Цифровая обработка изображений является важным направлением применения современной цифровой вычислительной техники, с целью решения задач автоматизированного управления и контроля, повышения визуального качества, повышения достоверности оценки параметров объектов и структур. Большинство методов цифровой обработки, для выделения одномерных сигналов на фоне аддитивных шумов, в ряде случаев могут обобщаться на многомерный случай, к которым относятся сигналы статических изображений. В процессе передачи и преобразования посредством радиотехнических систем изображения подвергаются воздействию различных помех, что в ряде случаев приводит к ухудшению визуального качества и потере участков изображений (групп пикселей). В связи с этим, актуальной является задача восстановления изображений - ослабление шума, реставрация (удаление царапин, пятен, пыли и прочих дефектов) и экстраполяция пикселей изображения.
При решении задач обработки изображений с целью ослабления действующих аддитивных помех рассматривается модель изображения, которая представляет собой двумерную дискретную последовательность Yi,j,  ,
,  вида:
вида:

где Si,j - полезная двумерная составляющая (исходное неискаженное изображение), ηi,j - аддитивная шумовая составляющая, ei,j - значения импульсного шума, N - количество строк, М - количество столбцов двумерного массива изображения.
Цель данного изобретения - обнаружение значений импульсного шума εi,j в реализации цифрового изображения Yi,j и их устранение в условиях недостаточной априорной информации о статистических характеристиках аддитивного ηi,j и импульсного шума εi,j. Предполагается, что статистические характеристики аддитивного шума ηi,j и импульсного шума εi,j существенно различаются.
Изображение можно рассматривать как прямоугольную матрицу Y={Yi,j}, со строками i и столбцами j, где N и М - определяют размер матрицы изображения в пикселях. Одной из первичных решаемых задач в цифровой обработке сигналов является ослабление действующих аддитивных и мультипликативных импульсных помех (1). Для решения этих задач широко используют методы нелинейной обработки, основанные на порядковых статистиках, квазиоптимальной оценке сигналов и т.д. [Р.Гонсалес, Р.Вудс, Цифровая обработка изображений. М.: Техносфера, 2005, - 1072 с.]. Нелинейная обработка сводится к построению нелинейных пространственных фильтров, основанных на порядковых статистиках. Отклик фильтра определяется предварительным ранжированием значений пикселей, покрываемых маской фильтра, и последующим выбором значения, находящегося на определенной позиции упорядоченной последовательности [Astola J., Kuosmanen P. Fundamentals of nonlinear digital filtering // Boca Raton (USA): CRC Press LLC, 1997. - P.276; Pitas I., Venetsanopoulos A.N. Nonlinear Digital Filters // Boston (USA): Principles and Applications. Kluwer Academic Publisher, 1990. - P.321; Хуанга Т. Обработка изображений и цифровая фильтрация // М.: Мир, 1979 - С.320; Taguchi A., Meguro M. Adaptive L-filters Based on Fuzzy Rules // San Jose (California, USA): Proc. of IS&T/SPIE Symposium on Electronic Imaging. Science and Technology. - 1995, V.2424. - P.76-83]. Одним из примеров действующей импульсной помехи является шум, который описывается Рэлеевским законом распределения или Вейбула.
Известны способы нелинейной фильтрации, к которым можно отнести способы на основе порядковых статистиках (медианная фильтрация, взвешенная медианная фильтрация, способы мериадного оценивания, L оценки, R оценки, М оценки и т.д.) [RU 2045129, RU 2043654, SU 1698896].
В случае использования медианной фильтрации используется маска фильтра, имеющая центральную симметрию, при этом центр располагается в текущей точке фильтрации. Действие медианного фильтра состоит в замене значения в центральной точке маски изображения на медиану значений яркости в окрестности маски фильтра. Для присвоения элементам, охватываемым маской фильтра, различных весов используется взвешенный медианный фильтр [Pitas I., Venetsanopoulos A.N. Nonlinear Digital Filters // Boston (USA): Principles and Applications. Kluwer Academic Publisher, 1990. - P.321]. Значения коэффициентов уменьшаются по мере удаления от центра маски.
К достоинствам медианной фильтрации относится возможность устранения импульсного шума при меньшей степени сглаживания перепада яркости изображения, в сравнении с линейной фильтрацией.
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: обработка двумерного цифрового сигнала, запоминание цифрового сигнала, устранение значений импульсного шума.
Недостатками известного способа и устройства, его реализующего, являются:
- зависимость эффективности подавления шума от размера маски фильтра;
- слабое подавление шума, имеющего гауссовский закон распределения.
- требуется априорная информация о my, σy и законе распределения.
К нелинейным способам обработки так же относят фильтр серединной точки, который объединяет в себе методы порядковых статистик и усреднения [Гонсалес Р., Вудс Р. Цифровая обработка изображений // М.: Техносфера, 2005. - С.1072]. Работа данного фильтра заключается в вычислении среднего между максимальным и минимальным значениями в маске фильтра:

Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: обработка двумерного цифрового сигнала, запоминание цифрового сигнала, устранение значений импульсного шума.
Недостатками известного способа и устройства, его реализующего, являются:
- неспособность обрабатывать граничные строки или столбцы изображения.
Широко используются способы на основе ранговых критериев L-, М- и R-оценки [Хьюбер Дж.П. Робастность в статистике // Пер. с англ. - М.: Мир, 1984. - С.304].
L-оценка. Данный класс нелинейных способов обработки использует порядковую статистику и взвешенную сумму. Оценка, полученная с помощью L-фильтра, описывается следующим выражением [Обработка случайных сигналов и процессов / Беседин А.Н., Зеленский А.А., Кулемин Г.П., Лукин В.В. - Учебное пособие. - Харьков: Нац. Аэрокосм. Ун-т "Харьк. Авиац. Ин-т", 2005. - 469 с.]:

где Y(i+s,j+f) - порядковая статистика для пикселей исходного изображения, принадлежащих скользящему окну с размером m×n, ws,j - весовой коэффициент.
Подбирая значения весовых коэффициентов ws,f - можно изменять в широких приделах свойства L-оценок. За счет варьирования коэффициентов ws,f можно достичь компромисса между устойчивостью к импульсным помехам, сохранением резких перепадов изображения и сглаживания гауссовского шума [Обработка случайных сигналов и процессов / Беседин А.Н., Зеленский А.А., Кулемин Г.П., Лукин В.В. Учебное пособие. - Харьков: Нац. Аэрокосм. Ун-т "Харьк. Авиац. Ин-т", 2005. - 469 с.].
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: обработка двумерного цифрового сигнала, запоминание цифрового сигнала, устранение значений импульсного шума.
Недостатками известного способа и устройства, его реализующего, являются:
- невозможно осуществить оптимальную или квазиоптимальную оценку весовых коэффициентов ws,f в условиях непараметрической априорной неопределенности.
Известен способ цифровой обработки цифровых изображений при решении задач устранения импульсного шума на основе R-оценок [Хуанга Т. Обработка изображений и цифровая фильтрация // М.: Мир, 1979. - С.320]:

где Rs,f - ранг наблюдения в изображении; ws,f - весовые коэффициенты.
Представителем класса R-оценок является оценка, построенная на основе рангового критерия Вилкоксона [Обработка случайных сигналов и процессов / Беседин А.Н., Зеленский А.А., Кулемин Г.П., Лукин В.В. - Учебное пособие. - Харьков: Нац. Аэрокосм. Ун-т "Харьк. Авиац. Ин-т", 2005. - 469 с.; А.Н.Жовинский, В.Н.Жовинский. Инженерный экспресс-анализ случайных процессов. - М.: Энергия, 1979. - 113 с.].
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: обработка двумерного цифрового сигнала, запоминание цифрового сигнала, устранение значений импульсного шума.
Недостатками известного способа и устройства, его реализующего, являются:
- существенным недостатком оценки Вилкоксона является большая алгоритмическая сложность ее получения и даже при сравнительно небольших размерах выборки N возникают проблемы обеспечения необходимого быстродействия вычислений;
- использование R-оценки Вилкоксона мало эффективно при сглаживании шума с гауссовской плотностью распределения.
Известен способ обработки цифровых изображений при решении задач устранения импульсного шума на основе М-оценка. Способ на основе М-оценок представляет собой решение задачи максимального правдоподобия в скользящем окне [Грузман И.С., Киричук B.C., Косых В.П., Перетяган Г.И. Цифровая обработка изображений в информационных системах // Новосибирск: изд-во НГТУ, 2000. - С.168]. Способ обработки на основе М-оценок обобщает способы обработки на основе L-оценки и R-оценки.
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: обработка двумерного цифрового сигнала, запоминание цифрового сигнала, устранение значений импульсного шума.
Недостатками известного способа и устройства, его реализующего, являются:
- в условия ограниченности размера скользящего окна при обработке цифровых изображений решение задачи максимального правдоподобия существенно затруднено, что приводит к переходу к квазиоптимальным оценкам;
- отсутствие априорной информации о плотности распределения сигнала неискаженного изображения и действующего импульсного шума не позволяет получить М-оценку.
Способы обработки изображений на основе мириадных оценок. В качестве решения задачи максимума правдоподобия осуществляется поиск мириады выборки [Kalluri S., Arce G. Adaptive weighted myriad filter algorithms for robust signal processing in α-stable noise environments // Proc. of IEEE Trans, on signal processing, 1998. - V.46. - No 2. - P.322-334.]:

где k>0 - настроечный параметр, называемый параметром линейности мириады, который играет фундаментальную роль в теории мириадного оценивания. При k≤2σш, мириадный фильтр обладает способностью подавлять смешанные помехи и сохранять резкие перепады изображения и по своим свойствам оценка схожа с оценкой медианного фильтра. При k>>σш свойства мириадного фильтра близки к свойствам оценок метода простого скользящего среднего [Абрамов С.К. Алгоритм реализации мириадной фильтрации // Авиационно-космическая техника и технология - Вып.21. - Харьков: Нац. аэрокосмический ун-т "ХАИ", 2000 - С.143-145].
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: робастная обработка двумерного цифрового сигнала, запоминание цифрового сигнала, устранение значений импульсного шума.
Недостатками известного способа и устройства, его реализующего, являются:
- для достижения необходимого компромисса между ослаблением шума и получения гладкой оценки полезной составляющей необходимо априорно оценить или знать статистические характеристики составляющих обрабатываемого сигнала.
- операция поиска минимума целевой функции (5), которая достаточно трудоемка, существенно ограничивает его применение.
Наиболее близким к изобретению является способ обнаружения аномальных измерений без оценки функции тренда и устройство его реализующее [Пат. №2302655, МПК G06F 15/00]. Формируется набор штрафов  для значений исходной дискретной реализации результатов измерений
для значений исходной дискретной реализации результатов измерений  , которые превысили установленные значения порогов yk≥pi,
, которые превысили установленные значения порогов yk≥pi,  , определяются интервалы нестационарности штрафных значений с последующим их обнулением, формируются результирующие штрафные значения путем суммирования значений штрафов отдельно для каждого отсчета исходной дискретной реализации результатов измерений, отсчеты исходной дискретной реализации, у которых результирующие штрафные значения превышают вычисленный пороговый уровень, считаются аномальными
, определяются интервалы нестационарности штрафных значений с последующим их обнулением, формируются результирующие штрафные значения путем суммирования значений штрафов отдельно для каждого отсчета исходной дискретной реализации результатов измерений, отсчеты исходной дискретной реализации, у которых результирующие штрафные значения превышают вычисленный пороговый уровень, считаются аномальными  .
.
Признаки способа-прототипа, совпадающие с признаками заявляемого технического решения, следующие: формирование порогов, хранение результатов, дискриминатор, обнуление интервалов нестационарности штрафных значений, обнуление, сумматор.
Недостатками известного способа и устройства, его реализующего, являются:
- не предлагается методики определения пороговых значений на каждом этапе штрафования значений;
- не позволяет обрабатывать двумерные сигналы и изображения.
Структурная схема устройства, реализующего рассмотренный алгоритм, содержит блок хранения результатов измерений, блок установки количества порогов, блок формирования порогов, блоки дискриминаторов, блоки хранения штрафных значений, блок установки интервала обнаружения, блоки обнаружения интервалов нестационарности штрафных значений, блоки обнуления, блок суммирования, блок порога, блок дискриминатора, блок хранения, генератор тактовых импульсов.
Предлагаемый способ обнаружения и устранения импульсного шума при обработке изображений предполагает, что исходное обрабатываемое цифровое изображение описывается нестационарным случайным процессом, который представляет собой аддитивную смесь шума и неискаженного изображения, умноженную на двоичную переключающую функцию, описывающую наличие аномальных значений (значения импульсного шума):

где λi,j - значения неискаженного цифрового изображения размера N×M;
εн(i,j) - значения аддитивного шума; ai,j - реализация двоичной переключательной случайной функции, принимающей с вероятностью Ран значение ai,j=1 и с вероятностью (1-Ран) значение ai,j=0; Ран - вероятность появления аномальных значений, Ран<<1. Математическая модель исходного сигнала изображения (6) является частным случаем модели (1).
Относительно модели неискаженного цифрового сигнала λi,j предполагается, что на некоторых замкнутых областях оно может быть достаточно точно описано поверхностями первого порядка. Относительно значений аддитивного шума εн(i,j) предполагается, что его реализация содержит независимые отсчеты, а плотность распределения является симметричной относительно математического ожидания в любом ее сечении.
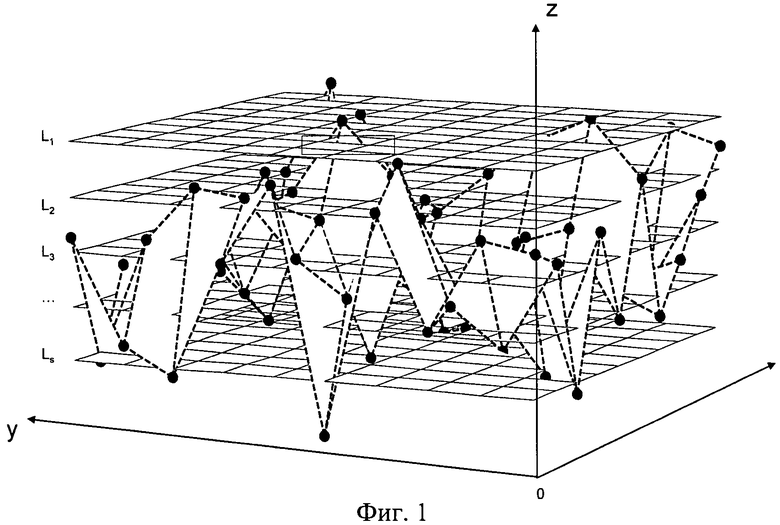
Анализируемый сигнал представляет собой 8-битное цифровое изображение градации серого (6). Определим максимальный размах сигнала и разобьем его на заданное количество уровней P. Так как производится равномерное разбиение сигнала P уровнями (пороги):

где Δz=(max(z)-min(z))/P - шаг разбиения сигнала.
На фиг.1 представлен пример разбиения реализации двумерного сигнала на пороговые уровни Ls. Выдвигается гипотеза о том, что если при некотором фиксированном значении Ls найдется некоторая замкнутая область D фиксированного размера, в которой для каждого ее элемента выполнится условие zi,j≥Ls, то эта область является областью нестационарности реализации двумерного сигнала и должна быть локализована.
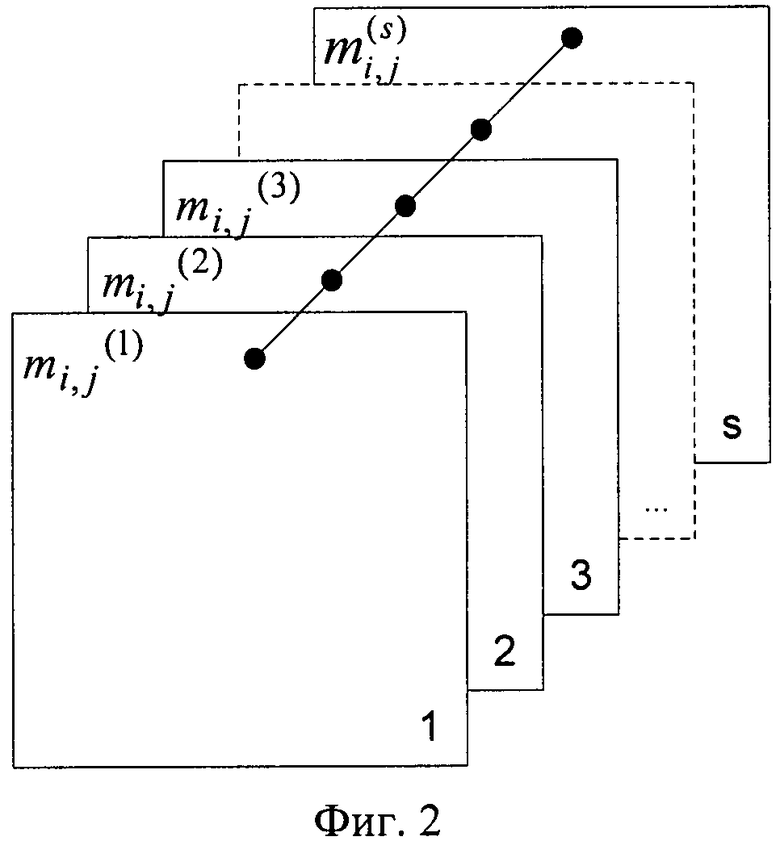
На основе пороговых значений Ls формируются s массивов  размерности N×M.
размерности N×M.
Массивы  представляет собой совокупность значений (0 или 1), которые назначаются в соответствии со следующим условием:
представляет собой совокупность значений (0 или 1), которые назначаются в соответствии со следующим условием:

где D является замкнутой ненулевой областью квадратной или прямоугольной формы в массиве 
 Размер области D определяет область нестационарности обрабатываемого сигнала и ограничивает накопление значений штрафов в последующих массивах
Размер области D определяет область нестационарности обрабатываемого сигнала и ограничивает накопление значений штрафов в последующих массивах  (фиг.2).
(фиг.2).
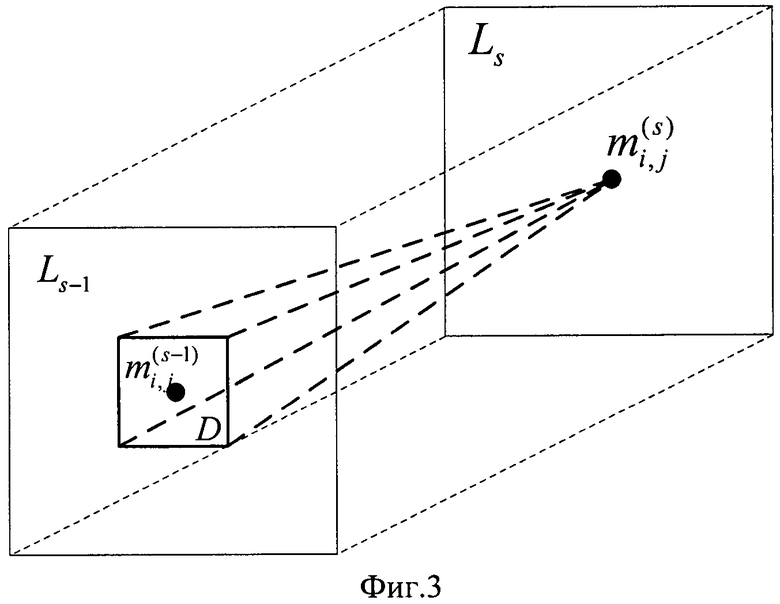
На фиг.3 представлено графическое пояснение условия формирования массивов  на основе выражения (8). При каждом фиксированном значении Ls формируется массив
на основе выражения (8). При каждом фиксированном значении Ls формируется массив  , при этом
, при этом  .
.
Область D определяется размером и является базой двумерного цифрового программного обнаружителя. В простейшем случае форма области D является квадратной или прямоугольной. При формировании массива  проверяются два условия zi,j≥Ls,
проверяются два условия zi,j≥Ls,  для
для 
 Первое условие проверяет наличие превышения значения элемента массива исходного двумерного сигнала zi,j заданного порога Ls. Второе условие проверяет принадлежность анализируемого элемента массива к области нестационарности D, сформированной на предыдущем шаге s-1. Значение массива
Первое условие проверяет наличие превышения значения элемента массива исходного двумерного сигнала zi,j заданного порога Ls. Второе условие проверяет принадлежность анализируемого элемента массива к области нестационарности D, сформированной на предыдущем шаге s-1. Значение массива  только при выполнении обоих условий: zi,j≥Ls,
только при выполнении обоих условий: zi,j≥Ls,  В результате выполнения условия (8) и формирования массивов
В результате выполнения условия (8) и формирования массивов  при
при  происходит локализация областей нестационарности исходного двумерного сигнала размером с область D и более.
происходит локализация областей нестационарности исходного двумерного сигнала размером с область D и более.
Результирующий массив  формируется путем усреднения поэлементно в соответствии со следующим выражением:
формируется путем усреднения поэлементно в соответствии со следующим выражением:

Положение аномальных значений в исходной реализации двумерного сигнала определяется из анализа массива  путем проверки условия:
путем проверки условия:
Таким образом, массив  , представляет собой маску расположения аномальных значений в исходной реализации двумерного сигнала.
, представляет собой маску расположения аномальных значений в исходной реализации двумерного сигнала.
В исходной постановке задачи отмечалось, что исходный сигнал является локально гладким (теорема Вейерштрассе). С целью устранения значений импульсного шума определим локальные области относительно них и проведем аппроксимацию значений поверхность заданного порядка. Для решения данной задачи необходимо определить размер локализуемой поверхности, ее порядок. Решение задачи аппроксимации заключается в минимизации целевой функции вида:

где  - аппроксимируемая поверхность, k- количество точек в локализуемой области.
- аппроксимируемая поверхность, k- количество точек в локализуемой области.
С целью уменьшения вычислительных затрат для последующей аппаратной реализации предлагаемого алгоритма ограничимся рассмотрением поверхностей первого порядка:  . Формирование локальных областей, для последующей аппроксимации осуществляется таким образом, чтобы обнаруженные аномальные значения располагались в их центре. Не исключены случаи, когда в локальной области могут располагаться два и более значений импульсного шума. В связи с этим используем обобщенную аппроксимацию поверхностью на неравномерной сетке с исключением из аппроксимации точек, содержащих импульсный шум. В этом случае условие (11) перепишется в следующем виде:
. Формирование локальных областей, для последующей аппроксимации осуществляется таким образом, чтобы обнаруженные аномальные значения располагались в их центре. Не исключены случаи, когда в локальной области могут располагаться два и более значений импульсного шума. В связи с этим используем обобщенную аппроксимацию поверхностью на неравномерной сетке с исключением из аппроксимации точек, содержащих импульсный шум. В этом случае условие (11) перепишется в следующем виде:

где xi, yj - координаты элементов z.
Решением целевой функции (11) является оценка коэффициентов 

 поверхности . Для получения оценок необходимо решить систему уравнений вида:
поверхности . Для получения оценок необходимо решить систему уравнений вида:
Полученные оценки коэффициентов подставляем в уравнение плоскости и вычисляем значение двумерного сигнала z в точках, где обнаружены аномальные значения, т.е. заменяются значения zi, j, для таких i,j, при которых выполняется условие  .
.

Процедура устранения значений импульсного шума в обрабатываемом изображении повторяется для всех локализованных областей относительно обнаруженных значений импусльного шума.
Устройство обнаружения и устранения импульсного шума при обработке изображений (фиг.4) содержит блок буфера 1, вход которого является информационным входом устройства, а первый выход которого подключен к первому входу блока формирования пороговых значений 3, первому входу блока аппроксимации 13 и к первым входам блоков сравнения 4.P, выходы которых подключены к входам блоков буфера 5.P, выходы которых подключены к первым входам блоков обнаружения областей нестационарности 6.P, выходы которых подключены к входам блоков обнуления 7.P, выходы которых подключены к входам блока сумматора 8, выход которого подключен к входу блока определения среднего значения штрафов 9, выход которого подключен к первому входу блока сравнения 10, выход блока сумматора 8 подключен ко второму входу блока сравнения 10, выход которого подключен к входу блока буфера 11, выход которого подключен к первому входу блока локализации значений импульсного шума 12, выход которого подключен ко второму входу блока аппроксимации 13, выход которого подключен к входу блока устранения значений импульсного шума 14, выход которого подключен к входу блока буфера 15, чей выход является информационным выходом устройства; первый выход блока управления 2 подключен ко второму входу блока формирования пороговых значений 3, выходы которого подключены ко вторым входам блоков сравнения 4.P; второй выход блока управления 2 подключен ко вторым входам блоков обнаружения областей нестационарности 6.P, третий выход блока управления 2 подключен ко второму входу блока локализации значений импульсного шума 12, четвертый выход блока управления 2 подключен к третьему входу блока аппроксимации 13; синхронность работы устройства обеспечивает генератор тактовых импульсов 16.
Устройство обнаружения и устранения импульсного шума при обработке изображений работает следующим образом. Исходное цифровое изображение поступает в блок буфера, где осуществляется его хранение и передается в блок формирования пороговых значений, где осуществляется определение диапазона изменения значений цифрового изображения и разбиение его на P+1 диапазон путем формирования P порогов, формируется значения порогов mk, где k=1…P. Каждое значение порогов mk и исходное цифровое изображение параллельно поступают в P каналов обработки. В каждом канале сравнивается значение порога mk со значением исходного цифрового изображения в блоках сравнения. При превышении значений исходного цифрового изображения значения порога mk соответствующий пиксель получает штрафное значение, равное 1, и записывается в блоке буфера. Полученные штрафные значения поступают на входы блоков обнаружения областей нестационарности, где проверяются на наличие замкнутой, заполненной штрафными значениями области D - область цифрового программного обнаружителя, задаваемая в блоке управления. Обнаруженные области считаются областями нестационарности и должны быть обнулены. Промаркированные массивы штрафов поступают в блок обнуления. В блоке обнуления осуществляется обнуление штрафных значений для областей, определенных блоком обнаружения как нестационарные. С выходов блоков обнуления областей штрафные значения из P каналов массивом штрафов поступают в блок сумматора, где определяется результирующий массив штрафов путем их сумматора из P каналов отдельно для каждого элемента массива.
Значения результирующего массива штрафных значений с блока сумматора поступают в блок определения среднего значения штрафов и блок сравнения. В результате, на первый вход блока сравнения поступает значение среднего штрафа результирующего массива с блока определения среднего значения штрафов, а на второй его вход поступает результирующий массив штрафов. В блоке сравнения сравниваются результирующие значения штрафов со средним значением штрафов. Таким образом, значениями импульсного шума считаются те пиксели, у которых объем полученных штрафных значений будет превышать среднее значение штрафов. Результат обработки результирующего массива штрафов записывается в блок буфера. Таким образом, блок буфера содержит массив штрафов, в котором координаты ненулевых элементов соответствуют координатам импульсного шума в исходном цифровом изображении.
С целью устранения значений импульсного шума в блоке локализации значений импульсного шума локализуем области относительно обнаруженных пикселей путем формирования прямоугольных или квадратных областей, координаты центров которых соответствуют координатам обнаруженных значений. Размер и форма областей локализации задается блоком управления. Координаты локальных областей передаются в блок аппроксимации, где на каждой из областей осуществляется аппроксимация значений исходного изображения поверхностью заданного порядка, степень аппроксимации поверхности задается блоком управления. Аппроксимация на каждом локализованном участке изображения осуществляется с учетом обнаруженных значений импульсного шума (исключаются значения импульсного шума при аппроксимации поверхностью заданного порядка). В блоке устранения заменяются значения импульсного шума на полученные значения аппроксимирующей поверхности. Обработанное изображение поступает в блок буфера, выход которого является информационным выходом устройства. Синхронность работы устройства обеспечивает генератор тактовых импульсов.
Такой способ обнаружения и устранения значений импульсного шума реализуется следующим образом. В блок буфера 1 записывается исходное цифровое изображение. Блок управления 2 определяет количество порогов, размер области цифрового программного обнаружителя, размер локальных областей, степень аппроксимирующей плоскости. Блок формирования пороговых значений 3 определяет значения порогов, количество которых задается блоком управления 2. В блоках сравнения 4.P сравниваются значения порога mk со значениями исходного цифрового изображения. Если значение изображения превышает значение установленного порога mk, то данный пиксель получает штрафное значение, равное 1, которое записывается в блоки буфера 5.P. Штрафные значения с выходов блоков буферов 5.P поступают на входы блоков обнаружения областей нестационарности 6.P, где проверяется наличие в обработанном массиве замкнутой области D ненулевых значений элементов массива, что соответствует областям нестационарности в исходном цифровом изображении, где D - область цифрового программного обнаружителя, задаваемая в блоке управления 2.
В блоке обнуления 7.P осуществляется обнуление накопленных штрафных значений для областей, определенных блоком обнаружения областей нестационарности 6.P. С выходов блоков обнуления 7.P штрафные значения поступают в блок сумматора 8, где определяется результирующий массив штрафов. Значения результирующего массива штрафов с блока сумматора 8 поступают в блок определения среднего значения штрафов 9. В результате, на первый вход блока сравнения 10 поступает среднее значение штрафов с блока определения среднего значения штрафов 9, а на второй вход - результирующий массив штрафных значение с блока сумматора 8. В блоке сравнения 10 сравниваются результирующие значения штрафов со средним значением.
Таким образом, в исходном цифровом изображении считаются импульсными значениями шума те пиксели, у которых объем полученных штрафных значений будет превышать среднее значение штрафов. Данные о расположении в исходном цифровом изображении значения импульсного шума записываются в блок буфера 11. Координаты значений импульсного шума поступают в блок локализации значений импульсного шума 12, размер локализуемой области задается блоком управления 2. Координаты локализованных областей передаются в блок аппроксимации 13, где на каждой из областей осуществляется аппроксимация значений исходного изображения поверхностью, степень аппроксимирующей поверхности определяется блоком управления 2. Аппроксимация на каждом локализованном участке изображения осуществляется с учетом обнаруженных значений импульсного шума (исключаются значения импульсного шума при аппроксимации поверхностью заданного порядка). В блоке устранения 14 заменяются значения импульсного шума на полученные значения аппроксимирующей поверхности. Обработанное изображение поступает в блок буфера 15, выход которого является информационным выходом устройства. Синхронность работы устройства обеспечивает генератор тактовых импульсов 16.
Технический результат - обнаружение и устранение значений импульсного шума на цифровых изображениях.
Посредством имитационного моделирования было установлено, что предлагаемый способ обладает следующими преимуществами:
- позволяет обнаруживать и устранять значения импульсного шума при ограниченном объеме априорной информации о статистических характеристиках неискаженного изображения, действующих аддитивных помехах и импульсных шумов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛЬНЫХ ИЗМЕРЕНИЙ БЕЗ ОЦЕНКИ ФУНКЦИИ ТРЕНДА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2005 |
|
RU2302655C1 |
| Способ адаптивной медианной фильтрации импульсного шума на изображениях | 2021 |
|
RU2771791C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ АНОМАЛЬНЫХ ИЗМЕРЕНИЙ | 2005 |
|
RU2301445C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ АНОМАЛЬНЫХ ИЗМЕРЕНИЙ ПРИ ФИКСИРОВАННОМ ЗНАЧЕНИИ ВЕРОЯТНОСТИ ЛОЖНОЙ ТРЕВОГИ | 2007 |
|
RU2361268C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ АНОМАЛЬНЫХ ИЗМЕРЕНИЙ | 2016 |
|
RU2616568C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ДВУМЕРНОГО СПОСОБА РАЗМНОЖЕНИЯ ОЦЕНОК | 2009 |
|
RU2406130C1 |
| УСТРОЙСТВО ФИЛЬТРАЦИИ ДИНАМИЧЕСКИХ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ В УСЛОВИЯХ ОГРАНИЧЕННОГО ОБЪЕМА АПРИОРНЫХ ДАННЫХ | 2013 |
|
RU2522043C1 |
| АДАПТИВНЫЙ ДВУМЕРНЫЙ СПОСОБ РАЗМНОЖЕНИЯ ОЦЕНОК И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2010 |
|
RU2461874C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЧЕРНО-БЕЛЫХ ИЗОБРАЖЕНИЙ | 2007 |
|
RU2340938C1 |
| УСТРОЙСТВО ПРЕДОБРАБОТКИ КАРТЫ ГЛУБИНЫ СТЕРЕОИЗОБРАЖЕНИЯ | 2013 |
|
RU2535183C1 |
Изобретение относится к предварительной обработке цифровых изображений. Техническим результатом является обнаружение и устранение значений импульсного шума при обработке цифровых изображений в условиях непараметрической априорной неопределенности о статистических характеристиках импульсного шума и изображения. Способ обнаружения и устранения импульсного шума при обработке изображений заключается в том, что значения исходного цифрового изображения сравниваются с различными значениями порогов. Затем формируется набор штрафов для значений исходного цифрового изображения, которые превысили установленные значения порогов, формируются результирующие штрафные значения путем суммирования значений штрафов отдельно для каждого отсчета. При этом отсчеты, у которых результирующие штрафные значения превышают вычисленный пороговый уровень, считаются аномальными. Далее формируются двумерные массивы штрафов для каждого порогового уровня. После чего определяются двумерные области нестационарности и локализуются двумерным программным обнаружителем с последующим обнулением штрафных значений. Обнаруженные значения импульсного шума устраняются путем замены их на значения аппроксимирующей поверхности первого порядка на локализованных областях. 2 н.п. ф-лы, 4 ил.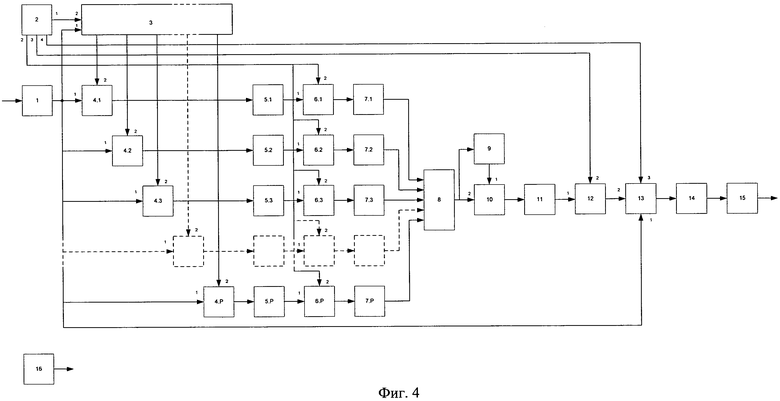
1. Способ обнаружения и устранения импульсного шума при обработке изображений заключается в том, что значения исходного цифрового изображения сравниваются с различными значениями порогов, формируется набор штрафов для значений исходного цифрового изображения, которые превысили установленные значения порогов, формируются результирующие штрафные значения путем суммирования значений штрафов отдельно для каждого отсчета, отсчеты, у которых результирующие штрафные значения превышают вычисленный пороговый уровень, считаются аномальными, отличающийся тем, что формируются двумерные массивы штрафов для каждого порогового уровня, определяются двумерные области нестационарности и локализуются двумерным программным обнаружителем с последующим обнулением штрафных значений, обнаруженные значения импульсного шума устраняются путем замены их на значения аппроксимирующей поверхности первого порядка на локализованных областях.
2. Устройство обнаружения и устранения импульсного шума при обработке изображений содержит блок буфера 1, вход которого является информационным входом устройства, а первый выход которого подключен к первым входам блоков сравнения 4.P, выходы которых подключены к входам блоков буфера 5.P, выходы которых подключены к первым входам блоков обнаружения областей нестационарности 6.P, выходы которых подключены к входам блоков обнуления 7.P, выходы которых подключены к входам блока сумматора 8, выход которого подключен к входу блока определения среднего значения штрафов 9, выход которого подключен к первому входу блока сравнения 10, выход блока сумматора 8 подключен ко второму входу блока сравнения, выход которого подключен к входу блока буфера 11; выход блока буфера 1 подключен к первому входу блока формирования пороговых значений 3, выходы которого подключены ко вторым входам блоков сравнения 4.P, отличающееся тем, что выход блока буфера 11 подключен к первому входу блока локализации значений импульсного шума 12, выход которого подключен ко второму входу блока аппроксимации 13, выход которого подключен к входу блока устранения значений импульсного шума 14, выход которого подключен к входу блока буфера 15, чей выход является информационным выходом устройства; первый выход блока управления 2 подключен ко второму входу блока формирования пороговых значений 3, второй выход блока управления 2 подключен ко вторым входам блоков обнаружения областей нестационарности 6.P, третий выход блока управления 2 подключен ко второму входу блока локализации значений импульсного шума 12, четвертый выход блока управления 2 подключен к третьему входу блока аппроксимации 13; синхронность работы устройства обеспечивает генератор тактовых импульсов 16.
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛЬНЫХ ИЗМЕРЕНИЙ БЕЗ ОЦЕНКИ ФУНКЦИИ ТРЕНДА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2005 |
|
RU2302655C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА (ВАРИАНТЫ) И СПОСОБ УМЕНЬШЕНИЯ ИМПУЛЬСНОГО ШУМА В НЕЙ | 1993 |
|
RU2107404C1 |
| УСТРОЙСТВО ДЛЯ СГЛАЖИВАНИЯ ИМПУЛЬСНОЙ ПОМЕХИ | 1991 |
|
RU2024056C1 |
| Способ определения железопро-ТЕидОВ | 1979 |
|
SU794512A1 |
| US 5659370 А, 19.08.1997. | |||

