ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящая заявка относится к системам управления для транспортных средств во время условий ленивого и остановленного транспортного потока.
УРОВЕНЬ ТЕХНИКИ
Некоторые транспортные средства могут быть оборудованы установленными на руле элементами управления. Как правило, такие элементы управления включают в себя кнопки автоматического поддержания скорости движения, которые могут давать водителю возможность устанавливать скорость транспортного средства во время условий крейсерского хода и корректировать скорость транспортного средства во время крейсерского хода. Дополнительно, такие элементы управления могут включать в себя кнопки для взаимодействия с аудиосистемой или информационно-развлекательной системой.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Транспортное средство включает в себя узел рулевого колеса, включающий в себя интерфейс и контроллер. Контроллер, в ответ на скорость транспортного средства, падающую ниже порогового значения, активирует интерфейс. Контроллер, к тому же, в ответ на первый водительский ввод через интерфейс, в то время как он активирован, применяет ограничение скорости движения транспортного средства на основании первого диапазона полномочий, связанных с первым водительским вводом, и приводит в действие силовую передачу для повышения скорости.
Транспортное средство может дополнительно содержать тормозной узел на связи с контроллером, при этом, контроллер дополнительно запрограммирован, в ответ на второй водительский ввод через интерфейс, в то время как он активирован, приводить в действие тормозной узел для снижения скорости, обусловленной вторым диапазоном полномочий.
Контроллер может быть дополнительно запрограммирован, в ответ на скорость, превышающую пороговое значение, деактивировать интерфейс.
Контроллер может быть дополнительно запрограммирован выводить для отображения первый индикатор, указывающий первый диапазон полномочий, и второй индикатор, указывающий второй диапазон полномочий.
Контроллер может быть дополнительно запрограммирован, в ответ на приведение в действие по меньшей мере одной из: педали акселератора и тормозной педали, деактивировать интерфейс и снимать ограничение скорости движения транспортного средства.
Интерфейс может включать в себя первую интерфейсную часть, расположенную на рулевом колесе, разнесенную радиально от второй интерфейсной части, расположенной на рулевом колесе.
Первая интерфейсная часть может быть выполнена с возможностью принимать первый водительский ввод, а вторая интерфейсная часть выполнена с возможностью принимать второй водительский ввод.
Первый диапазон полномочий может быть основан на скорости транспортного средства на холостом ходу и ограничении скорости транспортного средства.
Транспортное средство включает в себя датчик приближения, выполненный с возможностью выдавать сигнал, указывающий присутствие другого транспортного средства рядом с транспортным средством, контроллер и первую интерфейсную часть, расположенную на участке захвата рулевого колеса. В ответ на ввод через первую интерфейсную часть, в то время как другое транспортное средство находится рядом с транспортным средством, и скорость транспортного средства является меньшей, чем пороговое значение, первая интерфейсная часть выдает сигнал, указывающий скорректированное положение педали акселератора, в контроллер, а контроллер приводит в действие силовую передачу, так чтобы скорость повышалась.
Транспортное средство дополнительно может содержать вторую интерфейсную часть, расположенную на участке захвата рулевого колеса, разнесенную от первой интерфейсной части, при этом, в ответ на ввод через вторую интерфейсную часть, в то время как другое транспортное средство находится рядом с транспортным средством, и скорость является меньшей, чем пороговое значение, вторая интерфейсная часть выдает сигнал, указывающий скорректированное положение тормозной педали, в контроллер, а контроллер дополнительно запрограммирован приводить в действие тормозной узел, так чтобы скорость снижалась.
Транспортное средство дополнительно может содержать вторую интерфейсную часть, расположенную на участке захвата рулевого колеса, разнесенную от первой интерфейсной части, при этом, в ответ на ввод через вторую интерфейсную часть, вторая интерфейсная часть выдает сигнал, указывающий скорректированное положение педали акселератора, в контроллер, а контроллер дополнительно запрограммирован приводить в действие силовую передачу, так чтобы скорость снижалась.
В ответ на приведение в действие по меньшей мере одной из: педали акселератора и тормозной педали, контроллер может быть дополнительно запрограммирован деактивировать первую интерфейсную часть и вторую интерфейсную часть.
В одном варианте осуществления изобретения, в ответ на нажатие для ввода, приложенное к первой интерфейсной части, большее, чем пороговое нажатие для ввода, первая интерфейсная часть выдает сигнал, указывающий скорректированное положение педали акселератора в соответствии с диапазоном полномочий первой интерфейсной части.
В другом варианте осуществления изобретения, в ответ на нажатие для ввода, приложенное ко второй интерфейсной части, большее, чем пороговое нажатие для ввода, контроллер дополнительно запрограммирован выдавать сигнал, указывающий скорректированное положение тормозной педали в соответствии с по меньшей мере диапазоном полномочий первой интерфейсной части.
Транспортное средство может дополнительно содержать датчик приближения, выполненный с возможностью выдавать сигнал, указывающий присутствие другого транспортного средства рядом с транспортным средством.
Способ управления транспортным средством в условиях транспортной пробки включает в себя, в ответ на нахождение другого транспортного средства в пределах предопределенного расстояния от транспортного средства, и скорость транспортного средства, являющуюся меньшей, чем пороговое значение, вход в режим транспортного потока, который определяет ограничение скорости движения и темп повышения скорости. Способ также включает в себя, в ответ на ввод на первой интерфейсной части, находясь в режиме транспортного потока, повышают скорость с темпом вплоть до ограничения скорости движения.
Способ может дополнительно содержать этап, на котором в ответ на ввод на второй интерфейсной части, находясь в режиме транспортного потока, снижают скорость со вторым темпом, определенным режимом транспортного потока.
Снижение скорости со вторым темпом может включать в себя введение в действие тормозного узла.
Снижение скорости со вторым темпом может включать в себя снижение крутящего момента на выходном валу силовой передачи.
Способ может дополнительно содержать этап, на котором в ответ на отсутствие другого транспортного средства в пределах предопределенного расстояния или скорость транспортного средства, являющуюся большей, чем пороговое значение, выходят из режима транспортного потока, деактивируют первую интерфейсную часть и вторую интерфейсную часть и снимают ограничение скорости движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - примерное транспортное средство.
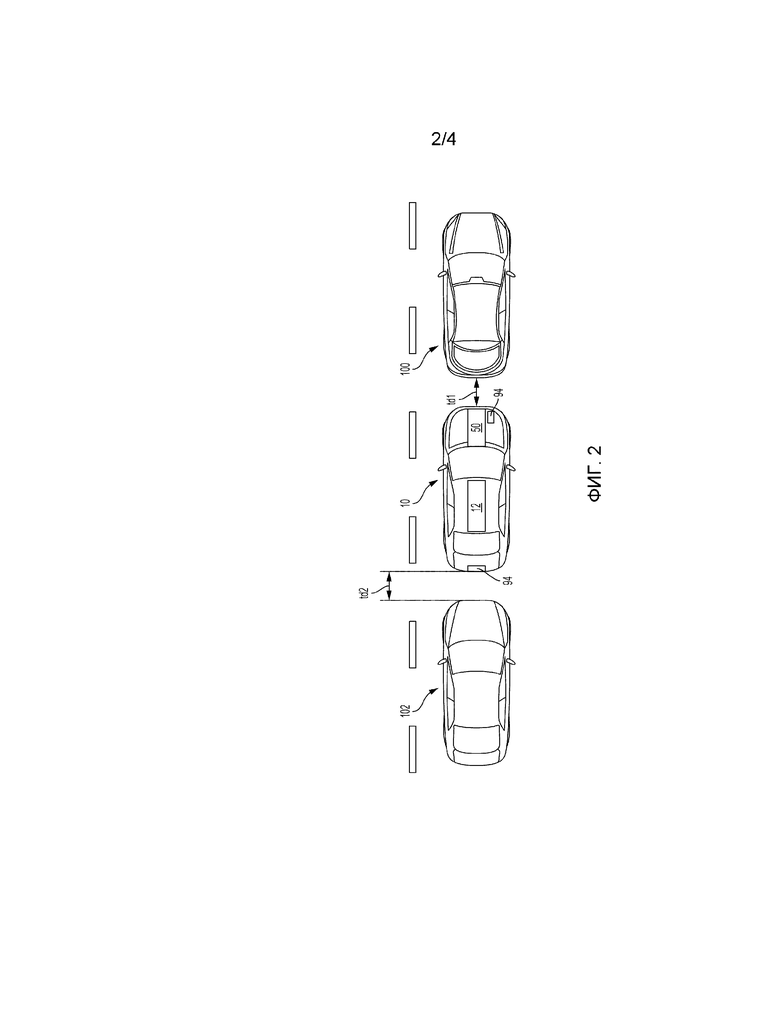
Фиг.2 - вид сверху транспортного средства в условиях транспортной пробки.
Фиг.3 - местный вид узла рулевого колеса и пользовательского интерфейса.
Фиг.4 - примерный способ управления транспортным средством.
ПОДРОБНОЕ ОПИСАНИЕ
Как требуется, в материалах настоящей заявки раскрыты детализированные варианты осуществления настоящего изобретения; однако, должно быть понятно, что раскрытые варианты осуществления являются всего лишь примером изобретения, которое может быть воплощено в различных и альтернативных формах. Фигуры не обязательно должны определять масштаб; некоторые признаки могут быть преувеличены или преуменьшены, чтобы показывать детали конкретных компонентов. Поэтому, конкретные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, должны интерпретироваться не в качестве ограничивающих, а только качестве представляющих основу для обучения специалиста в данной области техники по-разному применять настоящее изобретение.
Со ссылкой на фиг.1, показано примерное транспортное средство. Транспортное средство 10 может иметь любой пригодный тип, такой как грузовой автомобиль, автобус, сельскохозяйственная техника, военный транспорт или оборудование для погрузки грузов. Транспортное средство 10 может включать в себя силовую передачу 12, узел 14 ведущего моста и узел 16 рулевого колеса.
Силовая передача 12 может выдавать мощность или крутящий момент в узел 14 ведущего моста для приведения в движение транспортного средства 10. Силовая передача 12 может включать в себя двигатель 20, оперативно присоединенный к трансмиссии 22 входным валом 24.
Двигатель 20 может быть выполнен в виде двигателя внутреннего сгорания, который может быть приспособлен действовать с использованием любого пригодного типа топлива, такого как бензин, дизельное топливо, этиловый спирт, водород, и т. д. Двигатель 20 может выдавать мощность или движущий крутящий момент в трансмиссию 22.
Трансмиссия 22 может быть оперативно присоединена к двигателю 20 входным валом 24. Трансмиссия 22 может быть оперативно присоединена к узлу 14 ведущего моста выходным валом 26.
Трансмиссия 22 может иметь любой пригодный тип, такой как автоматическая или ручная трансмиссия с многочисленными передачами или ступенчатым передаточным отношением. Трансмиссия 22 может включать в себя гидротрансформатор 30 и коробку 32 передач.
Гидротрансформатор 30 может быть расположен между двигателем 20 и коробкой 28 передач. Гидротрансформатор 30 может обеспечивать гидравлическую связь между двигателем 20 и коробкой 32 передач. Гидротрансформатор 30 также может обеспечивать крутильную изоляцию для привода на ведущие колеса, так чтобы привод на ведущие колеса мог быть изолирован от возмущений или пульсаций.
Коробка 32 передач может включать в себя многочисленные устройства зубчатой передачи или фрикционные элементы, выполненные с возможностью предусматривать множество передаточных отношений. Множество передаточных отношений может избирательно менять крутящий момент на выходном валу трансмиссии 22 на основании состояния трансмиссии.
В по меньшей мере одном варианте осуществления, трансмиссия 22 может включать в себя систему 34 электропривода. Система 34 электропривода может включать в себя фрикционный элемент, такой как муфта расцепления, и электрическую машину, такую как электродвигатель-генератор, и связанную тяговую аккумуляторную батарею. Система 34 электропривода может быть избирательно присоединена к двигателю 20 через фрикционный элемент. По меньшей мере один из двигателя 20 и системы 34 электропривода может выдавать крутящий момент или мощность в узел 14 ведущего моста через выходной вал 26 для приведения в движение транспортного средства 10.
Узел 14 ведущего моста может с возможностью вращения поддерживать колесный узел с помощью ведущего моста 40. Выходной вал 26 может быть присоединен к входу дифференциала 42. Крутящий момент, приложенный к выходному валу 26, может передаваться через дифференциал 42 и на ведущий мост 40, чтобы вращать колесный узел.
Транспортное средство 10 может включать в себя контроллер 50. Контроллер 50 может быть выполнен с возможностью планировать события переключения трансмиссии, выводить положение передачи трансмиссии, менять крутящий момент на выходном валу силовой передачи или распределять мощность между компонентами силовой передачи, если транспортное средство 10 оборудовано таким образом. Контроллер 50 может управлять различными фрикционными элементами или исполнительными механизмами трансмиссии 22, такими как муфты и/или тормоза, чтобы избирательно передавать мощность с двигателя 20 на колесный узел согласно различным передаточным отношениями трансмиссии.
Контроллер 50 может быть выполнен с возможностью интерпретировать входные сигналы, выдаваемые педалью 60 акселератора и тормозной педалью 62. Педаль 60 акселератора может выдавать сигнал, указывающий положение педали акселератора, в контроллер 50. Контроллер 50 может быть оснащен многомерной регулировочной характеристикой педали акселератора, которая может связывать положение педали акселератора с крутящим моментом на выходном валу силовой передачи. Контроллер 50 может менять крутящий момент на выходном валу силовой передачи в ответ на изменения положения педали акселератора. Например, уменьшение положения педали акселератора может соответствовать запросу на пониженный крутящий момент на выходном валу силовой передачи, и силовая передача 12 может приводиться в действие, так чтобы скорость транспортного средства снижалась. Увеличение положения педали акселератора может соответствовать запросу на повышенный крутящий момент на выходном валу силовой передачи, и силовая передача 12 может приводиться в действие, так чтобы скорость транспортного средства повышалась.
Тормозная педаль 62 может выдавать сигнал, указывающий положение тормозной педали, в контроллер 50. Контроллер 50 может быть на связи с тормозным узлом 70. В ответ на приведение в действие тормозной педали 62, контроллер 50 может приводить в действие фрикционный тормоз тормозного узла 70, чтобы замедлять или сдерживать вращение по меньшей мере одного колеса, связанного с транспортным средством 10, для снижения скорости транспортного средства. Тормозной узел 70 может быть выполнен в виде тормозного барабана или дискового тормоза. Тормозной узел 70 может включать в себя модуль 72 ABS (антиблокировочной тормозной системы). Модуль 72 ABS может управлять или менять тормозное усилие, приложенное тормозным узлом 70, на основании положения тормозной педали. В по меньшей мере одном варианте осуществления, модуль 72 ABS может быть выполнен с возможностью контролировать скорость транспортного средства. В по меньшей мере одном варианте осуществления, автономный датчик 74 скорости вращения колеса может быть расположен ближе к колесу и выдавать сигнал, указывающий скорость вращения колеса, в контроллер 50.
Узел 16 рулевого колеса может быть выполнен с возможностью выдавать ввод в систему рулевого управления для изменения направления колес колесного узла. Узел 16 рулевого колеса может включать в себя рулевое колесо 80 в поворотном соединении с узлом колес через рулевой привод. Рулевой привод может шарнирно сочленять или поворачивать колесный узел на основании углового положения рулевого колеса.
Транспортные пробки и транспортный поток бампер в бампер весьма распространены в больших городах. Водитель транспортного средства 10 может повторно приводить в действие педаль 60 акселератора, а впоследствии, тормозную педаль 62, для того чтобы поддерживать расстояние между транспортным средством перед транспортным средством 10, в то время как транспортный поток медленно движется. Повторное приведение в действие педали 60 акселератора и тормозной педали 62 может приводить к утомлению водителя. Эргономическая выгода для водителя транспортного средства 10 может быть обеспечена парой элементов управления силовой передачей, расположенных рядом с участком 82 захвата рулевого колеса 80.
Элементы управления силовой передачей могут быть предусмотрены в качестве части интерфейса 84. Интерфейс 84 может быть расположен на или ближе к первой поверхности 86 рулевого колеса 80 рядом с участком 82 захвата. Первая поверхность 86 рулевого колеса 80 может быть обращена в направлении водителя транспортного средства 10. В по меньшей мере одном варианте осуществления, интерфейс 84 может быть расположен на или ближе к второй поверхности 88 рулевого колеса 80. Вторая поверхность 88 может быть расположена по другую сторону от первой поверхности 86 и обращена от водителя транспортного средства 10. В дополнительном варианте осуществления, интерфейс может быть расположен на или ближе к центру рулевого колеса или ступице 90 рулевого колеса.
Интерфейс 84 может давать водителю транспортного средства 10 возможность приводить в действие силовую передачу 12 и тормозной узел 70 вместо педали 60 акселератора и тормозной педали 62 соответственно. Интерфейс 84 может включать в себя кнопку, чувствительный к нажатию переключатель, сенсорную поверхность, интеллектуальную поверхность, или тому подобное, задействованные, в то время, как транспортное средство 10 работает в условиях транспортной пробки.
Контроллер 50 может быть выполнен с возможностью выявлять условия, указывающие транспортное средство 10, действующее в условиях транспортной пробки, на основании состояния трансмиссии, расстояния между транспортным средством 10 и транспортным средством, ближайшим к транспортному средству 10, и скорости транспортного средства. Трансмиссия 22 может выдавать сигнал, указывающий состояние трансмиссии, например, состояние привода и текущее передаточное отношение или нейтральное состояние, в контроллер 50. Датчик 94 приближения может выдавать сигнал, указывающий расстояние между транспортным средством 10 и транспортным средством, ближайшим к транспортному средству 10, в контроллер 50. По меньшей мере один из модуля 72 ABS и датчика 74 скорости вращения колеса может выдавать сигнал, указывающий скорость транспортного средства, в контроллер 50. Контроллер 50 может управлять транспортным средством 10 в режиме транспортного потока в ответ на нахождение трансмиссии 22 в состоянии привода, расстояние между транспортным средством 10 и транспортным средством, ближайшим к транспортному средству 10, находящееся в пределах предопределенного расстояния, и скорость транспортного средства, являющуюся меньшей, чем пороговое значение.
В по меньшей мере одном варианте осуществления, контроллер 50 может быть выполнен с возможностью определять условия транспортной пробки на основании предопределенного количества нажатий тормозной педали 62 в течение предопределенного периода времени и расстояния между транспортным средством 10 и транспортным средством, ближайшим к транспортному средству 10, и скорости транспортного средства.
Со ссылкой на фиг.2, показан вид сверху транспортного средства 10 в примерных условиях транспортной пробки. По меньшей мере один датчик 94 приближения может быть расположен в пределах передней части транспортного средства 10. Датчик 94 приближения может быть выполнен с возможностью выдавать сигнал, указывающий присутствие по меньшей мере одного транспортного средства рядом с транспортным средством 10. Датчик 94 приближения может быть смотрящей вперед камерой, радиолокатором, ультразвуковым датчиком, или тому подобным, выполненным с возможностью выдавать сигнал, указывающий расстояние, td1, между передней частью транспортного средства 10 и первым транспортным средством 100. По меньшей мере один датчик 94 приближения может быть расположен в пределах задней части транспортного средства 10. Датчик 94 приближения может быть смотрящей назад камерой, радиолокатором, ультразвуковым датчиком, или тому подобным, выполненным с возможностью выдавать сигнал, указывающий расстояние, td2, между задней частью транспортного средства 10 и вторым транспортным средством 102. Контроллер 50 может активировать интерфейс 84, чтобы принимать водительский ввод в ответ на по меньшей мере одно из первого транспортного средства 100 в пределах расстояния, td1, и второго транспортного средства 102 в пределах расстояния, td2, в то время как скорость транспортного средства является меньшей, чем пороговое значение.
Со ссылкой на фиг.3, показан местный вид узла 16 рулевого колеса и пользовательского интерфейса 110. Индикатор 112, указывающий эксплуатацию транспортного средства 10 в режиме транспортного потока, может выводиться через пользовательский интерфейс 110 в ответ на выявление контроллером 50 условий транспортной пробки.
Первая интерфейсная часть 120 интерфейса 84 может быть расположена ближе к первой поверхности 86 рулевого колеса 80. В по меньшей мере одном варианте осуществления, первая интерфейсная часть 120’ может быть расположена ближе к ступице 90 рулевого колеса. Первая интерфейсная часть 120 или 120’ может быть расположена на той же самой стороне от водителя транспортного средства 10, что и педаль 60 акселератора. Первая интерфейсная часть 120 или 120’ может быть выполнена с возможностью принимать водительский ввод, который может давать водителю транспортного средства 10 возможность повышать или снижать скорость транспортного средства на калиброванную величину относительно скорости транспортного средства на холостом ходу. Скорость транспортного средства на холостом ходу может быть скоростью транспортного средства, в то время как водитель транспортного средства 10 не приводит в действие ни педаль 60 акселератора, ни тормозную педаль 62, и транспортное средство приводится в движение крутящим моментом холостого хода двигателя 20 или источника электропитания.
Первая интерфейсная часть 120 может быть наделена размерами, чтобы принимать большой палец водителя транспортного средства 10. Первая интерфейсная часть 120 может иметь в целом дуговидную форму, которая может приблизительно соответствовать кривизне рулевого колеса 80. Первая интерфейсная часть 120 может включать в себя область 122 или 122’ положительного приращения скорости транспортного средства и область 124 или 124’ отрицательного приращения скорости транспортного средства. Водительский ввод, примененный к области 122 положительного приращения скорости транспортного средства, может включать в себя сигнал, указывающий скорректированное положение педали акселератора, в контроллер 50, так чтобы силовая передача 12 приводилась в действие для повышения скорости транспортного средства на калиброванную величину. Скорректированное положение педали акселератора может указывать увеличение положения педали акселератора по сравнению с предыдущим положением педали акселератора. Водительский ввод, примененный к области 124 отрицательного приращения скорости транспортного средства, может включать в себя сигнал, указывающий скорректированное положение педали акселератора, в контроллер 50, так чтобы силовая передача 12 приводилась в действие для снижения скорости транспортного средства на калиброванную величину. Скорректированное положение педали акселератора может указывать уменьшение положения педали акселератора по сравнению с предыдущим положением педали акселератора.
Повышение или снижение скорости транспортного средства, которое может происходить в ответ на приведение в действие области 122 положительного приращения скорости транспортного средства или области 124 отрицательного приращения скорости транспортного средства, может калиброваться на основании длительности применения водительского ввода или величины приложенного нажатия. Например, короткая длительность нажатия на область 122 положительного приращения скорости транспортного средства может повышать скорость транспортного средства на первую калиброванную величину сверх скорости транспортного средства на холостом ходу. Большая длительность нажатия на область 122 положительного приращения скорости транспортного средства может повышать скорость транспортного средства на вторую калиброванную величину сверх скорости транспортного средства на холостом ходу, где вторая калиброванная величина является большей, чем первая калиброванная величина. Первое нажатие для ввода, приложенное к области 122 положительного приращения скорости транспортного средства может повышать скорость транспортного средства на первую калиброванную величину сверх скорости транспортного средства на холостом ходу. Второе нажатие для ввода, приложенное к области 122 положительного приращения скорости транспортного средства, большее, чем первое нажатие для ввода или пороговое нажатие для ввода, может повышать скорость транспортного средства на вторую калиброванную величину выше скорости транспортного средства на холостом ходу.
Короткая длительность нажатия на область 124 отрицательного приращения скорости транспортного средства может снижать скорость транспортного средства на первую калиброванную величину. Большая длительность нажатия на область 124 отрицательного приращения скорости транспортного средства может снижать скорость транспортного средства на вторую калиброванную величину, где вторая калиброванная величина является большей, чем первая калиброванная величина. Первое нажатие для ввода, приложенное к области 124 отрицательного приращения скорости транспортного средства может снижать скорость транспортного средства на первую калиброванную величину. Второе нажатие для ввода, приложенное к области 124 отрицательного приращения скорости транспортного средства, большее, чем первое нажатие для ввода или пороговое нажатие для ввода, может снижать скорость транспортного средства на вторую калиброванную величину, при этом, вторая калиброванная величина является большей, чем первая калиброванная величина.
Повышение или снижение скорости транспортного средства в результате вводов, принятых через область 122 положительного приращения скорости или область 124 отрицательного приращения скорости транспортного средства первой интерфейсной части 120, могут быть обусловлены первым диапазоном полномочий 126. Первый диапазон полномочий 126 может выводиться на устройство отображения через пользовательский интерфейс 110. Первый диапазон полномочий 126 может выдавать дискретные калиброванные величины, на которые может быть повышена скорость транспортного средства относительно скорости транспортного средства на холостом ходу. Первый диапазон полномочий 126 может быть основан на скорости транспортного средства на холостом ходу и максимальной скорости транспортного средства сверх скорости транспортного средства на холостом ходу. Контроллер 50 может быть запрограммирован деактивировать интерфейс 84 в ответ на скорость транспортного средства, являющуюся большей, чем максимальная скорость транспортного средства сверх скорости транспортного средства на холостом ходу. Пользовательский интерфейс 110 может выдавать индикатор 128 скорости, указывающий скорость транспортного средства относительно первого диапазона полномочий 126 первой интерфейсной части 120 интерфейса 84.
Вторая интерфейсная часть 130 интерфейса 84 может быть расположена ближе к первой поверхности 86 рулевого колеса 80. Вторая интерфейсная часть 130 может быть радиально разнесена с первой интерфейсной частью 120. В по меньшей мере одном варианте осуществления, вторая интерфейсная часть 130’ может быть расположена ближе к ступице 90 рулевого колеса. Вторая интерфейсная часть 130 или 130’ может быть расположена на той же самой стороне от водителя транспортного средства 10, что и тормозная педаль 62. Вторая интерфейсная часть 130 или 130’ может быть выполнена с возможностью принимать водительский ввод, который может давать водителю транспортного средства 10 возможность снижать скорость транспортного средства на калиброванную величину относительно скорости транспортного средства на холостом ходу.
Вторая интерфейсная часть 130 может быть наделена размерами, чтобы принимать большой палец водителя транспортного средства 10. Вторая интерфейсная часть 130 может иметь в целом дуговидную форму, которая может приблизительно соответствовать кривизне рулевого колеса 80. Вторая интерфейсная часть 130 может включать в себя первую область 132 или 132’ применения тормозов и вторую область 134 или 134’ применения тормозов. Водительский ввод, примененный к первой области 132 применения тормозов, может включать в себя сигнал, указывающий скорректированное положение тормозной педали, в контроллер 50, так чтобы тормозной узел 70 приводился в действие для снижения скорости транспортного средства на первую калиброванную величину. Скорректированное положение тормозной педали может указывать увеличение положения тормозной педали по сравнению с предыдущим положением тормозной педали или нажатие тормозной педали 62. Водительский ввод, примененный к второй области 134 применения тормозов, может включать в себя сигнал, указывающий скорректированное положение тормозной педали, в контроллер 50, так чтобы тормозной узел 70 приводился в действие для снижения скорости транспортного средства на вторую калиброванную величину. Сила применения тормозов, связанная со второй калиброванной величиной, может быть большей, чем сила применения тормозов, связанная с первой калиброванной величиной. В по меньшей мере одном варианте осуществления, водительский ввод, примененный к первой области 132 применения тормозов, может снижать скорость транспортного средства, чтобы приближалась к скорости транспортного средства на холостом ходу. Водительский ввод, примененный к второй области 134 применения тормозов, может снижать скорость транспортного средства ниже скорости транспортного средства на холостом ходу или приводить транспортное средство 10 к полной остановке в пределах предопределенного расстояния, td1, от первого транспортного средства 100.
Снижение скорости транспортного средства, которое может происходить в ответ на приведение в действие первой области 132 применения тормозов или второй области 134 применения тормозов, может калиброваться на основании длительности применения водительского ввода или величины приложенного нажатия. Например, короткая длительность нажатия на первую область 132 применения тормозов или вторую область 134 применения тормозов может снижать скорость транспортного средства на первую калиброванную величину. Большая длительность нажатия на первую область 132 применения тормозов или вторую область 134 применения тормозов может снижать скорость транспортного средства на вторую калиброванную величину, где вторая калиброванная величина является большей, чем первая калиброванная величина. Первое нажатие для ввода, приложенное к первой области 132 применения тормозов или второй области 134 применения тормозов, может снижать скорость транспортного средства на первую калиброванную величину. Второе нажатие для ввода, приложенное к первой области 132 применения тормозов или второй области 134 применения тормозов, большее, чем первое нажатие для ввода, может снижать скорость транспортного средства на вторую калиброванную величину, при этом, вторая калиброванная величина является большей, чем первая калиброванная величина.
Снижение скорости транспортного средства в результате вводов, принятых через первую область 132 применения тормозов или вторую область 134 применения тормозов второй интерфейсной части 130, может быть обусловлено вторым диапазоном полномочий 136. Второй диапазон полномочий 136 может выводиться на устройство отображения через пользовательский интерфейс 110. Второй диапазон полномочий 136 может выдавать дискретные калиброванные величины, на которые может быть снижена скорость транспортного средства относительно скорости транспортного средства на холостом ходу. Второй диапазон полномочий 136 может соответствовать или перекрываться с первым диапазоном полномочий 126. Пользовательский интерфейс 110 может выдавать индикатор 138 тормоза, указывающий скорость транспортного средства относительно первого диапазона полномочий 136 второй интерфейсной части 130 интерфейса 84.
Педаль 60 акселератора и тормозная педаль 62 может отменять действие интерфейса 84, в то время как транспортное средство 10 работает в режиме транспортного потока. Контроллер 50, во время эксплуатации транспортного средства 10 в режиме транспортного потока, может быть запрограммирован деактивировать интерфейс 84 в ответ на приведение в действие по меньшей мере одной из педали 60 акселератора и тормозной педали 62. В по меньшей мере одном варианте осуществления, контроллер 50, во время эксплуатации транспортного средства 10 в режиме транспортного потока, может быть запрограммирован деактивировать интерфейс в ответ на скорость транспортного средства, большую чем пороговое значение. Скорость транспортного средства, большая, чем пороговое значение, может быть скоростью транспортного средства, большей, чем первый диапазон полномочий 126.
Со ссылкой на фиг.4, показан примерный способ управления транспортным средством. Способ может принимать скорость транспортного средства, сигнал, указывающий присутствие транспортного средства рядом с транспортным средством, и сигнал, указывающий состояние трансмиссии. На вершине 200 блок-схемы, способ может сравнивать текущую скорость транспортного средства с пороговой скоростью транспортного средства. Если скорость транспортного средства будет большей, чем пороговая скорость транспортного средства, способ может возобновлять цикл исполнения. Если скорость транспортного средства является меньшей, чем пороговая скорость транспортного средства, способ может продолжаться вершиной 202 блок-схемы.
На вершине 202 блок-схемы, способ может сравнивать измеренное расстояние между транспортным средством, ближайшим к транспортному средству 10, с предопределенным расстоянием. Если измеренное расстояние между транспортным средством, ближайшим к транспортному средству 10, будет большим, чем предопределенное расстояние, способ может возобновлять цикл исполнения. Если измеренное расстояние между транспортным средством, ближайшим к транспортному средству 10, находится в пределах или ближе предопределенного расстояния, способ может входить в режим транспортного потока. По входу в режим транспортного потока, на вершине 204 блок-схемы, способ может активировать интерфейс 84, расположенный на рулевом колесе 80.
На вершине 206 блок-схемы, способ может осуществлять контроль, чтобы выяснять, был ли принят водительский ввод на интерфейсе 84. Водитель транспортного средств 10 может быть способен предоставлять ввод на первой интерфейсной части 120, выполненной с возможностью выполнять функции педали 60 акселератора. Водитель транспортного средства 10 также может быть способен предоставлять ввод на второй интерфейсной части 130, выполненной с возможностью выполнять функции тормозной педали 62. Если водитель транспортного средства 10 не предоставляет ввод через интерфейс 84, способ может возобновлять цикл исполнения.
На вершине 206 блок-схемы, если водитель транспортного средства 10 предоставляет ввод через интерфейс 84, способ может продолжаться вершинами 208 или 212 блок-схемы в зависимости от того, какая интерфейсная часть принимала ввод. На вершине 208 блок-схемы, если ввод принят через первую интерфейсную часть 120, способ может продолжаться вершиной 210 блок-схемы, где силовая передача 12 может приводиться в действие для повышения скорости транспортного средства. Скорость транспортного средства может повышаться на предопределенную величину, обусловленную первым диапазоном полномочий 126. Скорость транспортного средства может повышаться посредством повышения крутящего момента на выходном валу силовой передачи.
На вершине 212 блок-схемы, если ввод принят через вторую интерфейсную часть 130, способ может продолжаться вершиной 214 блок-схемы. На вершине 214 блок-схемы, скорость транспортного средства может понижаться на предопределенную величину, обусловленную вторым диапазоном полномочий 136. Скорость транспортное средство может снижаться посредством приведения в действие тормозного узла 70 для нажатия фрикционного тормоза. Скорость транспортного средства также может снижаться посредством снижения крутящего момента на выходном валу силовой передачи.
На вершине 216 блок-схемы, способ, во время эксплуатации транспортного средства в режиме транспортного потока, может продолжать оценивать, удовлетворены ли по-прежнему основы активации: скорость транспортного средства, меньшая, чем пороговая скорость транспортного средства, и измеренное расстояние между транспортным средством, ближайшим к транспортному средству 10, находится в пределах или ближе к предопределенному расстоянию. Если скорость транспортного средства является большей, чем пороговая скорость транспортного средства, или измеренное расстояние между транспортным средством, ближайшим к транспортному средству 10, является меньшим, чем предопределенное расстояние, способ может продолжаться вершиной 218 блок-схемы. На вершине 218 блок-схемы, способ может выходить из режима транспортного потока и деактивировать первую интерфейсную часть 120 и вторую интерфейсную часть 130 интерфейса 84. В по меньшей мере одном варианте осуществления, способ может выводить для отображения индикатор, указывающий деактивацию интерфейса 84 и/или выход из режима транспортного потока.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы изобретения. Предпочтительнее, словесные формулировки, используемые в описании изобретения, являются скорее словесными формулировками описания, нежели ограничения, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема изобретения. Дополнительно, признаки различных вариантов осуществления реализации могут комбинироваться для формирования дополнительных вариантов осуществления изобретения.



Предложено транспортное средство. Транспортное средство содержит узел рулевого колеса, включающий в себя интерфейс, контроллер. Контроллер запрограммирован в ответ на скорость транспортного средства, падающую ниже порогового значения, активировать интерфейс. Контроллер запрограммирован в ответ на первый водительский ввод через интерфейс, в то время как он активирован, применять ограничение скорости движения транспортного средства на основании первого диапазона полномочий, связанных с первым водительским вводом, и приводить в действие силовой агрегат для повышения скорости. Достигается управление системами транспортного средства при движении в пробках. 7 з.п. ф-лы, 4 ил.
1. Транспортное средство, содержащее:
узел рулевого колеса, включающий в себя интерфейс; и
контроллер, запрограммированный,
в ответ на скорость транспортного средства, падающую ниже порогового значения, активировать интерфейс и,
в ответ на первый водительский ввод через интерфейс, в то время как он активирован, применять ограничение скорости движения транспортного средства на основании первого диапазона полномочий, связанных с первым водительским вводом, и приводить в действие силовой агрегат для повышения скорости.
2. Транспортное средство по п.1, дополнительно содержащее тормозной узел на связи с контроллером, при этом контроллер дополнительно запрограммирован, в ответ на второй водительский ввод через интерфейс, в то время как он активирован, приводить в действие тормозной узел для снижения скорости, обусловленной вторым диапазоном полномочий.
3. Транспортное средство по п.2, в котором контроллер дополнительно запрограммирован, в ответ на скорость, превышающую пороговое значение, деактивировать интерфейс.
4. Транспортное средство по п.2, в котором контроллер дополнительно запрограммирован выводить для отображения первый индикатор, указывающий первый диапазон полномочий, и второй индикатор, указывающий второй диапазон полномочий.
5. Транспортное средство по п.4, в котором первый диапазон полномочий основан на скорости транспортного средства на холостом ходу и ограничении скорости транспортного средства.
6. Транспортное средство по п.2, в котором контроллер дополнительно запрограммирован, в ответ на приведение в действие по меньшей мере одной из педали акселератора и тормозной педали, деактивировать интерфейс и снимать ограничение скорости движения транспортного средства.
7. Транспортное средство по п.2, в котором интерфейс включает в себя первую интерфейсную часть, расположенную на рулевом колесе, разнесенную радиально от второй интерфейсной части, расположенной на рулевом колесе.
8. Транспортное средство по п.7, в котором первая интерфейсная часть выполнена с возможностью принимать первый водительский ввод, а вторая интерфейсная часть выполнена с возможностью принимать второй водительский ввод.
| US 4077487 A1, 07.03.1978 | |||
| US 20040144195 A1, 29.07.2004 | |||
| US 7295904 B2, 13.11.2007. |

