрешения по времени для определения изменений в интерференционной картине для второй длины волны (λB) и принятия решения, произошло ли проникновение, на основании таких изменений интерференционной картины.
Системный контроллер 25B″ принимает данные от блока обработки сигнала 23B″, который обеспечивает индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения. Системный контроллер 25A″ принимает данные от блока обработки сигнала 23A″, который обеспечивают индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения. Системный контроллер 25A″ передает такие данные на системный контроллер 25B″ по линии связи между ними, которая может представлять собой проводную или беспроводную линию связи.
В ходе нормальной работы, когда происходит проникновение, системный контроллер 25B″ принимает данные от блока 23A″ обработки сигнала, которые получаются путем обработки интерференционной картины для длины волны λA, а также данные от блока обработки сигнала 23B″, которые получаются путем обработки интерференционной картины для длины волны λB. Системный контроллер 25B″ может, в необязательном порядке, проверять избыточность таких данных и/или генерировать один или несколько сигналов тревоги на основании таких данных. Такие сигналы тревоги можно выводить для инициирования звукового сигнала тревоги (например, звукового сообщения предупреждения или тона, воспроизводимого посредством громкоговорителя или звонка), визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения проникновения), и/или любого другого пригодного предупреждающего события.
Блоки обработки сигнала 23A″, 23B″ (и/или системный контроллер 25B″) может осуществлять операции обработки данных для анализа сигналов обратного рассеяния для двух длин волны для автоматического обнаружения, что произошел разрыв в оптическом волокне 17″, и определения местоположения разрыва. Системный контроллер 25B″ может генерировать один или несколько сигналов тревоги в случае обнаружения разрыва. Такие сигналы тревоги можно выводить для инициирования звукового сигнала тревоги, визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения разрыва) и/или любого другого пригодного предупреждающего события, представляющего разрыв. Такие сигналы тревоги получаются путем осуществления операций обработки сигнала для сигналов обратного рассеяния, возвращающихся из оптического волокна 17″, по его длине между местом разрыва и соответствующим направленным ответвителем (13A″ или 13B″).
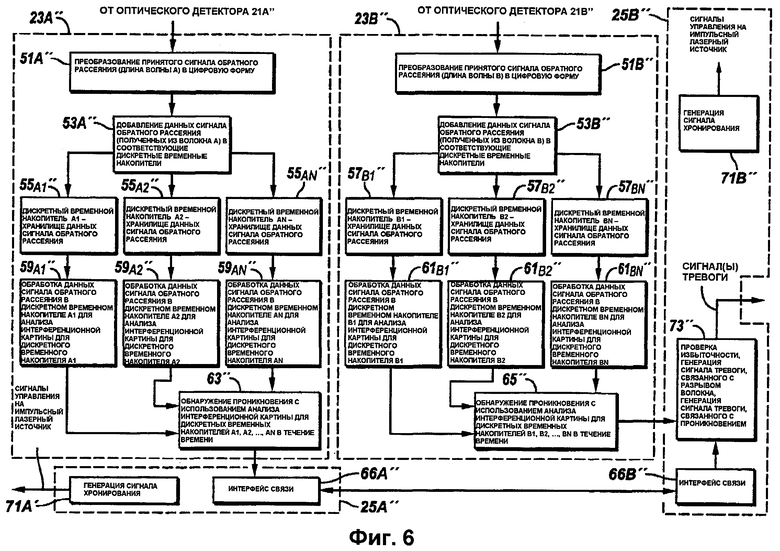
На фиг.6 показан иллюстративный вариант осуществления блока 23A″ обработки сигнала и системного контроллера 25A″, а также блока 23B″ обработки сигнала и системного контроллера 25B″. Блок 23A″ обработки сигнала включает в себя аналого-цифровой преобразователь 51A″, сопряженный с выходом оптического детектора 21A″. Аналого-цифровой преобразователь 51A″ дискретизирует электрический сигнал, выводимый из оптического детектора 21A″, на заранее определенной частоте дискретизации и преобразует выборки в цифровые слова, которые представляют зарегистрированные сигналы обратного рассеяния для первой длины волны λA в цифровой форме. Логика 53A″ сохраняет цифровые слова, генерируемые преобразователем 51A″ в дискретных временных накопителях, соответствующих разным отрезкам оптического волокна 17″. Дискретные временные накопители, обозначенные 55A1″, 55A2″, …, 55AN″, соответствуют разным отрезкам оптического волокна 17″ для первой длины волны λA. Логические блоки 59A1″, 59A2″,… 59AN″ оперируют с данными сигнала обратного рассеяния, хранящимися в соответствующих дискретных временных накопителях 55A1″, 55A2″,… 55AN″ для анализа интерференционной картины в каждом соответствующем дискретном временном накопителе в течение времени. Изменение интерференционной картины в дискретном временном накопителе указывает наличие движения через контролируемый периметр в местоположении, соответствующем этому дискретному временному накопителю. В предпочтительном варианте осуществления логические блоки 55A1″, 55A2″, … , 55AN″ анализируют различие между интерференционной картиной в соответствующем дискретном временном накопителе и стационарной интерференционной картиной для соответствующего дискретного временного накопителя. Такие операции определения различий могут базироваться на операциях свертки, фазоразностных операциях, операциях БПФ, операциях фильтрации и/или других операциях, которые обычно используются для оптической рефлектометрии во временной области. Блок 63″ использует анализ интерференционной картины на логических блоках 59A1″, 59A2″,… 59AN″ для принятия решения о проникновении, которое является решением, произошло ли проникновение.
Аналогично, блок 23B″ обработки сигнала включает в себя аналого-цифровой преобразователь 51B″, сопряженный с выходом оптического детектора 21B″. Аналого-цифровой преобразователь 51B″ дискретизирует электрический сигнал, выводимый из оптического детектора 21B′′, на заранее определенной частоте дискретизации и преобразует выборки в цифровые слова, которые представляют зарегистрированные сигналы обратного рассеяния для второй длины волны λB в цифровой форме. Логика 53B″ сохраняет цифровые слова, генерируемые преобразователем 51B″, в дискретных временных накопителях, соответствующих разным отрезкам оптического волокна 17″. Дискретные временные накопители, обозначенные 57B1′, 57B2′, …, 57BN′, соответствуют разным отрезкам оптического волокна 17″ для второй длины волны λB. Логические блоки 61B1″, 61B2″, …, 61BN″ оперируют с данными сигнала обратного рассеяния, хранящимися в соответствующих дискретных временных накопителях 57B1″, 57B2″, …, 57BN″ для анализа интерференционной картины в каждом соответствующем дискретном временном накопителе в течение времени. В предпочтительном варианте осуществления логические блоки 61B1″, 61B2″, …, 61BN″ анализируют различие между интерференционной картиной в соответствующем дискретном временном накопителе и стационарной интерференционной картиной для соответствующего дискретного временного накопителя. Такие операции определения различий могут базироваться на операциях свертки, фазоразностных операциях, операциях БПФ, операциях фильтрации и/или других операциях, которые обычно используются для оптической рефлектометрии во временной области. Блок 65″ использует анализ интерференционной картины на логических блоках 61B1″, 61B2″, …, 61BN″ для принятия решения о проникновении. Логика блоков 63″ и 65″ может использовать анализ характеристики для определения типа нарушителя, т.е. для различения между людьми, автомобилями и животными.
Когда блок 63″ обнаруживает проникновение, данные поступают на системный контроллер 25A″, который обеспечивает индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения. Системный контроллер 25A″ передает такие данные на системный контроллер 25B″ по линии связи между ними, поддерживаемой интерфейсами связи 66A″ и 66B″. Аналогично, когда блок 65″ обнаруживает проникновение, данные поступают на системный контроллер 25B″, который обеспечивает индикацию события проникновения, местоположения такого проникновения и, предпочтительно, метку времени, соответствующую времени проникновения. Системный контроллер 25B″ принимает такие данные и включает в себя логический блок 73″, который может, в необязательном порядке, проверять избыточность таких данных и/или генерировать один или несколько сигналов тревоги на основании таких данных. Такие сигналы тревоги можно выводить для инициирования звукового сигнала тревоги (например, звукового сообщения предупреждения или тона, воспроизводимого посредством громкоговорителя или звонка), визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения проникновения) и/или любого другого пригодного предупреждающего события.
Блок 23A″, 23B″ обработки сигнала (как часть блоков 59″, 61″, 63″, 65″) и/или системный контроллер 25B″ (как часть логического блока 73″) может осуществлять операции обработки данных для анализа сигналов обратного рассеяния для двух длин волны для автоматического обнаружения, что произошел разрыв в оптическом волокне 17″, и определения местоположения разрыва. Системный контроллер 25B″ может генерировать один или несколько сигналов тревоги в случае обнаружения разрыва. Такие сигналы тревоги можно выводить для инициирования звукового сигнала тревоги, визуального сигнала тревоги (например, обновления до дисплейного терминала, который обеспечивает визуальное сообщение тревоги и, возможно, визуальную индикацию местоположения разрыва) и/или любого другого пригодного предупреждающего события, представляющего разрыв. Такие сигналы тревоги получаются путем осуществления операций обработки сигнала для сигналов обратного рассеяния, возвращающихся из оптического волокна 17″, по его длине между местом разрыва и соответствующим направленным ответвителем (13A″ или 13B″).
Системные контроллеры 25A″ и 25B″ также включают в себя соответствующие блоки 71A″ и 71B″ генератора сигнала хронирования, которые генерируют соответствующие сигналы хронирования для управления импульсными источниками света 11A″, 11B″ соответственно.
Преимущественно, описанные здесь оптоволоконные системы обнаружения проникновения обеспечивают непрерывную работу в случае, когда происходит разрыв в чувствительном оптическом волокне системы. Такие системы также сообщают позицию такого разрыва. Кроме того, описанные здесь оптоволоконные системы обнаружения проникновения можно использовать в самых разнообразных областях применения, например в охране государственных границ, военных объектов, химических заводов, аэропортов, вокзалов, исправительных учреждений, силового кабеля, туннеля, трубопровода, здания или других важных конструкций.
Здесь было описано и проиллюстрировано несколько вариантов осуществления отказоустойчивой системы обнаружения проникновения, в которой применяется подсистема OTDR, и способов ее работы. Хотя были описаны конкретные варианты осуществления изобретения, они не призваны никоим образом ограничивать изобретение, и предполагается, что изобретение имеет настолько широкий объем, насколько позволяет техника, и то же относится к описанию изобретения. Таким образом, хотя раскрыты конкретные функции и способы обработки сигнала для обнаружения проникновения, возможны и другие функции и способы обработки сигнала для обнаружения проникновения. Кроме того, хотя раскрыты конкретные архитектуры системы, следует понимать, что можно использовать и другие архитектуры системы. Например, описанные здесь этапы обработки сигнала и/или этапы управления и тревожной сигнализации можно осуществлять на единой компьютерной платформе обработки или на распределенной компьютерной платформе обработки, что общеизвестно. Поэтому специалист в данной области техники может предложить разнообразные модификации заявленного изобретения, не выходя за рамки сущности и объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛЕННАЯ КОГЕРЕНТНАЯ РЕФЛЕКТОМЕТРИЧЕСКАЯ СИСТЕМА С ФАЗОВОЙ ДЕМОДУЛЯЦИЕЙ (ВАРИАНТЫ) | 2012 |
|
RU2530244C2 |
| СПОСОБ ОЦЕНКИ ВИБРАЦИОННЫХ ИЛИ АКУСТИЧЕСКИХ СИГНАЛОВ ВДОЛЬ ПРОТЯЖЕННЫХ ОБЪЕКТОВ НА БАЗЕ ВОЛОКОННО-ОПТИЧЕСКОГО КОГЕРЕНТНОГО РЕФЛЕКТОМЕТРА С АМПЛИТУДНОЙ И ФАЗОВОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО ИЗЛУЧЕНИЯ | 2016 |
|
RU2624594C1 |
| РАСПРЕДЕЛЕННЫЙ ОПТОВОЛОКОННЫЙ ДАТЧИК | 2009 |
|
RU2482449C2 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ СТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ, РАСПРОСТРАНЯЮЩИХСЯ ВО ВЗАИМНО ПРОТИВОПОЛОЖНЫХ НАПРАВЛЕНИЯХ, ДЛЯ ОПРЕДЕЛЕНИЯ ЛОКАЛИЗАЦИИ ВОЗМУЩЕНИЙ | 1999 |
|
RU2226270C2 |
| СПОСОБ МОНИТОРИНГА ВНУТРИСКВАЖИННЫХ ПАРАМЕТРОВ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ ДОБЫЧИ НЕФТИ | 2012 |
|
RU2509888C2 |
| Устройство сбора информации о величинах динамических воздействиях на гибкие конструкции и состояние концевых оптоволоконных извещателей | 2016 |
|
RU2648008C1 |
| Волоконно-оптическое устройство мониторинга трубопроводов | 2016 |
|
RU2637722C1 |
| СИСТЕМА РАСПРЕДЕЛЕННОГО АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ, ОСНОВАННАЯ НА ФАЗОЧУВСТВИТЕЛЬНОЙ ОПТИЧЕСКОЙ РЕФЛЕКТОМЕТРИИ ВО ВРЕМЕННОЙ ОБЛАСТИ БЕЗ ВЛИЯНИЯ КОЭФФИЦИЕНТА ОСЛАБЛЕНИЯ | 2018 |
|
RU2768226C1 |
| СПОСОБ ДИСТАНЦИОННОГО БЕСПРОБООТБОРНОГО ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ХИМИЧЕСКИХ ВЕЩЕСТВ И ОБЪЕКТОВ ОРГАНИЧЕСКОГО ПРОИСХОЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2567119C1 |
| СПОСОБ КОНТРОЛЯ ПОЛЯ ВИБРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2568417C1 |
Изобретение относится к охранным системам. Техническим результатом является повышение надежности обнаружения проникновения с определением позиции разрыва. Система обнаружения проникновения для контроля территории включает в себя, по меньшей мере, один оптический кабель, который заключает в себе, по меньшей мере, одно оптическое волокно и проходит вдоль границ территории, при этом средство оптической рефлектометрии во временной области оперативно подключено к противоположным первому и второму концам, по меньшей мере, одного оптического волокна. Указанное средство оптической рефлектометрии включает в себя первую схему обработки сигнала, которая анализирует сигнал обратного рассеяния, принятый через первый конец, по меньшей мере, одного оптического волокна для обнаружения проникновения на территорию, и вторую схему обработки сигнала, которая анализирует сигнал обратного рассеяния, принятый через второй конец, по меньшей мере, одного оптического волокна для обнаружения проникновения на территорию. Система также включает в себя средство для обнаружения разрыва в, по меньшей мере, одном волокне, для определения местоположения разрыва, для сообщения пользователю местоположения разрыва и для включения сигнала тревоги, указывающего разрыв. 2 н. и 13 з.п. ф-лы, 6 ил.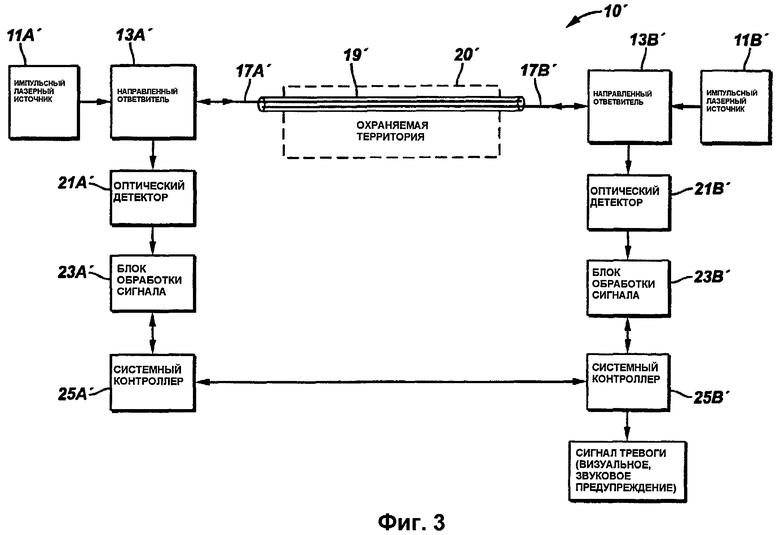
1. Система обнаружения проникновения для контроля территории, содержащая по меньшей мере, один оптический кабель, который проходит вдоль границ территории, причем, по меньшей мере, один оптический кабель содержит, по меньшей мере, одно оптическое волокно, имеющее первый конец, противоположный второму концу, и
средство оптической рефлектометрии во временной области, оперативно подключенное к первому и второму концам, по меньшей мере, одного оптического волокна, содержащее первую схему обработки сигнала, которая анализирует сигнал обратного рассеяния, принятый через первый конец, по меньшей мере, одного оптического волокна для обнаружения проникновения на территорию, и вторую схему обработки сигнала, которая анализирует сигнал обратного рассеяния, принятый через второй конец, по меньшей мере, одного оптического волокна для обнаружения проникновения на территорию.
2. Система обнаружения проникновения по п.1, дополнительно содержащая
средство управления, оперативно подключенное к первой схеме обработки сигнала и второй схеме обработки сигнала, для проверки избыточности решений о проникновении, принятых первой и второй схемами обработки сигнала.
3. Система обнаружения проникновения по п.2, в которой
упомянутое средство управления содержит первую часть, оперативно подключенную к упомянутому первому средству обработки сигнала,
вторую часть, оперативно подключенную к упомянутому второму средству обработки сигнала и расположенную на удалении от него, и средство связи для обмена данными между первой и второй частями.
4. Система обнаружения проникновения по п.1, дополнительно содержащая средство для обнаружения разрыва в, по меньшей мере, одном волокне.
5. Система обнаружения проникновения по п.1, содержащая оптический кабель, содержащий в себе пару оптических волокон, каждое из которых имеет первый конец, противоположный второму концу, причем первый конец одного оптического волокна оптоволоконной пары оперативно подключен к средству оптической рефлектометрии во временной области, и второй конец другого оптического волокна оптоволоконной пары оперативно подключен к средству оптической рефлектометрии во временной области.
6. Система обнаружения проникновения по п.5, в которой средство оптической рефлектометрии во временной области включает в себя лазерный источник для генерации оптических импульсов, оптический детектор, направленный ответвитель и оптический переключатель, оперативно подключенные между лазерным источником и оптоволоконной парой, который направляет упомянутые оптические импульсы по упомянутой оптоволоконной паре в режиме мультиплексирования с временным разделением и который направляет рассеянный свет, который распространяется обратно по упомянутой оптоволоконной паре, на упомянутый оптический детектор в режиме мультиплексирования с временным разделением, причем первая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через первый конец одного оптического волокна для обнаружения проникновения на территорию, и вторая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через второй конец другого оптического волокна, для обнаружения проникновения на территорию.
7. Система обнаружения проникновения по п.5, в которой средство оптической рефлектометрии во временной области включает в себя первый лазерный источник для генерации оптических импульсов, первый оптический детектор, первый направленный ответвитель, оперативно подключенный между упомянутым первым лазерным источником и упомянутым первым концом одного оптического волокна оптоволоконной пары, который направляет упомянутые оптические импульсы, генерируемые первым лазерным источником по одному оптическому волокну и который направляет рассеянный свет, который распространяется обратно по одному оптическому волокну, на упомянутый первый оптический детектор, причем первая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через одно оптическое волокно, для обнаружения проникновения на территорию, второй лазерный источник для генерации оптических импульсов, второй оптический детектор, и второй направленный ответвитель, оперативно подключенный между упомянутым вторым лазерным источником и другим оптическим волокном оптоволоконной пары, который направляет упомянутые оптические импульсы, генерируемые вторым лазерным источником, по другому оптическому волокну и который направляет рассеянный свет, который распространяется обратно по другому оптическому волокну, на упомянутый второй оптический детектор, причем вторая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через другое оптическое волокно, для обнаружения проникновения на территорию.
8. Система обнаружения проникновения по п.1, в которой средство оптической рефлектометрии во временной области включает в себя первый лазерный источник для генерации оптических импульсов на первой длине волны, первый оптический детектор, первый направленный ответвитель, оперативно подключенный между упомянутым первым лазерным источником и первым концом оптического волокна, который направляет упомянутые оптические импульсы, генерируемые первым лазерным источником, по оптическому волокну и который направляет рассеянный свет, который распространяется обратно по упомянутому оптическому волокну, на первый оптический детектор, причем упомянутая первая схема обработки сигнала анализирует сигнал обратного рассеяния на первой длине волны, принятый через первый конец оптического волокна, для обнаружения проникновения на территорию, второй лазерный источник для генерации оптических импульсов на второй длине волны, отличной от первой длины волны, второй оптический детектор, и
второй направленный ответвитель, оперативно подключенный между упомянутым вторым лазерным источником и вторым концом оптического волокна, который направляет упомянутые оптические импульсы, генерируемые вторым лазерным источником, по оптическому волокну и который направляет рассеянный свет, который распространяется обратно по упомянутому оптическому волокну, на упомянутый второй оптический детектор, причем вторая схема обработки сигнала анализирует сигнал обратного рассеяния на второй длине волны, принятый через второй конец оптического волокна для обнаружения проникновения на территорию.
9. Способ обнаружения проникновения на территорию, содержащий этапы, на которых
обеспечивают, по меньшей мере, один оптический кабель, который проходит вдоль границ территории, причем, по меньшей мере, один оптический кабель содержит, по меньшей мере, одно оптическое волокно, имеющее первый конец, противоположный второму концу, и подключают средство оптической рефлектометрии во временной области к первому и второму концам, по меньшей мере, одного оптического волокна, и используют средство оптической рефлектометрии во временной области для анализа сигнала обратного рассеяния, принятого через первый конец, по меньшей мере, одного оптического волокна, и для анализа сигнала обратного рассеяния, принятого через второй конец, по меньшей мере, одного оптического волокна, для обнаружения проникновения на территорию.
10. Способ по п.9, дополнительно содержащий этап, на котором проверяют избыточность решений о проникновении на основании анализа отдельных сигналов обратного рассеяния, принятых через первый и второй концы, по меньшей мере, одного оптического волокна.
11. Способ по п.9, дополнительно содержащий этап, на котором обнаруживают разрыв в, по меньшей мере, одном волокне на основании анализа отдельных сигналов обратного рассеяния, принятых через первый и второй концы, по меньшей мере, одного оптического волокна.
12. Способ по п.9, в котором по меньшей мере, один оптический кабель содержит оптический кабель, содержащий в себе пару оптических волокон, каждое из которых имеет первый конец, противоположный второму концу, причем первый конец одного из волокон оптоволоконной пары оперативно подключен к средству оптической рефлектометрии во временной области, и второй конец другого из волокон оптоволоконной пары оперативно подключен к средству оптической рефлектометрии во временной области.
13. Способ по п.12, в котором средство оптической рефлектометрии во временной области включает в себя лазерный источник для генерации оптических импульсов, оптический детектор, и направленный ответвитель и оптический переключатель, оперативно подключенные между упомянутым лазерным источником и упомянутой оптоволоконной парой, который направляет упомянутые оптические импульсы по упомянутой оптоволоконной паре в режиме мультиплексирования с временным разделением и который направляет рассеянный свет, который распространяется обратно по упомянутой оптоволоконной паре, на упомянутый оптический детектор в режиме мультиплексирования с временным разделением, причем первая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через первый конец одного оптического волокна, для обнаружения проникновения на территорию, и вторая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через второй конец другого оптического волокна, для обнаружения проникновения на территорию.
14. Способ по п.12, в котором средство оптической рефлектометрии во временной области включает в себя первый лазерный источник для генерации оптических импульсов, первый оптический детектор, первый направленный ответвитель, оперативно подключенный между упомянутым первым лазерным источником и первым концом одного оптического волокна упомянутой оптоволоконной пары, который направляет упомянутые оптические импульсы, генерируемые первым лазерным источником, по одному оптическому волокну и который направляет рассеянный свет, который распространяется обратно по одному оптическому волокну, на первый упомянутый оптический детектор, причем первая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через одно оптическое волокно, для обнаружения проникновения на территорию, второй лазерный источник для генерации оптических импульсов, второй оптический детектор, и второй направленный ответвитель, оперативно подключенный между упомянутым вторым лазерным источником и другим оптическим волокном оптоволоконной пары, который направляет упомянутые оптические импульсы, генерируемые вторым лазерным источником, по другому оптическому волокну и который направляет рассеянный свет, который распространяется обратно по другому оптическому волокну, на упомянутый второй оптический детектор, причем вторая схема обработки сигнала анализирует сигнал обратного рассеяния, принятый через другое оптическое волокно, для обнаружения проникновения на территорию.
15. Способ по п.9, в котором средство оптической рефлектометрии во временной области включает в себя первый лазерный источник для генерации оптических импульсов на первой длине волны, первый оптический детектор, первый направленный ответвитель, оперативно подключенный между упомянутым первым лазерным источником и первым концом упомянутого оптического волокна, который направляет упомянутые оптические импульсы, генерируемые первым лазерным источником, по оптическому волокну и который направляет рассеянный свет, который распространяется обратно по упомянутому оптическому волокну, на первый оптический детектор, причем упомянутая первая схема обработки сигнала анализирует сигнал обратного рассеяния на первой длине волны, принятый через первый конец оптического волокна, для обнаружения проникновения на территорию, второй лазерный источник для генерации оптических импульсов на второй длине волны, отличной от первой длины волны, второй оптический детектор, и второй направленный ответвитель, оперативно подключенный между упомянутым вторым лазерным источником и вторым концом оптического волокна, который направляет упомянутые оптические импульсы, генерируемые вторым лазерным источником, по упомянутому оптическому волокну и который направляет рассеянный свет, который распространяется обратно по упомянутому оптическому волокну, на второй оптический детектор, причем упомянутая вторая схема обработки сигнала анализирует сигнал обратного рассеяния на второй длине волны, принятый через второй конец оптического волокна, для обнаружения проникновения на территорию.
| JP 2000082187 А, 21.03.2000 | |||
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ СТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ, РАСПРОСТРАНЯЮЩИХСЯ ВО ВЗАИМНО ПРОТИВОПОЛОЖНЫХ НАПРАВЛЕНИЯХ, ДЛЯ ОПРЕДЕЛЕНИЯ ЛОКАЛИЗАЦИИ ВОЗМУЩЕНИЙ | 1999 |
|
RU2226270C2 |
| ОПТИЧЕСКИЙ РЕФЛЕКТОМЕТР | 2002 |
|
RU2214583C1 |
| Устройство для измерения затухания оптических кабелей | 1986 |
|
SU1427245A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

