Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к системам управления аэродинамическими поверхностями и тормозами летательных аппаратов (ЛА).
Уровень техники
Обычный ЛА с крылом неизменяемой геометрии имеет несколько поверхностей управления, в том числе руль направления, управление которыми осуществляется с помощью механических связей и тросовой проводки, которые соединяют задействуемые пилотом педали управления рулем направления с непосредственной поверхностью управления в хвостовой части фюзеляжа ЛА. Механические элементы и тросовая проводка, как правило, проходят по всей длине фюзеляжа ЛА под полом кабины экипажа. Доступ к данным соединительным элементам и тросовой проводке, их техобслуживание и даже сама установка в процессе производства могут быть затруднительными. Обычные тормозные системы самолетов имеют аналогичные недостатки. Предлагалось использование систем с электродистанционным управлением для систем управления полетом самолета и тормозных систем. Однако все равно существует необходимость создания надежной, высокоточной и при этом обладающей малыми габаритами электродистанционной системы управления рулем направления и/или тормозами ЛА.
Раскрытие изобретения
Задачей настоящего изобретения является создание напольной модульной системы управления тормозами и рулем направления, свободной от недостатков существующих систем и обеспечивающей другие преимущества. По меньшей мере одним вариантом осуществления настоящего изобретения является модульная система управления тормозами и рулем направления, предназначенная для применения на ЛА, в кабине экипажа которого имеется пол. Данный ЛА содержит тормозную систему с электродистанционным управлением и рулевую систему с электродистанционным управлением. Модульная система управления тормозами и рулем направления включает в себя корпус с противоположными боковыми стенками, устанавливаемый полностью на верхней поверхности пола кабины без прохождения сквозь пол при функциональном соединении данной модульной системы управления тормозами и рулем направления с тормозной и рулевой системами, имеющими электродистанционное управление. Смонтированные на корпусе электрические разъемы функционально соединены с тормозной и рулевой системами, имеющими электродистанционное управление. Два педальных узла соединены с корпусом и выступают в стороны от боковых стенок. Каждый педальный узел содержит ножную педаль, задействуемую пилотом или иным оператором, и каждый педальный узел при воздействии оператора может независимо поворачиваться относительно своей оси поворота. Каждый педальный узел может также перемещаться в продольном направлении относительно корпуса.
Модульная система управления тормозами и рулем направления содержит также систему управления тормозами, смонтированную полностью внутри корпуса и соединенную с педальными узлами. Система управления тормозами содержит первый датчик перемещения, функционально связанный с по меньшей мере первым из педальных узлов, а также с по меньшей мере первым из электрических разъемов, соединенным с тормозной системой, имеющей электродистанционное управление. Первый датчик перемещения служит для обнаружения вращательного движения педального узла и выдачи по первому электрическому разъему первого сигнала на тормозную систему с электродистанционным управлением для ее активации в соответствии с величиной и скоростью поворотного перемещения педального узла.
Модульная система управления тормозами и рулем направления содержит также систему управления рулем направления, смонтированную полностью внутри корпуса и функционально независимую от системы управления тормозами. Система управления рулем направления содержит второй датчик перемещения, функционально связанный с педальными узлами независимо от первого датчика и соединенный со вторым из электрических разъемов, соединенным с рулевой системой, имеющей электродистанционное управление. Второй датчик перемещений служит для обнаружения продольного перемещения педальных узлов и подачи по второму электрическому разъему второго сигнала на рулевую систему с электродистанционным управлением в зависимости от продольного перемещения педального узла относительно корпуса.
Модульная система управления тормозами и рулем направления содержит также систему регулировки положения, функционально независимую от системы управления тормозами и системы управления рулем направления. Система регулировки положения соединена с педальными узлами и служит для одновременного перемещения педальных узлов в одном и том же направлении для изменения их положения в продольном направлении относительно корпуса в диапазоне регулировки между передним и задним положениями.
Еще в одном варианте осуществления изобретения предлагается модульная система управления тормозами и рулем направления для применения на транспортном средстве, имеющем центр управления с полом и имеющем тормозную систему с электронным управлением и рулевую систему с электронным управлением. Указанная модульная система управления тормозами и рулем направления содержит корпус, устанавливаемый в центре управления полностью на верхней поверхности пола без прохождения сквозь пол при функциональном соединении данной модульной системы управления тормозами и рулем направления с тормозной и рулевой системами. Смонтированные на корпусе электрические разъемы функционально соединены с тормозной и рулевой системами. Два педальных узла выступают в стороны от корпуса, и каждый педальный узел задействуется оператором. Каждый педальный узел может независимо поворачиваться и перемещаться в продольном направлении относительно корпуса.
Модульная система управления тормозами и рулем направления содержит также систему управления тормозами, смонтированную полностью внутри корпуса и соединенную с педальными узлами. Система управления тормозами содержит первый датчик перемещения, функционально связанный с по меньшей мере первым из педальных узлов, а также с по меньшей мере первым из электрических разъемов, соединенным с тормозной системой. Первый датчик перемещения служит для обнаружения первого перемещения педального узла и выдачи по первому электрическому разъему первого сигнала на тормозную систему для ее активации в соответствии с величиной первого перемещения педального узла.
Модульная система управления тормозами и рулем направления содержит также систему управления рулем направления, смонтированную полностью внутри корпуса и функционально независимую от системы управления тормозами. Система управления рулем направления содержит второй датчик перемещения, функционально связанный с педальными узлами и соединенный со вторым из электрических разъемов, соединенным с рулевой системой. Второй датчик перемещений служит для обнаружения продольного перемещения педальных узлов и подачи по второму электрическому разъему второго сигнала на рулевую систему в зависимости от продольного перемещения педального узла относительно корпуса.
Еще один вариант осуществления изобретения предлагает модульную систему управления тормозами и рулем направления для применения на летательном аппарате, имеющем кабину экипажа с полом и имеющем тормозную систему с электродистанционным управлением и рулевую систему с электродистанционным управлением. Модульная система управления тормозами и рулем направления содержит корпус с рамой и монтируемым на раме кожухом. Рама устанавливается на полу кабины экипажа без прохождения сквозь пол при функциональном соединении данной модульной системы управления тормозами и рулем направления с тормозной и рулевой системами. Смонтированные на корпусе электрические разъемы функционально соединены с тормозной и рулевой системами. В стороны от корпуса отходят два педальных узла, каждый из которых может поворачиваться и перемещаться в продольном направлении относительно корпуса.
Система управления рулем и тормозами размещена полностью внутри корпуса и смонтирована на раме. Система управления тормозами соединена с педальными узлами и с по меньшей мере первым из электрических разъемов, соединенным с тормозной системой. Система управления тормозами обнаруживает поворотное движение педального узла и по первому электрическому разъему подает первый сигнал на тормозную систему для ее активации. Система управления рулем направления размещена полностью внутри корпуса и смонтирована на раме. Система управления рулем направления соединена с педальными узлами и может работать независимо от системы управления тормозами. Система управления рулем направления соединена с по меньшей мере вторым из электрических разъемов, соединенным с рулевой системой. Система управления рулем направления обнаруживает продольное перемещение педальных узлов и через второй электрический разъем подает сигнал на рулевую систему. Корпус, электрические разъемы, педальные узлы, система управления тормозами и система управления рулем направления образуют единый модуль, который можно устанавливать в кабине экипажа и удалять из кабины как единый блок.
Краткое описание чертежей
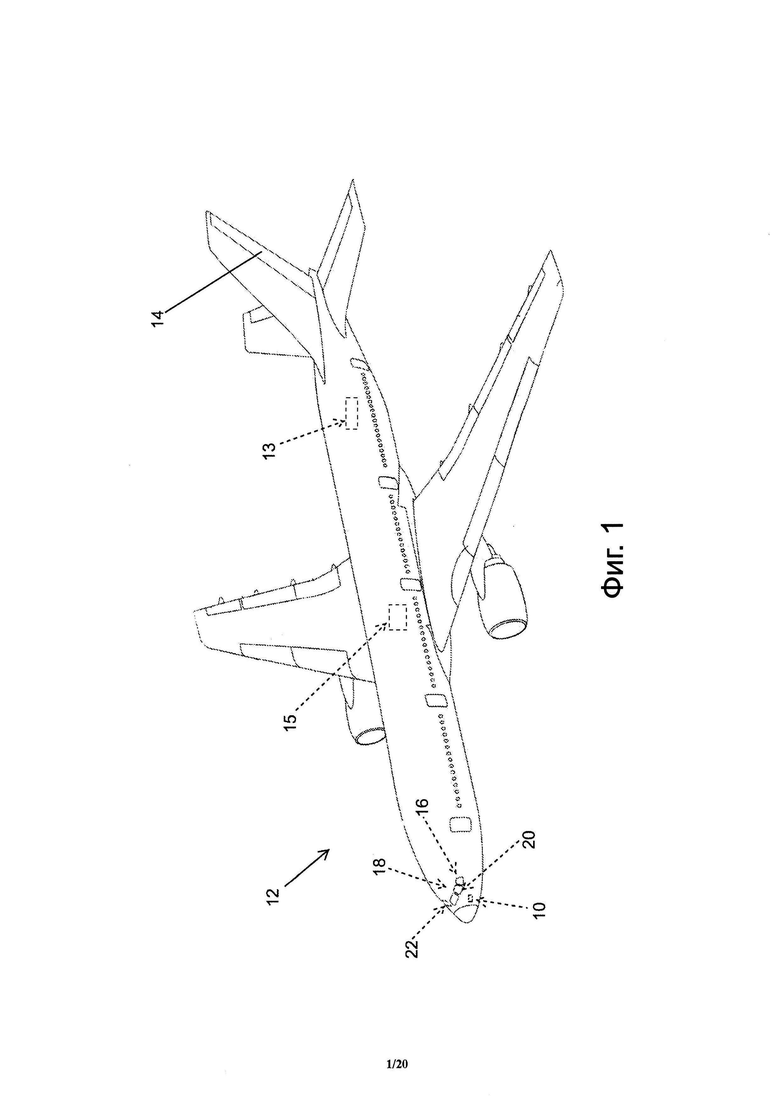
На фиг. 1 показано изометрическое изображение ЛА с напольной системой управления тормозами и рулем направления согласно одному из возможных вариантов осуществления настоящего изобретения;
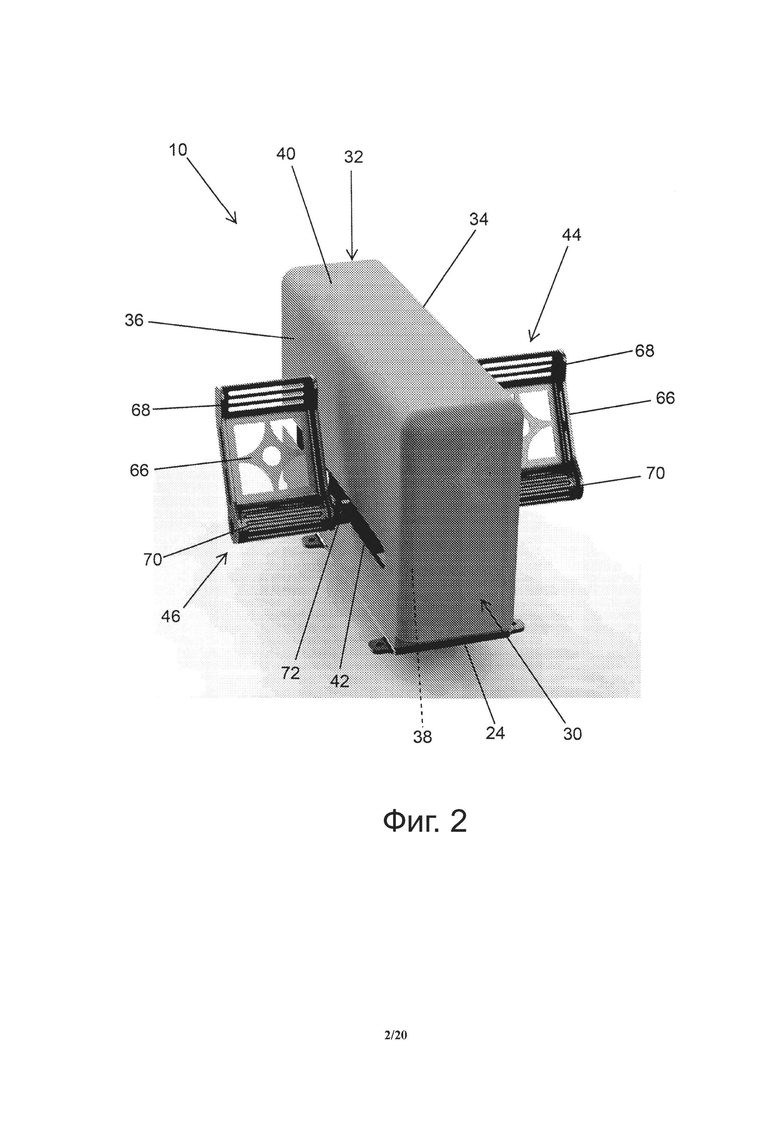
на фиг. 2 - изометрическое изображение (вид сзади) блока напольной системы управления тормозами и рулем направления, изображенной на фиг. 1, согласно одному или нескольким возможным вариантам осуществления настоящего изобретения;
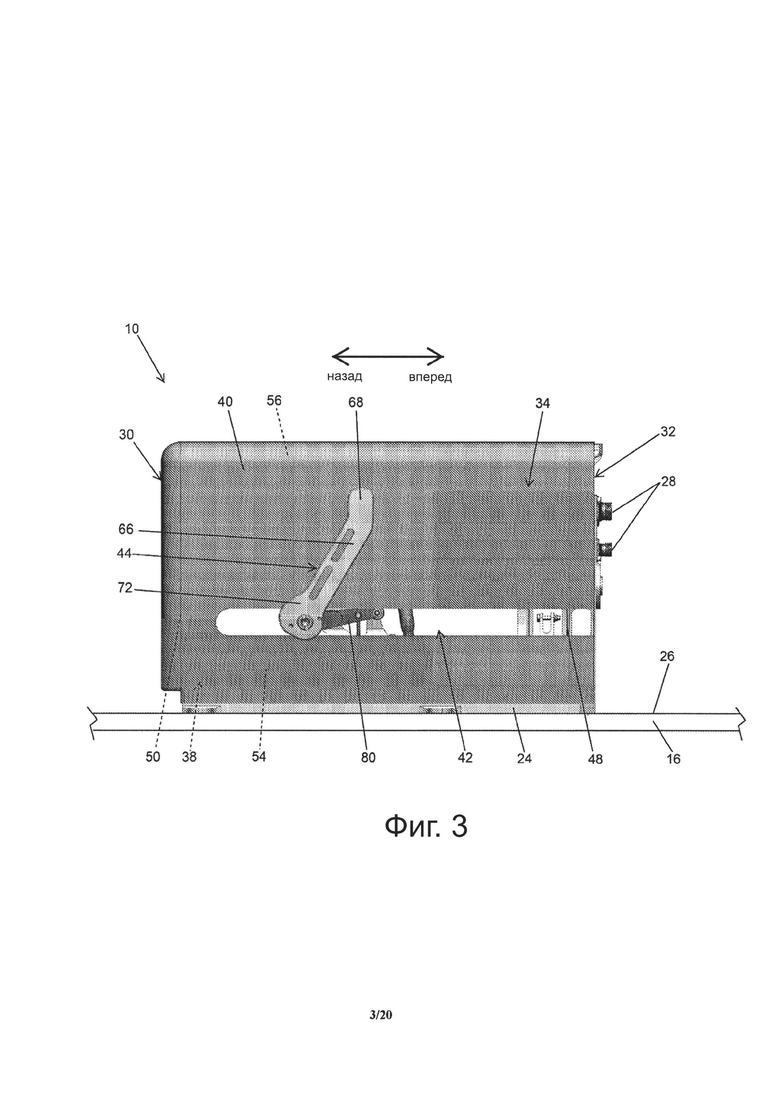
на фиг. 3 - вид сбоку блока напольной системы управления тормозами и рулем направления, показанного на фиг. 2;
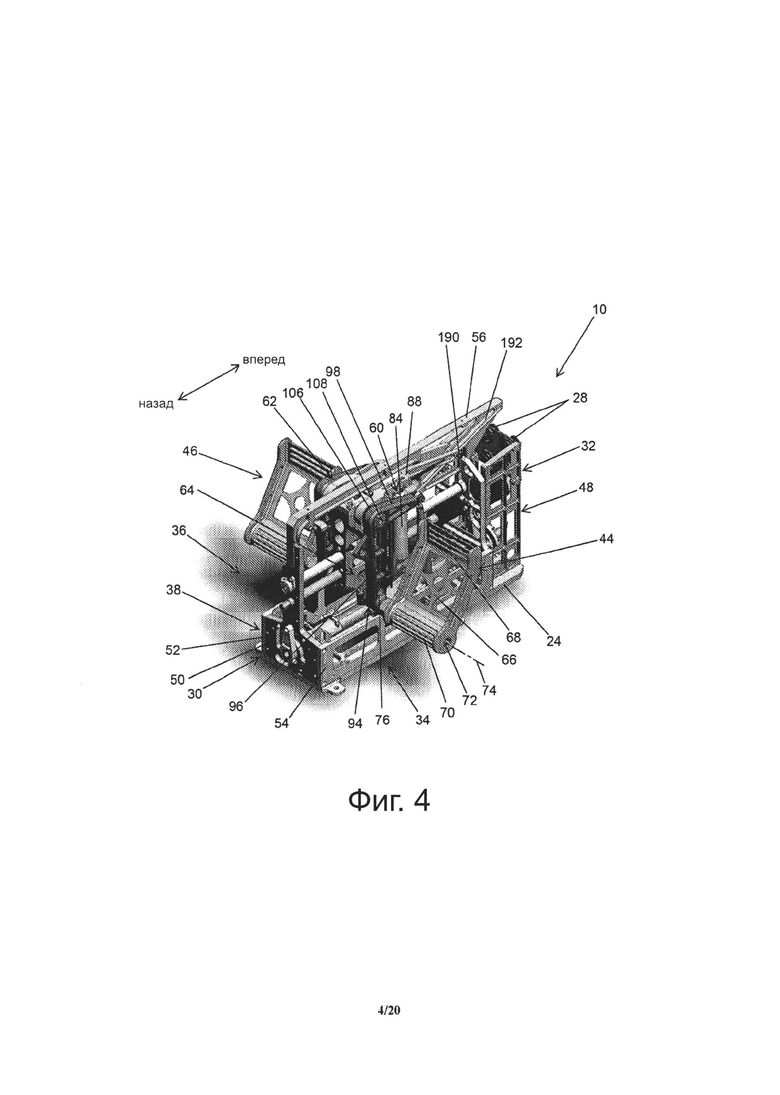
на фиг. 4 - изометрическое изображение (вид сзади) показанного на фиг. 2 блока напольной системы управления тормозами и рулем направления с удаленным корпусом в целях иллюстрации;
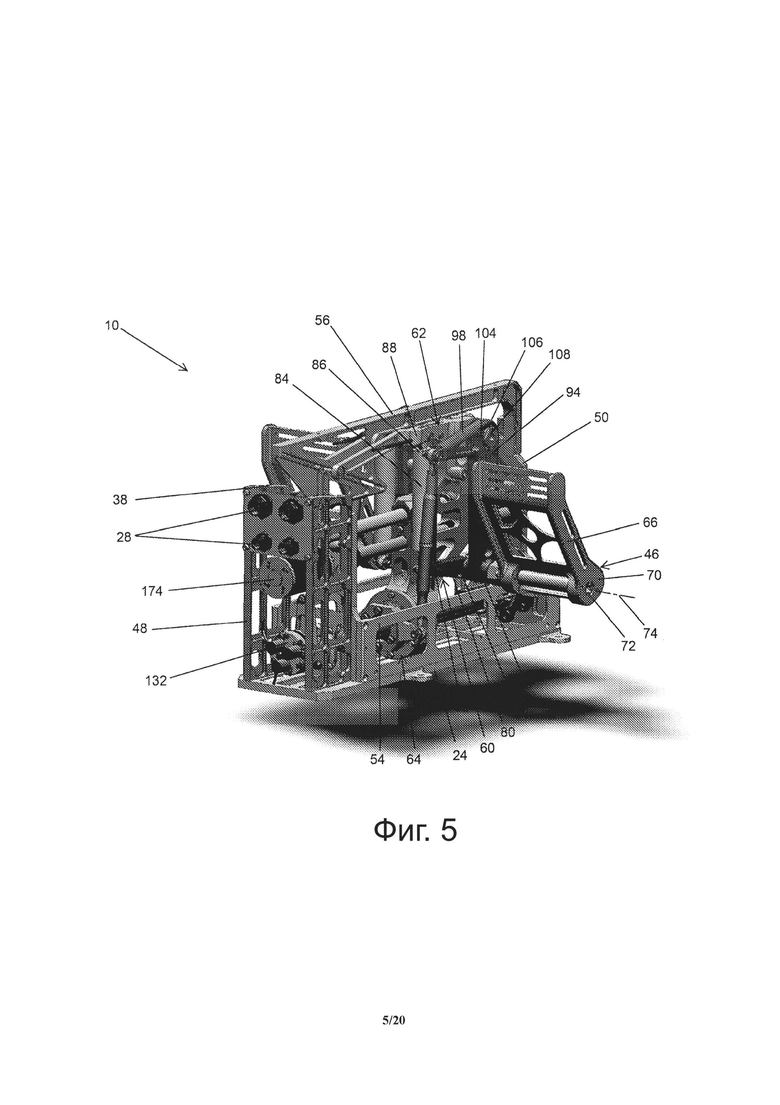
на фиг. 5 - изометрическое изображение (вид спереди) представленного на фиг. 2 блока напольной системы управления тормозами и рулем направления с корпусом, не показанным в целях иллюстрации;
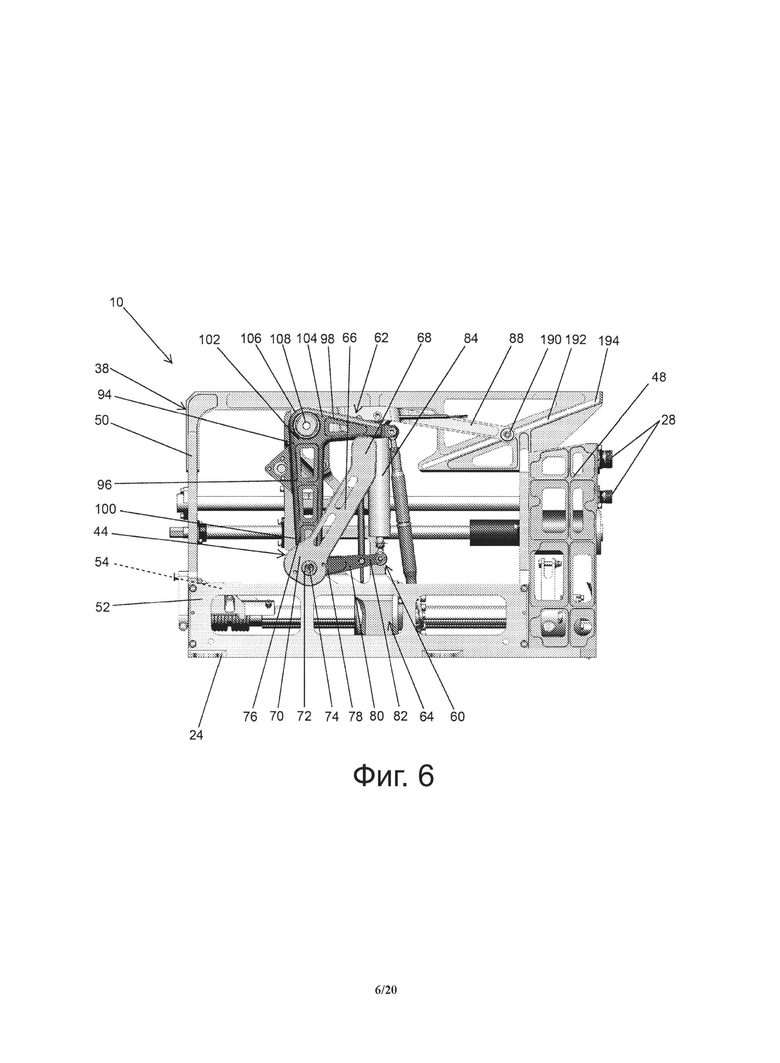
на фиг. 6 - вертикальный вид сбоку показанного на фиг. 3 блока напольной системы управления тормозами и рулем направления с корпусом, не показанным в целях иллюстрации;
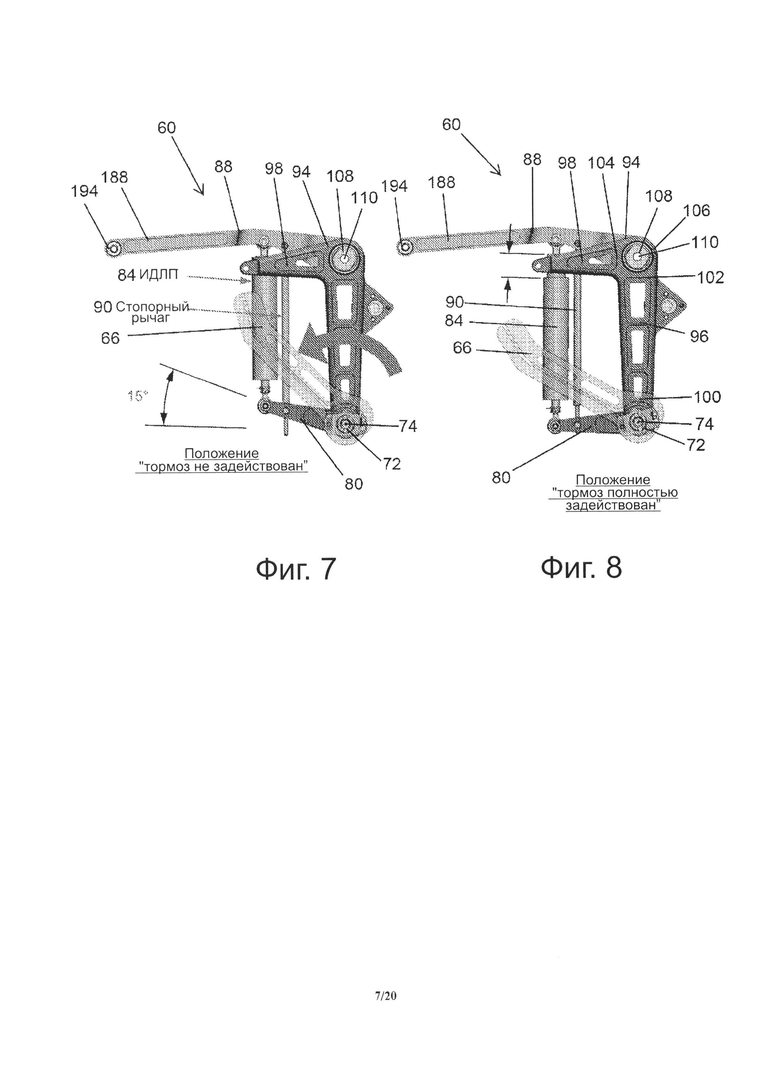
на фиг. 7 - схематичное изображение, по меньшей мере, определенных частей блока системы управления тормозами, показанных отдельно от представленного на фиг. 6 блока системы управления тормозами и рулем направления в целом, в незадействованном состоянии;
на фиг. 8 - схематичное изображение показанного на фиг. 7 блока управления тормозами в режиме торможения;
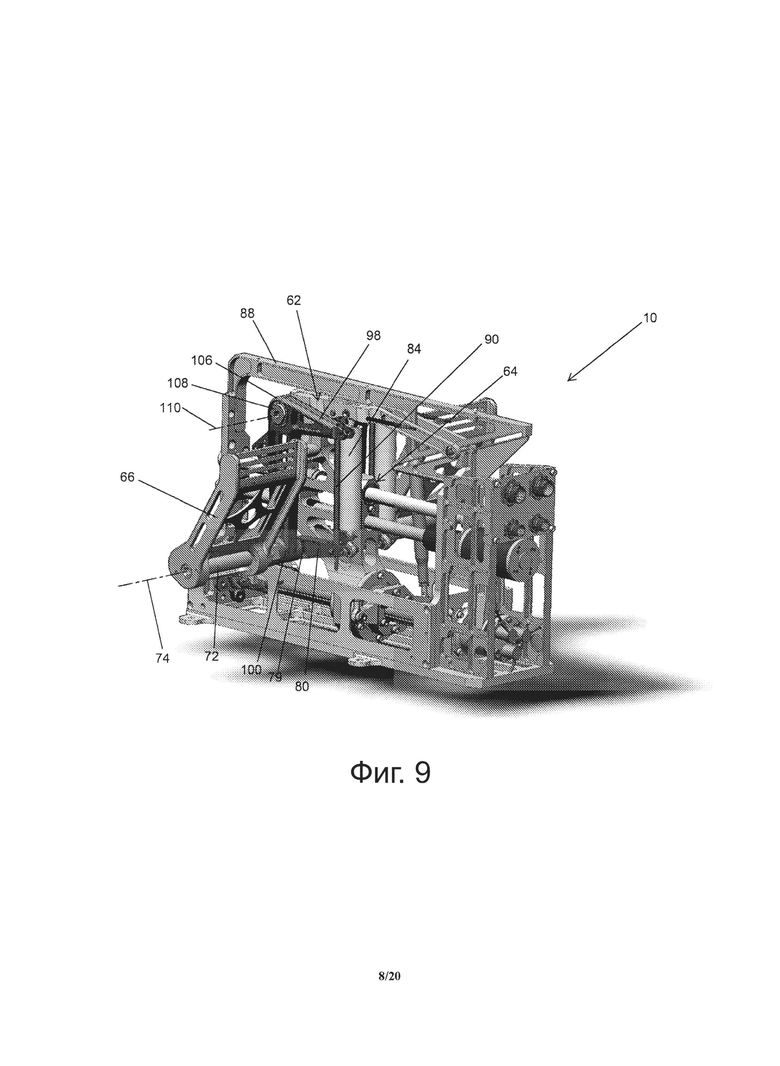
на фиг. 9 - изометрическое изображение (вид спереди) показанного на фиг. 4 блока напольной системы управления тормозами и рулем направления, отдельные элементы управления рулем направления которого не показаны для более ясного представления системы управления тормозами;
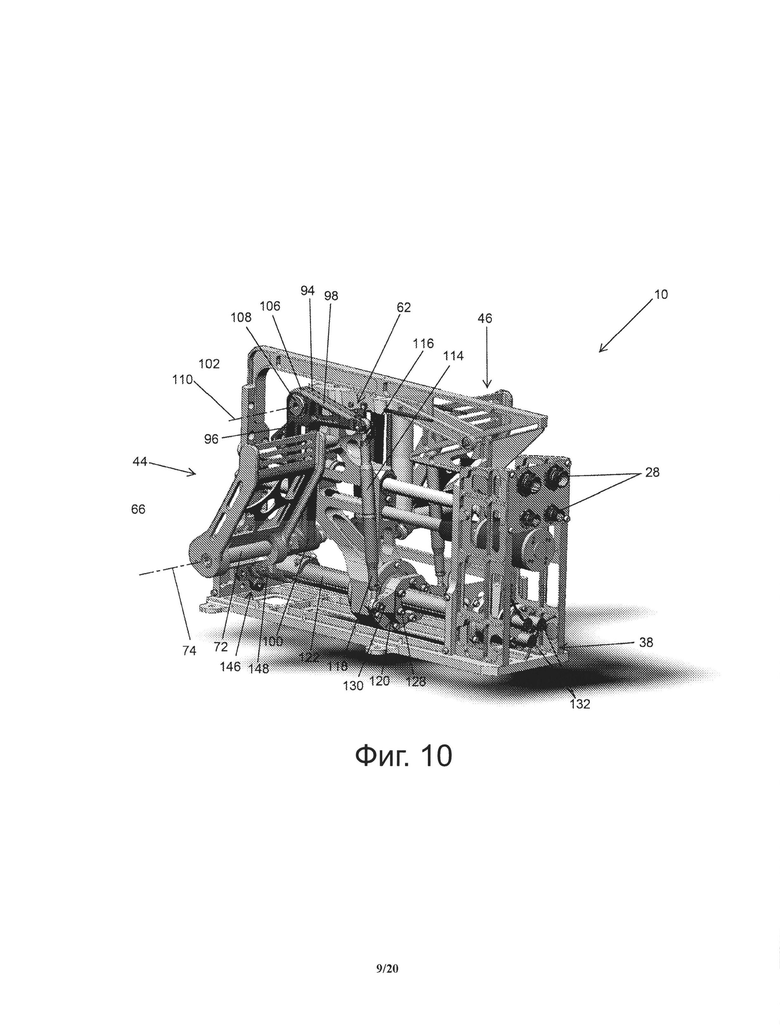
на фиг. 10 - изометрическое изображение (вид спереди) показанного на фиг. 4 блока напольной системы управления тормозами и рулем направления, отдельные элементы управления тормозами которого не показаны для более ясного представления системы управления рулем направления;
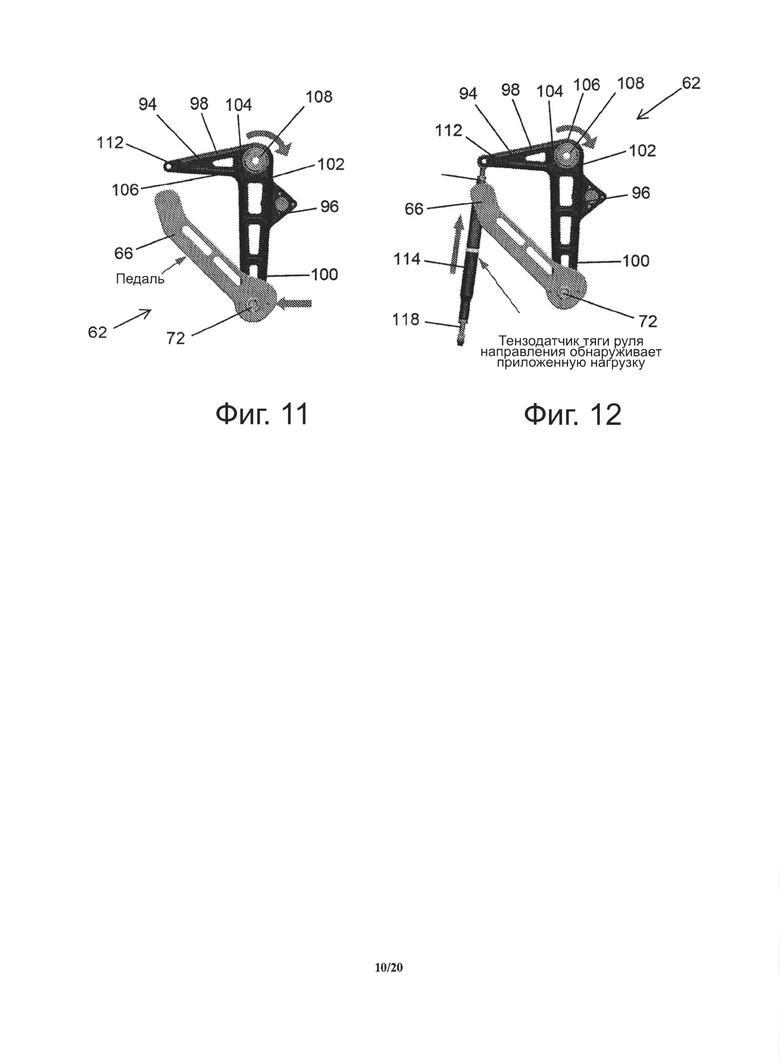
на фиг. 11 и 12 - частичный вертикальный вид сбоку компонентов блока управления рулем направления, в целях ясности показанных отдельно от блока системы управления в целом, изображенного на фиг. 10;
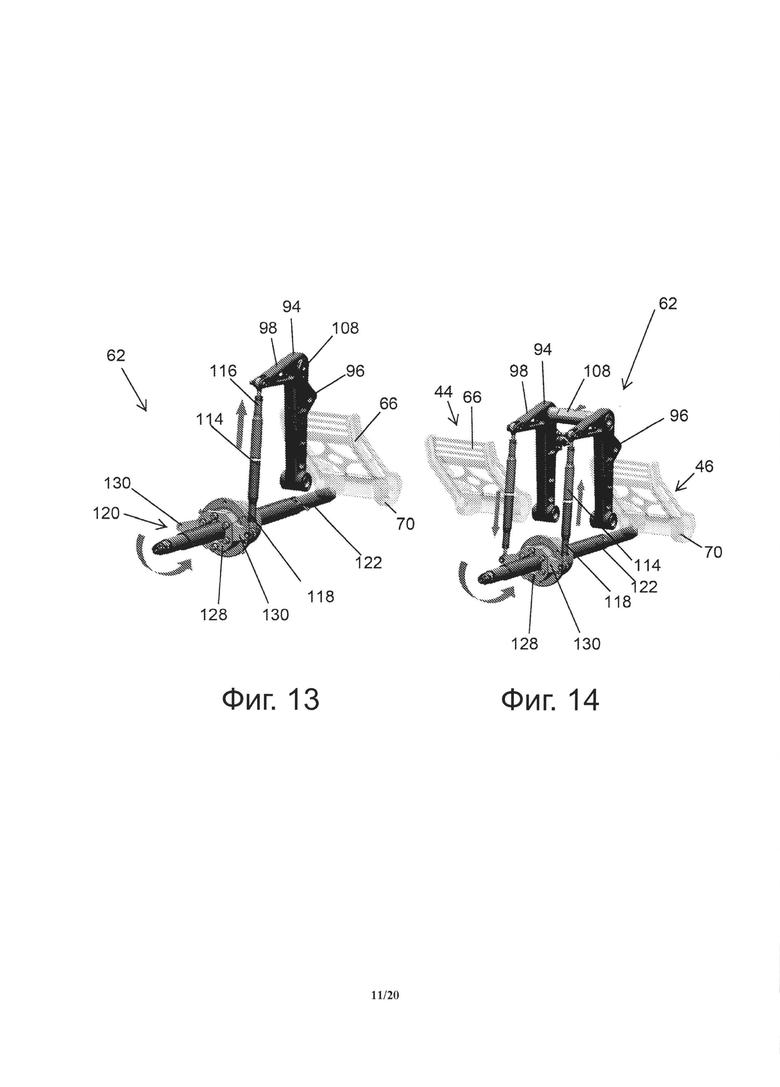
на фиг. 13 и 14 - частичные изометрические изображения компонентов блока управления рулем направления, в целях ясности показанных отдельно от блока системы управления в целом, изображенного на фиг. 10;
на фиг. 15 - увеличенное изометрическое изображение части блока управления рулем направления, в целях иллюстрации снятого с показанного на фиг. 10 блока системы управления в целом;
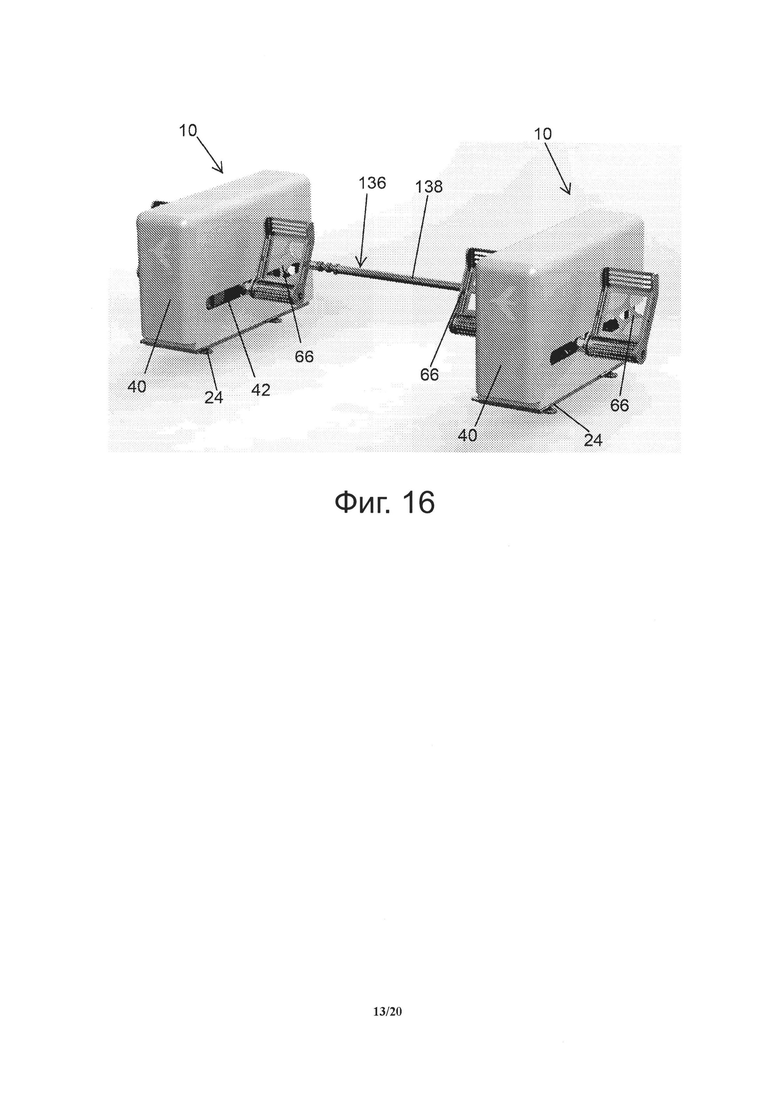
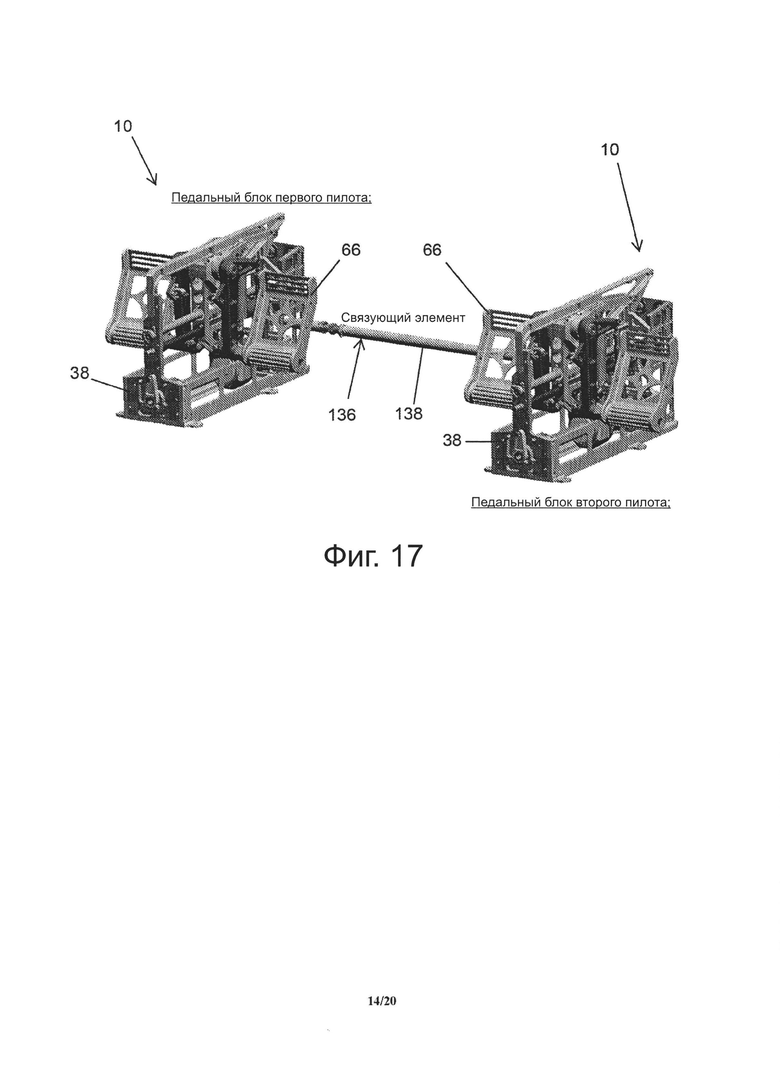
на фиг. 16 - изометрическое изображение двух модульных блоков управления тормозами и рулем направления согласно настоящему изобретению, соединенных соединительным штоком для обеспечения одновременной и одинаковой работы обоих блоков;
на фиг. 17 - изометрическое изображение показанных на фиг. 16 двух модульных блоков управления тормозами и рулем направления с корпусами, удаленными в целях иллюстрации;
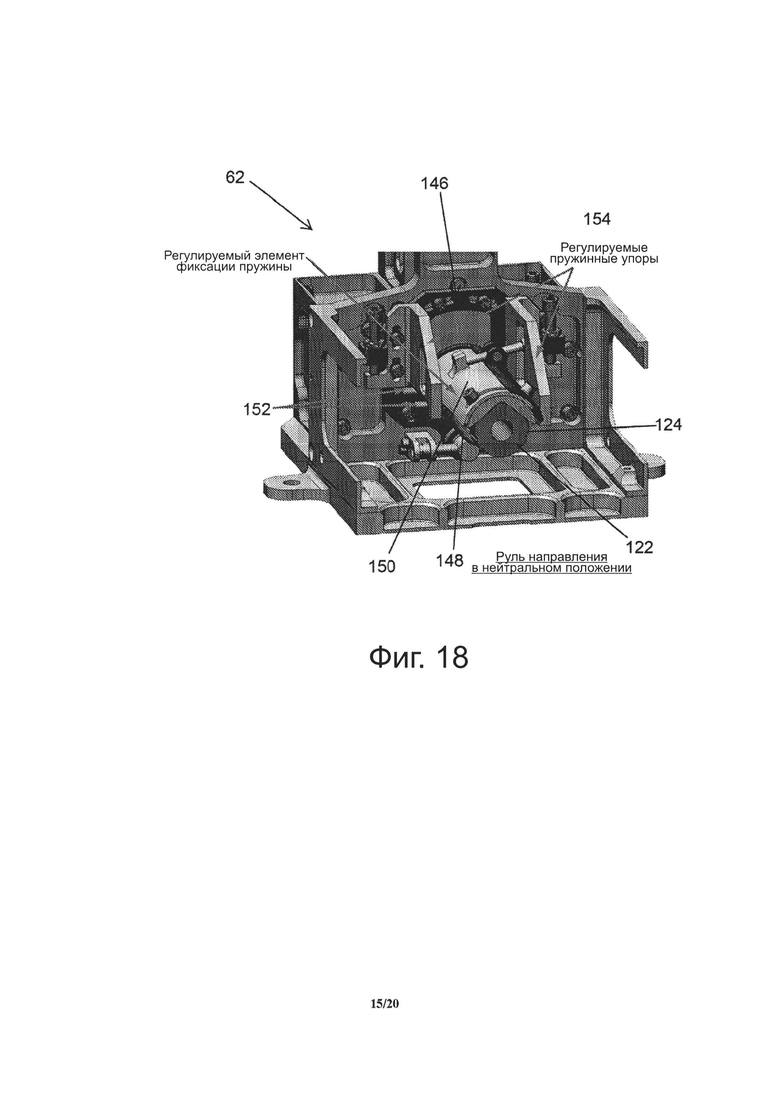
на фиг. 18 - увеличенное изометрическое изображение узла возврата руля направления блока управления рулем направления, показанного на фиг. 4; система возврата руля направления изображена в положении, соответствующем нейтральному положению руля направления;
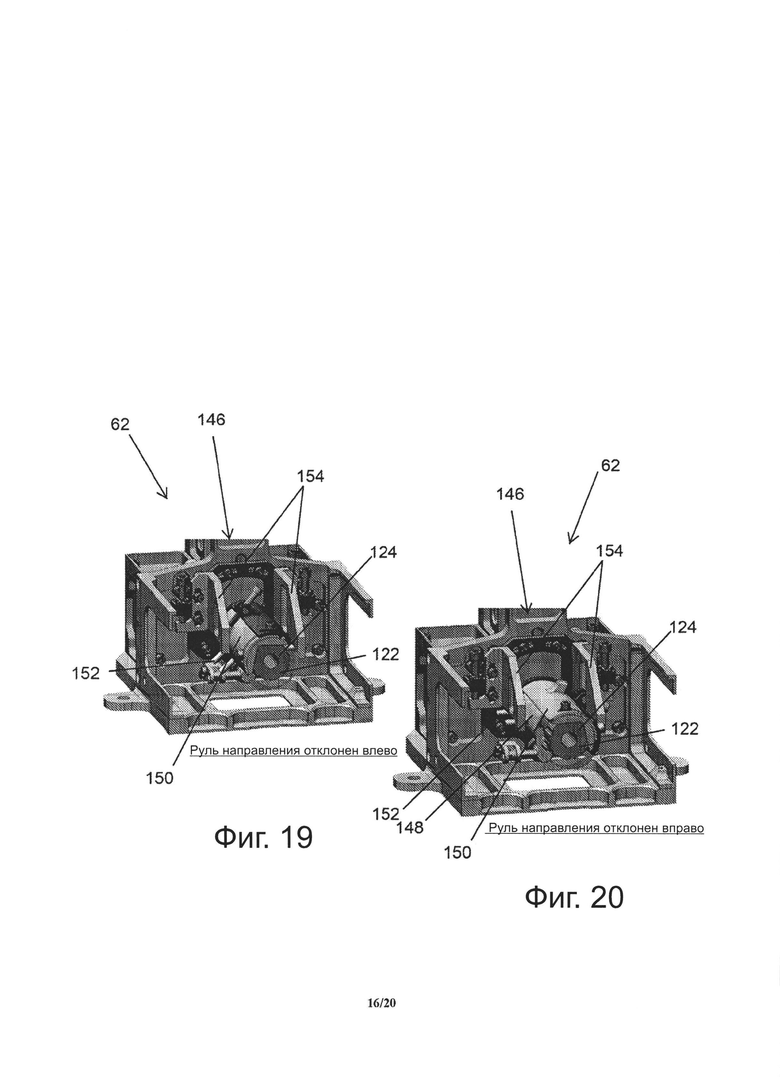
на фиг. 19 - увеличенное изометрическое изображение показанного на фиг. 18 узла возврата руля направления, изображенного в положении, соответствующем отклонению влево руля направления;
на фиг. 20 - увеличенное изометрическое изображение показанного на фиг. 18 узла возврата руля направления, изображенного в положении, соответствующем отклонению вправо руля направления;
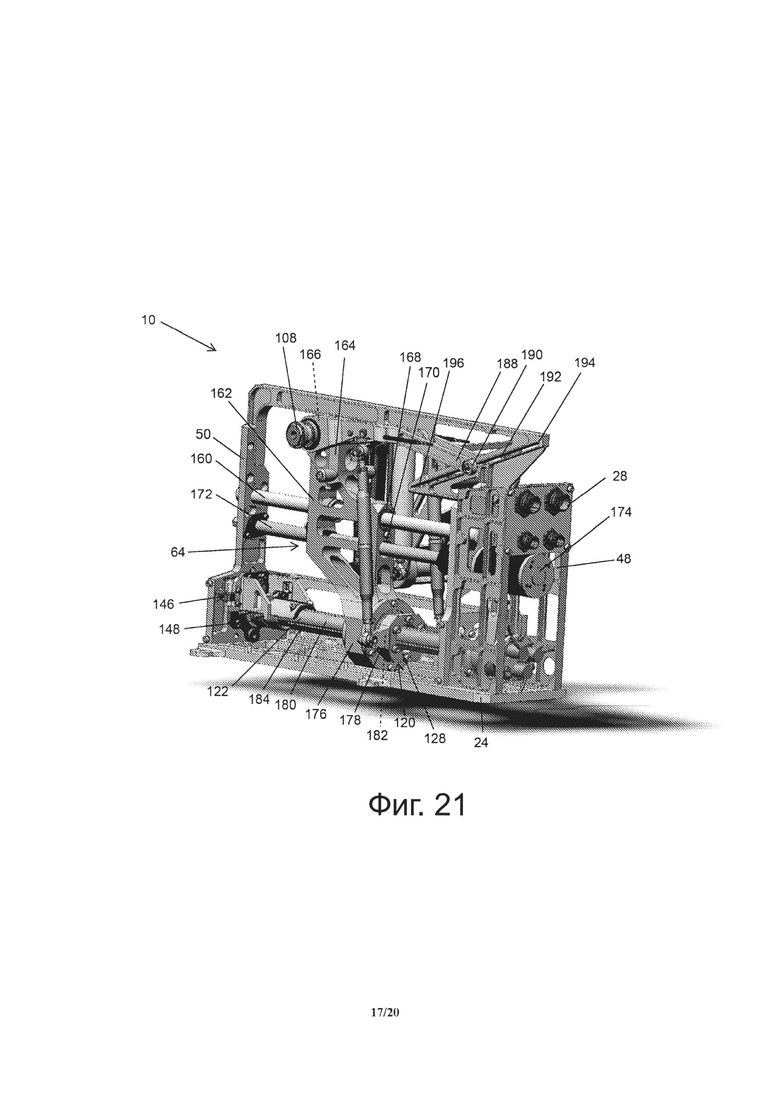
на фиг. 21 - частичное изометрическое изображение изображенного на фиг. 4 блока напольной системы управления тормозами и рулем направления, отдельные элементы узла педалей на котором не показаны с целью более ясного представления блока регулировки положения педалей, изображенного в промежуточном положении;
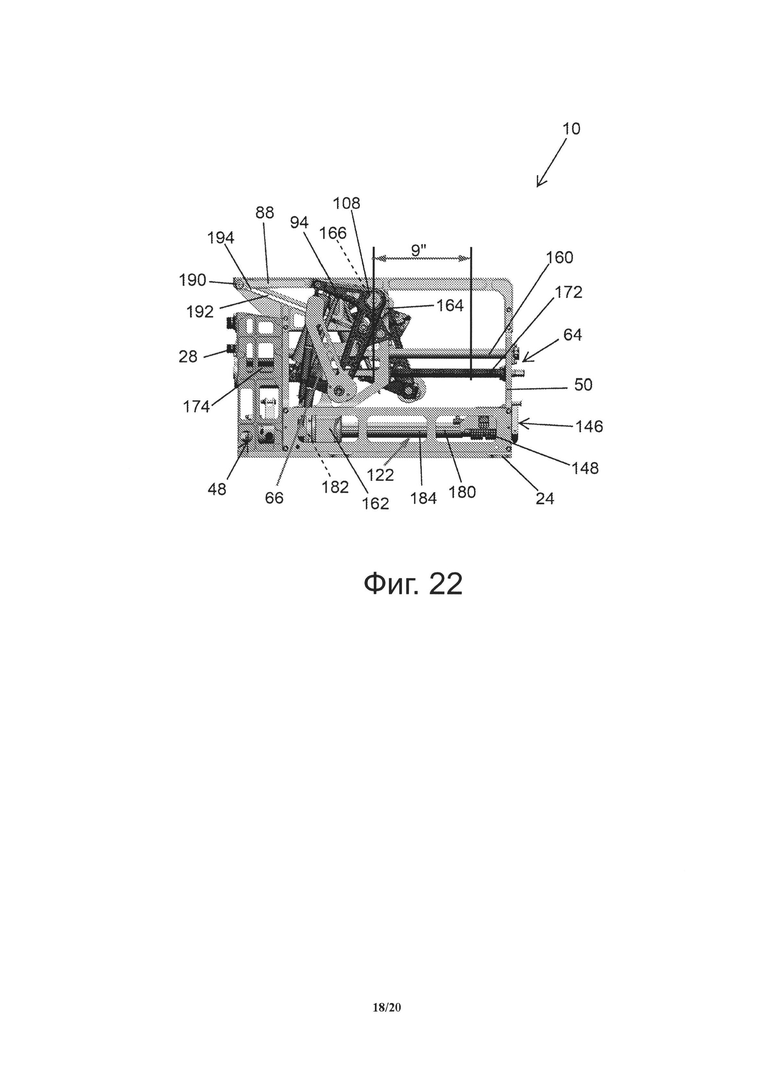
на фиг. 22 - вертикальный вид сбоку показанного на фиг. 21 блока регулировки положения педалей, с педалями, отжатыми вперед до упора;
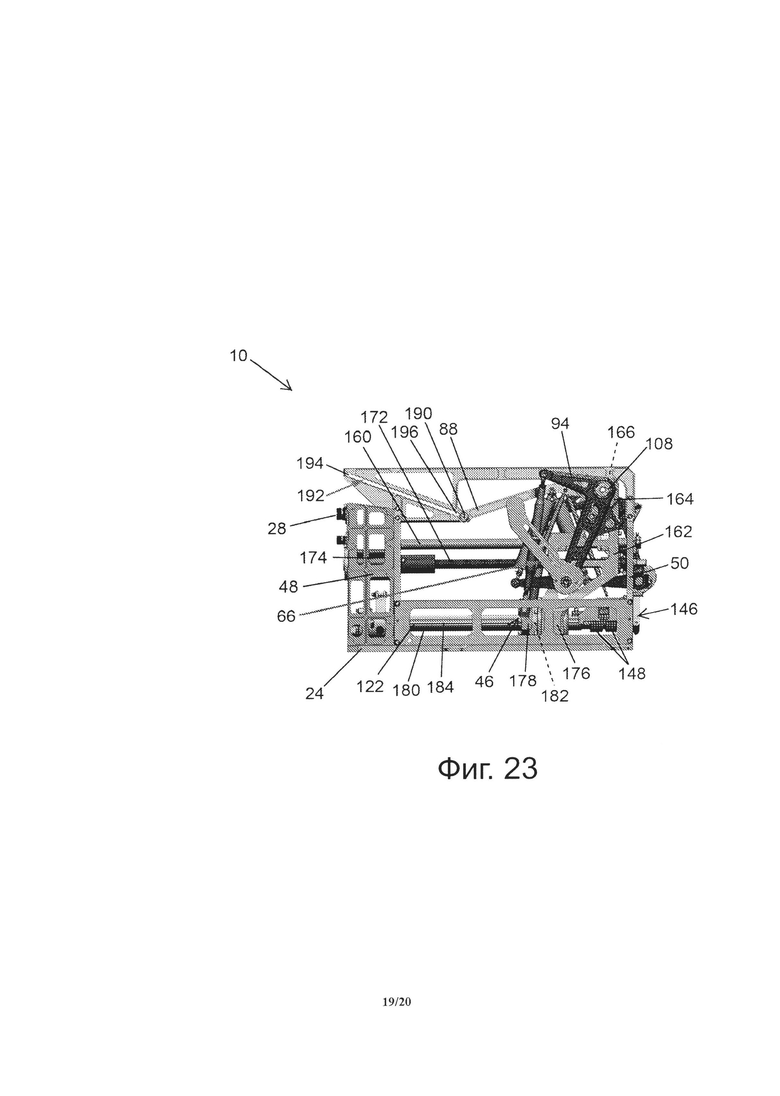
на фиг. 23 - вертикальный вид сбоку показанного на фиг. 21 блока регулировки положения педалей, с педалями в крайнем заднем положении;
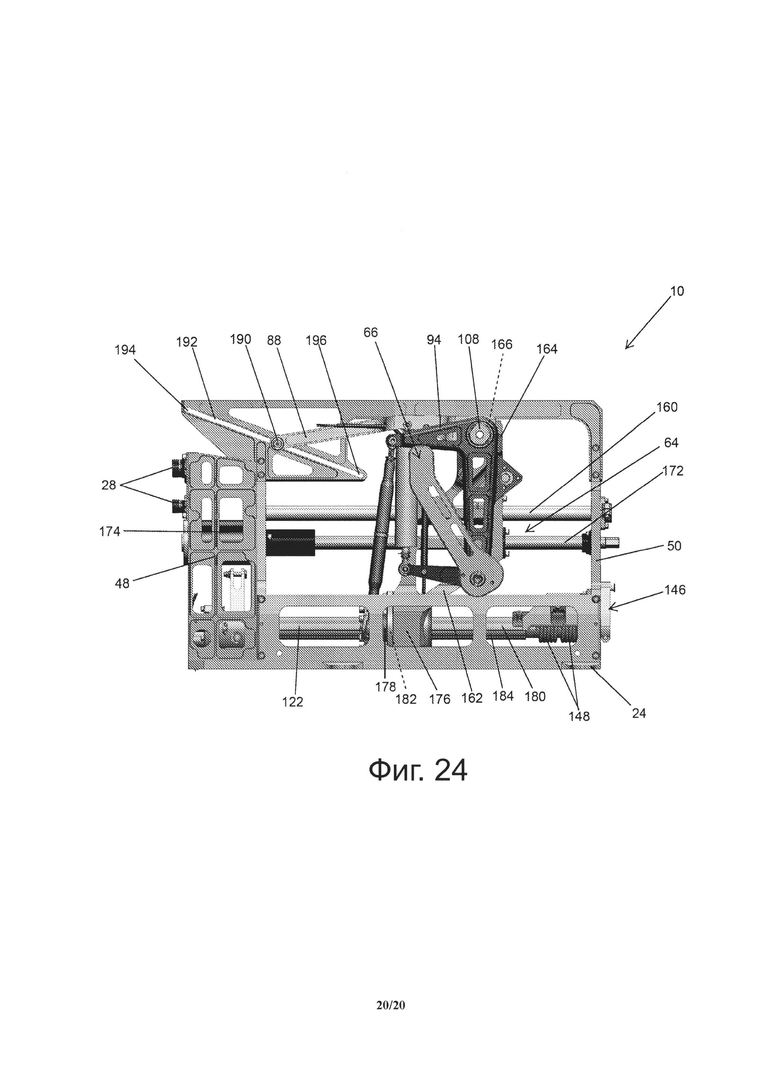
на фиг. 24 - частичный вертикальный вид сбоку показанного на фиг. 21 блока регулировки положения педалей, с педалями в промежуточном положении.
Осуществление изобретения
Система управления тормозами и рулем направления согласно настоящему изобретению, предназначенная для использования на ЛА с электродистанционными системами управления, показана на приведенных чертежах в целях иллюстрации. В приведенном ниже описании со ссылками на чертежи изложены некоторые конкретные детали вариантов исполнения данной системы для обеспечения глубокого понимания некоторых вариантов осуществления изобретения. Специалистам в данной области, однако, будет понятно, что возможны и некоторые другие варианты осуществления настоящего изобретения, и что другие варианты осуществления могут быть воплощены на практике без некоторых описанных ниже отличительных признаков.
На фиг. 1 схематично изображен ЛА 12 с электродистанционной системой 13 управления рулем направления, функционально соединенной с рулем 14 направления. ЛА 12 имеет также электродистанционную систему 15 управления тормозами, функционально соединенную с тормозами ЛА. ЛА 12 содержит напольный модульный электродистанционный блок 10 управления рулем направления и тормозами, электрически соединенный с системой 13 управления (СУ) рулем направления и СУ 15 тормозами и посылающий управляющие сигналы в данные системы. Модульный напольный блок 10 управления рулем направления и тормозами смонтирован на полу 16 кабины 18 экипажа ЛА в положении, в котором его может легко достать пилот, осуществляющий управление данным ЛА 12. В рассматриваемом варианте осуществления настоящего изобретения кабина 18 экипажа ЛА содержит рабочее место 20 командира воздушного судна и рабочее место 22 второго пилота, в каждом из которых установлен напольный блок 10 управления тормозами и рулем направления, предназначенный для использования соответственно капитаном или вторым пилотом для обеспечения управления ЛА.
Как показано на фиг. 2, напольный блок 10 управления тормозами и рулем направления представляет собой автономное модульное устройство, содержащее опорную плиту 24, прикрепленную к верхней поверхности 26 пола 16 без прохождения сквозь пол кабины. На передней поверхности данной напольной модульной системы 10 управления тормозами и рулем направления расположены несколько электрических разъемов 28, функционально соединенных с электродистанционными СУ рулем направления, тормозами и рулением ЛА. Такая модульная конструкция, не проходящая сквозь пол кабины экипажа, позволяет быстро и легко осуществлять ее установку, производить техобслуживание и замену, при этом обладая малыми габаритными размерами, что уменьшает требования по доступному пространству в кабине экипажа.
При описании блока 10 управления рулем направления и тормозами используются термины "передний/задний", "внутренний/внешний (относительно продольной оси ЛА)", что соответствует обычной системе координат для кабины 18 экипажа ЛА 12. Следует иметь в виду, что блок 10 управления тормозами и рулем направления может иметь или может не иметь какую-либо другую ориентацию относительно выбранной монтажной поверхности. Кроме того, показанный на чертежах модульный блок 10 управления тормозами и рулем направления описывается для рабочего места 20 командира воздушного судна 12. Однако модульный блок 10 управления тормозами и рулем направления может быть установлен не только на рабочем месте 20 командира воздушного судна, но и на рабочем месте 22 второго пилота.
Как показано на фиг. 2 и 3, блок 10 управления тормозами и рулем направления содержит заднюю часть 30, переднюю часть 32, внутреннюю часть 34 и внешнюю часть 36 применительно к рабочему месту капитана воздушного судна слева от продольной оси фюзеляжа ЛА. Блок 10 управления тормозами и рулем направления содержит внутреннюю раму 38, которая включает в себя опорную плиту 24 и к которой крепится съемный корпус 40. Каждая боковая стенка 42 корпуса 40 содержит педальный паз 42 удлиненной формы, расположенный параллельно полу 16, на котором установлена опорная плита 24. Часть внутреннего педального узла 44 выступает из паза 42 на внутренней боковой стенке корпуса 40, а часть внешнего педального узла 46 выходит из паза 42 на внешней боковой стенке корпуса. Форма и размеры пазов 42 выбраны таким образом, чтобы обеспечивалось горизонтальное перемещение педальных узлов 44 и 46 относительно пола 16 при работе блока управления рулем направления и регулировке положения педальных блоков 44 и 46, что будет более подробно описано ниже.
На фиг. 4 и 5 приведены изометрические изображения блока 10 управления тормозами и рулем направления с корпусом 40, снятым с внутренней рамы 38, чтобы показать внутренние компоненты системы. Опорная плита 24 прикреплена к передней и задней частям 48 и 50 рамы 38, а также к ее внутренней и внешней боковым панелям 52 и 54, проходящими между указанными передней и задней частями 48 и 50. Рама 38 содержит также верхний рамный элемент 56, расположенный, в целом, по продольной центральной оси рамы и соединяющийся с передней и задней частями 48 и 50 рамы.
Блок 10 управления тормозами и рулем направления содержит три независимые системы, функционально соединенные с рамой 38. К данным трем системам относятся блок 60 управления тормозами, блок 62 управления рулем направления и блок 64 регулировки педалей, управление и работа каждого из которых осуществляется независимо от остальных. Взаимодействие пилота с данными тремя системами осуществляется с помощью внутреннего и внешнего педальных узлов 44 и 46. Каждый педальный узел содержит ножную педаль 66, расположенную снаружи рамы 38 и корпуса 40 (см. фиг. 2) таким образом, чтобы с ней могла взаимодействовать нога пилота. Ножная педаль 66 содержит верхнюю переднюю часть 68 и нижнюю пяточную часть 70. Педальный вал 72 жестко крепится к задней пяточной части 70 педали и проходит сквозь горизонтальный паз 42 (см. фиг. 3) в боковой стенке корпуса во внутреннюю полость рамы 38. Продольная ось 74 педального вала 72, в целом, перпендикулярна центральной плоскости рамы 38, и педальный вал прикреплен к ножной педали 66, таким образом, что ножная педаль 66 и педальный вал 72 могут вращаться как единый элемент относительно продольной оси 74 вала. Такая конструкция педального узла обеспечивает возможность подачи пилотом управляющего сигнала для управления тормозной системой ЛА.
Система управления тормозами
Блок 60 управления тормозами устроен таким образом, что пилот может надавить на переднюю часть 68 внутренней и/или внешней ножной педали 66, чтобы активировать тормозную систему ЛА. Блоки 60 управления тормозами являются одинаковыми для внутреннего и внешнего педального узлов 44 и 46, поэтому мы рассмотрим лишь один из них. Педальный вал 72 педального узла проходит горизонтально от ножной педали 66 сквозь нижний конец 76 коленчатого рычага 94 и жестко крепится к заднему концу 78 тормозного рычага 80. Тормозной рычаг 80 отходит вперед от педального вала 72 и заканчивается передней частью 82. Тормозной рычаг 80 жестко прикреплен к педальному валу 72 таким образом, что ножная педаль 66, педальный вал 72 и тормозной рычаг 80 совместно вращаются относительно продольной оси 74 вала.
Передняя часть 82 тормозного рычага 80 прикреплена к механизму чувствительного элемента тормоза, который обнаруживает шарнирное перемещение ножной педали 66. В рассматриваемом варианте осуществления изобретения в качестве механизма чувствительного элемента тормоза используется бесконтактный индуктивный датчик 84 линейных перемещений (ИДЛП), прикрепленный своим нижним концом к переднему концу тормозного рычага 80. ИДЛП 84 электрически соединен, по меньшей мере, с одним из электрических разъемов 28 на передней части 48 рамы 38, тем самым обеспечивая соединение с тормозной системой ЛА, имеющей электродистанционное управление. Верхний конец 86 ИДЛП 84 надежно прикреплен к верхней тяге 88, которая остается в фиксированном положении, когда пилот надавливает на ножную педаль, чтобы привести в действие тормозную систему ЛА. ИДЛП 84 определяет расстояние и скорость перемещения тормозного рычага 80 при повороте ножной педали 66 относительно продольной оси 74 и генерирует сигнал управления тормозами, соответствующий расстоянию и/или скорости перемещения тормозного рычага 80.
Когда пилот надавливает на переднюю часть 68 какой-либо из ножных педалей 66, данная педаль и ее соответствующий тормозной рычаг 80 поворачиваются относительно продольной оси 74 вала крепления. Это вращательное движение передается на нижнюю часть ИДЛП 84, в результате чего происходит вытягивание ИДЛП 84 относительно верхней тяги 88, и ИДЛП 84 генерирует и посылает через один из разъемов 28 сигнал для активации системы управления 15 тормозами ЛА. В рассматриваемом варианте осуществления изобретения, ИДЛП 84 обеспечивает заданное сопротивление вращению ножной педали при надавливании на тормоз с целью создания чувства торможения и усилия отрыва, которые должен чувствовать пилот при задействовании тормозных педалей. Например, в ИДЛП 84 может использоваться дополнительная пружина для создания чувства сопротивления, когда пилот нажимает на ножную педаль 66 для задействования тормозов ЛА.
Несмотря на то, что в рассматриваемом варианте осуществления изобретения для обнаружения поступающего от пилота входного сигнала по включению тормозов используется ИДЛП 84, в других вариантах осуществления могут использоваться и другие сенсорные механизмы для обнаружения перемещения тормозного рычага 80 и подачи входного сигнала на тормозную систему ЛА через электрические разъемы 28. Как внешний, так и внутренний педальные узлы 44, 46 соединены с независимыми системами торможения, каждая из которых может быть активирована пилотом, по отдельности или совместно, чтобы обеспечить управляющий сигнал торможения для тормозной системы 15 ЛА (фиг. 1).
На фиг. 7 и 8 показаны части блока 60 управления тормозами отдельно от рамы 38 и других элементов напольного блока 10 управления тормозами и рулем направления, чтобы лучше продемонстрировать отличительные признаки блока 60 управления тормозами. На фиг. 9 представлено изометрическое изображение (вид спереди) напольного блока 10 управления тормозами и рулем направления, отдельные элементы блока 62 управления рулем направления на котором не показаны для более ясного представления блока 60 управления тормозами. Как видно из данных иллюстраций, блок 60 управления тормозами содержит стопорный рычаг 90, соединенный с тормозным рычагом 80 перед педальным валом 72. Верхний конец стопорного рычага 90 прикреплен к верхней тяге 88. Длина данного стопорного рычага 90 выбрана таким образом, чтобы тормозной рычаг 80 при нажатии на педаль тормоза мог поворачиваться относительно оси в определенном диапазоне от положения "тормоз не задействован" (фиг. 7) до положения "тормоз полностью задействован" (фиг. 8). В рассматриваемом варианте осуществления изобретения стопорный рычаг 90 позволяет тормозному рычагу 80 поворачиваться относительно продольной оси 74 педального вала 72 на угол приблизительно 0°-15° включительно.
В показанном варианте исполнения данный диапазон вращательного движения тормозного рычага 80 соответствует осевому перемещению ИДЛП 84 приблизительно на 1 дюйм (2,54 см) при повороте ножной педали 66 из положения "тормоз не задействован" в положение "тормоз полностью задействован". В других вариантах осуществления изобретения внутренний и внешний педальные узлы 44 и 46 могут иметь другие значения хода поршня между положениями "тормоз не задействован" и "тормоз полностью задействован". Например, для обеспечения другого диапазона перемещения ножной педали для активации тормоза может быть использован более короткий или более длинный тормозной рычаг 80. Такое изменение длины хода тормоза может производиться в соответствии с предпочтениями пилота и/или другими эксплуатационными или эргономическими факторами. Блок 60 управления тормозами также может содержать возвращающие элементы соединенные с ИДЛП 84 или другими компонентами тормоза, которые возвращают ножные педали в положение "тормоз не задействован".
Система управления рулем направления
Блок 62 управления рулем направления работает независимо от блока 60 управления тормозами таким образом, что пилот может управлять рулем направления с помощью ножных педалей 66 независимо от активации блока 60 управления тормозами. При необходимости, активация блока 62 управления рулем направления также может производиться одновременно с блоком 60 управления тормозами.
На фиг. 10 приведено частичное изометрическое изображение (вид спереди) напольного блока 10 управления тормозами и рулем направления, причем отдельные элементы одного блока 60 управления тормозами (например, тормозной рычаг 80, ИДЛП 84 и стопорный рычаг 90) не показаны для более ясного показа блока 62 управления рулем направления. Конструкция блоков 62 управления рулем направления для внутреннего и внешнего педального узлов 44 и 46 идентична, поэтому мы подробно рассмотрим лишь один из них. Как показано на чертежах, каждый педальный узел 44 и 46 соединен с Г-образным коленчатым рычагом 94, который содержит, в целом, вертикальное плечо 96 и, в целом, горизонтальное плечо 98. Вертикальное плечо 96 своим нижним концом 100 шарнирно соединено с педальным валом 72 между ножной педалью 66 и тормозным рычагом 80 (см. фиг. 10). Верхний конец 102 вертикального плеча переходит в задний конец 104 горизонтального плеча 98 и жестко соединен с ним. В месте пересечения вертикального плеча 96 с горизонтальным плечом 98 коленчатого рычага 104 расположена промежуточная шарнирная часть 106, расположенная над педальным валом 72. Коленчатый рычаг 94 в своей промежуточной шарнирной части 106 шарнирно соединен с опорным валом 108 коленчатого рычага руля направления, соединенным с рамой 38, таким образом, что коленчатый рычаг 94 может поворачиваться относительно рамы 38, совершая вращательное движение вокруг опорного вала 108.
Продольная ось 110 опорного вала 108, в целом, параллельна продольной оси 74 педального вала 72. Таким образом, при перемещении вперед или назад пяточной части 70 ножной педали происходит перемещение нижнего конца 100 вертикального плеча 96 коленчатого рычага соответственно вперед или назад относительно рамы 38. Как показано на фиг. 11 и 12, данное перемещение приводит к поворачиванию коленчатого рычага 94 в его промежуточной шарнирной части 106 относительно опорного вала 108 коленчатого рычага руля направления, что заставляет передний конец 112 горизонтального плеча 98 перемещаться вверх или вниз относительно рамы 38. Тяга 114 руля направления своим верхним концом шарнирно соединена с передним концом 112 горизонтального плеча 98 коленчатого рычага. Нижний конец 118 тяги руля направления жестко соединен с педальным соединительным узлом 120, функционально соединяющим внутренний и внешний педальные узлы 44 и 46.
Как показано на фиг. 10, педальный соединительный узел 120 содержит приводной вал 122 руля направления, установленный с возможностью вращения на раме 38 практически параллельно опорной плите 24 рамы 38. Задний конец 124 приводного вала 122 руля направления прикреплен с возможностью вращения к задней части 50 рамы 38, а передний конец 126 данного вала установлен с возможностью вращения в передней части 48 рамы, так что продольная ось приводного вала 122 руля направления совпадает с центральной осью рамы и перпендикулярна педальному валу 72. На приводном валу 122 руля направления установлено поворотное соединение 128 таким образом, что приводной вал руля направления и поворотное соединение могут вращаться как единое целое относительно рамы 38.
Как показано на фиг. 13 и 14, поворотное соединение 128 содержит пару свободных концов 130, расположенных напротив друг друга по разные стороны от приводного вала 122 руля направления. Каждый свободный конец 130 соединен с нижним концом 118 соответствующей тяги 114 руля направления. Таким образом, тяги 114 руля направления соединяют приводной вал 122 руля направления с Г-образными коленчатыми рычагами 94 и их соответствующими ножными педалями 66, чтобы их можно было смещать на одинаковое расстояние в противоположных направлениях относительно приводного вала 122 руля направления. Например, когда пилот производит нажатие одной педали 66 в направлении вперед относительно рамы 38 (см. фиг. 10), соответствующий коленчатый рычаг 94 шарнирно поворачивается относительно опорного вала 108 коленчатого рычага руля направления, поднимая, тем самым, горизонтальное плечо 98 и его соответствующую тягу 114 руля направления, которая вытягивает вверх соответствующий свободный конец 130 поворотного соединения 128, в результате чего происходит поворот приводного вала 122 руля направления относительно его продольной оси. Такой поворот приводного вала 122 руля направления в направлении против часовой стрелки, как показано на фиг. 13 и 14, приводит к оттягиванию противоположного свободного конца 130 поворотного соединения 128 вниз, в результате чего соединенная с ним тяга 114 руля направления и горизонтальное плечо 98 коленчатого рычага также смещаются вниз, коленчатый рычаг 94 шарнирно поворачивается и толкает противоположную ножную педаль 66 в направлении назад относительно рамы 38 (см. фиг. 10). Таким образом, внутренний и внешний педальные узлы 44 и 46 соединены друг с другом, и при нажатии пилотом на пяточную часть 70 ножной педали 66 происходит их смещение на равные расстояния в противоположных направлениях. В конструкции могут использоваться возвращающие элементы, например, одна или несколько торсионных пружин, расположенных концентрично приводному валу 122 руля направления, с целью создания непрерывно действующего крутящего момента, возвращающего педали 66 в нейтральное положение и обеспечивающего таким образом требуемую тактильную обратную связь для пилота.
Приводной вал 122 руля направления соединен с одним или несколькими датчиками 132 вращательного движения, показанными на фиг. 15. Датчики 132 вращательного движения служат для обнаружения вращательного движения приводного вала руля направления относительно его продольной оси вследствие введения пилотом управляющего сигнала посредством нажатия на педальные узлы 44 и 46 (фиг. 10) или вследствие командного сигнала, поступающего от системы автопилота. В рассматриваемом варианте осуществления изобретения, в качестве датчиков вращательного движения используются несколько индуктивных датчиков вращательного движения (ИДВД), установленных на переднем торце приводного вала 122 руля направления и функционально связанных с одним или несколькими электрическими разъемами 28 на передней части рамы 38 (см. фиг. 10). ИДВД выдают один или несколько сигналов, таких как изменяемое угловое смещение приводного вала в зависимости от поступающего от пилота командного сигнала через ножные педали 66. Данные сигналы через электрические разъемы 28 поступают в систему 14 управления рулем направления ЛА (см. фиг. 1). Таким образом, блок 62 управления рулем направления с помощью электрических разъемов 28 может быть быстро и легко соединен через электрические разъемы 28 с электродистанционной системой управления (ЭДСУ) ЛА для управления перемещением руля направления 14 ЛА (см. фиг. 1) без проведения управляющих средств сквозь пол кабины экипажа.
Как лучше показано на фиг. 15 и 16, по меньшей мере, в одном варианте исполнения блока 62 управления рулем направления имеется соединительный узел 136, функционально соединяющий блоки 62 управления рулем направления расположенных рядом модульных блоков 10 управления тормозами и рулем направления первого и второго пилотов ЛА. Этот соединительный узел 136 содержит регулируемый соединительный вал 138, механически соединяющий рабочее место одного пилота с рабочим местом другого и идентично передающий управляющий сигнал по отклонению руля направления с блока управления одного пилота на блок управления другого пилота.
В представленном варианте исполнения, соединительный вал 138 расположен практически перпендикулярно приводному валу 122 руля направления (см. фиг. 15). Каждый конец соединительного вала 138 функционально соединен с соединительным фланцем 140 (см. фиг. 15), прикрепленным к переднему концу приводного вала 122 руля направления. Соединительный фланец 140 поворачивается вместе с приводным валом 122 руля направления таким образом, что когда приводной вал 122 руля направления поворачивается относительно своей продольной оси, свободный конец 142 соединительного фланца 140, находящийся на некотором расстоянии от приводного вала 122 руля направления, перемещается по дуговидной траектории. Свободный конец 142 соединительного фланца 140 шарнирно соединен с концом соединительного вала 138. Таким образом, при повороте приводного вала 122 руля направления и соединительного фланца 140 происходит линейное перемещение соединительного вала 138 вбок, влево или вправо, в зависимости от направления вращения приводного вала руля направления. Это боковое перемещение соединительного вала 138 обеспечивает поворачивание на одинаковый угол приводных валов 122 обоих модульных блоков 10, к которым подсоединены концы соединительного вала. Таким образом, командный сигнал от пилота по управлению рулем направления, поступающий с рабочего места одного пилота, через соединительный узел 136 практически идентично передается и на рабочее место другого пилота.
Как можно заметить на фиг. 10 и 18-20, блок 62 управления рулем направления содержит центрирующий блок 146, который соединен с задней частью 124 приводного вала 122 руля направления. Данный центрирующий блок 146 служит для создания возвращающего усилия, которое стремится возвратить блок 62 управления рулем направления в нейтральное положение (положение без отклонения руля направления). В рассматриваемом варианте исполнения центрирующий блок 146 содержит две дублированные торсионные пружины 148 или иные вращательные возвращающие элементы, установленные на приводном валу 122 руля направления. Каждая торсионная пружина 148 прикреплена к приводному валу 122 руля направления с помощью фиксирующего элемента 150, закрепляющего торсионные пружины на валу и в то же время позволяющего приводному валу 122 руля направления вращаться относительно рамы 38.
Каждая пружина 148 имеет внутренний и внешний зацепляющие язычки 152, отходящие в сторону от приводного вала 122 руля направления. На задней части 50 рамы 38 рядом с торсионными пружинами 148 установлены внутренний и внешний регулируемые пружинные упоры 154. Каждый регулируемый пружинный упор 154 установлен таким образом, чтобы входить в зацепление с внутренним и внешним язычками 152 пружин и не давать им переместиться за упор при повороте приводного вала 122 и отходе от нейтрального положения, в котором руль направления не отклонен. Таким образом, торсионные пружины 148 создают сопротивление скручиванию, т.е. сопротивление повороту приводного вала 122 руля направления и его отклонению от нейтрального положения, и при повороте вала создают усилие, возвращающее его в нейтральное положение. В рассматриваемом варианте исполнения, дублированные торсионные пружины 148 создают крутящий момент величиной приблизительно 184 фунт*дюйм (21,2 кгс*м), что соответствует усилию величиной около 40 фунт-сил (18,14 кгс) на ножных педалях при полном отклонении руля направления в любом направлении. В одном из вариантов осуществления изобретения, центрирующий блок 146 может быть установлен на регулируемой опоре, конструкция которой позволяет регулировать пружинные упоры 154 и осуществлять регулировку нейтрального положения в заданном диапазоне, когда напольный блок 10 управления тормозами и рулем направления установлен на ЛА.
В одном из вариантов исполнения, напольный блок 10 управления тормозами и рулем направления может содержать регулировочный рычаг, прикрепленный к заднему концу 124 приводного вала 122 руля направления. Данный регулировочный рычаг содержит отверстие, совпадающее с отверстием в задней части 50 рамы, когда руль направления находится в нейтральном положении. В совмещенные отверстия входит установочный штифт или аналогичный элемент, который блокирует приводной вал руля направления, не позволяя ему вращаться, тем самым эффективно удерживая руль направления ЛА в нейтральном положении. В регулировочном рычаге и задней части рамы могут быть предусмотрены дополнительные совпадающие отверстия, в которые может входить вышеупомянутый установочный штифт, тем самым удерживая руль направления ЛА в полностью отклоненном влево или вправо положении или в других заданных промежуточных положениях.
Система регулировки педалей
Блок 64 регулировки педалей системы управления тормозами и рулем направления является функционально независимым от описанных выше блока 60 управления тормозами и блока 62 управления рулем направления. Блок 64 регулировки педалей позволяет осуществлять регулировку положения ножных педалей 66. Степень регулировки может быть выбрана на основе эргономических и человеческих факторов, связанных с особенностями строения тела разных пилотов. В представленном варианте осуществления изобретения, блок 64 регулировки педалей позволяет производить регулировку ножных педалей 66 по углу установки и положению в продольном направлении вперед-назад относительно рамы 38 без изменения длины хода педали, не оказывая влияния на работу блока 62 управления рулем направления или блока 60 управления тормозами.
Блок 64 регулировки педалей позволяет перемещать ножные педали 66 в диапазоне от крайнего переднего положения (см. фиг. 22), например, для пилота с длинными ногами, до крайнего заднего положения (см. фиг. 23), например, для пилота с более короткими ногами. В рассматриваемом варианте осуществления изобретения, блок 64 регулировки педалей обеспечивает возможность регулировки в горизонтальном направлении в диапазоне приблизительно 9 дюймов (22,86 см) относительно опорной плиты 24 рамы 38. Блок 64 регулировки педалей также обеспечивает возможность регулировки углового положения ножных педалей 66 в диапазоне приблизительно 18° относительно опорной плиты 24 рамы 38 с целью обеспечения типового расположения ног пилотов более высокого или менее высокого роста, сидящих в кресле пилота ЛА. Другие варианты осуществления изобретения могут обеспечивать регулировку положения ножных педалей по углу установки и продольному расположению в больших или меньших диапазонах.
На фиг. 24 показан частичный вертикальный вид сбоку напольного блока 10 управления тормозами и рулем направления, корпус которого и другие элементы не показаны с целью более ясной демонстрации блока 64 регулировки педалей. Как лучше всего показано на фиг. 21 и 24, блок 64 регулировки педалей содержит верхний направляющий стержень 160, передний и задний концы которого жестко прикреплены к передней и задней частям 48, 50 рамы. Направляющий стержень расположен практически параллельно опорной плите 24 рамы и совпадает с центральной продольной линией рамы. Направляющий стержень 160 проходит сквозь центральную поступательно перемещаемую направляющую конструкцию 162, которая может скользить по направляющему стержню 160, перемещаясь от переднего до заднего регулировочных положений относительно рамы 38. Центральная перемещаемая направляющая конструкция 162 расположена на центральной линии рамы, между двумя коленчатыми рычагами 94.
Центральная перемещаемая направляющая конструкция 162 содержит верхнюю часть 164 с выполненным в ней отверстием 166, в котором установлен опорный вал 108 коленчатого рычага руля направления, на котором, в свою очередь, установлены Г-образные коленчатые рычаги 94. Соответственно, центральная перемещаемая направляющая конструкция 162 может перемещаться вместе с внутренним и внешним педальными узлами 44 и 46, как единое целое, в диапазоне между передним и задним регулировочными положениями. В центральной перемещаемой направляющей конструкции 164 также предусмотрен ряд верхних и нижних продольно-ориентированных отверстий 168 и 170 (фиг. 21). Верхний направляющий стержень 160 проходит с возможностью скольжения сквозь ряд верхних отверстий 168. Ниже располагается горизонтальный приводной вал 172, в вертикальном направлении расположенный в одной плоскости с верхним направляющим стержнем 160. Приводной вал 172 проходит сквозь ряд нижних отверстий 170 в центральной перемещаемой направляющей конструкции 162 и своими передним и задним концами закреплен с возможностью вращения на раме 38.
В рассматриваемом варианте исполнения, приводной вал 172 выполнен с резьбой, и, по меньшей мере, одно из нижних отверстий 170 центральной направляющей опоры 162 содержит соответствующую резьбу, в которую вворачивается резьбовой приводной вал 172. Приводной электромотор 174 соединен с передним концом приводного вала 172 и при включении осуществляет вращение приводного вала 172 вокруг его продольной оси. Когда приводной электромотор 174 вращает приводной вал 172, резьбовое соединение приводного вала с центральной направляющей опорой 162 обеспечивает перемещение центральной направляющей опоры 162 вперед или назад по приводному валу 172 и вдоль верхнего направляющего стержня 160. Такое перемещение центральной направляющей опоры 162 приводит к одновременному перемещению педальных узлов 44 и 46 вперед или назад относительно рамы 38. Резьбовой приводной вал 172 можно вращать вручную для ручной регулировки положения педалей относительно рамы 38. Несмотря на то, что в рассмотренном варианте исполнения для регулировки положения педалей используется электромотор и резьбовой приводной вал, в других вариантах осуществления изобретения могут использоваться и другие приводные механизмы для перемещения педальных узлов в горизонтальном направлении в регулировочном диапазоне.
Нижняя часть 176 центральной перемещаемой направляющей опоры 162 также соединяется со шлицевой муфтой 178, которая установлена на приводном валу 122 руля направления. Кроме того, шлицевая муфта 178 жестко прикреплена к поворотному соединению 128 (фиг. 21) педального соединительного узла 120. В рассматриваемом варианте исполнения, поворотное соединение 128 представляет собой коленчато-рычажное соединение, которое прикреплено к шлицевой муфте таким образом, что может перемещаться в осевом направлении и поворачиваться вместе с шлицевой муфтой 178. Шлицевая муфта 178 также установлена с возможностью скольжения на шлицованной части 180 приводного вала 122 руля направления. Шлицевая муфта 178 содержит центральное отверстие 182 с одним или несколькими пазами, в которые входят с возможностью скольжения продольные шлицы 184 на внешнем диаметре шлицованной части 180 вала. Таким образом, данное шлицевое соединение обеспечивает возможность поворачивания шлицевой муфты 178, поворотного соединения 128 и приводного вала 122 руля направления (за счет его шлицованной части 180) как единое целое относительно продольной оси вала, когда одна ножная педаль 66 перемещается вперед, а другая ножная педаль 66 перемещается назад, для регулирования положения руля направления ЛА. Шлицевая муфта 178 может также перемещаться вдоль шлицованной части 180 при вращении резьбового приводного вала 172, чем обеспечивается возможность регулировки переднего/заднего положений педальных узлов 44 и 46 в их регулировочном диапазоне продольного перемещения, без какого-либо влияния на работу блока 62 управления рулем направления или блока 60 управления тормозами.
Блок 64 регулировки педалей также обеспечивает возможность регулировки углового положения каждой ножной педали 66 при перемещении педальных узлов вперед-назад в своем регулировочном диапазоне. Как лучше всего показано на фиг. 22-24, верхние тяги 88, упоминавшиеся при рассмотрении конструкции блока 60 управления тормозами, соединены с верхней частью каждого педального узла 44 и 46 и расположены рядом с верхним элементом 56 рамы. В рассматриваемом варианте осуществления изобретения, верхние тяги 88 внутреннего и внешнего педальных узлов 44 и 46 жестко соединены друг с другом. В других вариантах осуществления изобретения, верхние тяги 88 внутреннего и внешнего педальных узлов 44 и 46 могут быть не соединены друг с другом. Задний конец каждой тяги 88 шарнирно соединен с опорным валом 108 коленчатого рычага руля направления рядом с коленчатыми рычагами 94. К переднему концу 188 верхней тяги 88 прикреплен кулачок 190, установленный с возможностью скольжения в кулачковом пазу 192, выполненном в передней части верхнего рамного элемента 56.
Кулачковый паз 192 в верхнем рамном элементе 56 расположен под углом с наклоном вниз от верхнего переднего конца 194 к нижнему заднему концу 196 паза. При перемещении педальных узлов 44 и 46 в положениях между крайним передним и крайним задним положениями кулачок 190 может перемещаться по пазу 192. Когда педальные узлы 44 и 46 находятся в своем крайнем переднем положении, кулачок 190 расположен в верхнем переднем конце 194 кулачкового паза. Когда педальные узлы 44 и 46, в результате вращения резьбового приводного вала 172, перемещаются в назад, кулачок 190 перемещается вниз по кулачковому пазу 192. Когда педальные узлы 44 и 46 перемещаются в свое крайнее заднее положение, кулачок 190 перемещается в задний конец 196 кулачкового паза 192.
Когда педальные узлы 44 и 46 при регулировке перемещаются из своего крайнего заднего положения в сторону крайнего переднего положения, каждая ножная педаль 66 поворачивается от горизонтальной плоскости в сторону вертикальной плоскости, чем достигается изменение угловой ориентации ножной педали для обеспечения лучшего взаимодействия с ногой пилота. В рассмотренном варианте осуществления изобретения, когда педальные узлы 44 и 46 находятся в своем крайнем заднем положении, и кулачок 190 находится в нижнем заднем конце 196 кулачкового паза 192, угол установки педалей составляет около 37°-39° относительно вертикальной плоскости. При перемещении педальных узлов 44 и 46 вперед в регулировочном диапазоне угол наклона ножных педалей 66 увеличивается приблизительно на 18°, пока педальные узлы расположены под углом приблизительно 21° относительно вертикальной плоскости, когда педальные узлы находятся в своем крайнем переднем положении, соответствующем расположению кулачка 190 в верхнем переднем конце 194 кулачкового паза 192.
Угловое положение ножных педалей 66 выбирают таким образом, чтобы их расположение являлось наиболее комфортным и удобным для пилота, сидящего в кресле кабины экипажа. В других вариантах осуществления настоящего изобретения возможны другие диапазоны регулирования углового положения ножных педалей 66, или их установка под другими углами в крайних регулировочных положениях. Например, в других вариантах осуществления настоящего изобретения может обеспечиваться другая угловая ориентация педальных узлов путем расположения кулачкового паза под другим углом относительно горизонтальной плоскости. Расположение кулачкового паза под более значительным углом может обеспечивать увеличенный диапазон угловой регулировки ножных педалей. Расположение кулачкового паза под меньшим углом относительно горизонтальной плоскости обеспечивает меньший диапазон углового регулирования положения ножных педалей между крайним передним и крайним задним положениями.
Как показано на фиг. 24, верхняя тяга 88 взаимодействует с ИДЛП 84 тормозной системы и/или стопорным рычагом 90 тормозной системы, тормозным рычагом 80 и вертикальным плечом 96 коленчатого рычага 94, образуя, таким образом, четырехрычажный механизм для каждого педального узла. Данный четырехрычажный механизм согласованное, организованное положение "тормоз не задействован" независимо от настроенного положения педалей и положения руля направления. Таким образом, в положении "тормоз не задействован" ИДЛП 84 расположен напротив вертикального плеча 96 коленчатого рычага, и равен ему по длине, так что вышеупомянутая четырехрычажная система позволяет перемещать педальные узлы 44 и 46 в любое положение регулировочного диапазона без случайного задействования или активации тормозов. Работа и функционирование блока 60 управления тормозами и блока 62 управления рулем направления остаются независимыми от положения педальных узлов в их диапазоне регулирования.
Описанные три независимые системы управления, выполненные в виде единого блока управления рулем управления и тормозами, представляют собой компактную, универсальную систему, которую можно быстро и легко устанавливать на верхней поверхности пола кабины экипажа ЛА без необходимости проводки соединительных элементов сквозь пол кабины для соединения с другими системами ЛА. Электрические разъемы в передней части модуля позволяют быстро и легко подключать или отключать данную систему к другим системам управления рулем направления, тормозами и штурвального управления с помощью электродистанционного интерфейса. Модульная конструкция системы также обеспечивает возможность быстрой и легкой установки, простоту техобслуживания и/или замены, например, при сборке на заводе, при модификации или в процессе эксплуатации.
Следует иметь в виду, что рассмотренный выше вариант осуществления настоящего изобретения был описан с целью иллюстрации его возможностей, однако, возможны и другие его модификации без отхода от сути изобретения. Кроме того, аспекты настоящего изобретения, раскрытые на примере конкретного варианта его осуществления, могут применяться в комбинациях или опускаться в иных вариантах осуществления. Несмотря на то, что преимущества, соответствующие определенным вариантам осуществления настоящего изобретения, были раскрыты в контексте этих вариантов, другие варианты осуществления также могут обладать данными преимуществами. Кроме того, не все варианты осуществления настоящего изобретения обязательно обладают преимуществами, входящими в объем настоящего изобретения. Таким образом, объем настоящего изобретения не определяется ничем иным, кроме как пунктами прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАГРУЗКИ ПЕДАЛИ НОЖНОГО ПОСТА СИСТЕМЫ УПРАВЛЕНИЯ ТОРМОЗАМИ САМОЛЕТА И ПЕДАЛЬНЫЙ УЗЕЛ НОЖНОГО ПОСТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2524808C1 |
| СПОСОБ ИСПЫТАНИЯ ПЕДАЛЬНОЙ СИСТЕМЫ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2007 |
|
RU2450310C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2001 |
|
RU2295747C2 |
| ВЕЛОСИПЕД (ВАРИАНТЫ), КОЛЕСО ВЕЛОСИПЕДА, ПРИВОД ВЕЛОСИПЕДА, РЫЧАЖНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА, ПЕДАЛЬНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА И КОМПЛЕКТ, СОДЕРЖАЩИЙ ВЕЛОСИПЕД И ПРИЦЕП | 2007 |
|
RU2373101C2 |
| ВЕЛОМОБИЛЬ | 2021 |
|
RU2755828C1 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| ПОЛНОПРИВОДНЫЙ ВЕЛОСИПЕД | 2008 |
|
RU2379211C1 |
| УНИВЕРСАЛЬНЫЙ АВТОЖИР | 2013 |
|
RU2543471C2 |
| ВЕЛОТРЕНАЖЕР | 1993 |
|
RU2081645C1 |
| ЦИРКУЛЯРНЫЙ ВЕЛОТРЕНАЖЕР КОМЛЕВА | 2013 |
|
RU2528363C1 |

Изобретение относится к системам управления аэродинамическими поверхностями и тормозами летательных аппаратов (ЛА). Модульная система устанавлена на полу кабины экипажа без прохождения сквозь пол при выполнении соединения системы с тормозной и рулевой системами ЛА, имеющими электродистанционное управление. Педальные узлы выходят из корпуса и могут поворачиваться и перемещаться в продольном направлении относительно корпуса. При повороте педалей система управления тормозами, установленная полностью внутри корпуса и соединенная с педальными узлами, через электрический разъем подает сигнал на тормозную систему с электродистанционным управлением. Система управления рулем направления размещена полностью внутри корпуса и является функционально независимой от системы управления тормозами. Система управления рулем направления обнаруживает продольное перемещение педальных узлов и через электрический разъем подает сигнал на рулевую систему с электродистанционным управлением. Корпус, электрические разъемы, педальные узлы, система управления тормозами и система управления рулем направления образуют единый модуль, который можно устанавливать в кабине экипажа и удалять из кабины как единый блок. Достигается компактная система, которую можно быстро и легко устанавливать на поверхности пола кабины для соединения с другими системами ЛА. 3 н. и 17 з.п. ф-лы, 24 ил. 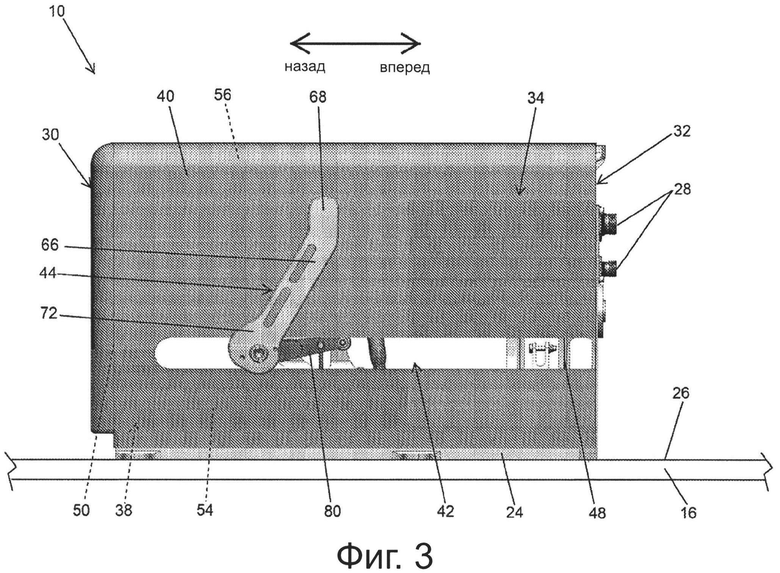
1. Модульная система управления тормозами и рулем направления, предназначенная для применения на летательном аппарате, имеющем кабину экипажа с полом и имеющем тормозную систему с электродистанционным управлением и рулевую систему с электродистанционным управлением, при этом модульная система управления тормозами и рулем направления содержит:
корпус с противоположными боковыми стенками, устанавливаемый полностью поверх пола кабины без прохождения сквозь пол при функциональном соединении модульной системы управления тормозами и рулем направления с тормозной и рулевой системами, имеющими электродистанционное управление,
электрические разъемы, соединенные с корпусом и функционально соединяемые с тормозной и рулевой системами, имеющими электродистанционное управление,
два педальных узла, соединенных с корпусом и выступающих от боковых сторон, причем каждый педальный узел содержит задействуемую оператором ножную педаль, при этом каждый педальный узел выполнен с возможностью независимого поворота относительно своей оси поворота при воздействии оператора, причем каждый педальный узел выполнен с возможностью перемещения в продольном направлении относительно корпуса,
систему управления тормозами, расположенную полностью внутри корпуса и соединенную с педальными узлами, причем система управления тормозами содержит первый датчик перемещений, функционально соединенный с по меньшей мере первым из педальных узлов и с по меньшей мере первым из электрических разъемов, соединенным с тормозной системой, имеющей электродистанционное управление, при этом первый датчик перемещений выполнен с возможностью обнаружения поворотного движения педального узла и подачи первого сигнала через первый электрический разъем на тормозную систему с электродистанционным управлением для ее активации в соответствии с величиной или скоростью поворотного перемещения педального узла,
систему управления рулем направления, расположенную полностью внутри корпуса и функционально независимую от системы управления тормозами, причем система управления рулем направления содержит второй датчик перемещений, функционально соединенный с педальными узлами независимо от первого датчика и соединенный со вторым из электрических разъемов, который соединен с рулевой системой, имеющей электродистанционное управление, при этом второй датчик перемещений выполнен с возможностью обнаружения перемещения педальных узлов в продольном направлении и подачи второго сигнала через второй электрический разъем на рулевую систему с электродистанционным управлением для ее активации в зависимости от продольного перемещения педального узла относительно корпуса, и
систему регулировки положения, функционально не зависящую от системы управления тормозами и системы управления рулем направления, причем система регулировки положения соединена с педальными узлами и служит для одновременного перемещения педальных узлов в одном и том же направлении для изменения их положения в продольном направлении относительно корпуса между передним и задним положениями.
2. Система по п.1, в которой корпус содержит раму и устанавливаемый над рамой кожух, причем рама является устанавливаемой на верхней поверхности пола кабины экипажа без прохождения сквозь пол, при этом на раме смонтированы система управления тормозами, система управления рулем направления и система регулировки положения в виде единого модуля.
3. Система по п.1, в которой корпус, педальные узлы, система управления тормозами, система управления рулем направления и система регулировки положения образуют единый модуль, съемным образом устанавливаемый на верхней поверхности пола кабины экипажа.
4. Система по п.3, в которой кабина экипажа содержит рабочее место первого пилота и рабочее место второго пилота, причем указанный единый модуль выполнен с возможностью взаимозаменяемой установки как на рабочем месте первого пилота, так и на рабочем месте второго пилота.
5. Система по п.1, в которой педальные узлы являются первыми педальными узлами, а система управления рулем направления является первой системой управления рулем направления, и дополнительно содержит связующий элемент, соединенный с первой системой управления рулем направления, причем связующий элемент выполнен с возможностью соединения со второй системой управления рулем направления рядом расположенной второй модульной системы управления тормозами и рулем направления, причем связующий элемент выполнен с возможностью преобразования продольного перемещения педальных узлов первой системы управления рулем направления в продольное перемещение вторых педальных узлов второй системы управления рулем направления второй модульной системы управления тормозами и рулем направления.
6. Система по п.1, в которой корпус содержит раму, на которой смонтированы система управления тормозами, система управления рулем направления и система регулировки положения, при этом корпус содержит расположенный поверх рамы кожух, имеющий противоположные боковые стенки с выполненными в них удлиненными пазами, причем указанные педальные узлы выступают из данных пазов и имеют возможность перемещения в продольном направлении вдоль пазов.
7. Система по п.1, в которой система управления тормозами содержит тормозной рычаг, соединяющий первый датчик перемещения и первый из педальных узлов, при этом тормозной рычаг и первый из педальных узлов выполнены с возможностью поворота как единое целое относительно корпуса, причем тормозной рычаг выполнен с возможностью передачи перемещения первого из педальных узлов на первый датчик перемещения.
8. Система по п.7, в которой первый датчик перемещения представляет собой датчик линейных перемещений, выполненный с возможностью определения величины и скорости перемещения тормозного рычага при повороте первого из педальных узлов и генерирования сигнала управления тормозами, соответствующего величине и скорости перемещения тормозного рычага.
9. Система по п.1, в которой система управления рулем направления содержит педальный соединительный узел с приводным валом руля направления, соединенным с педальными узлами и установленным с возможностью вращения в корпусе, при этом вращение приводного вала руля направления соответствует продольному перемещению каждого педального узла относительно корпуса на равные расстояния в противоположных направлениях.
10. Система по п.9, в которой второй датчик перемещений представляет собой датчик вращательного движения, соединенный с приводным валом руля направления и выполненный с возможностью обнаружения вращательного движения приводного вала руля направления при продольном перемещении педальных узлов и генерирования сигнала управления рулем направления, соответствующего продольному перемещению педальных узлов.
11. Модульная система управления тормозами и рулем направления для использования на транспортном средстве, имеющем центр управления с полом и имеющем тормозную систему с электронным управлением и рулевую систему с электронным управлением, при этом модульная система управления тормозами и рулем направления содержит:
корпус, устанавливаемый в центре управления полностью поверх пола без прохождения сквозь пол при функциональном соединении данной модульной системы управления тормозами и рулем направления с тормозной и рулевой системами,
электрические разъемы, соединенные с корпусом и функционально соединяемые с тормозной и рулевой системами,
два педальных узла, выступающих из корпуса, причем каждый из педальных узлов содержит задействуемую оператором педаль, при этом каждый педальный узел выполнен с возможностью независимого поворота и перемещения в продольном направлении относительно корпуса,
систему управления тормозами, расположенную полностью внутри корпуса и соединенную с педальными узлами, причем система управления тормозами содержит первый датчик перемещений, функционально соединенный с по меньшей мере первым педальным узлом и с по меньшей мере первым из электрических разъемов, соединенным с тормозной системой, причем первый датчик перемещений выполнен с возможностью обнаружения первого перемещения педального узла и подачи первого сигнала через первый электрический разъем на тормозную систему для ее активации в соответствии с величиной первого перемещения педального узла, и
систему управления рулем направления, расположенную полностью внутри корпуса и функционально независимую от системы управления тормозами, причем система управления рулем направления содержит второй датчик перемещений, функционально соединенный с педальными узлами и со вторым из электрических разъемов, который соединен с рулевой системой, при этом второй датчик перемещений выполнен с возможностью обнаружения перемещения педальных узлов в продольном направлении и подачи второго сигнала через второй электрический разъем на рулевую систему в зависимости от продольного перемещения педального узла.
12. Система по п.11, которая дополнительно содержит систему регулировки положения, функционально независимую от системы управления тормозами и системы управления рулем направления, при этом система регулировки положения соединена с педальными узлами и служит для одновременного перемещения педальных узлов в одном и том же направлении для изменения их положения в продольном направлении относительно корпуса между передним и задним положениями.
13. Система по п.11, в которой корпус содержит раму и кожух, расположенный поверх рамы, при этом рама является устанавливаемой на верхней поверхности пола без прохождения сквозь пол, причем на раме смонтированы система управления тормозами и система управления рулем направления.
14. Система по п.11, в которой корпус, педальные узлы, система управления тормозами, система управления рулем направления и система регулировки положения образуют единый модуль, съемным образом устанавливаемый на верхней поверхности пола.
15. Система по п.14, в которой кабина экипажа содержит рабочее место первого пилота и рабочее место второго пилота, причем единый модуль выполнен с возможностью взаимозаменяемой установки как на рабочем месте первого пилота, так и на рабочем месте второго пилота.
16. Система по п.11, в которой система управления тормозами содержит тормозной рычаг, соединяющий первый датчик перемещения и первый из педальных узлов, при этом тормозной рычаг и первый из педальных узлов выполнены с возможностью поворота как единое целое относительно корпуса, причем тормозной рычаг выполнен с возможностью передачи перемещения первого из педальных узлов на первый датчик перемещения.
17. Система по п.11, в которой система управления рулем направления содержит педальный соединительный узел с приводным валом руля направления, соединенным с педальными узлами, при этом вращение приводного вала руля направления соответствует продольному перемещению каждого педального узла относительно корпуса на равные расстояния в противоположных направлениях.
18. Модульная система управления тормозами и рулем направления для применения на летательном аппарате, имеющем кабину экипажа с полом и имеющем тормозную систему с электродистанционным управлением и рулевую систему с электродистанционным управлением, при этом модульная система управления тормозами и рулем направления содержит:
корпус, содержащий раму и кожух, расположенный поверх рамы, причем рама является устанавливаемой с возможностью снятия на верхней поверхности пола кабины экипажа без прохождения сквозь пол при функциональном соединении указанной модульной системы управления тормозами и рулем направления с тормозной и рулевой системами,
электрические разъемы, соединенные с корпусом и функционально соединяемые с тормозной и рулевой системами,
два педальных узла, соединенных с корпусом, причем каждый из педальных узлов выполнен с возможностью поворота и перемещения в продольном направлении относительно корпуса,
систему управления тормозами, расположенную полностью внутри корпуса и смонтированную на раме, причем система управления тормозами соединена с педальными узлами и с по меньшей мере первым из электрических разъемов, соединенным с тормозной системой, при этом система управления тормозами выполнена с возможностью обнаружения поворотного движения педального узла и выдачи первого сигнала через первый электрический разъем на тормозную систему для ее активации, и
систему управления рулем направления, расположенную полностью внутри корпуса и смонтированную на раме, причем система управления рулем направления соединена с педальными узлами и является функционально независимой от системы управления тормозами, при этом система управления рулем направления соединена с по меньшей мере вторым из электрических разъемов, соединенным с рулевой системой, причем система управления рулем направления выполнена с возможностью обнаружения продольного движения педальных узлов и подачи второго сигнала через второй электрический разъем на рулевую систему,
при этом корпус, электрические разъемы, педальные узлы, система управления тормозами и система управления рулем направления образуют единый модуль, устанавливаемый в кабине экипажа и удаляемый из кабины как единый блок.
19. Система по п.18, которая дополнительно содержит систему регулировки положения, функционально независимую от системы управления тормозами и системы управления рулем направления, при этом система регулировки положения соединена с педальными узлами и служит для одновременного перемещения педальных узлов в одном и том же направлении для изменения их положения в продольном направлении относительно корпуса.
20. Система по п.19, которая дополнительно содержит связующий элемент, соединенный с системой управления рулем направления, причем связующий элемент соединен со второй системой управления рулем направления рядом расположенной второй модульной системы управления тормозами и рулем направления, причем связующий элемент выполнен с возможностью преобразования продольного перемещения педальных узлов в продольное перемещение вторых педальных узлов и второй системы управления рулем направления второй модульной системы управления тормозами и рулем направления.
| US 5056742 A, 15.10.1991 | |||
| FR 2956756 A1, 26.08.2011 | |||
| US 5148152 A, 15.09.1992 | |||
| УСТРОЙСТВО ДЛЯ НОЖНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2177896C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |

