Предпосылки к созданию изобретения
Известно использование спинки опоры оператора в сквозном отсеке оператора тележки для погрузки-разгрузки материалов. В некоторых известных ранее тележках, спинка снабжена боковыми кронштейнами, которые выступают наружу. Боковые кронштейны являются неудобными, так как они сужают проход через сквозной отсек оператора и, следовательно, затрудняют движение оператора через отсек оператора.
Опорная подушка для тележки, такой как тележка с поддонами, раскрыта в патенте США No. 6,948,739 В2.
Существует необходимость в создании усовершенствованной спинки для использования в тележке для погрузки-разгрузки материалов, имеющей сквозной отсек оператора.
Сущность изобретения
В соответствии с настоящим изобретением предлагается спинка опоры оператора, предназначенная для тележки для погрузки-разгрузки материалов, имеющей сквозной отсек оператора, причем спинка не содержит один или несколько боковых кронштейнов. Вместо этого спинка образована при помощи первичной опорной подушки, имеющей в целом криволинейную поверхность, причем внешние боковые участки идут под углом к плоскости, в целом касательной к центральному участку опорной подушки под углом ориентировочно меньше чем 45 градусов. Таким образом, боковые участки не затрудняют существенно движение оператора через сквозной отсек оператора. Кроме того, устройство захвата предусмотрено на боковых участках первичной опорной подушки, чтобы захватывать спину/бедра оператора во время движения тележки, в том числе движения тележки на повороте.
Кроме того, в соответствии с настоящим изобретением предлагается спинка опоры оператора тележки для погрузки-разгрузки материалов, имеющей отсек оператора с единственным входом в отсек. Спинка может иметь по меньшей мере один кронштейн у входа в отсек. Преимущественно в кронштейн встроено устройство захвата, предназначенное для захватывания оператора во время движения тележки.
В соответствии с первым аспектом настоящего изобретения предлагается спинка опоры оператора в комбинации с тележкой для погрузки-разгрузки материалов. Спинка может иметь первичную опорную подушку и устройство захвата, расположенное по меньшей мере на одном боковом участке первичной опорной подушки. Устройство захвата может быть расположено главным образом заподлицо с или может выступать над поверхностью участка первичной опорной подушки, окружающего устройство захвата, для вхождения в зацепление с оператором, находящимся на указанной тележке для погрузки-разгрузки материалов.
Устройство захвата может быть образовано в виде единого целого с первичной опорной подушкой. Альтернативно устройство захвата может быть образовано отдельно от первичной опорной подушки.
Устройство захвата может иметь по меньшей мере один геометрический элемент, имеющий в целом круговую, в целом прямоугольную, в целом эллиптическую или в целом L-образную форму.
Также предусмотрено, что устройство захвата может иметь первый основной корпус, имеющий первую базовую секцию и множество первых элементов, которые являются гибкими относительно первой базовой секции. Первый основной корпус может быть расположен на первом боковом участке первичной опорной подушки. Первый боковой участок может быть криволинейным.
Первичная опорная подушка может дополнительно иметь центральный участок. Первый боковой участок может идти относительно плоскости, в целом касательной к центральному участку, под углом ориентировочно больше чем 45 градусов.
Устройство захвата может дополнительно иметь второй основной корпус, имеющий вторую базовую секцию и множество вторых элементов, которые являются гибкими относительно второй базовой секции. Второй основной корпус может быть расположен на втором боковом участке первичной опорной подушки. Второй боковой участок может быть криволинейным. Как первый, так и второй боковые участки могут идти относительно плоскости, в целом касательной к центральному участку, под углом ориентировочно меньше чем 45 градусов.
В соответствии со вторым аспектом настоящего изобретения предлагается тележка для погрузки-разгрузки материалов, которая содержит сквозной отсек оператора. Отсек оператора может иметь противоположные первую и вторую стенки и спинку, объединенную с первой стенкой. Спинка может иметь первичную опорную подушку и устройство захвата, расположенное по меньшей мере на одном боковом участке первичной опорной подушки. Устройство захвата может быть расположено главным образом заподлицо с или может выступать над поверхностью участка первичной опорной подушки, окружающего устройство захвата, для вхождения в зацепление с оператором, находящимся на указанной тележке для погрузки-разгрузки материалов.
Устройство захвата может иметь по меньшей мере один геометрический элемент, имеющий в целом круговую, в целом прямоугольную, в целом эллиптическую или в целом L-образную форму.
Также предусмотрено, что устройство захвата может иметь первый основной корпус, расположенный на первом боковом участке первичной опорной подушки, и второй основной корпус, расположенный на втором боковом участке первичной опорной подушки. Первый основной корпус может иметь первую базовую секцию и множество первых элементов, которые являются гибкими относительно первой базовой секции, а второй основной корпус может иметь вторую базовую секцию и множество вторых элементов, которые являются гибкими относительно второй базовой секции.
Первичная опорная подушка может дополнительно иметь центральный участок. Как первый, так и второй боковые участки могут идти относительно плоскости, в целом касательной к центральному участку, под углом ориентировочно меньше чем 45 градусов.
Отсек оператора может дополнительно иметь первую подушку опоры колена, объединенную со второй стенкой, которая содержит первый основной корпус, имеющий первую базовую секцию и множество первых элементов. Первые элементы могут быть гибкими относительно первой базовой секции. Альтернативно первые элементы могут быть в целом не гибкими по меньшей мере в одном направлении и могут быть разделены друг от друга выемками.
Отсек оператора может дополнительно иметь вторую подушку опоры колена, объединенную со второй стенкой, которая содержит второй основной корпус, имеющий вторую базовую секцию и множество вторых элементов, которые являются гибкими относительно второй базовой секции.
В соответствии с третьим аспектом настоящего изобретения предлагается тележка для погрузки-разгрузки материалов, которая содержит отсек оператора с единственным входом в отсек оператора, который также является и выходом из него. Отсек оператора может иметь спинку, которая содержит первичную опорную подушку и устройство захвата, расположенное по меньшей мере на одном боковом участке первичной опорной подушки. Устройство захвата может быть расположено главным образом заподлицо с или может выступать над поверхностью участка первичной опорной подушки, окружающего устройство захвата, для вхождения в зацепление с оператором, находящимся на указанной тележке для погрузки-разгрузки материалов.
Устройство захвата может иметь по меньшей мере один геометрический элемент, имеющий в целом круговую, в целом прямоугольную, в целом эллиптическую или в целом L-образную форму.
Также предусмотрено, что устройство захвата может иметь основной корпус, имеющий базовую секцию и по меньшей мере один элемент, который является гибким относительно базовой секции. Основной корпус может быть расположен на первом боковом участке первичной опорной подушки.
Первый боковой участок может быть расположен поблизости от входа в отсек оператора.
В соответствии с четвертым аспектом настоящего изобретения предлагается тележка для погрузки-разгрузки материалов, которая содержит сквозной отсек оператора, имеющий противоположные первую и вторую стенки. Первая подушка опоры колена объединена с одной из первой и второй стенок. Опорная подушка содержит первый основной корпус, имеющий первую базовую секцию и множество первых элементов, которые являются главным образом негибкими относительно первой базовой секции. Первые элементы отделены друг от друга выемками.
Первая базовая секция выполнена так, что образует выемку, так что первый основной корпус работает как пластинчатая пружина, чтобы поглощать и ослаблять силы, приложенные коленом оператора к первому основному корпусу.
Отсек оператора может дополнительно иметь вторую подушку опоры колена, объединенную с одной стенкой, которая содержит второй основной корпус, имеющий вторую базовую секцию и множество вторых элементов, которые главным образом являются негибкими относительно второй базовой секции. Вторые элементы отделены друг от друга выемками.
В соответствии с пятым аспектом настоящего изобретения предлагается тележка для погрузки-разгрузки материалов, которая содержит основной корпус и подушку для колена. Основной корпус тележки содержит выемку для колена в отсеке оператора, предназначенную для введения в нее колена оператора. Выемка для колена может быть образована по меньшей мере двумя стенками, которые сходятся в угловой секции. Подушка для колена имеет угловой участок, расположенный так, чтобы закрывать угловую секцию основного корпуса тележки. Угловой участок содержит основной корпус подушки, имеющий базовую секцию и множество первых элементов, которые являются гибкими относительно базовой секции.
Основной корпус подушки может быть выполнен так, чтобы содержать выемку, так что основной корпус подушки работает как пластинчатая пружина, чтобы поглощать и ослаблять силы, приложенные коленом оператора к основному корпусу подушки.
Первые элементы представляют собой ребра. Ребра могут идти под углом к горизонтальной плоскости, составляющим ориентировочно от 10 градусов до 60 градусов.
Краткое описание чертежей
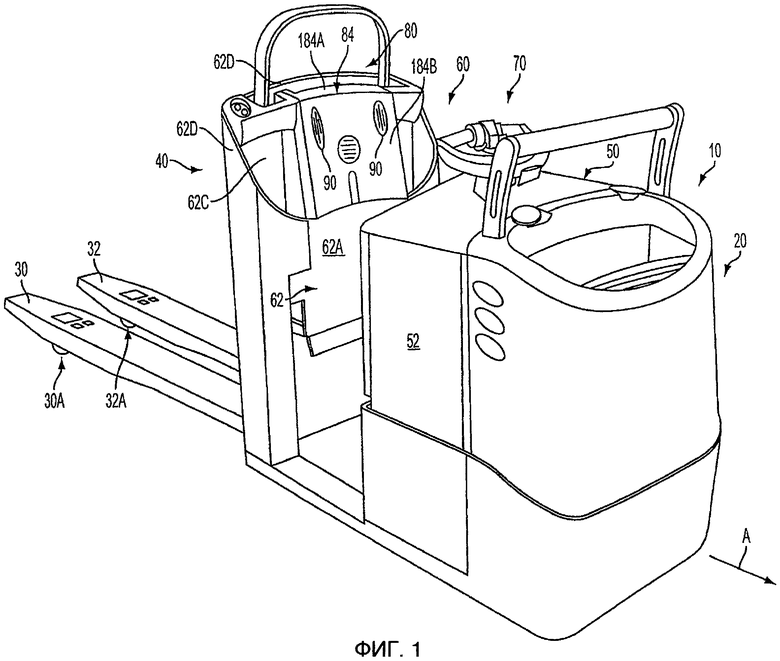
На фиг.1 показан вид в перспективе тележки для погрузки-разгрузки материалов, которая содержит спинку опоры оператора и мат, снабженный подушками (для) опоры колен, сконструированными в соответствии с настоящим изобретением.
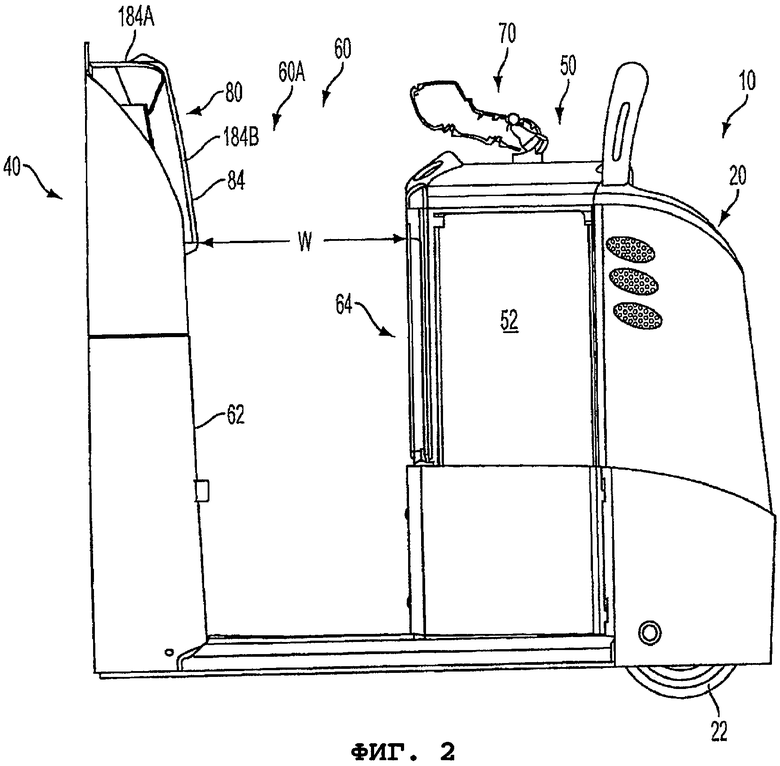
На фиг.2 показан вид сбоку опорной стенки, силового агрегата и батарейного отсека тележки для погрузки-разгрузки материалов, показанной на фиг.1, с непоказанными вилочными захватами.
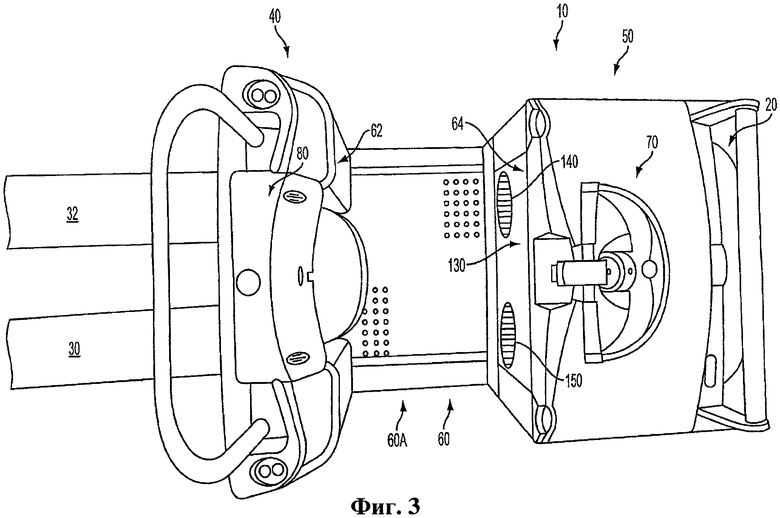
На фиг.3 показан вид сверху тележки, показанной на фиг.1.
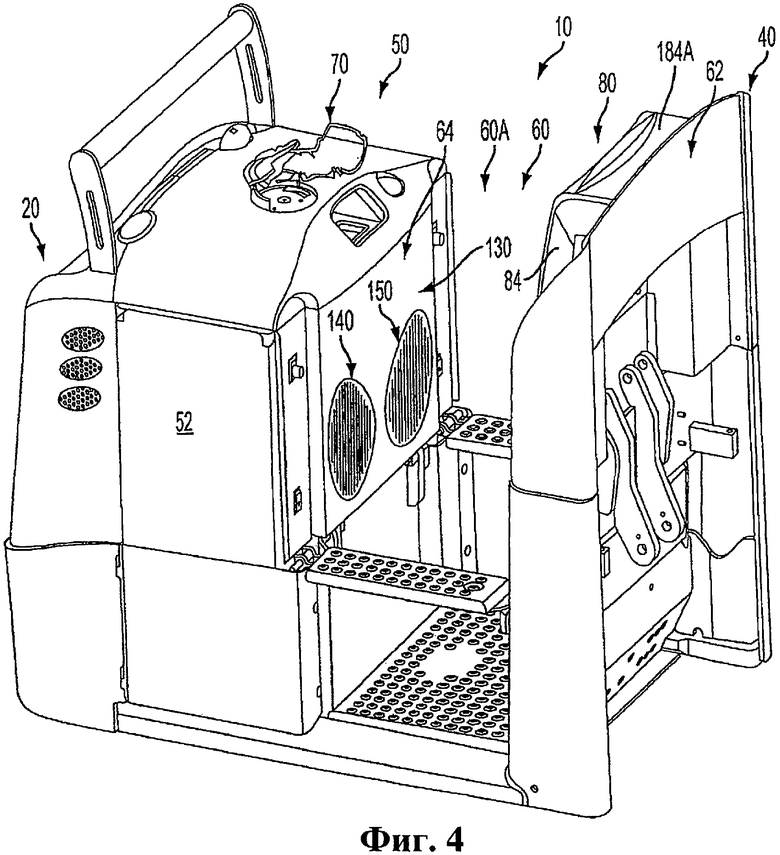
На фиг.4 и 5 показан вид в перспективе опорной стенки, силового агрегата и батарейного отсека, показанных на фиг.2.
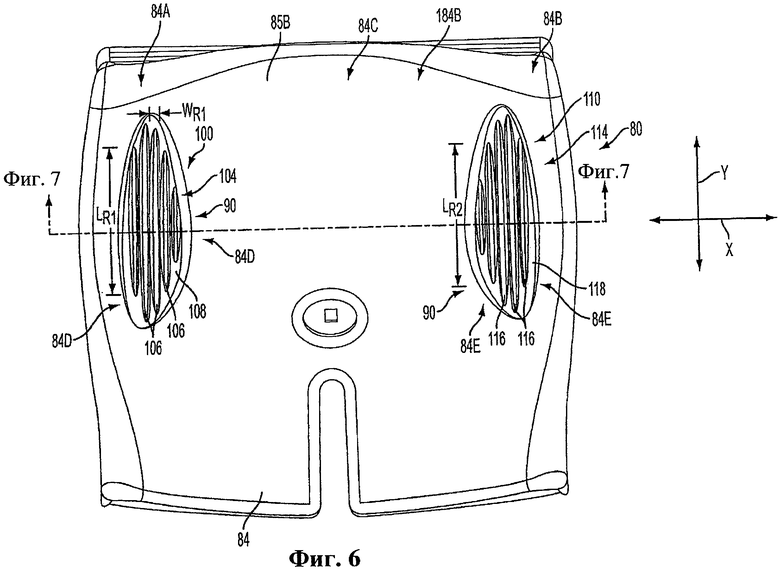
На фиг.6 показан вид спереди спинки опоры оператора, показанной на фиг.3.
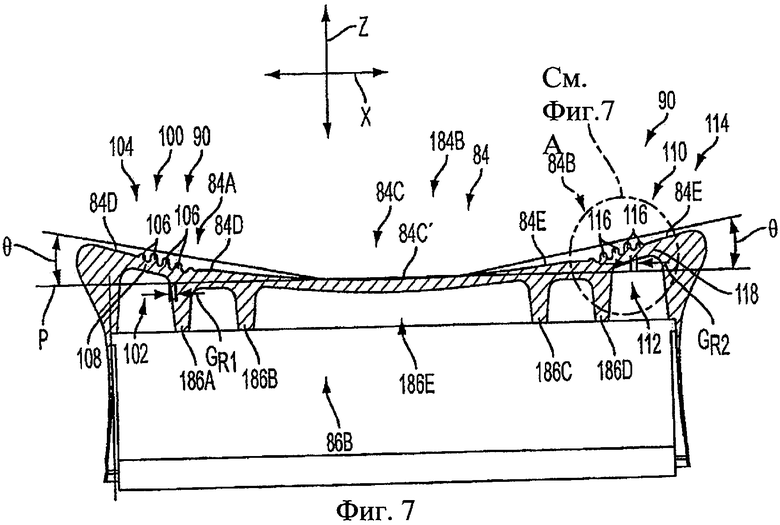
На фиг.7 показан разрез по линии 7-7 фиг.6.
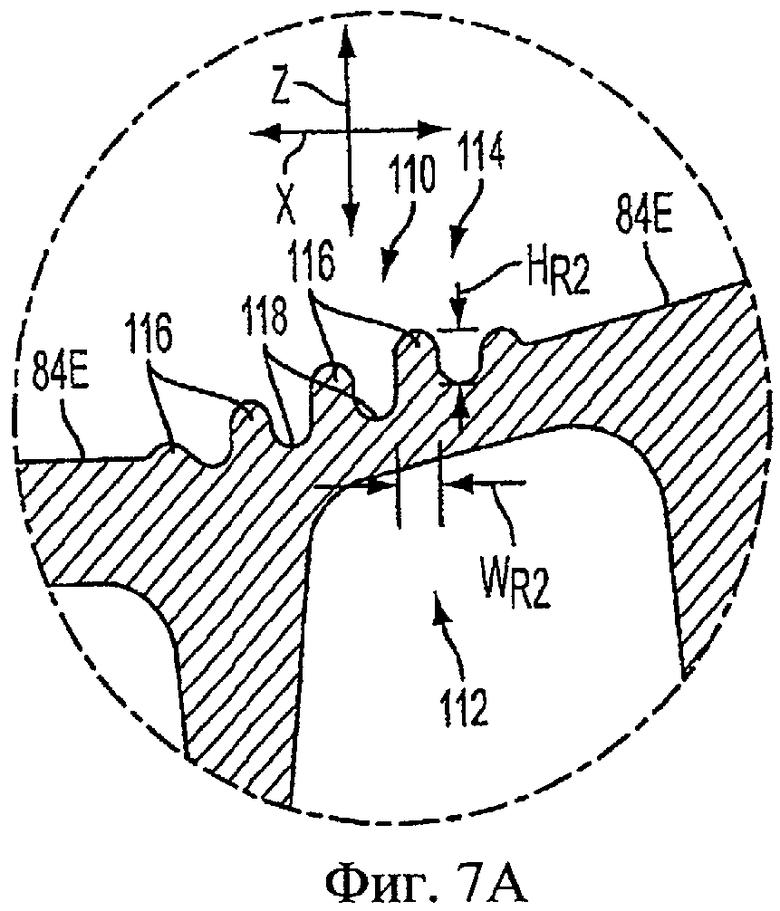
На фиг.7А показан с увеличением участок спинки опоры оператора, показанной на фиг.7.
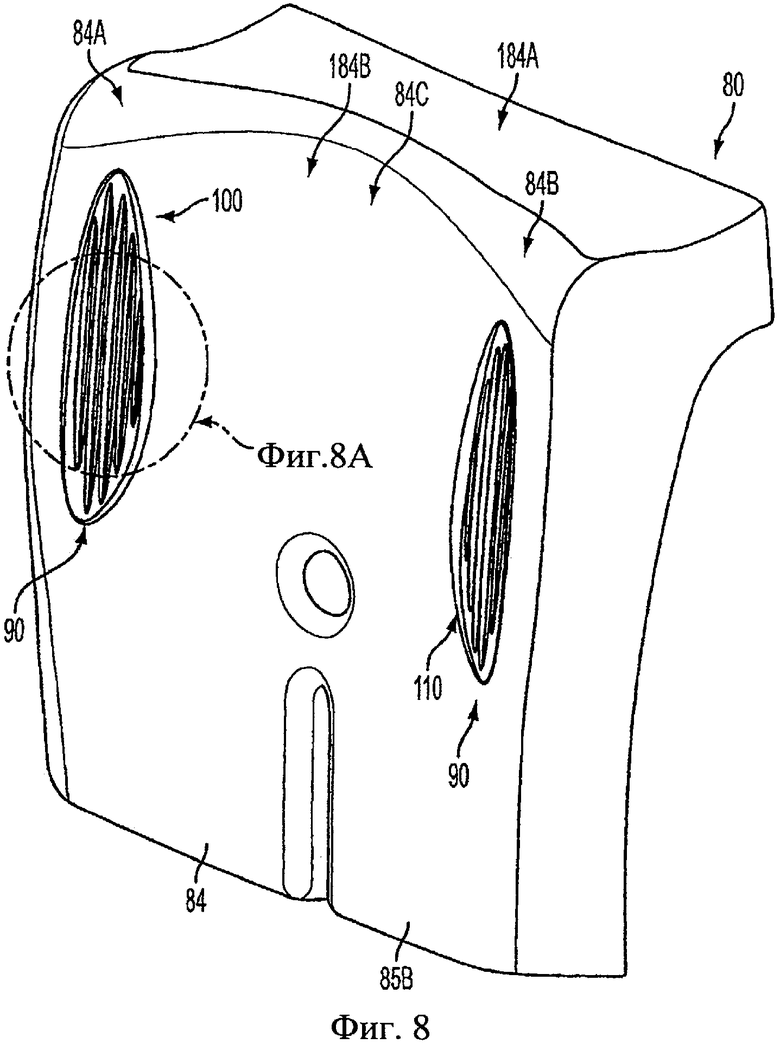
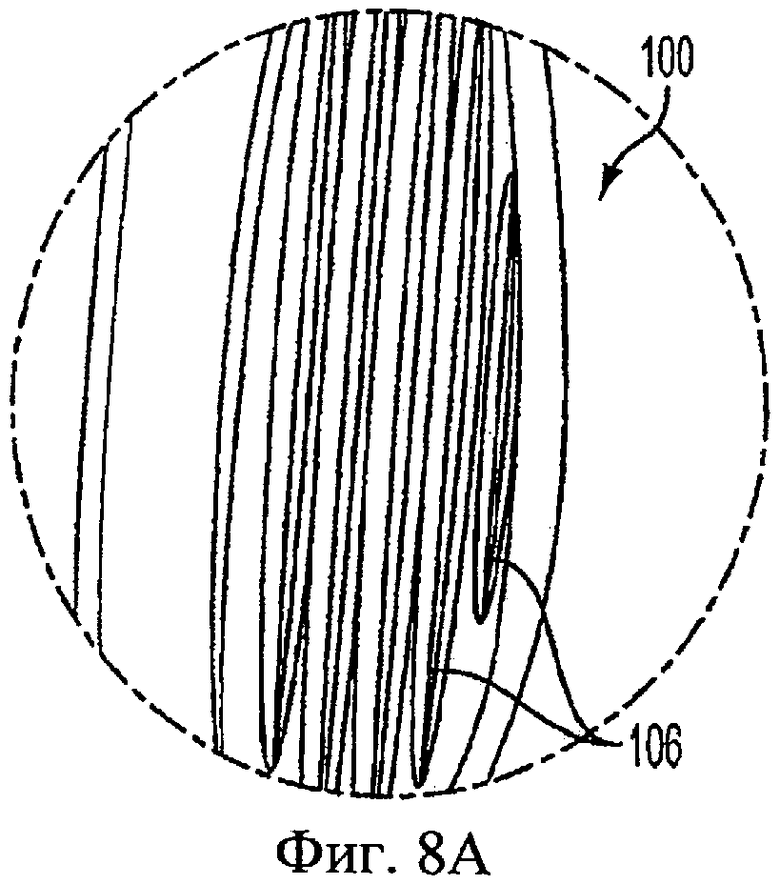
На фиг.8 показан вид в перспективе спинки опоры оператора, показанной на фиг.6.
На фиг.8А показан с увеличением участок спинки опоры оператора, показанной на фиг.8.
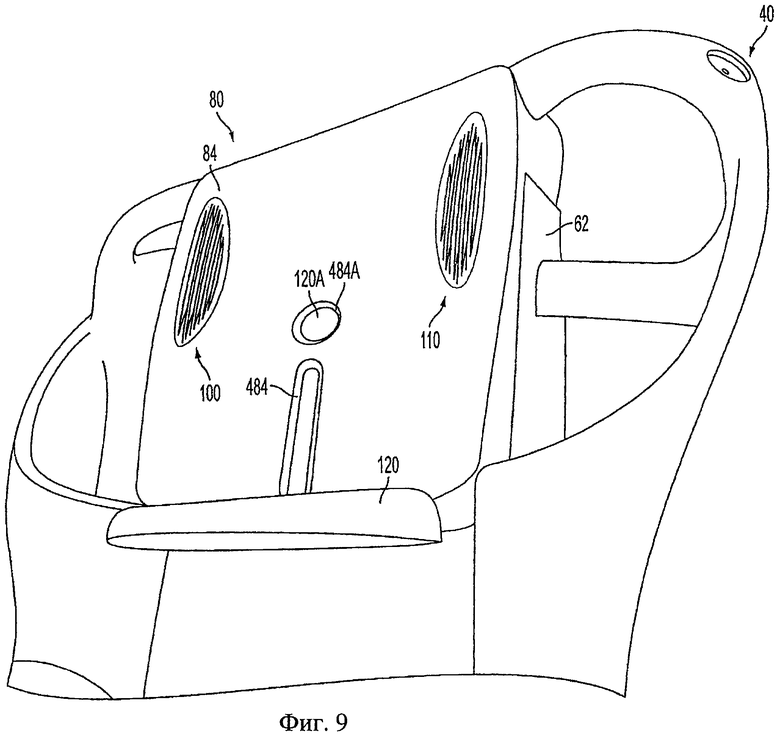
На фиг.9 показан вариант тележки для погрузки-разгрузки материалов, содержащей траверсу (perch) под спинкой опоры оператора, сконструированной в соответствии с настоящим изобретением.
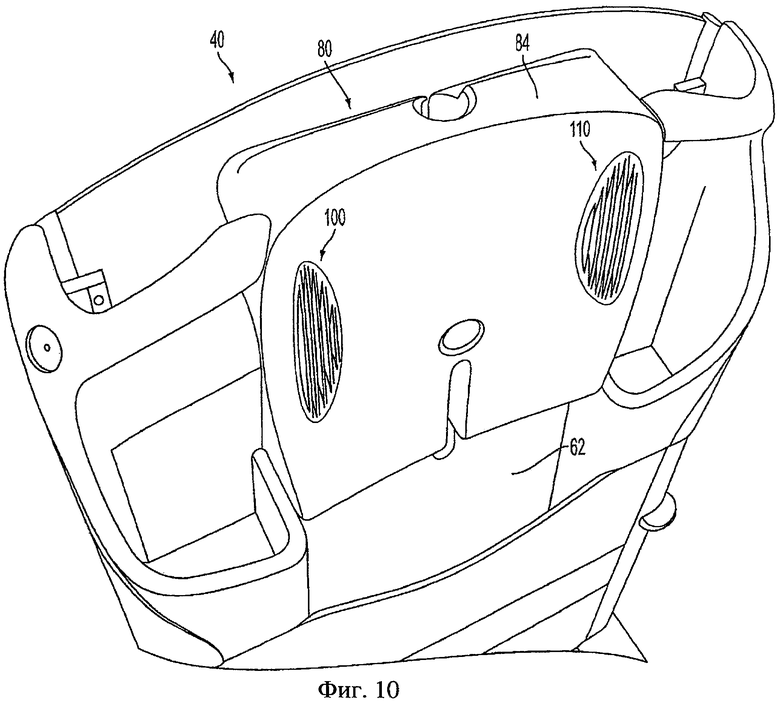
На фиг.10 показан вариант тележки для погрузки-разгрузки материалов со спинкой опоры оператора, сконструированной в соответствии с настоящим изобретением и не содержащей траверсы.
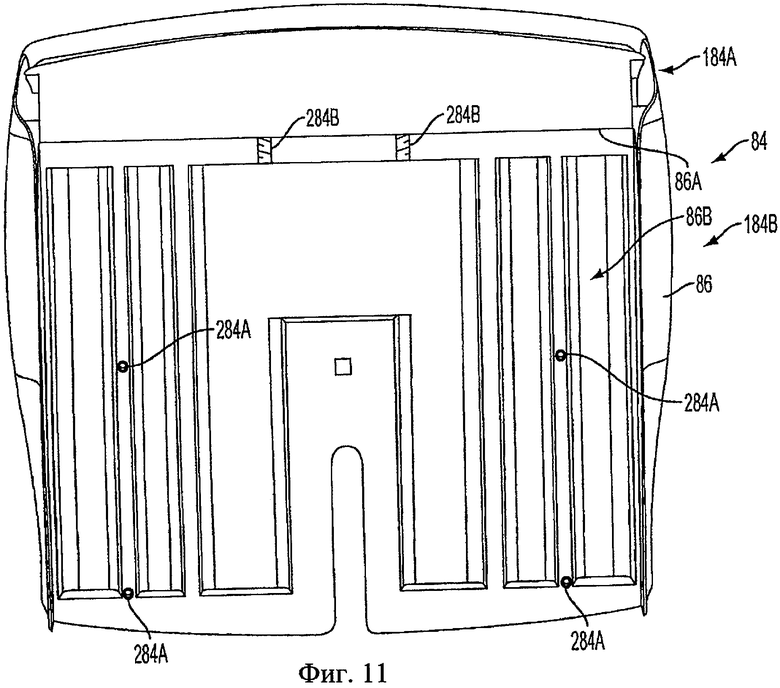
На фиг.11 показан вид сзади спинки опоры оператора, сконструированной в соответствии с первым вариантом осуществления настоящего изобретения, которая содержит болты и гайки для крепления спинки к первой стенке тележки для погрузки-разгрузки материалов.
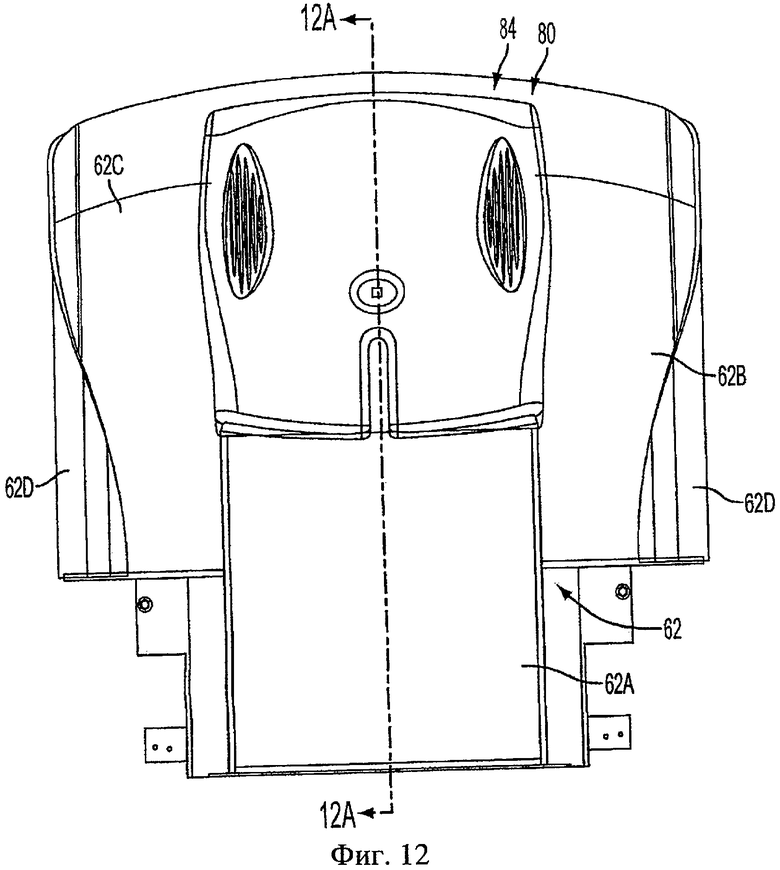
На фиг.12 показан вид спереди спинки опоры оператора, показанной на фиг.11, соединенной с первой стенкой тележки для погрузки-разгрузки материалов.
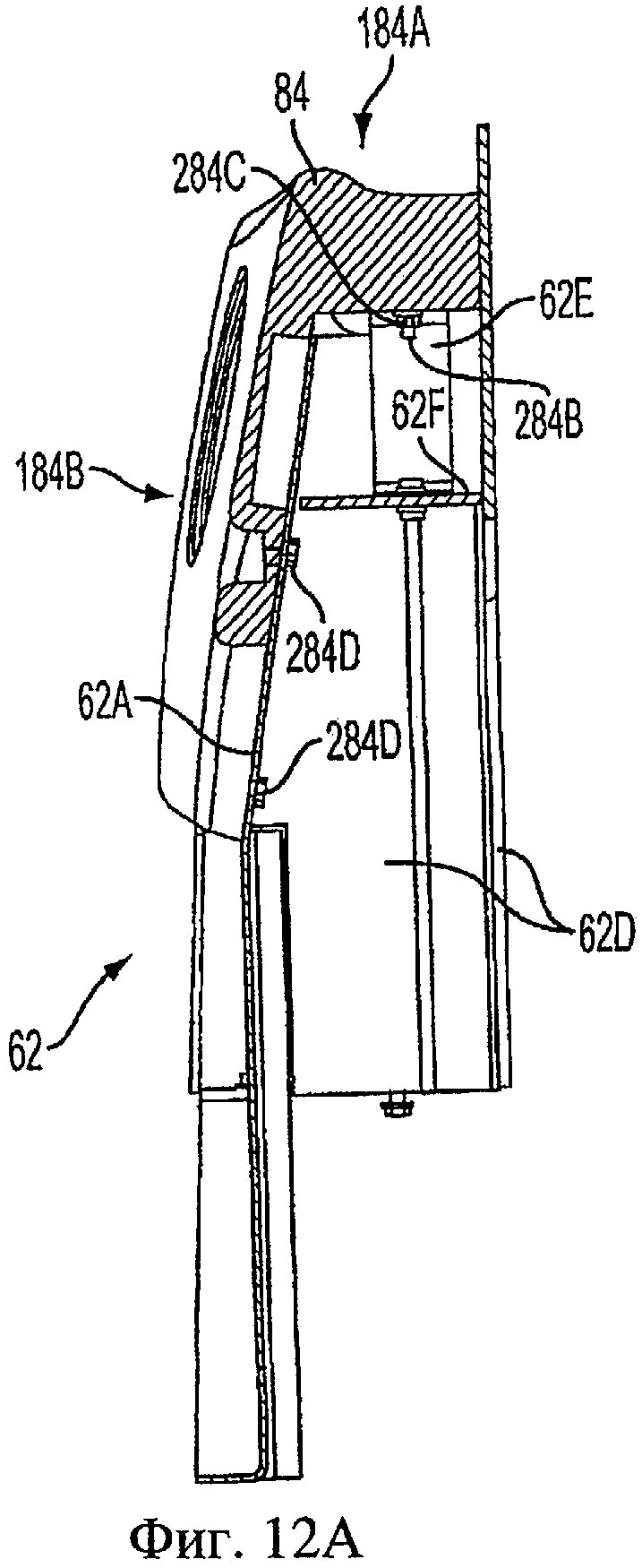
На фиг.12А показан разрез по линии 12А-12А фиг.12.
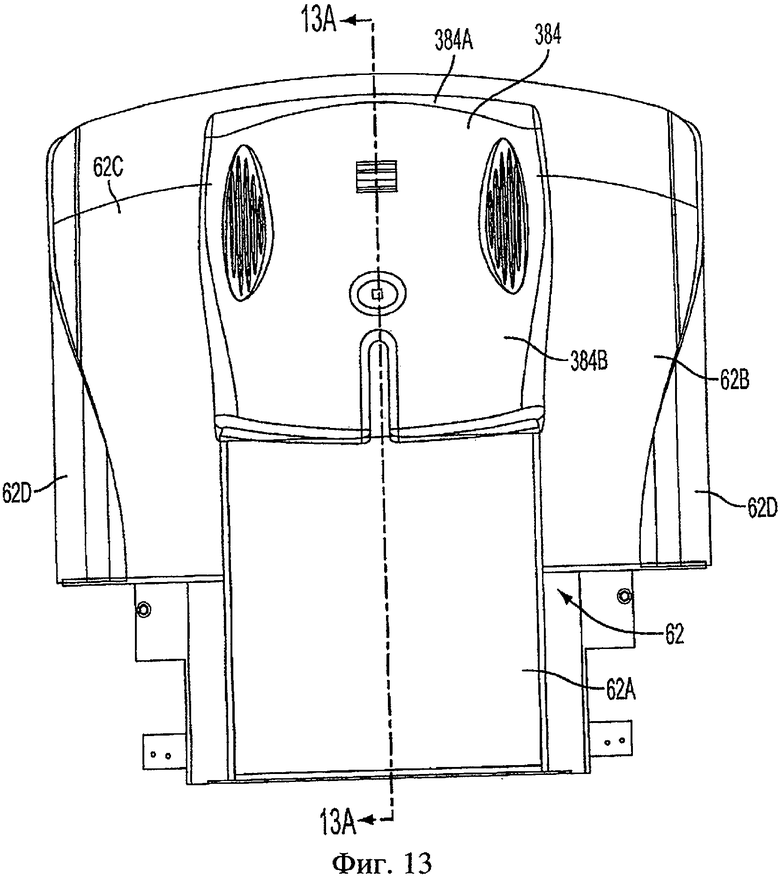
На фиг.13 показан вид спереди спинки опоры оператора, сконструированной в соответствии со вторым вариантом настоящего изобретения, которая содержит скобы для крепления спинки к первой стенке тележки для погрузки-разгрузки материалов.
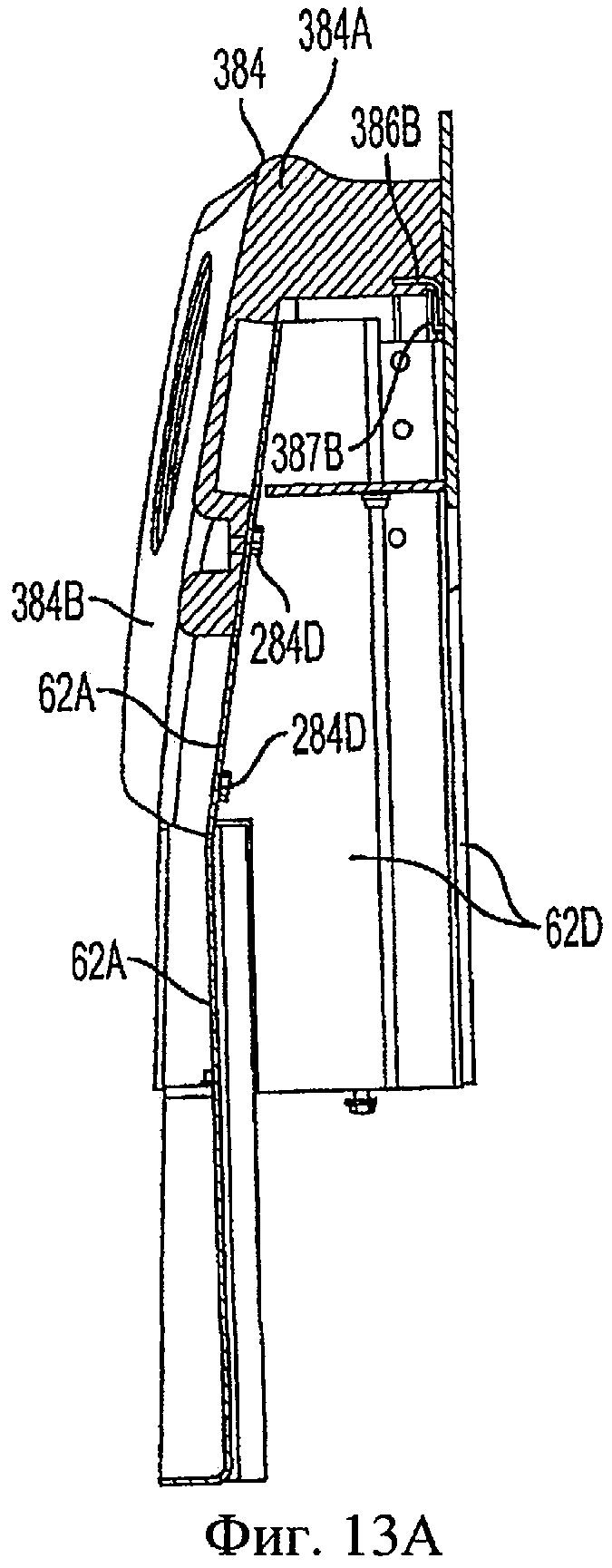
На фиг.13А показан разрез по линии 13А-13А фиг.13.
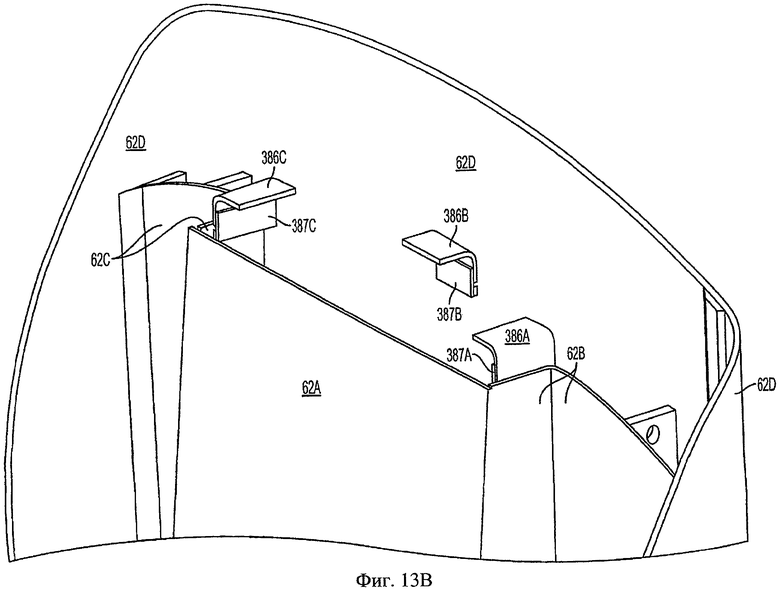
На фиг.13В показан вид в перспективе задней и боковых пластин первой стенки тележки для погрузки-разгрузки материалов, которые содержат кронштейны для приема скоб, запрессованные в опорную подушку спинки опоры оператора, показанной на фиг.13, причем скобы показаны, а верхняя секция опорной подушки не показана.
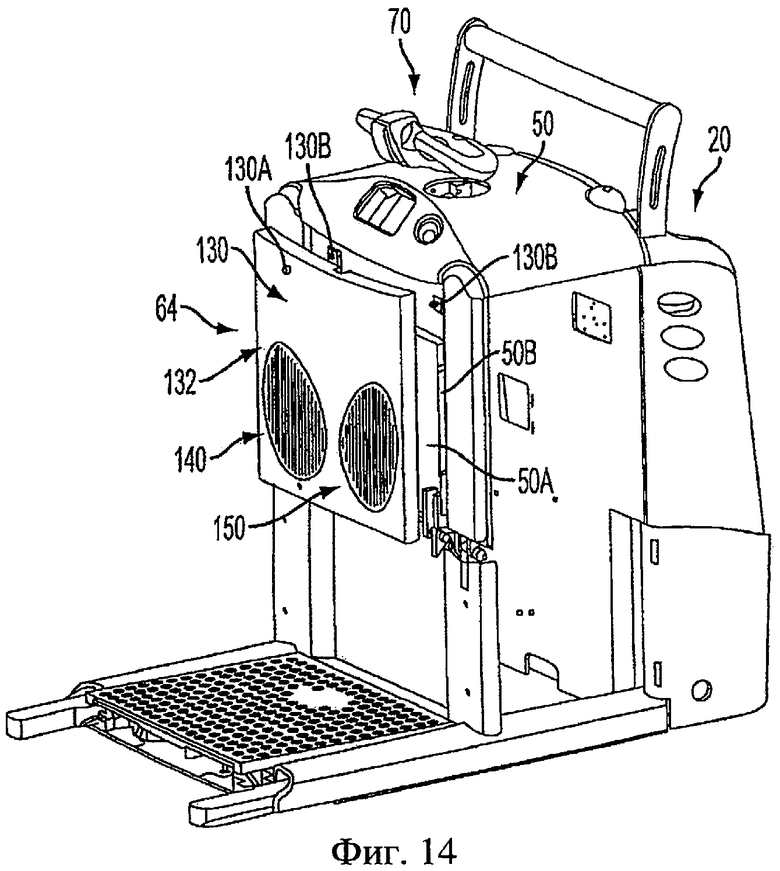
На фиг.14 показан вид в перспективе участка тележки для погрузки-разгрузки материалов, показанной на фиг.1, с матом, снабженным подушками опоры (для) колен, разделенными от стенки батарейного отсека.
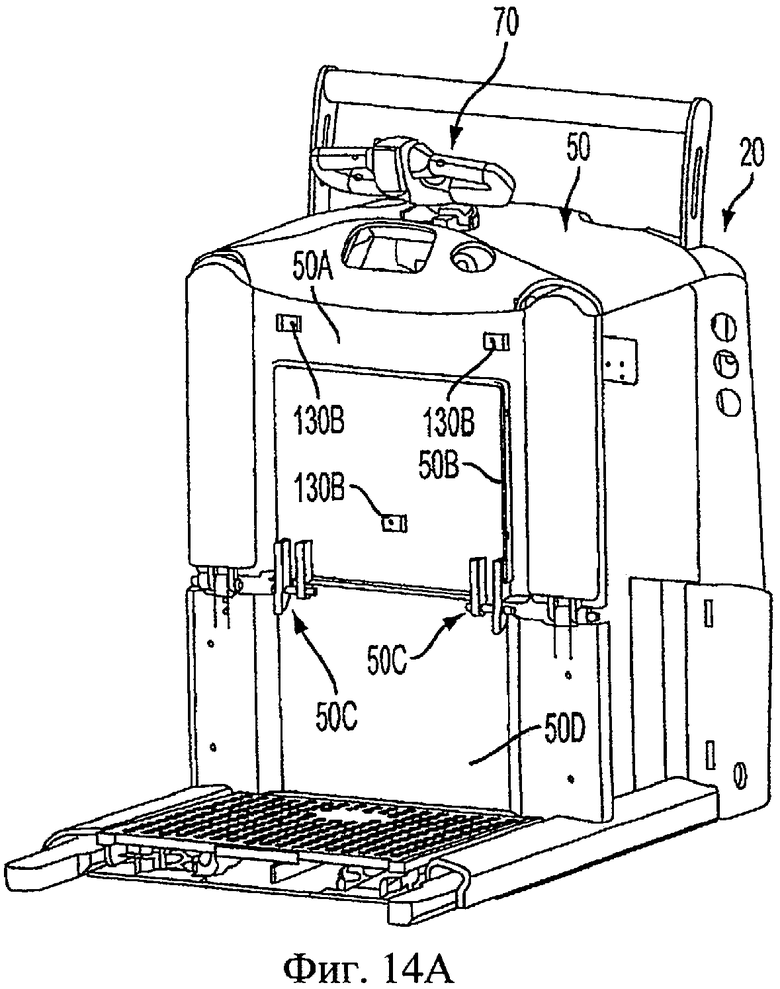
На фиг.14А показан вид в перспективе части тележки, показанной на фиг.14, причем мат не показан.
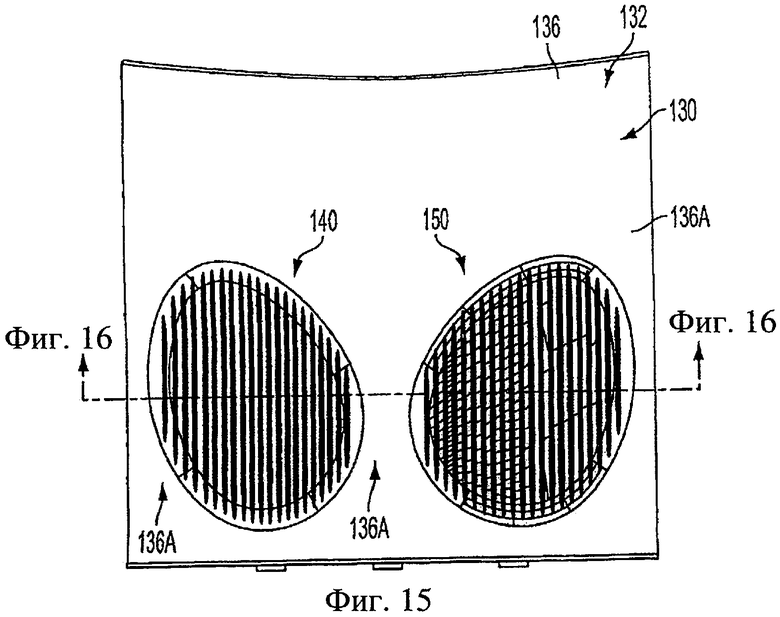
На фиг.15 показан вид с передней стороны мата, снабженного подушками опоры (для) колен, показанного на фиг.14.
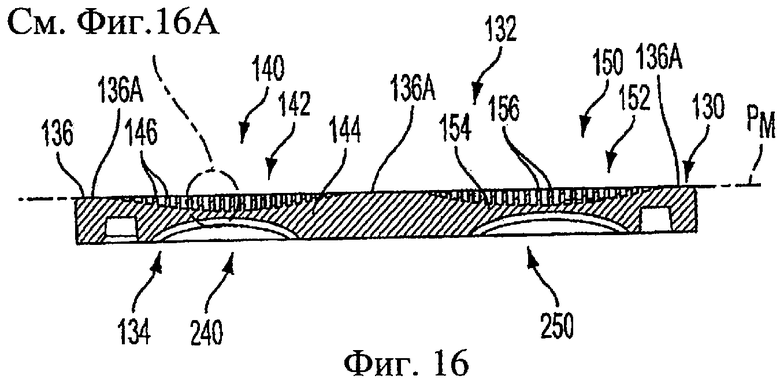
На фиг.16 показан разрез по линии 16-16 фиг.15.
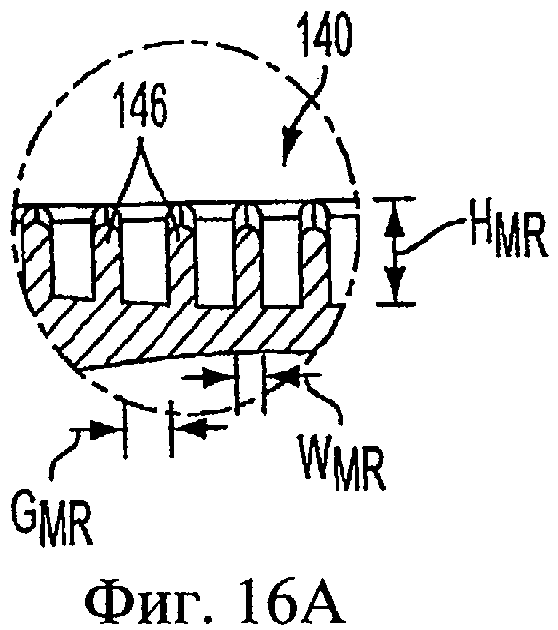
На фиг.16А показан с увеличением участок мата, показанного на фиг.16.
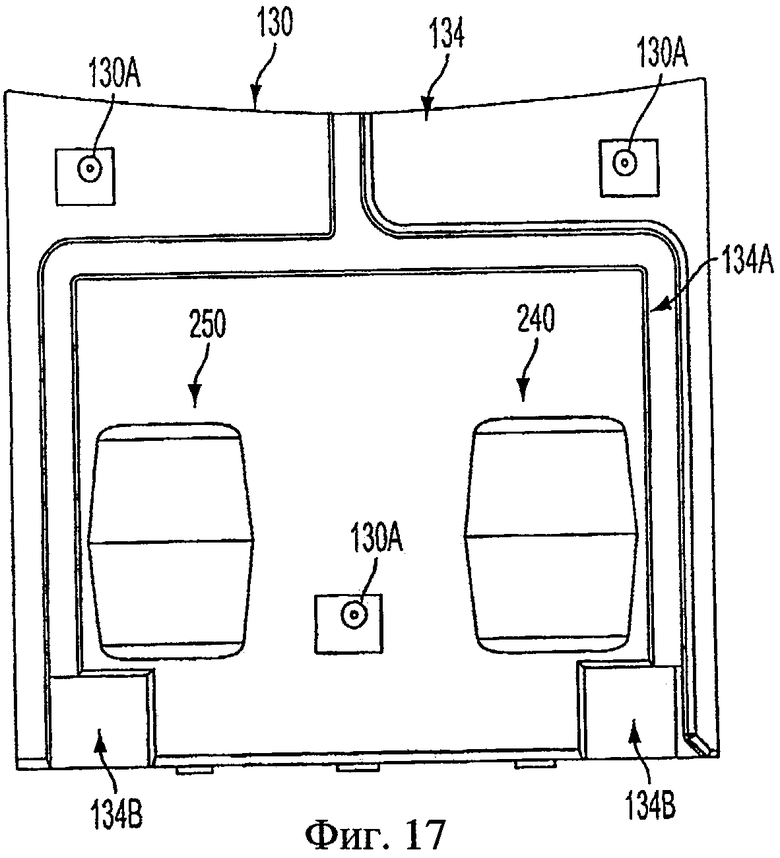
На фиг.17 показан вид с задней стороны мата, показанного на фиг.14.
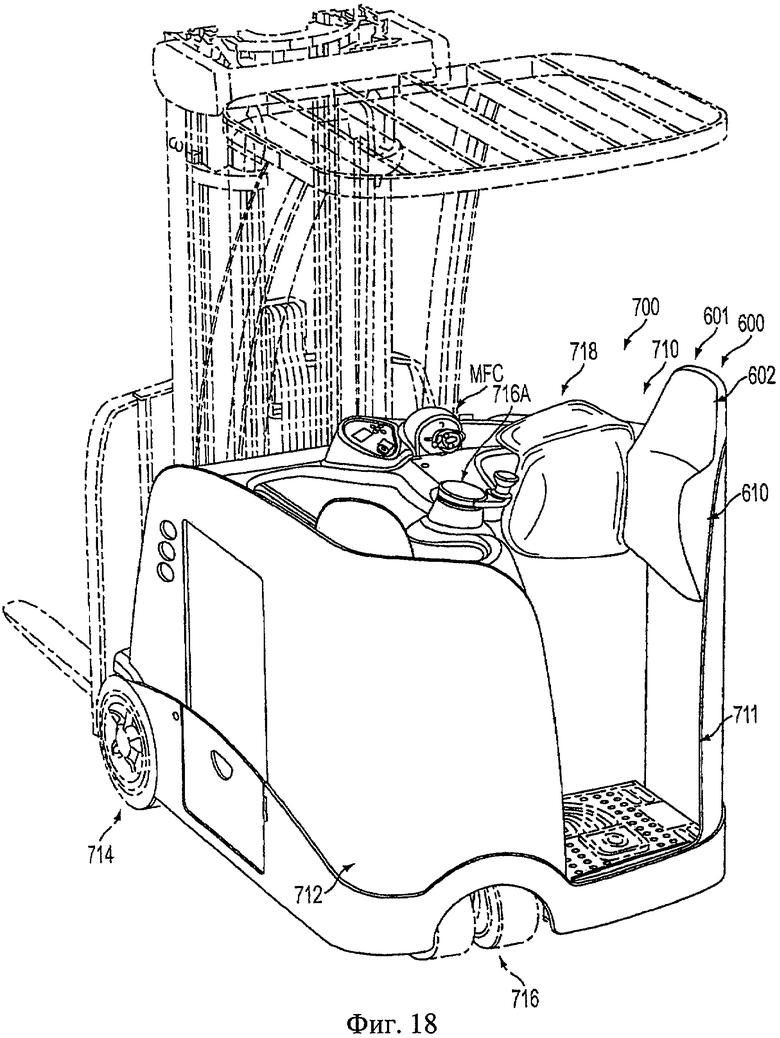
На фиг.18 показан вид в перспективе спинки, сконструированной в соответствии с еще одним вариантом настоящего изобретения, установленной в вертикальный уравновешенный автопогрузчик.
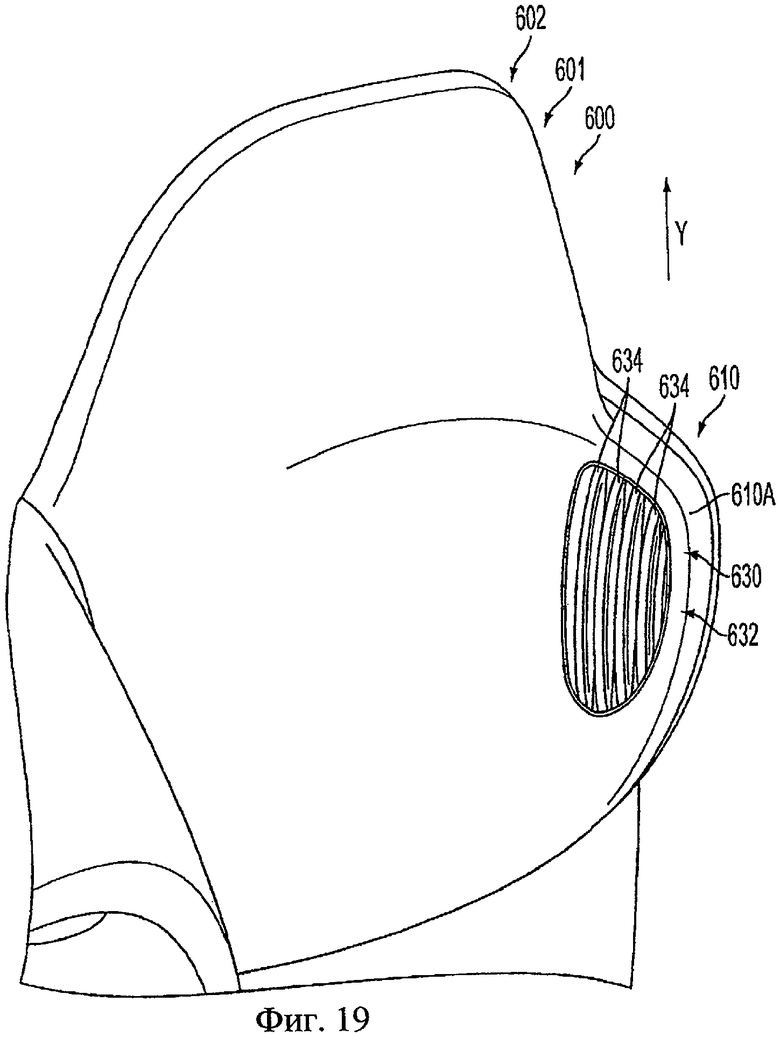
На фиг.19 показан вид в перспективе спинки, показанной на фиг.18.
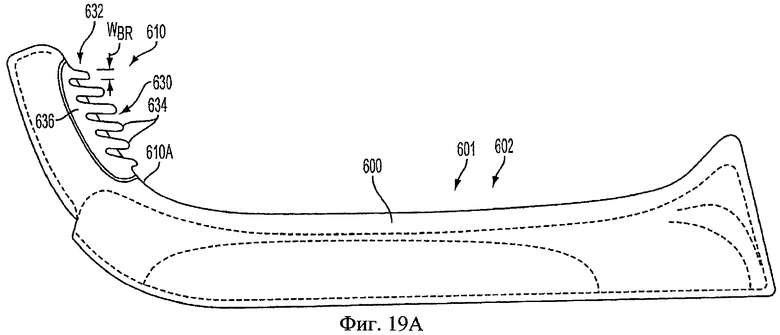
На фиг.19А показан вид сверху спинки, показанной на фиг.19.
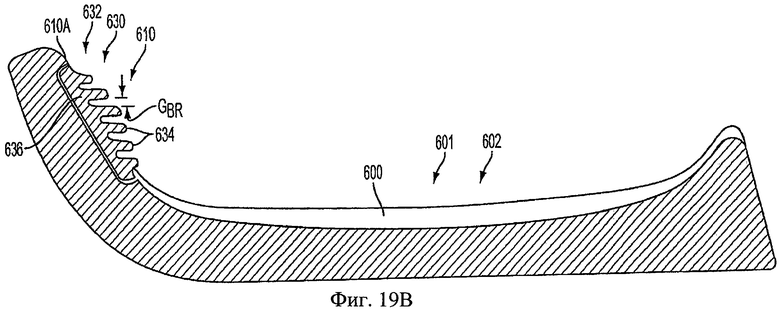
На фиг.19В показано поперечное сечение спинки, показанной на фиг.19.
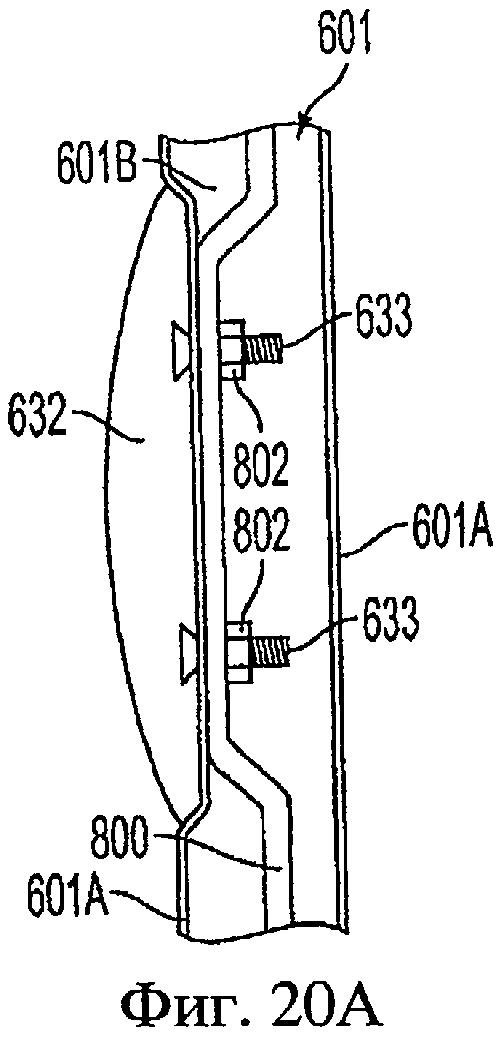
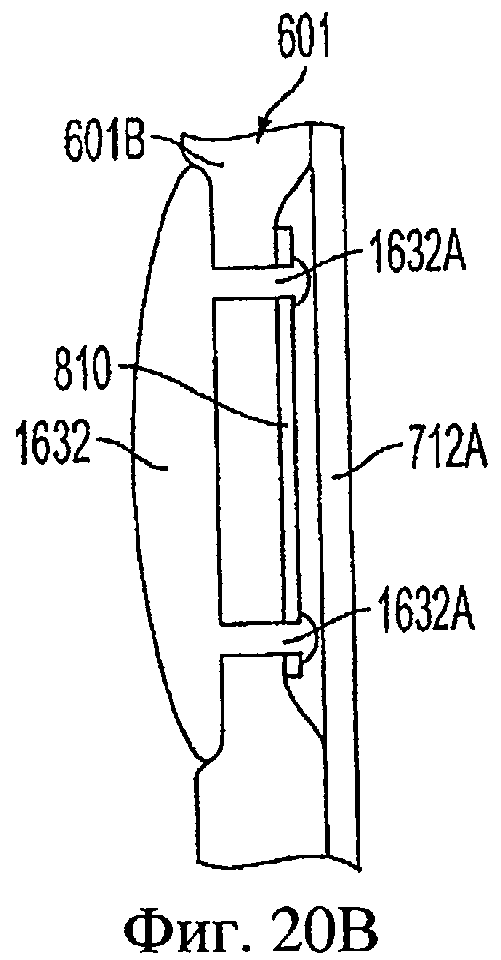
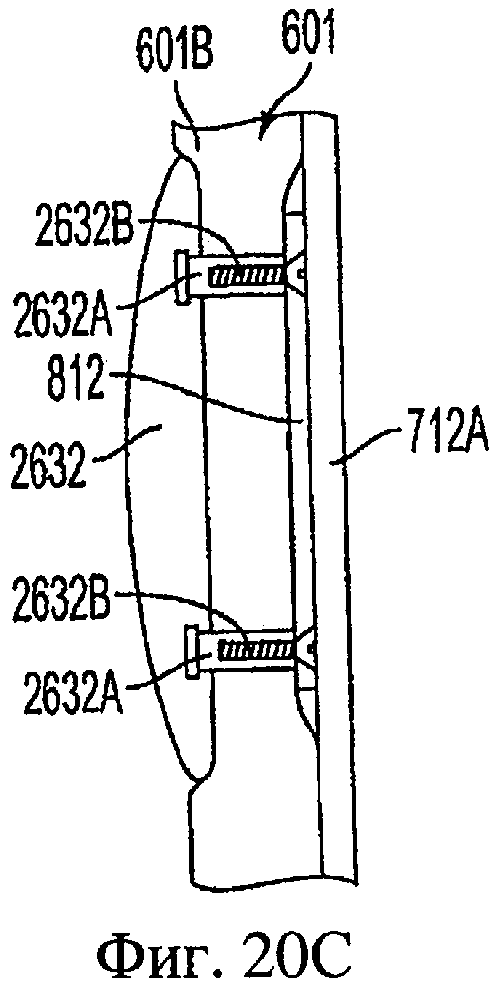
На фиг.20А-20С показаны первый, второй и третий варианты соединения основного корпуса устройства захвата с первичной опорной подушкой.
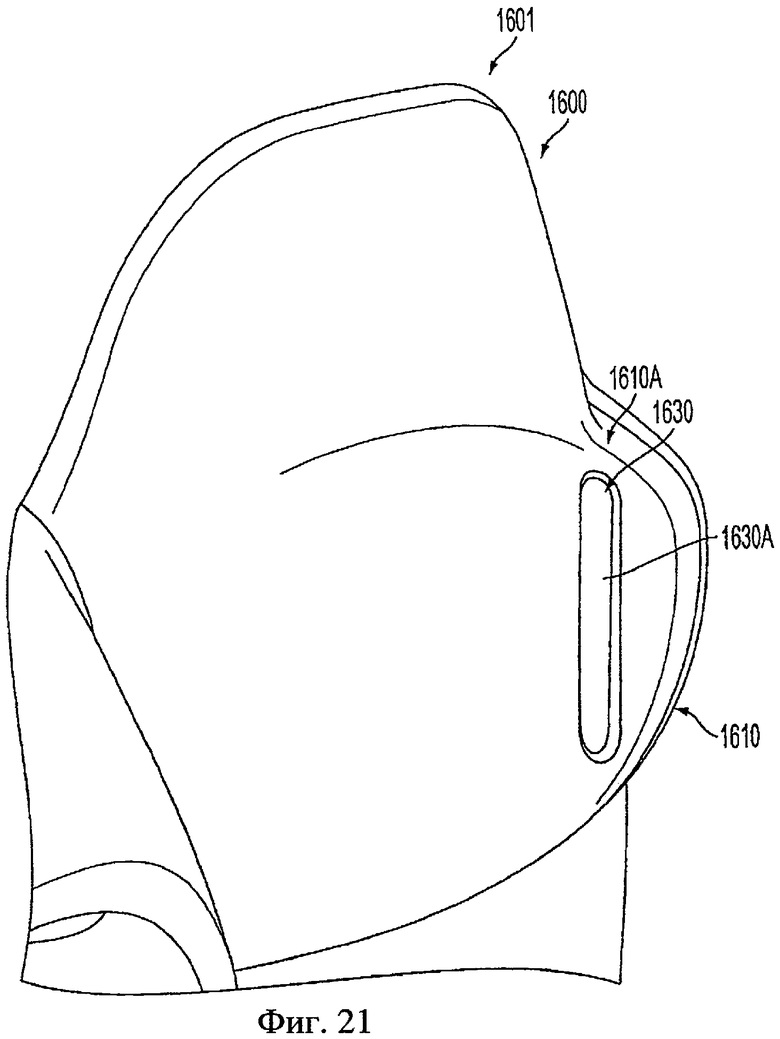
На фиг.21 показан вид в перспективе спинки, сконструированной в соответствии с еще одним вариантом настоящего изобретения.
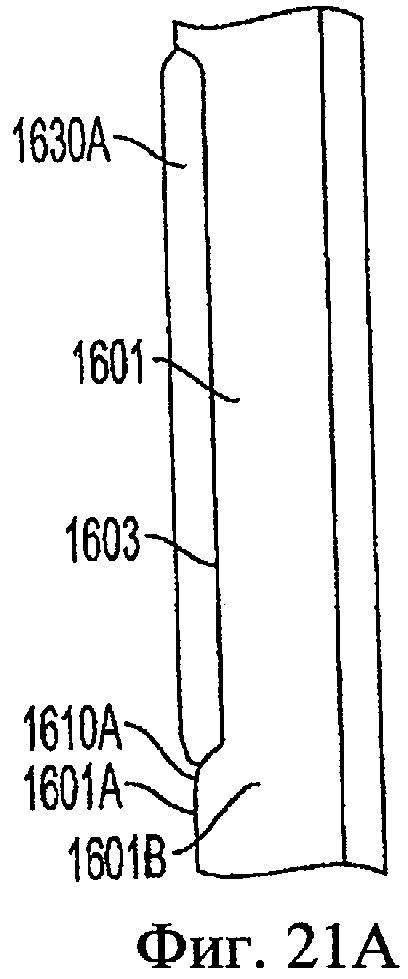
На фиг.21А показано поперечное сечение спинки, показанной на фиг.21.
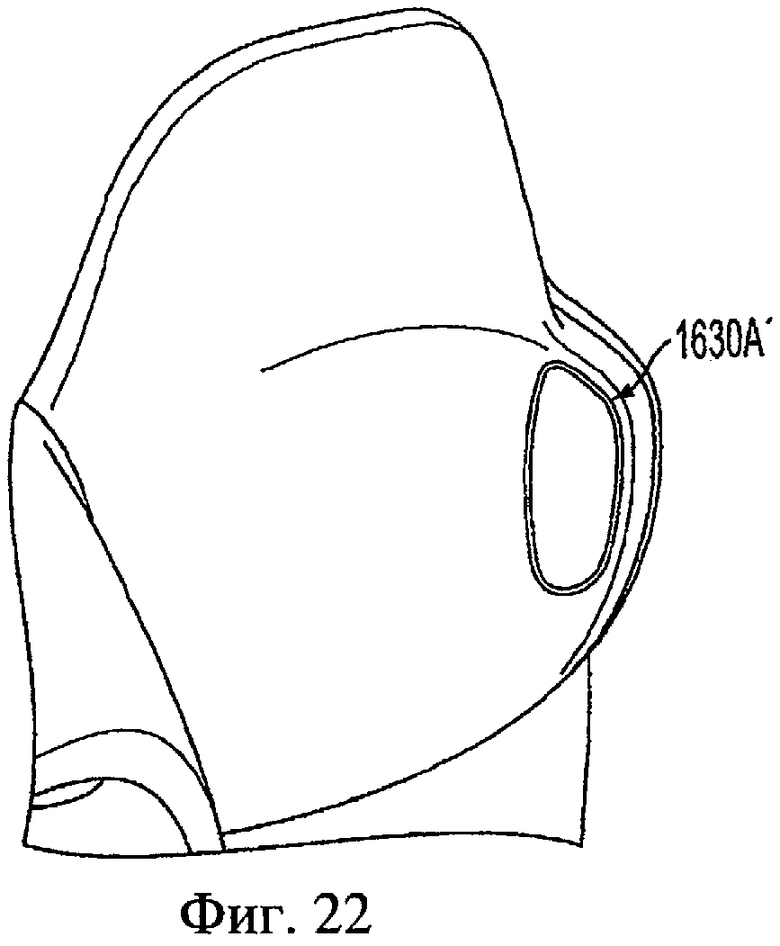
На фиг.22 показан вид в перспективе спинки, сконструированной в соответствии с еще одним вариантом настоящего изобретения.
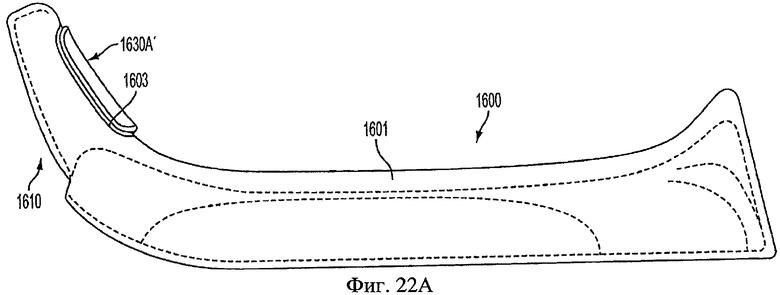
На фиг.22А показан вид сверху спинки, показанной на фиг.22.
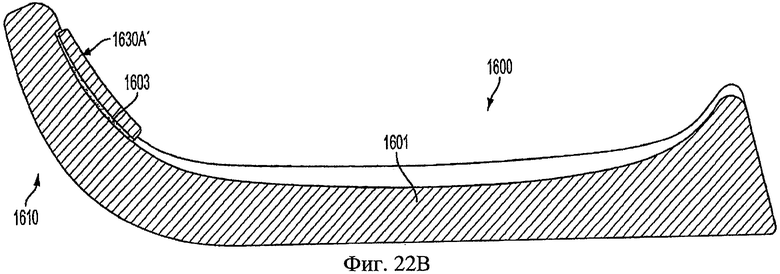
На фиг.22В показано поперечное сечение спинки, показанной на фиг.22.
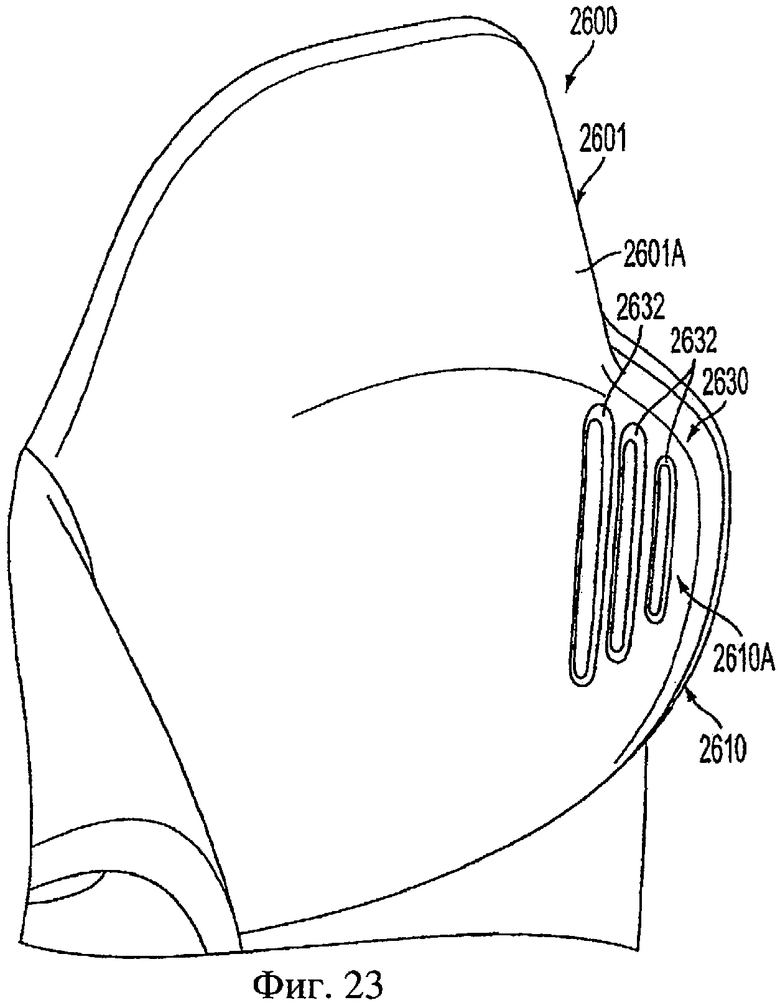
На фиг.23 показан вид в перспективе спинки, имеющей устройство захвата, которое содержит первое, второе и третье ребра.
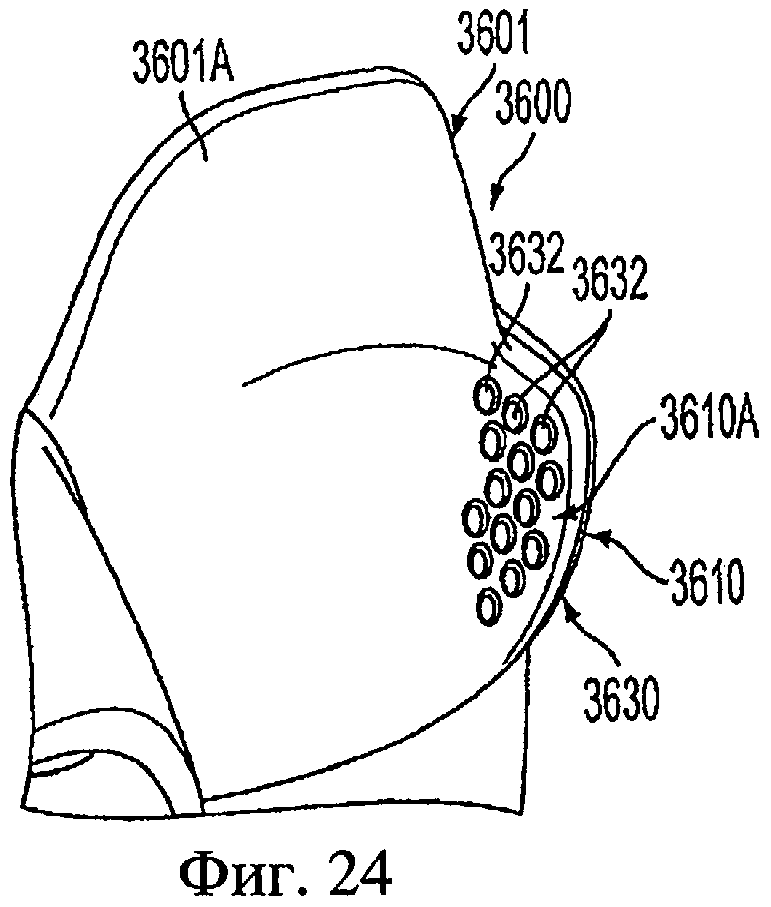
На фиг.24 показан вид в перспективе спинки, имеющей устройство захвата, которое содержит множество в целом круглых подушек захвата.
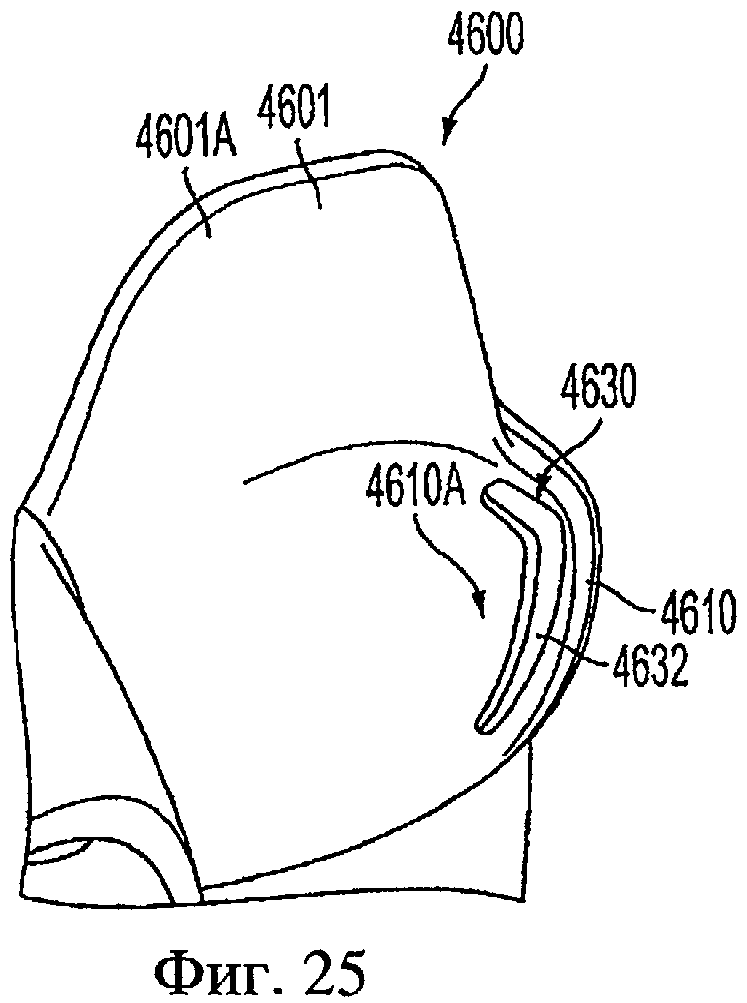
На фиг.25 показан вид в перспективе спинки, имеющей устройство захвата, которое содержит L-образное ребро.
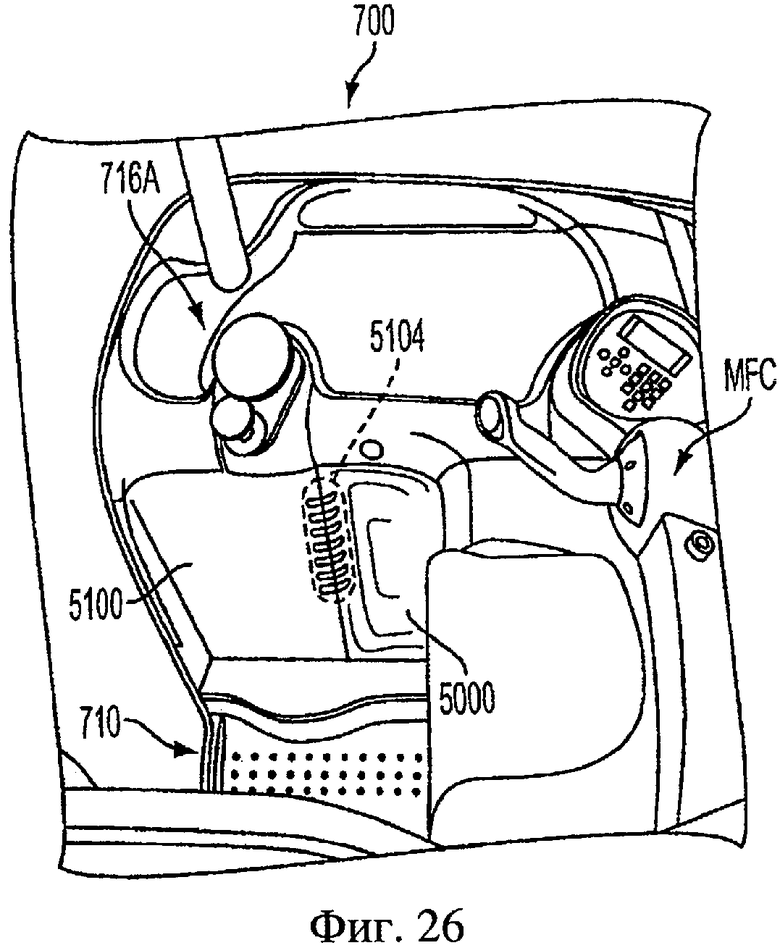
На фиг.26 показан вид сверху отсека оператора тележки, показанной на фиг.18.
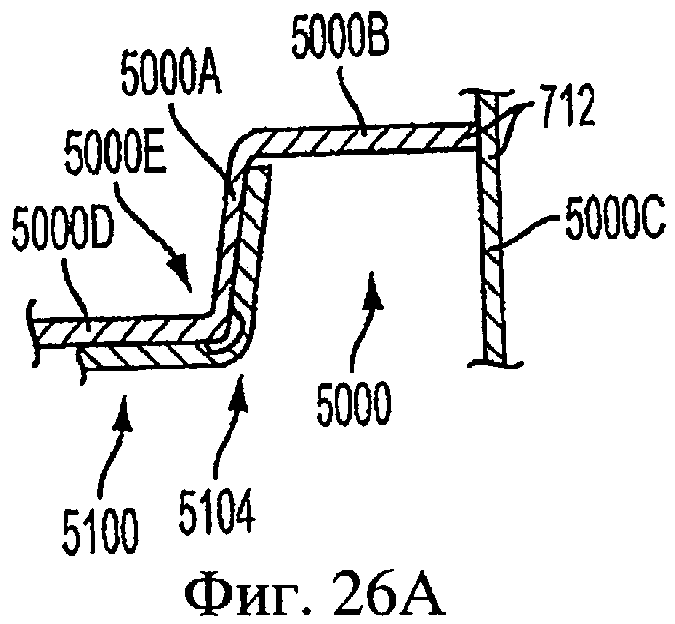
На фиг.26А показано поперечное сечение конструкции, образующей выемку для колена в отсеке оператора, показанном на фиг.26.
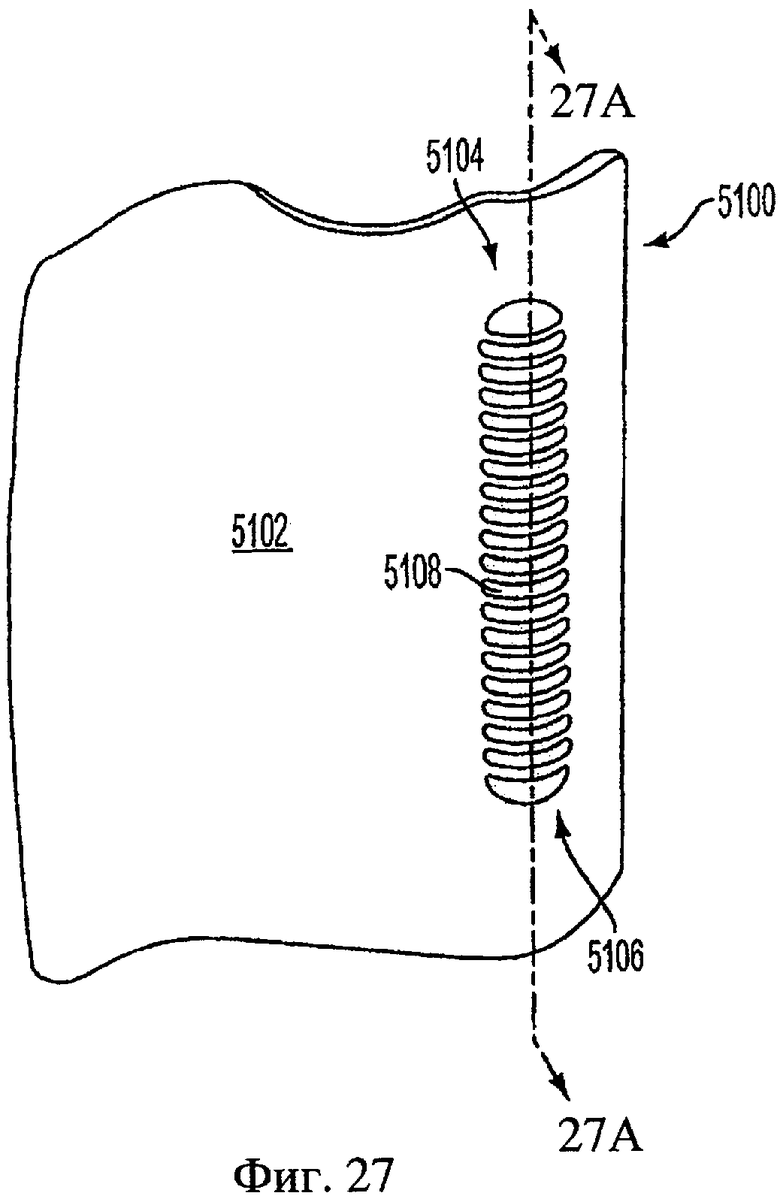
На фиг.27 показан вид в перспективе подушки для колена, предусмотренной в отсеке оператора, показанном на фиг.26.
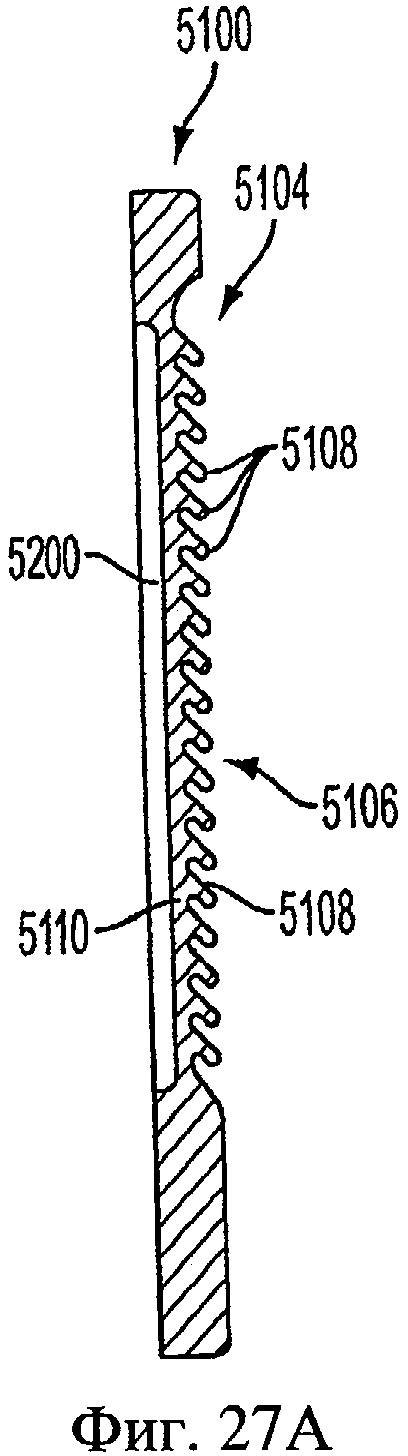
На фиг.27А показан разрез по линии 27А-27А фиг.27.
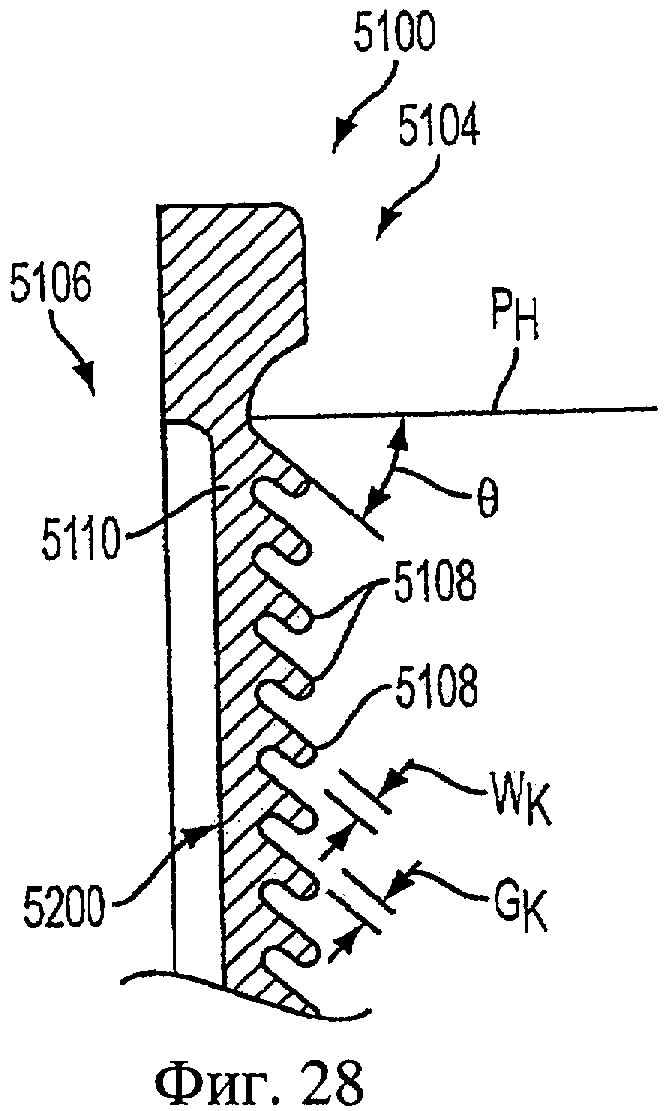
На фиг.28 показано с увеличением поперечное сечение участка подушки для колена, показанной на фиг.27.
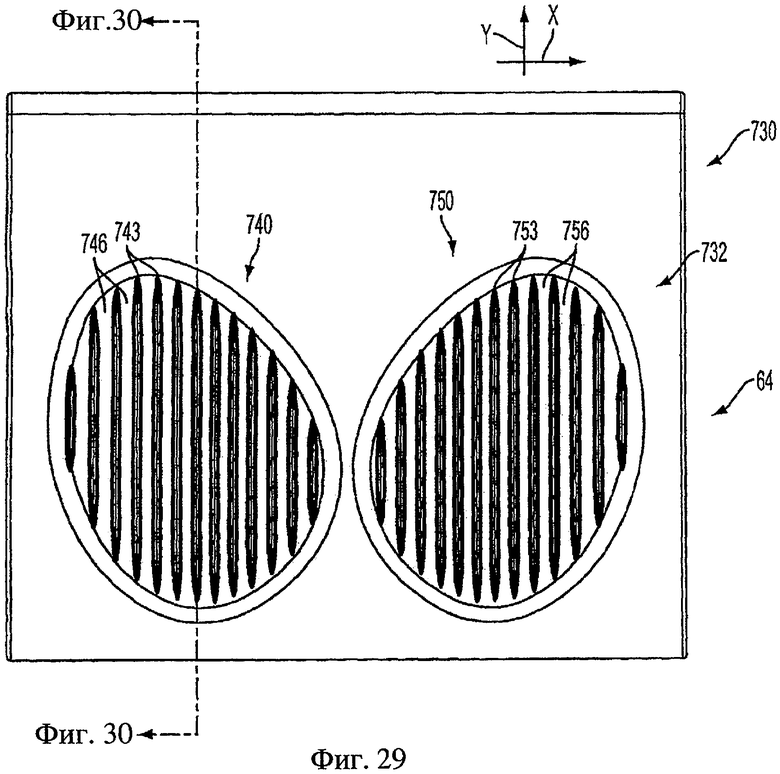
На фиг.29 показан вид с передней стороны мата, сконструированного в соответствии с дополнительным вариантом настоящего изобретения, причем мат образует вторую стенку отсека оператора в тележке, показанной на фиг.3.
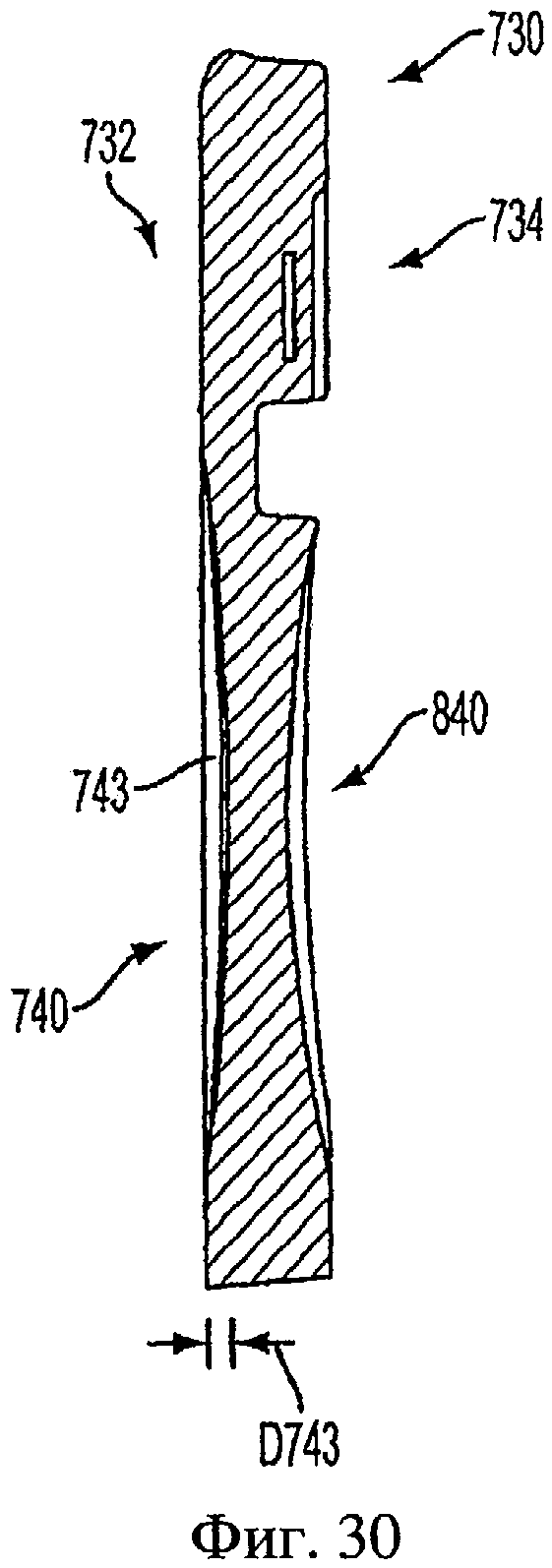
На фиг.30 показан разрез по линии 30-30 фиг.29.
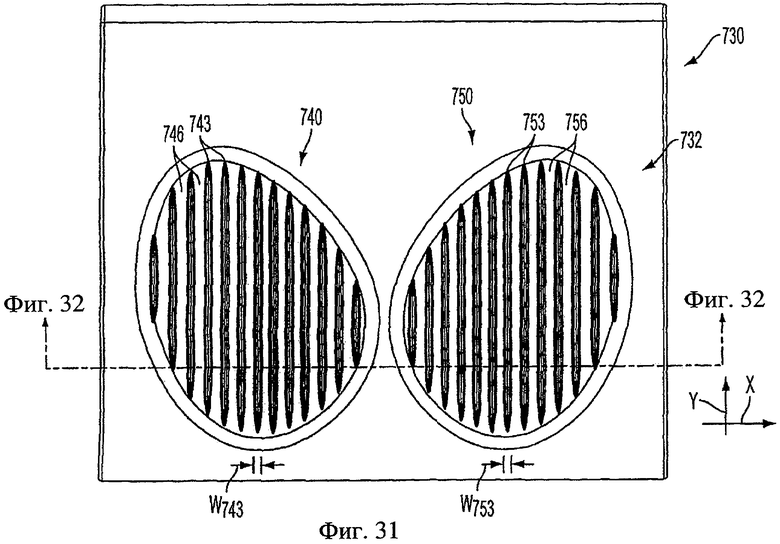
На фиг.31 показан вид спереди мата, показанного на фиг.29.
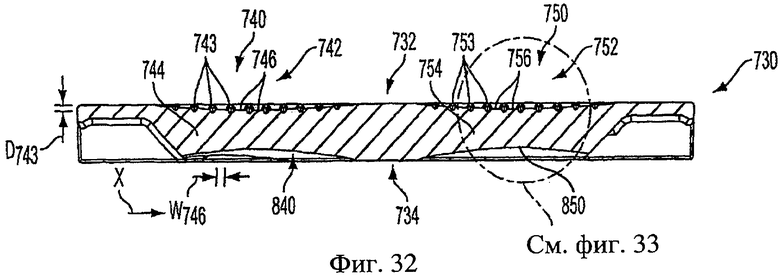
На фиг.32 показан разрез по линии 32-32 фиг.31.
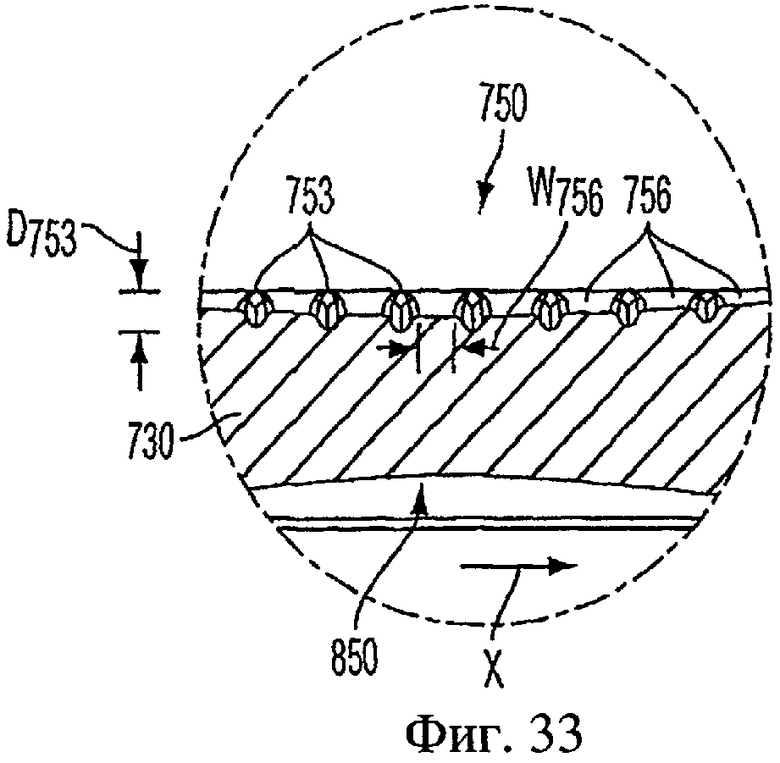
На фиг.33 показан увеличенный участок мата, показанного на фиг.32.
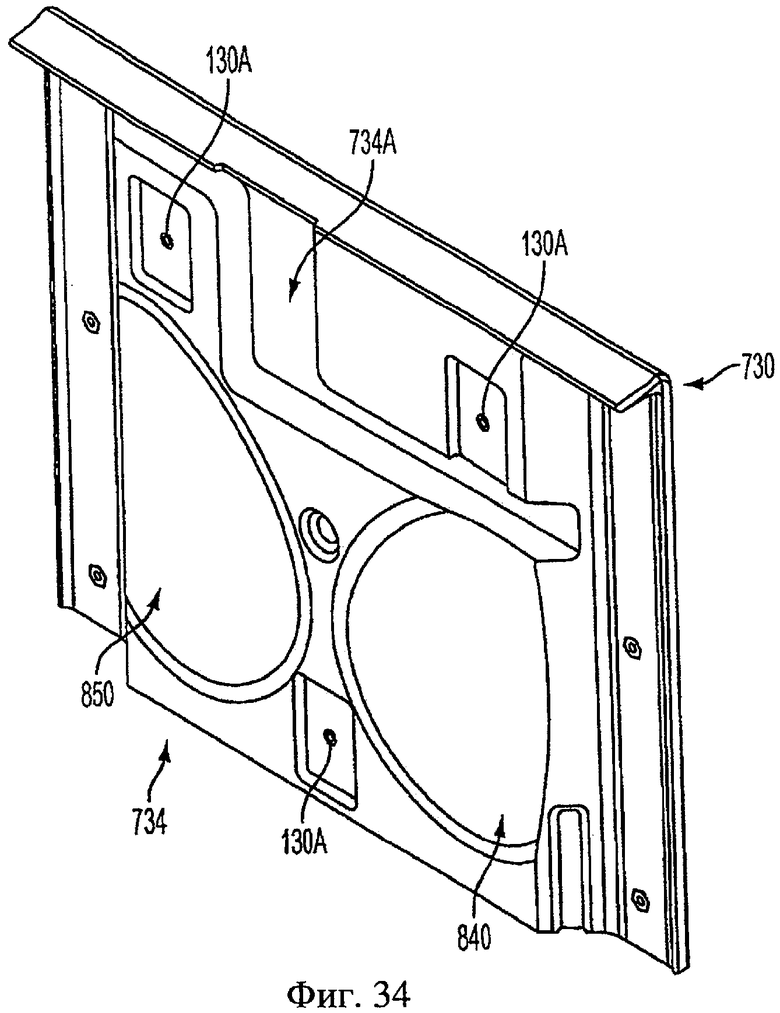
На фиг.34 показан вид в перспективе задней стороны мата, показанного на фиг.29.
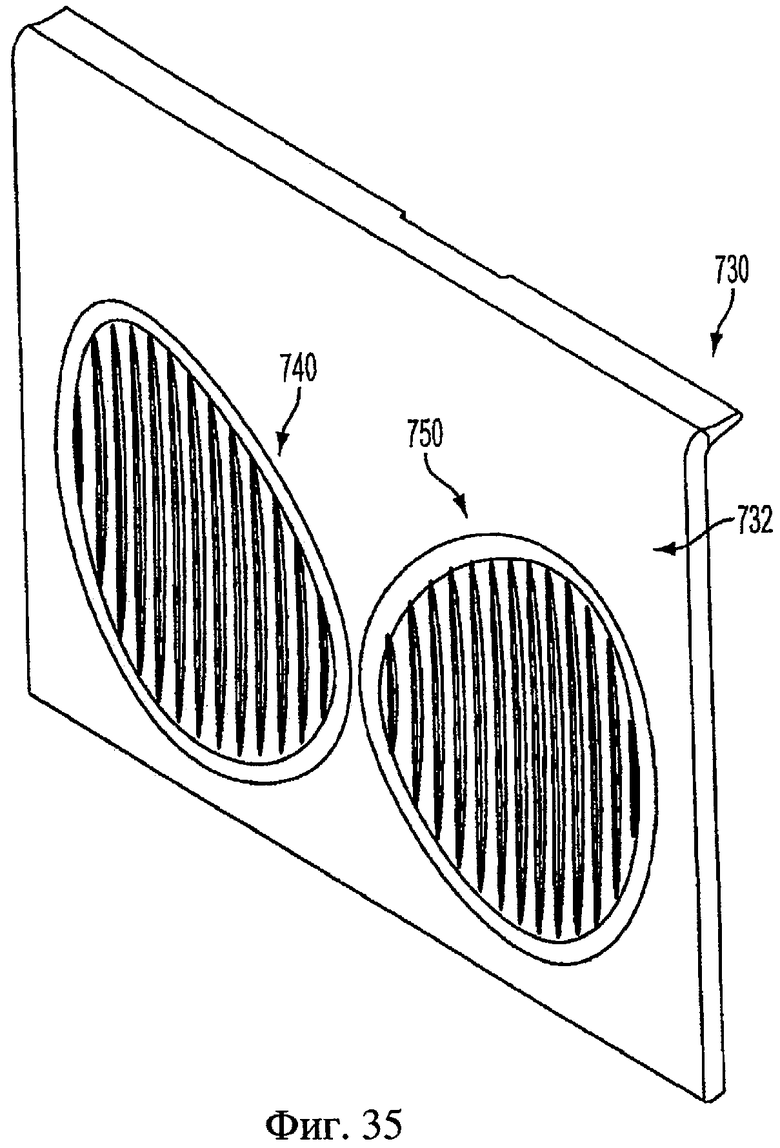
На фиг.35 показан вид в перспективе передней стороны мата, показанного на фиг.29.
Подробное описание изобретения
Обратимся теперь к рассмотрению фиг.1, на которой показана тележка 10 для погрузки-разгрузки материалов, которая содержит отборник (picker), расположенный на низком уровне. Тележка 10 содержит силовой агрегат 20, содержащий узел тягового двигателя/тормоза (не показан), соединенный с ведущим колесом 22, см. фиг.2, для осуществления вращения и торможения ведущего колеса 22. Ведущее колесо 22 расположено под силовым агрегатом 20. Неприводное самоориентирующееся колесо (не показано) также расположено под силовым агрегатом 20. Двигатель рулевого управления (не показан) предусмотрен в силовом агрегате 20 для поворота ведущего колеса 22, то есть для того, чтобы управлять направлением движения тележки 10. Гидравлический насос/двигатель (не показан) также расположен в силовом агрегате 20 и служит для подачи рабочей жидкости под давлением в блок поршня/цилиндра (не показан), для подъема и опускания первого и второго вилочных захватов 30 и 32 относительно опорной стенки (load backrest) 40. Вилочные захваты 30 и 32 показаны на фиг.1 на фиг.1 и 3, но не показаны на фиг.2, 4 и 5. Узел 30А, 32В колеса нагрузки соединен с каждым вилочным захватом 30, 32. Батарейный отсек 50, содержащий батарею 52, расположен рядом с силовым агрегатом 20. Батарея 52 снабжает энергией узел тягового двигателя/тормоза, двигатель рулевого управления и гидравлический насос/двигатель. Сквозной отсек 60 оператора расположен между батарейным отсеком 50 и опорной стенкой 40. Оператор, при нахождении в отсеке 60 оператора, может управлять скоростью, торможением, направлением движения тележки 10 и высотой вилочных захватов 30 при помощи рукоятки 70 управления.
Отсек 60 оператора может иметь противоположные первую и вторую стенки 62 и 64 и спинку 80, соединенную с первой стенкой 62, см. фиг.1-5. В показанном варианте спинка 80 содержит первичную опорную подушку 84, имеющую верхнюю и нижнюю секции 184А и 184В, объединенные друг с другом. Спинка 80 дополнительно содержит устройство 90 захвата, расположенное на первом и втором боковых участках 84А и 84В нижней секции 184В опорной подушки 84, см. фиг.5 и 6.
В соответствии с первым вариантом настоящего изобретения первичная опорная подушка 84 имеет внутреннюю поверхность 86, имеющую четыре запрессованные резьбовые вставки или гайки 284А, и два запрессованных болта (или две шпильки) 284В, см. фиг.11. Гайки 284А запрессованы во внутреннюю поверхность 86В нижней секции 184В опорной подушки 84, в то время как болты 284В запрессованы во внутреннюю поверхность 86А верхней секции 184А опорной подушки 84, см. также фиг.12А. Первая стенка 62 отсека 60 оператора содержит центральную пластину 62А, боковые пластины 62В и 62С, соединенные с центральной пластиной 62А, и заднюю пластину 62D, которая образует заднюю сторону спинки 80 и изгибается вокруг, чтобы образовать боковые стороны спинки, и соединяется с боковыми пластинами 62В и 62С, см. фиг.1, 5 и 12. Кронштейн 62Е соединен с горизонтальной пластиной 62F, которая в свою очередь соединена с задней пластиной 62D, см. фиг.12А. Верхняя секция 184А первичной опорной подушки 84 соединена с кронштейном 62Е при помощи гаек 284С, навинченных на болты 284В, запрессованные в верхнюю секцию 184А опорной подушки 84 и выступающие вниз из нее. Нижняя секция 184В опорной подушки 84 соединена с центральной пластиной 62А при помощи болтов 284D, которые проходят через центральную пластину 62А и ввинчены в гайки 284А, запрессованные в нижнюю секцию 184В.
В соответствии со вторым вариантом настоящего изобретения первичная опорная подушка 384 образована главным образом аналогично опорной подушке 84, показанной на фиг.11, 12 и 12А, за исключением того, что она содержит три запрессованные скобы 386А-386С вместо запрессованных шпилек или болтов 284В, для крепления верхней секции 384А опорной подушки 384 к первой стенке 62, см. фиг.13, 13А и 13В. Каждая скоба 386А-386С имеет L-образную форму, см. фиг.13В. Верхняя секция 384А опорной подушки 384 не показана на фиг.13В. Скоба 386А входит в зацепление с соответствующим кронштейном 387А, соединенным с боковой пластиной 62В, скоба 386В входит в зацепление с соответствующим кронштейном 387В, см. фиг.13А и 13В, прикрепленным к задней пластине 62D, а скоба 386С входит в зацепление с соответствующим кронштейном 387С, соединенным с боковой пластиной 62С. Как и в варианте, показанном на фиг.11, опорная подушка 384 содержит гайки 284А, запрессованные во внутреннюю поверхность нижней секции 384В опорной подушки 384. Таким образом, верхняя секция 384А первичной опорной подушки 384 соединена с боковыми пластинами 62В и 62С и с задней пластиной 62D при помощи скоб 386А-386С, которые входят в зацепление с соответствующими кронштейнами, соединенными с боковыми пластинами 62В и 62С и с задней пластиной 62D. Нижняя секция 384В опорной подушки 84 соединена с центральной пластиной 62А при помощи болтов 284D, которые проходят через центральную пластину 62А и ввинчены в гайки, запрессованные в нижнюю секцию 384В.
Внешняя поверхность 85В нижней секции 184В опорной подушки 84 имеет в целом криволинейную форму, см. фиг.5. Центральный участок 84С нижней секции 184В опорной подушки 84 расположен между первым и вторым боковыми участками 84А и 84В. Как это показано на фиг.7, первый и второй боковые участки 84А и 84В идут под углом ориентировочно меньше чем 45 градусов к плоскости Р, которая в целом является касательной к внешней поверхности 84С' центрального участка 84С нижней секции 184В опорной подушки. Следовательно, боковые участки 84А и 84В заходят только на минимальное расстояние в открытое пространство 60А, образованное между первой и второй стенками 62 и 64 отсека 60 оператора, см. фиг.2-5. Например, открытое пространство 60А может иметь ширину W от опорной подушки 84 до второй стенки 64 в диапазоне ориентировочно от 400 мм до 600 мм, а преимущественно около 475 мм, см. фиг.2. Следовательно, боковые участки 84А и 84В нижней секции 184В опорной подушки не существенно затрудняют движение оператора при входе в сквозной отсек 60 оператора и выходе из него.
Внутренняя поверхность 86В нижней секции 184В опорной подушки 84 содержит первое, второе, третье и четвертое опорные ребра 186A-186D, см. фиг.7, которые входят в зацепление с центральной пластиной 62А, когда подушка 84 установлена на первой стенке 62. Выемка 186Е образована между вторым и третьим опорными ребрами 186В и 186С, что делает опорную подушку 84 отчасти гибкой на центральном участке 84С, так что комфорт оператора улучшается, когда оператор откидывается на опорную подушку 84.
В показанном варианте устройство 90 захвата содержит соответственно первый и второй основные корпуса 100 и 110, см. фиг.5-10. Первый основной корпус 100 расположен на первом боковом участке 84А нижней секции 184В опорной подушки, в то время как второй основной корпус 110 расположен на втором боковом участке 84В нижней секции 184В опорной подушки. В показанном варианте первый и второй основные корпуса 100 и 110 выполнены в виде единого целого с опорной подушкой 84. Однако первый и второй основные корпуса 100 и 110 также могут быть выполнены как отдельные элементы, соединенные при помощи клея, крепежных средств и т.п. с опорной подушкой 84.
Первый основной корпус 100 имеет соответственно внутреннюю и внешнюю поверхности 102 и 104, см. фиг.6 и 7. Внутренняя поверхность 102 обращена к центральной пластине 62А, в то время как внешняя поверхность 104 видна оператору. Первый основной корпус 100 дополнительно содержит множество первых элементов 106, которые представляет собой ребра в показанном варианте, которые являются гибкими относительно первой базовой секции 108 первого основного корпуса 100. Ребра 106 могут иметь длину LR1 (длина LR1 только одного ребра 106 показана на фиг.6) в Y направлении, которая составляет ориентировочно от 60 мм до 170 мм, см. фиг.6. Ребра 106 также могут иметь ширину WR1 (ширина WR1 только одного ребра 106 показана на фиг.6) в Х направлении, которая составляет ориентировочно от 4 мм до 6 мм. Зазор GR1 (только один зазор GR1 между парой смежных ребер 106 показан на фиг.7) между смежными ребрами 106 в Х направлении составляет ориентировочно от 4 мм до 6 мм. Ребра 106 могут иметь высоту над первой базовой секцией 108, составляющую ориентировочно от 1 мм до 10 мм. Преимущественно ребра 106 главным образом расположены заподлицо с или выступают над участком 84D опорной подушки 84, окружающим первый основной корпус 100. Например, ребра 106 могут выступать на величину ориентировочно от 0 мм до 6 мм над участком 84D. За счет их формы и размера ребра 106 приспособлены для вхождения в зацепление со спиной и/или бедром оператора, когда оператор прижимается к спинке 80. Когда оператор прижимается к спинке 80 во время движения тележки, в том числе и на поворотах, ребра 106 содействуют удержанию оператора в отсеке 60 оператора. Это особенно справедливо для случая, когда оператор нажимает на рукоятку 70 управления, так как при этом он вдавливает свой таз/бедра в опорную подушку 84.
Второй основной корпус 110 имеет соответственно внутреннюю и внешнюю поверхности 112 и 114, см. фиг.6 и 7. Внутренняя поверхность 112 обращена к центральной пластине 62А, в то время как внешняя поверхность 114 видна оператору. Второй основной корпус 110 дополнительно содержит множество вторых элементов 116, которые представляют собой ребра в показанном варианте, которые являются гибкими относительно второй базовой секции 118 второго основного корпуса 110. Ребра 116 могут иметь длину LR2 (длина LR2 только одного ребра 116 показана на фиг.6) в Y направлении, которая составляет ориентировочно от 60 мм до 170 мм. Ребра 116 также могут иметь ширину WR2 (ширина WR2 только одного ребра 116 показана на фиг.7А) в Х направлении, которая составляет ориентировочно от 4 мм до 6 мм. Зазор GR2 (только один зазор GR2 между парой смежных ребер 116 показан на фиг.7) между смежными ребрами 116 в Х направлении составляет ориентировочно от 4 мм до 6 мм. Ребра 116 могут иметь высоту HR2 (высота HR2 только одного ребра 116 показана на фиг.7А) над второй базовой секцией 118 в Z направлении, составляющую ориентировочно от 1 мм до 10 мм. Преимущественно ребра 116 главным образом расположены заподлицо с или выступают над участком 84Е опорной подушки 84, окружающим второй основной корпус 110. Например, ребра 116 могут выступать на величину ориентировочно от 0 мм до 6 мм над участком 84Е. За счет их формы и размера ребра 116 приспособлены для вхождения в зацепление со спиной и/или бедром оператора, когда оператор прижимается к спинке 80. Когда оператор прижимается к спинке 80 во время движения тележки, в том числе и на поворотах, ребра 106 содействуют удержанию оператора в отсеке 60 оператора. Это особенно справедливо для случая, когда оператор нажимает на рукоятку 70 управления, так как при этом он вдавливает свой таз/бедра в опорную подушку 84.
Первичная опорная подушка 84, которая содержит первый и второй основные корпуса 100 и 110, может быть изготовлена из полимерного материала, такого как полиуретан, при помощи операции реактивного литьевого прессования. Опорная подушка 84, которая содержит первый и второй основные корпуса 100 и 110, также может быть изготовлена из синтетического каучука при помощи операции компрессионного формования. Опорная подушка 84 преимущественно изготовлена из материала, который является долговечным и комфортным (удобным) для оператора.
Первый и второй элементы 106, 116 вместо того, чтобы быть изготовленными в виде ребер, имеющих в целом овальное поперечное сечение, могут иметь другие геометрические формы, например, ребра могут иметь в целом круговую, в целом прямоугольную, в целом квадратную, в целом эллиптическую, в целом треугольную или другую аналогичную форму поперечного сечения.
В варианте, показанном на фиг.9, траверса или полка 120 предусмотрена под (позади) подушкой 80 оператора. На фиг.9 траверса 120 показана в своем верхнем (выдвинутом) положении. Узкий паз 484 образован в опорной подушке 84, чтобы позволить перемещать в вертикальном направлении стойку (не показана) траверсы 120, когда траверсу 120 регулируют в вертикальном направлении. Когда траверса 120 находится в верхнем положении, оператор может упираться в траверсу 120 при движении тележки 10. Траверса 120 также может быть повернута в нижнее (убранное) положение, чтобы она не мешала перемещению оператора через сквозной отсек 60. Кнопка 120А выходит через отверстие 484А в опорной подушке 84. Оператор может нажимать на кнопку 120А для вертикальной регулировки и/или поворота траверсы 120. В варианте, показанном на фиг.10, траверса 120 не предусмотрена.
Обратимся теперь к рассмотрению фиг.3 и 4, где вторая стенка 64 отсека 60 оператора образована при помощи полимерного мата 130, имеющего соответственно первую и вторую подушки 140 и 150 для опоры колен, встроенные в него. Таким образом, подушки 140 и 150 для опоры колен объединены с полимерным матом 130 в показанном варианте. Альтернативно подушки 140 и 150 для опоры колен могут быть выполнена как отдельные элементы, соединенные с матом 130 при помощи клея, крепежных средств и т.п.
Мат 130 может иметь три запрессованные в него резьбовые вставки или гайки 130А (показанные на фиг.17; только одна из них показана на фиг.14). Болты 130В идут через стенку 50А батарейного отсека и входят в зацепление с гайками 130А, чтобы крепить мат 130 к стенке 50А батарейного отсека, см. также фиг.14А.
Мат 130 имеет переднюю сторону 132, которая видна оператору, и заднюю сторону 134, которая расположена рядом со стенкой 50А батарейного отсека, см. фиг.14, 15 и 17. Канал 134А образован на задней стороне 134 мата 130 для приема жгута проводов (не показан), связанного с рукояткой 70 управления. В канал 134А также введен U-образный армирующий элемент 50В, соединенный со стенкой 50А. На задней стороне 134 мата 130 также предусмотрены гнезда 134В для приема шарнирных элементов 50С, объединенных со стенкой 50А, см. фиг.14А и 17. Шарнирные элементы 50С позволяют поворачивать стенку 50А относительно базовой стенки 50D батарейного отсека 50. Наконец, на задней стороне 134 мата 130 предусмотрены первая и вторая выемки 240 и 250 для первой и второй опорных подушек 140 и 150 соответственно.
Первая подушка 140 (для) опоры колена содержит первый основной корпус 142, имеющий первую базовую секцию 144 и множество первых элементов 146, которые представляют собой ребра в показанном варианте, которые являются гибкими относительно первой базовой секции 144. Первая выемка 240 предусмотрена под (сзади) первым основным корпусом 142. Вторая подушка 150 опоры колена содержит второй основной корпус 152, имеющий вторую базовую секцию 154 и множество вторых элементов 156, которые представляют собой ребра в показанном варианте, которые являются гибкими относительно второй базовой секции 154. Вторая выемка 250 предусмотрена под (сзади) вторым основным корпусом 152.
Преимущественно ребра 146 и 156 не выходят за плоскость PM, в которой расположена внешняя поверхность 136 мата 130, в том числе участки 136А внешней поверхности, окружающие первую и вторую подушки 140 и 150 опоры колен, см. фиг.16.
Ребра 146 и 156 могут иметь ширину WMR ориентировочно от 3 мм до 4 мм и высоту HMR ориентировочно от 0.5 мм до 12 мм. Зазоры GMR между смежными ребрами 146 и 156 могут составлять ориентировочно от 5 мм до 6 мм. Специалисты легко поймут, что первые и вторые элементы могут иметь и другие формы и размеры.
Когда оператор правит тележкой 10 в направлении, показанном стрелкой А на фиг.1, оператор может упираться коленями в первый и второй основные корпуса 142 и 152. За счет конфигурации первой и второй базовых секций 144, 154 первого и второго основных корпусов 142, 152 основные корпуса 142, 152 действуют как пластинчатые пружины, чтобы поглощать и ослаблять силы, приложенные коленями оператора к первому и второму основным корпусам 142 и 152. Этот пружинный механизм, созданный за счет конфигурации или формы первой и второй базовых секций 144, 154, в сочетании с гибкими первыми и вторыми ребрами 146, 156, создает два отдельных механизма поглощения и ослабления сил, приложенных к первому и второму основным корпусам 142, 152 коленями оператора.
Обратимся теперь к рассмотрению фиг.18 и 19, на которых показана спинка 600, сконструированная в соответствии с еще одним вариантом настоящего изобретения. Спинка 600, показанная на фиг.18, установлена в отсеке 710 оператора вертикального уравновешенного вилочного автопогрузчика 700. Вилочный автопогрузчик 700 содержит основной корпус 712, первое и второе ведомые колеса, связанные с передним участком основного корпуса 712, причем только первое колесо 714 показано на фиг.18; и узел 716 рулевого колеса, связанного с задним участком основного корпуса 712. Предусмотрено, что указанная спинка 600 может быть установлена и на других тележках для погрузки-разгрузки материалов.
Отсек 710 оператора расположен в основном корпусе 712 и предназначен для приема оператора. Как это показано на фиг.18, основной корпус 712 содержит единственный вход 711 в отсек 710 оператора, который служит и выходом из него. Кроме спинки 600, отсек 710 оператора дополнительно содержит подлокотник 718. Скоростью и направлением движения (вперед или назад) тележки 700 может управлять оператор, находящийся в отсеке 710 оператора, при помощи многофункционального контроллера MFC. Управление осуществляется при помощи рукоятки 716А управления.
В варианте, показанном на фиг.19, спинка 600 содержит первичную конструкцию или первичную опорную подушку 601, имеющую основной участок 602, односторонний кронштейн 610, идущий наружу от основного участка 602, и устройство 630 захвата. Первичная конструкция 601 имеет контур, позволяющий принимать спину и/или бедра оператора, когда оператор стоит в отсеке 710 оператора и правит тележкой 700. Боковой кронштейн 610 расположен поблизости от входа 711 в отсек оператора, см. фиг.18. В показанном варианте боковой кронштейн 610 выступает наружу из основного участка 602 под углом ориентировочно больше чем 45 градусов, см. фиг.18, 19А и 19В. Устройство 630 захвата содержит отдельную вставку, связанную с боковым кронштейном 610 и служащую для удержания оператора во время движения тележки 700. Однако устройство захвата 630 может быть выполнено в виде единого целого с первичной конструкцией 601.
В показанном варианте устройство 630 захвата содержит основной корпус 632, имеющий множество первых элементов 634, которые представляют собой ребра в показанном варианте, которые являются гибкими относительно первой базовой секции 636 основного корпуса 632, см. фиг.19А и 19В. Ребра 634 могут иметь длину в Y направлении, см. фиг.19, ориентировочно от 50 мм и 150 мм. Ребра 634 также могут иметь ширину WBR (ширина WBR только одного ребра 634 показана на фиг.19А) ориентировочно от 4 мм до 6 мм. Зазор GBR (только единственный зазор GBR между парой смежных ребер показан на фиг.19В) между смежными ребрами 634 может составлять ориентировочно от 4 мм до 6 мм. Ребра 634 могут иметь высоту от первой базовой секции 636, составляющую ориентировочно от 1 мм до 10 мм. Преимущественно ребра 634 главным образом расположены заподлицо с или выступают над участком 610А бокового кронштейна, окружающим первый основной корпус. Например, ребра 634 выступают над участком 610А на величину ориентировочно от 0 мм до 6 мм. За счет их формы и размера ребра 634 приспособлены для вхождения в зацепление со спиной и/или бедром оператора, когда оператор прижимается к спинке 600. Когда оператор прижимается к спинке 600 во время движения тележки, в том числе и на поворотах, ребра 634 содействуют удержанию оператора в отсеке 710 оператора.
Первичная конструкция 601 содержит внешнюю оболочку 601А и внутреннюю секцию 601В из вспененного материала, см. фиг.20А-20С. Внешняя оболочка 601А может быть изготовлена из полимерного материала, такого как формованный винил, а внутренняя секция 601В из вспененного материала может быть изготовлена из такого полимерного материала, как пенополиуретан. Основной корпус 632 устройства захвата может быть изготовлен из такого полимерного материала, как синтетический каучук.
В первом варианте, показанном на фиг.20А, стальная вставка 800 запрессована в первичную конструкцию 601. Резьбовые вставки или гайки 802 также запрессованы в первичную конструкцию 601. Резьбовые болты 633 запрессованы в основной корпус 632 устройства захвата. Основной корпус 632 может быть соединен с первичной конструкцией 601 за счет пропускания болтов 633 через соответствующие отверстия в стальной вставке 800 и затем за счет навинчивания гаек 802 на болты 633. Операцию соединения основного корпуса 632 со стальной вставкой 800 осуществляют ранее операции ценообразования, предназначенной для образования внутренней секции 601В из вспененного материала. Кроме того, слой внешний оболочки 601А вводят между основным корпусом 632 и стальной вставкой 800, ранее соединения основного корпуса 632 со стальной вставкой 800.
Во втором варианте, показанном на фиг.20В, стальная пластина 810 установлена позади (под) первичной конструкции 601. Основной корпус 1632 устройства захвата формуют с двумя или больше лапками 1632А, которые проходят через отверстия в первичной конструкции 601 и с фиксацией входят в отверстия в стальной пластине 810.
В третьем варианте, показанном на фиг.20С, стальная пластина 812 также установлена позади (под) первичной конструкции 601. Резьбовые вставки или гайки 2632А запрессованы в основной корпус 2632 устройства захвата. Болты 2632В проходят через отверстия в стальной пластине 812 и по резьбе входят в гайки 2632А, для соединения основного корпуса 2632 с первичной конструкцией 601.
Первичная конструкция 601, имеющая соединенный с ней основной корпус устройства захвата, может быть соединена со стенкой 712А основного корпуса 712 тележки при помощи клея, болтов или других аналогичных средств крепления.
В соответствии с еще одним вариантом настоящего изобретения, спинка 1600, предназначенная для использования в тележке 700, показанной на фиг.18, может иметь устройство 1630 захвата, которое содержит единственную подушку 1630А, имеющую длинную и узкую конфигурацию, см. фиг.21. Единственная подушка 1630А прикреплена к первичной конструкции или к первичной опорной подушке 1601 спинки 1600 при помощи адгезива 1603, такого как замазка (cement glue), или при помощи технической двухсторонней липкой ленты. Преимущественно единственная подушка 1630А идет над участком 1610А бокового кронштейна 1610 спинки 1600, окружающего подушку 1630А, на расстояние ориентировочно от 3 мм до 6 мм. Единственная подушка 1630А может быть изготовлена из полимерного материала, такого как синтетический каучук. Первичная конструкция 1601 может иметь внешнюю оболочку 1601А и внутреннюю секцию 1601В из вспененного материала, которые могут быть изготовлены из таких же материалов, из которых изготовлены внешняя оболочка 601А и внутренняя секция 601В в вариантах, показанных на фиг.20А-20С и описанных здесь ранее.
В соответствии с еще одним вариантом настоящего изобретения, вместо использования длинной и узкой единственной подушки 1630А, показанной на фиг.21, может быть использована подушка 1630А', изготовленная главным образом из такого же материала, что и подушка 1630А, но имеющая в целом такую же внешнюю периферийную форму, как устройство 630 захвата, показанное на фиг.19, см. фиг.22, 22А и 22В.
В соответствии с другим вариантом настоящего изобретения спинка 2600 для использования в тележке 700, показанной на фиг.18, может иметь устройство 2630 захвата, которое содержит первое, второе и третье ребра 2632, которые выполнены в виде единого целого с первичной конструкцией или с первичной опорной подушкой 2601 спинки 2600, см. фиг.23. Ребра 2632 имеют длинную и узкую конфигурацию. Преимущественно ребра 2632 выступают над участком 2610А бокового кронштейна 2610 спинки 2600, окружающего ребра 2632, на величину ориентировочно от 3 мм до 6 мм. Первичная конструкция 2601, содержащая ребра 2632, может иметь внешнюю оболочку 2601А и внутреннюю секцию из вспененного материала (не показана), которые могут быть изготовлены из таких же материалов, из которых изготовлены внешняя оболочка 601А и внутренняя секция 601В в вариантах, показанных на фиг.20А-20С и описанных здесь ранее. За счет их формы и размера ребра 2632 приспособлены для вхождения в зацепление со спиной и/или бедром оператора, когда оператор прижимается к спинке 2600. Когда оператор прижимается к спинке 2600 во время движения тележки, в том числе и на поворотах, ребра 2632 содействуют удержанию оператора в отсеке 710 оператора.
В соответствии с еще одним вариантом настоящего изобретения, показанным на фиг.24, устройство 3630 захвата содержит множество в целом круговых захватывающих подушек 3632. Захватывающие подушки 3632 выполнены в виде единого целого с первичной конструкцией или с первичной опорной подушкой 3601 спинки 3600. Преимущественно подушки 3632 выступают над участком 3610А бокового кронштейна 3610 спинки 3600, окружающего подушки 3632, на расстояние ориентировочно от 3 мм до 6 мм. Первичная конструкция 3601, содержащая подушки 3632, может иметь внешнюю оболочку 3601А и внутреннюю секцию из вспененного материала (не показана), которые могут быть изготовлены из таких же материалов, из которых изготовлены внешняя оболочка 601А и внутренняя секция 601В в вариантах, показанных на фиг.20А-20С и описанных здесь ранее. За счет их формы и размера ребра 3632 приспособлены для вхождения в зацепление со спиной и/или бедром оператора, когда оператор прижимается к спинке 3600.
В соответствии с еще одним вариантом настоящего изобретения, показанным на фиг.25, устройство 4630 захвата содержит единственное L-образное ребро 4632. L-образное ребро 4632 образовано в виде единого целого с первичной конструкцией или с первичной опорной подушкой 4601 спинки 4600, показанной на фиг.25. Преимущественно ребро 4632 идет над участком 4610А бокового кронштейна 4610 спинки 4600, окружающего ребро 4630А, на расстояние ориентировочно от 3 мм до 6 мм. Первичная конструкция 4601, содержащая ребро 4632, может иметь внешнюю оболочку 4601А и внутреннюю секцию из вспененного материала (не показана), которые могут быть изготовлены из таких же материалов, из которых изготовлены внешняя оболочка 601А и внутренняя секция 601В в вариантах, показанных на фиг.20А-20С и описанных здесь ранее. За счет его формы и размера ребро 4632 приспособлено для вхождения в зацепление со спиной и/или бедром оператора, когда оператор прижимается к спинке 4600.
Отсек 710 оператора вертикального уравновешенного вилочного автопогрузчика 700, показанного на фиг.18, дополнительно показан на фиг.26. Как это показано на фиг.26 и 26А, в отсеке 710 оператора предусмотрена выемка 5000 для колена, в которую входит колено оператора, когда оператор стоит и/или сидит в отсеке 710 оператора. Выемка 5000 для колена ограничена первой, второй и третьей металлическими стенками 5000А-5000С основного корпуса 712 автопогрузчика (тележки), см. фиг.26А. Подушка 5100 для колена также предусмотрена в отсеке 710 оператора и приспособлена для того, чтобы закрывать четвертую металлическую стенку 5000D основного корпуса 712, также как и угловую секцию 5000Е основного корпуса 712, расположенную в месте соединения первой и четвертой стенок 5000А и 5000D. Участок 5102 основного корпуса подушки 5100 для колена предназначен для контакта с левым коленом оператора, когда оператор стоит и/или сидит в отсеке 710 оператора. Угловой участок 5104 подушки 5100 для колена расположен так, чтобы закрывать угловую секцию 5000Е основного корпуса.
Угловой участок 5104 содержит основной корпус 5106, имеющий множество первых элементов 5108, которые представляют собой ребра в показанном варианте, которые являются гибкими относительно базовой секции 5110 основного корпуса 5106, см. фиг.27А и 28. Ребра 5108 могут иметь ширину WK (ширина WK только одного ребра 5108 показана на фиг.28) ориентировочно от 3 мм до 6 мм. Зазор GK (только один зазор GK между парой смежных ребер 5108 показан на фиг.28) между смежными ребрами 5108 может составлять ориентировочно от 4 мм до 6 мм. Ребра 5108 могут идти вниз от горизонтальной плоскости PH, см. фиг.28, под углом ориентировочно от 10 градусов до 60 градусов, а преимущественно около 45 градусов. За счет их формы и размера ребра 5108 приспособлены для вхождения в зацепление с коленом оператора, если оператор случайно прижимается к угловой секции 5000Е основного корпуса 712, когда оператор вводит свое колено в выемку 5000 для колена.
Как это показано на фиг.27А и 28, базовая секция 5110 основного корпуса 5106 выполнена так, что образуется полость 5200 позади ребер 5108 и базовой секции 5110, когда сила не приложена к основному корпусу 5106. Основной корпус 5106 может деформироваться внутрь в направлении угловой секции 5000Е, когда к нему приложена сила. Следовательно, базовая секция 5110 основного корпуса 5106 подушки работает как пластинчатая пружина, чтобы поглощать и ослаблять силы, приложенные коленом оператора к основному корпусу 5106. Этот пружинный механизм, созданный за счет конфигурации или формы базовой секции 5110, в сочетании с гибкими ребрами 5108, создает два отдельных механизма поглощения и ослабления сил, приложенных к основному корпусу 5106 подушки коленом оператора.
В соответствии с еще одним вариантом настоящего изобретения вторая стенка 64 отсека 60 оператора может быть образована при помощи полимерного мата 730, имеющего первую и вторую подушки 740 и 750 опоры колен соответственно, встроенные в него, см. фиг.29-35. Иначе говоря, подушки 740 и 750 опоры колен выполнены в виде единого целого с полимерным матом 730 в этом варианте. Альтернативно подушки 740 и 750 опоры колен могут иметь отдельные элементы, соединенные с матом 730 при помощи клея, крепежных средств и т.п.
Мат 730 может иметь три запрессованные в него резьбовые вставки или гайки 130А (показанные на фиг.34). Болты 130В проходят через стенку 50А батарейного отсека, см. фиг.14А, и по резьбе входят в гайки 130А, так чтобы крепить мат 730 к стенке 50А батарейного отсека.
Мат 730 имеет переднюю сторону 732, которая видна оператору, и заднюю сторону 734, см. фиг.34, которая расположена рядом со стенкой 50А батарейного отсека. Канал 734А образован на задней стороне 734 мата 130 для приема жгута проводов (не показан), связанного с рукояткой 70 управления. Задняя сторона 734 мата 730 также содержит первую и вторую выемки 840 и 850, соответствующие первой и второй опорным подушкам 740 и 750.
Первая подушка 740 опоры колена содержит первый основной корпус 742, имеющий первую базовую секцию 744 и множество первых элементов или ребер 746. Множество выемок 743, смещенных друг от друга в Х направлении, которые идут по длине в Y направлении, предусмотрены между первыми ребрами 746, см. фиг.29-32. Ширина W746 каждого ребра 746 в Х направлении, при измерении от смежных кромок соседних выемок 743, может составлять ориентировочно от 10 мм до 15 мм, см. фиг.32. Глубина D743 каждой выемки 743 может составлять ориентировочно от 1 мм до 3 мм, см. фиг.30 и 32. Ширина W743 каждой выемки 743 может составлять ориентировочно от 3 мм до 5 мм, см. фиг.31. Так как ширина W746 каждого ребра 746 существенно шире глубины D743 каждой выемки 743, ребра 746 являются главным образом не гибкими в Х направлении, но могут изгибаться внутрь вместе с остальным участком основного корпуса 742, когда основной корпус 742 воспринимает значительное усилие от колена оператора, что побуждает основной корпус 742 изгибаться внутрь в направлении стенки 50А батарейного отсека. Первая выемка 840 предусмотрена позади первого основного корпуса 742.
Вторая подушка 750 опоры колена содержит второй основной корпус 752, имеющий вторую базовую секцию 754 и множество вторых элементов или ребер 756. Множество выемок 753, смещенных друг от друга в Х направлении, которые идут по длине в Y направлении, предусмотрены между вторыми ребрами 756, см. фиг.29, 31-33. Ширина W756 каждого ребра 756 в Х направлении, при измерении от смежных кромок соседних выемок 753, может составлять ориентировочно от 10 мм до 15 мм, см. фиг.33. Глубина D753 каждой выемки 753 может составлять ориентировочно от 1 мм до 3 мм, см. фиг.33. Ширина W753 каждой выемки 753 может составлять ориентировочно от 3 мм до 5 мм, см. фиг.31. Так как ширина W756 каждого ребра 756 существенно шире глубины D753 каждой выемки 753, ребра 756 являются главным образом негибкими в Х направлении, но могут изгибаться внутрь вместе с остальным участком основного корпуса 752, когда основной корпус 752 воспринимает значительное усилие от колена оператора, что побуждает основной корпус 752 изгибаться внутрь в направлении стенки 50А батарейного отсека. Вторая выемка 840 предусмотрена позади первого основного корпуса 752.
Следует иметь в виду, что выемки 743, 753 снижают вероятность того, что колена оператора соскользнут с опорных подушек 740, 750.
Специалисты легко поймут, что первая и вторая выемки 743, 753, также как и первый и второй элементы 746, 756, могут иметь другие конфигурации и размеры.
Когда оператор ведет тележку, в которой предусмотрен мат 730, оператор может упираться своими коленями в первый и второй основные корпуса 742 и 752. За счет конфигурации первой и второй базовых секций 744, 754 первого и второго основных корпусов 742, 752, то есть за счет выемок 840, 850, предусмотренных в базовых секциях 744, 754, основные корпуса 742, 752 могут работать как пластинчатые пружины, чтобы поглощать и ослаблять силы, приложенные коленями оператора к первому и второму основным корпусам 742 и 752. Этот пружинный механизм, созданный за счет конфигурации или формы первой и второй базовых секций 744, 754, создает механизм поглощения и ослабления сил, приложенных к первому и второму основным корпусам 742, 752 коленями оператора.
Несмотря на то что были описаны предпочтительные варианты осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят за рамки формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ РЫЧАГА УПРАВЛЕНИЯ | 2007 |
|
RU2450965C2 |
| ТЕЛЕЖКА ДЛЯ ПОГРУЗКИ-РАЗГРУЗКИ МАТЕРИАЛОВ (ВАРИАНТЫ) | 2007 |
|
RU2555459C2 |
| ТЕЛЕЖКА ДЛЯ ПОГРУЗКИ-РАЗГРУЗКИ МАТЕРИАЛОВ | 2007 |
|
RU2445253C2 |
| ЗАЩИТНАЯ КРЫША (ВАРИАНТЫ) И СОДЕРЖАЩАЯ ЕЕ ТЕЛЕЖКА ДЛЯ ПОГРУЗКИ-РАЗГРУЗКИ МАТЕРИАЛОВ | 2007 |
|
RU2449941C2 |
| ДВУХЭТАЖНОЕ ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2719498C1 |
| КРЕСЛО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2669878C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ПОГРУЗКИ И РАЗГРУЗКИ МАТЕРИАЛА И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ (ВАРИАНТЫ) | 2003 |
|
RU2365711C2 |
| КРЕСЛО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2644038C2 |
| ПОСАДОЧНЫЙ УЗЕЛ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И БЕСКАРКАСНЫЙ ПОСАДОЧНЫЙ УЗЕЛ | 2014 |
|
RU2650305C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ ПАЦИЕНТА И ДЛЯ ПРЕДОСТАВЛЕНИЯ ЕМУ ТЕРАПЕВТИЧЕСКОГО ЛЕЧЕНИЯ | 1995 |
|
RU2137454C1 |
В изобретении предлагается спинка (80) опоры оператора в комбинации с тележкой (10) для погрузки-разгрузки материалов. Спинка может иметь опорную подушку (84) и устройство захвата (90), расположенное, по меньшей мере, на одном боковом участке (84А) опорной подушки. Устройство захвата может быть расположено главным образом заподлицо с или может выступать над поверхностью участка первичной опорной подушки, окружающего устройство захвата, для вхождения в зацепление с оператором, находящимся на указанной тележке для погрузки-разгрузки материалов. Устройство захвата (90) содержит основной корпус (100), имеющий первую базовую секцию и множество первых элементов, которые являются гибкими относительно первой базовой секции. Тележка для погрузки-разгрузки материалов содержит упомянутое устройство захвата и в одном из вариантов выполнения дополнительно содержит подушку опоры колена. В первом варианте выполнения тележка для погрузки-разгрузки материалов содержит сквозной отсек (60) оператора, в другом варианте выполнения указанная тележка содержит отсек оператора с единственным входом в него. Изобретения обеспечивают фиксацию оператора внутри отсека. 3 н. и 16 з.п. ф-лы, 51 ил.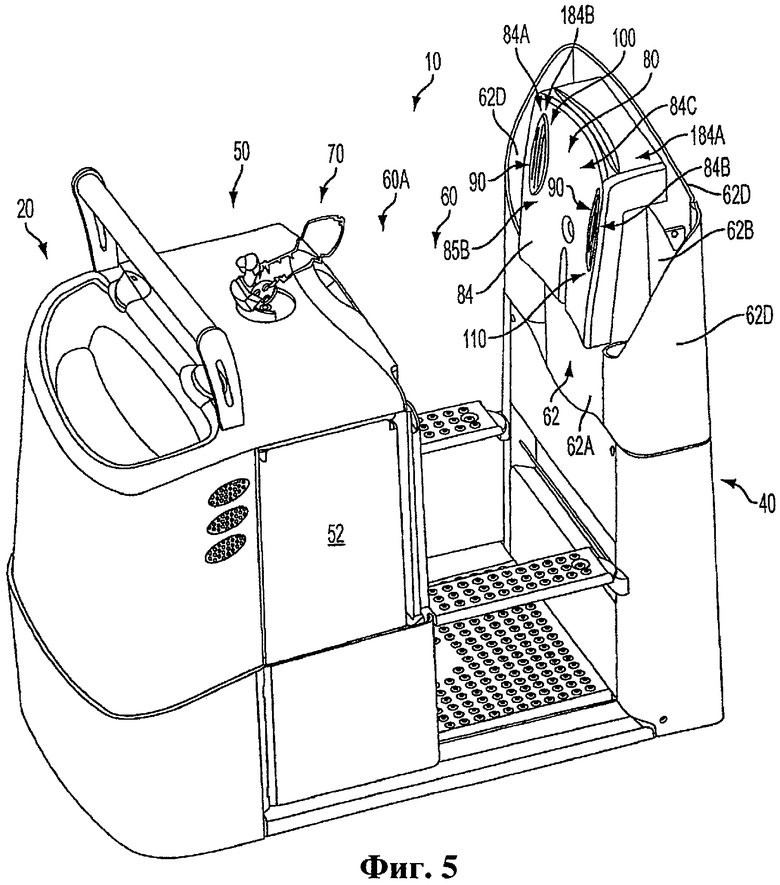
1. Спинка опоры оператора тележки для погрузки-разгрузки материалов, содержащая опорную подушку (84, 384, 601, 1601, 2601, 3601, 4601) и устройство захвата (90, 630, 1630, 2630, 3630, 4630), расположенное, по меньшей мере, на одном боковом участке опорной подушки, которое расположено заподлицо с или может выступать над поверхностью участка опорной подушки, окружающего устройство захвата, для вхождения в зацепление с оператором, находящимся на тележке для погрузки-разгрузки материалов, при этом устройство захвата (90, 630) содержит первый основной корпус (100, 632), имеющий первую базовую секцию (108, 636) и множество первых элементов (106, 634), которые являются гибкими относительно первой базовой секции, причем первый основной корпус расположен на первом боковом участке (84А, 610) первичной опорной подушки (84, 384, 601).
2. Спинка опоры оператора по п.1, в которой устройство захвата (90, 630, 1630, 2630, 3630, 4630) образовано в виде единого целого с первичной опорной подушкой (84, 384, 601, 1601, 2601, 3601, 4601).
3. Спинка опоры оператора по п.1, в которой устройство захвата (90, 630, 1630, 2630, 3630, 4630) выполнено отдельно от первичной опорной подушки (84, 384, 601, 1601, 2601, 3601, 4601).
4. Спинка опоры оператора по п.1, в которой устройство захвата (90, 630, 1630, 2630, 3630, 4630) содержит по меньшей мере один геометрический элемент, имеющий в целом круговую, в целом прямоугольную, в целом эллиптическую или в целом L-образную форму.
5. Спинка опоры оператора по п.1, в которой опорная подушка (601) дополнительно содержит центральный участок (602), а первый боковой участок (610) идет относительно плоскости, в целом касательной к указанному центральному участку, под углом, ориентировочно больше чем 45°.
6. Спинка опоры оператора по п.1, в которой первый боковой участок является криволинейным.
7. Спинка опоры оператора по п.1, в которой устройство захвата (90) дополнительно содержит второй основной корпус (110), имеющий вторую базовую секцию (118) и множество вторых элементов (116), которые являются гибкими относительно второй базовой секции, причем второй основной корпус расположен на втором боковом участке (84В) первичной опорной подушки.
8. Спинка опоры оператора по п.7, в которой первичная опорная подушка (84, 384) дополнительно содержит центральный участок (84С), а каждый из первого и второго боковых участков (84А, 84В) идет относительно плоскости (Р), в целом касательной к центральному участку, под углом, ориентировочно меньше чем 45°.
9. Спинка опоры оператора по п.7, в которой каждый из первого и второго боковых участков (84А, 84В) является криволинейным.
10. Тележка для погрузки-разгрузки материалов, которая содержит сквозной отсек (60) оператора, который имеет противоположные первую и вторую стенки (62, 64) и спинку (80), объединенную с первой стенкой, которая содержит опорную подушку (84, 384) и устройство (90) захвата, расположенное по меньшей мере на одном боковом участке (84А) опорной подушки, причем устройство захвата расположено заподлицо с или может выступать над поверхностью участка указанной первичной опорной подушки, окружающего устройство захвата, для вхождения в зацепление с оператором, находящимся на указанной тележке для погрузки-разгрузки материалов, а отсек (60) оператора дополнительно содержит подушку (140, 740) опоры колена, объединенную с второй стенкой (64), которая содержит первый основной корпус (142, 742), имеющий первую базовую секцию (144, 744) и множество первых элементов (146, 746), при этом устройство захвата (90) содержит первый основной корпус (100), расположенный на первом боковом участке (84А) опорной подушки (84, 384) и второй основной корпус (110), расположенный на втором боковом участке (84В) опорной подушки, причем первый основной корпус имеет первую базовую секцию (108) и множество первых элементов (106), которые являются гибкими относительно первой базовой секции, а второй основной корпус имеет вторую базовую секцию (118) и множество вторых элементов (116), которые являются гибкими относительно второй базовой секции.
11. Тележка для погрузки-разгрузки материалов по п.10, в которой устройство захвата (90) содержит по меньшей мере один геометрический элемент (106), имеющий в целом круговую, в целом прямоугольную, в целом эллиптическую или в целом L-образную форму.
12. Тележка (10) для погрузки-разгрузки материалов по п.10, в которой опорная подушка (84, 384) дополнительно содержит центральный участок (84С), а каждый из первого и второго боковых участков (84А, 84В) идет относительно плоскости, в целом касательной к центральному участку, под углом, ориентировочно меньше чем 45°.
13. Тележка для погрузки-разгрузки материалов по п.10, в которой первые элементы (146) являются гибкими относительно первой базовой секции (144).
14. Тележка для погрузки-разгрузки материалов по п.10, в которой первые элементы (746) являются не гибкими по меньшей мере в одном направлении и отделены друг от друга выемками (743).
15. Тележка для погрузки-разгрузки материалов по п.10, в которой отсек (60) оператора дополнительно содержит вторую подушку (150, 750) опоры колена, объединенную с второй стенкой (64), которая содержит второй основной корпус (152, 752), имеющий вторую базовую секцию (154, 754) и множество вторых элементов (156, 756).
16. Тележка для погрузки-разгрузки материалов, которая содержит отсек оператора (710) с единственным входом (711) в него, который также является и выходом из него, причем отсек содержит спинку (600, 1600, 2600, 3600, 4600), которая имеет опорную подушку (601, 1601, 2601, 3601, 4601) и устройство захвата (630, 1630, 2630, 3630, 4630), расположенное, по меньшей мере, на одном боковом участке (610, 1610, 2610, 3610, 4610) опорной подушки, причем устройство захвата расположено заподлицо с или выступает над поверхностью участка опорной подушки, окружающего устройство захвата, для вхождения в зацепление с оператором, находящимся на указанной тележке для погрузки-разгрузки материалов, причем устройство захвата содержит основной корпус (632), имеющий базовую секцию (636) и, по меньшей мере, один элемент (634), который является гибким относительно базовой секции, причем основной корпус расположен на первом боковом участке опорной подушки.
17. Тележка для погрузки-разгрузки материалов по п.16, в которой устройство захвата содержит, по меньшей мере, один геометрический элемент (634, 1630А, 1630А', 2632, 3632, 4632), имеющий в целом круговую, в целом прямоугольную, в целом эллиптическую или в целом L-образную форму.
18. Тележка для погрузки-разгрузки материалов по п.16, в которой опорная подушка дополнительно содержит центральный участок (602), а первый боковой участок (610) идет относительно плоскости, в целом касательной к центральному участку, под углом, ориентировочно больше чем 45°.
19. Тележка для погрузки-разгрузки материалов по п.16, в которой первый боковой участок расположен поблизости от входа в отсек оператора.
| Рабочее оборудование фронтального погрузчика | 1986 |
|
SU1388518A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE 3334746 A, 11.04.1983 | |||
| US 2005236197 A1, 27.10.2005 | |||
| US 6948739 B2, 27.09.2005 | |||
| Крыша для электропогрузчика | 1980 |
|
SU1167147A1 |

