Изобретение относится к области физических измерений, а именно к способам и измерительным средствам (пеленгаторам) для определения направления, с которого поступают инфразвуковые, звуковые и ультразвуковые колебания, не имеющие выраженной направленности.
Искусственную полынью создают для обеспечения аварийного всплытия подводного аппарата (подводной лодки) при подводном плавании в районах арктических морей, покрытых сплошным ледовым покровом. Способы создания искусственной полыньи описаны, например, в авт. св. N 312318 от 03.05.90.
Вместе с тем при осуществлении всплытия подводной лодки в искусственной полынье сложной задачей является определение ее координат и, главное, конфигурации, ибо в момент образования полыньи подводная лодка находится на достаточно большом удалении от нее, обеспечивающем безопасность подводной лодки, а оптимальные условия для всплытия в полынье реализуются, когда траектория подводной лодки проходит по диаметру полыньи при круговой форме полыньи или по отрезку максимальной длины полыньи при более сложной форме полыньи. Поэтому актуальной задачей является разработка такого способа подводной навигации, который обеспечивал бы выход подводной лодки на полынью по оптимальной траектории, исключающей необходимость многократного прохода под ней для определения ее конфигурации.
Известны способы подводной навигации, включающие измерение времени между излучением сигнала-запроса и приходом ответных сигналов от одиночных гидроакустических маяков-ответчиков, установленных на дне акватории в точках с известными координатами, вычисление дальности до маяков-ответчиков по измеренному времени и измерение пеленгов на маяки-ответчики с помощью специальной акустической антенны, установленной на подводном аппарате и состоящей из нескольких, расположенных определенным образом приемников, образующих "базу" (см. А.Л.Простаков. Электронный ключ к океану. Л.: Судостроение 1986, с. 30). Такой способ навигации называют способом навигации с использованием системы с короткой базой.
Для определения координат искусственной полыньи при использовании данного способа навигации после определения координат подводного аппарата необходимо обследовать полынью с помощью имеющихся на подводной лодке навигационных определителей разводьев (НОР) или навигационных определителей круговых (НОК), для чего необходимо пройти под полыньей и "присвоить" полынье координаты подводной лодки.
Основным достоинством способа является предельная простота определения места подводного аппарата относительно маяка-ответчика, сводящегося к нанесению на карту пеленга и дистанции по этому пеленгу. Системы с короткой базой широко используются при навигации подводных аппаратов, ведении подводных буровых работ, удержании места плавучими буровыми установками и во многих других случаях. Этот способ подводной навигации при базовом расстоянии порядка 10 м и при нахождении подводного аппарата в пределах окружности радиусом порядка 10% от глубины места под аппаратом обеспечивает погрешность определения места подводного аппарата относительно маяка-ответчика, не превышающую 1% от глубины установки маяка (см. А.Л.Простаков. Электронный ключ к океану. Л.: Судостроение, 1986, с. 30).
Однако решения-аналоги обладают следующими недостатками. Дальность удаления подводного аппарата от маяка-ответчика существенным образом влияет на точность определения координат аппарата, и при больших глубинах моря такой способ навигации становится неприемлемым для подводных лодок, глубина погружения которых ограничена. Кроме того, решения-аналоги не позволяют определить координаты искусственной полыньи без непосредственного обследования ее навигационным определителем разводьев, что требует прохода подводного аппарата под полыньей.
Отмеченные недостатки частично устранены в способе подводной навигации с использованием навигационной системы с гидроакустическими маяками с длинной базой (см. А.Л.Простаков. Электронный ключ к океану. Л.: Судостроение, 1986, с. 29) - прототип. Способ основан на запросе с подводного аппарата на одной частоте нескольких маяков-ответчиков, установленных на значительном расстоянии друг от друга в пределах 1-3 миль и от подводного аппарата на расстоянии дальности действия маяков-ответчиков (до 10 миль), и выдаче ответных сигналов маяками на присвоенных им частотах. Промежутки времени между излучением сигнала запроса и приходом ответных сигналов пропорциональны расстояниям от запросчика - подводного аппарата - до соответствующих маяков-ответчиков.
Принадлежность сигнала определенному маяку-ответчику обозначается его частотой. Полученные замеры расстояний используются для определения места подводного аппарата (подводной лодки) относительно системы маяков-ответчиков, географические координаты которых были определены в ходе их постановки.
Отсутствие необходимости измерения пеленга на маяк-ответчик и наличие нескольких отметок дальностей до соответствующих маяков-ответчиков в точке "обсервация" существенно увеличивают точность определения координат подводного аппарата при большой дальности до маяков-ответчиков, что позволяет применять такой способ подводной навигации при любой глубине места.
Однако недостаток, связанный с невозможностью дистанционно, не проходя под искусственной полыньей, определить с подводного аппарата координаты и конфигурацию этой полыньи, по-прежнему в указанном техническом решении не устраняется, что ограничивает технические возможности подводных аппаратов (подводных лодок) и не обеспечивает безопасность их плавания под тяжелыми паковыми льдами.
Задачей изобретения является устранение отмеченных недостатков, а именно обеспечение в процессе подводной навигации определения координат и конфигурации искусственной полыньи для аварийного всплытия подводного аппарата в ней без предварительного прохода под ней для обследования полыньи, в частности, с помощью навигационного определителя разводьев или навигационного определителя кругового.
Технический результат достигается выполнением новых операций и иной, отличной от решения-прототипа, последовательностью выполнения операций в способе подводной навигации, включающем измерение времени между излучением сигнала запроса и приходом ответных сигналов от системы маяков-ответчиков с известными координатами и частотами излучений, вычисление дальностей до маяков по измеренному времени и определение места подводного аппарата относительно маяков по вычисленным дальностям, а именно тем, что дополнительно определяют время начала и окончания образования полыньи, до начала образования полыньи определяют пеленги на маяки, расположенные за предполагаемым местом образования полыньи на безопасном удалении от него, после чего ведут счисление координат лучей, по которым распространяются сигналы от маяков до подводного аппарата, и время распространения сигналов, после образования полыньи многократно идентифицируют лучи в процессе движения подводного аппарата и посылок сигналов запроса по разнице времени прихода ответных сигналов и счисленным временем их прихода, в результате чего определяют координаты элементарных объемов воды, пересекаемых лучами, и определяют область полыньи путем селектирования элементарных объемов, пересекаемых лучами, по которым сигналы маяков регистрировались с искажениями во всех идентификациях, по координатам совокупности отселектированных элементарных объемов воды определяют координаты границ и центра искусственной полыньи.
В основе предложенного технического решения лежит идея регистрации неоднородностей водной среды, примыкающей к искусственной полынье, созданной подводным ядерным взрывом, и определения координат этих неоднородностей. При этом регистрация неоднородностей в предлагаемом решении осуществляется на основе методов гидроакустической реконструктивной томографии для конечного множества излучателей, в качестве которых используются гидроакустические маяки-ответчики, и одного приемника - гидроакустической станции подводного аппарата, принимающего излучения маяков-ответчиков в нескольких точках известной траектории подводного аппарата.
Так как распространение акустических колебаний в воде зависит от ее плотности и вязкости, являющихся функциями температуры, солености и насыщенности воды пузырьками воздуха и других газов, то в предлагаемом решении времени прохождения сигнала-запроса и сигналов маяков-ответчиков через водные слои, прилегающие к искусственной полынье, будут резко отличаться от прогнозируемого времени прохождения этих сигналов, рассчитанного для условий невозмущенных слоев воды. Критерием наличия на трассах прохождения сигналов после образования полыньи неоднородностей водной среды, принадлежащих области искусственной полыньи, является отличие времени прохождения сигналов, регистрируемого гидроакустической станцией подводного аппарата, от расчетного времени, определяемого в результате счисления в процессе движения подводного аппарата по известной траектории.
Интенсивное перемешивание воды при всплытии и пульсациях парогазового пузыря подводного ядерного взрыва, прогрев слоев воды, соприкасающихся с поверхностью пульсирующего парогазового пузыря, температура внутри которого в первые секунды после взрыва достигает миллионы градусов, а давление - сотни тысяч атмосфер, насыщение этих слоев газами, прорывающимися через границу раздела "парогазовый пузырь-вода", а также воздухом и обломками льда при обрушении взрывного султана - факторы, способствующие образованию под искусственной полыньей области существенной неоднородности параметров водной среды, резко контрастирующей на фоне невозмущенной водной среды вне этой области. Поэтому область неоднородностей параметров водной среды легко идентифицируется методами гидроакустической томографии.
Указанная область существования значительных градиентов температуры, солености и насыщенности воды пузырьками газов ограничена в горизонтальной плоскости размерами майны искусственной полыньи, так как размер майны соответствует размерам парогазового пузыря в момент его последней пульсации. По глубине данная область простирается от поверхности до глубины подрыва ядерного заряда - несколько десятков-сотен метров в зависимости от мощности взрыва. Диаметр горизонтального сечения области неоднородностей водной среды составляет порядка 200-500 м.
Разрешающая способность системы гидроакустических буев ДИБУС, предназначенной для измерения флуктуаций амплитуды, фазы и времени распространения гидроакустических сигналов, вызванных наличием неоднородностей на пути их распространения, как известно, позволяет регистрировать различия параметров водной среды, составляющие всего доли градусов для температуры и доли промилле для солености (см. Л.А.Простаков. Электронный ключ к океану. Л.: Судостроение, 1986, с. 90). В предложенном же решении различия в параметрах водной среды могут быть на два порядка выше, нежели различия, выявляемые вышеуказанной системой буев ДИБУC, что указывает на возможность работы предлагаемого решения в более благоприятных условиях и, следовательно, с большей эффективностью.
Покажем существенность отличительных признаков.
Операции определения времени начала и окончания образования полыньи в решениях-аналогах и решении-прототипе не выполняются. Их выполнение в предлагаемом решении обеспечивает возможность определения разделения периода времени, соответствующего времени образования полыньи, когда шумы, источниками которых являются подводный ядерный взрыв, пульсация парогазового пузыря, ломающийся лед и обрушивающийся султан, столь интенсивны, что заглушают любые полезные сигналы, которые могли бы быть зарегистрированы гидроакустической станцией подводного аппарата. Кроме того, определение времени начала образования полыньи обеспечивает определение предельного времени существования невозмущенной водной среды в предполагаемом месте образования полыньи, в течение которого еще возможно вычисление "базовых" значений времени распространения сигналов от маяков-ответчиков до подводного аппарата в невозмущенной водной среде и их последующее счисление в процессе движения подводного аппарата. Возобновление излучения сигналов-запросов и прием ответных сигналов от маяков-ответчиков сразу после момента окончания образования полыньи обеспечивают возможность уменьшения ошибок счисления координат лучей, по которым распространяются сигналы, а также позволяют идентифицировать лучи, пересекающие область полыньи при максимальных градиентах изменения в ней параметров водной среды.
Определение пеленгов на маяки-ответчики в решении-прототипе не выполняется, хотя после определения места подводного аппарата при известных координатах маяков-ответчиков эта операция может быть выполнена автоматически. Определение пеленгов на маяки-ответчики до начала образования полыньи в предлагаемом решении обеспечивает возможность определения координат лучей, по которым распространяются сигналы маяков-ответчиков до подводного аппарата, и их последующее счисление.
Маяки-ответчики для определения места подводного аппарата в решениях-аналогах и прототипе выбираются произвольно, лишь бы дальность их действия обеспечивала надежный прием их сигнала. В предлагаемом решении искусственная полынья должна находиться между маяками-ответчиками и подводным аппаратом, чтобы лучи, по которым распространяются сигналы маяков-ответчиков до подводного аппарата, как можно чаще проходили через трубку траекторий частиц воды, захватываемых всплывающим парогазовым пузырем. Именно эта трубка траекторий и является областью неоднородностей параметров водной среды.
Отличительным признакам предлагаемого решения является и выбор маяков-ответчиков, не поражаемых факторами подводного взрыва, осуществляемого для образования полыньи.
Счисление координат лучей, по которым распространяются сигналы от маяков-ответчиков до подводного аппарата и времени их распространения в процессе движения подводного аппарата, - операция для решений-аналогов и прототипа новая, хотя эта операция выполняется при моделировании процессов распространения акустических сигналов в водной среде [см., например, В.М. Матвиенко и Ю.Ф.Тарасюк. Дальность действия гидроакустических средств. Л.: Судостроение, 1976, с. 133]. В предложенном решении выполнение этой операции позволяет "сохранить" в памяти гидроакустической станции подводного аппарата времена распространения сигналов от маяков-ответчиков применительно к невозмущенной водной среде для любой точки траектории подводного аппарата, когда эту среду уже "возмутили" факторы, сопутствующие образованию искусственной полыньи, а также в этих условиях пеленги на маяки-ответчики, включая и те из них, от которых сигналы приходят с искажениями или вовсе не регистрируются.
Операция многократного идентифицирования лучей в процессе движения подводного аппарата и посылок сигналов запроса по разнице времени прихода ответных сигналов и счисления временем их прихода, осуществляемая после образования полыньи, обеспечивает выявление лучей, пересекающих возмущенную область водной среды, то есть область, примыкающую к полынье.
Операция определения координат элементарных объемов воды, пересекаемых лучами, является новой при проведении подводной навигации. Выполнение этой операции обеспечивает локализацию области возможных положений искусственной полыньи в границах, образуемых проекциями на поверхность моря траектории подводного аппарата, линии, соединяющей маяки-ответчики, и пеленгов на крайние маяки-ответчики на момент окончания образования полыньи.
Определение области полыньи путем селектирования элементарных объемов, пересекаемых лучами, по которым сигналы маяков регистрировались с искажениями во всех идентификациях, является новой операцией для решений-аналогов и прототипа. Ее выполнение обеспечивает последовательное, по идентификациям, исключение из области возможных положений полыньи, определенной в результате выполнения предыдущей операции, областей "чистой", не возмущенной водной среды, пересекаемых лучами, по которым сигналы от маяков-ответчиков приходят без искажений.
Операция определения по координатам совокупности отселектированных элементарных объемов воды координат границ и центра горизонтального сечения области полыньи для прикладной математики операция известная, но она является новой для решений-аналогов и прототипа. Ее выполнение обеспечивает определение местоположения полыньи и ее конфигурации.
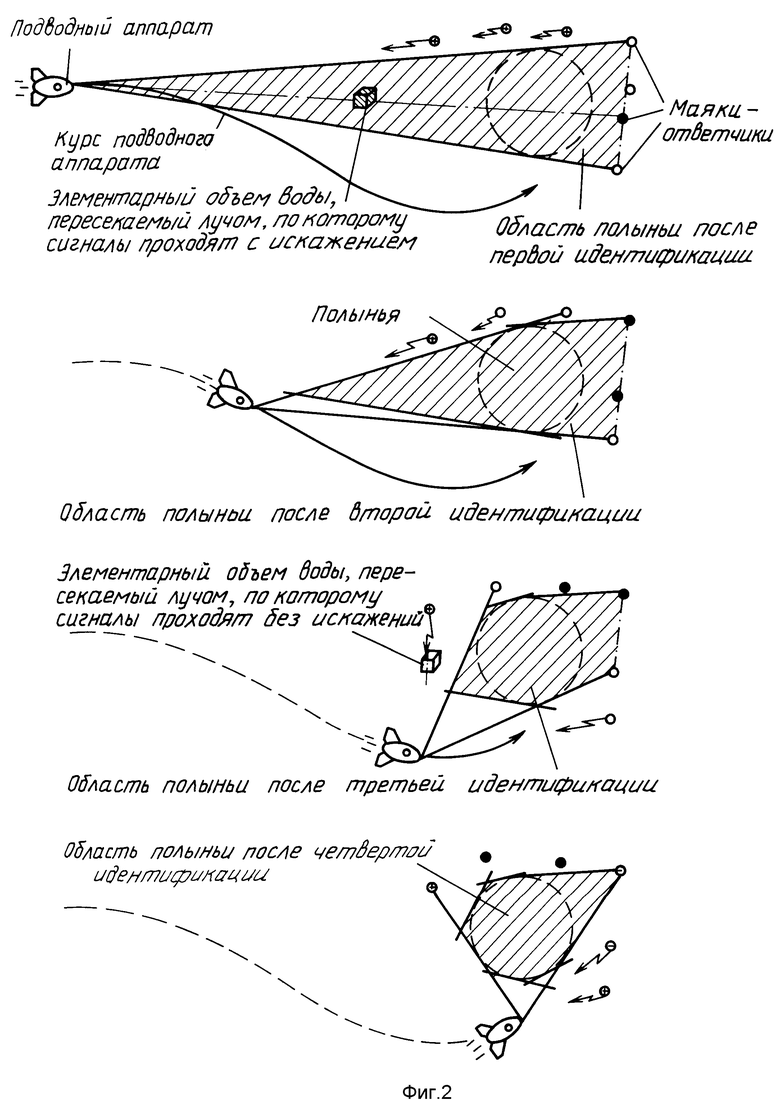
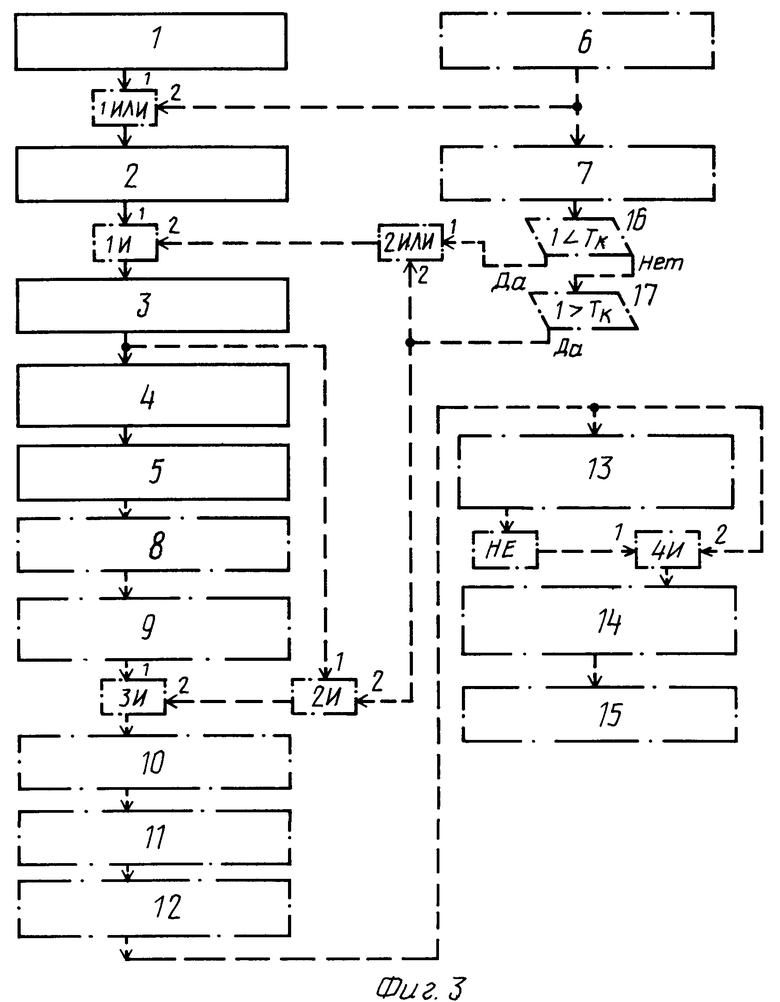
На фиг. 1 представлен процесс определения координат полыньи; на фиг. 2 показаны операции идентификации лучей, по которым распространяются сигналы от маяков-ответчиков, и операция определения области полыньи в процессе движения подводного аппарата и селектирования лучей, по которым сигналы регистрировались с искажениями; на фиг. 3 изображена принципиальная блок-схема решения.
Принципиальная блок-схема предложенного решения, представленная на фиг. 3, содержит следующие блоки, характеризующие операции, выполняемые в прототипе: блок 1 - выбор маяков-ответчиков для определения координат подводного аппарата, блок 2 - излучение сигнала запроса гидроакустической станцией подводного аппарата, блок 3 - прием ответных сигналов от маяков-ответчиков на частотах, соответствующих частотам, присвоенным маякам-ответчикам, блок 4 - регистрация времени приема ответных сигналов и определение расстояний до маяков-ответчиков по известной скорости распространения звука в воде в данном районе моря, блок 5 - определение координат подводного аппарата как координаты точки пересечения окружностей с центрами в известных точках местонахождения маяков-ответчиков и с радиусами, соответствующими расстояниям до маяков-ответчиков.
Дополнительно к указанным операциям в предложенном техническом решении выполняются следующие операции, представленные на фиг. 3 блоками.
Блок 6 - выбор маяков-ответчиков для определения координат полыньи. Маяки-ответчики выбираются с таким расчетом, чтобы подводный аппарат и маяки-ответчики находились по разные стороны относительно предполагаемого места образования полыньи. Кроме того, выбираются маяки, находящиеся на безопасном расстоянии от места образования полыньи (см. фиг. 1).
Блок 7 - определение времени начала и времени окончания образования полыньи. При этом время начала образования полыньи определяется из соотношения
Tн = Dстр/Vт,
где
Tн - время начала образования полыньи, c;
Dстр - дальность хода торпеды до взрыва ее боевой части, м;
Vт - средняя скорость торпеды, м/с.
Время окончания образования полыньи может быть определено из соотношения
Tк = Tн + 2,4 q1/6, (2)
где
Tк - время окончания образования полыньи, с;
q - мощность боевой части торпеды, т.
С целью получения максимальных размеров полыньи взрыв боевой части торпеды осуществляют на глубине Hопт[м], определяемой из соотношения
Блок 8 - определение пеленгов на маяки-ответчики. Эти пеленги могут быть определены из соотношения
где
α - истинный пеленг, град;
λПА,λМ - соответственно широта точки местонахождения подводного аппарата и маяка-ответчика, град;
λПА,λМ - соответственно долгота точки местонахождения подводного аппарата и маяка-ответчика.
Блок 9 - счисление координат лучей, по которым распространяются сигналы маяков-ответчиков, и времени приема сигналов.
Координатами лучей, по которым распространяются сигналы от маяков-ответчиков, очевидно, являются текущие пеленги на соответствующие маяки-ответчики и расстояния до них. При этом пеленги вычисляются по зависимости (4) для изменяющихся по мере движения подводного аппарата текущих его координат (ϕПA-λПА) , определяемых гироинерциальной системой управления подводного аппарата. Расстояния до маяков-ответчиков могут быть определены, в частности, из соотношения ,
,
где
D - расстояние до маяка-ответчика, км;
(ϕМ-ϕПА) - разность широт маяка-ответчика подводного аппарата, угловые минуты.
Счисленное время приема сигнала от маяка-ответчика может быть определено из соотношения
tс = 2D/Vзв, (6)
где
tс - счисленное (прогнозируемое) время регистрации сигнала (после излучения сигнала запроса), с;
Vзв - скорость звука в воде, км/с.
Блок 10 - регистрация времен прихода сигналов от маяков-ответчиков.
Блок 11 - идентификация лучей по разнице времени приема сигналов и счисленного времени.
Если время приема сигнала совпадает со счисленным временем, то принимается, что сигнал пришел без искажения. Если же эти времена не совпадают (в том числе, и если ответный сигнал не был зарегистрирован), то принимается, что сигнал пришел с искажениями.
Блок 12 - определение координат элементарных объемов воды, пересекаемых лучами (см. фиг. 2).
Блок 13 - определение элементарных объемов воды, пересекаемых лучами, по которым сигналы распространяются без искажений.
Блок 14 - определение элементарных объемов воды, пересекаемых лучами, по которым сигналы распространяются с искажениями. Совокупность таких элементарных объемов воды, оставшаяся после последней идентификации лучей, и будет являться областью, принадлежащей полынье.
Блок 15 - определение координат границ и центра полыньи.
При этом координаты центра искусственной полыньи могут быть определены из соотношений
где
λцп и ϕцп - соответственно долгота и широта центра полыньи, град;
Si - площадь горизонтального сечения отселектированного i-го элементарного объема воды, принадлежащего области полыньи, м2;
λi и ϕi - соответственно долгота и широта i-го элементарного объема воды, град.
Координаты границ полыньи, то есть ее конфигурация, определяются путем определения координат огибающих область полыньи отселектированных элементарных объемов воды.
Блок 16 - сравнение текущего времени с временем начала образования полыньи.
Блок 17 - сравнение текущего времени с временем окончания образования полыньи.
Схема на фиг. 3 функционирует следующим образом. В условиях подледного плавания, когда поверхность воды покрыта тяжелыми льдами, препятствующими всплытию подводного аппарата, и имеется необходимость всплытия, на подводном аппарате посредством выполнения новых операций осуществляют выбор маяков-ответчиков для определения координат искусственно созданной полыньи (блок 6) и определяют время начала и окончания образования этой полыньи (блок 7). Далее до момента начала образования полыньи определяют координаты подводного аппарата, как это осуществляют и в решении-прототипе (то есть выполняют операции, представленные блоками 1-5). Возможность выполнения этих операций обеспечивается наличием сигнала на втором входе первого логического блока И в любое время, за исключением периода, когда Tн ≤ t ≤ Tк.
При этом для определения координат подводного аппарата возможно использование любых маяков-ответчиков, находящихся на расстоянии их "слышимости" (задействуются оба входа первого логического блока ИЛИ). Далее выполняются новые операции, представленные на фиг. 3 блоками 8 и 9. При текущем времени, превышающем значение времени окончания образования полыньи, на втором входе второго логического блока И присутствует сигнал. Поэтому возможно выполнение новых операций, представленных на фиг. 3 блоками 10-13. При каждом выполнении операций по идентификации лучей (блок 11) и определению элементарных объемов, пересекаемых этими лучами (блоки 13 и 14), из области, принадлежащей полынье, исключаются элементарные объемы чистой невозмущенной воды (на вход блока 14 поступает сигнал только в том случае, когда на выходе блока 13 сигнал отсутствует). После последней идентификации лучей (см. фиг. 2) в блоке 14 "остается" совокупность элементарных объемов воды, считающаяся принадлежащей области искусственной полыньи.
В блоке 15 определяются координаты центра тяжести плоской фигуры сложной формы по известной математической зависимости (7). Этот центр тяжести и принимается за центр искусственной полыньи. Координаты линии, образованной "огибающими" область полыньи элементарными объемами воды, принимаются за координаты границы полыньи.
Таким образом, на основе анализа структуры и функционирования схемы предложенного решения можно заключить, что способ, в котором реализовано данное решение, обладает преимуществами, отвечающими цели изобретения.
Предложение реализовано в виде имитационной модели, подтвердившей при ее испытании возможность определения координат границ и центра искусственной полыньи дистанционно из подводного аппарата без предварительного прохода аппаратом под полыньей для определения ее параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК | 1997 |
|
RU2125733C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 2019 |
|
RU2717578C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ПРИ НАХОЖДЕНИИ ПОДВОДНОГО ОБЪЕКТА НА ГОРИЗОНТЕ ПЛАВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГИДРОАКУСТИЧЕСКОГО КАНАЛА ПЕРЕДАЧИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2008 |
|
RU2398316C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
Изобретение относится к подводной навигации и может быть использовано для определения координат искусственной полыньи. Достигаемый технический результат - определение конфигурации и координат искусственной полыньи для аварийного всплытия подводного аппарата. Способ предусматривает измерение времени между запросным сигналом и ответными сигналами маяков-ответчиков с известными координатами, вычисление дальностей до них и определение места подводного аппарата относительно маяков-ответчиков, а также определение пеленгов на маяки-ответчики, расположенные за предполагаемым местом образования полыньи. После образования полыньи идентифицируют лучи распространения ответных сигналов, определяют координаты элементарных объемов воды, пересекаемых лучами, и определяют место полыньи по координатам совокупности отселектированных элементарных объемов воды. 3 ил.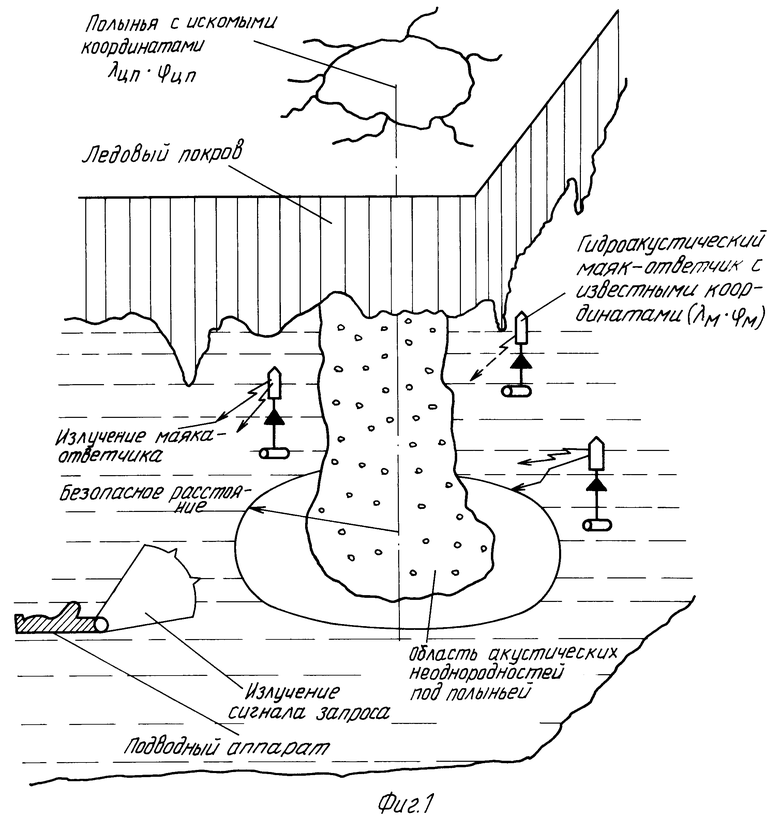
Способ подводной навигации при определении координат искусственной полыньи, включающий измерение времени между излучением сигнала запроса и приходом ответных сигналов от системы маяков-ответчиков с известными координатами и частотами излучений, вычисление дальностей до маяков по измеренному времени и определение места подводного аппарата относительно маяков по вычисленным дальностям, отличающийся тем, что дополнительно определяют время начала и окончания образования полыньи, до начала образования полыньи определяют пеленги на маяки, расположенные за предполагаемым местом образования полыньи на безопасном удалении от него, после чего ведут счисление координат лучей, по которым распространяются сигналы от маяков до подводного аппарата и время распространения сигналов, после образования полыньи многократно идентифицируют лучи в процессе движения подводного аппарата и посылок сигналов запроса по разнице времени прихода ответных сигналов и счисленным временем их прихода, в результате чего определяют координаты элементарных объемов воды, пересекаемых лучами, и определяют область полыньи путем селектирования элементарных объемов, пересекаемых лучами, по которым сигналы маяков регистрировались с искажениями во всех идентификациях, по координатам совокупности отселектированных элементарных объемов воды определяют координаты границ и центра искусственной полыньи.
| Простаков А.Л | |||
| Электронный ключ к океану.-Л.: Судостроение, 1986, с | |||
| Солесос | 1922 |
|
SU29A1 |
