Ссылка на предшествующую заявку
Данная заявка связана с американской патентной заявкой №10/414,440, содержание которой полностью включено в данную заявку посредством ссылки.
Уровень техники
Существуют оптические системы, предназначенные для точного измерения расстояний. Одним примером системы традиционного типа является узкополосная система для измерения расстояний. Эта система испускает один или более модулированных оптических сигналов, которые дают отражения от встречающейся на пути цели. Система принимает указанные отражения и определяет расстояние до цели по фазовым сдвигам, обнаруживаемым в принятых отражениях. Эти системы обычно нуждаются в использовании дорогого высокоточного приемника, такого как фотодиод с лавинным усилением. Кроме того, работа этих систем может ухудшаться с уменьшением отношения сигнал/шум. Это может быть существенным недостатком, поскольку условия внешней среды в рабочей области могут приводить к значительному ослаблению сигнала.
Другой системой традиционного типа является широкополосная импульсная оптическая система. Эта система также испускает один или более оптических сигналов, которые дают отражения от встречающейся на их пути цели. Система улавливает отражения и измеряет задержку отраженного сигнала, чтобы получить расстояние до цели. Система определяет интервал времени между моментом испускания сигнального импульса системой и моментом получения системой отражения этого импульса. Традиционные системы распознают отправление и прибытие импульса через пороговое детектирование, т.е. сравнение сигналов с уровнем порога. Примером типичного метода является детектирование по уровню половины от максимального значения, которое устанавливает эталонный порог на основе максимальной интенсивности сигнальных импульсов. К сожалению, этот метод плохо работает в режимах с малым отношением сигнал/шум. Системе свойственны трудности в установлении постоянной точки детектирования, поскольку малое отношение сигнал/шум увеличивает ошибки оценок в измерении амплитуды сигнала. Трудности возникают также при попытке измерения времени задержки между сигнальными импульсами. При использовании асинхронных часов для измерения интервала времени между импульсами могут возникать существенные погрешности, если только в системе не используются интервалы измерения с непрактично большой продолжительностью. Чтобы избежать таких интервалов измерения, в системе могут использоваться дорогостоящие быстродействующие компоненты с существенным потреблением энергии.
Находящаяся на рассмотрении американская патентная заявка №10/414,440, поданная заявителем настоящего изобретения 15.04.2003, описывает несколько вариантов устройства для измерения расстояния по времени пролета. Устройство испускает луч, который отражается от поверхности объекта. Измерительное устройство принимает возвращающийся луч и определяет расстояние до объекта по времени пролета луча от посылки до приема измерительным устройством.
Один вариант устройства измерения увеличивает точность за счет вывода опорных импульсов обратной связи из импульсов исходящего луча и ввода их в приемный тракт устройства. Это создает огибающую приемной волны, которая содержит один или более опорных импульсов обратной связи в испускаемом луче и соответствующие отраженные импульсы в возвращающемся луче, что позволяет измерительному устройству непосредственно измерять время задержки между возвращенным импульсом и опорным импульсом, который привел к появлению возвращенного импульса.
Множество проблем возникает в оптических системах для измерения дальности при сокращении измеряемой дальности. Для луча, который находится в поле зрения приемника, имеется соотношение 1/R2 между интенсивностью отраженного сигнала и расстоянием (где R есть расстояние отраженного луча от детектора). Чтобы получить измерения на коротких расстояниях, требуется большой динамический диапазон в отраженном луче. Это вносит усложнения в детектирование сигнала и в цепи обработки. В системах с раздельными передающей и приемной апертурами уменьшение измеряемого расстояния, в конце концов, приводит к снижению интенсивности отраженного сигнала на детекторе. Это снижение сигнала происходит, когда принимаемый сигнал сдвигается с активной поверхности детектора. В системах для измерения расстояния по времени пролета, требующих широкополосного детектирования, большой детектор недопустим. Это значит, что должны быть предусмотрены другие методы для предотвращения потери сигнала на коротких расстояниях. В измерителях расстояния по времени пролета, в состав которых входят импульсные лазерные диоды, подобные описанным в указанной выше американской заявке, часто наблюдается зависимость поведения отраженного сигнала во времени от распределения отраженного сигнала по поверхности детектора. Если только часть отраженного сигнала попадает на детектор, что характерно для измерения расстояний, то могут возникнуть изменения в форме импульса.
Положения данного изобретения могут быть реализованы с использованием аппаратных средств, программного обеспечения или комбинации аппаратных средств и программного обеспечения. Программное обеспечение, используемое для данного изобретения, хранится на одной или более считываемых процессором запоминающих средах, в число которых входят жесткие диски, компакт-диски, DVD-диски, оптические диски, гибкие диски, ленточные накопители, запоминающие устройства со случайным доступом к информации, запоминающие устройства только для считывания или другие подходящие запоминающие устройства. В альтернативных вариантах программное обеспечение может быть полностью или частично заменено специализированными аппаратными средствами, в состав которых входят интегральные схемы, массивы вентилей, программируемые логические интегральные схемы, персональные устройства для определения местоположения и специализированные компьютеры. В одном варианте программное обеспечение, реализующее данное изобретение, используется для программирования одного или более процессоров. Процессоры могут обмениваться информацией с одним или более запоминающими устройствами, периферийной аппаратурой и/или с устройствами сопряжения с системой связи.
Раскрытие изобретения
В одном варианте изобретение содержит устройство для измерения расстояний. Устройство содержит источник света, адаптированный для создания исходящего опорного луча; детектор, ориентированный для приема возвращающегося луча, причем указанный возвращающийся луч возникает при отражении исходящего опорного луча на объекте снаружи указанного устройства измерения расстояний, и диффузор, размещенный вблизи детектора, ориентированного для приема возвращающегося луча.
В другом варианте изобретение представляет собой устройство для измерения расстояний. Данное устройство содержит источник света, адаптированный для создания луча, и светоделительную пластину, установленную на пути указанного луча и создающую внутренний опорный луч. Детектор ориентируется так, чтобы принимать опорный луч обратной связи и возвращающийся луч. Возвращающийся луч возникает при отражении исходящего опорного луча на объекте снаружи указанного устройства измерения расстояний, а исходящий опорный луч извлекается из указанного луча. Вблизи детектора, ориентированного для принятия указанного возвращающегося луча, размещен диффузор.
Положение возвращающегося луча зависит от расстояния до объекта, а диффузор устанавливается для приема возвращающегося луча, когда указанное расстояние находится в интервале от 0,2 до 5 метров.
Данный раздел служит для введения набора понятий в упрощенной форме, которые детализируются в следующем разделе, и не предназначен ни для выявления ключевых или существенных признаков настоящего изобретения, ни для помощи в определении объема заявляемого изобретения.
Краткое описание чертежей
На фиг.1 показано устройство для измерения расстояний в соответствии с данным изобретением.
На фиг.2 показана блок-схема варианта устройства для измерения расстояний в соответствии с данным изобретением.
На фиг.3 показан график зависимости отраженного сигнала на детекторе от расстояния до отражающего объекта.
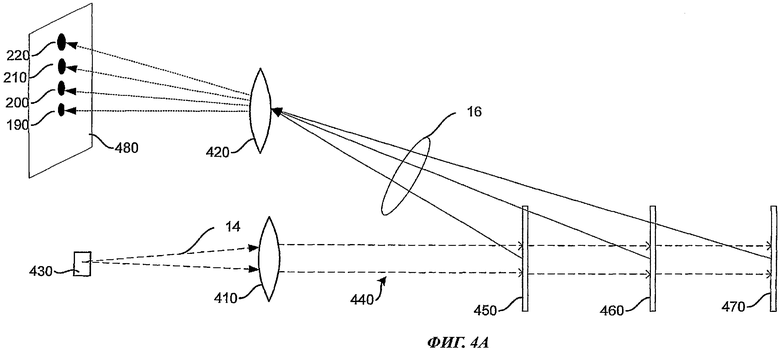
На фиг.4A представлен пучок отраженных лучей, попадающих на мишень при различных расстояниях до отражающего объекта.
На фиг.4B представлен пучок исходящих лучей на каждом отражающем объекте.
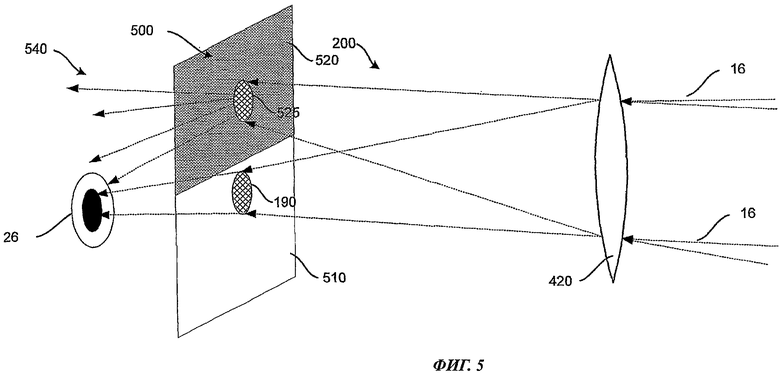
На фиг.5 показана идеальная оптическая система в соответствии с данным изобретением.
На фиг.6 представлена блок-схема варианта устройства для измерения расстояния.
На фиг.7 в перспективном изображении показан детектор, построенный в соответствии с данным изобретением.
На фиг.8 детектор на фиг.7 представлен на виде сбоку, в частичном разрезе.
На фиг.9 детектор на фиг.7 показан на виде сверху.
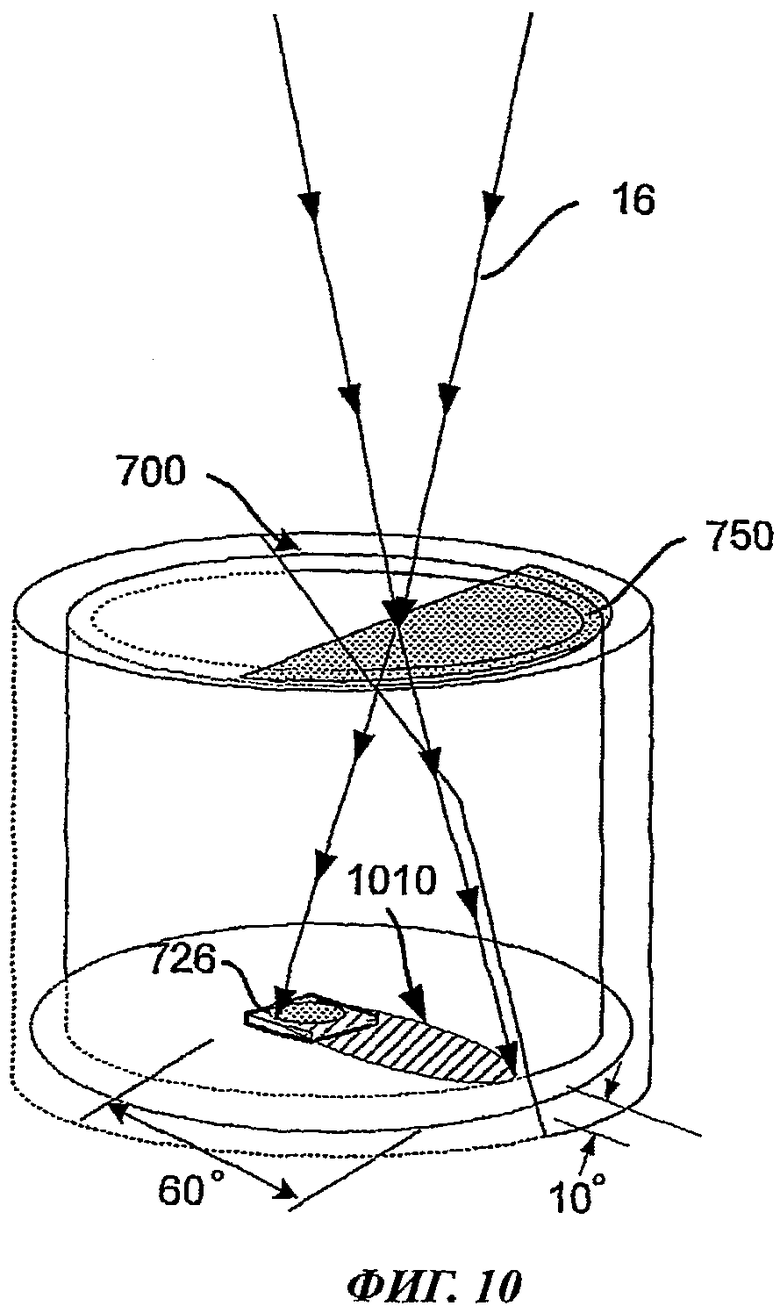
На фиг.10 в перспективном изображении показана часть структуры детектора на фиг.7, иллюстрирующая дифракционные характеристики детектора.
На фиг.11 представлен график зависимости отраженного сигнала на детекторе от расстояния до отражающего объекта в устройстве, реализующем данное изобретение.
На фиг.12 на виде сбоку в сечении показан альтернативный вариант детектора.
На фиг.13 детектор на фиг.12 показан с пространственным разделением его компонентов.
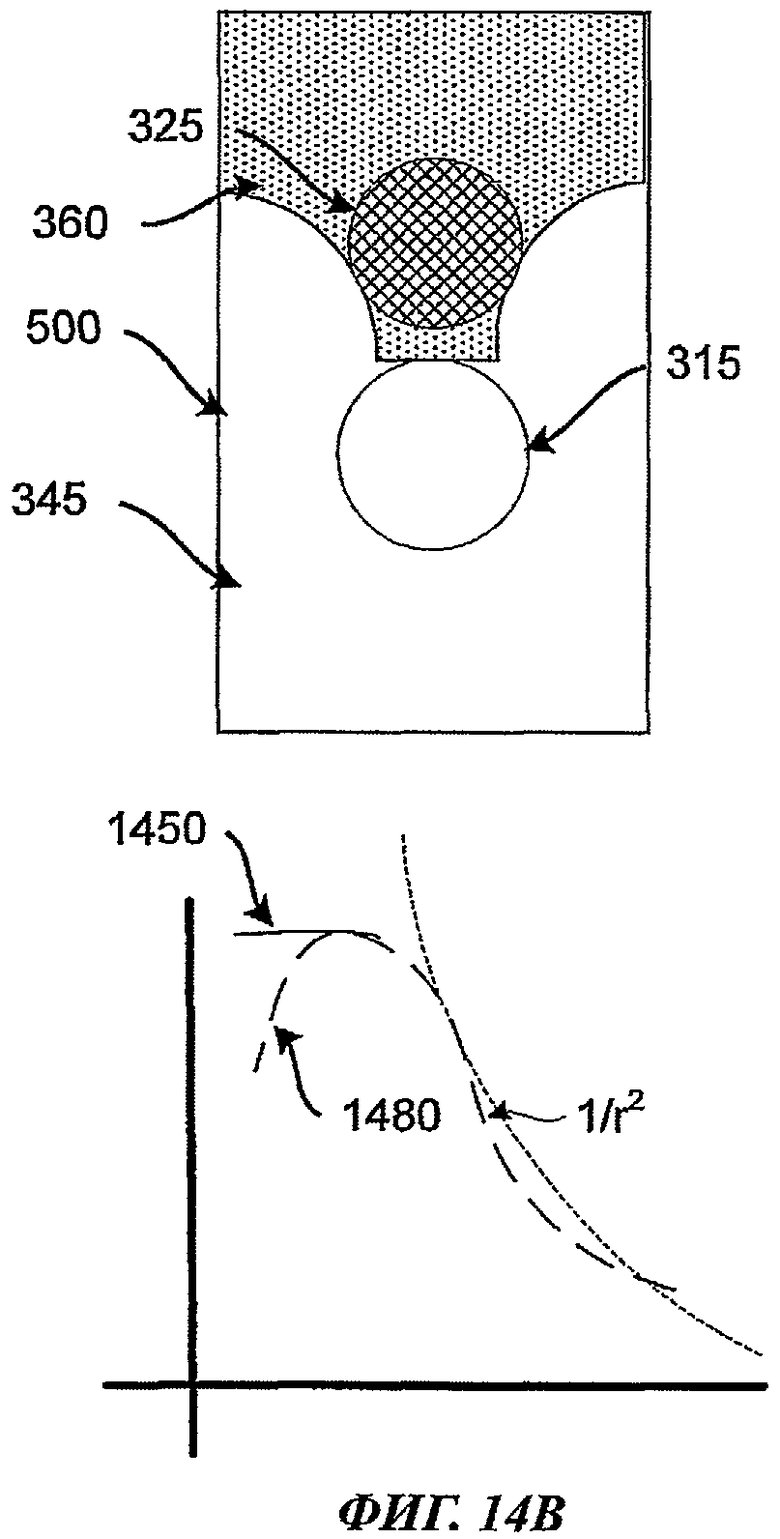
На фиг.14A-14C в поперечном сечении показаны различные дифракционные структуры в соответствии с пояснениями в тексте заявки.
На фиг.15A-15C показан эффект смещения детектора относительно дифракционной решетки в соответствии с настоящим изобретением.
Осуществление изобретения
На фиг.1 представлено устройство 10 для измерения расстояний. Данное устройство может быть осуществлено в соответствии с пояснениями, приводимыми в данном описании, а также в вышеупомянутой американской заявке №10/414,440, содержание которой полностью включено в данное описание посредством ссылки.
Устройство 10 для измерения расстояний способно измерять расстояние от устройства 10 до объекта 12. В одном варианте реализации устройство 10 для измерения расстояний может измерять расстояния от 30 м до 2 мм. В альтернативных реализациях возможны различные интервалы значений измеряемых расстояний. Один вариант устройства 10 для измерения расстояний измеряет расстояния с точностью до 2 мм.
Устройство 10 для измерения расстояний испускает луч 14, который отражается от поверхности объекта 12. Отражение луча 14 возвращается к измерительному устройству 10 как луч 16. Измерительное устройство 10 определяет расстояние до объекта 12 по времени задержки между испусканием луча 14 и приемом луча 16. В альтернативных вариантах устройство 10 для измерения расстояний имеет общую точку выхода и входа для лучей 14 и 16 соответственно. Это может быть особенно полезным для измерений на коротких расстояниях.
Устройство 10 для измерения расстояний в некоторых вариантах обеспечивает высокую точность измерений без обязательного использования дорогих высокоточных компонентов. Это приводит к снижению себестоимости устройства 10. Устройство 10 для измерения расстояний увеличивает точность за счет использования цепи обратной связи для ввода опорных импульсов - один или более опорных импульсов из луча 14 вводятся в приемный тракт, который улавливает луч 16. Это создает огибающую принимаемого сигнала с участием опорного и возвращенного импульсов. Устройство 10 использует эту огибающую сигнала для согласования точек на возвращенных импульсах в луче 16 с точками опорных импульсов в луче 14, которые служили источниками для точек возвращенных импульсов. Устройство 10 измеряет расстояние между соответствующими точками, чтобы определить время пролета для испущенного сигнала, и преобразует время пролета в единицы расстояния.
В одном варианте устройство 10 для измерения расстояний ослабляет импульсы из луча 14 в цепи обратной связи. Это приводит к тому, что время нарастания и спада опорного импульса будет таким же или очень похожим на время нарастания и спада отраженных импульсов в луче 16. Тем самым повышается возможность устройства 10 точно согласовать точки возвращенного импульса с точками опорного импульса при определении времени пролета.
В одном варианте устройства 10 для измерения расстояний используется модуль обработки гистограмм для оцифровки огибающих опорного и возвращенного импульсов. Этот модуль обработки гистограмм делает выборки значений огибающих на изменяющихся порогах сравнения. Модуль обработки гистограмм использует наиболее точную информацию на каждом пороге для создания оцифрованной ступенчатой огибающей, которая соответствует аналоговой огибающей, получаемой устройством 10 для измерения расстояний. Модуль обработки гистограмм облегчает использование устройства 10 в условиях малых отношений сигнал/шум.
В некоторых вариантах устройство 10 для измерения расстояний содержит также модуль обработки цифрового сигнала, который обрабатывает оцифрованную ступенчатую огибающую. Обработка позволяет лучше согласовать точки на возвращенных импульсах с соответствующими точками опорных импульсов для точного измерения времени задержки. В одном варианте цифровая обработка сигнала устраняет шум, масштабирует опорные импульсы и устраняет искажения, вызванные взаимным наложением фронта и спада соседних импульсов.
На фиг.2 показана блок-схема одного из вариантов устройства 10 для измерения расстояний. Устройство 10 для измерения расстояний содержит формирователь 52 тока, подсоединенный к источнику 50 света. В одном варианте источником 50 света является лазерный источник, такой как лазерный диод, который дает невидимый инфракрасный сигнал. В другом варианте источником 50 света является полупроводниковый лазер с вертикальным резонатором (VCSEL) или другой тип лазерного диода. В одном из вариантов с целью снижения себестоимости источник 50 света может также быть светодиодом. Формирователь 52 тока управляет лазерным источником 50 для получения лазерного луча 46. В других вариантах источник 50 света может создавать свет, отличный от невидимого лазерного света. Формирователь 52 тока обладает способностью подавать на источник 50 света либо одиночный дифференциальный импульс, либо пакет дифференциальных импульсов. В ответ источник 50 света выдает либо один импульс, либо пакет импульсов в луче 46.
Собирающая линза 48 располагается относительно источника 50 света так, чтобы захватить луч 46 и направить его на светоделительную пластину 44, у которой одна поверхность является частично отражающей и частично пропускающей. Светоделительная пластина 44 делит луч 46 на исходящий опорный луч 14 и внутренний опорный луч 42. Окно 56 устанавливается относительно светоделительной пластины 44 так, чтобы захватить луч 14 и вывести его из устройства 10. В одном из вариантов осуществления устройство 10 содержит лазерный источник 43, который дает видимый лазерный луч 45. В этом варианте осуществления светоделительная пластина 44 является дихроичным зеркалом, на которое падает луч 45 и которое отражает луч 45 для вывода через окно 56. Выходящий видимый луч позволяет пользователям направить устройство 10 на цель 12. Дихроичное зеркало пропускает большую часть падающего инфракрасного луча 46, отражая малую часть инфракрасного луча 46 для получения луча 42. Дихроичное зеркало также отражает практически весь видимый луч 45. Светоделительная пластина 44 устанавливается так, чтобы луч 14 и часть луча 45, отраженная этой пластиной 44, были соосными.
Аттенюатор 32 устанавливается относительно светоделительной пластины 44 так, чтобы на него попадал внутренний опорный луч 42. Аттенюатор 32 ослабляет интенсивность луча 42, чтобы получить опорный луч 40 обратной связи. Отражатель 34 устанавливается относительно аттенюатора 32 так, чтобы получить опорный луч 40 обратной связи. Опорный луч 40 обратной связи падает на поверхность отражателя 34 и отражается. В одном варианте отражатель 34 является зеркалом. Альтернативно отражатель 34 может быть осуществлен другими средствами. В других вариантах аттенюатор 32 не применяется, а внутренний опорный луч 42 направляется на отражатель 34. Собирающая линза 30 устанавливается относительно отражателя 34 так, чтобы получить отраженный опорный луч 40 обратной связи. Возвращающийся луч 16 входит в устройство 10 через окно 36. Возвращающийся луч 16 проходит через отражатель 34 и фокусируется линзой 30. В одном варианте устройство 10 содержит фильтр (не показан), который ставится на пути луча 16 перед линзой 30 и отфильтровывает окружающий свет. В альтернативном варианте никакой фильтр не используется. Еще в одном варианте отражатель 34 является частично прозрачной светоделительной пластиной, на которую падает луч 16 и которая направляет луч 16 на линзу 30.
Опорные импульсы обратной связи в луче 40 и возвращенные импульсы в луче 16 появляются в огибающей, которая попадает на детектор 26. В одном варианте детектором 26 является кремниевый фотодиод, анод которого заземлен, а катод соединен с входом предусилителя 24. Детектор 26 детектирует сигналы, поступающие через линзу 30. Предусилитель 24 получает выходной сигнал с детектора (лазерного диода) 26 и усиливает огибающую входного сигнала. Выход предусилителя 24 подключен к входу компаратора 22, управляемый вход 25 которого подключен к блоку 20 управления. Блок 20 управления устанавливает пороговое напряжение на управляемом входе 25 компаратора. Компаратор 22 сравнивает огибающую с выхода предусилителя 24 с пороговым напряжением. Когда огибающая превышает пороговое значение на управляемом входе 25, компаратор 22 выдает сигнал логической 1. В противном случае компаратор 22 выдает сигнал логического 0.
Блок 20 управления соединен с выходом компаратора 22, управляемым входом 25, входом формирователя 52 тока и управляемым входом аттенюатора 32. Блок 20 управления управляет работой формирователя 52 тока, задавая амплитуду, продолжительность, интенсивность и число импульсных сигналов, используемых для формирования выходных импульсов источника 50. Блок 20 управления устанавливает уровень ослабления, которое аттенюатор 32 вносит в опорный луч 42. В одном варианте оптический аттенюатор 32 представляет собой аттенюатор с электронным управлением, например устройство, содержащее жидкокристаллический затвор. Аттенюатор 32 электронным способом устанавливает ослабление в соответствии с управляющими сигналами, поступающими с блока 20 управления. В альтернативных вариантах аттенюатор 32 механически устанавливает ослабление в ответ на сигналы с блока 20 управления. В одном варианте аттенюатор управляет работой механического исполнительного механизма, который устанавливает величину раскрытия механического затвора. В альтернативных вариантах для управления работой аттенюатора 32 могут быть использованы и другие средства.
Блок 20 управления переводит оптический аттенюатор 32 в такое состояние, что интенсивность импульсов на опорном луче 40 обратной связи близка или равна интенсивности импульсов на возвращающемся луче 16. Согласованная интенсивность позволяет опорным импульсам и возвращающимся импульсам иметь сходные или одинаковые времена нарастания и спада на их фронтах и спадах. Это дает возможность опорным и возвращающимся импульсам подвергаться одинаковой задержке при прохождении через предусилитель 24 и компаратор 22, что позволяет легко согласовать соответствующие точки на опорном и возвращенном импульсах при определении времени пролета.
Блок 20 управления использует сигналы с компаратора 22 для построения цифровых версий огибающих, получаемых детектором 26. В одном варианте блок 20 управления содержит модуль обработки гистограмм. Модуль обработки гистограмм собирает многочисленные выборки из огибающей на различных интервалах в пределах огибающей. Модуль обработки гистограмм собирает эти данные для различных значений порога сравнения на управляемом входе 25 компаратора. Для каждого значения порога сравнения модуль обработки гистограмм собирает выборки из многочисленных огибающих, содержащих опорные и возвращенные импульсы.
Модуль обработки гистограмм накапливает замеры каждого интервала в огибающей при заданном пороге сравнения. Это приводит к гистограмме для каждого порогового напряжения, подаваемого на управляющий вход 25 компаратора. Каждая гистограмма отображает число состояний логической 1, выданных компаратором 22 в пределах каждого интервала внутри огибающей при заданном пороге сравнения. Блок 20 управления группирует гистограммную информацию на каждом пороге для создания составной огибающей, которая служит цифровой копией огибающей, полученной на детекторе 26 (на лазерном диоде). Блок 20 управления применяет оцифрованную огибающую для выявления опорных импульсов и соответствующих им возвращенных импульсов, чтобы получить измерения времени пролета. Как указано выше, блок 20 управления применяет цифровую обработку информации к оцифрованной огибающей, чтобы точнее измерить время пролета. Более подробно эти операции описаны ниже. В альтернативных вариантах могут применяться различные виды обработки гистограмм.
На фиг.3 показана зависимость интенсивности сигнала на детекторе в возвращающемся луче 16 от расстояния до цели 12. Кривая 300 на фиг.3 показывает типичную зависимость, наблюдаемую в измерительных устройствах для измерения дальности по времени пролета, описанных в различных вариантах вышеупомянутой американской заявки №10/414,440. Кривая 110 показывает идеальную зависимость 1/R2 между расстоянием и интенсивностью сигнала. Линия 120 отмечает переход от этого идеального соотношения к характерному спаду, обусловленному сползанием изображения принимаемого возвращающегося луча 16 с детектора.
Положение линии 120, соответствующей точке перехода от хороших характеристик сигнала к спаду на более коротких расстояниях, зависит от нескольких факторов, среди которых: физическое расстояние между оптическими апертурами, характеристики испускаемого луча, характеристики принимающей линзы, размер и форма детектора и положение детектора. При уменьшении расстояния к точке 130 сигнал может исчезнуть совсем за счет полного смещения принимаемого луча с активной области детектора. Иногда сигнал не исчезает полностью благодаря рассеянию энергии на поверхностях внутри принимающей структуры. Обычно случайное рассеяние энергии в принимаемом луче приводит к неадекватной интенсивности сигнала и к искажению огибающей детектируемого импульса.
На фиг.4A и 4B показаны свойства исходящего и отраженного лучей на различных расстояниях. На фиг.4А показана идеальная оптическая система, состоящая из передающей линзы 410, апертуры 440, источника 430 света и различных целей 450, 460, 470. Далее будут проиллюстрированы и рассмотрены характеристики отраженного луча в плоскости 480 изображений. Лазерный источник 430 света создает энергию, которая собирается и фокусируется передающей линзой 410. Выходящий луч отражается от целей 450, 460 и 470. Эти цели находятся на различных расстояниях от линзы 410.
На фиг.4B проекция поперечного сечения луча на передающей апертуре 410 и при различных положениях цели показана на идеализированной мишени 485, закрашенной окружностью и штриховыми линиями. Закрашенная окружность 245 на фиг.4B показывает поперечное сечение луча на передающей апертуре 410. Окружность 255 ограничивает сечение луча для цели в положении 450, окружность 265 - для цели в положении 460 и окружность 490 - для цели в положении 470. Пунктирная окружность 255 лишь ненамного больше окружности 245 благодаря лишь небольшому вкладу расходимости луча в размер его поперечного сечения. Однако на больших расстояниях размер луча начинает увеличиваться пропорционально расходимости луча, и это условие часто называют поведением луча в дальнем поле.
В фазовых или импульсных оптических устройствах для измерения расстояний с двумя апертурами принимаемый сигнал в плоскости 480 изображений при уменьшении расстояния испытывает как поперечное смещение, так и увеличение в размере. На фиг.4A изображения, формируемые приемной линзой 420, показаны в плоскости 480 изображений. Кружок 190 показывает положение изображения от цели на очень большом расстоянии, где размер изображения определяется размытостью фокусируемого линзой пятна и где поперечное смещение минимально. Изображения, обозначенные как 200, 210 и 220, показывают изменение в размере и в положении для цели в положениях 470, 460 и 450 соответственно. Изображения 210 и 220 смещаются в поперечном направлении и увеличиваются в размере благодаря увеличению угловой расходимости луча на более коротких расстояниях.
Для компенсации поперечного смещения луча устройство согласно изобретению использует диффузор, помещаемый на траектории принимаемого сигнала, чтобы селективно рассеивать энергию на детектор оценивающей расстояние системы при уменьшении расстояния. Это концептуально иллюстрируется фиг.5.
На фиг.5 показано, как принимающая линза 420 формирует пучок лучей, сходящихся на детекторе 26. Пучок лучей может быть частью отраженного луча, показанного на фиг.1. Комбинированная структура 500, состоящая из прозрачной оптической маски и диффузора, помещается на пути луча вблизи детектора. Структура 500 из оптической маски и диффузора содержит оптически прозрачную часть 510 маски и часть 520 с диффузором.
В общем случае принятое изображение на детекторе смещается в поперечном направлении за счет параллакса, траектория отраженного луча 16 перед детектором 26 заходит в рассеивающую область (соответствующую части 520), что заставляет энергию рассеиваться на детектор 26. За счет правильного размещения диффузора и управления углом и распределением рассеиваемой энергии можно управлять интенсивностью принимаемого сигнала при сокращении расстояния. В результате интенсивность сигнала при сокращении расстояния может поддерживаться на приемлемом уровне. Поведение интенсивности сконструированного сигнала снижает требования к динамическому диапазону приемника за счет снижения потерь сигнала, обычно происходящих на коротких расстояниях, с одной стороны, и предотвращения чрезмерно большого уровня сигнала, часто испытываемого при переходе от нормального соотношения 1/R2 к работе на коротких расстояниях, с другой. Рассеянная часть сигнала будет точно отражать изменения в пространственном распределении получаемого изображения, предотвращая ошибки измерения расстояния, обусловленные неполной оценкой пространственного распределения энергии на детекторе. Это рассеяние сигнала с коротких расстояний предотвращает ошибки измерения расстояния, связанные с изменениями в огибающей импульса, когда изображение возвращаемого сигнала смещается с поверхности детектора.
Типичное расстояние между оптической маской и поверхностью детектора составляет от 1 до 2 миллиметров. Оптическая маска может быть помещена около поверхности детектора, чтобы минимизировать размер сходящегося пучка для улучшения пространственной дискриминации с изменением пространственного положения изображения. Имеется также потребность получать представительные выборки для энергии изображения, формируемой за счет рассеяния от поверхности маски. Между оптической маской и поверхностью детектора имеется расстояние, которое может быть правильно рассчитано с учетом характеристики диффузора, желаемой зависимости интенсивности сигнала от расстояния и размера детектора.
Круговое поперечное сечение 190 показывает внутреннее сечение пучка лучей, отраженных от цели на большом расстоянии и проходящих через прозрачную область 510 комбинированной структуры 500 из диффузора и маски. По мере сокращения расстояния пучок лучей смещается вертикально к положению 525 в пределах рассеивающей области 520 с диффузором комбинированной структуры 500. Энергия от пучка, попадающего в область 525, рассеивается областью 520 с образованием рассеянного света 540. Угловое распределение рассеянной энергии может быть осуществлено множеством способов, включая использование дифракционных картин и рассеянных частиц, подвешенных в прозрачной среде, для создания желаемой характеристики отраженного сигнала на заданных расстояниях.
В одном варианте граница между рассеивающей областью 520 и прозрачной областью 510 помещается в непосредственной близости к номинальному поперечному сечению 190 луча. Важно, чтобы пучок лучей был непрерывен в рассеивающей области, если изображение от цели превосходит номинальный размер размытого фокусного пятна линзы. Как только изображение цели превосходит размытое фокусное пятно линзы, пространственное распределение луча от цели будет преобразовано в распределение энергии на плоскости изображений. Когда изображение смещается с активной части детектора за счет параллакса, может возникать неполная оцифровка луча. Это изменит поведение детектируемого сигнала во времени, а поскольку измерение расстояния требует корреляции принимаемого сигнала с предварительно запомненной или измеренной переданной огибающей, переход между нерассеивающей и рассеивающей областями должен происходить на расстоянии, на котором в пространственное распределение изображения цели аберрациями принимающей линзы вносится элемент случайности. Различные варианты рассеивающей области прозрачной маски могут использоваться для формирования зависимости интенсивности сигнала от расстояния, как это обсуждается ниже на примере фиг.14 и фиг.15.
На фиг.6 показано устройство для измерения расстояний, в частности его оптическая часть, пригодная для осуществления настоящего изобретения. На фиг.6 показан пример физической реализации составляющих, схематически показанных на фиг.3.
На фиг.6 показан вариант 600 устройства 10 для измерения расстояний и, в частности, оптическая часть устройства 10. Устройство 600 содержит корпус 605 для размещения оптических и электронных компонентов, который может содержать устройство для измерения расстояний. Печатная плата 610 устанавливается в корпусе и содержит источник 50 света. В одном варианте источником 50 света является лазерный источник, такой как лазерный диод, который дает невидимый инфракрасный сигнал. В другом варианте источником 50 света является полупроводниковый лазер с вертикальным резонатором (VCSEL) или другой тип лазерного диода.
Как указано выше в отношении фиг.2, печатная плата содержит формирователь 52 тока, обладающий способностью выдавать на источник 50 света либо один дифференциальный импульс, либо пакет дифференциальных импульсов. Собирающая линза 48 располагается относительно источника 50 света так, чтобы захватить луч 46 и направить его на светоделительную пластину 44, у которой одна поверхность является частично отражающей и частично пропускающей. Светоделительная пластина 44 делит луч 46 на исходящий опорный луч 14 и внутренний опорный луч 42. Часть луча направляется к зеркалу 55. Окно 56 устанавливается относительно светоделительной пластины 44 так, чтобы захватить луч 14 и вывести его из устройства 10. Аттенюатор 32 устанавливается относительно светоделительной пластины 44 так, чтобы на него попадал внутренний опорный луч 42. Отражатель 34 устанавливается относительно аттенюатора 32 так, чтобы на него попадал опорный луч 40 обратной связи. Опорный луч 40 обратной связи падает на поверхность отражателя 34 и отражается. Собирающая линза 30 устанавливается относительно отражателя 34 так, чтобы на нее попадал отраженный опорный луч 40 обратной связи. Возвращающийся луч 16 входит в устройство 600, проходит через отражатель 34 и фокусируется линзой 30. Опорные импульсы обратной связи в луче 40 и возвращенные импульсы в луче 16 появляются в огибающей, которая поступает на детектор 26.
Как показано на фиг.6, детектор 26 может содержать фотодиод, установленный в детекторную структуру, которая сама монтируется на печатной плате. Из дальнейшего будет понятно, однако, что размещение фотодиода и структуры для установки диода необязательно должно быть на печатной плате и может быть реализовано во многих различных вариантах.
На фиг.7, 8 и 9 показана первая реализация детекторной структуры с применением диффузора. Блок 700 диффузора показан вмонтированным в печатную плату 610. Несмотря на то, что на фиг.7-9 показана одна конструкция, следует понимать, что могут использоваться различные типы монтажных конструкций.
На фиг.7 представлен перспективный вид блока 700 диффузора. На фиг.8 блок 700 диффузора на фиг.7 показан на виде сбоку, в частичном разрезе. На фиг.9 представлен вид сверху блока 700 диффузора.
Блок 700 диффузора содержит штампованный диффузор 750 на поддерживающем диффузор кольце 770, в котором имеется входное окно 730. Детектор 726 установлен на детекторной подставке 736 и подсоединен с помощью электрических проводников 715, 720 к электронике, смонтированной на печатной плате 610. В конфигурации, показанной на фиг.7, 8 и 9, диффузор 750 является штампованным диффузором с полукруглым поперечным сечением (как показано на фиг.9) и с разграничением между прямолинейным краем 755 рассеивающей области и фотодетектором 726, как показано на фиг.9. В одном варианте диффузор имеет толщину T (фиг.8), равную приблизительно 125 мкм. Он расположен над фотодетектором на высоте H, приблизительно равной 2,5 мм, и отделен от центральной линии блока 700 и фотодиода 726 расстоянием D, которое принимает значения между 250 мкм и 500 мкм.
На фиг.10 представлен частичный разрез перспективного вида блока 700 диффузора, поясняющий эффект попадания луча, отраженного на коротком расстоянии, на диффузор 750. В этой реализации диффузор 750 имеет угол рассеяния 10° на 60° и изготовлен из поликарбонатной пленки толщиной 125 микрометров. Такой диффузор, который может быть изготовлен фирмой Physical Optics Corporation, США, обычно называется формирующим свет диффузором. Формирующие свет диффузоры - это голографически записываемые структуры со случайным поверхностным рельефом, которые дают высокую пропускную эффективность и управляемое угловое распределение. Эти полностью рандомизованные структуры не зависят от длины волны. Структуры с точным поверхностным рельефом обеспечивают управляемую угловую расходимость света, имитируя отрицательную линзу. Как показано на фиг.10, угловое распределение диффузора таково, что возвращающийся луч 16, попадающий на диффузор, создаст область изображения 1010, часть которой попадет на фотодиодный детектор 726. Несмотря на то что на фиг.10 показано угловое распределение с углами рассеяния 10° на 60°, диффузор может иметь угловое распределение в интервале от 5° на 30° до 10° на 60°. Интенсивность сигнала, воспринимаемая приемником, может быть улучшена подстройкой характеристики диффузора на основе выбора горизонтального положения на поверхности диффузора. На фиг.11 показан пример поведения диффузора, где угол рассеивания уже ориентирован к детектору вдоль переднего края для увеличения пропускной способности. Когда луч смещается в горизонтальном направлении по поверхности диффузора, угол рассеяния может увеличиваться, чтобы предотвратить избыточное увеличение интенсивности сигнала при сокращении расстояния.
На фиг.11 показан график зависимости интенсивности сигнала от расстояния для детекторной структуры и устройства для измерения расстояний, изготовленного в соответствии с данными, приведенными со ссылками на фиг.7-10. Кривая 1/R2 иллюстрирует идеальное соотношение для принимаемого отраженного сигнала. В точке 1110 происходит спад сигнала, поскольку сигнал смещается с детектора. В точке 1120 сигнал переместился на диффузор, и интенсивность сигнала начинает увеличиваться в точке 1130 до максимального значения в точке 1135. На фиг.3 показан сигнал без диффузора. Как можно видеть из сравнения фиг.11 с фиг.3, различные аспекты характеристики сигнала на коротких расстояниях (менее 10 метров в этом варианте) могут быть управляемыми. Кроме того, характеристика сигнала, показанная на фиг.11, может быть селективно изменена в соответствии с конкретными требованиями изготовляемого устройства для измерения расстояний.
Как показано на фиг.11, интервал расстояний, для которых возвращенный луч рассеивается, составляет приблизительно от 0 до 4 метров.
На фиг.12 и 13 показан альтернативный вариант приемного диффузора. На фиг.12 приемная структура 1200 представлена в сечении, а на фиг.13 приемная структура 1200, соответствующая этому альтернативному варианту, показана с пространственным разделением компонентов. Детектор устанавливается в детекторном стаканчике 1215, внутренние компоненты которого состоят из фотодиодного детектора 726 и детекторной подставки 736, а электрические провода 715 и 720 эквивалентны упомянутым выше. Детекторный стаканчик 1215 имеет прозрачное окно 1230. Стаканчик 1255 для монтажа диффузора имеет ориентирующий паз 1245, соответствующий выступу 1240 на детекторном стаканчике 1215. Прорезанная лазером пластина диффузора 1250 устанавливается на верхнюю часть стаканчика 1255 и может быть сделана из поликарбоната, полиэстера, акрила, прозрачного для ультрафиолета акрила или стекла. Диффузор имеет ориентирующий паз 1258, соответствующий ориентирующему выступу 1260 на стаканчике 1255. Центральное отверстие 1265 позволяет отражениям с больших расстояний проходить непосредственно на детектор 726. Диффузор 1250 имеет форму круга, допускающую любую ориентацию диффузора относительно детекторной структуры 1200 и позволяющую легко устанавливать альтернативные диффузоры, обладающие различными формами и характеристиками рассеивания.
Еще в одном варианте может быть использован монтажный стаканчик увеличенного внутреннего диаметра с дополнительным отверстием для введения эпоксидной смолы в область детектора. Если стаканчик пластиковый, то можно использовать эпоксидную смолу серии UU для надежного крепления диффузора к монтажному стаканчику.
На фиг.14 и 15 показаны различные изменения, которые происходят с характеристиками детекторной структуры, и области рассеяния при изменениях, вносимых в переходную границу между прозрачной областью и диффузором, а также при изменении расстояния между диффузором и детектором 26.
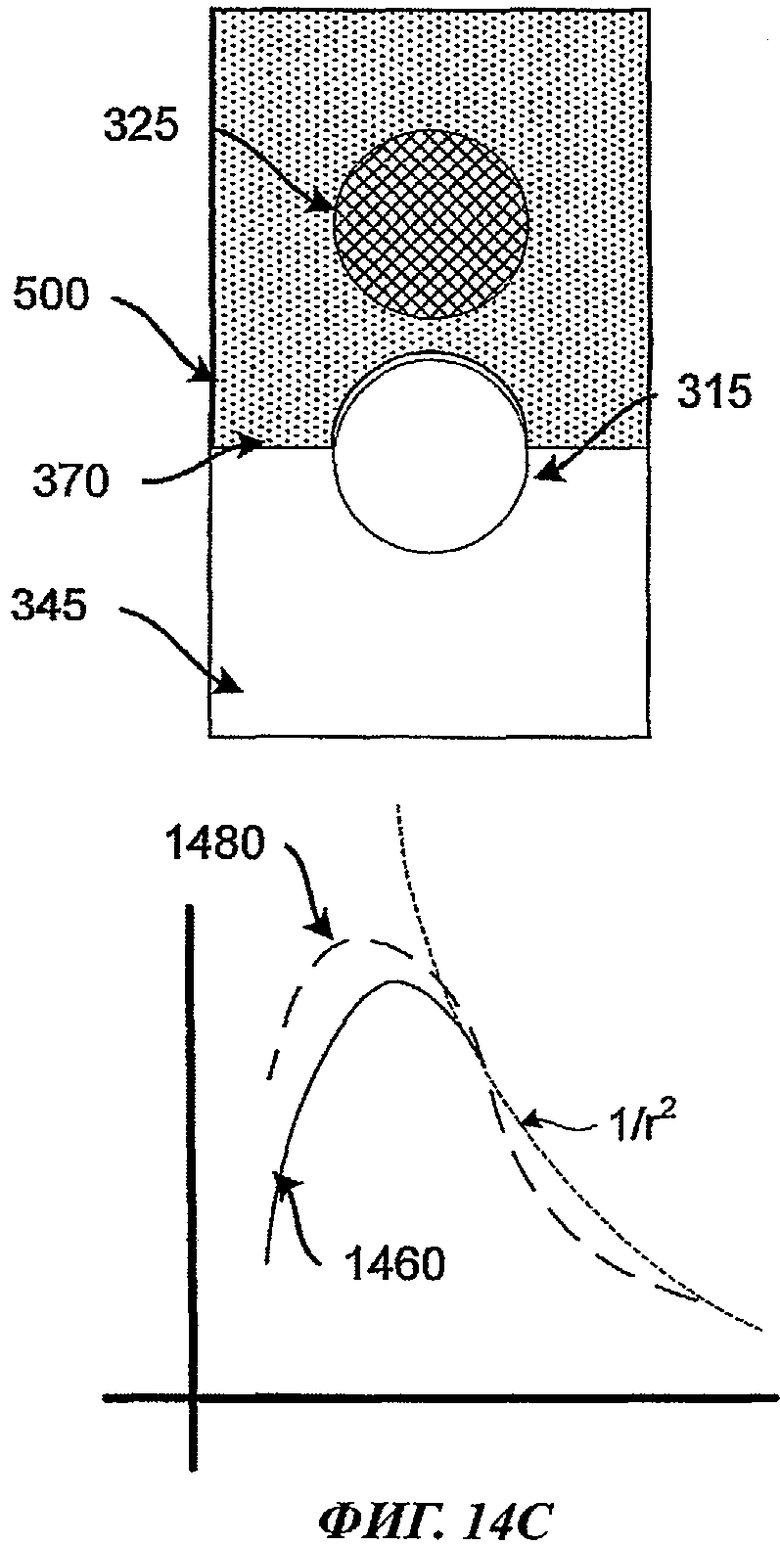
На фиг.14A-14C показан эффект изменения в переходной границе между прозрачной областью 345 и рассеивающей областью 325 с границами 350, 360, 370 в прозрачной оптической маске и структуре 500. Эти чертежи иллюстрируют, как переходная граница может использоваться для управления зависимостью интенсивности сигнала от расстояния в отраженном луче.
На фиг.14A, 14B и 14C показаны три различные конфигурации маски с различными граничными переходами. Граница 350 имеет прямую линию раздела, а ее характеристика показана на чертеже кривой 1480. Показана также теоретическая характеристика 1/R2.
На фиг.14B показана криволинейная граница 360, расположенная ближе к полностью рассеивающей области 325. Криволинейной границей 360, показанной на фиг.14B, может быть создан менее резкий сигнал. Кривая 1450 показывает не столь быстрое убывание интенсивности сигнала с расстоянием по сравнению с исходной кривой 1480.
Более резкий переход может быть достигнут с криволинейной границей противоположного направления, изображенной на фиг.14C линией 370. Кривая 1460 отображает эту более крутую характеристику по сравнению с исходной кривой 1480. Как легко понять, в соответствии с данным изобретением могут использоваться различные схемы.
На фиг.15A-15C показано, как изменение расстояния между оптической маской 1525 и детектором может изменить зависимость интенсивности сигнала от расстояния на коротких расстояниях. На фиг.15A показано первое расстояние D1, разделяющее детектор 26 и прозрачную оптическую маску с рассеивающей структурой. На фиг.15B показано второе расстояние D2, разделяющее прозрачную оптическую маску 1525 с рассеивающей структурой и детектор 26, которое больше, чем D1.
Если разделяющее расстояние D очень мало, больший процент энергии от рассеивающей поверхности может достичь детектора. Кривая 1580 показывает более резкий и более ранний спад с уменьшением расстояния по сравнению с номинальной кривой 300. Минимальный сигнал на коротком расстоянии показан кривой 1585. Большое расстояние между детектором и маской, как показано на фиг.15B, дает меньше рассеянной энергии на детектор из-за малого угла, под которым виден детектор по сравнению с характеристикой углового рассеяния, профилированной в диффузоре. Характеристическая кривая 1595 имеет более пологое изменение интенсивности сигнала с уменьшением расстояния, но в то же время меньшее значение минимальной интенсивности сигнала в области 1590.
Как будет понятно специалистам в данной области, настоящее изобретение допускает много разнообразных вариаций концепции диффузора. При этом изобретение обладает особыми преимуществами при использовании в сочетании с детектором из вышеупомянутой американской заявки №10/414,440. Однако достоинства изобретения реализуются не только при использовании именно этого детектора.
Изложенное выше подробное описание изобретения было приведено в целях иллюстрирования и пояснения изобретения. Оно не должно рассматриваться как исчерпывающее или ограничивающее изобретение только раскрытой формой. Многие модификации и вариации возможны в свете приведенных выше пояснений. Описанные варианты были выбраны для наилучшего объяснения принципов изобретения и его практического приложения, чтобы дать возможность другим специалистам лучше использовать изобретение в различных вариантах и модификациях, соответствующих ожидаемому конкретному использованию. Подразумевается, что область действия изобретения определяется приводимой ниже формулой изобретения.
Хотя изобретение было описано применительно к конкретным конструктивным деталям и/или методологическим операциям, следует понимать, что предмет изобретения, определенный в прилагаемой формуле, необязательно ограничивается конкретными характеристиками или операциями, описанными выше. 5 Скорее, конкретные характеристики и операции, описанные выше, приводятся только в качестве примеров реализации пунктов формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ НИМ И ЦЕЛЕВЫМ ОБЪЕКТОМ С ПОМОЩЬЮ ИЗМЕРИТЕЛЬНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2602734C2 |
| ОПТИЧЕСКИЙ ДАЛЬНОМЕР | 2010 |
|
RU2538418C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ДОКУМЕНТОВ | 2005 |
|
RU2378704C2 |
| ЛИСТОВОЙ МАТЕРИАЛ С ПЛАВАЮЩИМ СОСТАВНЫМ ИЗОБРАЖЕНИЕМ, СОДЕРЖАЩИЙ МИКРОЛИНЗЫ | 2002 |
|
RU2319185C2 |
| ИМПУЛЬСНЫЙ ФОТОМЕТР | 1998 |
|
RU2184942C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ | 2011 |
|
RU2561867C2 |
| ДЕТЕКТОР СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ | 2007 |
|
RU2457492C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И ИДЕНТИФИКАЦИИ ФОРМЫ И СТРУКТУРЫ ОБЪЕКТА | 2020 |
|
RU2750681C1 |
| ЛИСТОВОЙ МАТЕРИАЛ С ПЛАВАЮЩИМ КОМБИНИРОВАННЫМ ИЗОБРАЖЕНИЕМ | 2000 |
|
RU2273038C2 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ОПТОВОЛОКОННЫХ ДИФРАКЦИОННЫХ РЕШЕТОК С БОЛЬШИМ ПЕРИОДОМ, А ТАКЖЕ УСТРОЙСТВО НА ЕГО ОСНОВЕ ДЛЯ ИЗГОТОВЛЕНИЯ ДВУХПОЛОСНЫХ ОПТОВОЛОКОННЫХ ДИФРАКЦИОННЫХ РЕШЕТОК С БОЛЬШИМ ПЕРИОДОМ | 1999 |
|
RU2205437C2 |














Устройство содержит источник света, комбинированную структуру из прозрачной оптической маски и диффузора и детектор. Источник света адаптирован для создания исходящего опорного луча. Комбинированная структура помещена на пути возвращающегося луча, который возникает при отражении исходящего опорного луча от объекта снаружи устройства. Детектор ориентирован для приема указанного отраженного луча после его прохождения через прозрачную оптическую маску и рассеяния диффузором. Технический результат - повышение точности измерений. 2 н. и 19 з.п. ф-лы, 20 ил.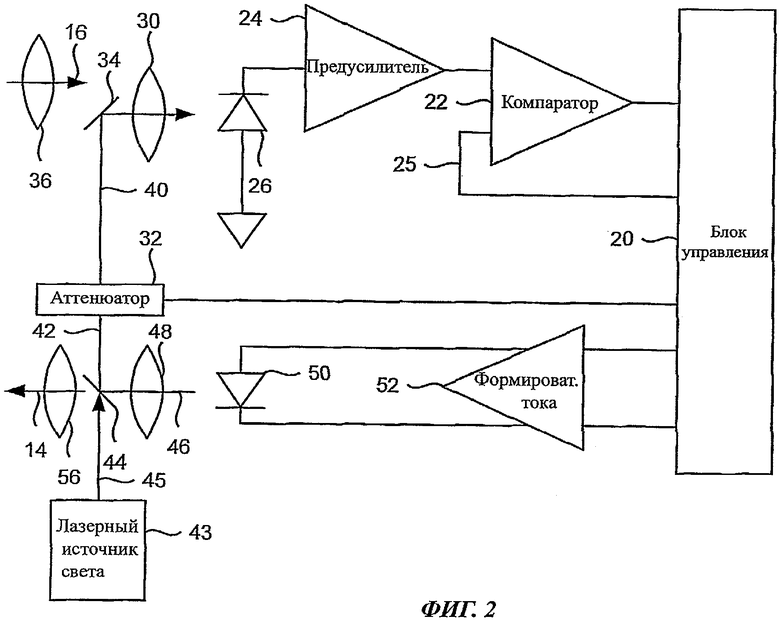
1. Устройство для измерения расстояний, содержащее:
источник света, адаптированный для создания исходящего опорного луча;
комбинированную структуру из прозрачной оптической маски и диффузора, помещенную на пути возвращающегося луча, который возникает при отражении исходящего опорного луча от объекта снаружи устройства, и
детектор, ориентированный для приема указанного отраженного луча после его прохождения через прозрачную оптическую маску и рассеяния диффузором.
2. Устройство по п.1, отличающееся тем, что возвращающийся луч имеет положение, зависящее от расстояния до указанного объекта, а диффузор устанавливается так, чтобы принимать указанный возвращающийся луч, когда указанное расстояние оказывается в заданном интервале, составляющем примерно 0,2-5 м.
3. Устройство по п.1, отличающееся тем, что детектор устанавливается в детекторном корпусе, а диффузор монтируется на часть этого корпуса.
4. Устройство по п.3, отличающееся тем, что детекторный корпус монтируется на печатной плате.
5. Устройство по п.3, отличающееся тем, что диффузор имеет полукруглое сечение с прямолинейным краем, причем часть с прямолинейным краем разделяет траекторию нерассеиваемого луча от траектории рассеиваемого луча.
6. Устройство по п.5, отличающееся тем, что прямолинейный край располагается на расстоянии от центральной линии детектора, составляющем около 250-500 мкм.
7. Устройство по п.3, отличающееся тем, что диффузор имеет круглое поперечное сечение с отверстием в центре, причем отверстие в центре обеспечивает прохождение нерассеиваемого луча.
8. Устройство по п.3, отличающееся тем, что корпус детектора содержит печатную плату, а детектор монтируется на печатной плате.
9. Устройство по п.1, отличающееся тем, что угловое распределение диффузора находится в интервале значений от 5° на 30° до 10° на 60°.
10. Устройство по п.9, отличающееся тем, что угловое распределение диффузора составляет 10° на 60°.
11. Устройство по п.1, отличающееся тем, что диффузор помещен над детектором на высоте примерно от 1 до 3 мм.
12. Устройство для измерения расстояний, содержащее:
источник света, адаптированный для создания луча;
светоделительную пластину, установленную для приема указанного луча, созданного источником света, и для разделения указанного луча на исходящий опорный луч и внутренний опорный луч;
комбинированную структуру из прозрачной оптической маски и диффузора, каждая из которых установлена так, чтобы принимать внутренний опорный луч и возвращающийся луч, возникающий при отражении исходного опорного луча от объекта снаружи устройства, и
детектор, ориентированный для приема внутреннего опорного луча и указанного отраженного луча, прошедшего через указанную комбинированную структуру.
13. Устройство по п.12, отличающееся тем, что возвращающийся луч имеет положение, зависящее от расстояния до указанного объекта, а диффузор устанавливается так, чтобы принимать указанный возвращающийся луч, когда указанное расстояние оказывается в заданном интервале значений, составляющем примерно 0,2-5 м.
14. Устройство по п.12, отличающееся тем, что детектор устанавливается в детекторном корпусе, а диффузор монтируется на часть этого корпуса.
15. Устройство по п.14, отличающееся тем, что диффузор имеет полукруглое сечение с прямолинейным краем.
16. Устройство по п.15, отличающееся тем, что прямолинейный край располагается на расстоянии от центральной линии детектора, составляющем около 250-500 мкм.
17. Устройство по п.14, отличающееся тем, что диффузор имеет круглое поперечное сечение с отверстием в центре, причем отверстие в центре обеспечивает прохождение нерассеиваемого луча.
18. Устройство по п.14, отличающееся тем, что корпус детектора содержит печатную плату, а детектор монтируется на печатной плате.
19. Устройство по п.12, отличающееся тем, что угловое распределение диффузора находится в интервале значений от 5° на 30° до 10° на 60°.
20. Устройство по п.19, отличающееся тем, что угловое распределение диффузора составляет 10° на 60°.
21. Устройство по п.1, отличающееся тем, что диффузор помещается над детектором на высоте примерно 2,5 мм.
| US 6624899 B1, 23.09.2003 | |||
| US 6233045 B1, 15.05.2001 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 3497695 A, 24.02.1970 | |||
| US 6072760 A, 06.06.2000 | |||
| US 6538243 B1, 25.03.2003. | |||

