Предпосылки к созданию изобретения
Известно, что механизм рычага управления может быть установлен на колпаке тележки для погрузки-разгрузки материалов. Механизм рычага управления содержит множество рычагов управления, каждый из которых выполнен из трубчатого материала и согнут при помощи гибочного устройства в соответствующих местах, чтобы придать рычагу желательную конфигурацию. Операция гибки трубчатого материала является дорогостоящей. Кроме того, диаметр трубчатого материала вблизи от конца, то есть там, где закреплена рукоятка, должен быть уменьшен. Эта операция уменьшения диаметра также является дорогостоящей. Рычаги, изготовленные из трубчатого материала, обычно устанавливают на колпаке тележки с использованием отливок, которые соединяют болтами с рычагами. Так как установленные на колпаке рычаги являются длинными, любые ошибки монтажа между соединенными болтами отливками и рычагами будут нежелательным образом изменять промежутки между рукоятками на противоположных концах рычагов.
Уже известна лазерная резка установленных на полу рычагов управления. Однако такие рычаги имеют намного меньшую длину, чем установленные на колпаке рычаги управления.
В связи с изложенным желательно создать усовершенствованный механизм рычага управления, приспособленный к установке на колпаке тележки для погрузки-разгрузки материалов.
Сущность изобретения
В соответствии с настоящим изобретением предлагается усовершенствованный механизм рычага управления, приспособленный к установке на колпаке тележки для погрузки-разгрузки материалов. Этот механизм содержит рычаги управления, выполненные так, чтобы максимально увеличить зону наблюдения оператора. Рычаги управления могут быть установлены с использованием бобышек, приваренных к рычагам. Преимущественно палец пропускают через отверстия в бобышках и через отверстия в кронштейне, чтобы установить рычаги управления на колпаке тележки. Следовательно, соединение болтами с отливками можно не использовать для установки рычагов управления на колпаке тележки. Кроме того, рычаги управления могут быть отрезаны лазером от металлического листа. Следовательно, можно исключить дорогие операции гибки для образования изгибов в трубчатом материале.
В соответствии с первым аспектом настоящего изобретения предлагается механизм рычага управления, приспособленный к установке на колпаке основного корпуса тележки для погрузки-разгрузки материалов. Механизм рычага управления может содержать по меньшей мере одну рычажную конструкцию, которая содержит рычаг управления, имеющий секцию, которая находится в самой нижней плоскости наблюдения зоны наблюдения оператора или ориентировочно параллельна этой плоскости, причем зона наблюдения оператора содержит по меньшей мере одну плоскость наблюдения, расположенную над самой нижней плоскостью наблюдения, и устройство для установки рычажной конструкции на колпаке основного корпуса.
Рычаг управления может иметь первую, вторую, третью и четвертую секции. Третья секция находится в самой нижней плоскости наблюдения или ориентировочно параллельна ей.
Первая и вторая секции могут пересекаться с образованием первого тупого угла, вторая и третья секции могут пересекаться с образованием второго тупого угла, а третья и четвертая секции могут пересекаться с образованием третьего тупого угла, причем вторая, третья и четвертая секции могут иметь ориентировочно U-образную форму.
Четвертая секция может иметь участок захвата оператором.
Первая боковая поверхность рычага управления может быть расположена в первой плоскости, а вторая боковая поверхность рычага управления может быть расположена во второй плоскости, которая в целом параллельна первой плоскости.
Рычажная конструкция может дополнительно содержать опорный элемент, соединенный с концом рычага управления. Опорный элемент может иметь лицевую поверхность, расположенную в плоскости, которая расположена под углом к плоскости, содержащей боковую поверхность рычага. Опорный элемент может иметь бобышку, соединенную с рычагом управления. Конец рычага управления может иметь отверстие. Бобышка может проходить по меньшей мере частично через отверстие и может быть приварена к концу рычага управления.
Узел рычага может дополнительно содержать удлинительный элемент, соединенный с концом рычага управления. Удлинительный элемент может быть соединен с рычажной передачей клапана и может иметь боковую стенку, параллельную лицевой поверхности опорного элемента.
Опорный элемент может иметь отверстие, а устройство для установки рычажной конструкции на колпаке основного корпуса может иметь кронштейн, соединенный с колпаком основного корпуса, и палец, проходящий через отверстие в опорном элементе и через отверстия в кронштейне.
По меньшей мере одна рычажная конструкция может содержать первую и вторую рычажные конструкции. Первая рычажная конструкция может содержать первый рычаг управления, имеющий секцию, которая находится в самой нижней плоскости наблюдения или ориентировочно параллельна ей, а вторая рычажная конструкция может содержать второй рычаг управления, имеющий секцию, которая находится в самой нижней плоскости наблюдения или ориентировочно параллельна ей.
Первая рычажная конструкция может дополнительно содержать первый опорный элемент, соединенный с концом первого рычага управления. Первый опорный элемент может иметь первую лицевую поверхность, расположенную под первым углом к плоскости, содержащей боковую поверхность первого рычага. Вторая рычажная конструкция может дополнительно содержать второй опорный элемент, соединенный с концом второго рычага управления. Второй опорный элемент может иметь вторую лицевую поверхность, расположенную под вторым углом к плоскости, содержащей боковую поверхность второго рычага. Второй угол может быть больше первого угла.
Каждый из первого и второго рычагов управления может иметь первую, вторую, третью и четвертую секции. Третья секция находится в самой нижней плоскости наблюдения или ориентировочно параллельна ей.
Четвертая секция второго рычага управления может иметь длину, превышающую длину четвертой секции первого рычага управления.
Первый и второй рычаги управления могут быть отрезаны лазером от сплошного, в целом плоского листа металла.
В соответствии со вторым аспектом настоящего изобретения предлагается механизм рычага управления, приспособленный к установке на колпаке основного корпуса тележки для погрузки-разгрузки материалов. Механизм рычага управления может иметь по меньшей мере одну рычажную конструкцию, которая содержит рычаг управления, имеющий первую, вторую, третью и четвертую секции. Вторая, третья и четвертая секции могут иметь ориентировочно U-образную форму. Четвертая секция может иметь участок захвата оператором. Механизм рычага управления может дополнительно содержать устройство для установки рычажной конструкции на колпаке основного корпуса.
Рычажная конструкция может дополнительно содержать опорный элемент, соединенный с концом рычага управления, имеющий лицевую поверхность, расположенную в плоскости, которая расположена под углом к плоскости, содержащей боковую поверхность рычага управления.
В соответствии с третьим аспектом настоящего изобретения предлагается механизм рычага управления, приспособленный к установке на колпаке основного корпуса тележки для погрузки-разгрузки материалов. Механизм рычага управления может иметь по меньшей мере одну рычажную конструкцию, которая содержит рычаг управления и опорный элемент, соединенный с концом рычага управления. Опорный элемент может иметь лицевую поверхность, расположенную в плоскости, которая расположена под углом к плоскости, содержащей боковую поверхность рычага управления. Механизм рычага управления может дополнительно содержать устройство для установки рычажной конструкции на колпаке основного корпуса.
Опорный элемент может иметь бобышку, соединенную с рычагом управления. Конец рычага управления может иметь отверстие, а бобышка может проходить по меньшей мере частично через указанное отверстие и может быть приварена к концу рычага управления.
Узел рычага может дополнительно содержать удлинительный элемент, соединенный с концом рычага управления и выполненный с возможностью соединения с рычажной передачей клапана. Удлинительный элемент может иметь боковую стенку, параллельную лицевой поверхности опорного элемента.
По меньшей мере одна рычажная конструкция может содержать первую и вторую рычажные конструкции, имеющие соответственно первый и второй рычаги управления. Первая рычажная конструкция может дополнительно содержать первый опорный элемент, соединенный с концом первого рычага управления. Первый опорный элемент может иметь первую лицевую поверхность, расположенную под первым углом к плоскости, содержащей боковую поверхность первого рычага. Вторая рычажная конструкция может дополнительно содержать второй опорный элемент, соединенный с концом второго рычага управления. Второй опорный элемент может иметь вторую лицевую поверхность, расположенную под вторым углом к плоскости, содержащей боковую поверхность второго рычага. Второй угол может быть больше первого угла.
Краткое описание чертежей
На фиг.1 показан вид сбоку тележки для погрузки-разгрузки материалов, которая содержит механизм рычага управления, сконструированный в соответствии с настоящим изобретением.
На фиг.1А показан вид в перспективе механизма рычага управления.
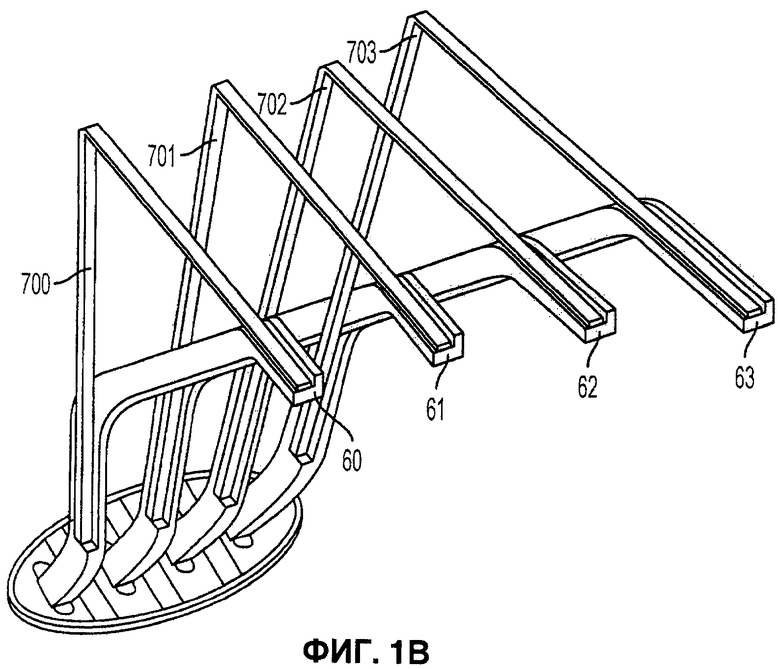
На фиг.1В показан вид в перспективе рычагов управления механизма рычага управления, показанного на фиг.1 и 1А, и других рычагов управления, которые имеют первую и вторую секции, идущие под углом 90 градусов друг к другу.
На фиг.2 показан вид в перспективе механизма рычага управления и клапанного устройства тележки, показанной на фиг.1.
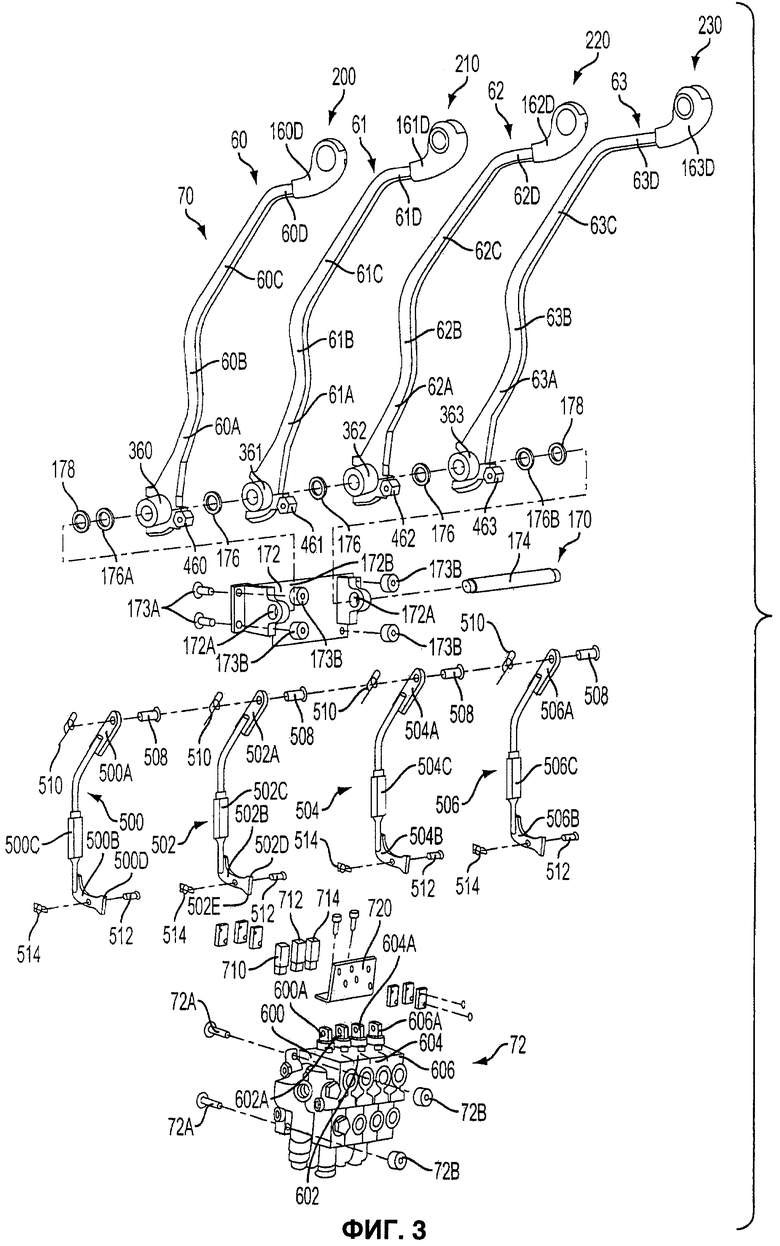
На фиг.3 показано перспективное изображение с пространственным разделением деталей механизма рычага управления и клапанного устройства, показанных на фиг.2.
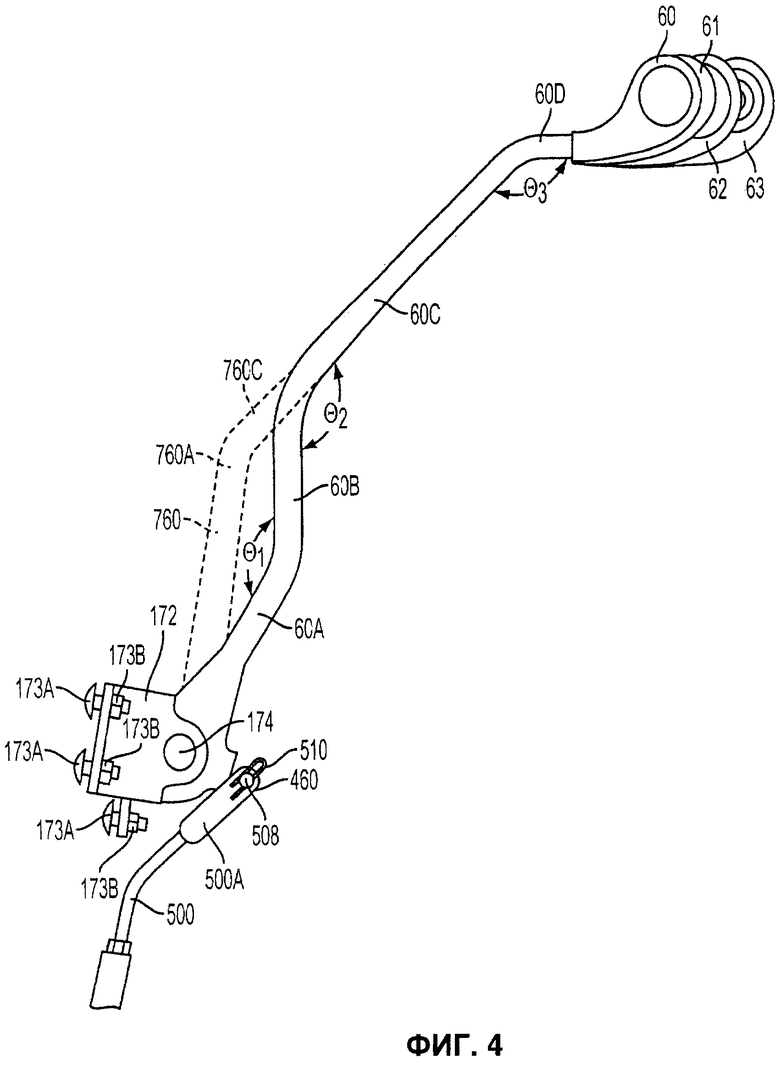
На фиг.4 показан вид сбоку механизма рычага управления.
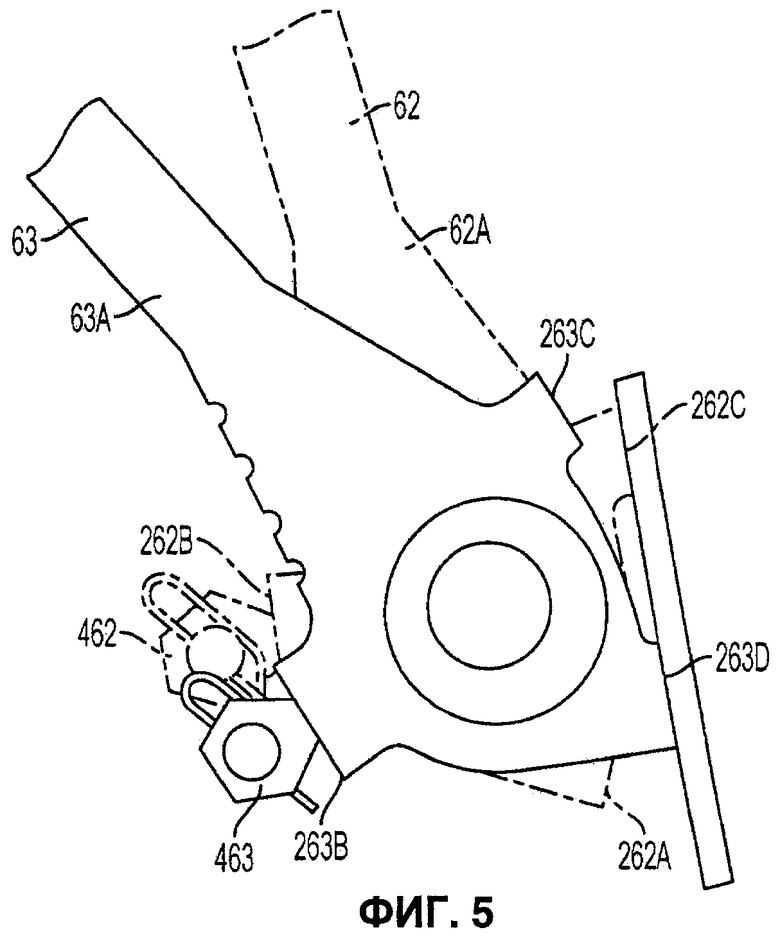
На фиг.5 показан вид сбоку первых секций рычагов управления и кронштейна, на котором установлены рычаги управления, причем одна секция рычага управления показана пунктиром.
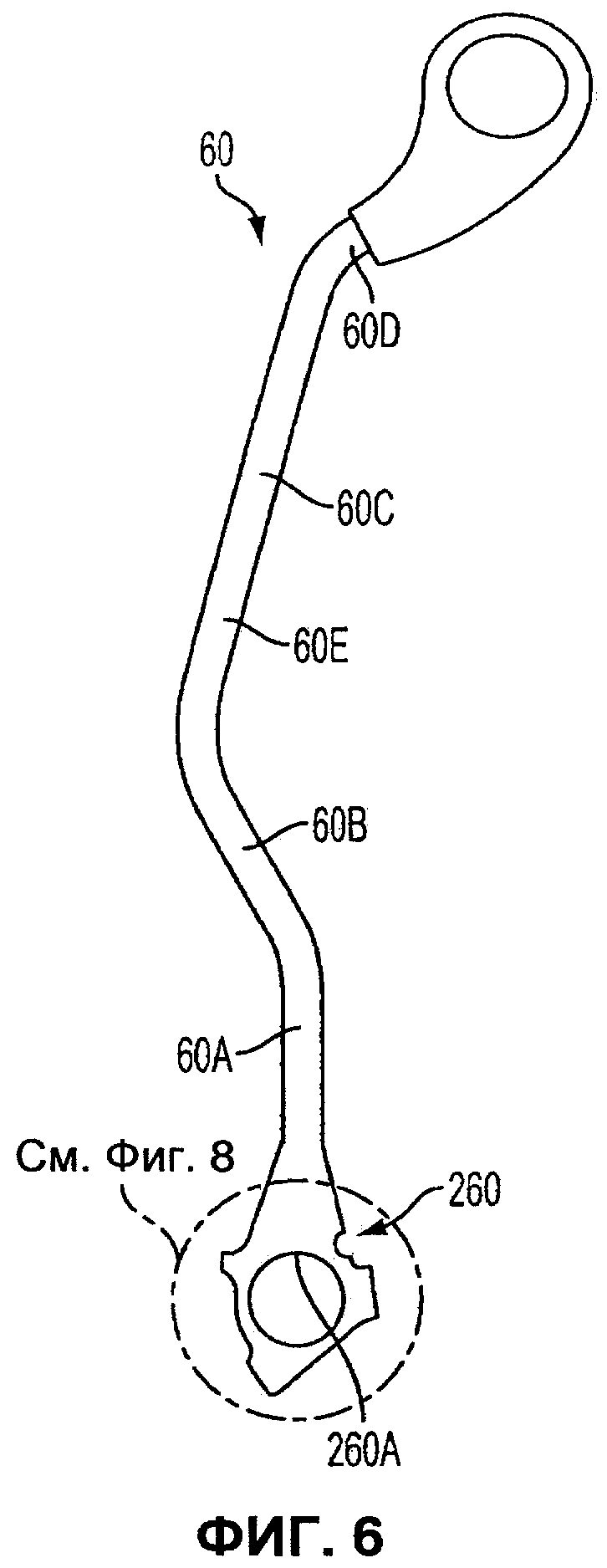
На фиг.6 показан вид сбоку первого рычага управления.
На фиг.7 показан вид первого рычага управления, в котором первый рычаг управления повернут из положения, показанного на фиг.6.
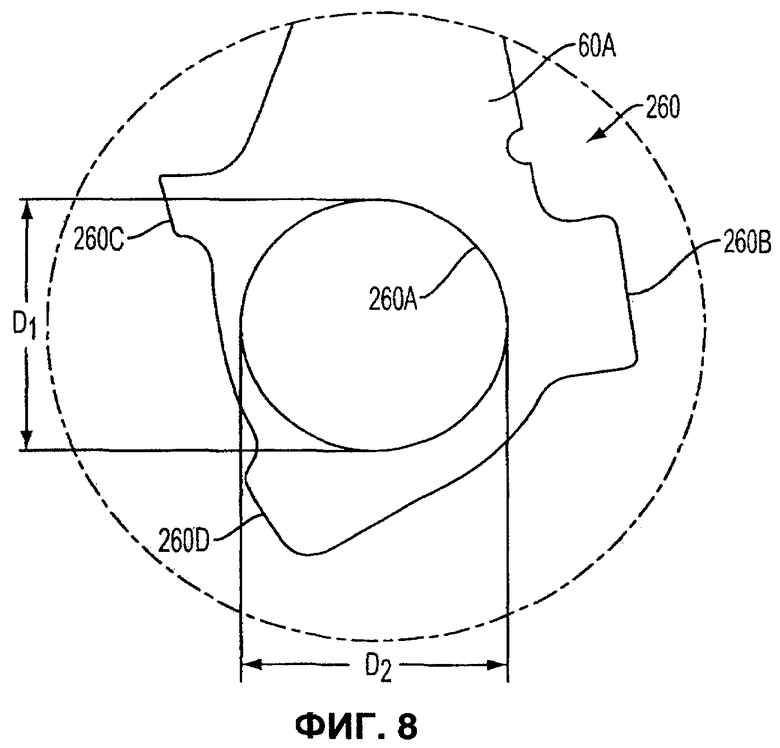
На фиг.8 показан с увеличением конец первой секции первого рычага управления.
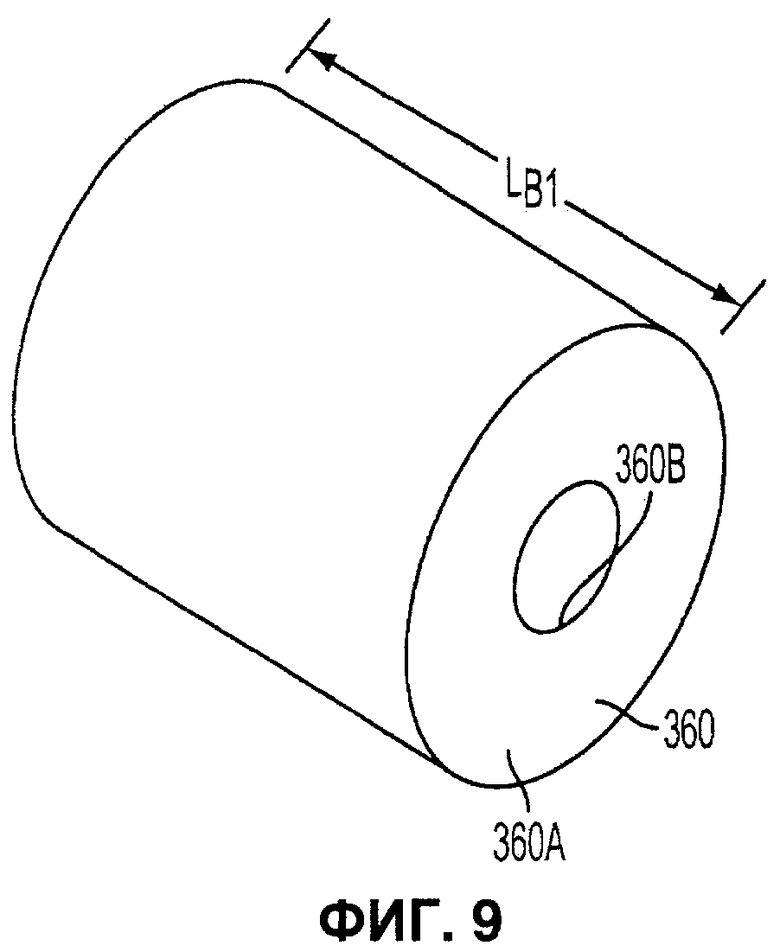
На фиг.9 показан вид в перспективе бобышки, вводимой в отверстие, предусмотренное на конце первой секции первого рычага управления, которая (бобышка) должна быть приварена к первому рычагу управления.
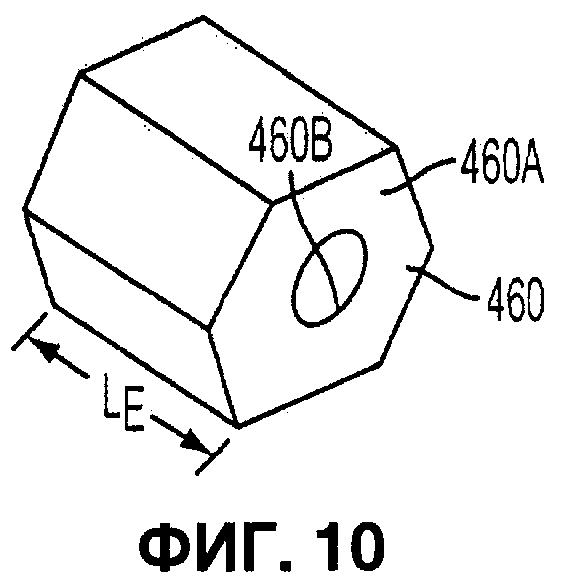
На фиг.10 показан вид в перспективе первого удлинительного элемента, который приваривают к концу первой секции первого рычага управления.
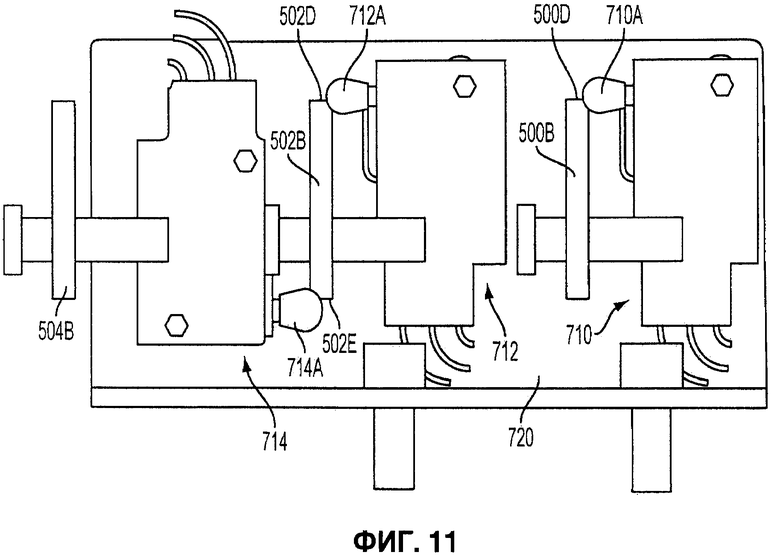
На фиг.11 показаны первый, второй и третий микропереключатели клапанного устройства тележки, показанной на фиг.1.
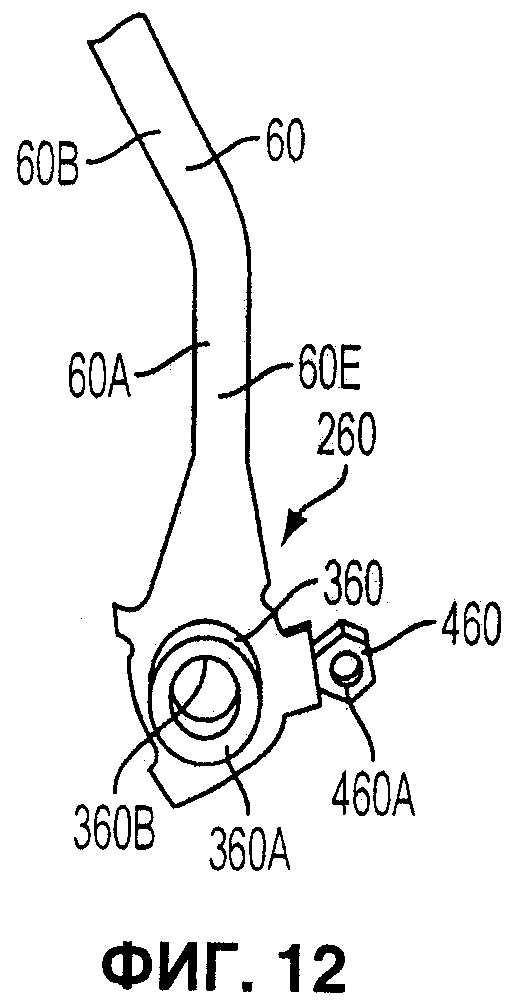
На фиг.12 показан вид сбоку первой секции первого рычага управления и соответствующих бобышки и удлинительного элемента.
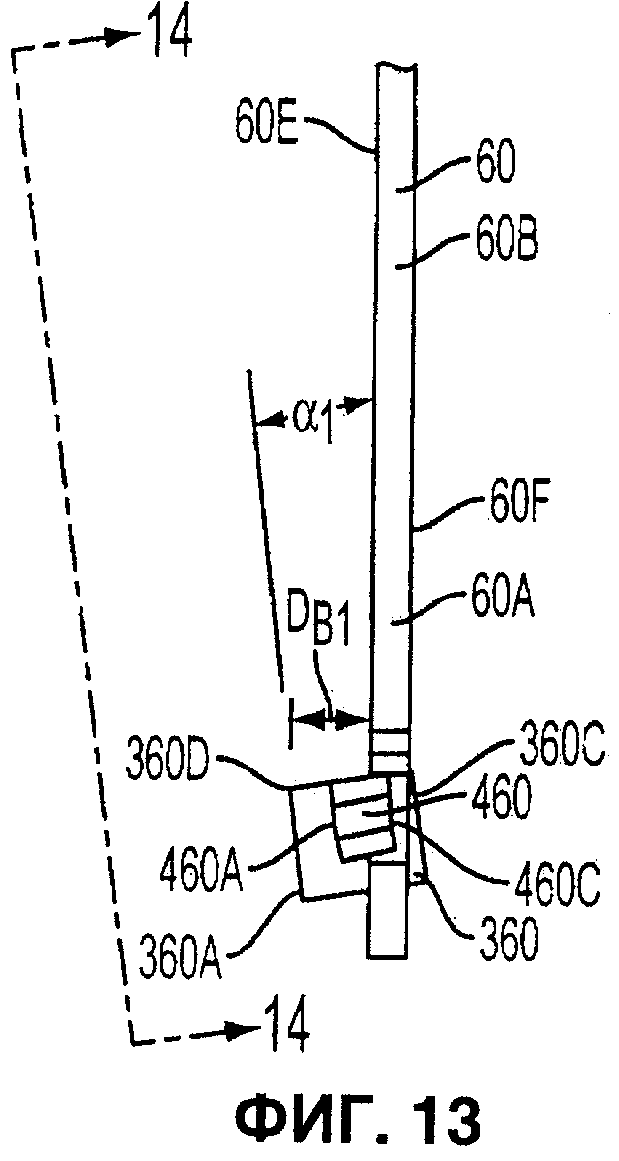
На фиг.13 показан вид первой секции первого рычага управления и соответствующих бобышки и удлинительного элемента, повернутых из положения, показанного на фиг.12.
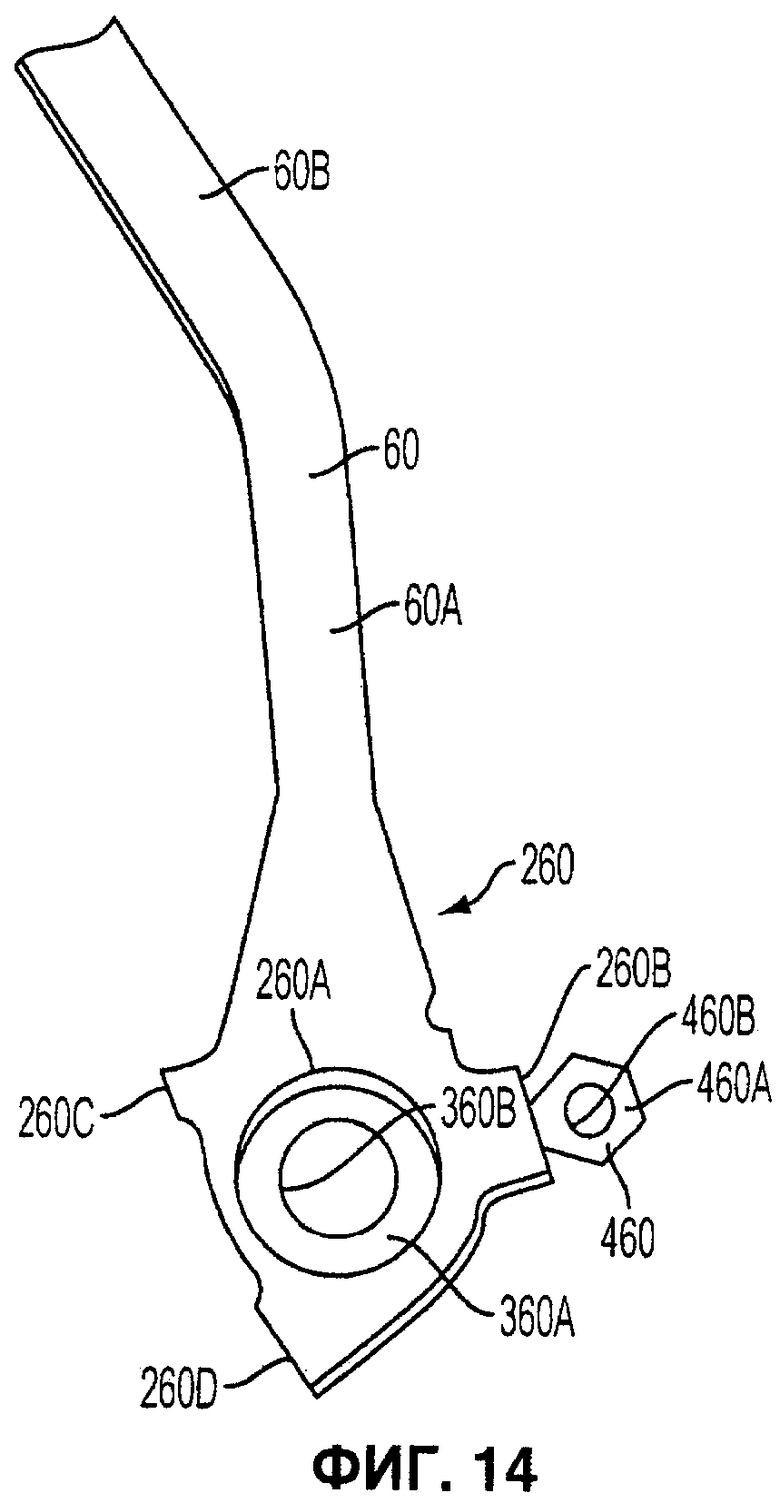
На фиг.14 показан вид по линии 14-14 на фиг.13.
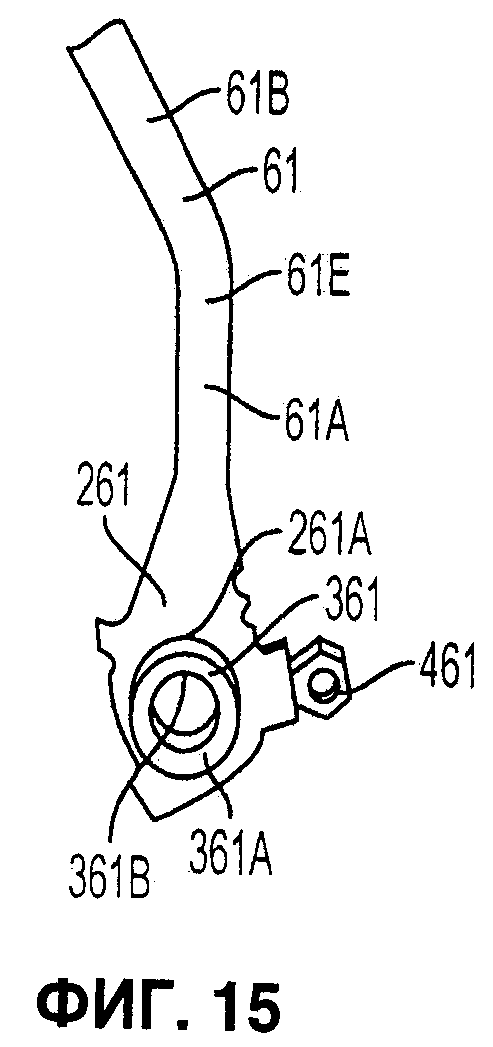
На фиг.15 показан вид сбоку первой секции второго рычага управления и соответствующих бобышки и удлинительного элемента.
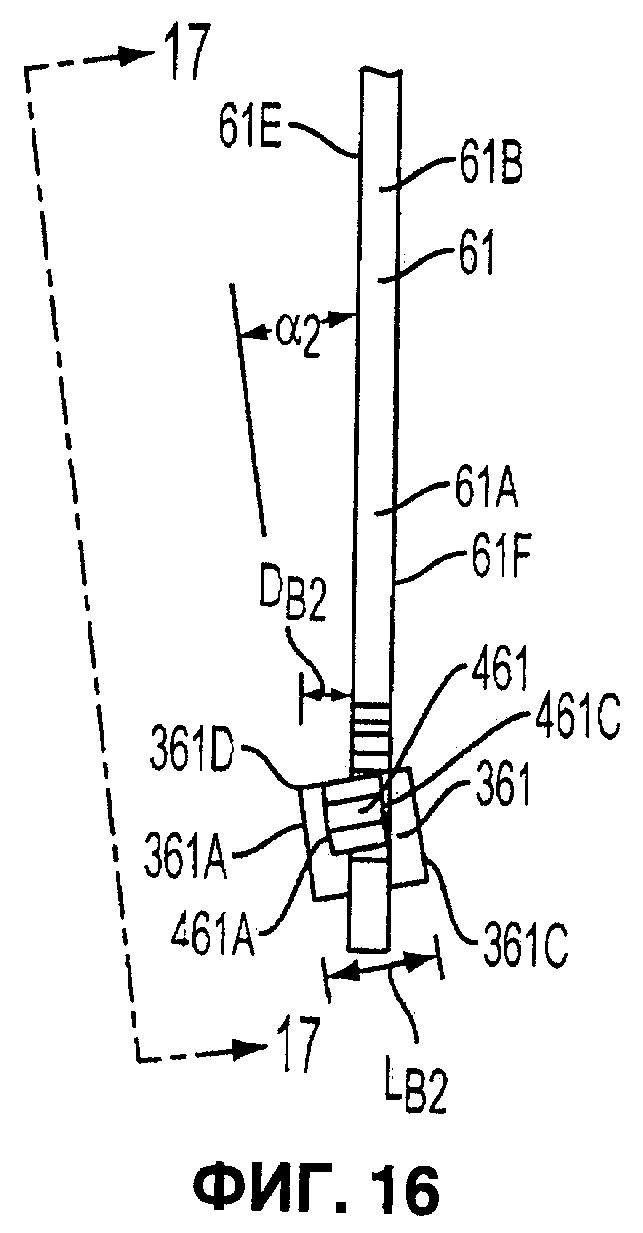
На фиг.16 показан вид первой секции второго рычага управления и соответствующих бобышки и удлинительного элемента, повернутых из положения, показанного на фиг.15.
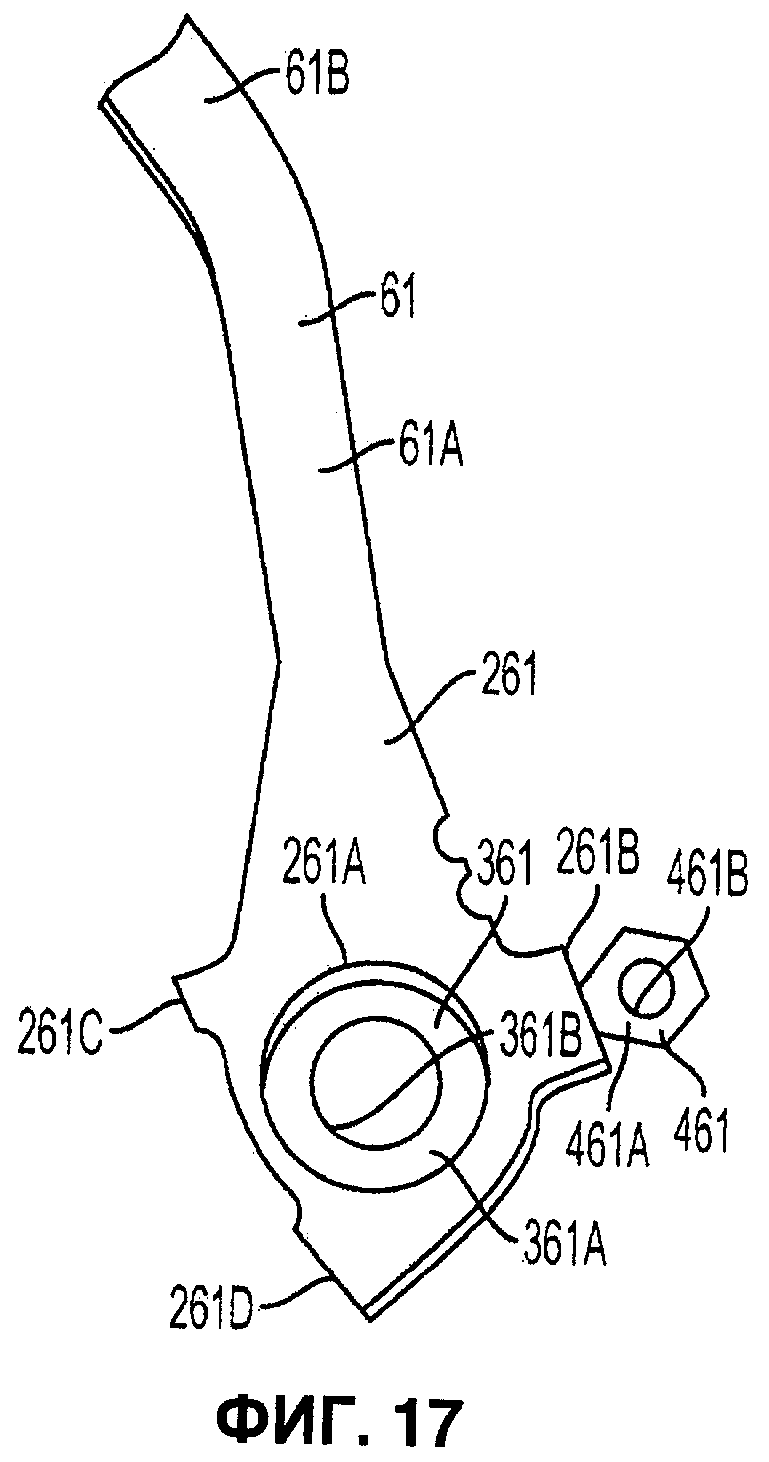
На фиг.17 показан вид по линии 17-17 на фиг.16.
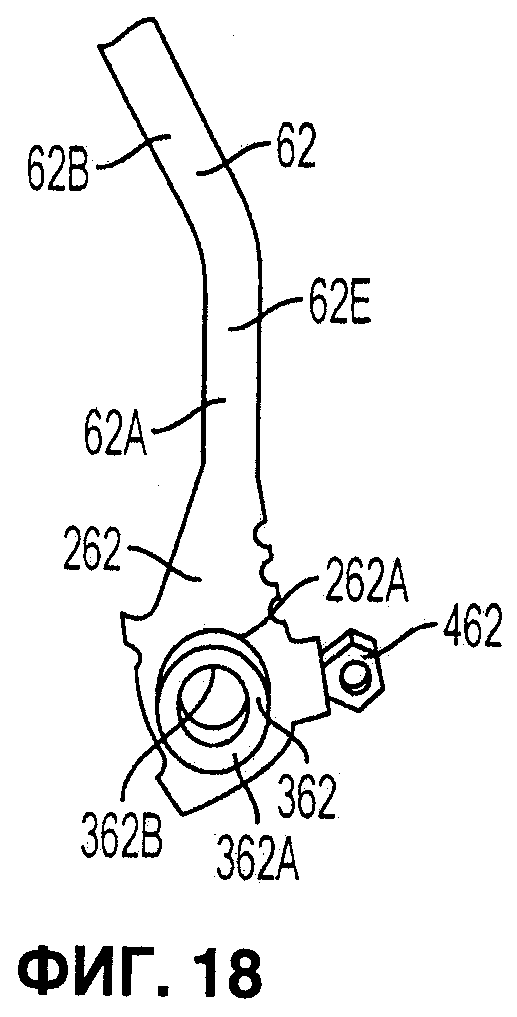
На фиг.18 показан вид сбоку первой секции третьего рычага управления и соответствующих бобышки и удлинительного элемента.
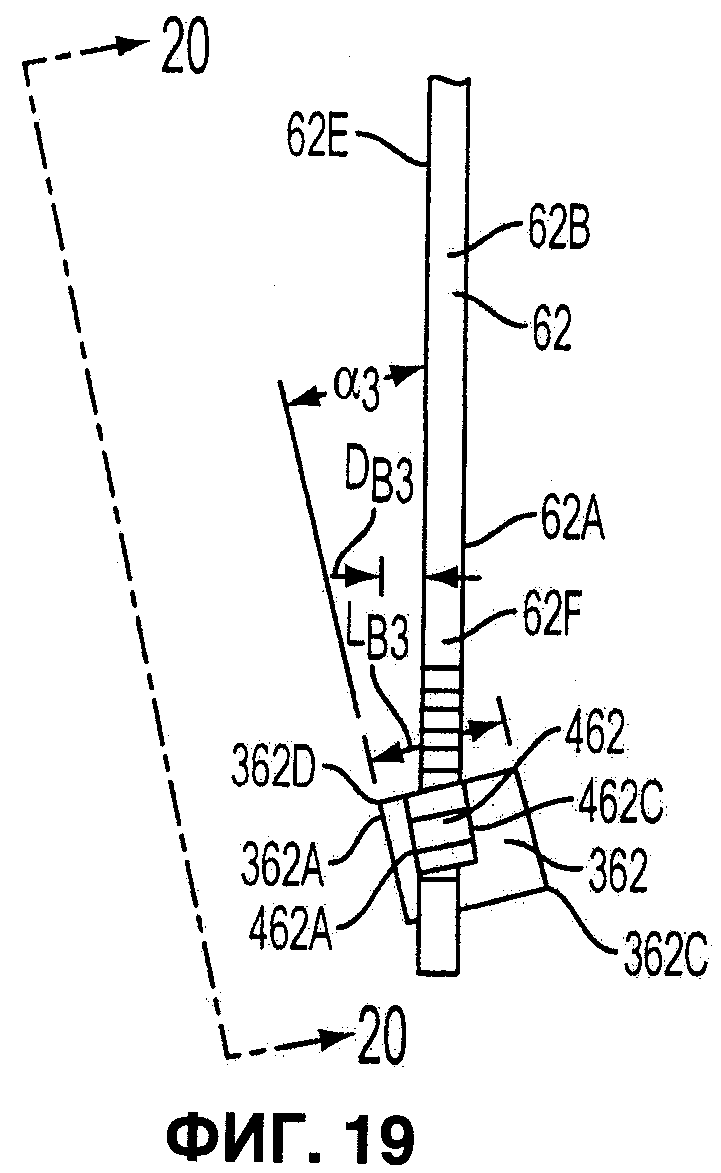
На фиг.19 показан вид первой секции третьего рычага управления и соответствующих бобышки и удлинительного элемента, повернутых из положения, показанного на фиг.18.
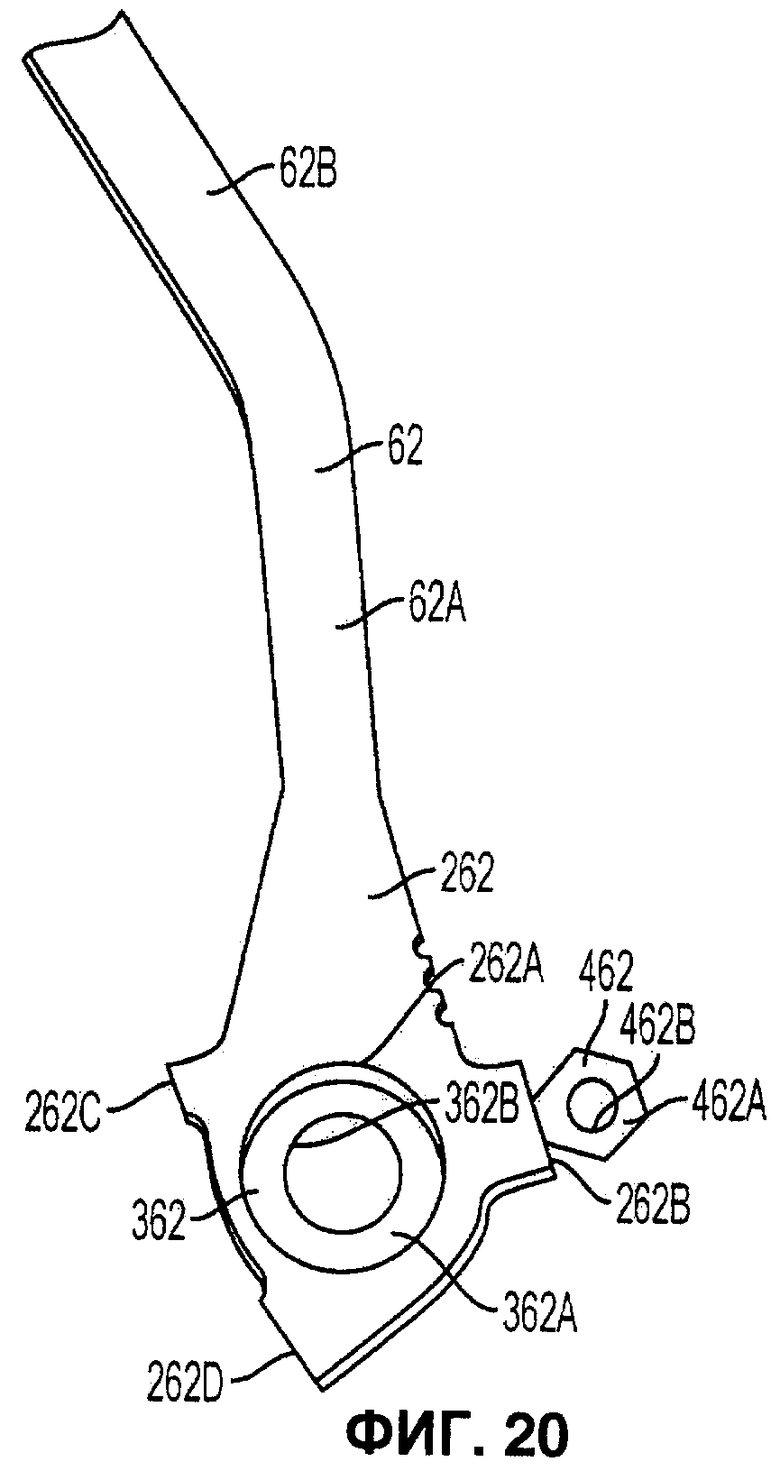
На фиг.20 показан вид по линии 20-20 на фиг.19.
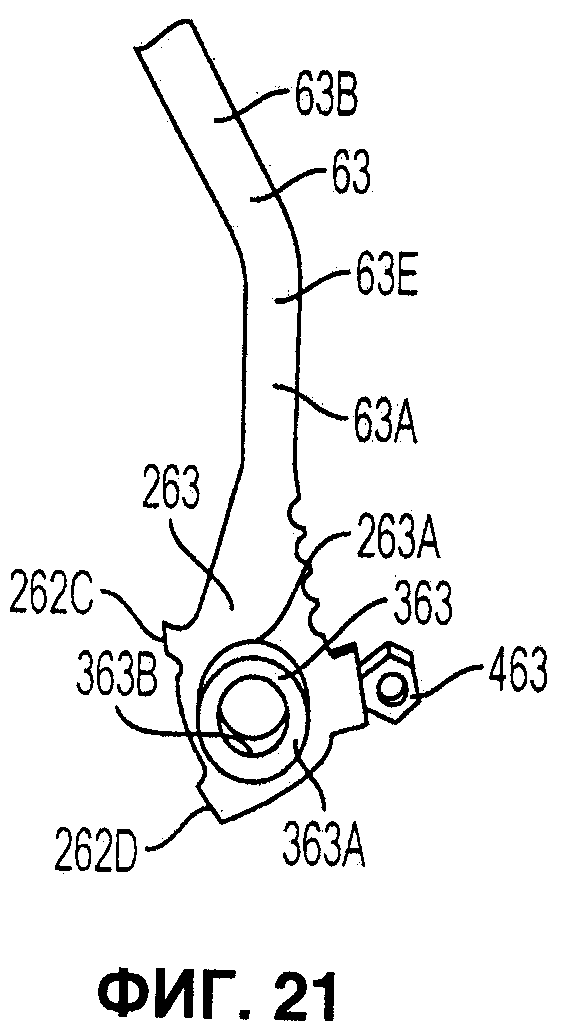
На фиг.21 показан вид сбоку первой секции четвертого рычаг управления и соответствующих бобышки и удлинительного элемента.
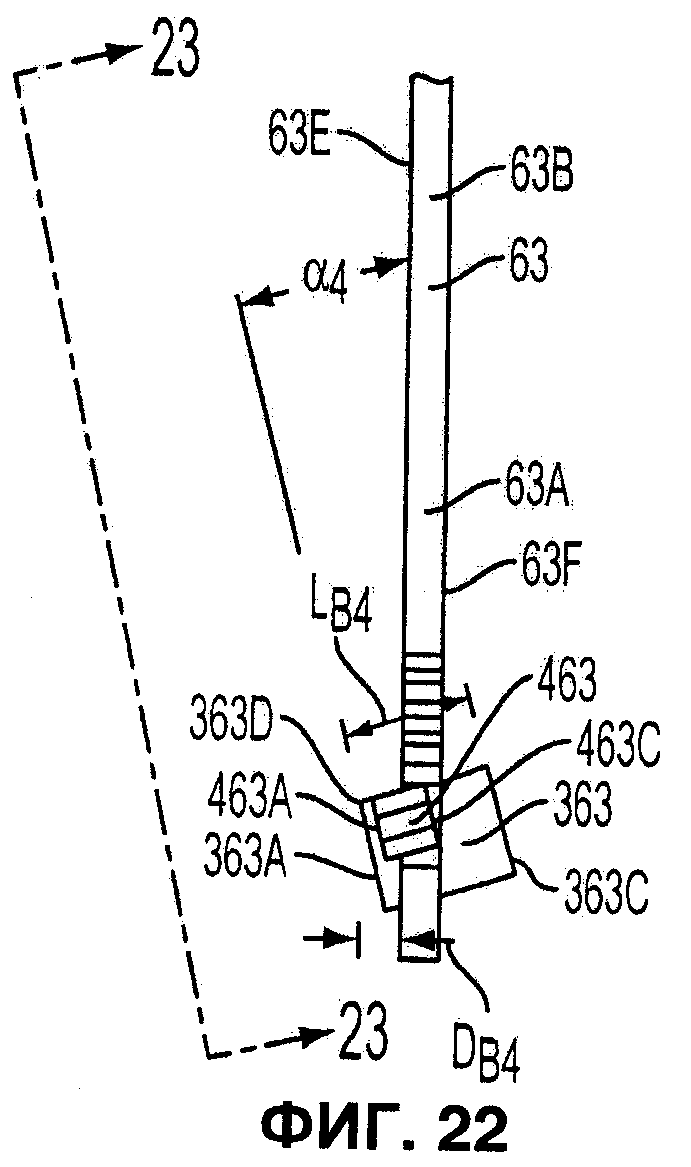
На фиг.22 показан вид первой секции четвертого рычага управления и соответствующих бобышки и удлинительного элемента, повернутых из положения, показанного на фиг.21.
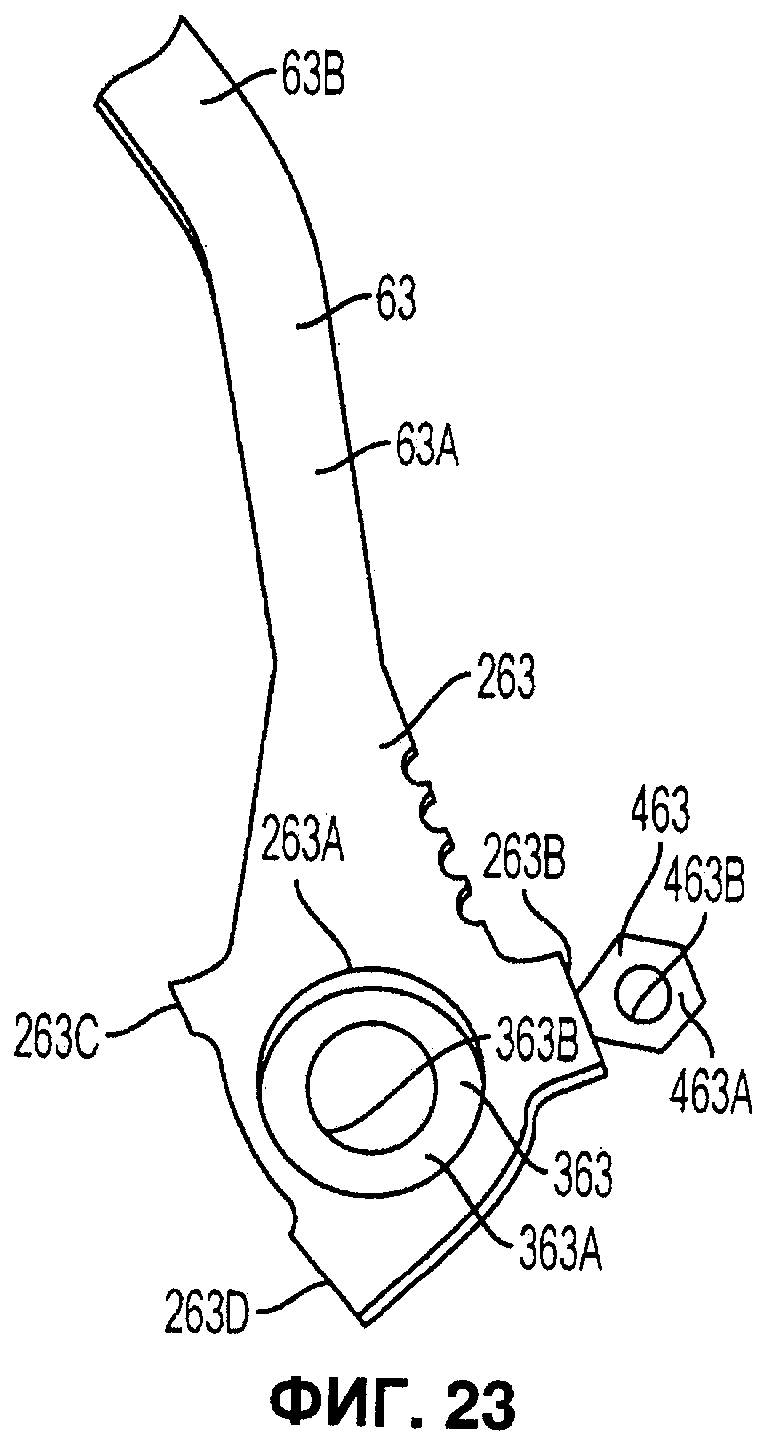
На фиг.23 показан вид по линии 23-23 на фиг.22.
Подробное описание изобретения
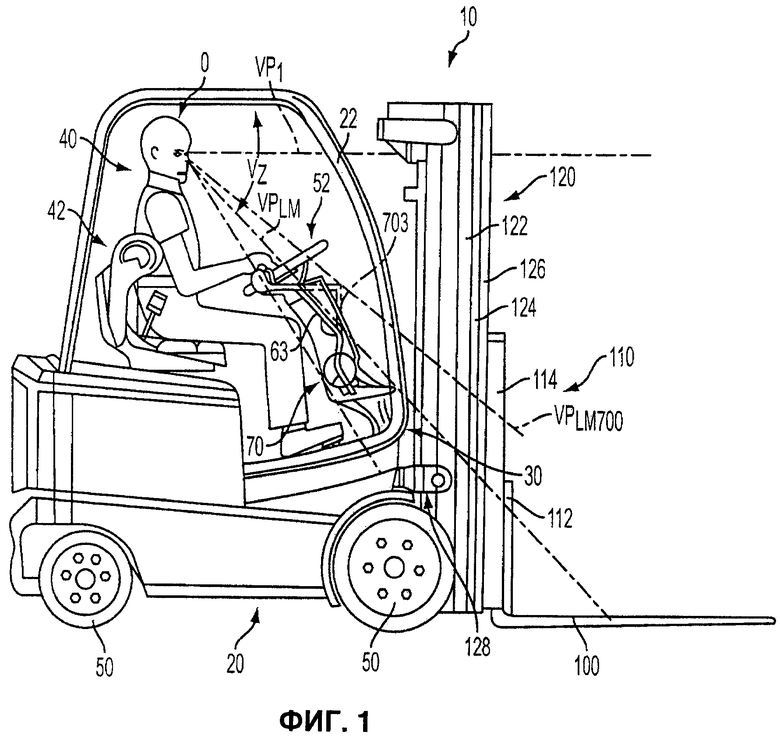
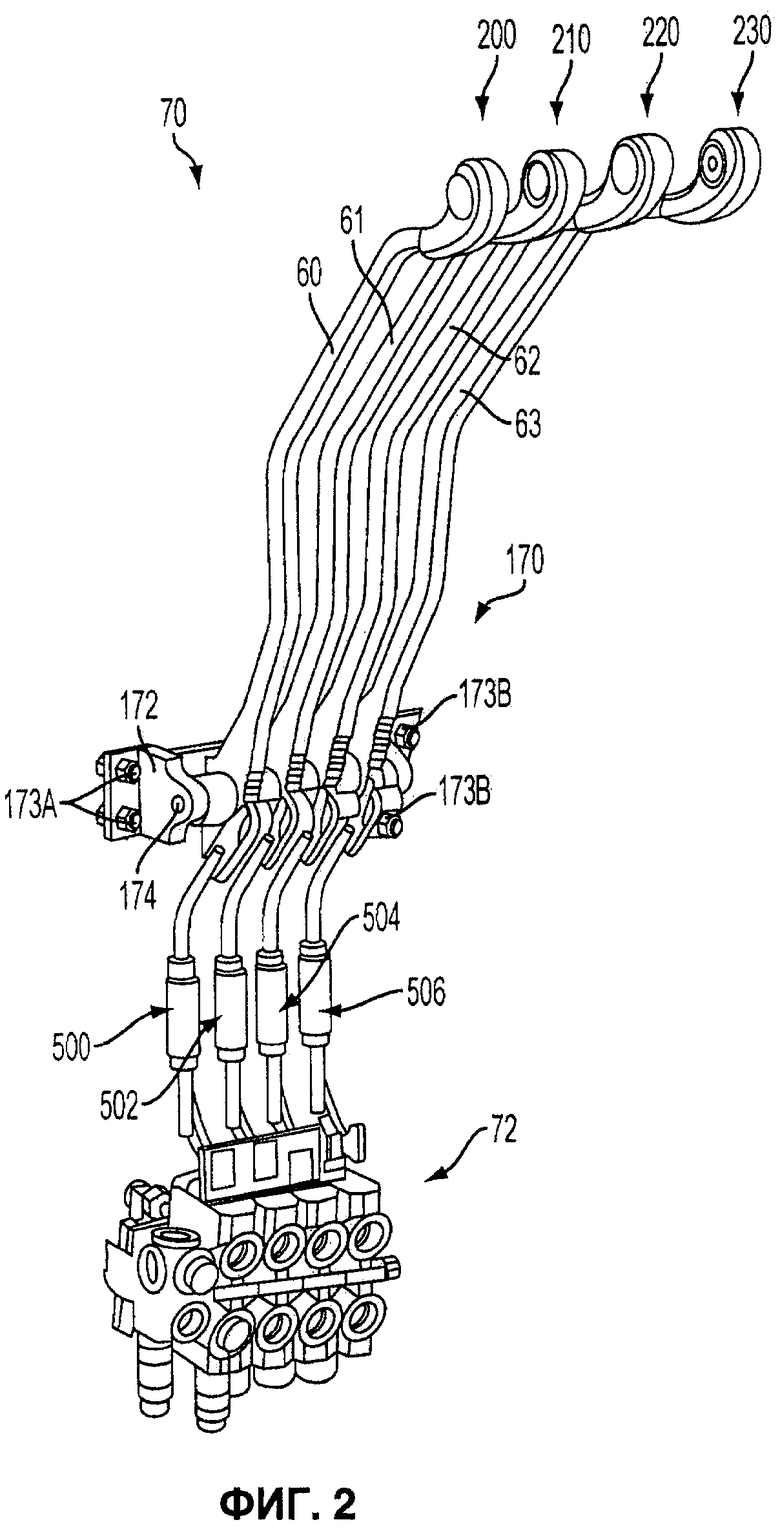
Обратимся теперь к рассмотрению фиг.1, на которой показана тележка 10 для погрузки-разгрузки материалов, которая содержит вилочный автопогрузчик. Тележка 10 содержит основной корпус или раму 20, имеющую колпак 30, расположенный впереди кабины 40 оператора и рядом со стойкой 22 в виде буквы А основного корпуса 20. Таким образом, колпак 30 представляет собой передний участок основного корпуса 20, расположенный впереди кабины 40 оператора и рядом со стойкой 22 в виде буквы А. Тележка 10 дополнительно содержит четыре колеса 50 (только два из которых показаны на фиг.1). По меньшей мере одно колесо 50 является ведомым и по меньшей мере одно колесо 50 является управляемым. Кабина 40 оператора содержит сиденье (кресло) 42 для оператора О. В кабине 40 оператора имеется рулевое колесо 52 для управления управляемым колесом (колесами). В кабине 40 оператора также имеются соответственно первый, второй, третий и четвертый рычаги 60-63 управления, которые являются частью механизма 70 рычага управления в соответствии с настоящим изобретением, см. фиг.1А. Механизм 70 рычага управления установлен на колпаке 30 основного корпуса 20. Механизм 70 рычага управления также соединен с клапанным устройством 72, см. фиг.2 и 3.
Два вилочных захвата 100 установлены на механизме 110 вилочной каретки, который содержит вилочную каретку 112 и опорную стенку 114 каретки. Вилочные захваты 100 соединены с вилочной кареткой 112, которая, в свою очередь, соединена с узлом 120 выдвижной (телескопической) мачты. Опорная стенка 114 каретки соединена с вилочной кареткой 112. Узел 120 мачты содержит поворотный мачтовый элемент 122, который не перемещается вертикально, и первый, и второй вложенные друг в друга мачтовые элементы 124 и 126, которые соединены с мачтовым элементом 122 и могут совершать вертикальное перемещение относительно него. Мачтовый элемент 122 шарнирно соединен с основным корпусом 20, в то время как вилочная каретка 112 соединена со вторым подвижным мачтовым элементом 126. Узел 120 мачты содержит множество гидроцилиндров (не показаны) для осуществления вертикального перемещения мачтовых элементов 124 и 126. Кроме того, блоки 128 гидроцилиндров/поршней (только один из которых показан на фиг.1) соединены с основным корпусом 20 и мачтовым элементом 122, для наклона мачтовых элементов 122, 124 и 126 в направлении приближения к тележке 10 и удаления от нее, относительно главным образом горизонтальной оси. В показанном варианте первое вспомогательное устройство (не показано) предусмотрено между мачтовым элементом 120 и механизмом 110 каретки для перемещения механизма 110 каретки и вилочных захватов 100 из стороны в сторону, то есть в направлении плоскости фиг.1 и в противоположном направлении, причем предусмотрено также второе вспомогательное устройство (не показано), которое может выполнять такую функцию, как изменение расстояния между вилочными захватами, то есть приближения вилочных захватов друг к другу или их дополнительной раздвижки друг от друга.
Обратимся теперь к рассмотрению фиг.2 и 3, где показан механизм 70 рычага управления, который содержит соответственно первую, вторую, третью и четвертую рычажные конструкции 200, 210, 220 и 230. Первая рычажная конструкция 200 содержит первый рычаг 60 управления. Первый рычаг 60 преимущественно получен за счет отрезки лазером от плоской стальной пластины и имеет соответственно первую, вторую, третью и четвертую секции 60A-60D, см. фиг.3 и 4. Как это показано на фиг.4, первая и вторая секции 60А и 60В пересекаются с образованием первого тупого угла Θ1, вторая и третья секции 60В и 60С пересекаются с образованием второго тупого угла Θ2, а третья и четвертая секции 60С и 60D пересекаются с образованием третьего тупого угла Θ3. Вторая, третья и четвертая секции 60В-60D первого рычага управления 60 имеют ориентировочно U-образную форму, см. фиг.3, 4 и 6. В показанном варианте первая рукоятка 160D, изготовленная из полимерного материала, может быть запрессована на четвертую секцию 60D и образует участок захвата (оператором) для четвертой секции 60D, см. фиг.3. Первая боковая поверхность 60Е рычага управления 60 может быть расположена в первой плоскости P1, а вторая боковая поверхность 60F рычага управления 60 может быть расположена во второй плоскости Р2, которая в целом параллельна первой плоскости P1, см. фиг.7.
Отверстие 260А предусмотрено на конце 260 первой секция 60А первого рычага управления 60, см. фиг.6 и 8. Опорный элемент, который содержит в целом цилиндрическую бобышку 360, введен в отверстие 260А и приварен к концу 260, см. фиг.12-14. Бобышка 360 может иметь длину LB1 около 43 мм, см. фиг.9. В показанном варианте бобышку 360 устанавливают под углом в отверстии 260А, так что первая внешняя лицевая поверхность 360А бобышки 360 образует угол α1 около 6.8 градусов с первой боковой поверхностью 60Е рычага управления 60, см. фиг.13. Бобышку 360 затем приваривают к рычагу 60 управления. После операции сварки первая внешняя лицевая поверхность 360А бобышки 360 подвергается механической обработке, чтобы внешняя лицевая поверхность 360А шла под углом α1 около 6.8 градусов к первой боковой поверхности 60Е рычага 60 управления. Противоположная вторая внешняя лицевая поверхность 360С бобышки 360 также может быть обработана под углом α1. Однако эта последняя операция механической обработки второй внешней лицевой поверхности 360С не является необходимой. После механической обработки первой внешней лицевой поверхности 360А бобышки производят полную механическую обработку отверстия 360В, идущего через бобышку 360. Ось отверстия 360В идет под углом около 90 градусов к обработанной первой внешней лицевой поверхности 360А бобышки 360. Отверстие 260А на конце 260 первой секции 60А первого рычага управления 60 является слегка эллиптическим по форме, то есть ось D1 несколько длиннее оси D2, см. фиг.8, чтобы обеспечивать угловую ориентацию бобышки 360.
Кроме того, в показанном варианте самая внешняя точка 360D на бобышке 360 расположена на расстоянии DB1, составляющем около 26.8 мм, от первой боковой поверхности 60Е рычага 60 управления, см. фиг.13.
Конец 260 первой секции 60А первого рычага управления 60 имеет первую, вторую и третью главным образом плоские лицевые поверхности 260В, 260С и 260D. Первый удлинительный элемент 460 приварен к первой лицевой поверхности 260В, см. фиг.12-14. Удлинительный элемент 460 имеет в целом шестиугольную форму, см. фиг.10. Перед проведением сварки первый удлинительный элемент 460 устанавливают относительно первой лицевой поверхности 260В так, что первая внешняя лицевая поверхность 460А удлинительного элемента 460 будет главным образом параллельна первой внешней лицевой поверхности 360А бобышки 360. После сварки первого удлинительного элемента 460 с концом 260 первая внешняя лицевая поверхность 460А удлинительного элемента 460 должна быть механически обработана так, чтобы первая внешняя лицевая поверхность 460А была главным образом параллельна первой внешней лицевой поверхности 360А бобышки 360. Противоположная вторая внешняя лицевая поверхность 460С удлинительного элемента 460 также может быть механически обработана так, чтобы она была параллельна первой внешней лицевой поверхности 460А. Однако эта последняя операция механической обработки второй внешней лицевой поверхности 460С не является обязательной. После механической обработки удлинения первой внешней лицевой поверхности 460А производят полную механическую обработку отверстия 460В, идущего через удлинительный элемент 460. Ось отверстия 460В идет под углом около 90 градусов к обработанной первой внешней лицевой поверхности 460А удлинительного элемента 460.
Кроме того, в показанном варианте первая внешняя лицевая поверхность 360А бобышки 360 смещена ориентировочно на 14.7 мм от первой внешней лицевой поверхности 460А удлинительного элемента 460. Удлинительный элемент 460 имеет длину LE около 18.1 мм, см. фиг.10.
Вторая рычажная конструкция 210 содержит второй рычаг 61 управления. Второй рычаг 61 преимущественно получен за счет отрезки лазером от плоской стальной пластины и имеет соответственно первую, вторую, третью и четвертую секции, 61A-61D, см. фиг.3. Как это показано на фиг.3, первая и вторая секции 61А и 61В пересекаются с образованием первого тупого угла, вторая и третья секции 61В и 61С пересекаются с образованием второго тупого угла, а третья и четвертая секции 61C и 61D пересекаются с образованием третьего тупого угла. Вторая, третья и четвертая секции 61B-61D второго рычага 61 управления имеют ориентировочно U-образную форму, см. фиг.3. В показанном варианте вторая рукоятка 161D, изготовленная из полимерного материала, может быть запрессована на четвертую секцию 61D и образует участок захвата (оператором) для четвертой секции 61D, см. фиг.3. Первая боковая поверхность 61Е рычага управления 61 может быть расположена в плоскости, которая в целом параллельна плоскости, в которой расположена вторая боковая поверхность 61F рычага управления 61, см. фиг.16.
Отверстие 261А предусмотрено на конце 261 первой секции 61А второго рычага 61 управления, см. фиг.15 и 17. Опорный элемент, который содержит в целом цилиндрическую бобышку 361, введен в отверстие 261А и приварен к концу 261, см. фиг.15-17. Бобышка 361 может иметь длину LB2 около 38 мм, см. фиг.16. В показанном варианте бобышку 361 устанавливают под углом в отверстии 261А, так что первая внешняя лицевая поверхность 361А бобышки 361 образует угол α2 около 9.6 градусов с первой боковой поверхностью 61Е рычага управления 61, см. фиг.16. Бобышку 361 затем приваривают к рычагу 61 управления. После операции сварки первая внешняя лицевая поверхность 361А бобышки 360 подвергается механической обработке, чтобы внешняя лицевая поверхность 361А шла под углом α2 около 9.6 градусов относительно первой боковой поверхности 61Е рычага управления 61. Противоположная вторая внешняя лицевая поверхность 361C бобышки 360 также может быть обработана под углом α2. Однако эта последняя операция механической обработки второй внешней лицевой поверхности 361C не является необходимой. После механической обработки первой внешней лицевой поверхности 361А бобышки производят механическую обработку отверстия 361В, идущего через бобышку 361. Ось отверстия 361В идет под углом около 90 градусов к обработанной первой внешней лицевой поверхности 361А бобышки 361. Отверстие 261А на конце 261 первой секции 61А второго рычага управления 61 является слегка эллиптическим по форме, чтобы обеспечивать угловую ориентацию бобышки 361.
Кроме того, в показанном варианте самая внешняя точка 361D на бобышке 361 расположена на расстоянии DB2, составляющем около 17 мм, от первой боковой поверхности 61Е рычага управления 61.
Конец 261 первой секции 61А второго рычага 61 управления имеет первую, вторую и третью главным образом плоские лицевые поверхности 261В, 261С и 261D, см. фиг.17. Второй удлинительный элемент 461 приварен к первой лицевой поверхности 261В, см. фиг.15-17. Удлинительный элемент 461 имеет в целом шестиугольную форму. Перед проведением сварки удлинительный элемент 461 устанавливают относительно первой лицевой поверхности 261В так, что первая внешняя лицевая поверхность 461А удлинительного элемента 461 будет главным образом параллельна первой внешней лицевой поверхности 361А бобышки 361. После сварки первого удлинительного элемента 461 с концом 261 первая внешняя лицевая поверхность 461А удлинительного элемента 461 должна быть механически обработана так, чтобы первая внешняя лицевая поверхность 461А была главным образом параллельна первой внешней лицевой поверхности 361А бобышки 361. Противоположная вторая внешняя лицевая поверхность 461C удлинительного элемента 461 также может быть механически обработана так, чтобы она была параллельна первой внешней лицевой поверхности 461А. Однако эта последняя операция механической обработки второй внешней лицевой поверхности 461C не является обязательной. После механической обработки удлинения первой внешней лицевой поверхности 461А производят механическую обработку отверстия 461В, идущего через удлинительный элемент 461. Ось отверстия 461В идет под углом около 90 градусов к обработанной первой внешней лицевой поверхности 461А удлинительного элемента 461.
Кроме того, в показанном варианте первая внешняя лицевая поверхность 361А бобышки 361 смещена ориентировочно на 7.8 мм от первой внешней лицевой поверхности 461А удлинительного элемента 461. Удлинительный элемент 461 имеет длину LE около 18.2 мм.
Третья рычажная конструкция 220 содержит третий рычаг 62 управления. Третий рычаг 62 управления преимущественно получен за счет отрезки лазером от плоской стальной пластины и имеет соответственно первую, вторую, третью и четвертую секции, 62A-62D, см. фиг.3. Как это показано на фиг.3, первая и вторая секции 62А и 62В пересекаются с образованием первого тупого угла, вторая и третья секции 62В и 62С пересекаются с образованием второго тупого угла, а третья и четвертая секции 62С и 62D пересекаются с образованием третьего тупого угла. Вторая, третья и четвертая секции 62B-62D третьего рычага 62 управления имеют ориентировочно U-образную форму, см. фиг.3. В показанном варианте третья рукоятка 162D, изготовленная из полимерного материала, может быть запрессована на четвертую секцию 62D и образует участок захвата (оператором) для четвертой секции 62D, см. фиг.3. Первая боковая поверхность 62Е рычага управления 62 может быть расположена в плоскости, которая в целом параллельна плоскости, в которой расположена вторая боковая поверхность 62F рычага управления 62, см. фиг.19.
Отверстие 262А предусмотрено на конце 262 первой секции 62А третьего рычага управления 62, см. фиг.18 и 20. Опорный элемент, который содержит в целом цилиндрическую бобышку 362, введен в отверстие 262А и приварен к концу 262, см. фиг.18-20. Бобышка 362 может иметь длину LB3 около 38 мм. В показанном варианте бобышку 362 устанавливают под углом в отверстии 262А, так что первая внешняя лицевая поверхность 362А бобышки 362 образует угол α3 около 12.4 градуса с первой боковой поверхностью 62Е рычага 62 управления, см. фиг.19. Бобышку 362 затем приваривают к рычагу 62 управления. После операции сварки первая внешняя лицевая поверхность 362А бобышки 362 подвергается механической обработке, чтобы внешняя лицевая поверхность 362А шла под углом α3 около 12.4 градусов относительно первой боковой поверхности 62Е рычага управления 62. Противоположная вторая внешняя лицевая поверхность 362С бобышки 362 также может быть обработана под углом α3. Однако эта последняя операция механической обработки второй внешней лицевой поверхности 362С не является необходимой. После механической обработки первой внешней лицевой поверхности 362А бобышки производят механическую обработку отверстия 362В, идущего через бобышку 362. Ось отверстия 362В идет под углом около 90 градусов к обработанной первой внешней лицевой поверхности 362А бобышки 362. Отверстие 262А на конце 262 первой секции 62А третьего рычага управления 60 является слегка эллиптическим по форме, чтобы обеспечивать угловую ориентацию бобышки 362.
Кроме того, в показанном варианте самая внешняя точка 362D на бобышке 362 расположена на расстоянии DB3, составляющем около 13 мм, от первой боковой поверхности 62Е рычага 62 управления
Конец 262 первой секции 62А третьего рычага 62 управления имеет первую, вторую и третью главным образом плоские лицевые поверхности 262В, 262С и 262D. Третий удлинительный элемент 462 приварен к первой лицевой поверхности 262В, см. фиг.18-20. Удлинительный элемент 462 имеет в целом шестиугольную форму. Перед проведением сварки удлинительный элемент 462 устанавливают относительно первой лицевой поверхности 262В так, что первая внешняя лицевая поверхность 462А удлинительного элемента 462 будет главным образом параллельна первой внешней лицевой поверхности 362А бобышки 362. После того, как третий удлинительный элемент 462 будет приварен к концу 262, первая внешняя лицевая поверхность 462А удлинительного элемента 462 должна быть механически обработана так, чтобы первая внешняя лицевая поверхность 462А была главным образом параллельна первой внешней лицевой поверхности 362А бобышки 362. Противоположная вторая внешняя лицевая поверхность 462С удлинительного элемента 462 также может быть механически обработана так, чтобы она была параллельна первой внешней лицевой поверхности 462А. Однако эта последняя операция механической обработки второй внешней лицевой поверхности 462С не является обязательной. После механической обработки удлинения первой внешней лицевой поверхности 462А производят механическую обработку отверстия 462В, идущего через удлинительный элемент 462. Ось отверстия 462В идет под углом около 90 градусов к обработанной первой внешней лицевой поверхности 462А удлинительного элемента
Кроме того, в показанном варианте первая внешняя лицевая поверхность 362А бобышки 362 смещена ориентировочно на 5.9 мм от первой внешней лицевой поверхности 462А удлинительного элемента 462. Удлинительный элемент 462 имеет длину LE около 18.2 мм.
Четвертая рычажная конструкция 230 содержит четвертый рычаг 63 управления. Четвертый рычаг управления 63 преимущественно получен за счет отрезки лазером от плоской стальной пластины и имеет соответственно первую, вторую, третью и четвертую секции 63A-63D, см. фиг.3. Как это показано на фиг.3, первая и вторая секции 63А и 63В пересекаются с образованием первого тупого угла, вторая и третья секции 63В и 63С пересекаются с образованием второго тупого угла, а третья и четвертая секции 63С и 63D пересекаются с образованием третьего тупого угла. Вторая, третья и четвертая секции 63В-63D четвертого рычага 63 управления имеют ориентировочно U-образную форму, см. фиг.3. В показанном варианте четвертая рукоятка 163D, изготовленная из полимерного материала, может быть запрессована на четвертую секцию 63D и образует участок захвата (оператором) для четвертой секции 63D, см. фиг.3. Первая боковая поверхность 63Е рычага 63 управления может быть расположена в плоскости, которая в целом параллельна плоскости, в которой расположена вторая боковая поверхность 63F рычага 63 управления, см. фиг.22.
Отверстие 263А предусмотрено на конце 263 первой секции 63А четвертого рычага 63 управления, см. фиг.21 и 23. Опорный элемент, который содержит в целом цилиндрическую бобышку 363, введен в отверстие 263А и приварен к концу 263, см. фиг.21-23. Бобышка 363 может иметь длину LB4 около 42 мм. В показанном варианте бобышку 363 устанавливают под углом в отверстии 263А, так что первая внешняя лицевая поверхность 363А бобышки 363 образует угол α4 около 14.8 градусов с первой боковой поверхностью 63Е рычага 63 управления, см. фиг.22. Бобышку 363 затем приваривают к рычагу 63 управления. После операции сварки первая внешняя лицевая поверхность 363А бобышки подвергается механической обработке, чтобы внешняя лицевая поверхность 363А шла под углом α4 около 14.8 градусов к первой боковой поверхности 63Е рычага 63 управления. Противоположная вторая внешняя лицевая поверхность 363С бобышки 363 также может быть обработана под углом α4. Однако эта последняя операция механической обработки второй внешней лицевой поверхности 363С не является необходимой. После механической обработки первой внешней лицевой поверхности 363А производят механическую обработку отверстия 363В, идущего через бобышку 363. Ось отверстия 363В идет под углом около 90 градусов к обработанной первой внешней лицевой поверхности 363А бобышки 363. Отверстие 263А на конце 263 первой секции 63А четвертого рычага управления 63 является слегка эллиптическим по форме, чтобы обеспечивать угловую ориентацию бобышки 363.
Кроме того, в показанном варианте самая внешняя точка 363D на бобышке 363 расположена на расстоянии DB4, составляющем около 10.6 мм, от первой боковой поверхности 63Е рычага 63 управления
Конец 263 первой секции 63А четвертого рычага 63 управления имеет первую, вторую и третью главным образом плоские лицевые поверхности 263В, 263С и 263D. Четвертый удлинительный элемент 463 приварен к первой лицевой поверхности 263В, см. фиг.21-23. Удлинительный элемент 463 имеет в целом шестиугольную форму. Перед проведением сварки первый удлинительный элемент 463 устанавливают относительно первой лицевой поверхности 263В так, что первая внешняя лицевая поверхность 463А удлинительного элемента 463 будет главным образом параллельна первой внешней лицевой поверхности 363А бобышки 363. После сварки четвертого удлинительного элемента 463 с концом 263 первая внешняя лицевая поверхность 463А удлинительного элемента 463 должна быть механически обработана так, чтобы первая внешняя лицевая поверхность 463А была главным образом параллельна первой внешней лицевой поверхности 363А бобышки 363. Противоположная вторая внешняя лицевая поверхность 463С удлинительного элемента 463 также может быть механически обработана так, чтобы она была параллельна первой внешней лицевой поверхности 463А. Однако эта последняя операция механической обработки второй внешней лицевой поверхности 463С не является обязательной. После механической обработки удлинения первой внешней лицевой поверхности 463А производят механическую обработку отверстия 463В, идущего через удлинительный элемент 463. Ось отверстия 463В идет под углом около 90 градусов к обработанной первой внешней лицевой поверхности 463А удлинительного элемента 463.
Кроме того, в показанном варианте первая внешняя лицевая поверхность 363А бобышки 363 смещена ориентировочно на 3.8 мм от первой внешней лицевой поверхности 463А удлинительного элемента 463. Удлинительный элемент 463 имеет длину около 18.4 мм.
Механизм 70 рычага управления дополнительно содержит устройство 170 для установки первой, второй, третьей и четвертой рычажных конструкций 200, 210, 220 и 230 на колпаке основного корпуса 20 тележки. Устройство 170 для установки содержит кронштейн 172 и палец 174, см. фиг.3. Кронштейн 172 соединен с колпаком 30 при помощи болтов 173А и гаек 173В, см. также фиг.2 и 4. На противоположных сторонах бобышек 360-363 установлены пружинные шайбы 176, см. фиг.3. Рядом с первой пружинной шайбой 176А и последней пружинной шайбой 176В установлены плоские шайбы 178.
Для соединения первой, второй, третьей и четвертой рычажных конструкций 200, 210, 220 и 230 с кронштейном 172 палец 174 пропускают через пружинные шайбы 176, плоские шайбы 178 и отверстия 360В, 361В, 362В и 363В бобышек 360-363, см. фиг.3. Как это показано на фиг.2 и 3, вторая рычажная конструкция 210 расположена рядом с первой рычажной конструкцией 200, третья рычажная конструкция 220 расположена рядом со второй рычажной конструкцией 210, а четвертая рычажная конструкция 230 расположена рядом с третьей рычажной конструкцией 220. Палец 174 также пропускают через отверстия 172А в кронштейне 172. Палец 174 может удерживаться в отверстиях 172А за счет посадки с трением или при помощи скоб (не показаны). Бобышки 360-363 могут вращаться относительно пальца 174.
Как это показано на фиг.4, первый, второй, третий и четвертый рычаги 60-63 управления в целом совмещены, если смотреть сбоку. Однако для обеспечения более легкого доступа оператору О, сидящему в кресле 42, к второму, третьему и четвертому рычагам 61-63 управления, четвертая секция 61D второго рычага 61 управления выполнена несколько длиннее, чем четвертая секция 60D первого рычага 60 управления, четвертая секция 62D третьего рычага 62 управления выполнена несколько длиннее, чем четвертая секция 61D второго рычага 61 управления, а четвертая секция 63D четвертого рычага 63 управления выполнена несколько длиннее, чем четвертая секция 62D третьего рычага 62 управления, см. фиг.1А.
Как уже было указано здесь выше, механизм 70 рычага управления соединен с клапанным устройством 72, см. фиг.2 и 3. Предусмотрены соответственно первая, вторая, третья и четвертая рычажные передачи 500, 502, 504 и 506 клапанов для присоединения первой, второй, третьей и четвертой рычажных конструкций 200, 210, 220 и 230 механизма 70 рычага управления, соответственно к первому, второму, третьему и четвертому золотниковым клапанам 600, 602, 604 и 606, образующим часть клапанного устройства 72. Первые концы 500А, 502А, 504А и 506А рычажных передач 500, 502, 504 и 506 соединены при помощи пальцев 508 и скоб 510 с первым, вторым, третьим и четвертым удлинениями 460-463 первой, второй, третьей и четвертой рычажных конструкций 200, 210, 220 и 230. Вторые концы 500В, 502В, 504В и 506В рычажных передач 500, 502, 504 и 506 соединены при помощи пальцев 512 и скоб 514 с первым, вторым, третьим и четвертым удлинениями (выступающими частями) 600А, 602А, 604А и 606А клапанов 600, 602, 604 и 606. Расстояние между первым и вторым концами 500А и 500В первой рычажной передачи 500 может быть изменено при помощи винтовой стяжки 500С, расстояние между первым и вторым концами 502А и 502В второй рычажной передачи 502 может быть изменено при помощи винтовой стяжки 502С, расстояние между первым и вторым концами 504А и 504В третьей рычажной передачи 504 может быть изменено при помощи винтовой стяжки 504С, а расстояние между первым и вторым концами 506А и 506В четвертой рычажной передачи 506 может быть изменено при помощи винтовой стяжки 506С.
Преимущественно промежутки между первыми концами 500А, 502А, 504А и 506А рычажных передач 500, 502, 504 и 506 главным образом равны промежуткам между удлинениями 600А, 602А, 604А и 606А клапанов. Однако промежутки между рукоятками 160D, 161D, 162D и 163D, предусмотренными на четвертых секциях 60D, 61D, 62D и 63D первого, второго, третьего и четвертого рычагов 60-63 управления преимущественно больше промежутков между первыми концами 500А, 502А, 504А и 506А рычажных передач 500, 502, 504 и 506 так, чтобы эргономически улучшить схему расположения рукояток 160D, 161D, 162D и 163D относительно оператора О. Увеличение промежутков между рукоятками 160D, 161D, 162D и 163D по сравнению с промежутками между удлинениями 460-463, которые образуют промежутки между первыми концами 500А, 502А, 504А и 506А рычажных передач 500, 502, 504 и 506, получено в результате изменения углов α1, α2, α3 и α4 первых лицевых поверхностей 360А-363А бобышек 360-363 относительно первых боковых поверхностей 60Е, 61Е, 62Е и 63Е рычагов 60-63 управления, длины LB1, LB2, LB3 и LB4 бобышек 360-363 и расстояний между самыми внешними точками 360D, 361D, 362D и 363D на бобышках 360-363 и первыми боковыми поверхностями 60Е, 61Е, 62Е и 63Е рычагов 60-63 управления.
Первый клапан 600 может управлять высотой вилочных захватов 100, второй клапан 602 может управлять наклоном узла 120 мачты, третий клапан 604 может управлять боковым сдвигом механизма 110 каретки и вилочных захватов 100, а четвертый клапан 606 может управлять расстоянием между вилочными захватами 100. Для управления работой золотниковых клапанов 600, 602, 604 и 606 первую, вторую, третью и четвертую рычажные конструкции 200, 210, 220 и 230 вращают (поворачивают) по часовой стрелке или против часовой стрелки, см. фиг.4. Например, когда первую рукоятку 160D толкают в направлении удаления от оператора О, вилочные захваты 100 могут опускаться, а когда первую рукоятку 160D тянут в направлении к оператору О, вилочные захваты 100 могут подниматься. Когда вторую рукоятку 161D толкают в направлении удаления от оператора О, узел 120 мачты может наклоняться в направлении удаления от оператора О, а когда вторую рукоятку 161D тянут в направлении к оператору О, узел 120 мачты может наклоняться в направлении оператора О. Когда третью рукоятку 162D толкают в направлении удаления от оператора О, механизм 110 каретки и вилочные захваты 100 могут сдвигаться влево, а когда третью рукоятку 162D тянут в направлении к оператору О, механизм 110 каретки и вилочные захваты 100 могут сдвигаться вправо. Когда четвертую рукоятку 163D толкают в направлении удаления от оператора О, вилочные захваты могут дополнительно раздвигаться друг от друга, а когда четвертую рукоятку 163D тянут в направлении к оператору О, вилочные захваты могут двигаться в направлении приближения друг к другу.
Вторая лицевая поверхность 260С на конце 260 первой секции 60А первого рычага 60 образует первый упор, который входит в зацепление с центральной пластиной 172В кронштейна 172, так чтобы оператор О не мог толкать первый рычаг 60 слишком далеко в направлении удаления от оператора О и не мог повредить клапан 600, см. фиг.3, 8 и 14. Третья лицевая поверхность 260D на конце 260 первой секции 60А первого рычага 60 образует второй упор, который входит в зацепление с центральной пластиной 172В кронштейна 172, так чтобы оператор О не мог тянуть первый рычаг 60 слишком далеко в направлении оператора О и не мог повредить клапан 600. Аналогичным образом вторые лицевые поверхности 261С, 262С и 263С на втором, третьем и четвертом рычагах 61-63 образуют первые упоры, которые входят в зацепление с центральной пластиной 172В кронштейна 172, так чтобы оператор О не мог толкать эти рычаги 61-63 слишком далеко в направлении удаления от оператора О и не мог повредить клапаны 602, 604 и 606, см. фиг.3, 5, 17, 20 и 23. Третьи лицевые поверхности 261D, 262D и 263D на концах 261-263 второго, третьего и четвертого рычагов 61-63 образуют вторые упоры, которые входят в зацепление с центральной пластиной 172В кронштейна 172, так чтобы оператор О не мог тянуть рычаги 61-63 слишком далеко в направлении оператора О и не мог повредить клапаны 602, 604 и 606.
Как это показано на фиг.3 и 11, первый, второй и третий микропереключатели 710, 712 и 714 соединены болтами с кронштейном 720, который, в свою очередь, соединен болтами с клапанным устройством 72. На фиг.11 показано, что верхняя секция 500D второго конца 500В рычажной передачи 500 только что вошла в зацепление с рычагом 710А исполнительного механизма первого микропереключателя 710, а верхняя и нижняя секции 502D и 502Е второго конца 502В рычажной передачи 502 только что вошли в зацепление с соответствующими рычагами 712А и 714А исполнительных механизмов второго и третьего микропереключателей 712 и 714.
Когда блоки 128 гидравлического поршня/цилиндра наклоняют узел 120 мачты больше заданного порогового значения в направлении удаления от оператора, например, на 2 градуса от вертикали, а механизм 110 каретки вилочных захватов и вилочные захваты 100 подняты в положение, в котором мачтовые элементы 124 и 126 готовы двигаться относительно мачтового элемента 122, движение, за счет гидроцилиндров, поднимания и опускания мачтовых элементов 124 и 126 относительно мачтового элемента 122 блокируется, движение дополнительного гидроцилиндра для поднимания и опускания механизма 110 каретки вилочных захватов и вилочных захватов 100 относительно мачтового элемента 126 блокируется и движение узла 120 мачты за счет блоков 128 гидравлического поршня/цилиндра блокируется. Однако механизм 110 каретки вилочных захватов и вилочные захваты 100 могут быть опущены, если толкать первую рукоятку 160D в направлении удаления от оператора О, так чтобы верхняя секция 500D второго конца 500В рычажной передачи 500 двигалась относительно рычага 710А исполнительного механизма, чтобы включать первый микропереключатель 710. Кроме того, узел 120 мачты может перемещаться при помощи блоков 128 гидравлического поршня/цилиндра в направлении оператора О, если оператор смещает вторую рукоятку 161D из ее нейтрального положения в направлении к оператору О, так чтобы нижняя секция 502Е второго конца 502В рычажной передачи 502 двигалась относительно рычага 714А исполнительного механизма третьего микропереключателя 714, чтобы включать этот микропереключатель 714.
Если гидроцилиндры для поднимания и опускания мачтовых элементов 124 и 126 сработали, так что мачтовые элементы 124 и 126 совершили вертикальное перемещение на некоторую величину относительно мачтового элемента 122, а вторая рукоятка 161D перемещена в направлении удаления от оператора О, это побуждает блоки 128 гидравлического поршня/цилиндра перемещать узел 120 мачты в пороговое положение, например, со смещением 2 градуса от вертикали, при этом срабатывает второй микропереключатель 712, так что движение гидроцилиндров для поднимания и опускания мачтовых элементов 124 и 126 относительно мачтового элемента 122 блокируется, движение узла 120 мачты в направлении удаления от оператора блокируется и движение механизма 110 каретки вилочных захватов и вилочных захватов 100 блокируется. Если вторую рукоятку 161D вернуть в ее нейтральное положение, микропереключатель 712 отключается, так что может происходить движение гидроцилиндров для поднимания и опускания мачтовых элементов 124 и 126 относительно мачтового элемента 122, может происходить движение узла 120 мачты в направлении оператора и может происходить движение механизма 110 каретки вилочных захватов и вилочных захватов 110. Второй микропереключатель 712 включается, когда оператор перемещает вторую рукоятку 161D из нейтрального положения в направлении удаления от оператора О, так что верхняя секция 502D второго конца 502В рычажной передачи 502 движется относительно рычага 712А исполнительного механизма, чтобы включать второй микропереключатель 712.
Клапанное устройство 72 соединено с колпаком 30 основного корпуса 20 тележки при помощи болтов 72А и гаек 72В, см. фиг.3.
В соответствии с настоящим изобретением конфигурация каждого рычага 60-63 управления выбрана так, чтобы максимально увеличить зону VZ наблюдения оператора, сидящего в кресле 42 и смотрящего вперед в направлении вилочных захватов 100, см. фиг.1. Более конкретно конфигурация рычагов 60-63 управления выбрана так, чтобы свести к минимуму перекрытие рычагами 60-63 управления смотрового окна W оператора, ограниченного правой частью 120А узла 120 мачты, когда оператор сидит в кресле-сиденье 42 и смотрит вперед в направлении вилочных захватов 100, и правой стойкой 22 в виде буквы А, см. фиг.1А. Вновь обратимся к рассмотрению фиг.1, на которой показано, что зона VZ наблюдения оператора образована самой нижней плоскостью VPLM наблюдения и всеми плоскостями наблюдения, расположенными над самой нижней плоскостью VPLM наблюдения, в том числе и плоскостью VP1. Первая, вторая, третья и четвертая рычажные конструкции 200, 210, 220, 230 выполнены так, что третьи секции 60С, 61С, 62С и 63С рычагов 60-63 управления находятся в самой нижней плоскости VРLM наблюдения зоны VZ наблюдения оператора или ориентировочно параллельны этой плоскости. Можно полагать, что за счет указанной конфигурации рычажных конструкций 200, 210, 220 и 230 зона VZ наблюдения оператора может быть максимальной. В отличие от этого рычаги 700-703 управления, имеющие другую конфигурацию, например первую и вторую секции, идущие ориентировочно под углом 90 градусов друг к другу, как это показано пунктиром на фиг.1 и сплошными линиями на фиг.1В, будут заходить в зону VZ наблюдения оператора (перекрывать ее). Следовательно, если каждый из первого, второго, третьего и четвертого рычагов управления выполнить как рычаги 700-703, то зона VZ наблюдения оператора будет уменьшена, так как самой нижней плоскостью наблюдения будет не плоскость VРLM, а плоскость VРLM700, см. фиг.1.
В соответствии с альтернативным вариантом осуществления настоящего изобретения первая, вторая, третья и четвертая рычажные конструкции 200, 210, 220, 230 могут иметь другую конфигурацию. Например, как это показано пунктиром на фиг.4, первая и вторая секции 60А и 60В первого рычага управления могут быть объединены в единую секцию 760А. Секция 760А соединяется непосредственно с третьей секцией 760С, так что рычаг управления будет иметь только три секции вместо четырех. Второй, третий и четвертый рычаги управления также могут иметь аналогичную конфигурацию.
Несмотря на то, что были описаны предпочтительные варианты осуществления изобретения, совершенно ясно, что в них специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят за рамки формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПИНКА ОПОРЫ ОПЕРАТОРА И ОПОРНАЯ ПОДУШКА КОЛЕНА ДЛЯ ТЕЛЕЖКИ ДЛЯ ПОГРУЗКИ-РАЗГРУЗКИ МАТЕРИАЛОВ | 2007 |
|
RU2444460C2 |
| МЕХАНИЗМ РАСКРЫТИЯ И ЗАКРЫВАНИЯ ФОРМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ (ВАРИАНТЫ), СЕКЦИОННАЯ МАШИНА (ВАРИАНТЫ) | 1998 |
|
RU2187468C2 |
| МЕХАНИЗМ ПЕРЕВОРАЧИВАНИЯ И УДЕРЖАНИЯ ГОРЛОВОГО КОЛЬЦА ДЛЯ СЕКЦИОННОЙ МАШИНЫ (ВАРИАНТЫ) | 1998 |
|
RU2184089C2 |
| МЕХАНИЗМ РАСКРЫТИЯ И ЗАКРЫВАНИЯ ФОРМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ | 1998 |
|
RU2205159C2 |
| СЕКЦИОННАЯ МАШИНА | 2001 |
|
RU2245306C2 |
| СЕКЦИОННАЯ МАШИНА (ВАРИАНТЫ) | 1998 |
|
RU2198143C2 |
| УСТРОЙСТВО ТРАНСПОРТИРОВКИ АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2012 |
|
RU2582434C2 |
| СЕКЦИОННАЯ МАШИНА | 1998 |
|
RU2205803C2 |
| МЕХАНИЗМ РАСКРЫТИЯ И ЗАКРЫВАНИЯ ФОРМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ | 1998 |
|
RU2187469C2 |
| РАЗГРУЗОЧНЫЙ МЕХАНИЗМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ | 1998 |
|
RU2186041C2 |

В изобретении предлагается механизм (70) рычага управления для установки на колпаке основного корпуса тележки для погрузки-разгрузки материалов. Механизм (70) рычага управления может иметь по меньшей мере одну рычажную конструкцию, которая содержит рычаг (60-63) управления, имеющий секцию, которая находится в самой нижней плоскости наблюдения зоны наблюдения оператора или ориентировочно параллельна этой плоскости. Зона наблюдения оператора имеет по меньшей мере одну плоскость наблюдения, расположенную над самой нижней плоскостью наблюдения, и устройство для установки указанной рычажной конструкции на колпаке основного корпуса. Изобретение обеспечивает увеличение зоны видимости. 11 з.п. ф-лы, 23 ил.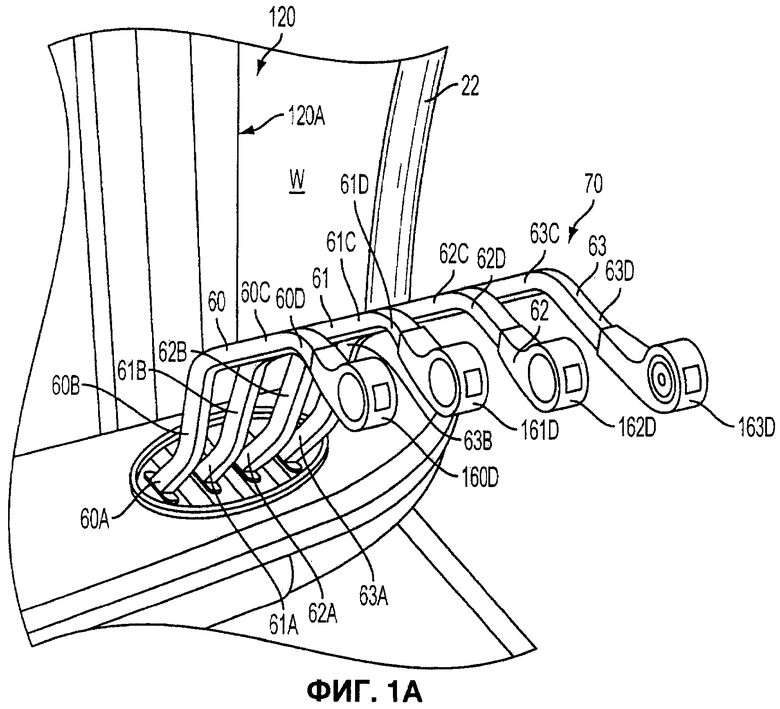
1. Механизм (70) рычага управления, установленный на основном корпусе (20) тележки для погрузки-разгрузки материалов (10), содержащий:
по меньшей мере один рычаг (60-63) управления, имеющий первую, вторую, третью и четвертую секции (60A-60D, 61A-61D, 62A-62D, 63А-63D), причем:
- первая секция (60А-63А) установлена на колпаке (30);
- вторая секция (60В-63В) пересекается с первой секцией (60А-63А) и третьей секцией (60С-63С);
- третья секция (60С-63С) пересекается с четвертой секцией (60D-63D), которая содержит участок захвата оператором (О);
- вторая, третья и четвертая секции (60В-63В, 60С-63С, 60D-63D) имеют ориентировочно U-образную форму; и
- рычаг (60-63) управления установлен таким образом, что третья секция (60С-63С) рычага (60-63) управления ориентировочно параллельна самой нижней плоскости (VPLM) наблюдения максимально увеличенной зоны (VZ) наблюдения оператора (О) тележки.
2. Механизм (70) рычага управления по п.1, в котором первая и вторая секции (60А и 60В, 61А и 61В, 62А и 62В, 63А и 63В) пересекаются с образованием первого тупого угла, вторая и третья секции (60В и 60С, 61В и 61C, 62В и 62С, 63В и 63С) пересекаются с образованием второго тупого угла, третья и четвертая секции (60С и 60D, 61C и 6D, 62С и 62D, 63С и 63D) пересекаются с образованием третьего тупого угла.
3. Механизм (70) рычага управления по п.1 или 2, в котором первая боковая поверхность рычага управления расположена в первой плоскости (P1), а вторая боковая поверхность рычага управления расположена во второй плоскости (Р3), которая параллельна указанной первой плоскости.
4. Механизм (70) рычага управления по п.1, который дополнительно содержит опорный элемент (360, 361, 362, 363), соединенный с концом рычага (60-63) управления и имеющий лицевую поверхность, расположенную в плоскости, которая расположена под углом к плоскости боковой поверхности указанного рычага.
5. Механизм (70) рычага управления по п.4, в котором опорный элемент содержит бобышку (360, 361, 362, 363), соединенную с рычагом управления.
6. Механизм (70) рычага управления по п.5, в котором конец рычага управления имеет отверстие (260А, 261, 262А, 263А), а бобышка проходит по меньшей мере частично через это отверстие и приварена к концу рычага управления.
7. Механизм (70) рычага управления по одному из пп.4-6, в котором рычаг дополнительно содержит удлинительный элемент (460, 461, 462, 463), соединенный с концом рычага управления и выполненный с возможностью соединения с рычажной передачей клапана, и имеющий боковую стенку, параллельную указанной лицевой поверхности опорного элемента.
8. Механизм (70) рычага управления по одному из пп.4-6, в котором опорный элемент имеет отверстие (360В, 361В, 362В, 363В), а на колпаке (30) основного корпуса имеется кронштейн (172), соединенный с колпаком корпуса, и через указанное отверстие в опорном элементе и через отверстия в указанном кронштейне пропущен палец (174).
9. Механизм (70) рычага управления по п.1, содержащий два рычага управления.
10. Механизм (70) рычага управления по п.9, в котором четвертая секция второго рычага управления имеет длину, которая превышает длину четвертой секции первого рычага управления.
11. Механизм (70) рычага управления по п.8 или 9, в котором первый и второй рычаги (60, 61) управления вырезаны из сплошного плоского листа металла.
12. Механизм рычага управления по п.1, снабженный средствами крепления рычага управления к колпаку основного корпуса тележки.
| US 4646869 A, 03.03.1987 | |||
| Механизм управления постоянно замкнутой муфтой сцепления | 1989 |
|
SU1745575A1 |
| JP 09309353 A, 02.12.1997 | |||
| JP 62041200 A, 23.02.1987 | |||
| Устройство для задания координат | 1984 |
|
SU1221645A1 |
| US 3841698 A, 15.10.1974 | |||
| GB 866833 A, 03.05.1961 | |||
| Приспособление для оштукатуривания потолка | 1931 |
|
SU26788A1 |

