Область техники
Изобретение относится к области сейсмических исследований и может быть использовано в нефтяной и газовой промышленности, а именно - при контроле процесса гидроразрыва пластов залежей углеводородов, в горнодобывающей промышленности - для контроля микросейсмичности в окрестности шахт и рудников, в технологиях контроля за соблюдением Договора о всеобъемлющем запрещении ядерных испытаний - для идентификации мест проведения подземных взрывов.
Предшествующий уровень техники
Перспективные технологии из числа применяемых в настоящее время для мониторинга микросейсмической активности в верхних слоях земной среды, в частности, мониторинга гидроразрыва пластов (ГРП) при добыче нефти и газа используют поверхностные группы сейсмических приемников (ПГСП) для регистрации сейсмических волн, излучаемых микросейсмическими источниками. Записи сейсмических сигналов, принятых ПГСП, используются затем для определения размеров и геометрии образовавшейся области разрушения среды. ПГСП представляют собой совокупность приборов, регистрирующих колебания частиц Земной среды, установленных на поверхности земли или на небольшом углублении под ее поверхностью на расстояниях от 30 до 200 м друг от друга в области (апертуре), размеры которой определяются глубиной, где происходят микросейсмические события, и скоростной моделью среды, охватывающей место производство ГРП. [RU, №2319177], [RU, №2305298], [PCT/US 2009/037220], [WO/2009/007822], [RU, №2451307], [RU, №2451308].
Известные способы микросейсмического мониторинга различаются, в основном, методами анализа зарегистрированных ПГСП сейсмических сигналов для решения основных задач мониторинга, каковыми являются:
1) измерение координат (локация) источников микроземлетрясений, образующихся при техногенном воздействии на земную среду, которые в совокупности определяют места локальных разрывов среды;
2) определение геометрических, кинематических и динамических характеристик этих разрывов, в частности, направления и скорости относительных перемещений локальных участков земной среды при микроземлетрясении, а также размеры этих участков.
В известных способах мониторинга решение двух указанных задач осуществляется с помощью различных процедур анализа данных ПГСП. Сначала с помощью процедуры локации измеряются координаты микросейсмического источника. Затем процедурами многоканальной фильтрации (с помощью «фокусировки на источник», «стекинга») сигналы от источника, зарегистрированные на различных областях апертуры ПГСП, выделяются из сейсмических шумов. Различия в формах сигналов, излучаемых источником в виде сейсмических волн в различных направлениях, позволяют судить о геометрии «диаграммы излучения» очага микросейсмического события, которая однозначно связана с характером деформации среды в очаге.
Практическая реализация известных способов мониторинга связана со следующими трудностями:
A. Наличием в записях сейсмических сигналов от микроземлетрясений сильных когерентных помех, т.е. случайных помех, коррелированных и по времени, и по пространству. Такие помехи порождаются, главным образом, техническими устройствами, работающими в районе, где производится мониторинг микросейсмичности. В частности, это механизмы, используемые для разработки месторождений нефти или газа и технологических операций гидроразрыва среды.
Б. Сложностью строения земной среды под ПГСП, включающей область, где происходят микросейсмические события. Недостаточный учет имеющейся информации о строении среды приводит к ошибкам в физических моделях распространения сейсмических волн от микросейсмических источников к приемникам ПГСП, т.е. тех моделей, которые используются при решении указанных выше основных задач обработки сейсмических сигналов при микросейсмическом мониторинге.
B. Сложностью механизмов очагов микросейсмических источников, которые невозможно моделировать как точечные источники только вида расширения (типа взрыва) или только вида сдвига (типа двойного диполя). Как правило, микросейсмические источники имеют тензор сейсмического момента общего вида [Foulger G.R., Julian B.R. et al Non-double-couple microearthquakes at Long Valley caldera, California, provide evidence for hydraulic fracturing // Journal of Volcanology and Geothermal Research, N 132, (2004), 45-71], причем в процессе развития трещины при гидроразрыве этот тензор может меняться во времени.
Измерение координат (локацию) микросейсмического источника по данным ПГСП приходится осуществлять при очень малых отношениях сигнал/шум из-за высоких техногенных поверхностных сейсмических помех, малой энергетики самих источников и затухания сейсмических волн на пути от источника к поверхности. Поэтому алгоритмы локации должны в максимальной степени использовать имеющуюся априорную информацию, как о статистических характеристиках помех, так и об условиях распространения сейсмических волн в среде под ПГСП, определяемых скоростной моделью этой среды. Эти обстоятельства, в частности, учитываются в способах измерения координат микросейсмических источников, описанных в патентах [RU, №2451307, G01V 1/00, опубл. 20.05.2012] и [RU, №2451308, G01V 1/00, опубл. 20.05.2012].
Известные из уровня техники способы решения второй основной задачи микросейсмического мониторинга - определения механизма очага источника, в частности, методы, изложенные в [WO/2009/007822, Methods and Systems for Processing microseismic data (Shlumberger)] и [Foulger G.R., Julian B.R. et al. Non-double-couple microearthquakes at Long Valley caldera, California, provide evidence for hydraulic fracturing // Journal of Volcanology and Geothermal Research, N 132, (2004), 45-71], основаны на инверсии записей сигналов от источника (сейсмограмм), зарегистрированных различными сейсмометрами ПГСП, т.е. преобразовании совокупности этих записей в тензор сейсмического момента источника. Эти известные технические решения подразумевают, что сигналы источника могут быть с достаточной точностью выделены из помех, т.е. что отношение сигнал/шум в отдельных приемниках ПГСП достаточно велико. Однако во многих практических приложениях, в частности, при гидроразрывах среды, последнее условие не выполняется, и механизм очага источника, как и его координаты, необходимо определять в условиях, когда сейсмограммы источника полностью замаскированы шумами. Т.е. обе указанные выше задачи микросейсмического мониторинга невозможно решать известными способами с требуемой надежностью и точностью при малом отношении сигнал-помеха в приемниках ПГСП.
Для надежного определения механизма очагов микросейсмических источников в условиях сильных помех, воздействующих на ПГСП, необходимо использовать физическую модель очагов этих источников в районе, где проводится микросейсмический мониторинг [Аки К., Ричардс П. Количественная сейсмология М.: Мир, 1983, 536 с]. В известных способах на основании модели очага рассчитываются синтетические (теоретические) сейсмограммы, порождаемые источником на приемниках ПГСП, сравнивая которые с наблюдаемыми сейсмограммами определяют параметры механизма очага. Для расчета синтетических сейсмограмм необходимо использовать определенные предположения о временной функции смещений среды в очаге (которая реально никогда не известна). Расхождение между предполагаемой и реальной временными функциями вносит ошибки в определение параметров механизма очага, что затрудняет использование известных способов при малых отношениях сигнал помеха в приемниках ПГСП.
Из уровня техники известно применение трехкомпонентных сейсмометров в микросейсмическом мониторинге [RU, №2319177], однако в этом известном способе не определена процедура вычисления углов выхода сейсмических лучей от источников в точки расположения сейсмометров ПГСП и не учитывается влияние поверхности раздела земной среды и воздуха на распределение энергии сейсмической волны по компонентам каждого из сейсмометров [Jepsen, D.C. and Kennet, B.L.N., 1990 Three-component analysis of regional seismograms // Bui. Seism. Soc. Am., vol.80, 1990,
P.2032-2053]. Поэтому в известном способе не может быть использована полная энергия сейсмических колебаний вдоль сейсмических лучей, соединяющих источник с приемниками ПГСП, что не позволяет достичь потенциальной надежности и точности микросейсмического мониторинга в условиях малого отношения сигнал-помеха в приемниках ПГСП.
Также из уровня техники известны способы измерения координат микросейсмических источников [RU, №2451307, G01V 1/00, опубл. 20.05.2012], [RU, №2451308, G01V 1/00, опубл. 20.05.2012] учитывающие статистические характеристики помех, воздействующих на приемники ПГСП. В этих способах для анализируемых данных ПГСП измеряются координаты точки максимума по координатам источника определенных функционалов, зависящих как от всей совокупности зарегистрированных данных, так и от координат источника. Функционал способа [RU, №2451308] является обобщением известного функционала сейсмической эмиссионной томографии (СЭТ) (при вычислении последнего в частотной области), но в отличие от СЭТ он учитывает статистические характеристики помех, воздействующих на зарегистрированные сигналы микросейсмического источника. Для этого в предлагаемом обобщении функционала СЭТ используется матричная функция спектральной плотности мощности помех, одновременно воздействующих на всю совокупность приемников ПГСП. При большом числе приемников, применяемых для мониторинга ГРП, указанная функция имеет очень большой размер и поэтому определяется (по дополнительным наблюдениям помех) с невысокой точностью, что уменьшает эффективность ее использования для микросейсмического мониторинга при малых отношениях сигнал-помеха в приемниках ПГСП.
В известном способе [RU, №2451308] максимизируемый по координатам источника функционал вычисляется только по фазам комплексных дискретных конечных преобразований Фурье (ДКПФ) данных, зарегистрированных сейсмометрами ПГСП в анализируемом временном окне. При этом для вычисления указанного фазового функционала используются данные только тех пар приемников ПГСП и только те частоты их ДКПФ, для которых в специальной предварительной процедуре обработки данных ПГСП установлено высокое значение их функции когерентности. Использование только фазовой информации, содержащейся в данных ПГСП, а также только пар датчиков и частот с высокой когерентностью обеспечивает дополнительную помехоустойчивость при оценивании координат микросейсмического источника в условиях при малых отношениях сигнал-помеха в приемниках ПГСП.
Недостаток способов [RU, №2451308], [RU, №2451308] (являющихся усовершенствованием традиционно применяемого в микросейсмическом мониторинге способа СЭТ) состоит в том, что они не позволяют измерять параметры механизмов очагов микросейсмических источников, а также не позволяют использовать полную энергию сейсмических волн, распространяющихся вдоль лучей от источника до приемников ПГСП (что возможно при оснащении ПГСП трехкомпонентными сейсмометрами).
Существенными недостатками способов измерения координат микросейсмических источников [RU, №2451307], [RU, №2451308] (как и способов, описанных в [RU, №2319177], [RU, 2305298], [PCT/US 2009/037220]) является то, что в них не принимается во внимание сложный характер механизмов очагов реальных микросейсмических источников, что особенно важно при мониторинге гидроразрыва пласта на нефте-газовых месторождениях. Наличие в очаге источника деформаций не только типа расширения (типа взрыва), но и типа сдвига (типа двойного диполя) приводит к существенному различию амплитуд (и следовательно, отношений сигнал/шум), а также знаков первых вступлений сигналов источника (сейсмограмм), зарегистрированных различными приемниками ПГСП, т.е. к нарушению «подобия» этих сейсмограмм для различных приемников. При нарушении подобия сигналов, порождаемых источником в различных датчиках, способы локации, основанные на СЭТ и ее обобщениях, теряют свою эффективность, т.е. обеспечиваемая ими надежность обнаружения источника и точность измерения его координат существенно ухудшаются. Можно утверждать, что эти способы ориентированы на локацию источников с механизмом очага только типа расширения.
Также способы [RU, №2451307], [RU, №2451308] не позволяют использовать полную энергию сейсмических волн, распространяющихся вдоль лучей от источника до приемников ПГСП, что возможно при оснащении ПГСП трехкомпонентными сейсмометрами.
Способ измерения координат микросейсмических источников, предлагаемый в настоящем изобретении, наиболее близок к способу, описанному в патенте [RU, №2451307, G01V 1/00, опубл. 20.05.2012]. В этом известном способе регистрация сейсмических волн, излучаемых микросейсмическим источником, производится поверхностной группой сейсмических приемников (ПГСП). Обработка зарегистрированных многоканальных сейсмических сигналов осуществляется цифровой аппаратурой. Механический процесс разрушения среды (в частности, процесс разрыва среды при ГРП) интерпретируется как последовательность микросейсмических событий, генерирующих сейсмические волны, поэтому анализ цифровых записей сейсмических сигналов осуществляется в скользящем временном окне с длительностью, равной типичной длительности микросейсмических событий (в режиме, близком к режиму реального времени). В результате цифровой обработки данных, соответствующих последовательности временных окон, записи поверхностного сейсмического волнового поля в области установки ПГСП отображаются в совокупность точечных источников внутри исследуемой области земной среды. При этом суждение об обнаружении микросейсмического события и измерение координат его источника осуществляется на основе вычисления максимума определенного функционала от данных ПГСП, зарегистрированных в текущем временном окне. Последующий анализ полученной совокупности точечных источников позволяет судить о процессе развития трещин в земной среде (вызванных, в частности технологической процедурой ГРП).
В настоящем изобретении предлагается модификация описанных в [RU, №2451307], [RU, №2451308] способов измерения координат микросейсмического источников путем введения дополнительных измерительных и вычислительных процедур для определения ожидаемых амплитуд и знаков первых вступлений сигналов, порождаемых в приемниках ПГСП источником со сложным механизмом очага (полным тензором его сейсмического момента). Эти процедуры позволяют скомпенсировать потерю подобия указанных сигналов при появлении в очаге источника сдвиговых составляющих, уменьшить влияние помех и, следовательно, уменьшить вероятность ошибок измерения координат источника.
Введение указанных измерений и процедур в алгоритм обработки данных ПГСП позволяет не только улучшить качество локации источника, но одновременно дает возможность определять параметры механизма его очага (параметры тензора его сейсмического момента). Это дает возможность решать на основе единой процедуры анализа данных ПГСП обе основные задачи микросейсмического мониторинга в условиях сильных помех, полностью маскирующих сигналы от источника, зарегистрированные приемниками ПГСП.
Для улучшения качества измерения координат и параметров механизма очага источника существенным является использование в ПГСП трехкомпонентных сейсмометров и точный учет распределения по компонентам сейсмометров энергии сейсмических волн от источников, расположенных в различных точках контролируемой среды. Для этого необходимы специальные процедуры для определения углов выхода сейсмических лучей от источников в точки расположения сейсмометров ПГСП и учета влияния поверхности раздела земной среды и воздуха на распределение энергии сейсмических волн по компонентам каждого из сейсмометров. Оба данных фактора существенно влияют на указанное распределение энергии, и только их учет обеспечивает эффективное использование при микросейсмическом мониторинге полной энергии сейсмических волн, распространяющихся вдоль лучей от источника к приемникам ПГСП.
Раскрытие изобретения
Решаемая в предлагаемом изобретении задача - улучшение технико-эксплуатационных характеристик мониторинга микросейсмических событий с помощью ПГСП, в том числе техногенных микроземлетрясений, порождаемых различными видами деятельности человека.
Технический результат, который может быть получен при осуществлении заявленных вариантов способа микросейсмического мониторинга, это - повышение вероятности обнаружения микросейсмических событий, улучшение точности измерения координат их источников, а также определение параметров механизма очага микросейсмического источника при малых отношениях сигнал-шум в приемниках ПГСП.
Для решения поставленной задачи с достижением указанного технического результата по первому варианту осуществления предлагаемого способа в известном способе измерения координат микросейсмических источников, включающем:
- регистрацию поверхностной группой сейсмических приемников сейсмических сигналов, излучаемых микросейсмическими источниками; обработку сейсмических сигналов цифровой аппаратурой в режиме, близком к режиму реального времени;
- анализ цифровых записей сейсмических сигналов в скользящем временном окне с длительностью, равной типичной длительности микросейсмических событий;
- суждение по результатам анализа об обнаружении микросейсмического события, путем вычисления определенного функционала;
- установление значения векторного аргумента, в котором этот функционал достигает максимума;
- определение по этому значению координат микросейсмического источника, согласно изобретению предлагается:
- использовать трехкомпонентные сейсмометры в качестве приемников ПГСП;
- измерять дополнительные характеристики сейсмических сигналов, регистрируемых ПГСП, а именно:
1) измерять значения полных векторов сейсмических колебаний в точках выхода на поверхность лучей их распространения от микросейсмического источника ко всем трехкомпонентным сейсмометрам ПГСП;
2) измерять соответствие основных физических характеристик указанных в п.1) сейсмических сигналов, зарегистрированных на различных сейсмометрах ПГСП с ожидаемыми (теоретическими) значениями этих характеристик, а именно:
а) относительных задержек во времени этих колебаний на разных сейсмометрах,
б) знаков (полярностей) этих колебаний на разных сейсмометрах,
в) отношений мгновенных амплитуд на разных сейсмометрах;
3) измерять спектральные плотности мощности помех, воздействующих на каждый из трехкомпонентных сейсмометров ПГСП;
- для расчета ожидаемых (теоретических) характеристик сейсмических колебаний, измеренных согласно п.1), использовать реальные физические модели среды под ПГСП, в которой происходят микросейсмические события:
- скоростную модель среды,
- модель затухания сейсмических волн в среде,
- динамическую модель типичных очагов микросейсмических источников.
- вычислять функционал, зависящий от результатов измерений, описанных в
п.п.1) - 3), а также от координат микросейсмических источников и параметров механизма их очагов в анализируемой области среды;
функционал вычисляется в частотной области и имеет вид:

где:

xk(fj), j=1, …, N - 3-х-мерные комплексный вектор значения на частоте fj ДКПФ отсчетов сейсмических сигналов, зарегистрированных на трех компонентах k-го сейсмометра ПГСП в анализируемом временном окне длительностью T,
N=Tfд - число 3m-мерных отсчетов сигналов ПГСП в этом временном окне,
fд - частота дискретизации сигналов ПГСП, 
r=(x, y, z) - координаты микросейсмического источника;


pk(r)=(px,py,pz) - единичный вектор выхода сейсмического луча Lk(r), соединяющего микросейсмический источник в точке r с точкой расположения k-го сейсмометра; С1,k(r), С2,k(r), qk(r), v(r) - функции, позволяющие учитывать не только угол выхода сейсмического луча Lk(r), но также влияние поверхности раздела среды и воздуха на волновое поле под k-м сейсмометром и измерять полную энергию сейсмической волны от микросейсмического источника, приходящей на k-й сейсмометр;
hk(fj|r,θ)=dk(r,θ)ехр{-i2πfjГk(r)} - комплексная частотная характеристика пути распространения сигнала микросейсмического источника вдоль сейсмического луча Lk(r), где i - мнимая единица, Гk(r) - время распространения сейсмической волны от микросейсмического источника вдоль луча Lk(r) (определяемое скоростной моделью среды под ПГСП),
dk(r, θ) - значение относительной амплитуды излучения колебаний в очаге вдоль луча Lk(r) (значение «диаграммы излучения» очага); эта величина определяется как взаимным расположением микросейсмического источника и k-го сейсмометра, так и вектором параметров θ механизма очага микросейсмического источника;
θ=(w, α, β, γ) - параметры механизма очага микросейсмического источника, имеющие следующий физический смысл: w - доля энергии микросейсмического источника, излученной в результате деформаций в очаге в виде расширения среды (1-w - соответственно, доля энергии микросейсмического источника, излученной в результате деформаций в очаге в виде сдвигов участков среды), α, β - направляющие углы плоскости сдвига участков среды, γ угол, определяющий направление деформации среды в плоскости сдвига;
m - число трехкомпонентных сейсмометров ПГСП;
J - множество индексов частот ДКПФ, соответствующее интервалу частот, в котором измеряют сигнал микросейсмического источника;
Q - область земной среды, в которой выявляют микросейсмические источники;
V - область значений параметров θ механизма очага, соответствующая излучению им сейсмических сигналов в направлении апертуры ПГСП;
- устанавливать значение векторных аргументов r, θ функционала Ф(r, θ) (1), в котором функционал достигает максимума, и по найденному значению r определять измеренное значение координат 

Для решения поставленной задачи с достижением указанного технического результата по второму варианту осуществления предлагаемого способа в известном способе измерения координат микросейсмических источников, включающем:
- регистрацию поверхностной группой сейсмических приемников сейсмических сигналов, излучаемых микросейсмическими источниками; обработку сейсмических сигналов цифровой аппаратурой в режиме, близком к режиму реального времени;
- анализ цифровых записей сейсмических сигналов в скользящем временном окне с длительностью, равной типичной длительности микросейсмических событий;
- суждение по результатам анализа об обнаружении микросейсмического события, путем вычисления определенного функционала;
- установление значения векторного аргумента, в котором этот функционал достигает максимума;
- определение по этому значению координат микросейсмического источника, согласно изобретению предлагается:
- использовать трехкомпонентные сейсмометры в качестве приемников ПГСП;
- измерять дополнительные характеристики сейсмических сигналов, регистрируемых ПГСП, а именно:
1) измерять полную энергию колебаний сейсмических волн, порождаемых микросейсмическим источником, в точках выхода на поверхность лучей их распространения от микросейсмического источника ко всем трехкомпонентным сейсмометрам ПГСП;
2) измерять соответствие основных физических характеристик указанных в п.1) колебаний на различных сейсмометрах ПГСП с ожидаемыми (теоретическими) значениями этих характеристик, а именно:
а) относительных задержек во времени этих колебаний на разных сейсмометрах,
б) знаков (полярностей) этих колебаний на разных сейсмометрах,
в) отношений мгновенных амплитуд на разных сейсмометрах;
3) измерять спектральные плотности мощности помех, воздействующих на каждый из трехкомпонентных сейсмометров ПГСП;
4) измерять функции взаимной когерентности для каждой пары сейсмических колебаний вдоль лучей, указанных в п.1);
- для расчета ожидаемых (теоретических) характеристик сейсмических колебаний, измеренных согласно п.1), использовать реальные физические модели среды под ПГСП, в которой происходят микросейсмические события:
- скоростную модель среды,
- модель затухания сейсмических волн в среде,
- динамическую модель типичных очагов микросейсмических источников.
- вычислять функционал, зависящий от результатов измерений, описанных в п.п.1) - 4), а также от координат микросейсмических источников и параметров механизмов их очагов в анализируемой области среды;
функционал вычисляется в частотной области и имеет вид:

где:

Δφk,l(r,θ,fj)=2πfj(Гk(r)-Гl(r))+π(γk(r,θ)-γl(r,θ)) - ожидаемая разность фаз на частоте fj сигналов микросейсмического источника в точках выхода на поверхность сейсмических лучей Lk(r) и Ll(r);
γk(r, θ) - индикатор знака деформации среды, создаваемой микросейсмическим источником вдоль луча Lk(r) («1» - сжатие, «0» - расширение);

yl,j(r) вдоль лучей Lk(r) и Ll(r);
q(ψ),ψ∈[-π, π] - настроечная нелинейная функция процедуры анализа;
остальные обозначения в формуле (2) аналогичны обозначениям в формуле (1), при этом первая сумма в функционале Ψ(r) вычисляется по всем парам сейсмометров ПГСП, имеющим различные номера, для которых функция взаимной когерентности на частоте fj превышает порог, заданный в пороговой функции 
Во втором варианте осуществления заявленного способа при минимизации функционала (2) по r,θ используются только аргументы (фазы) измеренных комплексных величин yk,j(r). Этот вариант математически получается раскрытием в функционале (1) квадрата модуля суммы 
Использование в предлагаемом способе измерения координат и параметров очагов микросейсмических источников второго варианта с функционалом (2) наиболее целесообразно, когда нет достоверной информации о статистических характеристиках помех, т.е. неизвестны матричные спектральные плотности мощности (МСПМ) Fk(f) помех, воздействующих на трехкомпонентные сейсмометры ПГСП. В большинстве практических ситуаций эти МСПМ могут быть определены только по дополнительным наблюдениям помех, произведенным до момента, когда произошло микросейсмическое событие (например, до начала процесса гидроразрыва пласта).
В настоящем изобретении предлагается реализация решения второй основной задачи микросейсмического мониторинга по данным ПГСП - определения механизма очага микросейсмического источника - когда отношения сигнал/шум в отдельных приемниках ПГСП мало, однако число этих приемников и апертура ПГСП достаточно велики. При этом и локация, и определение параметров механизма очага источника осуществляются не в виде различных последовательных процедур анализа данных ПГСП, а в результате одной процедуры измерения полной совокупности параметров микросейсмического источника на основе многоканальной записи данных ПГСП.
Кроме того, в заявленный способ введены дополнительные измерительные и вычислительные процедуры для определения ожидаемых амплитуд и знаков первых вступлений сигналов, порождаемых в приемниках ПГСП микросейсмическим источником со сложным механизмом очага (полным тензором его сейсмического момента). Эти процедуры позволяют скомпенсировать потерю подобия указанных сигналов при появлении в очаге микросейсмического источника сдвиговых составляющих, уменьшить влияние помех и, следовательно, уменьшить вероятность ошибок измерения координат микросейсмического источника.
Введение указанных измерительных и вычислительных процедур в алгоритм обработки данных ПГСП позволяет не только улучшить качество локации микросейсмического источника, но одновременно дает возможность определять параметры механизма его очага (параметры тензора его сейсмического момента). Это позволяет решать на основе единой процедуры анализа данных ПГСП обе основные задачи микросейсмического мониторинга в условиях сильных помех, полностью маскирующих сигналы от микросейсмического источника.
В настоящем изобретении предлагается при использовании ПГСП с трехкомпонентными сейсмометрами применять также специальные измерительные и вычислительные процедуры для учета распределения энергии сейсмических волн по компонентам сейсмометра. Предложенные в настоящем изобретении процедуры определения углов выхода сейсмических лучей от микросейсмических источников и учета влияния поверхности раздела земной среды и воздуха на распределение энергии сейсмической волны по компонентам сейсмометра обуславливают высокую эффективность использования трехкомпонентных сейсмометров для повышения качества микросейсмического мониторинга. Указанные процедуры позволяют использовать для определения координат и параметров механизма очага микросейсмического источника полную энергию сейсмических волн, распространяющихся вдоль лучей от микросейсмического источника до сейсмометров ПГСП, более точно измерять относительные амплитуды и знаки (полярности) этих волн на разных сейсмометрах. Это повышает надежность обнаружения микросейсмического источника, точность определения его координат и параметров механизма его очага в условиях сильных сейсмических помех.
Предлагаемый в настоящем изобретении способ измерения координат микросейсмических источников позволяет существенно уменьшить влияние указанного выше фактора - сложного характера очага реальных микросейсмических событий - на эффективность микросейсмического мониторинга с помощью ПГСП, т.е. повысить надежность обнаружения и точность локации микросейсмических источников и одновременно с локацией определять важнейшие физические параметры очагов микросейсмических источников в условиях сильных техногенных помех, когда сигналы от микросейсмических источников полностью маскируются помехами. При практическом применении предлагаемый способ позволит уменьшить число сейсмоприемников в ПГСП и/или устранить необходимость заглубления их в скважины. Использование изобретения, таким образом, приведет к значительному уменьшению стоимости мониторинга микросейсмичности, особенно в случае сейсмического мониторинга гидроразрывов пластов при добыче углеводородов с помощью ПГСП.
Заявленный способ измерения координат микросейсмических источников и параметров механизма их очагов основан на измерении дополнительных характеристик сейсмических сигналов, современных математических методах статистического анализа многоканальных временных рядов и привлечении всей имеющейся априорной информации о строении среды под ПГСП и динамических характеристиках возникающих в ней микросейсмических источников. В предложенном способе при обработке записей ПГСП предлагается производить трассирование лучей распространения сейсмических волн от всех точек анализируемой области до сейсмометров ПГСП с целью определения времени распространения сигнала микросейсмического источника вдоль лучей, углов выхода лучей на поверхность раздела среды и воздуха и характера преобразования этой поверхностью волнового поля микросейсмического источника. Кроме того, предлагается использовать информацию о диаграмме излучения микросейсмического источника с полным тензором сейсмического момента - как для локации микросейсмического источника, так и для определения парметров механизма его очага при малых отношениях сигнал-помеха на поверхности.
Предлагаемый способ микросейсмического мониторинга предполагает включение в реализующее его устройство обработки цифровой сейсмической информации, зарегистрированной с помощью ПГСП, специальных блоков для измерения и расчета характеристик сейсмических лучей в среде под ПГСП и характеристик микросейсмических очагов источников со сложными тензорами сейсмического момента.
Указанные преимущества изобретения, а так же его особенности поясняются с помощью вариантов его осуществления со ссылками на прилагаемые фигуры.
Краткий перечень чертежей
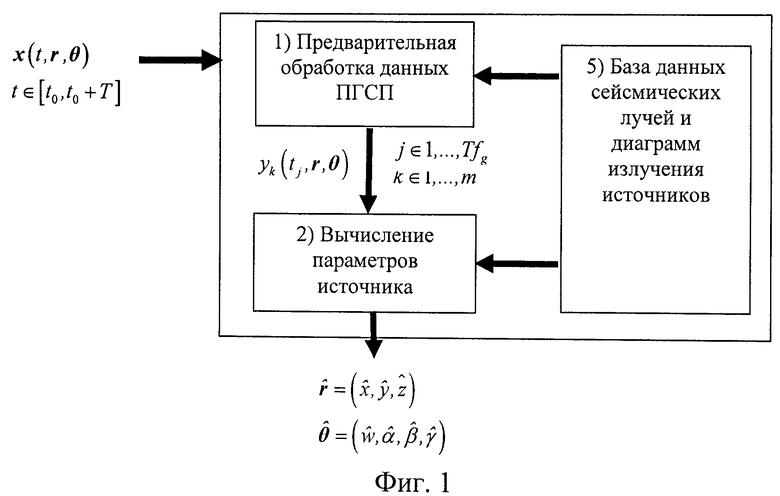
Фиг.1 изображает укрупненную блок-схему устройства мониторинга гидроразрыва среды для реализации заявленных вариантов способа;
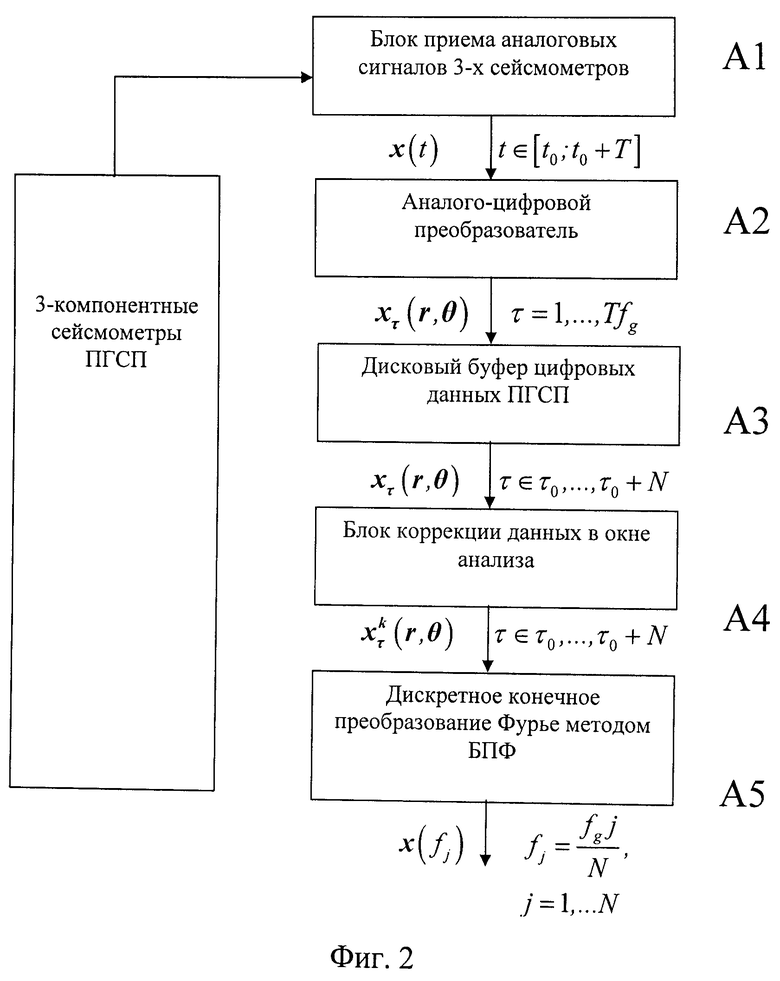
Фиг.2 - блок-схему предварительной обработки данных ПГСП;
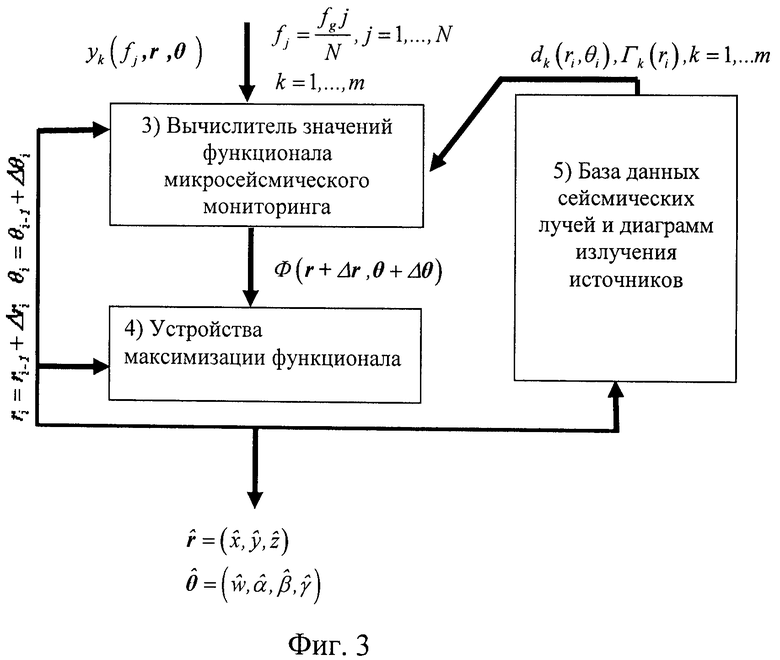
Фиг.3 - блок-схему вычисления параметров механизма очага микросейсмического источника;
Фиг.4 - блок-схему вычислителя значений функционала (1) микросейсмического мониторинга;
Фиг.5 - блок-схему вычислителя значений функционала (2) микросейсмического мониторинга;
Фиг.6 - эпюры локации микросейсмического источника с координатами x=0 м, y=0 м, z=1000 м и разными механизмами очага с помощью метода сейсмической эмиссионной томографии (СЭТ). Верхний ряд - карты функционала СЭТ, нижний ряд - диаграммы амплитуд и знаков сигналов от микросейсмического источника на поверхности, 

Фиг.7 - эпюры локации и определения параметров очага микросейсмического источника с механизмом очага типа сдвига по данным смеси синтетического сигнала источника с реальными помехами (истинные координаты источника: x=0 м, y=0 м, z=1000 м, истинные параметры его механизма очага: α=45°, β=90°, γ°=0 отношение сигнал/помеха 0.05). Верхний ряд - карты предложенного функционала (2) при различных ожидаемых значениях параметров механизма очага (α, β, γ), нижний ряд - диаграммы амплитуд и знаков сигналов от источника на поверхности,




Варианты осуществления изобретения
Устройство микросейсмического мониторинга (УММ), реализующее предложенные варианты способа микросейсмического мониторинга, служит для оценивания координат и параметров механизмов очагов микросейсмических источников и содержит блоки, выполненные на базе цифровой вычислительной техники. УММ содержит следующие последовательно работающие блоки (фиг.1): устройство 1 предварительной обработки (УПО) данных ПГСП (фиг.2), вычислитель 2 параметров источника (ВПИ) (фиг.3). ВПИ 2, в свою очередь, состоит из вычислителя 3 значений функционала (ВЗФ) (фиг.4, фиг.5) и устройства 4 максимизации функционала (УМФ). Для работы ВПИ 2 в масштабе времени, близком к реальному, необходимо его подключение к двум базам данных: а) базе данных сейсмических лучей (БДСЛ) в среде под ПГСП и б) базе данных диаграмм излучения микросейсмических источников (БДДИ) (на фиг.1, 3, 4, 5 это показано, как единая База 5 данных сейсмических лучей и диаграмм излучения источников). База 5 данных создается перед процедурой гидроразрыва (или другой процедурой микросейсмического мониторинга) на основании математических моделей среды под ПГСП и моделей механизмов очагов микросейсмических источников, возникающих в этой среде.
Устройство 1 предварительной обработки (фиг.1) состоит из следующих блоков (фиг.2):
- Блока А1 - блок приема 3-х канальных аналоговых сейсмических сигналов

- Блока А2 - аналогово-цифрового преобразователя для преобразования сигналов xk(t), t∈[0, T]; k=1, …, m, в последовательности дискретных отсчетов xk,τ, τ=1, …, N, k=1, …, m, с заданной частотой дискретизации fд. Эти отсчеты образуют в совокупности последовательность многоканальных цифровых данных ПГСП 
- Блока A3 - буфера накопления многоканальных дискретных цифровых данных 
- Блока А4 - блока коррекции многоканальных цифровых данных. Этот блок обеспечивает считывание из буфера многоканальных отсчетов 
- Блока А5 - преобразователя цифровых многоканальных данных ПГСП 

Информация, обработанная в УПО 1 (фиг.1), передается следующему блоку-вычислителю 2 параметров источника (ВПИ), состоящему из вычислителя 3 значений функционала (ВЗФ) и устройства 4 максимизации функционала (УМФ). ВЗФ 3 работает под управлением УМФ 4 и для каждого значения координат источника и параметров механизма его очага, «опрашиваемых» в процессе максимизации функционала, вычисляет соответствующее значение функционалов (1) или (2).
Для варианта устройства микросейсмического мониторинга, основанного на функционале (1), ВЗФ 3 состоит из следующих блоков (фиг.4):
- Блока Б1 - вычислителя величин yk,j(r, θ) - значений на частоте fj ДКПФ сейсмических колебаний в точках выхода на поверхность сейсмических лучей Lk(r), соединяющих микросейсмический источник в точке r с сейсмометрами ПГСП. Указанные колебания вычисляются с учетом кажущихся медленностей ph,k сейсмических волн вдоль лучей Lk(r), значений функций C1,k(r), C2,k(r), qk(r), ν(r), позволяющих учитывать влияние поверхности раздела среды и воздуха на распределение энергии сейсмической волны по компонентам k-го сейсмометра, и значений диаграммы излучения микросейсмического источника dk(r, θ). Значения последних параметров сейсмических лучей Lk(r) берутся из БДСЛ и БДДИ. При вычислении величин yk,j(r, θ) используются также МСПМ помех Fk(fj), если эти 3×3-матрицы предварительно оценены по дополнительным наблюдениям «чистых» помех ПГСП. В случае если информации об этих матрицах нет, вычисления производятся в предположении, что Fk(fj)=I, где I - единичная матрица.
- Блока Б2 - вычислителя амплитуд колебаний сигналов микросейсмического источника dk(r, θ) и времени распространения этих колебаний Гk(r) вдоль сейсмических лучей Lk(r), k=1, …, m, соединяющих «опрашиваемую» точку r возможного расположения микросейсмического источника с сейсмометрами ПГСП. Указанные характеристики лучей вычисляются для тех координат источника r=(x, y, z) и параметров θ=(w, α, β, γ) механизма его очага, которые задаются устройством максимизации функционала.
Вычисления в блоках Б1 и Б2 производятся с помощью информации, получаемой из базы данных сейсмических лучей в среде под ПГСП и базы данных диаграмм излучения очагов микросейсмических источников.
- Блока Б3 - вычислителя значения функционала (1) по на основе результатов вычислений в блоках Б1 и Б2.
Для варианта УММ, основанного на функционале (2), вычислитель ВЗФ 3 состоит из следующих блоков (фиг.5):
- Блоков В1 и В2, идентичных блокам Б1 и Б2 вычислителя ВЗФ 3 (фиг.4).
- Блока В3 - вычислителя амплитудно-фазовой информации в цифровых многоканальных данных ПГСП на основе комплексных частотных отсчетов yk,j(r), 
1) измеряются функции когерентности 
2) отбираются те пары величин yk,j(r,θ), yl,j(r,θ) и те частоты fj, для которых функция когерентности 
3) измеряются разности фаз 
- Блока В4 - вычислителя ожидаемых разностей фаз Δφk,l(ri, θi, fj) сейсмических сигналов для тех пар приемников ПГСП и тех частот fj, которые были отобраны в блоке В4
- Блока В5 - вычислителя функционала Ψ(r,θ) по формуле (2) на основе результатов работы блоков В1-В4.
Устройство 4 максимизации функционала (УМФ) может быть реализовано в двух следующих вариантах:
Для первого варианта УМФ 4 значения функционала вычисляются на сетке в многомерном пространстве измеряемых параметров (x, y, z, w, α, β, γ) микросейсмического источника: координат источника и параметров механизма его очага. Шаг этой сетки для различных параметров может быть различен: он определяется разрешающей способностью ПГСП и требуемой точностью мониторинга по каждому из измеряемых параметров источника. После вычисления всего множества значений функционала, соответствующего узлам сетки, на этом множестве находится глобальный максимум функционала. Если это величина этого максимума больше некоторого порога, то принимается решение: данные ПГСП в анализируемом временном окне свидетельствуют о присутствии сигнала от некоторого микросейсмического источника. При этом значения параметров (x, y, z, w, α, β, γ), соответствующих глобальному максимуму функционала, принимаются за оценки соответствующих параметров обнаруженного микросейсмического источника: его координат и параметров механизма его очага.
Первый вариант УМФ 4 позволяет находить аргументы глобального максимума функционалов (1) и (2) по координатам источника и параметрам механизма его очага (т.е. измерять эти характеристики микросейсмического источника) с ошибками, меньшими, чем шаг сетки для соответствующего параметра. Однако его применение требует значительной вычислительной мощности программно управляемого электронного устройства обработки информации ПГСП.
Во втором варианте выполнения УМФ 4 для нахождения глобального максимума функционалов (1) и (2) микросейсмического мониторинга по координатам источника и параметрам механизма его очага используется один из известных методов итеративной максимизации функции многих переменных. Все эти методы предполагают, что имеется предварительная оценка измеряемых параметров источника - «начальное приближение», в окрестности которого ищется локальный максимум функционала (1) или (2). Поиск локального максимума осуществляется с помощью одной из итеративных процедур математического программирования, основанных на квази-ньютоновских методах: методе сопряженных градиентов, методе Дэвидона-Флетчера-Пауэла и др. Начальное приближение чаще всего ищется сканированием функционала по сетке измеряемых параметров источника, как это делается в первом варианте выполнения УМФ 4. Однако шаги сетки в этом случае выбираются достаточно большими, что существенно экономит количество вычислений. Поэтому устройство УМФ 4 для второго варианта может быть реализовано на программно управляемом электронном устройстве обработки информации со скромными вычислительными возможностями.
Необходимость усовершенствования известных методов микросейсмического мониторинга с целью обеспечения их работоспособности в условиях, когда очаги микросейсмических источников имеют сложные динамические характеристики, а также эффективность предложенного способа для измерения параметров микросейсмических источников со сложными очагами при малых отношениях сигнал-помеха демонстрируются приведенными ниже результатами численного моделирования. Рассчитывались синтетические сейсмограммы 150 сейсмометров, расположение которых соответствовало геометрии реальной ПГСП для контроля гидроразрыва пласта на месторождении углеводородов. Микросейсмический источник, генерировавший синтетические сейсмограммы, был расположен на глубине 1000 м и имел горизонтальные координаты x=0 м, y=0 м в локальной системе координат реальной ПГСП. В качестве временной функции микросейсмического источника использовалась запись длительностью 100 милисекунд реального сейсмического события. Для маскировки синтетических сейсмограмм - сигналов микросейсмического источника - использовались реальные записи микросейсмических помех на сейсмометрах указанной ПГСП.
Механизм очага микросейсмического источника характеризовался деформацией среды в виде сдвига ее участков вдоль плоскости (источник типа двойного диполя) и равномерного ее расширения (источник типа взрыва). Этот механизм определяется рассмотренными выше параметрами θ=(w, α, β, γ) и позволяет вычислить теоретическое распределение относительных амплитуд создаваемых микросейсмическим источником колебаний земной поверхности (диаграмму амплитуд), распределение на дневной поверхности знаков первых вступлений сигналов от источника (диаграмму знаков движения поверхности: "+" - вверх, "-" - вниз) и распределение указанных знаков на поверхности малой сферы, окружающей источник (диаграмму знаков излучения источника). На приведенных ниже рисунках указанные диаграммы составляют второй ряд. Первый ряд представляют карты значений микросейсмического функционала, построенные при поиске источника на глубине 1000 м и горизонтальных координатах источника, расположенных в квадрате 
Первой задачей численного моделирования было выяснить: можно ли (даже при высоких отношениях сигнал/шум) точно измерять с помощью традиционного метода сейсмической эмиссионной томографии (СЭТ) координаты микросейсмического источника, механизм очага которого отличается от простейшего - с деформацией среды типа взрыва. Для этого были использованы синтетические сейсмограммы от источников с координатами r=(0 м, 0 м, 1000 м) и деформациями среды в очаге в виде суммы деформаций типа двойного диполя и типа взрыва. Сейсмограммы рассчитывались при различных значениях параметров механизма очага (w, α, β, γ), описанных в пояснениях к формуле (1).
На фиг.6 представлены результаты расчетов карт функционала СЭТ для 4 различных значений указанных параметров механизма очага. Неопределенность измерения координат микросейсмического источника с помощью СЭТ отчетливо проявляется для случая чисто сдвигового механизма очага (столбцы 1 и 4 на фиг.6). Добавление к чисто сдвиговой деформации среды ее деформации типа взрыва со значением параметра w=0.5 (столбцы 2 и 3 на фиг.6) в некоторой степени уменьшает неопределенность измерения координат микросейсмического источника. Однако ошибка измерения координат уменьшается до нуля только при некоторых «удачных» значениях углов α, β, γ сдвиговой составляющей деформации (столбец 3 на фиг.6).
Добавление шума в синтетические сейсмограммы сложного микросейсмического источника существенно искажает карты функционала СЭТ по сравнению с картами, приведенными на фиг.6, что приводит к резкому увеличению ошибок локации источника.
Из приведенных на фиг.6 результатов численного моделирования следует, что известные способы микросейсмического мониторинга, основанные на тех или иных модификациях метода эмиссионной сейсмической томографии, не могут обеспечить точной локации микросейсмического источника при сложном механизме его очага. Кроме того, они не решают задачи измерения параметров механизма очага источника.
Для проверки эффективности предложенных выше вариантов способа измерения параметров микросейсмических источников: его координат и параметров механизма его очага, использовалась смесь синтетических сейсмограмм с многоканальной записью реальных помех на ПГСП, установленной на месторождении углеводородов для контроля гидроразрыва пласта. Усредненное по сейсмометрам ПГСП среднеквадратическое отношение сигнал-помеха в модельной смеси составляло 0.05.
На фиг.7 представлены результаты обработки такой смеси в случае источника с координатами x=0 м, y=0 м, z=1000 м и сдвиговым механизмом очага с параметрами α=45°, β=90°, γ=0°. Карты функционала (2) рассчитывались при различных углах α, β, γ механизма очага (с шагом 10 градусов по каждому из углов) при сканировании по горизонтальным координатам источника в квадрате с центром (0 м, 0 м) и стороной 400 м, расположенного на глубине 1000 м. Примеры таких карт при углах α, β, γ, не совпадающих с истинными значениями параметров механизма очага, приведены в столбцах 1-3 фиг.7. Глобальный максимум функционала (2) для множества всех рассчитанных его значений соответствовал координатам источника 





С учетом того, что сканирование по углам сдвигового механизма очага источника производилось с шагом 10°, приведенные на фиг.7 результаты численного моделирования свидетельствуют о высокой эффективности предложенного способа измерения параметров микросейсмического источника со сложным механизмом очага при малом отношении сигнал/помеха в приемниках ПГСП.
Промышленная применимость
Наиболее успешно заявленные варианты способа измерения координат микросейсмических источников и параметров механизма их очагов промышленно применимы в нефтяной и газовой промышленности, а именно - при контроле процесса гидроразрыва пластов залежей углеводородов, в горнодобывающей промышленности - для контроля микросейсмичности в окрестности шахт и рудников, в технологиях контроля за соблюдением Договора о всеобъемлющем запрещении ядерных испытаний - для идентификации мест проведения сильных подземных взрывов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ | 2011 |
|
RU2451307C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ ПРИ ВОЗДЕЙСТВИИ ПОМЕХ | 2011 |
|
RU2451308C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБРАБОТКИ МИКРОСЕЙСМИЧЕСКИХ ДАННЫХ | 2008 |
|
RU2457513C2 |
| Способ определения местоположения очага микросейсмического события | 2016 |
|
RU2620785C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОЦЕССОВ ГИДРОРАЗРЫВА ПЛАСТА ПРИ РАЗРАБОТКЕ МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ПРОЦЕССОВ ТЕПЛОВОГО ВОЗДЕЙСТВИЯ ПРИ РАЗРАБОТКЕ ВЫСОКОВЯЗКИХ УГЛЕВОДОРОДОВ | 2020 |
|
RU2758263C1 |
| ОБНАРУЖЕНИЕ И ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЙ МИКРОСЕЙСМИЧЕСКИХ СОБЫТИЙ ПУТЕМ НЕПРЕРЫВНОЙ КАРТОГРАФИЧЕСКОЙ МИГРАЦИИ | 2005 |
|
RU2411544C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА РАЗРАБОТКИ НЕФТЯНЫХ И ГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2022 |
|
RU2799398C1 |
| СПОСОБ МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИСТОЧНИКОВ ЭМИССИИ И РАССЕЯННОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278401C1 |
| Способ сейсморазведки для определения положения низкоскоростных и высокоскоростных геологических тел вдоль глубинного разреза в районах, осложненных рельефом | 2024 |
|
RU2836261C1 |
Изобретение относится к области геофизики и может быть использовано при контроле процесса гидроразрыва пластов залежей углеводородов. По первому и второму вариантам способа измеряют поверхностной группой сейсмических приемников (ПГСП) сейсмические сигналы (СС), излучаемые микросейсмическими источниками (МИ). Производят анализ цифровых записей СС, судят по результатам анализа об обнаружении микросейсмического события путем вычисления определенных функционалов. Устанавливают значение векторного аргумента, в котором этот функционал достигает максимума, определяют по нему координаты МИ и параметры механизма очага МИ. В качестве приемников ПГСП применяют трехкомпонентные сейсмометры. Измеряют значения полных векторов СС в точках выхода на поверхность лучей распространения сейсмической волны от МИ ко всем сейсмометрам, рассчитывают ожидаемые значения физических характеристик СС, используя физические модели среды под приемниками ПГСП. При анализе цифровых записей СС вычисляют по первому и второму вариантам способа различные определенные функционалы. Технический результат: повышение вероятности обнаружения микросейсмических событий и точности измерения координат их источников. 2 н.п. ф-лы, 7 ил.
1. Способ измерения координат микросейсмических источников, заключающийся в том, что измеряют поверхностной группой сейсмических приемников сейсмические сигналы, излучаемые микросейсмическими источниками, для их регистрации, обрабатывают сейсмические сигналы цифровой аппаратурой в режиме, близком к режиму реального времени, производят анализ цифровых записей сейсмических сигналов в скользящем временном окне с длительностью, равной типичной длительности микросейсмических событий, судят по результатам анализа об обнаружении микросейсмического события путем вычисления функционала, устанавливают значение векторного аргумента, в котором этот функционал достигает максимума, определяют по значению векторного аргумента, в котором этот функционал достигает максимума, координаты микросейсмического источника и параметры механизма его очага, отличающийся тем, что в качестве приемников поверхностной группы сейсмических приемников применяют трехкомпонентные сейсмометры, измеряют значения полных векторов сейсмических колебаний в точках выхода на поверхность лучей распространения сейсмических волн от микросейсмического источника ко всем сейсмометрам, рассчитывают ожидаемые значения физических характеристик этих сейсмических колебаний, используя физические модели среды, в которой происходят микросейсмические события под сейсмометрами поверхностной группы сейсмических приемников - скоростную модель среды, модель затухания сейсмических волн в среде, динамическую модель типичных очагов микросейсмических источников, измеряют соответствие значений физических характеристик сейсмических сигналов, зарегистрированных на различных сейсмометрах, ожидаемым значениям этих характеристик, а именно таких физических характеристик, как относительные задержки во времени сейсмических сигналов на различных сейсмометрах, знаки-полярности сейсмических сигналов на различных сейсмометрах, отношения мгновенных амплитуд на различных сейсмометрах, спектральные плотности мощности помех, воздействующих на каждый из сейсмометров, при анализе цифровых записей сейсмических сигналов вычисляют функционал


xk(fj), j=1, …, N - 3-мерный комплексный вектор значения на частоте fj дискретного конечного преобразования Фурье отсчетов сейсмических колебаний, зарегистрированных на трех компонентах k-го сейсмометра поверхностной группы сейсмических приемников в анализируемом временном окне длительностью T,
N=Tfд - число 3m-мерных отсчетов сигналов поверхностной группы сейсмических приемников в этом временном окне,
fд - частота дискретизации сигналов поверхностной группы сейсмических приемников,

r=(x, y, z) - координаты микросейсмического источника,


pk(r)=(px, py, pz) - единичный вектор выхода сейсмического луча Lk(r), соединяющего микросейсмический источник в точке r с точкой расположения k-го сейсмометра,
C1,k(r), C2,k(r), qk(r), v(r) - функции, позволяющие учитывать не только угол выхода сейсмического луча Lk(r), но также влияние поверхности раздела среды и воздуха на волновое поле под k-м сейсмометром и измерять полную энергию сейсмической волны от микросейсмического источника, приходящей на k-й сейсмометр,
hk(fj\r, θ)=dk(r, θ)exp{-i2πfjГk(r)} - комплексная частотная характеристика пути распространения сигнала микросейсмического источника вдоль сейсмического луча Lk(r), где i - мнимая единица, Гk(r) - время распространения сейсмической волны от микросейсмического источника вдоль луча Lk(r), определяемое скоростной моделью среды под поверхностной группой сейсмических приемников,
dk(r, θ) - значение относительной амплитуды излучения сейсмических сигналов в очаге вдоль луча Lk(r) (значение «диаграммы излучения» очага), эта величина определяется как взаимным расположением микросейсмического источника и k-го сейсмометра, так и вектором параметров θ механизма очага микросейсмического источника,
θ=(w, α, β, γ) - параметры механизма очага микросейсмического источника, имеющие следующий физический смысл: w - доля энергии источника, излученной в результате деформаций в очаге в виде расширения среды, а (1-w) - соответственно доля энергии источника, излученной в результате деформаций в очаге в виде сдвигов участков среды), α, β - направляющие углы плоскости сдвига участков среды, γ - угол, определяющий направление деформации среды в плоскости сдвига,
m - число трехкомпонентных сейсмометров поверхностной группы сейсмических приемников,
j - множество индексов частот дискретного конечного преобразования Фурье, соответствующее интервалу частот, в котором измеряют сигнал микросейсмического источника,
Q - область земной среды, в которой выявляют микросейсмические источники,
V - область значений параметров θ механизма очага, соответствующая излучению им сейсмических сигналов в направлении апертуры поверхностной группы сейсмических приемников,
устанавливают значение аргументов r, θ функционала Ф(r, θ), в котором он достигает максимума, и по найденному значению r определяют измеренное значение координат 

2. Способ измерения координат микросейсмических источников, заключающийся в том, что измеряют поверхностной группой сейсмических приемников сейсмические сигналы, излучаемые микросейсмическими источниками, для их регистрации, обрабатывают сейсмические сигналы цифровой аппаратурой в режиме, близком к режиму реального времени, производят анализ цифровых записей сейсмических сигналов в скользящем временном окне с длительностью, равной типичной длительности микросейсмических событий, судят по результатам анализа об обнаружении микросейсмического события путем вычисления функционала, устанавливают значение векторного аргумента, в котором этот функционал достигает максимума, определяют по значению векторного аргумента, в котором этот функционал достигает максимума, координаты микросейсмического источника и параметры механизма его очага, отличающийся тем, что в качестве приемников поверхностной группы сейсмических приемников применяют трехкомпонентные сейсмометры, измеряют значения полных векторов сейсмических колебаний в точках выхода на поверхность лучей распространения сейсмических волн от микросейсмического источника ко всем сейсмометрам, рассчитывают ожидаемые значения физических характеристик этих сейсмических колебаний, используя физические модели среды, в которой происходят микросейсмические события под сейсмометрами поверхностной группы сейсмических приемников - скоростную модель среды, модель затухания сейсмических волн в среде, динамическую модель типичных очагов микросейсмических источников, измеряют соответствие значений физических характеристик сейсмических колебаний, зарегистрированных на различных сейсмометрах, ожидаемым значениям этих характеристик, а именно таких физических характеристик, как относительные задержки во времени сейсмических сигналов на различных сейсмометрах, знаки-полярности сейсмических сигналов на различных сейсмометрах, отношения мгновенных амплитуд на различных сейсмометрах, спектральные плотности мощности помех, воздействующих на каждый из сейсмометров, функции взаимной когерентности для каждой пары измеренных сейсмических колебаний в точках выхода лучей распространения сейсмических волн от микросейсмического источника к сейсмометрам, при анализе цифровых записей сейсмических сигналов вычисляют функционал

где 

fд - частота дискретизации сейсмических сигналов поверхностной группы сейсмических приемников, N=Tfд - число 3m-мерных отсчетов сейсмических сигналов поверхностной группы сейсмических приемников во временном окне анализа,
yk,j(r), yl,j(r) достаточно велика,

Δφk,l(r, θ, fj)=2πfj(Гk(r)-Г1(r))+π(γk(r, θ)-γl(r, θ)) - ожидаемая разность фаз на частоте fj сигналов микросейсмического источника в точках выхода на поверхность лучей Lk(r) и Ll(r), где Гk(r) - время распространения сейсмического сигнала микросейсмического источника вдоль луча Lk(r), γk(r, θ) - индикатор знака деформации среды, создаваемой микросейсмическим источником вдоль луча Lk(r), «0» - сжатие, «1» - расширение,
q(Ψ), Ψ∈[-π, π] - настроечная нелинейная функция процедуры анализа,
m - число трехкомпонентных сейсмометров поверхностной группы сейсмических приемников,
j - множество индексов частот дискретного конечного преобразования Фурье, соответствующее интервалу частот, в котором измеряют сигнал микросейсмического источника,
Q - область земной среды, в которой выявляют микросейсмические источники,
V - область значений параметров θ механизма очага, соответствующая излучению им сейсмических колебаний в направлении апертуры поверхностной группы сейсмических приемников,
при этом первая сумма в функционале ψ(r) вычисляется по всем парам сейсмометров поверхностной группы сейсмических приемников, имеющим различные номера, для которых функция взаимной когерентности на частоте fj. превышает порог, заданный в пороговой функции 
устанавливают значение аргументов r,θ функционала ψ(r), в котором он достигает максимума, и по найденному значению r определяют измеренное значение координат 

| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ | 2011 |
|
RU2451307C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ ПРИ ВОЗДЕЙСТВИИ ПОМЕХ | 2011 |
|
RU2451308C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| ИЗОЛИРУЮЩИЙ СТЫК | 2009 |
|
RU2409722C1 |
| СПОСОБ УДАЛЕНИЯ И ВОЗВРАЩЕНИЯ В ИСХОДНОЕ ПОЛОЖЕНИЕ ТРАВЯНОГО ПОКРЫТИЯ ФУТБОЛЬНОЙ ПЛОЩАДКИ КРЫТОГО СТАДИОНА | 2009 |
|
RU2409723C2 |
| US 6594585 B1, 15.07.2003 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

