Родственные заявки
По этой заявке испрашивается приоритет предварительной заявки № 60/948403 на патент США, поданной 6 июля 2007 г, все содержание которой включено в настоящую заявку путем ссылки.
Область техники
В общем, настоящее изобретение относится к способам и системам для исследования подземных пластов. Более конкретно, это изобретение обращено к способам и системам для обнаружения и определения местоположений микросейсмических событий путем обращения трехкомпонентных микросейсмических данных о волновых сигналах в частотной области.
Уровень техники
Микросейсмические события, также называемые микроземлетрясениями, создаются во время работ по добыче углеводородов и геотермальных флюидов. Обычно микросейсмические события вызываются снятием касательного напряжения с уже существующих геологических структур, таких как разрывы и трещины, вследствие образования наведенных возмущений и привнесения их в локальное напряженное состояние среды. В некоторых случаях микросейсмические события могут вызываться трещиной в породе вследствие обрушения, то есть уплотнения, или вследствие гидравлического разрыва пласта. Такие наведенные микросейсмические события могут быть порождены или инициированы изменениями в коллекторе, такими как истощение, затопление или стимулирование, иначе говоря, извлечением или нагнетанием флюидов. Сигналы от микросейсмических событий могут быть обнаружены в виде упругих волн, распространяющихся от места нахождения события к удаленным датчикам. Регистрируемые сигналы содержат ценную информацию о физических процессах, протекающих внутри коллектора.
Известны различные способы микросейсмического мониторинга, и также известно использование микросейсмических сигналов для мониторинга гидравлического разрыва пласта и обратного нагнетания отходов. Сейсмические сигналы от этих микросейсмических событий можно обнаружить и локализовать в пространстве, используя широкополосные скважинные датчики. Микросейсмическую активность успешно обнаруживают и локализуют в породах, изменяющихся от неконсолидированных песков до мела и до кристаллических пород.
Как рассмотрено выше, чтобы повысить добычу углеводородов из нефтегазовых скважин, можно осуществить гидравлический разрыв подземных пластов, окружающих такие скважины. Гидравлический разрыв пласта используют для создания небольших трещин в подземных пластах, чтобы дать возможность нефти или газу перемещаться в скважину. Пласты разрывают, вводя специально разработанные флюиды под высоким давлением и при больших расходах в пласты через стволы скважины. Гидравлические разрывы обычно продолжаются от ствола скважины на расстоянии от 250 до 750 футов (от 76,2 до 228,6 м) по двум противоположным направлениям в соответствии с естественными напряжениями внутри пласта.
В последнее время делаются попытки осуществлять мониторинг гидравлического разрыва пласта и создавать карты, на которых показываются место возникновения трещины и распространение трещины. Современный мониторинг гидравлического разрыва содержит способы обработки местоположений сейсмических событий картированием времен вступления сейсмических волн и информации о поляризации в трехмерном пространстве с использованием полученных моделированием времен пробега и/или траекторий лучей. Просмотровые таблицы времен пробега можно образовать моделированием с учетом скоростной модели.
Типичные способы картирования обычно известны как нелинейные способы определения местоположений событий и включают в себя выбор и пикинг значений времени из дискретных вступлений сейсмических волн для каждого из многочисленных сейсмических детекторов и картирование для определения местоположения источника сейсмической энергии. Однако, чтобы успешно и точно определять местоположение сейсмического события, дискретные пропикированные значения времени для каждого сейсмического детектора должны соответствовать одному и тому же вступлению «Р»- (продольной) или «S»-волны (поперечной) и должны измеряться вступления, происходящие от одного и того же микросейсмического или сейсмического события. Во время операции разрыва в течение короткого периода времени могут создаваться многие сотни микросейсмических событий. Для современных способов, используемых в промышленности, требуется значительное вмешательство человека в контроль качества результатов пикинга значений времени.
При анализе микросейсмических данных традиционно используют разность между пропикированными временами вступлений S- и P-волн для вычисления дистанции и глубины источника; затем азимутальные поляризации используют для направления. Для инверсий обычно используют модифицированный способ Гейгера, основанный на классическом нелинейном методе наименьших квадратов Левенберга-Марквардта, чтобы определять оптимальные местоположения с неопределенностями. Кроме того, были предложены методы быстрого поиска на сетке. Способы определения местоположения, для которых требуется ручной пикинг волн, являются субъективными и требующими много времени, а способами автоматизированного пикинга, хотя и способными справляться с большим объемом данных, часто получают вводящие в заблуждение зашумленные и усложненные данные. Кроме того, в большей части алгоритмов автоматического пикинга не используется возможность подавления помех, присущих всей группе приемников.
Совсем недавно были представлены основанные на волновых сигналах способы. В одном случае были показаны результаты алгоритма сканирования источника, примененные к данным землетрясения. В другом случае характеристическая функция, основанная на произведении отношений энергий вступлений P- и S-волн, была использована для определения местоположений событий. В еще одном случае были показаны результаты способа двумерной упругой миграции с получением подразумеваемых местоположений событий там, где происходит фокусировка (P+S)-волн. В еще одном случае были показаны результаты акустического способа с использованием обращения времени или фокусировки способом дифракционного суммирования регистрируемых волновых сигналов.
Настоящее изобретение направлено на исключение или по меньшей мере снижение влияний одного или нескольких недостатков, которые являются характерными для прежних способов анализа микросейсмических данных, изложенных выше. К тому же оно направлено на решение важной задачи калибровки, которая является результатом инверсии параметров источника.
Краткое изложение сущности изобретения
Настоящее изобретение удовлетворяет описанным выше и другим требованиям. В частности, согласно изобретению, предложен способ приведения в соответствие волновых сигналов для обработки микросейсмических данных в противоположность основанным на времени вступления и полной инверсии волновых сигналов способам для анализа микросейсмических данных.
Способы и системы настоящего изобретения можно применять к любой микросейсмической операции, относящейся к подземным пластам, включая, но без ограничения ими, операции гидравлического разрыва пласта. Применением принципов настоящего изобретения обеспечиваются способы и системы для мониторинга микросейсмичности. Мониторинг содержит прием микросейсмических волновых сигналов сейсмическими детекторами и оценку параметров источника и/или параметров модели путем обращения регистрируемых данных в частотной пространственной области.
В способах согласно настоящему изобретению пикинг значений времени исключают, вступления Sv-волн включают и используют вектор полной поляризации (не просто азимут). Способы в настоящей заявке относятся к сети произвольно распределенных датчиков, и в них используют анизотропные скоростные модели, в которые включены геометрическое расхождение, потери при распространении волн и неупругое поглощение (Q).
В соответствии с этим задача настоящего изобретения заключается в создании усовершенствованных систем и способов для обработки микросейсмических данных о волновых сигналах. Дальнейшая задача согласно некоторым осуществлениям в настоящей заявке заключается в создании усовершенствованных систем и способов, в которых используется основанный на волновых сигналах подход, где обращение времени методом наименьших квадратов и приведение в соответствие волновых сигналов используются для анализа трехкомпонентных сейсмических данных.
Согласно одному аспекту в настоящей заявке определяют (1) одну функцию источника для P-волны и две функции источника для S-волны, или (2) единственную функцию источника и до шести составляющих тензора момента источника, или (3) функции источника для каждой составляющей тензора момента источника определяют посредством линейной инверсии. Линейная инверсия обеспечивает обращение времени регистрируемых волновых сигналов. В других аспектах настоящего изобретения целевые функции соответствия волновых сигналов получают для определения параметров модели и/или параметров источника посредством нелинейной инверсии.
Согласно некоторым осуществлениям настоящего изобретения предложен способ обработки микросейсмических данных. Способ включает в себя регистрацию трехкомпонентных микросейсмических данных о волновых сигналах; определение меры соответствия волновых сигналов в частотной области, содержащее построение в частотной области по меньшей мере одного функционала несоответствия амплитуд и кросс-фазного функционала между вступлениями; и оценку параметров источника и/или параметров модели. Согласно некоторым аспектам в настоящей заявке построение функционала несоответствия амплитуд содержит определение одной или нескольких функций источника в частотной области с использованием обращения времени. В других аспектах обращение времени содержит обращение времени методом наименьших квадратов.
В некоторых осуществлениях настоящего изобретения определение одной или нескольких функций источника содержит определение одной или нескольких из (1) одной функции источника для P-волны и двух функций источника для S-волны; (2) одной функции источника и по меньшей мере одной составляющей тензора момента источника; и (3) функций источника для каждой составляющей тензора момента источника. Определение одной или нескольких функций источника в частотной области с использованием обращения времени содержит использование анизотропной скоростной модели с неупругим поглощением (Q). Построение кросс-фазного функционала между вступлениями содержит построение функционала спектральной когерентности, усредненного по частоте. В некоторых осуществлениях способ содержит поворот данных о волновых сигналах к географической системе координат Восток, Север, Верх (ENU).
Микросейсмические данные о волновых сигналах можно регистрировать множеством трехкомпонентных геофонов. Согласно аспектам в настоящей заявке способ может содержать совместную χ2-функцию правдоподобия, содержащую функционал несоответствия амплитуд и кросс-фазный функционал с многомерным априорным распределением вероятности; и максимизацию или выбор функции апостериорной вероятности с использованием методов глобального поиска. Микросейсмические данные о волновых сигналах можно регистрировать во время операции гидравлического разрыва пласта. Микросейсмические данные о волновых сигналах можно регистрировать во время операции перфорирования.
В некоторых аспектах настоящего изобретения способ содержит определение одной или нескольких функций источника в частотной области с использованием уравнения 1, приведенного ниже. Согласно другим аспектам в настоящей заявке функционал несоответствия амплитуд представляется уравнением 3, приведенным ниже. В других аспектах настоящего изобретения кросс-фазный функционал между вступлениями представляется уравнением 6, приведенным ниже. Согласно другим аспектам в настоящей заявке совместную функцию апостериорной вероятности вектора m модели получают, используя уравнение 10, приведенное ниже.
В некоторых осуществлениях настоящего изобретения способ содержит формирование изображений отражающих границ между местом нахождения источника и приемниками, содержащее определение одной или нескольких функций источника в частотной области с использованием обращения времени; деконволюцию трехкомпонентных остаточных данных и миграцию восстановленных из свертки остаточных данных с использованием калиброванной скоростной модели для получения местоположений отражающих границ. Другие аспекты включают в себя калибровку скоростной модели с использованием абсолютных времен вступления, регистрируемых от взрыва при перфорировании. Другие аспекты включают в себя определение совместной χ2-функции правдоподобия на протяжении трехмерной (3D) карты для каждого временного окна данных, при этом совместная χ2-функция правдоподобия содержит функционал несоответствия амплитуд и кросс-фазный функционал с многомерным априорным распределением вероятностей; максимизацию или выбор функции апостериорной вероятности с использованием методов глобального поиска для каждого временного окна данных и показ трехмерных данных в виде кинофрагмента эволюции времени пространственного распределения когерентной, обращенной во времени сейсмической энергии.
Настоящим описанием предоставляется способ получения параметров модели и источника на основании микросейсмических волновых сигналов, содержащий регистрацию трехкомпонентных микросейсмических волновых сигналов; определение меры соответствия волновых сигналов в частотной области, содержащее построение в частотной области по меньшей мере одного функционала несоответствия амплитуд и кросс-фазного функционала между вступлениями; и оценивание местоположения источника, механизма действия источника и/или атрибутов источника. В некоторых аспектах местоположение источника содержит триплет (x, y, z) для каждого события. В других аспектах механизм действия источника содержит один или несколько параметров модели, параметры анизотропии, гладкость модели, наклон модели, масштабирование скорости и неупругое поглощение (Q).
В других аспектах настоящего изобретения зависящие от угла параметры анизотропии поступают из акустических измерений, при этом они задаются акустическими измерениями или задаются любым представителем меры объема глины. Согласно другим аспектам в настоящей заявке неупругое поглощение (Q) содержит одну или несколько Qp, Qs1 и Qs2, где S1 и S2 однозначно связаны с Sv и Sh в поперечно-изотропной среде. В дальнейших аспектах настоящего изобретения атрибуты источника содержат одно или несколько из амплитуды, доминирующей частоты, угловой частоты и скалярного момента. В дальнейших аспектах амплитуда включает в себя отношение амплитуды Sh-волны к амплитуде P-волны.
Согласно изобретению предложена система для обработки микросейсмических данных, содержащая акустический прибор, содержащий по меньшей мере один трехкомпонентный геофон, установленный на нем; компьютер в связи с акустическим прибором и набор инструкций, выполняемых компьютером, при выполнении которых регистрируются трехкомпонентные микросейсмические данные о волновых процессах; определяется мера соответствия волновых сигналов в частотной области, при этом производят построение в частотной области по меньшей мере одного функционала несоответствия амплитуд и кросс-фазный функционал между вступлениями; и оценивают параметры источника и/или параметры модели. В некоторых аспектах настоящего изобретения по меньшей мере один трехкомпонентный геофон содержит множество трехкомпонентных геофонов. Согласно другим аспектам система может быть выполнена или предназначена для операций гидравлического разрыва. Согласно другим аспектам в настоящей заявке система может быть выполнена или предназначена для операций перфорирования.
Согласно некоторым аспектам изобретения предложена система, которая может быть выполнена или предназначена для операций постоянного или пассивного мониторинга. Система может быть выполнена или предназначена для межскважинных операций.
Дополнительные преимущества и новые признаки будут изложены в описании, которое следует ниже, или они могут быть усвоены специалистами в данной области техники при чтении этих материалов или практическом использовании изобретения. Преимущества могут быть достигнуты с помощью средств, перечисленных в прилагаемой формуле изобретения.
Краткое описание чертежей
Сопровождающими чертежами иллюстрируются предпочтительные варианты осуществления изобретения. Совместно с нижеследующим описанием на чертежах демонстрируются и поясняются принципы настоящего изобретения, на которых:
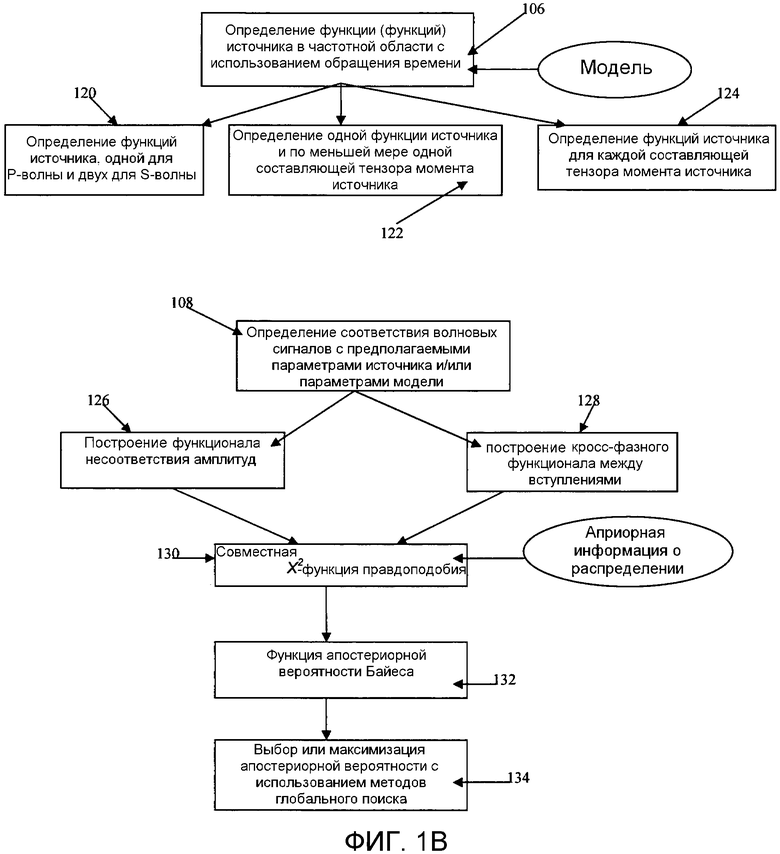
фиг. 1А и 1В - блок-схемы последовательности операций, иллюстрирующие способы обработки микросейсмических данных в соответствии с описанием в настоящем изобретении;
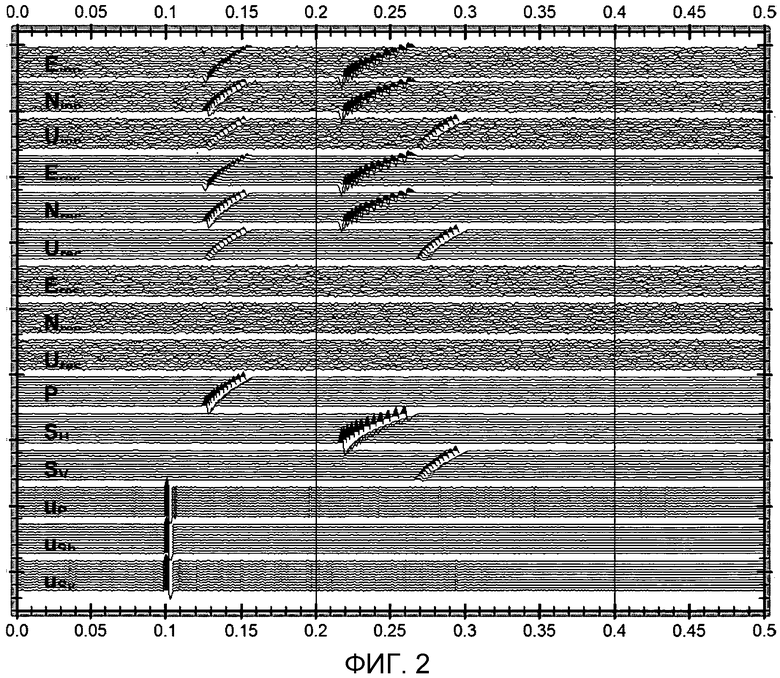
фиг.2 - график, представляющий синтетические данные о событиях, сверху вниз показаны входные данные в координатах Восток, Север, Верх (ENU); восстановленные данные в координатах Восток, Север, Верх; остаточные данные в координатах Восток, Север, Верх; оцененные функции источника для P-, Sh- и Sv-волн, полученные прямым моделированием и сохраненные в скалярной форме; и оцененные функции источника в момент времени t0+100 мс, каждая повторена 12 раз;
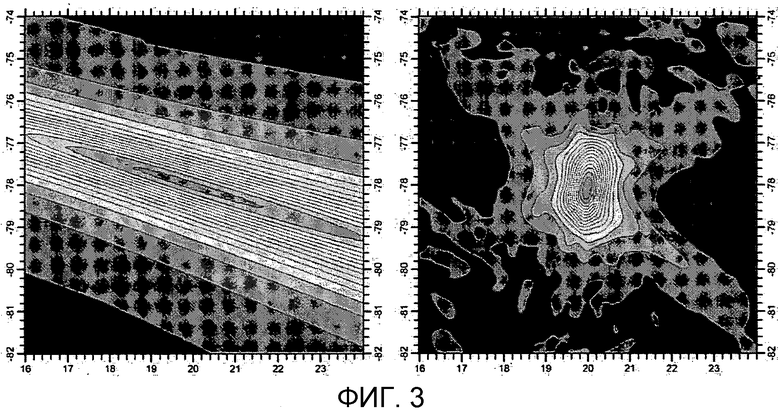
фиг.3 - изображения в изолиниях апостериорных форм (слева) функционала (уравнение 3) несоответствия амплитуд и (справа) кросс-фазного функционала или функционала спектральной когерентности (уравнение 6), оконтуренных в плоскости расстояние-глубина, содержащей вертикальную группу приемников; событие расположено на r=2000 футов (609,6 м), z=7800 футов (2377,44 м), оба графика имеют 800 футов (243,84 м) по боковой поверхности;
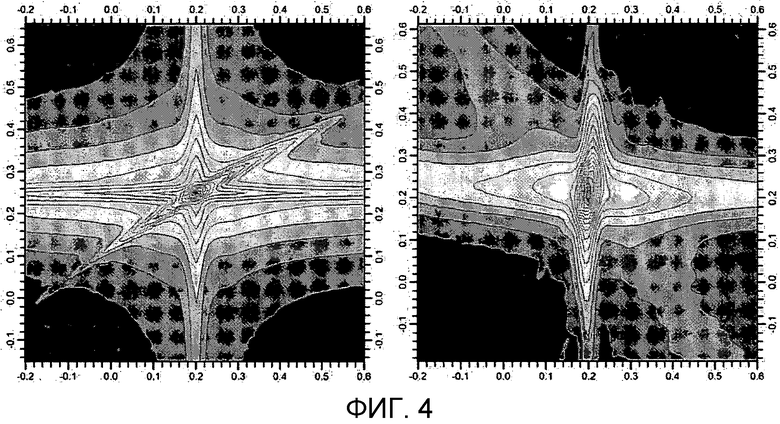
фиг.4 - изображения в изолиниях совместной апостериорной вероятности (уравнение 10), оконтуренной для диапазонов двух значений анизотропии при сохранении третьего значения фиксированным на уровне точного значения; слева: γ в зависимости от ε; справа: неэллиптичность в зависимости от ε;
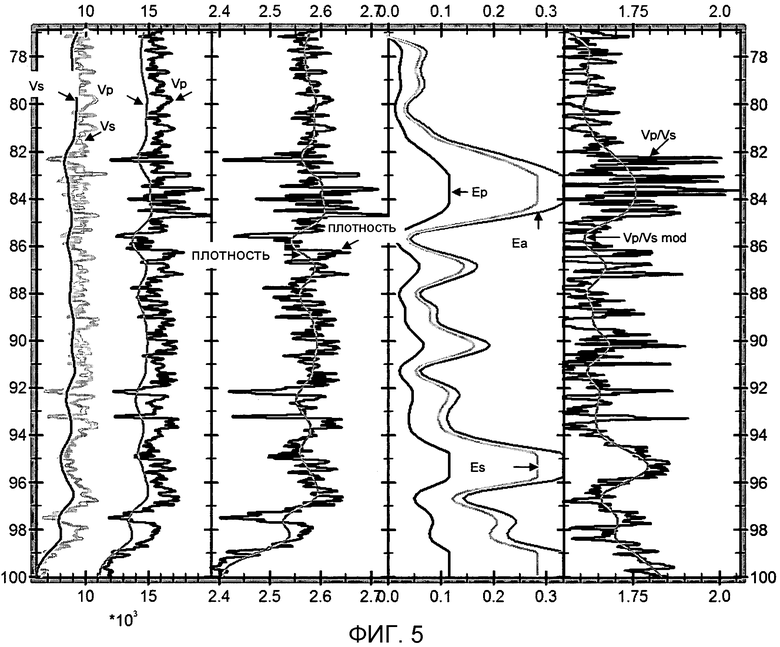
фиг.5 - каротажные диаграммы и оптимально сглаженная анизотропная скоростная модель; величины анизотропии задаются каротированным отношением Vp/Vs, и определен постоянный масштабный множитель скорости;
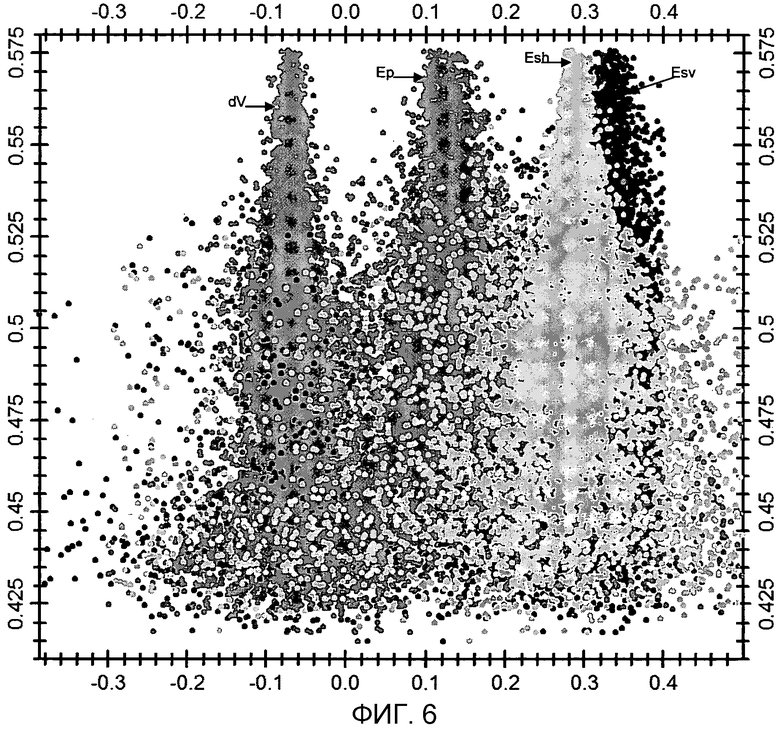
фиг.6 - изображение комбинированной апостериорной вероятности (уравнение 10) при реализации выборочного метода с имитацией отжига во время калибровки модели по взрыву при перфорировании; показаны масштабирование (dV) скорости и три параметра анизотропии (гладкость модели не показана);
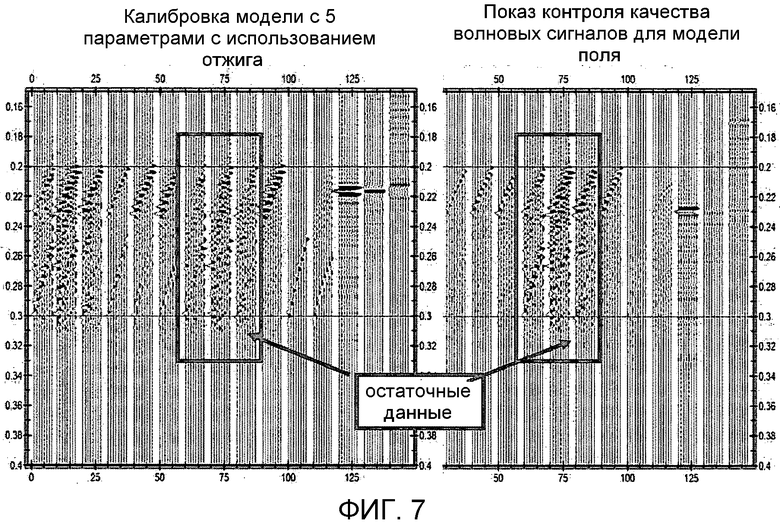
фиг.7 - графическая иллюстрация волновых сигналов от взрывного источника при перфорации с таким же порядком отображения, как и на фиг.2, в случае калибровки (слева, настоящее изобретение) отжигом модели с пятью параметрами и в случае модели поля (справа);
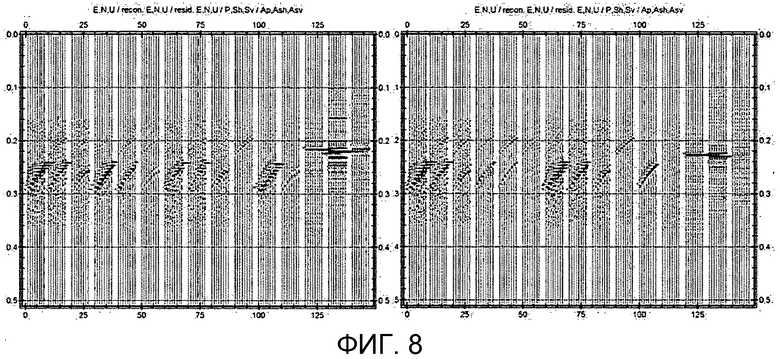
фиг.8 - графические изображения волновых сигналов микросейсмических событий с таким же порядком отображения, как и на фиг.2, для случая использования калиброванной отжигом модели (слева, настоящее изобретение) с пятью параметрами из фиг. 6 и для случая модели поля (справа);
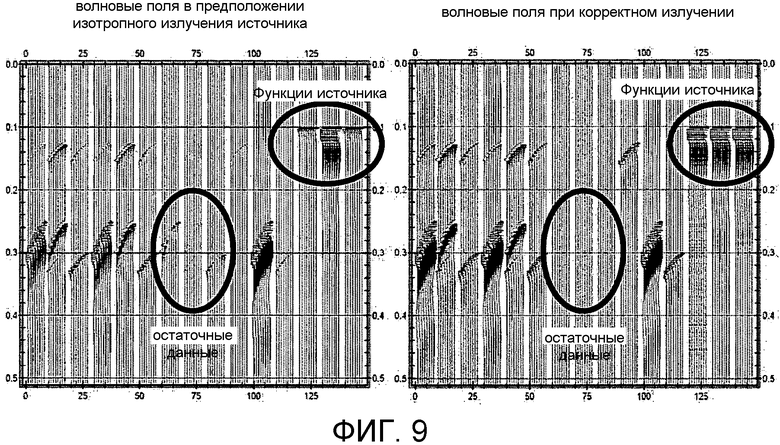
фиг.9 - синтетические волновые сигналы микросейсмических событий от составного источника с тензором момента с таким же порядком отображения, как и на фиг.2; слева: постоянное всенаправленное излучение; и справа: использование корректного тензора момента;
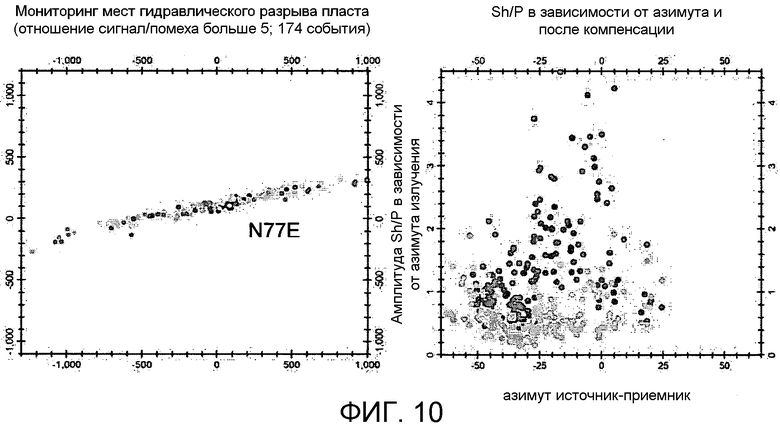
фиг.10 - зависимости местоположений реальных микросейсмических событий от момента времени события (слева) и отношение амплитуд волн Sh и P в результате обращения времени методом наименьших квадратов в зависимости от азимута источник-приемник в предположении постоянной амплитуды источника (темные точки) и в предположении двухдипольного источника в чистом виде с вертикальным простиранием плоскости трещин по N77E (справа); и
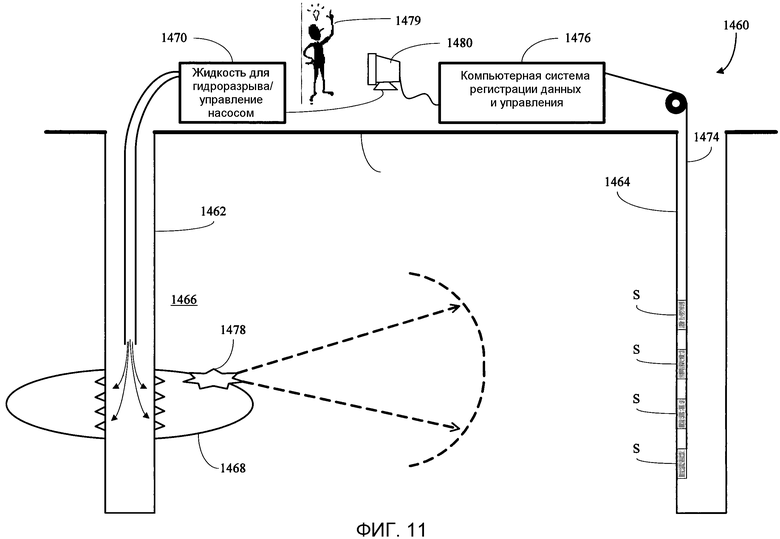
фиг.11 - пример системы в соответствии с одним осуществлением настоящего изобретения.
На всех чертежах одинаковыми позициями обозначены аналогичные, но необязательно идентичные элементы.
Подробное описание
Варианты осуществления изобретения и объекты изобретения описываются ниже. Конечно, должно быть понятно, что при разработке любого такого реального осуществления необходимо принимать многочисленные специфические для реализации решения для достижения специфических целей разработчика, таких как соблюдение связанных с системой и связанных с деловой активностью ограничений, которые будут изменяться от одной реализации к другой. Кроме того, должно быть понятно, что такие работы могут быть сложными и требующими больших затрат времени, но тем не менее должны быть обычным делом для специалиста в данной области техники, имеющего выгоду от этого изобретения.
Слова «включающий в себя» и «имеющий», используемые в описании, в том числе в формуле изобретения, имеют то же самое значение, что и слово «содержащий».
В настоящем описании рассматриваются способы и системы с использованием способов инверсии, в которых микросейсмические данные, регистрируемые, например, сетью трехкомпонентных геофонов, предполагаются представляющими сумму одного вступления продольной (Р) волны и одного или двух вступлений поперечной (S) волны. В некоторых аспектах настоящего изобретения используется по меньшей мере одно вступление любого типа. Согласно другим осуществлениям в настоящем изобретении может быть большее количество вступлений, а не три вступления.
В аспектах настоящего изобретения способы инверсии выполняют в области частотного пространства. Инверсия включает в себя линейную инверсию для волновых сигналов источника и нелинейную инверсию для свойств модели или параметров источника. Линейной инверсией эффективно обращают время, используя функцию трассы луча Грина для восстановления волновых сигналов источника. В случае нелинейной инверсии производят построение двухчастного функционала приведения в соответствие волновых сигналов. В первой части собирается информация о приращении времени пробега волны и поляризации из-за несоответствия данных по методу наименьших квадратов. Во второй части собирается информация из разностей времен вступления S- и Р-волн посредством функционала кросс-фазной спектральной когерентности. Обе части можно масштабировать и суммировать для образования совместной χ2-функции несоответствия, которая может быть объединена с непроверенной априорной информацией в функции апостериорной вероятности Байеса. В настоящем раскрытии предполагается использование методов глобального алгоритмического поиска для максимизации функции апостериорной вероятности.
В настоящем изобретении предполагается калибровка модели путем обращения данных управляемого источника, например взрывных источников при перфорировании, на основании известных мест возмущения скорости, анизотропии, гладкости модели и при желании Q. Параметры источника микроземлетрясения определяют (с учетом калиброванной модели) путем минимизации того же самого совместного функционала волновой сигнал + кросс-фаза, используя методы глобального поиска. Параметры источника (составляющие тензора момента) находят при определенных допущениях.
Поскольку процедура включает в себя приведение в соответствие волновых сигналов, пикинг значений времени не требуется, но если пропикированные значения времени имеются, их можно использовать, включив дополнительный член в целевую функцию. Всю группу приемников и вектор полной поляризации используют для повышения отношения сигнал/помеха слабых вступлений. Наличие вступления Р-волны не является обязательным для определения местоположения. Многочисленные взрывы при перфорировании можно обращать одновременно в случае оптимальных параметров модели, и произвольное распределение приемников (например, в многочисленных скважинах или в пунктах на поверхности) можно использовать, чтобы осуществлять обращение для получения местоположения. Инверсия дает возможность осуществлять автоматизированный объективный анализ данных с выраженными количественно неопределенностями в оцененных параметрах.
Согласно изобретению предложен основанный на волновых сигналах способ, в котором обращение времени методом наименьших квадратов и приведение в соответствие волновых сигналов используют для анализа трехкомпонентных микросейсмических данных. (1) Определяют одну функцию источника P-волны и две функции источника S-волны или (2) определяют единственную функцию источника, но определяют до шести составляющих тензора момента посредством линейной инверсии, которую можно интерпретировать как обращение времени регистрируемых волновых сигналов. Для решения нелинейной задачи определения параметров модели или параметров источника составляют целевые функции соответствия волновых сигналов.
Как дополнительно подробно описано ниже, способами, показанными на блок-схемах последовательности действий из фиг. 1А и 1В, обеспечиваются оценки параметров источника и/или параметров модели.
Способами настоящего изобретения обеспечивается новый и эффективный контроль качества (КК) параметров источника и модели путем оценивания и индикации во временной области функций источника. В других аспектах настоящего изобретения предложены способы для представления в количественной форме оптимальности параметров источника и модели.
Что касается фиг.1А, то трехкомпонентные микросейсмические данные регистрируют (этап 100), используя, например, сеть трехкомпонентных геофонов.
В настоящем изобретении для регистрации микросейсмических волновых сигналов предполагаются приемники различных типов. Хотя в раскрытии упоминаются геофоны в качестве одного примера приемников, можно использовать любой подходящий сейсмический приемник (приемники), расположенные так, как это желательно или необходимо. Например, приемники могут быть расположены на поверхности, в горизонтальных скважинах, в многочисленных скважинах, наряду с другими расположениями, которые известны специалистам в данной области техники. В дополнение к этому для задач, например, калибровки модели данные можно регистрировать с использованием межскважинной геометрии.
Данные о волновых сигналах, регистрируемые на приемниках, могут исходить от источников различных типов, например, средств гидравлического разрыва пласта, перфорирующей пушки, торпед, наряду с другими источниками, которые являются пригодными для задач, описанных в настоящей заявке. Например, обратите внимание на фиг. 11. В дополнение к этому способы, описанные в настоящем изобретении, можно осуществлять из центров данных, расположенных на площадке скважины и/или вне площадки. Такие центры данных известны из уровня техники; поэтому в настоящем изобретении эти аспекты систем подробно не описываются.
Зарегистрированные волновые сигналы могут быть повернуты (этап 102) к географической системе координат, например к географической системе координат Восток, Север, Верх (ENU).
Данные о волновых сигналах преобразуют (этап 104) в частотную область. Способами, раскрытыми в настоящем изобретении, обеспечивается обработка микросейсмических волновых сигналов в частотной области. При этом обработка микросейсмических данных в частотной области обеспечивает преимущества по сравнению с временной областью, такие как, но без ограничения ими, легкость интерпретации поглощения и дисперсии, обусловленных Q; интерпретация долговременных записей и кодов событий без различения вступлений; оперирование с временными сдвигами как с линейными фазовыми сдвигами, исключающее интерполяцию; использование алгоритмов глобального поиска с мультиразрешением при меньших вычислениях.
Функции источника определяют (этап 106) в частотной области, используя обращение времени, и определяют (этап 108) функционал соответствия волновых сигналов с предполагаемыми параметрами источника и/или параметрами модели. Параметры источника и/или параметры модели оценивают (этап 110), используя методы глобального поиска. Эти методы рассмотрены подробно ниже.
Методы глобального поиска, такие как метод Монте-Карло с использованием цепей Маркова, симплекс-метод, методы глобального поиска с мультиразрешением и многочисленными сетками, можно использовать в соответствии с принципами, рассмотренными в настоящей заявке. В настоящем раскрытии предполагается, что неопределенности оцениваемых параметров определяются в зависимости от выбранных методов поиска. Например, одним предпочтительным методом является метод Монте-Карло с использованием цепей Маркова, в соответствии с которым производятся выборки функции распределения апостериорной вероятности, и выявляется компромисс между параметрами, и отображаются любые возможные многочисленные экстремумы.
На фиг. 1В показаны способы обработки, относящиеся к определению (этап 106) функций источника в частотной области с использованием обращения времени и определению (этап 108 на фиг. 1А) соответствия волновых сигналов с использованием предполагаемых параметров источника и/или модели. Способы настоящей заявки применимы для калибровки модели и инверсии параметров источника. Параметры модели могут включать в себя, но без ограничения ими: анизотропию, гладкость модели и Q; параметры источника могут включать в себя, но без ограничения ими, местоположение (Восток, Север, Верх), тензор момента источника или сами функции источника, включающие в себя соответствующие атрибуты, такие как амплитуды и их отношения (например, отношение амплитуд поперечной волны Sh с горизонтальной поляризацией и продольной волны P), доминирующая частота, угловая частота и скалярный момент.
Как показано на фиг. 1В, в соответствии с принципами, рассмотренными в настоящей заявке, можно определять (этап 120) одну функцию источника для P-волны и две функции источника для S-волны, можно определять (этап 122) одну функцию источника и по меньшей мере одну составляющую тензора момента источника и/или можно определять (этап 124) функции источника для каждой составляющей тензора момента источника.
На фиг. 1В показано, что соответствие волновых сигналов предполагаемым параметрам источника и/или параметрам модели можно определить, составив по меньшей мере один функционал (этап 126) несоответствия амплитуд и/или кросс-фазный функционал (этап 128) между вступлениями. Два функционала можно объединить (этап 130) в виде совместной χ2-функции правдоподобия и при наличии априорной информации о распределении получить (этап 132) функцию апостериорной вероятности Байеса. Апостериорную вероятность можно максимизировать или выбрать (этап 134), используя методы глобального поиска.
Априорная информация о распределении включает в себя любую априорную информацию, которую можно использовать для ограничения любого неизвестного параметра. Например, при наличии вектора параметров модели можно ограничивать сглаживающее ядро, при наличии вектора параметров источника можно ограничивать глубину определения местоположения и т.д.
В соответствии с настоящим раскрытием дается описание способов обработки микросейсмических данных. Рассмотрим сеть трехкомпонентных геофонов на местах x, регистрирующих векторные (трехкомпонентные) данные d. Данные предполагаются ориентированными относительно географической системы координат (Восток, Север, Верх) и преобразованными в частотную область. На каждой угловой частоте ω данные предполагаются состоящими из вступлений на приемники одной продольной (Р) и двух поперечных (с вертикальной поляризацией, Sv, и с горизонтальной поляризацией, Sh) волн. Для случая единственного источника, излучающего P-, Sh- и Sv-волны, и принимая во внимание только вступления прошедших прямых волн, данные можно описать следующим уравнением:

где нижний индекс k указывает на волны трех различных типов (P, Sv, Sh), а j является индексом приемника; uk(ω) представляет функцию перемещения источника для волны k-го типа; Skj является амплитудой излучения источника; Tkj представляет полные потери при распространении волн вдоль лучей; Gkj представляет геометрическое расхождение; tkj является временем вступления; Qkj является взвешенным по времени средним гармоническим значением (изотропного) Q вдоль луча; fr является опорной частотой для моделирования поглощения, обусловленного Q, частотой, на которой отсутствует дисперсия фазы; и h kj является вектором поляризации на приемнике.
Величины S, T, G, t, Q и h вычисляют трассированием лучей после установления допущения относительно тензора момента источника. Например, для вычисления может быть использована слоистая поперечно изотропная модель с вертикальной осью симметрии, точная для моментов времени, расхождения, потерь при распространении волн и поляризаций, но изотропная для Q и для амплитуды излучения вблизи источника. Ради краткости в уравнение (1) не включено местоположение x S источника, а зависимость перечисленных выше величин от поперечно-изотропной модели с вертикальной осью симметрии неявно подразумевается.
Уравнение (1) может быть записано в матрично-векторной форме с тремя неизвестными функциями uk(ω) источника, представленными вектором m=(uP, uSv, uSh)T модели и G, комплексным линейным оператором (N×3) (N является количеством компонент приемника), представляющим остаток из правой части уравнения (1). Инверсия методом наименьших квадратов дает оценку m в виде:

где знак ∗ означает комплексную сопряженную транспозицию, изменяющую знак множителя времени в аргументах сложной показательной функции в уравнении (1); I является матрицей идентичности; β является небольшой скалярной величиной.
Уравнение (1) можно интерпретировать как обратное распространение или обращение времени регистрируемых данных, основанное на функции хода луча Грина. После решения уравнения (2) на каждой угловой частоте ω и обратного преобразования Фурье восстанавливают функции источник-время, компенсированные за влияния распространения между местом нахождения источника и приемниками. Отметим, что инверсия матрицы G∗G в дополнение к компенсации за затухания амплитуд (совместно с G∗) также является полезной для восстановления из свертки характеристики группы и подавления интерференции волнового типа (перекрестных помех) в соответствии с параметром β регуляризации или демпфирования. Также отметим, что проекцию движения частиц на ортогональные компоненты приемника не выполняют, возвращая в прежнее состояние амплитуду скалярной функции источника.
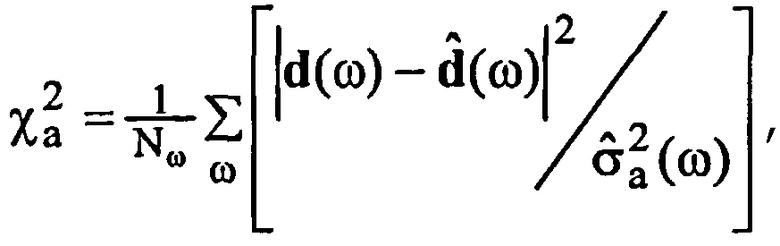
Настоящим изобретением также предложена целевая функция для определения, насколько хорошо совокупность параметров возможного источника или модели воспроизводит данные. Очевидный выбор заключается во введении оцененных значений uk(ω) обратно в уравнение (1) для образования новых данных,  . Суммирование по частотам и нормирование на надлежащим образом выбранную дисперсию шума позволяет составить χ2-функционал несоответствия амплитуд:
. Суммирование по частотам и нормирование на надлежащим образом выбранную дисперсию шума позволяет составить χ2-функционал несоответствия амплитуд:

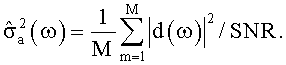
где Nω представляет собой количество частот. Отметим, что если  приравнять к дисперсии данных, то уравнение (3) ограничивается между 0 и 1 и становится равным 1 - мера когерентности. На практике
приравнять к дисперсии данных, то уравнение (3) ограничивается между 0 и 1 и становится равным 1 - мера когерентности. На практике  приравнивают к дисперсии данных, деленной на отношение сигнал/помеха или SNR. Для большей части реальных данных выбором SNR=2 обеспечивается получение χ2, близкого к 1.
приравнивают к дисперсии данных, деленной на отношение сигнал/помеха или SNR. Для большей части реальных данных выбором SNR=2 обеспечивается получение χ2, близкого к 1.
Целевая функция соответствия амплитуд из уравнения (3) определяет количественно, насколько хорошо волновые сигналы соответствуют данному источнику и/или модели. В уравнении (3) собрана информация, содержащаяся в приращении времени пробега волны и поляризациях волн трех типов (P, Sv, Sh) и низкочастотных колебаниях потенциала регулирования диаграммы направленности группы, но волны различных типов обрабатывают независимо, наличия только одной достаточно, чтобы определить местоположение источника, используя уравнение (3).
Для сбора информации, содержащейся в традиционно используемой разности времен вступления поперечной и продольной волн, производят построение функционала, основанного на фазе взаимного спектра. Один такой функционал представляет собой спектральную когерентность, определяемую на каждой частоте f как:
где

при этом для S xx и S yy выражения являются аналогичными. В уравнении (4) S xy представляет попарную корреляцию оцененных функций uk(ω) источника. На практике при вычислении уравнения (4) используют математические ожидания и осуществляют усреднение в пределах пар функций источника, например трех пар: P-Sh, P-Sv, Sh-Sv.
Математическое ожидание из уравнения (4) имеет вид:
 (5)
(5)
которое ограничено согласно [0, 1]. Поскольку оно является ограниченным, его легко объединять с уравнением (3) для образования совместной функции правдоподобия и с многомерным распределением априорной вероятности для образования апостериорной вероятности Байеса. По аналогии с (3), приравнивая к 1 - мера когерентности, в случае надлежащим образом выбранной  получим
получим

где p означает «фазу», теперь уравнение (6) аналогично уравнению (3), при этом

где M является количеством геофонов (количеством трехкомпонентных приемников, умноженным на 3). Несмотря на то что два функционала несоответствия, уравнение (3) и уравнение (6), являются принципиально различными, их вычисляют на основании полностью одинаковых данных и поэтому по умолчанию с одинаковым весом. Таким образом, в полном несоответствии данных

значение α по умолчанию полагают равным 0,5. N r является количеством компонент приемника, то есть количеством независимых данных. Различие между уравнением (3) и уравнением (6) обнаруживается в том, что взаимная спектральная когерентность (уравнение 6) будет совершенно неинформативной при условии регистрации вступления волны одного типа (например, только Sh), поскольку она основана на корреляции оцененных функций источника, тогда как функционал (уравнение 3) несоответствия амплитуд или меры когерентности будет оставаться информативным в случае, когда регистрируют вступление волны только одного типа.
Для наложения ограничений на параметры нелинейной модели, например анизотропии модели, гладкости, Q или любого из параметров источника, предполагают многомерное нормальное распределение априорной вероятности. Логарифмическое правдоподобие вектора параметров модели относительно априорных ожидаемых значений аппроксимируют в предположении нулевой ковариации между параметрами модели. Вклад априорного в совместное апостериорное, где i обозначает параметр модели, составляет:

где µ является ожидаемым значением и σ стандартным отклонением.
Наконец, совместная апостериорная вероятность конкретного вектора m модели при заданных данных d и априорной информации I имеет вид

где на практике отрицательную величину логарифма используют при минимизации поисков за исключением случая применения выборочных методов Монте-Карло.
Целевые функции соответствия волновых сигналов из уравнения (3) и уравнения (6), используемые отдельно или в сочетании, приводят к апостериорной вероятности Байеса, которой количественно определяется, насколько хорошо данная модель и местоположение источника соответствуют наблюдаемым данным, при желании с учетом многомерного распределения априорной вероятности. Параметры представляющей интерес однократно отраженной волны в микросейсмической задаче, а именно координаты (x, y, z) местоположения события, или параметры, выбираемые для описания скоростной модели, вводят в задачу нелинейно и определяют путем максимизации апостериорной вероятности, используя тот же самый алгоритм глобального поиска.
Для иллюстрации способов настоящего изобретения был образован набор синтетических микросейсмических данных с использованием однородной анизотропной (поперечно-изотропной с вертикальной осью симметрии) модели с источником, расположенным на расстоянии 2000 футов (609,6 м) от единственной (вертикальной) контрольной скважины, содержавшей 12 приемников, расставленных с промежутками 75 футов (22,86 м). Источник располагали на 275 футов (83,82 м) ниже самого заглубленного приемника на азимуте N138W, при этом составной механизм действия источника определялся вертикальным простиранием по азимуту N5W трещин, на 40% двухдипольным источником, на 30% диполем растяжения, нормальным к трещине, и на 30% изотропными компонентами. Использовали значения анизотропии (ε, γ, δ)=(0,2; 0,25; 0,1) и QP=Qsh=Qsv=100, сейсмический импульс источника имел причинно обусловленную трапецеидальную форму с частотами 4-150-200-450 Гц. Добавляли гауссовский шум со стандартным отклонением, соответствующим 10% амплитуды на источнике.
На фиг.2 показаны сверху вниз входные данные в системе координат восток, север верх (ENU); восстановленные данные  в системе координат восток, север, верх; остаточные данные в системе координат восток, север, верх; оцененные функции источника P-, Sh- и Sv-волн, полученные прямым моделированием, но сохраненные в их скалярной форме; и оцененные функции источника при t0+100 мс, каждая из которых повторена 12 раз. Поскольку использованные модель, параметры источника и механизм действия источника являются точными, остаточные данные (временная область аналогична уравнению (3)) содержат только помеху и функции источник-время, все с одинаковой амплитудой. Этот последний аспект обусловлен зависящей от угла диаграммой излучения источника, не «подавленной» в процессе обращения времени методом наименьших квадратов (обратите внимание на уравнение 2).
в системе координат восток, север, верх; остаточные данные в системе координат восток, север, верх; оцененные функции источника P-, Sh- и Sv-волн, полученные прямым моделированием, но сохраненные в их скалярной форме; и оцененные функции источника при t0+100 мс, каждая из которых повторена 12 раз. Поскольку использованные модель, параметры источника и механизм действия источника являются точными, остаточные данные (временная область аналогична уравнению (3)) содержат только помеху и функции источник-время, все с одинаковой амплитудой. Этот последний аспект обусловлен зависящей от угла диаграммой излучения источника, не «подавленной» в процессе обращения времени методом наименьших квадратов (обратите внимание на уравнение 2).
Целевые функции соответствия волновых сигналов, выраженные в виде апостериорных вероятностей, показанные на фиг.3, вычислены на сетке в плоскости расстояние-глубина, содержащей источник и приемники. Соответствие амплитудным волновым сигналам отчетливо отражает эффект формирования диаграммы направленности группы, но имеется плохое разрешение вдоль пучка лучей, в то время, как и ожидалось, функционал спектральной когерентности демонстрирует лучшую локализацию на расстоянии. Фактически, функционал пространственной когерентности включает в себя член диаграммы направленности, поскольку в нем используются функции источника, оцениваемые при трехкомпонентном формировании диаграммы направленности, но для этого требуется наличие волн по меньшей мере двух типов (например, P и Sh), тогда как функционал амплитуд или диаграммы направленности может указывать на местоположение события при наличии волны единственного типа, хотя с большей неопределенностью в направлении пучка лучей. Их можно использовать совместно, например, для поиска в случае оптимальных параметров модели.
До определения местоположений микросейсмических событий скоростную модель, обычно создаваемую на основании акустических каротажных данных, необходимо прокалибровать. Для этого требуется корректировка параметров модели, обычно значений анизотропии, с тем, чтобы местоположение источника, например взрывного источника при перфорировании, из предполагаемого известного места определялось правильно. При построении исходной модели обычно используют форму усредняющих или блокирующих медленностей акустической волны для построения модели слоистой среды. Имеет смысл применение некоторого минимального количества сглаживаний к медленности акустической волны до блокирования, поскольку сами сейсмические волны реагируют на средние свойства. Длина фильтра скользящего среднего должна быть соотнесена с длиной волны доминирующей частоты. Использование минимальной скорости поперечной волны, например 7500 фут/с (2286 м/с), и 250 Гц для доминирующей частоты приводит к сглаживающему фильтру длиной 30 футов (9,144 м). Большее сглаживание можно применять, если имеются поперечные вариации или неопределенности глубины, при этом идея не относится к случаю, когда мы находимся в неизвестности.
В предположении известного положения источника анизотропию модели можно определить путем максимизирования апостериорной вероятности соответствия волновых сигналов, описанной в предыдущем разделе. На фиг.4 показаны карты изолиний совместной апостериорной вероятности для синтетических данных из фиг.2, центрированные относительно истинных значений параметров анизотропии. Показаны зависимость γ Томсена от ε при поддержании фиксированными точных значений δ и зависимость неэллиптичности (Шеенберга) от ε при поддержании фиксированными точных значений γ. Следует отметить компромисс между ε и γ. Анизотропия также является компромиссной в зависимости от геометрии и в зависимости от масштабирования скоростей P- и S-волн.
Для калибровки модели возможно некоторое количество вариантов, включая обращение для анизотропии, масштабирование скорости (приближенную поправку за ошибки геометрии), Q и даже оптимальную гладкость модели. Значения параметров анизотропии можно приравнять к значениям, получаемым на основании акустического каротажа, или их величины можно задать на основании вспомогательного каротажа, например гамма-каротажа или каротажа VP/VS, данные обоих каротажей используют в качестве представителя Vглины (объема глины, предполагается, что он является чувствительным к анизотропии в случае поперечной изотропии с вертикальной осью симметрии). Выборочный метод Монте-Карло используют при глобальном поиске оптимальных параметров модели, что позволяет достичь компромисса между неохваченными параметрами и получить оценки неопределенности для неизвестных моделей.
На фиг.5 показана модель, восстановленная путем приведения в соответствие данных о волновых сигналах от взрывного источника при перфорировании. Оценивали пять параметров модели, используя алгоритм имитации отжига для максимизации совместной апостериорной вероятности (обратите внимание на уравнение (10)). Априорное ограничение на параметры модели не использовали. На фиг.6 показана апостериорная вероятность для четырех параметров модели, значения которых были выбраны во время процесса имитации отжига. На фиг.7 показаны данные о волновых сигналах от взрывного источника при перфорировании, использованные при калибровке модели, и соответствующие волновые сигналы в случае использования модели поля. Остаточные данные меньше, а функции источника лучше выровнены и имеют большие амплитуды в случае соответствия волновых сигналов калиброванной модели.
Результат применения обращения времени методом наименьших квадратов и приведения волновых сигналов в соответствие реальному микросейсмическому событию показан на фиг.8, при этом использовались калиброванная модель, определенная ранее, и модель поля. И опять остаточные данные соответствия волновым сигналам являются меньшими и менее когерентными, оцененные функции источника больше по амплитуде, и теперь функция источника волны Sv особенно проявляется. Заметно, что здесь излучение Sjk источника приравнено к 1, что эффективно усредняет амплитуду излучения по углу наклона. Но в случае модификации уравнения (1) предложенные способы можно использовать, чтобы осуществлять обращение для тензора момента, чувствительного к диаграмме излучения источника.
В прямой модели, описываемой уравнением (1), предполагается наличие трех функций u k(ω) источника для Р-, Sh-, Sv-волн с использованием предполагаемой диаграммы S jk излучения источника. Фактически, S jk вычисляют с учетом (шести) коэффициентов (Mxx, Myy, Mzz, Mxy, Mxz, Myz) тензора момента и углов (θ, φ) ориентации лучей на источнике. Поэтому уравнение (1) можно модифицировать, чтобы осуществлять обращение для шести функций источника вместо трех, или можно модифицировать, чтобы осуществлять обращение для единственной функции u k(ω) источника и шести коэффициентов тензора момента источника. Поскольку при регистрации в единственной вертикальной буровой скважине все коэффициенты тензора момента не связаны ограничениями, то в дальнейшем осуществлении настоящего изобретения обеспечивается восстановление ограниченного или приведенного тензора момента. Одна инверсия представляет собой восстановление относительных величин двухдипольного источника и протяженного диполя, излучающих от вертикальной плоскости разрыва. Эта задача имеет два ненулевых момента и один нелинейный параметр, азимут плоскости разрыва.
В качестве демонстрации возможности осуществления обращения для составляющих тензора момента будет показано, каким образом обращение времени методом наименьших квадратов можно использовать для определения характеристики источника. Будут использоваться наборы синтетических и реальных данных. Синтетические данные формировали совместно с составным механизмом и функции источника оценивали при Sjk=1 и при Sjk, соответствующем истинному тензору момента. На фиг.9 показано изображение волновых сигналов, где остаточные данные ясно видны значительными при использовании постоянного излучения, и функции источников различаются по амплитуде. Простой, но эффективный путь рассмотрения данных заключается в вычислении атрибутов функций источника в предположении Sjk=1. Затем можно предположить механизм действия источника и пересчитать атрибуты. Этот подход будет показан на наборе реальных данных.
Одно из преимуществ обращения времени методом наименьших квадратов заключается в том, что оценивают скалярные амплитудные функции источника, компенсированные за потери при распространении волн. Атрибуты сами могут быть амплитудно-частотными спектрами, на основании которых можно определять угловую частоту и связанные с ними атрибуты момента источника, или спектры источника можно использовать для получения типичной амплитуды или доминирующей частоты источника. Обычно используемым атрибутом является отношение амплитуд волн Sh и Р, хорошо известный диагностический критерий для двухдипольного источника, поскольку имеются нули в излучении P-волны на четырех азимутах. На фиг.10 показана совокупность местоположений реальных событий, определенных в результате эксперимента по гидравлическому разрыву пласта, ориентированному в направлении N77E. Группа приемников контрольной скважины была расположена по направлению к NNW (0, 0).
На левом графике из фиг.10 показаны местоположения событий в зависимости от времени, при этом более темные точки представляют более ранние события и более светлые точки представляют более поздние события. На левом графике показано простирание N77E плоскости трещин, соответствующее функциям источника на правом графике. Кроме того, показаны отношения амплитуд Sh- и P-волн в зависимости от азимута источник-приемник, полученные на основании оцененных функций источника после обращения времени методом наименьших квадратов, при использовании Sjk=1 и использовании Sjk, соответствующего двухдипольному источнику в чистом виде, для случая вертикального простирания N77E плоскости трещин. Для этого механизма действия источника должен быть максимум Sh- и P-волн на N13W, поскольку на этом азимуте имеется нуль в излучении P-волны. Действительно, это наблюдается по темным точкам на правом графике. Более светлыми точками показано отношение Sh- и P-волн, когда предполагается механизм действия двухдипольного источника в чистом виде, по существу с изъятием неверных результатов или компенсацией за влияние диаграммы излучения в рамках процесса обращения времени. Если механизм действия источника корректный, то в этом случае будет двухдипольный источник в чистом виде, и отношения должны быть близки к единице. Хотя более светлыми точками выявляется более плоское простирание, они переспрямлены, что указывает на механизм с большей амплитудой P-волны и, следовательно, на составной механизм действия источника с силами, эквивалентными не двухдипольному источнику.
В прямой модели, описываемой уравнением (1), предполагаются вступления трех прямых волн (P, Sh, Sv), при этом энергия источника распространяется через слоистую поперечно-изотропную среду с вертикальной осью симметрии (часто используют префикс “q”, обозначающий «квази», qP или qSv, подавляемые волны). Большее количество вступлений волн может быть включено в прямую модель, таких как головные волны, образующиеся обменные волны или даже отраженные волны. В дополнение к оперированию с большим количеством вступлений волн в прямой модели можно также использовать большее количество ядер моделирования общего типа. Хотя в представленной реализации используют слоистые поперечно-изотропные модели с вертикальной осью симметрии, более общие модели, содержащие падение и симметрии низшего порядка анизотропии, можно использовать непосредственно.
Формулировка частотной области означает, что локализация точного времени утрачивается. Следовательно, если многократные волны присутствуют в пределах выбранного временного окна и они приходят из различных мест, то их местоположения будут определяться некорректно. Чтобы решить эту проблему, для места нахождения события можно рассмотреть трехмерный апостериорный объем с многочисленными пиками, расположенными выше порога. Используя этот подход, вступления волн без легко идентифицируемых начальных моментов или событий, с трудом группируемые во времени, можно картировать в предположении одинакового механизма действия источника для всех данных во временном окне.
Совместный функционал вероятности данных об амплитудах и взаимном спектре использован в настоящей заявке при нелинейном поиске, но он также может быть преобразован в показатель фокусировки, вычисляемый в пределах трехмерного объема для каждого временного окна данных. Такие трехмерные карты можно рассматривать как кинофрагмент для наблюдения эволюции времени пространственного распределения энергии сейсмических волн.
Дополнительная возможность заключается в построении изображений отражающих границ между найденным местом нахождения излучателя и приемниками. Обращенные функции источника сначала должны использоваться для деконволюции трехкомпонентных остаточных данных, затем необходимо осуществить миграцию этих остаточных данных (в рамках которой отраженные волны должны присутствовать) в их положения, используя калиброванную скоростную модель. Процесс деконволюции трехкомпонентных остаточных данных с обращенными функциями источника будет иметь двойной эффект: 1) удаление времени (t0) начала работы источника, 2) удаление фазы сейсмического импульса источника с тем, чтобы мигрированные изображения могли быть нуль-фазными. Хотя при типичной геометрии мониторинга гидравлического разрыва будет создаваться очень ограниченная зона освещения, события из этапов интерпретации вышележащей зоны должны обеспечивать изображения более глубоких интерпретируемых зон.
Описан основанный на волновых сигналах способ обращения микросейсмических данных. Выполняя действия в частотной области, три функции источника (для P-, Sh-, Sv-волн) или единственную функцию источника и составляющие тензора момента источника оценивают способом, называемым обращением времени методом наименьших квадратов, при этом показатели, влияющие на функцию источника вследствие распространения волн от источника к приемникам, математически обращают посредством инверсии методом наименьших квадратов. Имея оцененные функции источника, осуществляют построение двух целевых функций для количественного определения, насколько хорошо соответствуют волновые сигналы. Одной является обычная χ2-мера, в которой собрана информация, заключенная в приращениях времени пробега волны и поляризациях; другая основана на спектральной когерентности и в ней собрана информация, заключенная в кросс-фазе или разностях времен вступления. Они могут быть объединены в одну функцию правдоподобия и при наличии априорного распределения использованы для построения апостериорной вероятности Байеса. Параметры оптимальной модели обращают, используя данные от источников на предполагаемых известных местах; параметры источников обращают с учетом оптимальной модели. Используют разнообразные стохастические и итерационные поиски.
Вполне закономерно, что способ приведения в соответствие волновых сигналов в вычислительном отношении является более трудоемким, чем основанные на временах вступлений способы, при этом он приблизительно попадает между ними и полной инверсией волновых сигналов. В этом способе пикинг значений времени исключен, вступления Sv-волн включены и использован вектор полной поляризации (не просто азимут). В предложенной реализации алгоритма обрабатываются данные сети произвольно распределенных датчиков и используются слоистые поперечно-изотропные модели с вертикальной осью симметрии, включающие в себя расхождение, потери при распространении волн и Q.
Способы настоящего изобретения применимы в таких областях, как мониторинг гидравлического разрыва пласта, обратное нагнетание отходов, удаление диоксида углерода, постоянный или пассивный мониторинг, вытеснение тяжелой нефти закачиванием пара, наряду с другими, которые известны специалистам в данной области техники. Способы, описанные в настоящей заявке, дают новые и полезные результаты, такие как калиброванные скоростные модели для других применений, таких как определение местоположений событий в реальном времени; инверсии для механизма действия источника или тензора момента; деконволюция и миграция остаточных данных, таких как головные волны, отражения от контрастов импеданса, вступления многократно отраженных волн, использование оцененных функций источника; картирование границ пластов с использованием обнаруженных отражающих горизонтов; картирование трещин.
Способы и системы, описанные выше, могут быть реализованы, например, системой 1460, показанной на фиг.11. Система 1460 может быть размещена относительно первого 1462 и второго 1464 стволов скважин. Первый ствол 1462 скважины пересекает пласт 1466 с зоной 1468, которая запланирована для гидравлического разрыва. Установка 1470 для гидравлического разрыва, содержащая жидкость для гидравлического разрыва, насос и средство управления, связана с первым стволом 1462 скважины. Второй ствол 1464 скважины содержит один или несколько, а в аспектах настоящего изобретения множество, временных или постоянных сейсмических датчиков S. В качестве варианта датчики S могут быть размещены на поверхности 1472 или внутри первого ствола 1462 скважины. Кабель связи, такой как телеметрический кабель 1474, облегчает связь между датчиками S и компьютерной системой 1476 регистрации данных и управления. С началом работы по гидравлическому разрыву жидкость для гидравлического разрыва закачивают в первый ствол 1462 скважины, создавая микросейсмические события 1478, когда зона 1468 растрескивается и распространяется. Микросейсмические события 1478 создают сейсмические волны, которые принимаются детекторами датчиков S.
Микросейсмические волновые сигналы, принимаемые датчиками S, могут использоваться для обнаружения и определения местоположений микросейсмических событий, вызванных операцией разрыва. В соответствии с этим на основании принимаемых микросейсмических волновых сигналов компьютеры, такие как компьютерная система 1476 регистрации данных и управления, могут выполнять программы, содержащие инструкции, при выполнении которых осуществляются способы согласно принципам, описанным в настоящей заявке. Кроме того, способы, описанные в настоящей заявке, могут быть полностью автоматизированными и могут работать непрерывно во времени для мониторинга, обнаружения и определения местоположений микросейсмических событий. Оператор 1479 может принимать результаты способов, описанных выше, в реальном времени, поскольку они воспроизводятся на мониторе 1480. Оператор 1479, в свою очередь, может, например, регулировать параметры гидравлического разрыва, такие как давление нагнетания, концентрации жидкости для воздействия на пласт и проппант, чтобы оптимизировать возбуждение скважины на основании отображаемой информации, относящейся к обнаруженным и локализованным микросейсмическим событиям.
Варианты осуществления были выбраны и описаны, чтобы наилучшим образом пояснить принципы изобретения и его практические применения. Предшествующее описание предназначено для обеспечения возможности другим специалистам в данной области техники наилучшего использования изобретения в различных осуществлениях и с различными модификациями, которые являются пригодными для конкретных предполагаемых применений. Предполагается, что объем изобретения будет определяться нижеследующей формулой изобретения.
Изобретение относится к области геофизики и может быть использовано при исследовании подземных пластов. Заявлены способ и система для обработки микросейсмических волновых сигналов. Изобретением обеспечивается определение меры соответствия волновых сигналов в частотной области, содержащее построение в частотной области по меньшей мере одного функционала несоответствия амплитуд и кросс-фазного функционала между вступлениями. По найденным параметрам осуществляют оценку параметров источника и/или параметров модели с последующим их отображением. Технический результат: повышение точности данных зондирования. 3 н. и 28 з.п. ф-лы, 12 ил.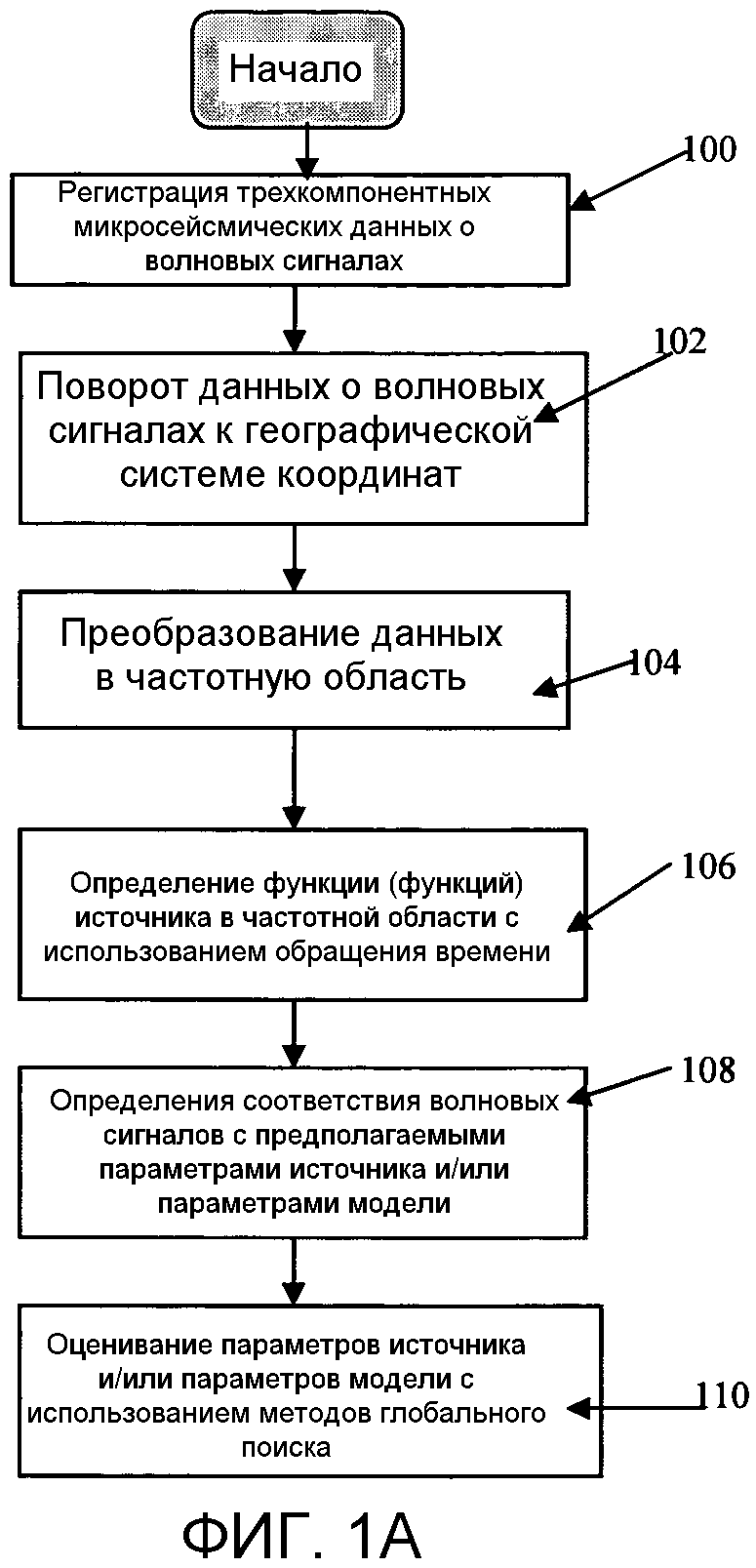
1. Способ обработки микросейсмических данных, содержащий этапы, на которых регистрируют трехкомпонентные микросейсмические данные волновых сигналов, определяют меру соответствия волновых сигналов в частотной области посредством построения в частотной области по меньшей мере одного функционала несоответствия амплитуд и кросс-фазного функционала между вступлениями и оценивают параметры источника и/или параметры модели, отображают результаты микросейсмичности с использованием оцененных параметров источника /или параметров модели.
2. Способ обработки микросейсмических данных по п.1, в котором построение функционала несоответствия амплитуд содержит определение одной или нескольких функций источника в частотной области с использованием обращения времени.
3. Способ обработки микросейсмических данных по п.2, в котором обращение времени содержит обращение времени методом наименьших квадратов.
4. Способ обработки микросейсмических данных по п.2, в котором определение одной или нескольких функций источника содержит определение одной или нескольких из (1) одной функции источника для Р-волны и двух функций источника для S-волны, (2) одной функции источника и по меньшей мере одной составляющей тензора момента источника и (3) функций источника для каждой составляющей тензора момента источника.
5. Способ обработки микросейсмических данных по п.2, в котором определение одной или нескольких функций источника в частотной области с использованием обращения времени содержит использование анизотропной скоростной модели с неупругим поглощением (Q).
6. Способ обработки микросейсмических данных по п.1, в котором построение кросс-фазного функционала между вступлениями содержит построение функционала спектральной когерентности, усредненного по частоте.
7. Способ обработки микросейсмических данных по п.1, в котором дополнительно поворачивают данные о волновых сигналах к географической системе координат Восток, Север, Верх (ENU).
8. Способ обработки микросейсмических данных по п.1, в котором микросейсмические данные о волновых сигналах регистрируют множеством трехкомпонентных геофонов.
9. Способ обработки микросейсмических данных по п.1, дополнительно содержащий совместную χ2-функцию правдоподобия, содержащую функционал несоответствия амплитуд и кросс-фазный функционал с многомерным априорным распределением вероятности; и максимизируют или выбирают функцию апостериорной вероятности, используя методы глобального поиска.
10. Способ обработки микросейсмических данных по п.1, в котором микросейсмические данные о волновых сигналах регистрируют во время операции гидравлического разрыва.
11. Способ обработки микросейсмических данных по п.1, в котором микросейсмические данные о волновых сигналах регистрируют во время операции перфорирования.
12. Способ обработки микросейсмических данных по п.1, в котором дополнительно определяют одну или несколько функций источника в частотной области, используя:

где d - данные о волновых сигналах, регистрируемые множеством трехкомпонентных геофонов на местах х;
ω - угловая частота;
k представляет волны трех различных типов (Р, Sv, Sh);
j - индекс приемника;
uk(ω) - функция перемещения источника для волны k-го типа;
Skj - амплитуда излучения источника;
Tkj - суммарные потери при распространении волны по лучу;
Gkj - геометрическое расхождение;
tkj - время вступления;
Qkj - взвешенное по времени среднее гармоническое значений (изотропного) Q вдоль луча;
fr - опорная частота для моделирования поглощения, обусловленного Q, частота, на которой нет дисперсии фазы; и
hkj - вектор поляризации на приемнике.
13. Способ обработки микросейсмических данных по п.1, в котором функционал несоответствия амплитуд представляет собой:
где d - данные, регистрируемые сетью трехкомпонентных геофонов;
 - данные, формируемые с использованием оцененных функций uk(ω) источника;
- данные, формируемые с использованием оцененных функций uk(ω) источника;
ω - угловая частота;
Nω - количество частот; и
14. Способ обработки микросейсмических данных по п.1, в котором кросс-фазный функционал между вступлениями представляет собой
где SNR - отношение сигнал/помеха;

р представляет фазу.
15. Способ обработки микросейсмических данных по п.1, в котором дополнительно образуют совместную функцию апостериорной вероятности вектора m модели, используя

где d - данные о волновых сигналах, регистрируемые множеством трехкомпонентных геофонов на местах х;
I - априорная информация о распределении модели;
где µ - ожидаемое значение;
σ - стандартное отклонение.
16. Способ обработки микросейсмических данных по п.1, дополнительно содержащий этап формирования изображений отражающих границ между местом нахождения источника и приемниками, на котором определяют одну или несколько функций источника в частотной области, используя обращение времени, осуществляют деконволюцию трехкомпонентных остаточных данных и осуществляют миграцию восстановленных из свертки остаточных данных, используя калиброванную скоростную модель для получения местоположений отражающих границ.
17. Способ обработки микросейсмических данных по п.1, в котором дополнительно калибруют скоростную модель, используя абсолютные времена вступлений, регистрируемые от взрыва при перфорировании.
18. Способ обработки микросейсмических данных по п.1, в котором дополнительно определяют совместную χ2-функцию правдоподобия на протяжении трехмерной (3D) карты для каждого временного окна данных, при этом χ2-функция правдоподобия содержит функционал несоответствия амплитуд и кросс-фазный функционал с многомерным априорным распределением вероятностей, максимизируют или выбирают функцию апостериорной вероятности, используя методы глобального поиска для каждого временного окна данных, и показывают трехмерную карту в виде кинофрагмента эволюции времени пространственного распределения когерентной, обращенной во времени сейсмической энергии.
19. Способ получения параметров модели и источника на основании микросейсмических волновых сигналов, содержащий этапы, на которых регистрируют трехкомпонентные микросейсмические волновые сигналы,
определяют меру соответствия волновых сигналов в частотной области посредством построения в частотной области по меньшей мере одного функционала несоответствия амплитуд и кросс-фазного функционала между вступлениями и оценивают местоположение источника, механизм действия источника и/или атрибуты источника, отображают результаты микросейсмичности с использованием оцененных параметров источника /или параметров модели.
20. Способ получения параметров модели и источника на основании микросейсмических волновых сигналов по п.19, в котором местоположение источника содержит триплет (х, y, z) для каждого события.
21. Способ получения параметров модели и источника на основании микросейсмических волновых сигналов по п.19, в котором механизм действия источника содержит: один или несколько параметров модели, параметры анизотропии, гладкость модели, наклон модели, масштабирование скорости и неупругое поглощение (Q).
22. Способ получения параметров модели и источника на основании микросейсмических волновых сигналов по п.21, в котором зависящие от глубины параметры анизотропии поступают из акустических измерений, при этом они задаются акустическими измерениями или задаются любым представителем меры объема глины.
23. Способ получения параметров модели и источника на основании микросейсмических волновых сигналов по п.21, в котором неупругое поглощение (Q) содержит одну или несколько Qp, Qs1 и Qs2, где S1 и S2 однозначно связаны с Sv-волной и Sh-волной в поперечно-изотропной среде.
24. Способ получения параметров модели и источника на основании микросейсмических волновых сигналов по п.19, в котором атрибуты источника содержат одно или несколько из амплитуды, доминирующей частоты, угловой частоты и скалярного момента.
25. Способ получения параметров модели и источника на основании микросейсмических волновых сигналов по п.24, в котором амплитуда включает в себя отношение амплитуды Sh-волны к амплитуде Р-волны.
26. Система для обработки микросейсмических данных, содержащая:
акустический прибор, содержащий по меньшей мере один трехкомпонентный геофон, установленный на нем, компьютер в связи с акустическим прибором и набор инструкций, выполняемых компьютером, при выполнении которых регистрируются трехкомпонентные микросейсмические данные о волновых сигналах, определяется мера соответствия волновых сигналов в частотной области, при этом производят построение в частотной области по меньшей мере одного функционала несоответствия амплитуд и кросс-фазного функционала между вступлениями, и оценивают параметры источника и/или параметры модели, отображают результаты микросейсмичности с использованием оцененных параметров источника /или параметров модели.
27. Система для обработки микросейсмических данных по п.26, в которой по меньшей мере один трехкомпонентный геофон содержит множество трехкомпонентных геофонов.
28. Система для обработки микросейсмических данных по п.26, где система выполнена или предназначена для операций гидравлического разрыва.
29. Система для обработки микросейсмических данных по п.26, где система выполнена или предназначена для операций перфорирования.
30. Система для обработки микросейсмических данных по п.26, где система выполнена или предназначена для операций постоянного или пассивного мониторинга.
31. Система для обработки микросейсмических данных по п.26, где система выполнена или предназначена для межскважинных операций.
| ИЗОЛИРУЮЩИЙ СТЫК | 2009 |
|
RU2409722C1 |
| СПОСОБ УДАЛЕНИЯ И ВОЗВРАЩЕНИЯ В ИСХОДНОЕ ПОЛОЖЕНИЕ ТРАВЯНОГО ПОКРЫТИЯ ФУТБОЛЬНОЙ ПЛОЩАДКИ КРЫТОГО СТАДИОНА | 2009 |
|
RU2409723C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 5372038 A, 13.12.1994 | |||
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1552324A1 |
| СПОСОБ МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИСТОЧНИКОВ ЭМИССИИ И РАССЕЯННОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278401C1 |

