ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к инструменту шины и способу для двухпроводной инструментальной шины, более конкретно к инструменту шины и способу для прогнозируемого ограничения энергопотребления в двухпроводной инструментальной шине.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Шинные контуры часто используют для подключения различных инструментов, например, в промышленном применении. Шинный контур может обеспечивать электрическую мощность для инструментов шины. Шинный контур может сделать возможной связь между инструментом шины и внешним устройством(ами). Например, шинный контур часто используют для передачи сообщений об измерениях инструмента шины, и дополнительно шинный контур может сделать возможным управление инструментом шины.
Одним из протоколов шинного контура является протокол двухпроводной шины, именуемый иногда шиной 4-20 миллиампер (мА) из-за присущих ему ограничений по мощности. Данный протокол шины может быть использован для упрощения подключения инструментов к шине с использованием только двух проводов, причем два провода обеспечивают как электроэнергию, так и электронную связь. Данный протокол шины может быть использован в опасных или взрывоопасных средах, например, когда электрическую мощность ограничивают из соображений безопасности.
Передача значений измерений в обычных протоколах двухпроводной шины содержит управление током и его изменение в заданном интервале, например между 4 и 20 мА. В данном протоколе шины условие нулевого потока обозначается путем управления током контура в шинном контуре, чтобы он составил 4 мА. Ток шинного контура, который меньше чем 4 мА, не является действительным измерением в соответствии с протоколом двухпроводной шины и может содержать фазу включения электропитания инструмента шины или некоторый другой вид сигнализации. Подобным образом, максимальная величина потока может привести к управлению током шинного контура в инструменте шины, приблизительно к 20 мА.
Главная система соединена с двухпроводным шинным контуром и обеспечивает регулируемую электрическую мощность и принимает сигналы сообщений от всех подключенных инструментов шины. Главная система транслирует величину тока (т.е. значение измерения) и передает результат измерения на внешнее устройство, например управляющий компьютер.
Ограниченный электрический ток и ограниченная электрическая мощность могут быть проблемой. Инструмент шины должен работать точно и надежно без превышения ограничений по току. Увеличенное энергопотребление в инструменте шины может вызвать необходимость превышения инструментом электрического тока, величины, заданной соответствующим протоколом. Дополнительно, в условиях минимального потока, инструмент двухпроводной шины не может потреблять более 4 мА электрического тока. Этот низкий уровень тока может быть проблемой и может быть недостаточным током для работы инструмента шины.
В некоторых вариантах воплощения, если энергопотребление достигает или превышает доступный предел мощности, может возникнуть сбойная ситуация. Сбойная ситуация в некоторых вариантах воплощения может привести к ошибочной или ненадежной работе инструмента шины. Сбойная ситуация в некоторых вариантах воплощения может привести к перезагрузке процессора или процессоров в инструменте шины.
Следовательно, желательно, чтобы энергопотребление инструментом шины поддерживалось ниже допустимого предела мощности, если это вообще возможно.
КРАТКОЕ ОПИСАНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
В одном аспекте изобретения инструмент шины, сконфигурированный для прогнозируемого ограничения энергопотребления и выполненный с возможностью использования с двухпроводной инструментальной шиной, содержит
датчик;
параллельный стабилизатор, сконфигурированный для шунтирования избыточного электрического тока; и
контроллер, соединенный с параллельным стабилизатором и датчиком, причем контроллер сконфигурирован для генерации прогнозируемой доступной мощности Ppredicted, которая будет доступна инструменту шины после изменения в токе IL контура, сравнения прогнозируемой доступной мощности Ppredicted с мощностью Pt0 в текущий момент времени, содержащей мощность Pcontroller контроллера плюс мощность Psensor датчика, и уменьшения мощности Psensor датчика, если прогнозируемая доступная мощность Ppredicted меньше, чем мощность Pcontroller контроллера плюс мощность Psensor датчика.
Предпочтительно, контроллер дополнительно сконфигурирован для приема значения измерения с датчика и генерации прогнозируемого тока IL_next контура из значения измерения, причем прогнозируемая доступная мощность Ppredicted генерируется с использованием прогнозируемого тока IL_next контура.
Предпочтительно, уменьшение мощности Psensor датчика включает в себя уменьшение тока Isensor датчика, обеспеченного для датчика.
Предпочтительно, контроллер дополнительно сконфигурирован для определения сопротивления RL контура и напряжения VS питания.
Предпочтительно, определение сопротивления RL контура и напряжения VS питания содержит предварительные этапы, на которых измеряют первое напряжение VL1 контура при заданном первом токе IL1 контура, измеряют второе напряжение VL2 контура при заданном втором токе IL2 контура и определяют сопротивление RL контура из первого и второго напряжений VL1 и VL2 контура и первого и второго токов IL1 и IL2 контура.
В одном аспекте изобретения способ для прогнозируемого ограничения энергопотребления в инструменте шины двухпроводной инструментальной шины содержит этапы, на которых
генерируют прогнозируемую доступную мощность Ppredicted, которая будет доступна инструменту шины после изменения в токе IL контура;
сравнивают прогнозируемую доступную мощность Ppredicted с мощностью Pt0 в текущий момент времени, содержащей мощность Pcontroller контроллера плюс мощность Psensor датчика; и
уменьшают мощность Psensor датчика, если прогнозируемая доступная мощность Ppredicted меньше, чем мощность Pcontroller контроллера плюс мощность Psensor датчика.
Предпочтительно, способ дополнительно содержит этапы, на которых принимают значение изменения с датчика и генерируют прогнозируемый ток IL_next контура из значения измерения, причем прогнозируемую доступную мощность Ppredicted генерируют с использованием прогнозируемого тока IL_next контура.
Предпочтительно, уменьшение мощности Psensor датчика включает в себя этап, на котором уменьшают ток Isensor через датчик, обеспеченный для датчика.
Предпочтительно, способ дополнительно содержит предварительный этап, на котором определяют сопротивление RL контура и напряжение VS питания.
Предпочтительно, определение сопротивления RL контура содержит предварительные этапы, на которых измеряют первое напряжение VL1 контура для заданного первого тока IL1 контура, измеряют второе напряжение VL2 контура для заданного второго тока IL2 контура и определяют сопротивление RL контура из первого и второго напряжений VL1 и VL2 контура и первого и второго токов IL1 и IL2 контура.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых
Фиг. 1 изображает систему шинного контура согласно варианту воплощения изобретения;
Фиг. 2 изображает контроллер согласно варианту воплощения изобретения;
Фиг. 3 изображает блок-схему последовательности этапов способа для прогнозируемого ограничения энергопотребления в инструменте шины двухпроводной инструментальной шины согласно варианту воплощения изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ
ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Фиг. 1-3 и последующее описание раскрывают конкретные примеры, предназначенные для представления специалистам в данной области техники получения и использования лучшего варианта воплощения изобретения. Для раскрытия принципов изобретения некоторые традиционные аспекты были упрощены или опущены. Специалисты в данной области техники примут во внимание вариации этих примеров, попадающие в объем изобретения. Специалистам в данной области техники следует учесть, что описанные ниже признаки могут быть объединены различными способами для создания нескольких вариантов изобретения. В результате, изобретение не ограничено конкретными примерами, описанными ниже, но только формулой изобретения и ее эквивалентами.
Фиг. 1 изображает систему 100 шинного контура согласно варианту воплощения изобретения. Система 100 шинного контура включает в себя главную систему 1, двухпроводной шинный контур 4 и инструмент 10 шины, подключенный к двухпроводному шинному контуру 4. Главная система 1 может включать в себя источник 2 электропитания, сигнальный резистор RS и измерительное устройство 3, соединенное с сигнальным резистором RS. В некоторых вариантах воплощения система 100 шинного контура может включать в себя барьер (показан пунктирной линией) искробезопасности (I.S.). Барьер I.S. может содержать физический барьер, который сконструирован, например, для защиты в опасной среде.
Главная система 1 генерирует напряжение VL контура и ток IL контура через двухпроводной шинный контур 4. Напряжение VL контура может быть, по существу, определено или ограничено, например, с помощью протокола искробезопасности (I.S.) или другого протокола обеспечения защиты от опасной среды или обеспечения взрывобезопасности. В некоторых системах 100 двухпроводного шинного контура значение напряжения VL контура устанавливают между 16 и 36 вольт (В). Напряжение VL контура зависит от напряжения VS источника питания и тока IL контура. Ток IL контура устанавливается контроллером 20, но ограничивается соответствующим протоколом шины или I.S. Следовательно, контроллер 20 может ограниченным способом изменять ток IL контура. Ток IL контура может быть ограничен в таких протоколах значением, не превышающим 24 мА, и обычно находится в пределах от 4 мА до 20 мА (или от 10 мА до 20 мА) для передачи результата измерения главной системе 1. Тем не менее, другие значения тока контура предусматриваются и попадают в объем описания и формулы изобретения. Дополнительно, напряжение VL контура, обеспеченное источником 2 питания, может быть непостоянным и может требовать измерения для определения мощности. Напряжение VL контура может отклоняться от напряжения VS источника питания.
Ток IL контура протекает через сигнальный резистор RS и создает изменяющееся напряжение. Измерительное устройство 3 измеряет напряжение, созданное на сигнальном резисторе RS, и преобразует напряжение в сигнал измерения. Следовательно, ток IL контура передает измерение с датчика 13 и контроллера 20 на главную систему 1 и в конечном счете на внешнее устройство(а).
Дополнительно, если требуется, на ток IL контура может быть наложена цифровая коммуникационная передача сигналов.
Инструмент 10 шины может содержать любой вид инструментов. Для иллюстрации, инструмент 10 шины может содержать расходомер. Когда инструмент 10 шины является расходомером, включая расходомер Кориолиса или вибрационный денсиметр, датчик 13 включает в себя вибрационный драйвер.
Инструмент 10 шины включает в себя датчик 13, контроллер 20 и параллельный стабилизатор 14. Дополнительно, инструмент 10 шины может включать в себя контроллер 23 тока контура и преобразователи 24 и 25 напряжения для датчика 13 и контроллера 20. Датчик 13 в некоторых вариантах воплощения может содержать отдельную компоненту (не показана), соединенную с инструментом 10 шины. Датчик 13 может содержать любой вид датчиков, например расходомер. Тем не менее, другие датчики предусматриваются и попадают в объем описания и формулы изобретения.
Контроллер 20 соединен с датчиком 13 и управляет датчиком и током IL контура. Контроллер 20 может управлять датчиком 13 и может обрабатывать сигналы, принятые с датчика 13, для передачи значения измерения в виде аналогового выходного тока, имеющего вид изменяющегося тока IL контура, протекающего в двухпроводном шинном контуре 4.
Как показано на фиг.1, ток IL контура, поданный на инструмент 10 шины, содержит ток Icontroller через контроллер, протекающий через контроллер 20, ток Isensor через датчик, протекающий через датчик 13, и ток Ishunt через шунт, протекающий через параллельный стабилизатор 14. Следует понимать, что ток IL контура не является фиксированным.
Благодаря протоколу передачи измерения и ограничениям по мощности, встроенным в систему 100 шинного контура, инструмент 10 шины может допускать потребление всей электрической мощности, поданной главной системой 1 (или может допускать потребность в большем количестве мощности, чем доступно). Следовательно, инструмент 10 шины может быть единственным инструментом, подключенным к двухпроводному шинному контуру 4.
Так как ток IL контура ограничен, инструмент 10 шины может потреблять только доступный электрический ток. Следовательно, если значение измерения, создаваемое инструментом 10 шины, соответствует току IL контура, равному 10 мА, и инструмент 10 шины требует только 8 мА для создания измерения, инструмент 10 шины должен принять или потребить лишние 2 мА, чтобы забрать 10 мА из главной системы 1. Параллельный стабилизатор 14 сконфигурирован для приема лишних 2 мА электрического тока.
Источник 2 питания обеспечивает полную доступную мощность Pavailable, которая содержит напряжение VL контура, умноженное на ток IL контура. Полная доступная мощность Pavailable дополнительно содержит мощность, потребляемую компонентами инструмента 10 шины, т.е., Pavailable=Pshunt+Psensor+Pcontroller. Мощность Pcontroller контроллера является относительно фиксированной. Следовательно, может потребоваться изменение мощности Psensor датчика, чтобы избежать превышения полной доступной мощности Pavailable.
Инструмент 10 шины сконфигурирован для прогнозируемого ограничения энергопотребления при использовании с двухпроводной инструментальной шиной. Инструмент 10 шины сконфигурирован для генерации прогнозируемой доступной мощности Ppredicted, которая будет доступна инструменту 10 шины после изменения тока IL контура, сравнения прогнозируемой доступной мощности Ppredicted с мощностью Pt0 в текущий момент времени, содержащей мощность Pcontroller контроллера плюс мощность Psensor датчика, и уменьшения мощности Psensor датчика в датчике 13, если прогнозируемая доступная мощность Ppredicted меньше, чем мощность Pcontroller контроллера плюс мощность Psensor датчика. Таким образом, мощность не может превышать предельного значения до того, как мощность может быть уменьшена.
Предпочтительно, инструмент шины и способ согласно изобретению могут прогнозируемым образом управлять потреблением мощности, чтобы не выходить за пределы соответствующего протокола шины или I.S. Дополнительно, инструмент шины и способ могут выполнять предварительную регулировку мощности, предотвращая снижения напряжения вследствие дефицита мощности, перезагрузки, ошибочные значения изменения или другие проблемы, которые могут возникнуть, когда инструмент шины истощает запас допустимой мощности. Кроме того, инструмент шины и способ могут, по существу, сохранять промежуток или буфер до предельной мощности, при этом неожиданные выбросы расхода мощности маловероятно превысят предельную мощность.
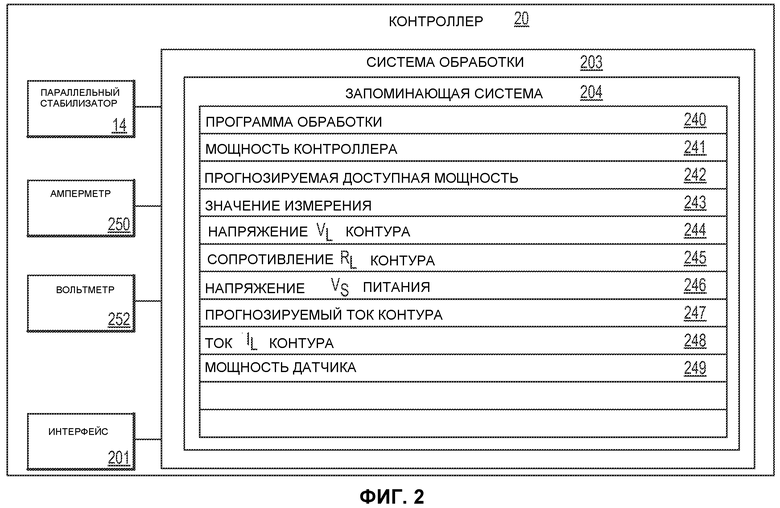
Фиг. 2 изображает контроллер 20 согласно варианту воплощения изобретения. Контроллер 20 может включать в себя интерфейс 201, систему 203 обработки, амперметр 250 и вольтметр 252. Система 203 обработки соединена с параллельным стабилизатором 14, интерфейсом 201, амперметром 250 и вольтметром 252. В некоторых вариантах воплощения контроллер 20 соединен с датчиком 13 через интерфейс 201.
Контроллер 20 принимает сигналы датчика с датчика 13 через интерфейс 201. Контроллер 20 обрабатывает сигналы датчика для получения данных. Интерфейс 201 может выполнять любые необходимые или желательные преобразования сигналов, например любой вид форматирования, усиления, буферизации и т.д. Альтернативно, некоторые или все преобразования сигналов могут быть выполнены в системе 203 обработки. Дополнительно, интерфейс 201 может сделать возможной связь между контроллером 20 и внешними устройствами.
Параллельный стабилизатор 14 сконфигурирован для шунтирования избыточного электрического тока. Весь электрический ток, не потребляемый контроллером 20 или датчиком 13, потребляется параллельным стабилизатором 14.
Амперметр 250 сконфигурирован для измерения электрического тока и обеспечения измерения для системы 203 обработки. В некоторых вариантах воплощения амперметр 250 может измерять ток Ishunt шунта. В некоторых вариантах воплощения амперметр 250 может измерять ток Isensor датчика.
Вольтметр 252 сконфигурирован для измерения напряжения VL шинного контура и обеспечения измерения для системы 203 обработки. Напряжение VL контура может содержать напряжение, доступное на инструменте 10 шины.
Система 203 обработки проводит операции контроллера 20 и обрабатывает измерения, принятые с датчика 13. Система 203 обработки может содержать компьютер общего назначения, микропроцессорную систему, логическую схему или некоторое другое универсальное или специальное устройство обработки. Система 203 обработки может быть распределена между несколькими устройствами обработки. Система 203 обработки может включать в себя любой вид интегральной или независимой электронной запоминающей среды, например запоминающую систему 204.
Запоминающая система 204 может хранить параметры и данные, системные программы, постоянные значения и переменные значения. Например, запоминающая система 204 может хранить программу 240 обработки, мощность 241 контроллера, прогнозируемую доступную мощность Ppredicted 242, значение 243 измерения, напряжение VL 244 контура, сопротивление RL 245 контура, напряжение VS 246 питания, прогнозируемый ток IL_next 247 контура, ток IL 248 контура и мощность Psensor 249 датчика.
Мощность 241 контроллера является электрической мощностью, потребляемой контроллером 20. Мощность 241 контроллера может быть определена как прогнозируемая доступная мощность Pavailable минус обе мощности Psensor датчика и Pshunt шунта. Может требоваться только периодическое определение мощности 241 контроллера, так как мощность Pcontroller контроллера очень мало меняется со временем.
Прогнозируемая доступная мощность Ppredicted 242 является потребляемой мощностью, которая прогнозируется для конкретного значения 243 измерения. Прогнозируемая доступная мощность Ppredicted 242 используется для определения того, вызовет ли значение 243 измерения превышение инструментом 10 шины мощности Pcontroller контроллера плюс мощности Psensor 249 датчика. Определение может быть использовано для уменьшения энергопотребления, так что прогнозируемый ток 247 контура IL_next не приведет к энергопотреблению, превышающему полную доступную мощность.
Значение 243 измерения содержит значение измерения, принятое с датчика 13. Значение 243 измерения в некоторых вариантах воплощения непрерывно обновляется с приемом новых значений измерения.
Напряжение VL 244 контура содержит измерение или другое определение напряжения на инструменте 10 шины. Напряжение VL 244 контура может меняться с изменением тока IL 248 контура.
Сопротивление RL 245 контура содержит измерение или другое определение электрического сопротивления в двухпроводном шинном контуре 4 (см. уравнение 1 ниже). Сопротивление RL 245 контура может быть сконфигурировано с возможностью иметь стандартное значение и обычно остается, по существу, постоянным.
Напряжение VS 246 питания содержит определение значения напряжения. Напряжение VS 246 питания может быть определено в соответствии с уравнением 2 (см. ниже).
Прогнозируемый ток IL_next 247 контура содержит прогноз будущего тока контура на основе (нового) значения 243 измерения. Прогнозируемый ток IL_next 247 контура может быть таким же, как текущий ток IL 248 контура, больше или меньше. Следовательно, прогнозируемый ток IL_next 247 контура проверяется первым для проверки того, превысит ли полную доступную мощность Pavailable 241 применение прогнозируемого тока IL_next 247 контура (в качестве фактического тока IL 248 контура).
Ток IL 248 контура определяют в соответствии со значением 243 измерения, например, с помощью измерения скорости протекания. Результат 243 измерения обуславливает ток IL 248 контура, и, следовательно, ток IL 248 контура является известным.
Мощность Psensor 249 датчика содержит мощность, потребляемую датчиком 13. Мощность Psensor 249 датчика содержит ток Isensor датчика, умноженный на известное внутреннее регулируемое напряжение. Ток Isensor датчика может быть измерен амперметром 250.
В процессе работы программа 240 обработки выполняется системой 203 обработки. Программа 240 обработки управляет инструментом 10 шины для генерации одного или более измерений, например одного или более измерений потока, как обсуждалось ранее. Дополнительно, программа 240 обработки может управлять инструментом 10 шины для прогнозируемого ограничения энергопотребления. Программа 240 обработки может реализовывать различные алгоритмы ограничения мощности, как обсуждается ниже.
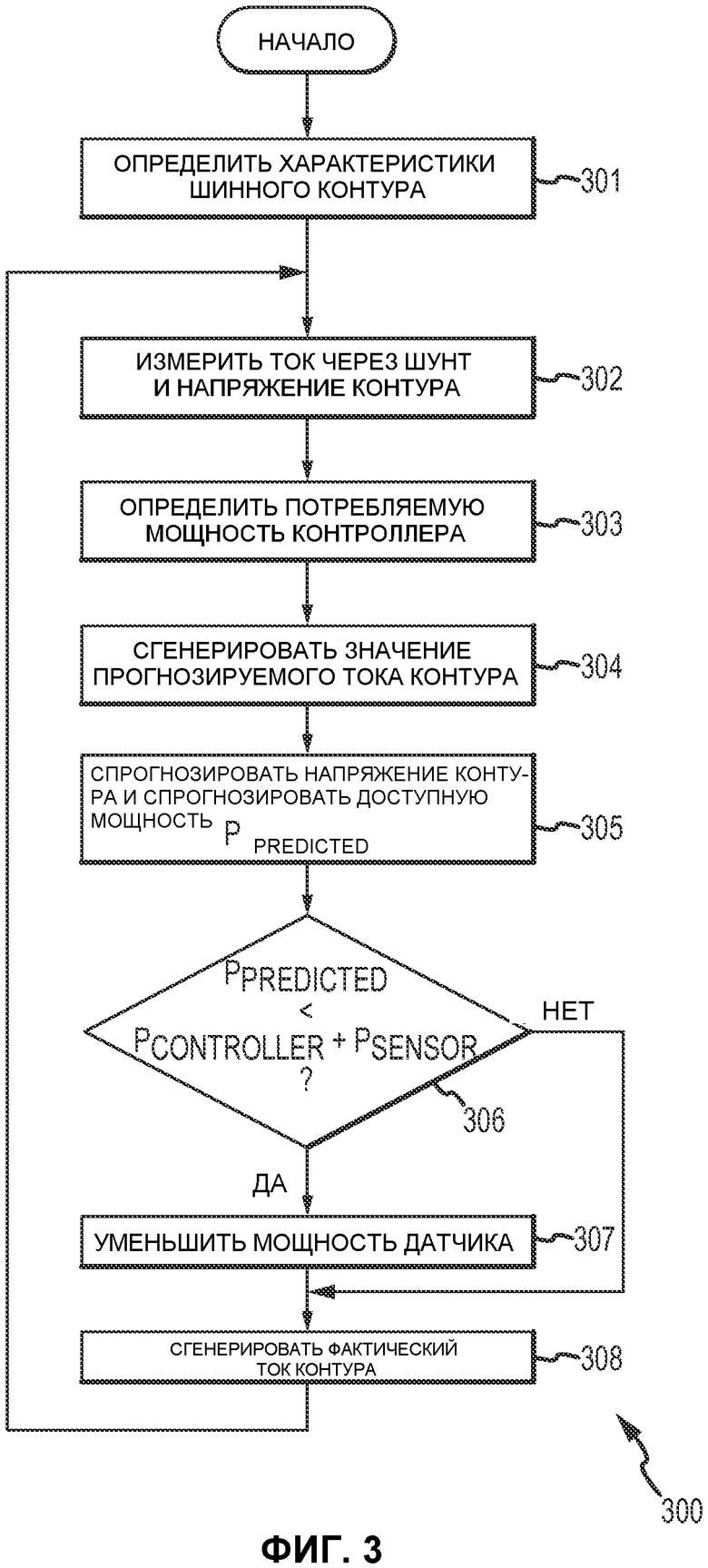
Фиг. 3 изображает блок-схему 300 последовательности этапов способа для прогнозируемого ограничения энергопотребления в инструменте шины двухпроводной инструментальной шины согласно варианту воплощения изобретения. По данному способу, по существу, потребляют полную доступную мощность в течение всего времени. На этапе 301 определяют напряжение VS питания и сопротивление RL контура. Это может быть сделано до начала работы датчика, например при запуске или перезагрузке. Напряжение VS питания и сопротивление RL контура могут быть определены из значений измерения напряжения VL контура и тока IL контура, полученных до начала работы, и могут быть, по существу, использованы при работе инструмента шины.
Сопротивление RL контура в некоторых вариантах воплощения определяют из характеристик системы 100 шинного контура. Например, сопротивление RL контура может быть определено из двух наборов измерений напряжения и тока согласно уравнению:
Напряжение VS питания может быть определено из измеренного напряжения VL контура, определенного сопротивления RL контура и известного тока IL контура. Может быть использован один набор (VL1, IL1) или (VL2, IL2) предпусковых измерений контура. Напряжение VS питания может быть определено согласно уравнению
На этапе 302 измеряют ток Ishunt через шунт и напряжение VL контура в течение времени фактической работы инструмента шины. Следует понимать, что эти два значения могут быть измерены в каждом измерительном цикле или могут изменяться периодически, если не ожидается их радикальное изменение.
На этапе 303 вычисляют мощность Pcontroller, потребляемую контроллером. Полная мощность Pavailable, доступная/потребляемая в системе шинного контура, содержит
Индивидуальное значение мощности может быть определено из напряжения контура, умноженного на индивидуальные токи Ishunt, Icontroller и Isensor.
Следовательно, мощность Pcontroller контроллера содержит
Полная доступная мощность Pavailable известна и, по существу, управляется/ограничивается в соответствии со способом. Мощность Pcontroller контроллера является, по существу, фиксированной. Тем не менее, мощность Psensor датчика в некоторых вариантах воплощения может быть настроена и, следовательно, может быть использована, чтобы гарантировать, что полная доступная мощность Pavailable не выходит за пределы протокола шины или I.S.
На этапе 304 с датчика принимают следующее значение измерения и используют его для генерации прогнозируемого тока IL_next контура. Тем не менее, прогнозируемый ток IL_next контура еще не реализован. Вместо этого сначала оценивают влияние на энергопотребление. Таким образом, способ может избежать избыточного энергопотребления компенсацией будущего изменения тока контура.
На этапе 305 генерируют прогнозируемое напряжение VL_next контура и прогнозируемую доступную мощность Ppredicted. Прогнозируемое напряжение VL_next контура содержит прогноз напряжения на инструменте шины в соответствии с известным напряжением VS питания и прогнозируемым током IL_next контура. Прогнозируемое напряжение VL_next контура, следовательно, содержит прогноз влияния прогнозируемого тока IL_next контура на напряжение VL контура. Прогнозируемое напряжение VL_next контура может быть определено согласно уравнению
Прогнозируемая доступная мощность Ppredicted содержит прогноз полной мощности, которая будет обеспечена для инструмента шины, на основе прогнозируемого тока IL_next контура. Прогнозируемую доступную мощность Ppredicted определяют согласно уравнению
На этапе 306 прогнозируемую доступную мощность Ppredicted сравнивают с текущим энергопотреблением. Так как доступная мощность всегда потребляется инструментом шины, ток Ishunt через шунт будет существовать, только если электрический ток, доступный инструменту шины, больше, чем ток, потребляемый датчиком и контроллером. Тем не менее, так как энергопотребление становится критичным, и мощность Psensor датчика достигает значения доступной мощности, мощность, потребляемая параллельным стабилизатором, будет, по существу, нулевой, т.е. вся мощность потребляется датчиком и контроллером, поэтому энергопотребление Pt0 в текущий момент времени содержит Pt0=Pcontroller+Psensor. Следовательно, прогнозируемую доступную мощность Ppredicted сравнивают с мощностью Pcontroller контроллера и мощностью Psensor датчика. Если прогнозируемая доступная мощность Ppredicted меньше, чем мощность Pcontroller контроллера плюс мощность Psensor датчика, тогда прогнозируемая доступная мощность Ppredicted является недостаточной, и мощность Psensor датчика нужно будет уменьшить, чтобы избежать сбоя энергопотребления.
На этапе 307, поскольку прогнозируемая доступная мощность Ppredicted может превысить доступную мощность, представленную (Pcontroller+Psensor), мощность Psensor датчика уменьшают. В некоторых вариантах воплощения буфер между прогнозируемой доступной мощностью Ppredicted и доступной мощностью поддерживают посредством фактора безопасности. В одном варианте воплощения прогнозируемую доступную мощность Ppredicted используют для соответствующего уменьшения мощности Psensor датчика и генерации уменьшенной мощности Psensor_reduced датчика. Например, уменьшенная мощность Psensor_reduced датчика может быть сгенерирована согласно уравнению
Уменьшенная мощность Psensor_reduced датчика может достигать полного уменьшения мощности. Например, уменьшение мощности может включать в себя уменьшение тока Isensor через датчик. Альтернативно, может быть уменьшено напряжение Vsensor на датчике или оба значения.
На этапе 308 генерируют новый ток IL контура (т.е. IL_next) по значению измерения. Так как мощность Psensor датчика уже изменена для компенсации результата измерения, по необходимости, изменение тока IL контура не должно влиять на работу инструмента шины и не должно превышать ограничения по мощности в двухпроводном шинном контуре 4. Способ может затем вернуться к этапу 302, многократно обрабатывая результаты измерения.
Изобретение относится к инструменту шины и способу для прогнозируемого ограничения энергопотребления в двухпроводной шине. Техническим результатом является повышение надежности работы инструмента шины. Представлен инструмент (10) шины, сконфигурированный для прогнозируемого ограничения энергопотребления и выполненный с возможностью использования с двухпроводной инструментальной шиной. Инструмент (10) шины включает в себя датчик (13), параллельный стабилизатор (14) и контроллер (20). Контроллер (20) сконфигурирован для генерации прогнозируемой доступной мощности Ppredicted, которая будет доступна инструменту (10) шины после изменения тока IL контура, сравнения прогнозируемой доступной мощности Ppredicted с мощностью Pt0 в текущий момент времени, содержащей мощность Pcontroller контроллера плюс мощность Psensor датчика, и уменьшения мощности Psensor датчика, если полная доступная мощность Pavailable меньше, чем мощность Pcontroller контроллера плюс мощность Psensor датчика. 2 н. и 8 з.п. ф-лы, 3 ил.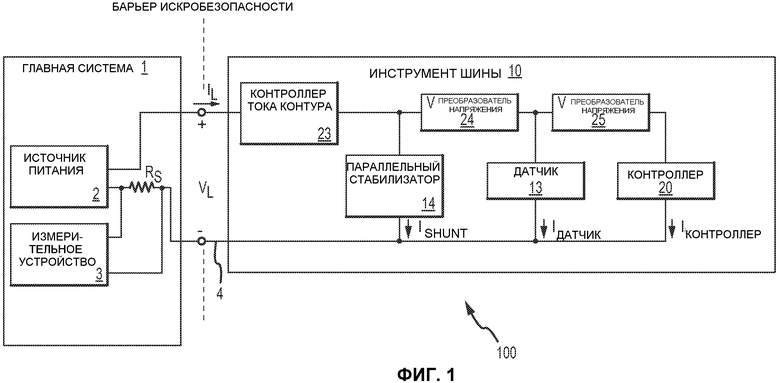
1. Инструмент (10) шины, сконфигурированный для прогнозируемого ограничения энергопотребления и выполненный с возможностью использования с двухпроводной инструментальной шиной, содержащий:
датчик (13);
параллельный стабилизатор (14), сконфигурированный для шунтирования избыточного электрического тока; и
контроллер (20), соединенный с параллельным регулятором (14) и датчиком (13), причем контроллер (20) сконфигурирован для генерации прогнозируемой доступной мощности (Ppredicted), которая будет доступна инструменту (10) шины после изменения тока IL контура, сравнения прогнозируемой доступной мощности Ppredicted с мощностью Pt0 в текущий момент времени, содержащей мощность Pcontroller контроллера плюс мощность Psensor датчика, и уменьшения мощности Psensor датчика, если прогнозируемая доступная мощность Ppredicted меньше, чем мощность Pcontroller контроллера плюс мощность Psensor датчика.
2. Инструмент (2) шины по п.1, в котором контроллер (20) дополнительно сконфигурирован для приема значения измерения с датчика (13) и генерации прогнозируемого тока IL-next контура из значения измерения, причем прогнозируемая доступная мощность Ppredicted генерируется с использованием прогнозируемого тока IL-next контура.
3. Инструмент (10) шины по п.1, в котором уменьшение мощности Psensor датчика включает в себя уменьшение тока Isensor датчика, обеспеченного для датчика (13).
4. Инструмент (10) шины по п.1, в котором контроллер (20) дополнительно сконфигурирован для определения сопротивления RL контура и напряжения VS питания.
5. Инструмент (10) шины по п.1, в котором контроллер (20) дополнительно сконфигурирован для измерения первого напряжения VL1 контура при заданном первом токе IL1 контура, измерения второго напряжения VL2 контура при заданном втором токе IL2 контура и определения сопротивления RL контура из первого и второго напряжений VL1 и VL2 контура и первого и второго токов IL1 и IL2 контура.
6. Способ для прогнозируемого ограничения энергопотребления в инструменте шины двухпроводной инструментальной шины, содержащий этапы, на которых:
генерируют прогнозируемую доступную мощность Ppredicted, которая будет доступна инструменту шины после изменения тока IL контура;
сравнивают прогнозируемую доступную мощность Ppredicted с мощностью Pt0 в текущий момент времени, содержащей мощность Pcontroller контроллера плюс мощность Psensor датчика; и
уменьшают мощность Psensor датчика, если прогнозируемая доступная мощность Ppredicted меньше, чем мощность Pcontroller контроллера плюс мощность Psensor датчика.
7. Способ по п.6, дополнительно содержащий этапы, на которых: принимают значение измерения с датчика;
генерируют прогнозируемый ток IL-next контура по значению измерения, причем
прогнозируемую доступную мощность Ppredicted генерируют с использованием прогнозируемого тока IL-next контура.
8. Способ по п.6, в котором уменьшение мощности Psensor датчика включает в себя этап, на котором уменьшают ток Isensor через датчик, обеспеченный для датчика.
9. Способ по п.6, дополнительно содержащий предварительный этап, на котором определяют сопротивление RL контура и напряжение Vs питания.
10. Способ по п.9, в котором определение сопротивления RL контура содержит предварительные этапы, на которых:
измеряют первое напряжение VL1 контура при заданном первом токе IL1 контура;
измеряют второе напряжение VL2 контура при заданном втором токе IL2 контура; и
определяют сопротивление RL контура из первого и второго напряжений VL1 и VL2 контура и первого и второго токов IL1 и IL2 контура.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| ЕР 0895209 А, 03.02.1999 | |||
| Способ получения полимерной композиции | 1979 |
|
SU883097A1 |
| ПРЕОБРАЗОВАТЕЛЬ СИГНАЛА ЦЕПИ УПРАВЛЕНИЯ ПРОЦЕССОМ | 2004 |
|
RU2328763C2 |

