Область техники, к которой относится изобретение
Изобретение относится к способу испытания педальной системы воздушного судна и к устройству для осуществления этого способа.
Уровень техники
Тормоза и руль воздушного судна, в частности, пассажирского самолета, обычно приводят в действие при помощи педалей, расположенных в кабине воздушного судна. Как правило, устанавливают две идентичные пары педалей для управления тормозами и рулем воздушного судна - одну для командира, а другую для первого пилота воздушного судна. Правая педаль каждой пары педалей служит для того, чтобы приводить в действие правый тормоз воздушного судна и вызывать отклонение вправо руля воздушного судна. Левая педаль каждой пары педалей служит для того, чтобы приводить в действие левый тормоз воздушного судна и вызывать отклонение влево руля воздушного судна. Для приведения в действие тормозов воздушного судна педали можно поворачивать вокруг оси поворота, в то время как приведение в действие руля воздушного судна можно обеспечить путем нажатия на педали вперед, т.е. в направлении переднего конца воздушного судна.
В некоторых типах воздушных судов, в частности, в узкофюзеляжных воздушных судах, тормозная система воздушного судна представляет собой тормозную систему с электрическим управлением. Такая тормозная система с электрическим управлением может содержать электронный блок управления, который принимает сигналы от датчиков педалей, показывающие, например, усилие воздействия, приложенное к педали, и/или скорость воздействия на педаль. Затем на основании сигналов, полученных от датчиков педалей, электронный блок управления вырабатывает управляющие команды, которые передаются на устройство включения тормозов для того, чтобы привести в действие тормоза в соответствии со срабатыванием педали. Рулевая система воздушного судна может представлять собой систему с электрическим управлением, однако, альтернативно может также быть механической системой, содержащей тросы, которые после воздействия на рулевую педаль механически передают усилие воздействия, приложенное к педали, на руль, чтобы обеспечить его поворот.
Во время окончательной сборки воздушного судна необходимо проверять правильность функционирования тормозной и рулевой педальной системы воздушного судна. В частности, необходимо проводить испытание тормозной и рулевой педальной системы воздушного судна для того, чтобы выявить дефекты отдельных компонентов или дефекты сборки, которые могли бы мешать правильному функционированию тормозной и рулевой педальной системы воздушного судна.
Раскрытие изобретения
Задачей настоящего изобретения является обеспечение способа испытания педальной системы воздушного судна и устройства для осуществления этого способа, которые позволят надежно и оперативно проверять правильность функционирования педальной системы воздушного судна.
Для решения вышеуказанной задачи устройство для испытания педальной системы воздушного судна согласно изобретению содержит устройство приведения в действие педали. Устройство приведения в действие педали предпочтительно представляет собой механическое устройство, которое служит для механического воздействия на педаль воздушного судна. Кроме того, устройство согласно изобретению содержит датчик усилия, предназначенный для измерения усилия воздействия, приложенного к педали воздушного судна при воздействии на педаль воздушного судна при помощи устройства приведения в действие педали. Датчик усилия также выполнен с возможностью подачи сигнала, соответствующего усилию воздействия, измеренному указанным датчиком. Устройство измерения отклонения, имеющееся в устройстве для испытания педальной системы воздушного судна согласно изобретению, предназначено для измерения углового отклонения компонента, отклоняющегося в ответ на воздействие на педаль воздушного судна. И, наконец, устройство согласно изобретению содержит блок управления, который выполнен с возможностью обработки сигналов датчика усилия и устройства измерения отклонения с целью генерирования выходных сигналов, показывающих угловое отклонение компонента, отклоняющегося в результате воздействия на педаль воздушного судна в зависимости от усилия воздействия, приложенного к педали воздушного судна. Блок управления может представлять собой, например, стационарный персональный компьютер или портативный компьютер.
Как подробно поясняется выше, тормозной системой и рулем воздушного судна можно управлять при помощи одной пары педалей, установленных в кабине воздушного судна. Для приведения в действие тормоза воздушного судна педаль поворачивают вокруг оси поворота, в то время как приведение в действие руля воздушного судна обеспечивают путем нажатия на педаль вперед, т.е. в направлении переднего конца воздушного судна. Таким образом, за счет соответствующего выбора точки приложения усилия к педали устройство согласно изобретению можно использовать для испытания работы тормоза воздушного судна или работы руля. В зависимости от того, используют ли данное устройство для испытания работы тормоза воздушного судна или работы руля, устройство измерения отклонения производит измерение отклонения компонента тормозной системы воздушного судна или отклонения компонента рулевой системы воздушного судна.
Выходные данные блока управления, которые показывают угловое отклонение компонента, отклоняющегося в результате воздействия на педаль воздушного судна в зависимости от усилия воздействия, приложенного к педали воздушного судна, можно получить в виде таблицы данных и/или диаграммы, показывающей график углового отклонения компонента, отклоняющегося в результате воздействия на педаль воздушного судна в зависимости от усилия воздействия, приложенного к педали воздушного судна. Такая таблица и/или диаграмма может отображаться на дисплее блока управления и/или выводиться на печать при помощи принтера, который подключен к блоку управления и управляется этим блоком. Данные, полученные блоком управления во время проведения испытания, могут быть сохранены в запоминающем устройстве, которое может представлять собой встроенный компонент блока управления или отдельный блок памяти. Устройство для испытания педальной системы воздушного судна согласно изобретению позволяет надежно и оперативно проверять правильность функционирования педальной системы воздушного судна и представлять пользователю результаты испытания при помощи блока управления. Таким образом, блок управления образует интерфейс человек-машина устройства для испытания согласно изобретению.
Блок управления устройства для испытания педальной системы воздушного судна согласно изобретению может быть выполнен с возможностью управления устройством приведения в действие педали. Блок управления может управлять устройством приведения в действие педали, в частности, при помощи соответствующей компьютерной программы, которая выполняется в блоке управления и обеспечивает подачу блоком управления соответствующих управляющих команд на устройство приведения в действие педали. Управляющие команды, которые блок управления подает на устройство приведения в действие педали, могут быть выбраны в соответствии с предварительно установленными требованиями к испытаниям, которые определяют контролируемые параметры, например, номинальное усилие воздействия на педаль, скорость воздействия на педаль и т.п.
Устройство для испытания педальной системы воздушного судна согласно изобретению может быть также встроено в среду испытаний более высокого уровня. Среда испытаний более высокого уровня может быть предназначена для моделирования конкретных ситуаций, например, летных ситуаций, в то время как воздушное судно находится на земле. В этом случае устройство согласно изобретению можно использовать, например, для проверки функционирования тормозной и/или рулевой системы воздушного судна после воздействия на педали тормоза и педали руля, соответственно, в конкретной ситуации, которую моделирует среда испытаний.
Устройство приведения в действие педали в устройстве согласно изобретению предпочтительно содержит электродвигатель, например, линейный электродвигатель постоянного тока, который предназначен для перемещения рычага передачи усилия, присоединенного с возможностью поворота к основной конструкции устройства приведения в действие педали. Электродвигатель может быть соединен с рычагом передачи усилия при помощи червячной передачи. Основная конструкция устройства приведения в действие педали предпочтительно выполнена с возможностью присоединения к конструктивному компоненту воздушного судна. Рычаг передачи усилия может соединяться с тягой приложения усилия, предназначенной для приложения усилия воздействия к педали воздушного судна.
Для проведения испытания педали тормоза воздушного судна или педали руля воздушного судна основная конструкция устройства приведения в действие педали может быть прикреплена к конструктивному компоненту воздушного судна, предпочтительно - к панели пола, расположенной в кабине экипажа воздушного судна. Далее тяга приложения усилия может быть присоединена к педали воздушного судна при помощи соответствующего зажимного приспособления. Точку приложения усилия к педали, т.е. точку соединения тяги приложения усилия с педалью можно выбрать в зависимости от того, проводится ли испытание тормозной системы воздушного судна или рулевой системы воздушного судна. В случае испытания тормозной системы воздушного судна точку приложения усилия к педали следует выбирать таким образом, чтобы срабатывание устройства приведения в действие педали вызывало поворот педали. И, напротив, в случае испытания рулевой системы воздушного судна точку приложения усилия к педали следует выбирать таким образом, чтобы срабатывание устройства приведения в действие педали вызывало поступательное движение педали в направлении переднего конца воздушного судна.
Для воздействия на педаль воздушного судна электродвигатель устройства приведения в действие педали может функционировать таким образом, чтобы уменьшать длину червяка червячной передачи и, следовательно, вызывать поворот рычага передачи усилия в направлении вперед, т.е. в направлении педали воздушного судна. Вследствие поворота рычага передачи усилия движущая сила электродвигателя передается на тягу приложения усилия и, следовательно, на педаль воздушного судна. Работой электродвигателя можно управлять при помощи блока управления в соответствии с предварительно установленными контролируемыми параметрами, которые образуют основу компьютерной программы, выполняющейся в блоке управления.
Датчик усилия, предназначенный для измерения усилия воздействия, приложенного к педали воздушного судна при воздействии на педаль воздушного судна, предпочтительно соединен с тягой приложения усилия. Поскольку тяга приложения усилия представляет собой устройство, которое непосредственно прикладывает к педали воздушного судна усилие воздействия, создаваемое электродвигателем устройства приведения в действие педали воздушного судна, расположение указанного датчика на тяге приложения усилия позволяет особенно надежно и точно измерять усилие, приложенное к педали воздушного судна.
Как указано выше, устройство согласно изобретению можно использовать для испытания работы тормоза воздушного судна или для испытания работы руля воздушного судна. Если устройство используют для испытания работы тормоза воздушного судна, устройство измерения отклонения предпочтительно представляет собой устройство измерения углового отклонения, т.е. поворота педали воздушного судна в ответ на воздействие на педаль воздушного судна. Поскольку тормозная система воздушного судна обычно представляет собой тормозную систему с электрическим управлением, поворот педали воздушного судна в ответ на воздействие на педаль воздушного судна является важным параметром правильного функционирования тормозной системы.
Устройство измерения отклонения педали может представлять собой потенциометр, который может быть непосредственно присоединен к педали воздушного судна. Однако предпочтительно устройство измерения отклонения педали устанавливают на рычаге передачи усилия устройства приведения в действие педали воздушного судна. Иными словами, устройство измерения отклонения педали предпочтительно измеряет отклонение или угол поворота рычага передачи усилия, который непосредственно соответствует угловому отклонению педали воздушного судна. Благодаря использованию устройства измерения отклонения педали, представляющего собой встроенный компонент устройства приведения в действие педали, можно исключить установку устройства измерения отклонения педали на педали воздушного судна в целях испытания. Это существенно упрощает установку устройства для испытания согласно изобретению на борту воздушного судна.
Если устройство согласно изобретению используют для испытания работы руля воздушного судна, устройство измерения отклонения педали предпочтительно представляет собой устройство измерения углового отклонения руля воздушного судна в ответ на воздействие на педаль воздушного судна. Поскольку рулевая система воздушного судна обычно представляет собой механическую систему тросов, фактическое отклонение руля в ответ на воздействие на педаль воздушного судна является важным параметром правильного функционирования рулевой системы. Устройство измерения отклонения руля может представлять собой потенциометр, который может быть непосредственно присоединен к рулю воздушного судна. Предпочтительно датчик отклонения руля, который является компонентом рулевой системы воздушного судна, используют в качестве устройства измерения отклонения путем простого подсоединения датчика отклонения руля к блоку управления устройства согласно изобретению.
В предпочтительном варианте осуществления устройство для испытания педальной системы воздушного судна согласно изобретению содержит устройство усиления сигналов. Устройство усиления сигналов может быть включено между блоком управления и датчиком усилия для того, чтобы усиливать сигналы, которыми обмениваются блок управления и датчик усилия. Устройство усиления сигналов предпочтительно не усиливает сигналы, которыми обмениваются блок управления и устройства измерения отклонений. Однако можно модифицировать устройство усиления сигналов таким образом, чтобы обеспечить также усиление сигналов обмена между блоком управления и устройствами измерения отклонений.
Устройство согласно изобретению может также содержать блок регулирования электропитания, который выполнен с возможностью регулирования электропитания различных компонентов устройства, в частности, компонентов устройства приведения в действие педали. Так, например, блок регулирования электропитания может быть выполнен с возможностью регулирования электропитания электродвигателя, датчика усилия и потенциометра измерения углового отклонения педали воздушного судна после приложения усилия воздействия к педали воздушного судна.
Устройство согласно изобретению предпочтительно содержит единый интерфейсный компонент, который служит для усиления сигналов, которыми обмениваются блок управления и устройство приведения в действие педали, и для регулирования электропитания различных компонентов устройства, в частности, компонентов устройства приведения в действие педали. Уровни сигналов устройства для испытания педальной системы воздушного судна согласно изобретению являются относительно низкими. Поэтому устройство согласно изобретению имеет низкую чувствительность к воздействию электромагнитных помех.
Устройство согласно изобретению может также содержать аналого-цифровой преобразователь, предназначенный для преобразования сигналов, которыми обмениваются блок управления и интерфейсный компонент усиления сигналов и регулирования электропитания.
Блок управления устройства для испытания педальной системы воздушного судна согласно изобретению может быть соединен с сервером базы данных. Соединение блока управления и сервера базы данных можно обеспечить при помощи локальной сети передачи данных (Local Area Network, LAN). При этом данные, полученные в ходе испытания, можно легко сохранять в запоминающем устройстве сервера базы данных, что снижает опасность потери данных в случае неисправности запоминающего устройства блока управления.
Блок управления может быть выполнен с возможностью сравнения величины углового отклонения, измеренной при помощи устройства измерения отклонения при предварительно установленном усилии воздействия, с номинальной величиной углового отклонения при предварительно установленном усилии воздействия. Предпочтительно имеется возможность сравнивать два различных значения углового отклонения, измеренных при двух различных предварительно установленных значениях усилия воздействия, с двумя различными номинальными значениями углового отклонения при указанных двух предварительно установленных значениях усилия воздействия. Номинальные значения углового отклонения могут быть сохранены, например, в запоминающем устройстве блока управления или сервера базы данных. Кроме того, блок управления может быть выполнен с возможностью подачи предупредительного сигнала, если разность между значением углового отклонения, измеренным при помощи устройства измерения отклонения, и номинальным значением углового отклонения при предварительно установленном усилии воздействия превышает предварительно установленный предел. Предупредительный сигнал может подаваться в виде сообщений определенных цветов на экране дисплея блока управления. Однако возможна также подача акустического предупредительного сигнала при помощи блока управления или при помощи отдельного устройства подачи предупредительного сигнала.
Блок управления может быть выполнен с возможностью сравнения, в частности, измеренного минимального и/или максимального значения углового отклонения и/или измеренного минимального и/или максимального значения усилия воздействия, и/или измеренной величины сцепления, и/или измеренной величины симметрии с соответствующими номинальными значениями. Предупредительный сигнал может подаваться, если разность между измеренным значением и номинальным значением превышает предварительно установленный предел.
Способ испытания педальной системы воздушного судна согласно изобретению включает операции, на которых воздействуют на педаль воздушного судна при помощи устройства приведения в действие педали, измеряют усилие воздействия, приложенное к педали воздушного судна при воздействии на педаль воздушного судна, и обеспечивают подачу сигнала, соответствующего усилию воздействия, при помощи датчика усилия, и измеряют угловое отклонение компонента, отклоняющегося в ответ на воздействие на педаль воздушного судна, при помощи устройства измерения отклонения. В зависимости от испытания работы тормоза или руля устройство измерения отклонения измеряет отклонение компонента тормозной системы воздушного судна или компонента рулевой системы воздушного судна. Блок управления обрабатывает сигналы датчика усилия и устройства измерения отклонения. Затем блок управления генерирует выходной сигнал, показывающий угловое отклонение компонента, отклоняющегося в ответ на воздействие на педаль воздушного судна в зависимости от усилия воздействия, приложенного к педали воздушного судна.
Способ согласно изобретению предпочтительно включает операцию, на которой приводят в действие рычаг передачи усилия, соединенный с тягой приложения усилия, предназначенной для приложения усилия воздействия к педали воздушного судна, при помощи электродвигателя, например, линейного электродвигателя постоянного тока, который может быть присоединен к рычагу передачи усилия посредством червячной передачи.
Усилие воздействия, приложенное к педали воздушного судна, при воздействии на педаль воздушного судна можно измерить при помощи датчика усилия, соединенного с тягой приложения усилия.
В случае испытания работы тормоза воздушного судна устройство измерения отклонения предпочтительно измеряет угловое отклонение, т.е. поворот педали воздушного судна в ответ на воздействие на педаль воздушного судна. Если тормозная система воздушного судна представляет собой тормозную систему с электрическим управлением, отклонение педали воздушного судна в ответ на воздействие на педаль воздушного судна является важным параметром правильного функционирования тормозной системы.
Однако, если требуется провести испытание работы руля воздушного судна, устройство измерения отклонения предпочтительно измеряет угловое отклонение руля воздушного судна в ответ на воздействие на педаль воздушного судна. Если рулевая система воздушного судна представляет собой механическую систему тросов, фактическое отклонение руля в ответ на воздействие на педаль воздушного судна является важным параметром правильного функционирования рулевой системы.
Способ согласно изобретению может также содержать операцию, на которой усиливают сигналы, которыми обмениваются блок управления и датчик усилия. Кроме того, может осуществляться регулирование электропитания компонентов устройства приведения в действия педали.
Сигналы, которыми обмениваются блок управления и устройство усиления сигналов и регулирования электропитания, могут быть преобразованы при помощи аналого-цифрового преобразователя.
Данные, полученные в ходе испытания педальной системы воздушного судна, предпочтительно сохраняют в запоминающем устройстве сервера базы данных, который соединен с блоком управления. При этом можно минимизировать опасность потери данных в случае неисправности запоминающего устройства блока управления.
И, наконец, способ согласно изобретению может содержать операцию, на которой сравнивают величину углового отклонения, измеренную при помощи устройства измерения отклонения при предварительно установленном усилии воздействия, с номинальной величиной углового отклонения при предварительно установленном усилии воздействия. Кроме того, может подаваться предупредительный сигнал, если разность между значением углового отклонения, измеренным при помощи устройства измерения отклонения, и номинальным значением углового отклонения при предварительно установленном усилии воздействия превышает предварительно установленный предел.
В частности, можно сравнивать измеренное минимальное и/или максимальное значение углового отклонения и/или измеренное минимальное и/или максимальное значение усилия воздействия, и/или измеренную величину сцепления, и/или измеренную величину симметрии с соответствующими номинальными значениями. Предупредительный сигнал может подаваться, если разность между измеренным значением и номинальным значением превышает предварительно установленный предел.
При окончательной сборке воздушного судна испытание, подробно описанное выше, можно производить для обеих педалей педального тормозного устройства пары педалей командира и для обеих педалей педального тормозного устройства пары педалей первого пилота. Аналогично этому можно производить испытание для обеих педалей педального рулевого устройства пары педалей командира и для обеих педалей педального рулевого устройства пары педалей первого пилота.
Далее настоящее изобретение подробно поясняется со ссылками на схематический чертеж, на котором представлен предпочтительный вариант осуществления устройства для испытания педальной системы воздушного судна согласно изобретению.
Осуществление изобретения
Устройство 10 для испытания педальной системы 12 воздушного судна содержит устройство 14 приведения в действие педали, предназначенное для воздействия на педаль 12', 12” воздушного судна. Педальная система 12 воздушного судна, показанная на чертеже, представляет собой одну из двух идентичных пар педалей 12, установленных в кабине воздушного судна, при этом первая пара педалей 12 предназначена для командира, а вторая пара педалей 12 - для первого пилота воздушного судна. Правая педаль 12” каждой пары педалей 12 служит для приведения в действие правого (не показанного на чертеже) тормоза воздушного судна и для отклонения вправо руля 13 воздушного судна. Левая педаль 12' каждой пары педалей 12 служит для приведения в действие левого (не показанного на чертеже) тормоза воздушного судна и для отклонения влево руля 13 воздушного судна. Для приведения в действие тормозов воздушного судна педали 12', 12” поворачивают вокруг оси T поворота, в то время как руль 13 воздушного судна можно привести в действие путем нажатия на педали 12', 12” вперед, т.е. в направлении переднего конца воздушного судна.
Тормозная система воздушного судна представляет собой тормозную систему с электрическим управлением, т.е. сигналы от датчиков педалей (не показанных на чертеже), указывающие, например, усилие воздействия на педаль и/или скорость воздействия на педаль, обрабатываются блоком управления, который управляет устройством приведения в действие электромагнитного тормоза в зависимости от сигналов, полученных от датчиков педалей. В отличие от этого руль 13 приводится в действие механической системой тросов (не показанной на чертеже), которая передает рулю 13 усилие воздействия на педаль для того, чтобы вызывать поворот руля 13.
Устройство 14 приведения в действие педали содержит линейный электродвигатель 16 постоянного тока, который при помощи червячной передачи 20 соединен с рычагом 18 передачи усилия. Рычаг 18 передачи усилия установлен с возможностью поворота на основной конструкции 22, при этом основную конструкцию 22 можно присоединять к конструктивному компоненту воздушного судна. Тяга 24 приложения усилия соединена с поворотным рычагом 18 передачи усилия и служит для приложения усилия воздействия, создаваемого электродвигателем 16, к педали 12” воздушного судна.
Датчик усилия 26 установлен на тяге 24 приложения усилия и предназначен для измерения усилия воздействия, приложенного к педали 12" воздушного судна электродвигателем 16 посредством червячной передачи 20, рычага 18 передачи усилия и тяги 24 приложения усилия. Первый потенциометр, который служит в качестве устройства 28 измерения отклонения педали, установлен на поворотном рычаге 18 передачи усилия устройства 14 приведения в действие педали. Таким образом, устройство 28 измерения отклонения педали обеспечивает измерение отклонения или угла поворота рычага 18 передачи усилия, который непосредственно соответствует угловому отклонению педали 12” воздушного судна после приложения соответствующего усилия воздействия к педали 12” воздушного судна. Второй потенциометр, который служит в качестве устройства 30 измерения отклонения руля, присоединен непосредственно к рулю 13 и, таким образом, непосредственно измеряет отклонение руля 13 после приложения соответствующего усилия воздействия к педали 12” воздушного судна.
Устройство 14 приведения в действие педали соединено с блоком управления, который представляет собой портативный компьютер 32. Блок 32 управления осуществляет управление электродвигателем 16 устройства 14 приведения в действие педали в соответствии с компьютерной программой, выполняющейся в блоке 32 управления и заставляющей блок 32 управления подавать соответствующие управляющие сигналы на электродвигатель 16 устройства 14 приведения в действие педали. Управляющие сигналы, подаваемые блоком 32 управления, выбирают на основе предварительно установленных требований к испытанию, которые определяют различные контролируемые параметры, например, номинальное усилие воздействия на педаль, скорость воздействия на педаль и т.п.
Блок 32 управления осуществляет также прием и обработку сигналов, поступающих от датчика 26 усилия, устройства 28 измерения отклонения педали и устройства 30 измерения отклонения руля. Сигналы, которыми обмениваются блок 32 управления и датчик 26 усилия, усиливаются устройством 34 усиления сигналов и регулирования электропитания. Устройство 34 усиления сигналов и регулирования электропитания служит также для того, чтобы регулировать электропитание электродвигателя 16, датчика 26 усилия и устройства 28 измерения отклонения педали; Аналого-цифровой преобразователь 36 используют для преобразования сигналов, которыми обмениваются блок 32 управления и устройство 34 усиления сигналов и регулирования электропитания.
Блок 32 управления содержит дисплей 38 и соединяется с принтером (не показан на чертеже). Кроме того, блок 32 управления соединяется с сервером 40 базы данных, при этом данные, получаемые блоком 32 управления во время проведения испытания педальной системы воздушного судна, можно сохранять в запоминающем устройстве сервера 40 базы данных.
Для проведения испытания педали тормоза или педали руля воздушного судна основную конструкцию 22 устройства 14 приведения в действие педали прикрепляют к панели пола, расположенной в кабине экипажа воздушного судна. Затем тягу 24 приложения усилия присоединяют к педали 12” воздушного судна при помощи подходящего зажимного приспособления. Точку приложения усилия к педали 12”, т.е. точку присоединения тяги 24 приложения усилия к педали 12”, выбирают в зависимости от того, проводят ли испытания тормозной системы воздушного судна или рулевой системы воздушного судна. В случае испытания тормозной системы воздушного судна точку приложения усилия к педали 12” выбирают таким образом, чтобы срабатывание устройства 14 приведения в действие педали вызывало поворот педали 12” вокруг оси T поворота. И, напротив, в случае испытания рулевой системы воздушного судна точку приложения усилия к педали 12” выбирают таким образом, чтобы срабатывание устройства 14 приведения в действие педали вызывало поступательное перемещение педали 12” в направлении переднего конца воздушного судна.
Для приведения в действие педали 12” воздушного судна электродвигатель 16 устройства 14 приведения в действие педали вращается таким образом, чтобы уменьшить длину червяка червячной передачи 20 и тем самым вызвать поворот рычага 18 передачи усилия в направлении вперед, т.е. в направлении педали 12” воздушного судна. В результате поворотного движения рычага 18 передачи усилия движущая сила электродвигателя 16 передается на тягу 24 приложения усилия и, следовательно, на педаль 12” воздушного судна. Работой электродвигателя 16 управляет блок 32 управления в соответствии с предварительно установленными контролируемыми параметрами, которые образуют основу компьютерной программы, выполняющейся в блоке 32 управления.
После приведения в действие педали 12” воздушного судна усилие воздействия, приложенное к педали 12” электродвигателем 16 посредством червячной передачи 20, рычага 18 передачи усилия и тяги 24 приложения усилия, измеряется датчиком 26 усилия. Датчик 26 усилия подает сигналы, соответствующие усилию воздействия, приложенному к педали 12”, на блок 32 управления, при этом сигналы, поступающие от датчика 26 усилия на блок 32 управления, усиливаются устройством 34 усиления сигналов и регулирования электропитания.
В случае испытания педали тормоза воздушного судна блок 32 управления принимает сигналы также от устройства 28 измерения отклонения педали, которые соответствуют отклонению или углу поворота рычага 18 передачи усилия и, следовательно, угловому отклонению педали 12” воздушного судна после приложения усилия воздействия к педали 12” воздушного судна. При проведении испытания педали руля воздушного судна блок 32 управления принимает сигналы от устройства 30 измерения отклонения руля, которые соответствуют угловому отклонению руля 13 воздушного судна после приложения усилия воздействия к педали 12” воздушного судна.
Блок 32 управления обрабатывает сигналы, поступающие от датчика 26 усилия, а также от устройства 28 измерения отклонения педали и устройства 30 измерения отклонения руля, соответственно, и генерирует выходные сигналы, показывающие угловое отклонение педали 12” и руля 13 воздушного судна, соответственно, в зависимости от усилия воздействия, приложенного к педали 12” воздушного судна. Как наглядно показано на чертеже, связь между усилием воздействия, приложенным к педали 12” воздушного судна, и угловым отклонением педали 12” или руля 13 воздушного судна, соответственно, выводится блоком 32 управления в виде диаграммы, показывающей график зависимости углового отклонения педали 12” и руля 13 воздушного судна, соответственно, от усилия воздействия, приложенного к педали 12” воздушного судна. Эта диаграмма отображается на дисплее 38 блока 32 управления и выводится на печать при помощи принтера, который подключен к блоку 32 управления и управляется этим блоком.
Кроме того, блок 32 управления сравнивает измеренные минимальные и максимальные значения углового отклонения, измеренные минимальные или максимальные значения усилия воздействия, измеренные величины сцепления и измеренные величины симметрии с соответствующими номинальными значениями. Блок 32 управления подает предупредительный сигнал в виде сообщения определенного цвета на дисплее 38 блока 32 управления, если разность между измеренным значением и номинальным значением превышает предварительно установленный предел.
В заключение данные, полученные блоком 32 при проведении испытания, а также результаты вышеуказанного сравнения значений углового отклонения педали 12” и руля 13 воздушного судна, соответственно, при двух предварительно установленных значениях усилия воздействия с соответствующими номинальными значениями углового отклонения при двух предварительно установленных значениях усилия воздействия сохраняются в запоминающем устройстве сервера 40 базы данных.
Изобретение относится к способу испытания педальной системы воздушного судна и к устройству для его осуществления. Техническим результатом является повышение надежности и оперативности при проверке правильности функционирования педальной системы воздушного судна. Устройство для испытания педальной системы воздушного судна содержит устройство приведения в действие педали, предназначенное для воздействия на педаль воздушного судна, датчик усилия, предназначенный для измерения усилия воздействия, приложенного к педали воздушного судна при воздействии на педаль воздушного судна, а также для подачи сигнала, соответствующего усилию воздействия, устройство измерения отклонения, предназначенное для измерения углового отклонения компонента, который отклоняется в ответ на воздействие на педаль воздушного судна, и блок управления, предназначенный для обработки сигналов датчика усилия и устройств измерения отклонения с целью генерирования выходных сигналов, показывающих угловое отклонение компонентов, которые отклоняются в ответ на воздействие на педаль воздушного судна в зависимости от усилия воздействия, приложенного к педали воздушного судна. 2 н. и 13 з.п. ф-лы, 1 ил.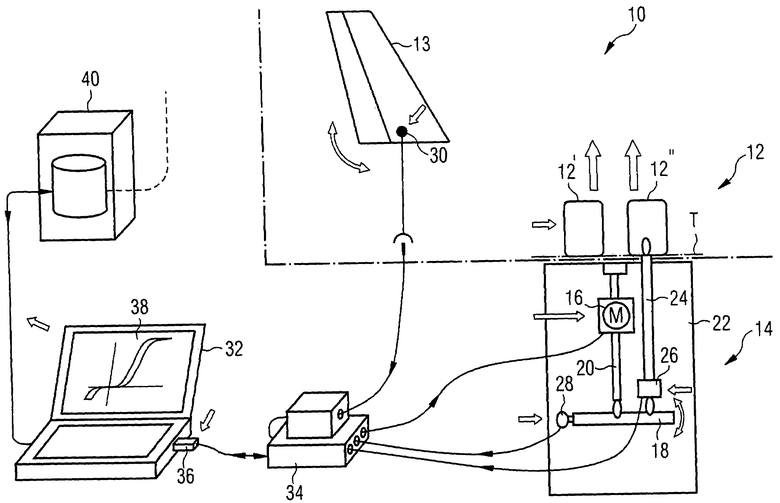
1. Устройство (10) для испытания педальной системы (12) воздушного судна, содержащее:
- устройство (14) приведения в действие педали, предназначенное для воздействия на педаль (12', 12") воздушного судна,
- датчик (26) усилия, предназначенный для измерения усилия воздействия, приложенного к педали (12', 12") воздушного судна при воздействии на педаль (12', 12") воздушного судна, а также для подачи сигнала, соответствующего усилию воздействия,
- первое устройство (28) измерения отклонения, предназначенное для измерения углового отклонения компонента (12', 12") тормозной системы воздушного судна, который отклоняется в ответ на воздействие на педаль (12', 12") воздушного судна,
- второе устройство (30) измерения отклонения, предназначенное для измерения углового отклонения компонента рулевой системы воздушного судна, который отклоняется в ответ на воздействие на педаль (12', 12") воздушного судна, и
- блок (32) управления, выполненный с возможностью обработки сигналов датчика (26) усилия и устройств (28, 30) измерения отклонения с целью генерирования выходных сигналов, показывающих угловое отклонение компонентов (12', 12", 13) тормозной системы воздушного судна и рулевой системы воздушного судна, которые отклоняются в ответ на воздействие на педаль (12', 12") воздушного судна, в зависимости от усилия воздействия, приложенного к педали (12', 12") воздушного судна.
2. Устройство по п.1, отличающееся тем, что устройство (14) приведения в действие педали содержит электродвигатель (16), предназначенный для приведения в действие рычага (18) передачи усилия, который соединен с тягой (24) приложения усилия, для приложения усилия воздействия к педали (12', 12") воздушного судна.
3. Устройство по п.2, отличающееся тем, что датчик (26) усилия, предназначенный для измерения усилия воздействия, приложенного к педали (12', 12") воздушного судна при воздействии на педаль (12', 12") воздушного судна, соединен с тягой (24) приложения усилия.
4. Устройство по п.1, отличающееся тем, что первое устройство (28) измерения отклонения представляет собой устройство, предназначенное для измерения углового отклонения педали (12', 12") воздушного судна в ответ на воздействие на педаль (12', 12") воздушного судна, при этом второе устройство (30) измерения отклонения представляет собой устройство, предназначенное для измерения углового отклонения руля (13) воздушного судна в ответ на воздействие на педаль (12', 12") воздушного судна.
5. Устройство по п.1, отличающееся тем, что оно содержит устройство (34) усиления сигналов и регулирования электропитания, выполненное с возможностью усиления сигналов, которыми обмениваются блок (32) управления и датчик (26) усилия, и с возможностью регулирования электропитания компонентов (16, 26, 28) устройства (14) приведения в действие педали.
6. Устройство по п.5, отличающееся тем, что оно содержит аналого-цифровой преобразователь (36), предназначенный для преобразования сигналов, которыми обмениваются (32) блок управления и устройство (34) усиления сигналов и регулирования электропитания.
7. Устройство по п.1, отличающееся тем, что блок (32) управления соединен с сервером (40) базы данных и/или выполнен с возможностью сравнения измеренного минимального и/или максимального значения углового отклонения, измеренного минимального и/или максимального значения усилия воздействия, и/или измеренной величины сцепления, и/или измеренной величины симметрии с соответствующими номинальными значениями и с возможностью подачи предупредительного сигнала, если разность между измеренным значением и номинальным значением превышает предварительно установленный предел.
8. Способ испытания педальной системы (12) воздушного судна, включающий этапы, на которых:
- воздействуют на педаль (12', 12") воздушного судна при помощи устройства (14) приведения в действие педали,
- измеряют усилие воздействия, приложенное к педали (12', 12") воздушного судна при воздействии на педаль (12', 12") воздушного судна, и обеспечивают подачу сигнала, соответствующего усилию воздействия, при помощи датчика (26) усилия,
- измеряют угловое отклонение компонента (12', 12") тормозной системы воздушного судна, который отклоняется в ответ на воздействие на педаль (12', 12") воздушного судна, при помощи первого устройства (28) измерения отклонения,
- измеряют угловое отклонение компонента (13) рулевой системы воздушного судна, который отклоняется в ответ на воздействие на педаль (12', 12") воздушного судна, при помощи второго устройства (30) измерения отклонения и
- обрабатывают сигналы датчика (26) усилия и устройств (28, 30) измерения отклонения при помощи блока (32) управления с целью генерирования выходных сигналов, показывающих угловое отклонение компонентов (12', 12", 13) тормозной системы воздушного судна и рулевой системы воздушного судна, которые отклоняются в ответ на воздействие на педаль (12', 12") воздушного судна, в зависимости от усилия воздействия, приложенного к педали (12', 12") воздушного судна.
9. Способ по п.8, отличающийся тем, что включает этап, на котором при помощи электродвигателя приводят в действие рычаг (18) передачи усилия, соединенный с тягой (24) приложения усилия, для приложения усилия воздействия к педали (12', 12") воздушного судна.
10. Способ по п.9, отличающийся тем, что включает этап, на котором измеряют усилие воздействия, приложенное к педали (12', 12") воздушного судна при воздействии на педаль (12', 12") воздушного судна, при помощи датчика (26) усилия, соединенного с тягой (24) приложения усилия.
11. Способ по п.8, отличающийся тем, что при помощи первого устройства (28) измерения отклонения измеряют угловое отклонение педали (12', 12") воздушного судна в ответ на воздействие на педаль (12', 12") воздушного судна, а при помощи второго устройства (30) измерения отклонения измеряют угловое отклонение руля (13) воздушного судна в ответ на воздействие на педаль (12', 12") воздушного судна.
12. Способ по п.8, отличающийся тем, что включает операции, на которых:
- усиливают сигналы, которыми обмениваются блок (32) контроля и датчик (26) усилия, и/или
- регулируют электропитание компонентов (16, 26, 28) устройства (14) приведения в действие педали.
13. Способ по п.12, отличающийся тем, что включает этап, на котором преобразуют сигналы, которыми обмениваются блок (32) управления и устройство (34) усиления сигналов и регулирования электропитания, при помощи аналого-цифрового преобразователя (36).
14. Способ по п.8, отличающийся тем, что включает этап, на котором сохраняют данные, полученные в ходе испытания педальной системы (12), в запоминающем устройстве сервера (40) базы данных, соединенного с блоком (32) управления.
15. Способ по п.8, отличающийся тем, что включает этапы, на которых:
- сравнивают измеренное минимальное и/или максимальное значение углового отклонения, измеренное минимальное и/или максимальное значение усилия воздействия, и/или измеренную величину сцепления, и/или измеренную величину симметрии с соответствующими номинальными значениями и
- обеспечивают подачу предупредительного сигнала, если разность между измеренным значением и номинальным значением превышает предварительно установленный предел.
| АКТИВНАЯ ЧАСТЬ ТРАНСФОРМАТОРА | 2000 |
|
RU2192681C2 |
| US 5023791, 11.06.1991 | |||
| УСТРОЙСТВО ВИЗУАЛЬНОГО ОТОБРАЖЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2281865C2 |

