Область техники, к которой относится изобретение
Изобретение относится к компактному оптическому сенсорному устройству определения дальности, скорости и идентификации формы и структуры объекта, например твердотельному лидару, способу определения дальности, скорости идентификации формы и структуры объекта c помощью указанного оптического сенсорного устройства, и может быть использовано в различных отраслях техники. Оптическое сенсорное устройство, согласно изобретению выполнено с возможностью определения расстояния до объекта, скорости объекта, а также структуры объекта и структуры или материала, из которого выполнен объект и может использоваться в сенсорах для целей навигации, используемых для мобильных электронных устройств, компактных переносных устройствах, как для бытовых целей, например пылесосах, и в других бытовых приборах для расширений их функции, в частности в качестве датчика жестов, так и в целях промышленного производства для навигации объекта и безконтактной идентификации параметров объекта, например структуры и материала (состава) объекта.
Описание предшествующего уровня техники
Устройства определения дальности или лидары(LIDAR), которые дословно расшифровываются как системы световой идентификации, обнаружения и определения дальности изначально предназначались для военных целей и были направлены на отслеживания целей (объектов) на большие расстояние, составляющие десятки километров. Но с ростом популярности портативных электронных устройств вырос спрос на компактные лидары для идентификации объектов на небольшие расстояния (несколько метров) в закрытых помещениях, и используемые в компактной робототехнике, например компактных бытовых пылесосах.
Известные в уровне техники лидары работают по следующему принципу:
устройство в виде ИК светодиода или лазера посылает наружу направленное излучение, затем с помощью светочувствительного приемника (датчика) принимает отраженные волны и строит исходя из этого картину пространства.
Получив время, за которое вернулась отраженная волна, мы можем определить расстояние до объекта в поле зрения датчика, например по формуле:
D - измеренное расстояние; c - скорость света в оптической среде; f- частота сканирующих импульсов; Δφ-фазовый сдвиг. Подобный принцип определения дистанции называют время-пролетным (Time-of-flight (ToF)).
Из уровня техники известна компактная система лидара, см. US 10,215,846 B2, опубл. 26.02.2019; IPC G01S 17/02, работающая по описанному выше время-пролетному принципу. Система лидара включает в себя статический монолитный приемопередатчик 202, коллимирующую оптику, первую и вторую поворотные клиновидные призмы 206, 208. Вращая клиновидную призму 206 относительно клиновидной призмы 208, коллимированный лазерный луч может управляться вследствие преломления коллимированного лазерного луча, когда он проходит через клиновидные призмы 206 и 208. Статический монолитный приемопередатчик 202 выполнен с возможностью испускать лазерный луч и принимать отраженный лазерный свет от первого целевого объекта. В указанной системе лидара эммитер и детектор объединены на одном чипе-приемопередатчик 202. При этом указанной системе свойственны следующие недостатки: для вращения клиновидных призм 206, 208 необходимы механические моторы 210, 212, что сопровождается значительными размерами устройства, что делает невозможным использование лидара в компактных электронных устройствах. Кроме того, традиционно для время-пролетного решения необходимо быстродействующая электроника для измерения времени пролета света в нс, что значительно усложняет и удорожает изготовление системы лидара. При этом указанная система лидара обеспечивает получение информации только о расстоянии до объекта. И указанной системе лидара свойственна засветка от других источников и шумы от интерференции от других возможных лидаров, находящихся в зоне работы системы лидара, что значительно снижет точность получения данных о расстоянии до объекта.
Компактный лазерный сканер на основании матрицы поверхностно-излучающих лазеров с вертикальным резонатором(VCSEL) раскрыт в US 7,544,945 B2, опубл. 09.06.2009 г. IPC G01J 5/02 и также относится к время-пролетному решению. Указанная система 100 используется в автомобильных лидарах и содержит матрицу 110 из множества полупроводниковых лазеров 120; оптический элемент 130, установленный относительно множества лазеров, так что, по меньшей мере, два из множества лазеров создают лучи, которые выходят из оптического элемента в существенно разных направлениях; и схему управления, связанную с множеством полупроводниковых лазеров и выполненную с возможностью последовательной и раздельной активации, по меньшей мере, двух из множества лазеров. Посредством последовательной активации каждого полупроводникового лазера по отдельности система 100 может использоваться для сканирования лазерного луча в поле зрения линзы 130. Один или несколько фотодетекторов могут быть расположены вблизи лазерной матрицы 110 для сбора света от активированного лазера, который отражается объектами, освещаемыми лазерным лучом. Угловая информация, например, направление обнаруженного объекта, определяется посредством знания того, какой полупроводниковый лазер в матрице был активирован. Линзы также могут быть интегрированы с фотодетекторами или связаны с ними для повышения эффективности обнаружения и повышения уровня обнаруженного сигнала. Система 100 работает таким образом, что может заменить лидарные лазерные системы, в которых используются механические приводы для вращения или перемещения отражающей оптики. При этом лазеры 120 и фотодекторы расположены на одном чипе. Следует отметить, что указанной системе, основанной на время-пролетном принципе свойственны все недостатки присущие решению, раскрытому в US 10,215,846 B2: необходима быстродействующая электроника для измерения времени пролета света в нс, что значительно усложняет и удорожает изготовление системы лидара; указанная система лидара обеспечивает получение информации только о расстоянии до объекта. И указанной системе лидара свойственна засветка от других источников и шумы от интерференции от других возможных лидаров, находящихся в зоне работы системы лидара, что значительно снижет точность получения данных о расстоянии до объекта.
Из уровня техники известен лазерный радар, см. публикация WO 2018/133084 A1, опубл.26.07.2018г. IPC G01S 17/08, представляющий собой массив поверхностно-излучающих лазеров 150 с вертикальной полостью (VCSEL) на первой подложке (110) и массив детекторов (143) на второй подложке (120), причем детекторы и лазеры находятся на одном чипе. При этом детекторы (143) выполнены с возможностью обнаружения лазерных лучей, испускаемых VCSEL (150) и обратно рассеянных объектом, причем первая подложка (110) прикреплена ко второй подложке (120) и сконфигурирована так, чтобы обеспечивать прохождение лазерных лучей, испускаемых VCSEL (150) и обратно рассеянных от объекта, через первую подложку (110) и достигать детекторов (143).
Следует отметить, что указанному радару, основанному на время-пролетном принципе свойственны все недостатки, присущие подобным решениям: необходима быстродействующая электроника для измерения времени пролета света в нс, что значительно усложняет и удорожает изготовление радара; указанный лазерный радар обеспечивает получение информации только о расстоянии до объекта. И указанному радару свойственна засветка от других источников и шумы от интерференции от других подобных устройств, находящихся в зоне работы системы лазерного радара, что значительно снижет точность получения данных о расстоянии до объекта.
Наиболее близким аналогом заявленного изобретения является решение, основанное на принципе гомодинной интерференции (self-mixing interference) и раскрытое в US 8,692.979 B2, опубл. 08.04.2014г., IPC G01C 3/00, которое содержит содержащий сенсорный модуль (1) для измерения расстояния до цели и/или скорости цели (50), причем сенсорный модуль (1) содержит, по меньшей мере, один лазерный источник (100), например поверхностно-излучающий лазер с вертикальным резонатором(VCSEL), по меньшей мере один детектор (200), лазер VCSEL и детектор интегрированы в одном устройстве, и по меньшей мере один элемент управления (400). Детектор (200) может обнаруживать модуляцию резонирующего лазерного излучения в лазерном источнике(100). Модуляция лазерного света в лазерном источнике может быть индуцирована лазерным светом, отраженным мишенью, повторно входящей в лазерный источник. Эффект известен специалистам в данной области техники как гомодинная интерференция (self-mixing interference). В зависимости от схемы электрического привода лазерного источника можно определить расстояние и/или скорость цели. Лазерный сенсор основан на принципе непрерывного излучения с частотной модуляцией(FMCW). В данной конструкции нет проблем, свойственных времяпролетным решениям, т.е. возможность засветки от других источников излучения и помехи от других функционирующих подобных устройств. Однако излучающая область лазеров VCSEL достаточна мала и составляет 10-15 мкм, что в свою очередь обуславливает довольно низкое соотношение сигнала/шум лазерного сенсора. Указанный лазерный сенсор обеспечивает только получение расстояния до цели.
Таким образом, для устранения всех вышеуказанных недостатков лидаров известного уровня техники авторы создали компактное оптическое сенсорное устройство определения дальности, скорости и идентификации формы и структуры объекта и способ определения дальности, скорости и идентификации формы и структуры объекта с помощью указанного устройства.
Как уже указывалось выше, задача заявленного изобретения заключается в создании сенсорного устройства, работающего на небольшие расстояния, в частности 1-10 м, безопасного для глаз пользователя, обеспечивающего помимо получения расстояния как неподвижного, так и движущегося объекта, и скорости объекта, также форму объекта и его структуру, т.е. тип материала, из которого выполнен исследуемый объект. Кроме того, если в традиционных устройствах определения дальности, т.е. лидарах предусмотрены механические двигатели для обеспечения вращения платформы, на которой установлены средства, обеспечивающие сканирование объекта (поворотные призмы и т.п.) в заявленном сенсорном устройстве отсутствуют движущиеся механические части, что повышает надежность функционирования и технологичность лидара. Кроме того, поскольку заявленное сенсорное устройство использует когерентный прием (т.е. такой прием, при котором существенное усиление получает только сигнал, когерентный локальному осциллятору) любые другие (некогерентные локальному осциллятору) сигналы не будут усилены и будут незаметны на фоне шума. Таким образом, любые подобные средства, работающие рядом не будут создавать помехи и исключена возможность засвечивания заявленного сенсорного устройства другими источниками излучения, например солнцем или внешним искусственным освещением, в частности уличными фонарями. Заявленное сенсорное устройство выполнено с возможностью оперативного перестраивания параметров работы, благодаря регулированию тока, подаваемого на источники лазерного излучения, имеет небольшой вес (от несколько десятков грамм), что позволяет его встраивать в мобильные электронные устройства.
Сущность изобретения
Согласно первому аспекту изобретения представлено оптическое сенсорное устройство для определения расстояния до объекта, скорости объекта и для идентификации формы и структуры объекта, содержащее:
оптически сопряженные по меньшей мере один источник лазерного излучения, по меньшей мере одно оптическое коллимирующее средство, расположенное над соответствующим по меньшей мере одним источником лазерного излучения, светоделительное средство, светоотражающее средство, оптическое средство направления луча, выполненное с возможностью направления луча в предварительно определенном направлении к объекту, и по меньшей мере один детектор для регистрации излучения отраженного от объекта, а также контроллер соединенный с каждым из по меньшей мере одного детектора и по меньше одного источника лазерного излучения,
при этом каждый из по меньшей мере одного источника лазерного излучения с соответствующим по меньшей мере одним детектором образуют по меньшей мере один индивидуально функционирующий и индивидуально настраиваемый измерительный канал с возможностью обеспечения данных о расстоянии до объекта,
при этом контроллер выполнен с возможностью обеспечения одновременного или выборочного функционирования указанных измерительных каналов и оперативного регулирования параметров излучения по меньшей мере одного источника лазерного излучения, в зависимости от требуемого оперативного разрешения по дальности во время функционирования устройства, и обработки и анализа данных объекта регистрируемых на по меньшей мере одном детекторе для одновременного определения расстояния до объекта и его скорости, и распознавания формы и структуры объекта.
В указанном сенсорном устройстве по меньшей мере один источник лазерного излучения представляет собой лазер с возможностью перестройки длины волны, например поверхностно-излучающий лазер с вертикальным резонатором (VCSEL) с длиной волны излучения от 700 до 950нм.
При этом по меньшей мере один источник лазерного излучения может содержать несколько источников лазерного излучения, образующих двухмерную матрицу источников лазерного излучения, а по меньшей мере один детектор представляет собой матричный фотодетектор или
по меньшей мере один детектор содержит несколько детекторов, образующих двухмерную матрицу детекторов.
Следует отметить, что в сенсорном устройстве по меньшей мере одно оптическое коллимирующее средство представляет собой по меньшей мере одну микролинзу, и выполнено с возможностью коллимирования излучения испускаемого по меньшей мере одним источником лазерного излучения или по меньшей мере одна микролинза представляет собой совокупность микролинз, образующих двухмерную матрицу микролинз.
Кроме того, светоделительное средство представляет собой светоделительный куб с полуотражающим зеркалом, расположенным внутри указанного куба и выполненный с возможностью разделения луча на опорный и измерительный лучи, а светоотражающее средство представляет собой светоотражающее покрытые, нанесенное на внутреннюю или внешнюю поверхность светоделительного куба и выполненное с возможностью переотражения опорного луча на соответствующий детектор или светоотражающее средство представляет собой зеркало, расположенное перед внешней поверхностью светоделительного куба, и выполненное с возможностью переотражения опорного луча на соответствующий по меньшей мере один детектор.
Следует также отметить, что в сенсорном устройстве оптическое средство направления луча представляет собой линзу, имеющую плоскую поверхность со стороны, обращенной к светоделительному кубу, а со стороны обращенной к объекту имеет поверхность, состоящую из по меньшей мере одной микролинзы, при этом каждая, из по меньшей мере одной микролинзы соответствует по меньшей мере одному источнику лазерного излучения.
Кроме того, каждая из по меньшей мере одной микролинзы расположена под заданным углом к соответствующему падающему лазерному лучу и выполнена таким образом, чтобы соответствующий лазерный луч после прохождения через микролинзу был направлен в требуемом заданном направлении к объекту.
Оптическое средство направления луча может быть выполнена в виде двухмерной матрицы микролинз, при этом каждая микролинза из матрицы микролинз расположена под заданным углом к соответствующему падающему лазерному лучу и выполнена таким образом, чтобы соответствующий лазерный луч после прохождения через микролинзу был направлен в требуемом заданном направлении к объекту.
В сенсорном устройстве согласно изобретению, предусмотрен также по меньшей мере один драйвер, соединенный с соответствующим по меньшей мере одним источником лазерного излучения и, обеспечивающий подачу на него тока накачки по управляющему сигналу контроллера.
Кроме того, в сенсорном устройстве также предусмотрен оптический изолятор, расположенный между светоделительным средством и по меньшей мере одним оптическим коллимирующим средством, и выполненный с возможностью предотвращение попадания, отраженного от целевого объекта, света на по меньшей мере один источник лазерного излучения и предотвращения дестабилизации функционирования указанных источников.
Одним из преимуществ заявленного сенсорного устройства согласно первому аспекту изобретения является его многомодальность. Сенсорное устройство может функционировать в качестве датчика жестов, посредством обеспечения оперативного регулирование параметров излучения по меньшей мере одного источника лазерного излучения, а также регулирования разрешения по дальности и поля зрения. При этом регулирование параметров излучения обеспечивается посредством изменения параметров тока накачки, подаваемого на указанный по меньшей мере один источник лазерного излучения, причем к параметрам тока накачки относятся частота и амплитуда модуляции тока, подаваемые на указанный по меньшей мере один источник излучения.
А регулирование разрешения по дальности обеспечивается посредством изменения одновременно количества функционирующих источников лазерного излучения и изменения амплитуды модуляции тока накачки, подаваемые на указанные источники лазерного излучения.
При этом регулирование поля зрения обеспечивается посредством изменения количества опрашиваемых детекторов.
Сенсорное устройство может функционировать в качестве трехмерного сканера, посредством обеспечения попеременного функционирования указанных источников лазерного излучения, оперативного регулирования параметров излучения по меньшей мере одного источника лазерного излучения, а также регулирования разрешения по дальности и поля зрения.
В данном случае регулирование параметров излучения обеспечивается посредством изменения параметров тока накачки, подаваемого на указанный по меньшей мере один источник лазерного излучения, при этом
к параметрам тока накачки относятся частота и амплитуда модуляции тока, подаваемые на указанный по меньшей мере один источник излучения.
Кроме того, регулирование разрешения по дальности обеспечивается посредство изменения количества одновременно функционирующих источников лазерного излучения и изменения амплитуды модуляции тока накачки, подаваемые на указанные источники лазерного излучения, регулирование поля зрения обеспечивается посредством изменения количества опрашиваемых детекторов.
Согласно второму аспекту изобретения предложен способ определения расстояния до объекта, скорости объекта и для распознавания формы и структуры объекта посредством оптического сенсорного устройства согласно первому аспекту изобретения, при этом способ содержит следующие этапы, на которых:
-испускают лазерное излучение с предварительно заданной длиной волны от 700 до 950 нм с помощью по меньшей мере одного источника лазерного излучения, при этом оперативно регулируют ток накачки, подаваемый на по меньшей мере один источник лазерного излучения, в зависимости от требуемого разрешения объекта во время функционирования устройства, при этом регулируют ток накачки от 3 до 6 мА.
-направляют указанное излучение на светоделительное средство,
где часть излучения, представляющее собой опорный луч, перенаправляется на по меньшей мере один детектор,
а другая часть излучения, представляющая собой измерительный луч, направляется на оптическое средство направления луча, обеспечивающее отклонение указанного измерительного луча в предварительно заданном направлении к объекту,
далее, отраженный от объекта по меньшей мере один измерительный луч направляется на соответствующий по меньшей мере один детектор, на котором измеряется разность частот сигналов, сформированных измерительным и опорным лучами, на основании, которой одновременно, определяется расстояние L до объекта и скорость V объекта,
при этом по мере прохождения измерительного луча через объект и/или отражения от него обеспечивается регистрация распределения коэффициента отражения по меньшей мере одного измерительного луча, отраженного от объекта в зависимости от расстояния до объекта, на основании которой идентифицируется форма и структура объекта.
При этом расстояние L (м) до объекта определяется посредством соотношения:
 ,
,
где c-скорость света (м/c), α - скорость нарастания частоты излучения (Гц/с),
Δω1 -разность частот сигналов, сформированных измерительным и опорными лучами при нарастании частоты излучения (Гц),
и Δω2- разность частот сигналов, сформированных измерительным и опорными лучами при спаде частоты излучения (Гц).
Кроме того, скорость V (м/с) объекта определяется посредством соотношения:
 ,
,
где c-скорость света (м/c), α - скорость нарастания частоты излучения (Гц/с), ω0-частота испускаемого света (Гц)
Δω1 -разность частот сигналов, сформированных измерительным и опорными лучами при нарастании частоты излучения (Гц), и
Δω2- разность частот сигналов, сформированных измерительным и опорными лучами при спаде частоты излучения (Гц).
А на этапе регулирования тока накачки, подаваемого на по меньшей мере один источник лазерного излучение, обеспечивается оперативное изменение разрешения (Res) объекта по дальности, определяемое следующим соотношением:
Res
c- скорость света (м/с)
Ώ-зависимость частоты излучаемого лазерного света в зависимости от тока, накачиваемого в по меньшей мере один источник (11…1n) лазерного излучения (Гц/мА),
dI- амплитуда модуляции тока источника лазерного излучения в процессе сканирования объекта (мА).
Кроме того, в способе согласно изобретению, этап идентифицирования формы и структуры объекта, осуществляется в контроллере посредством сравнения полученной картины распределения коэффициента отражения по меньшей мере одного измерительного луча, отраженного от объекта с известными картинами распределения коэффициентов отражения свойственными определенным структурам объектов, хранящихся в памяти контроллера.
Краткое описание чертежей
Вышеописанные и другие признаки и преимущества настоящего изобретения поясняются в последующем описании, иллюстрируемом чертежами, на которых представлено следующее:
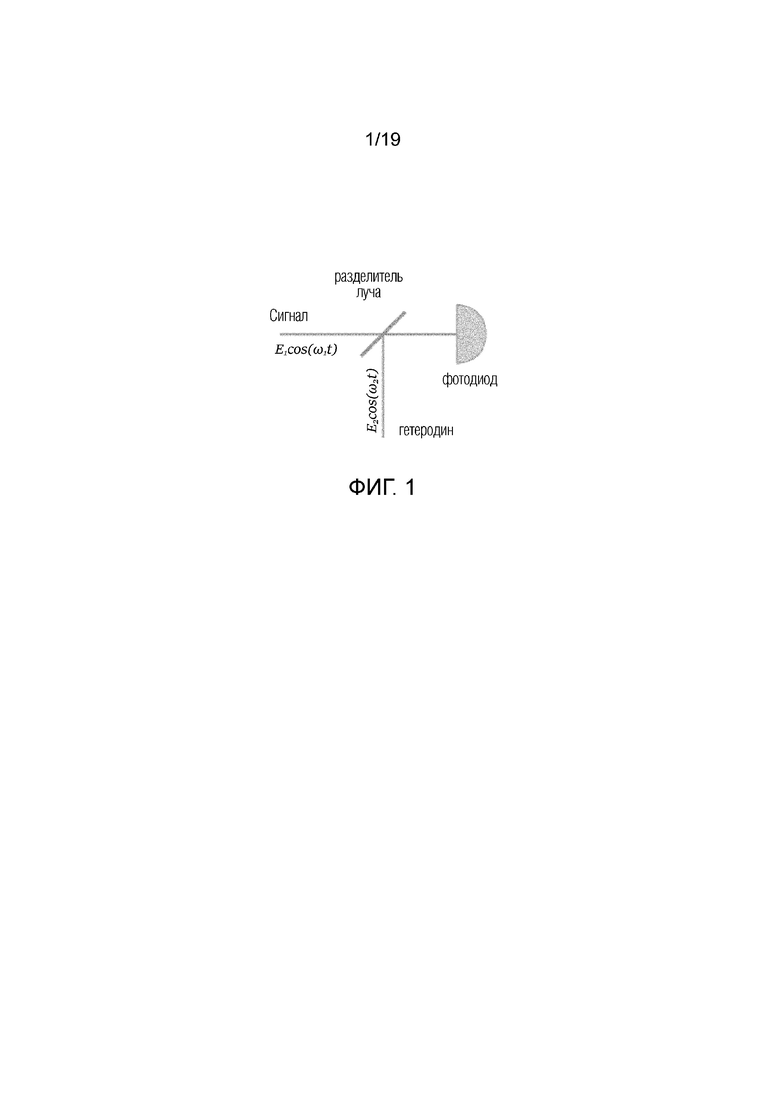
Фиг.1 - иллюстрирует схему гетеродинного метода измерения известного из уровня техники;
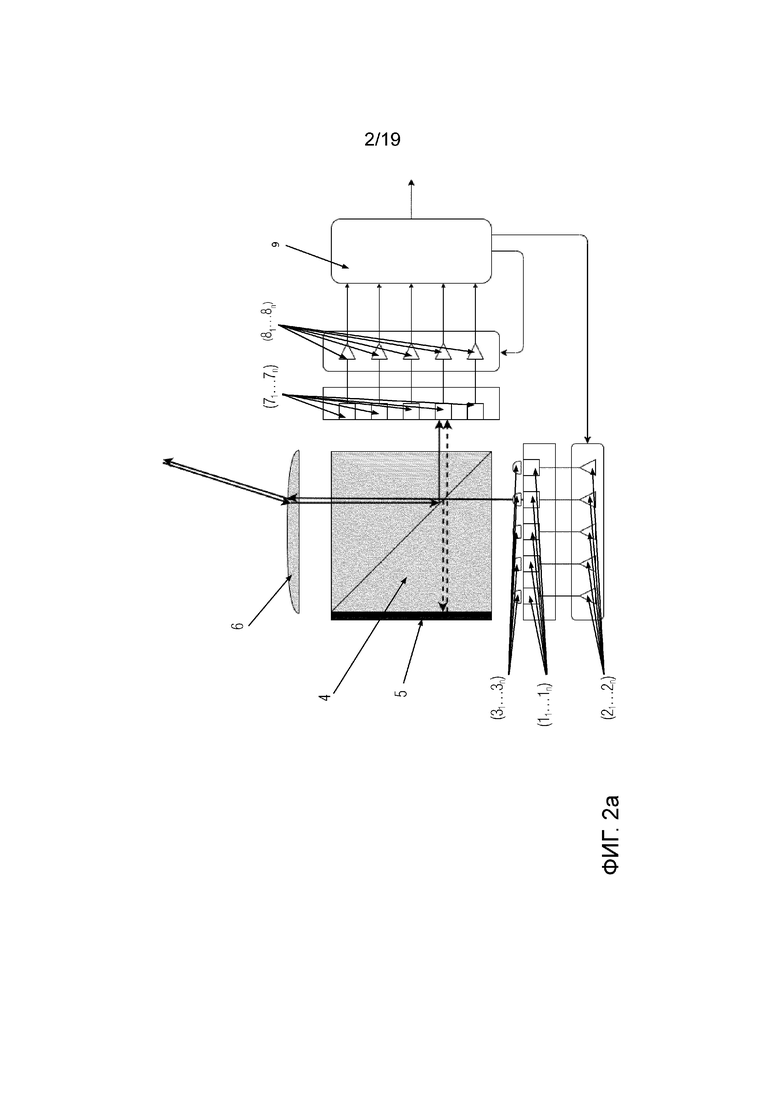
Фиг.2а - иллюстрируют схему оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов согласно первому варианту изобретения;
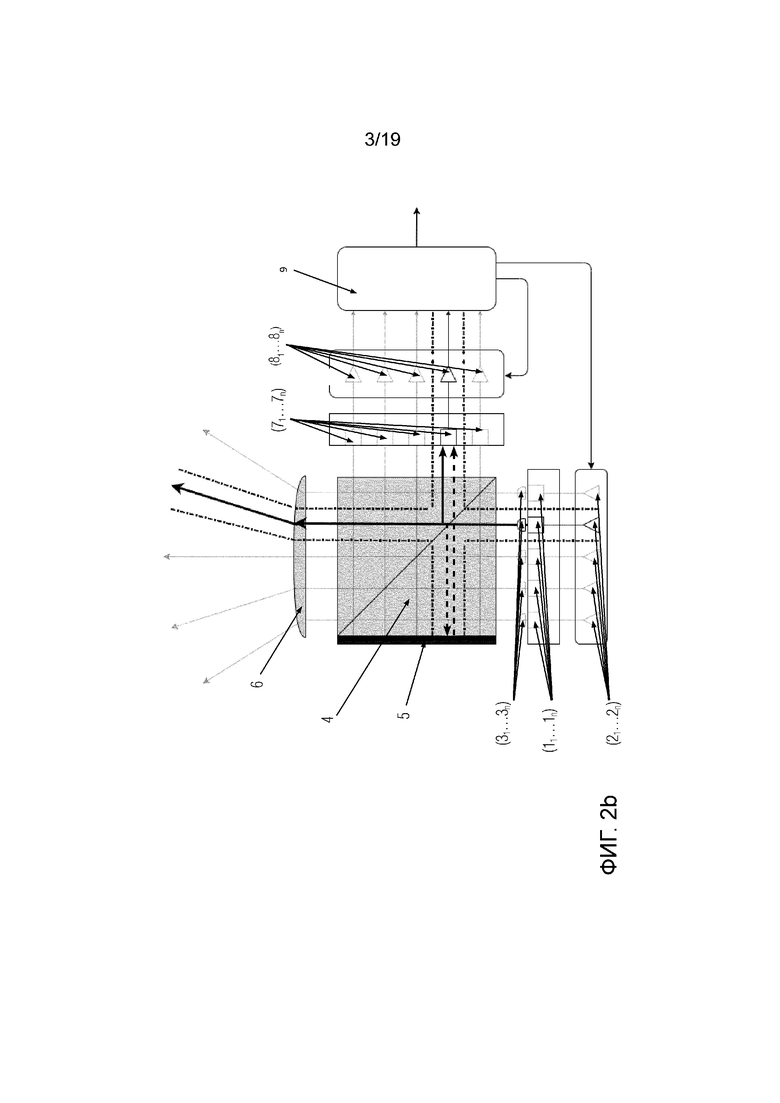
Фиг. 2b - иллюстрируют схему оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов с выделенными каналом, сформированным парой: источник лазерного излучения и детектор, согласно первому варианту изобретения;
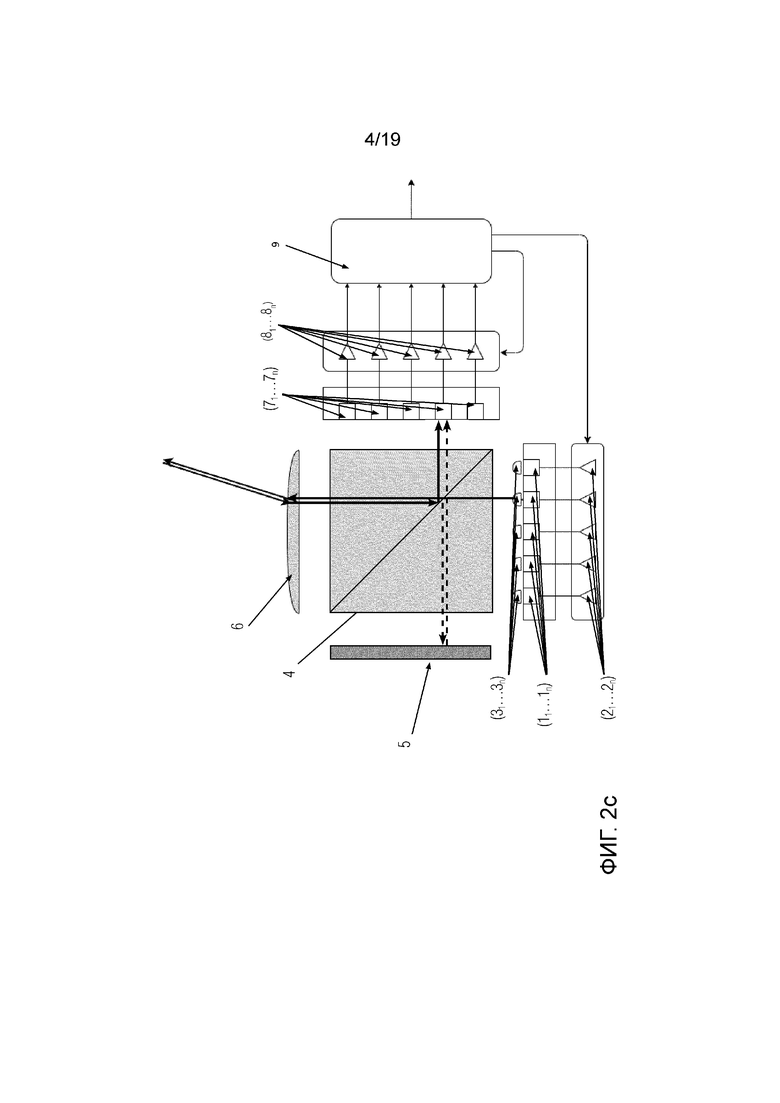
Фиг.2с - иллюстрируют схему оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов согласно второму варианту изобретения;
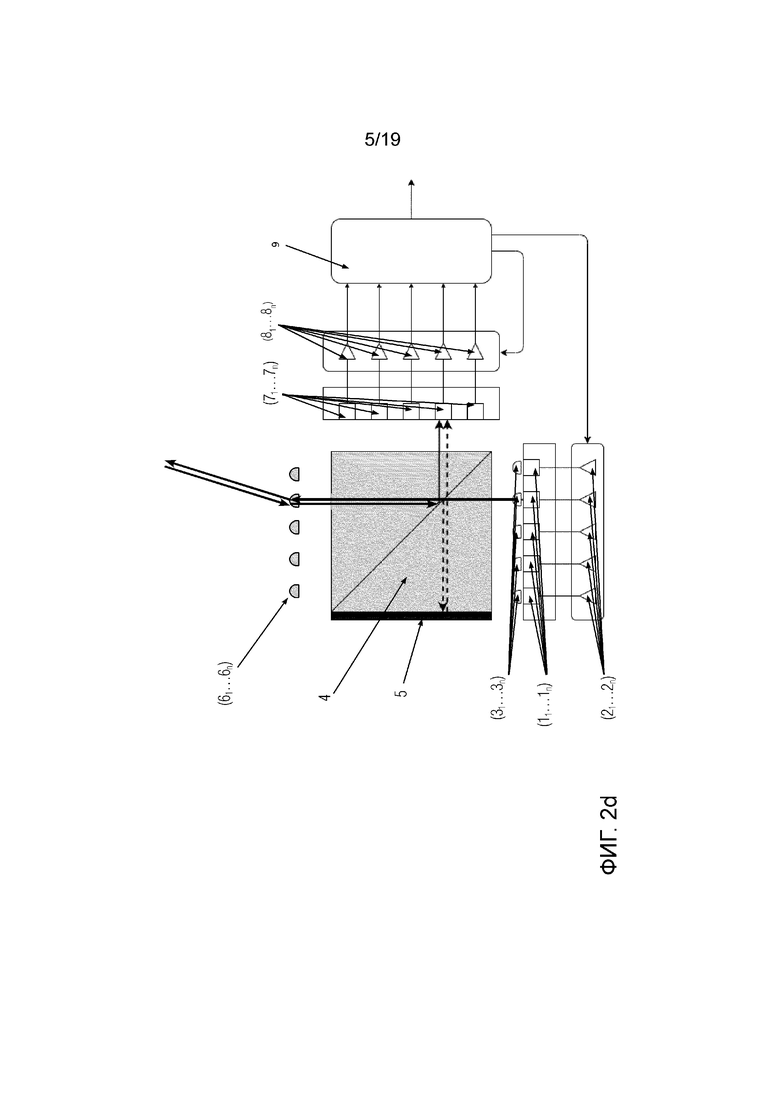
Фиг.2d - иллюстрируют схему оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов согласно третьему варианту изобретения;
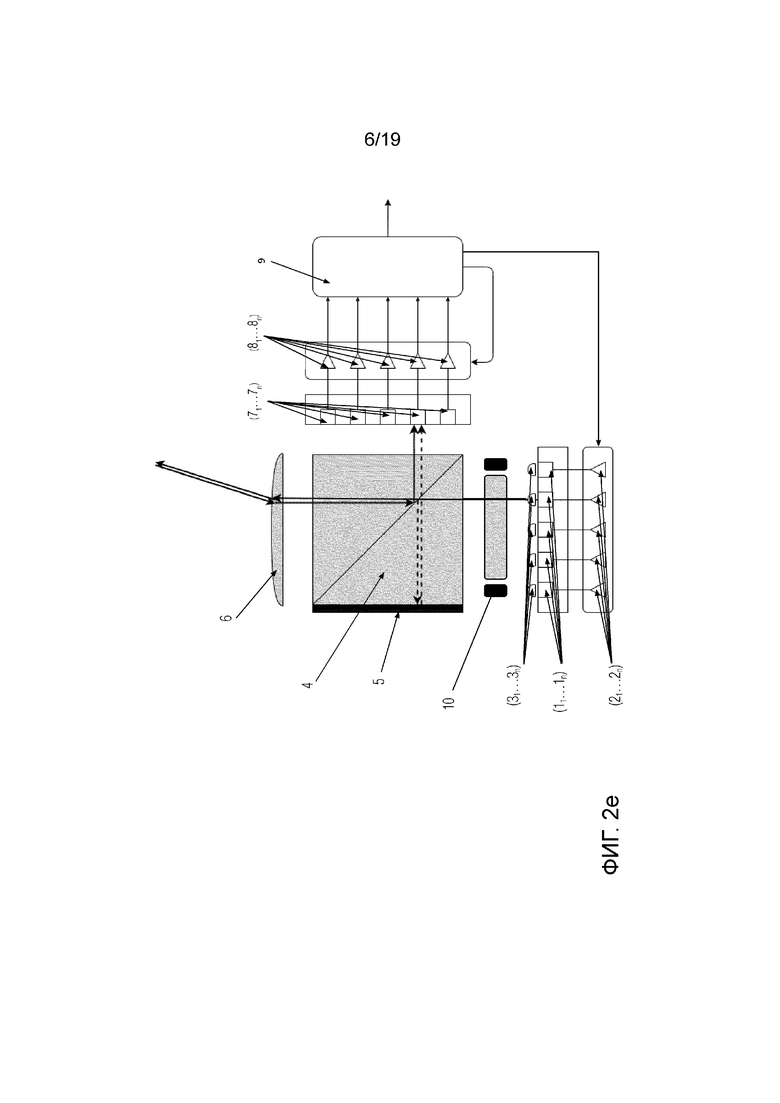
Фиг.2е - иллюстрируют схему оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов согласно четвертому варианту изобретения;
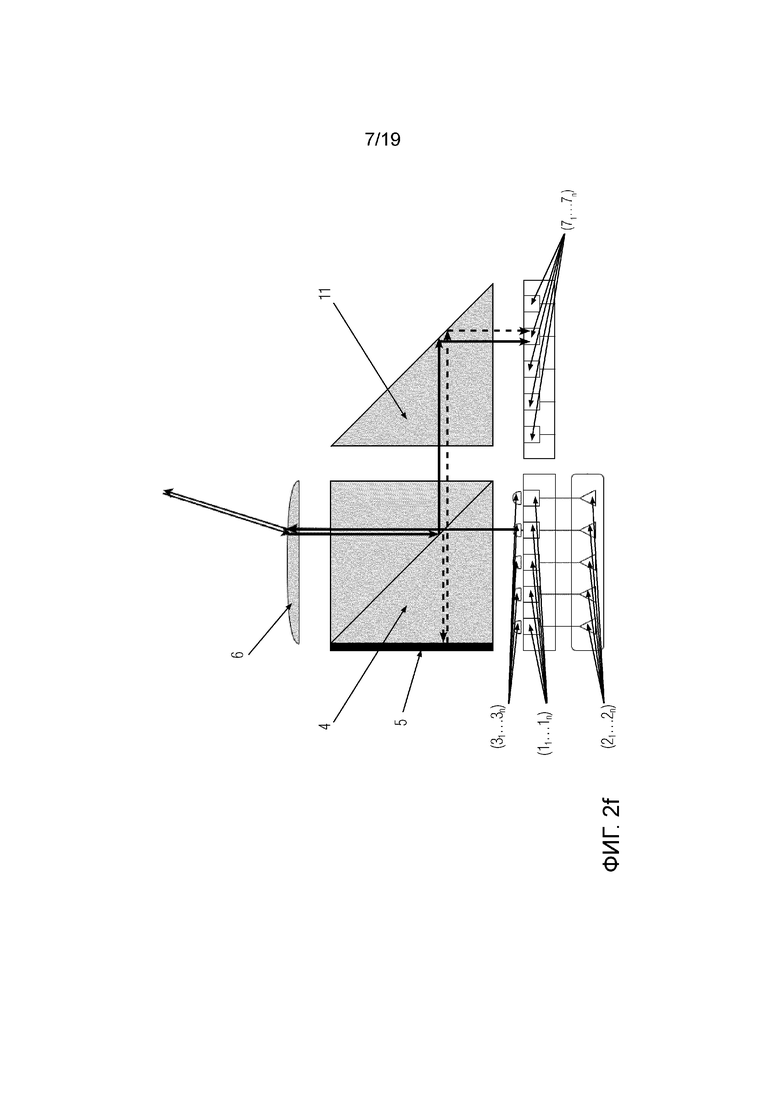
Фиг.2f - иллюстрируют схему оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов согласно пятому варианту изобретения;
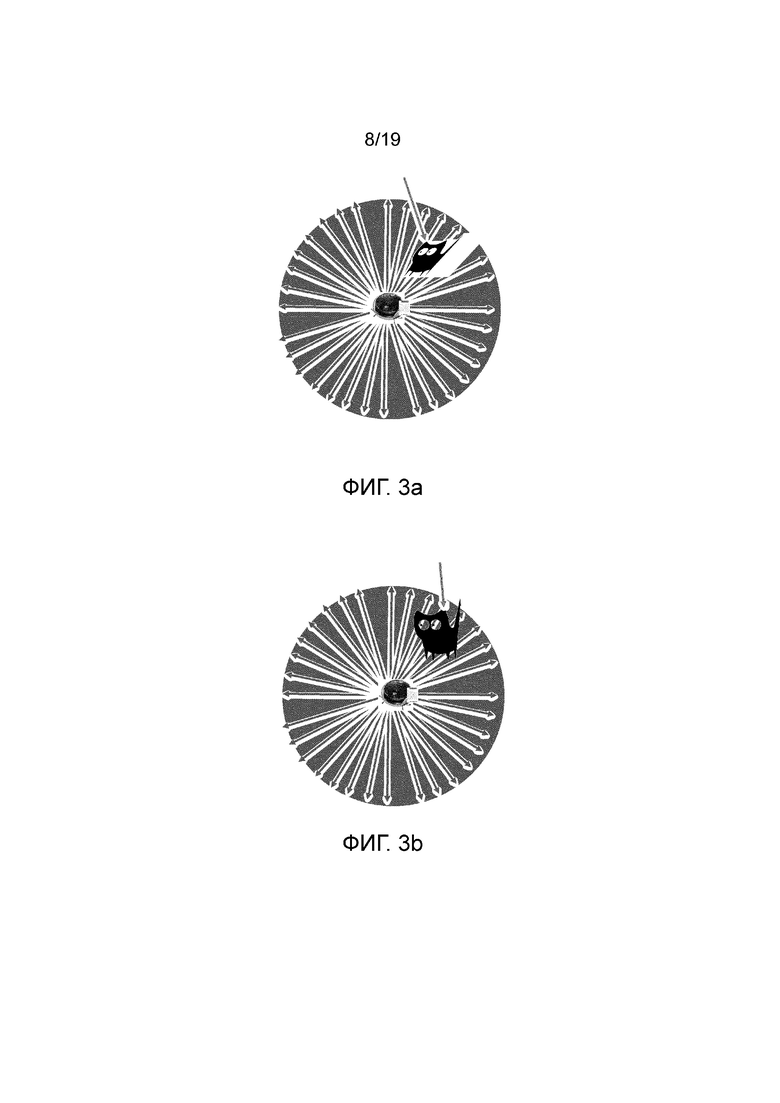
Фиг.3а- иллюстрирует пример изображения, сформированного при сканировании традиционными известными устройствами определения дальности (лидарами), основанными на время-пролетном принципе определения расстояния до объекта;
Фиг. 3b-иллюстрирует пример изображения, сформированного оптическим сенсорным устройством определения дальности, скорости и идентификации формы и структуры объектов согласно изобретению;
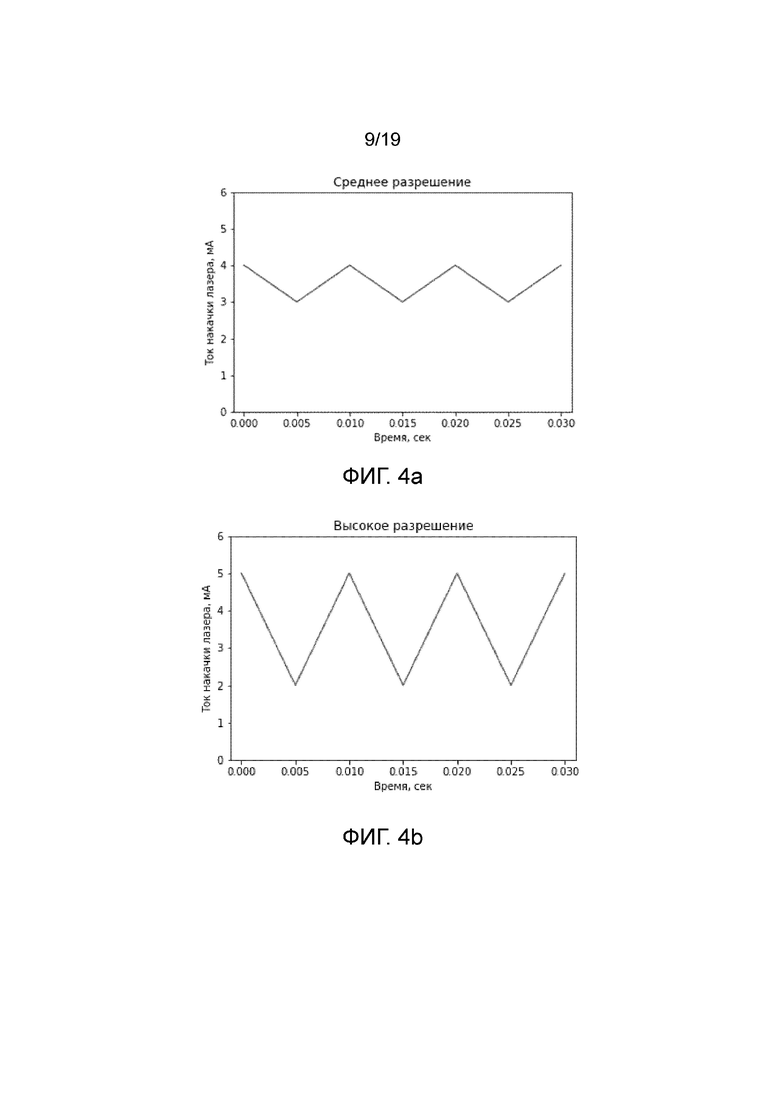
Фиг. 4а- представлен график, иллюстрирующий зависимость тока накачки источника лазерного излучения от времени для среднего разрешения по дальности;
Фиг. 4b - представлен график, иллюстрирующий зависимость тока накачки источника лазерного излучения от времени для высокого разрешения по дальности;
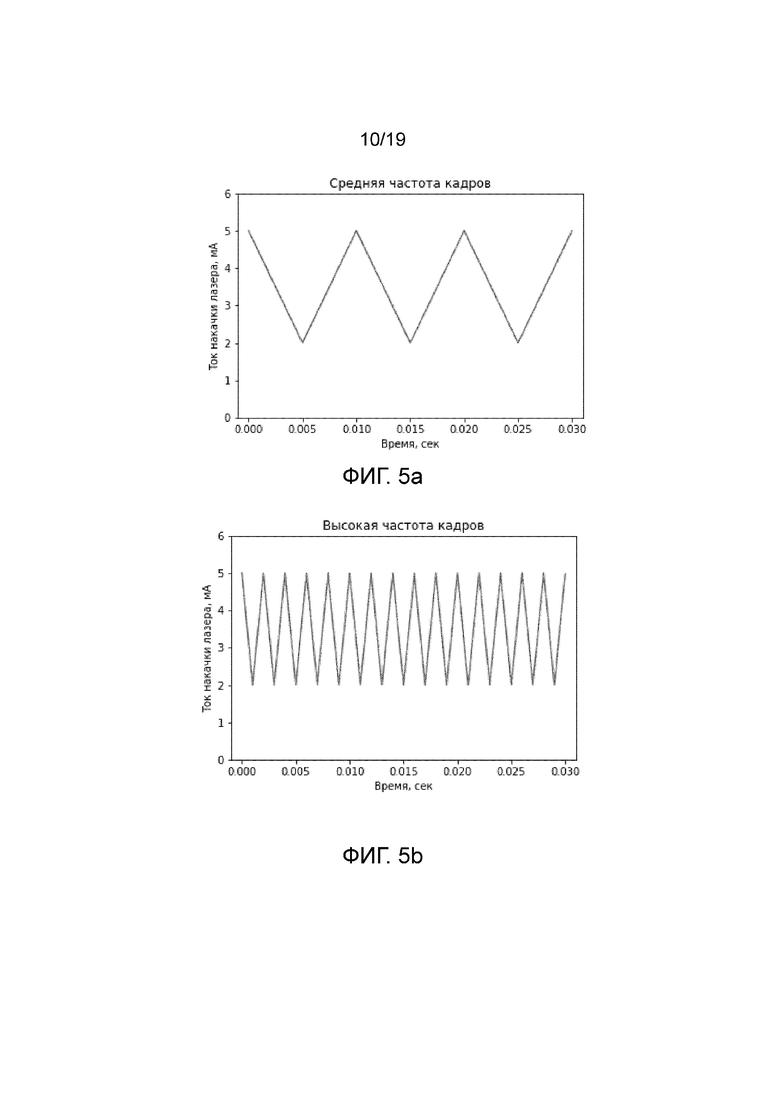
Фиг. 5а - представлен график, иллюстрирующий зависимость тока накачки источника лазерного излучения от времени для среднего показателя частоты кадров;
Фиг. 5b - представлен график, иллюстрирующий зависимость тока накачки источника лазерного излучения от времени для высокого показателя частоты кадров;
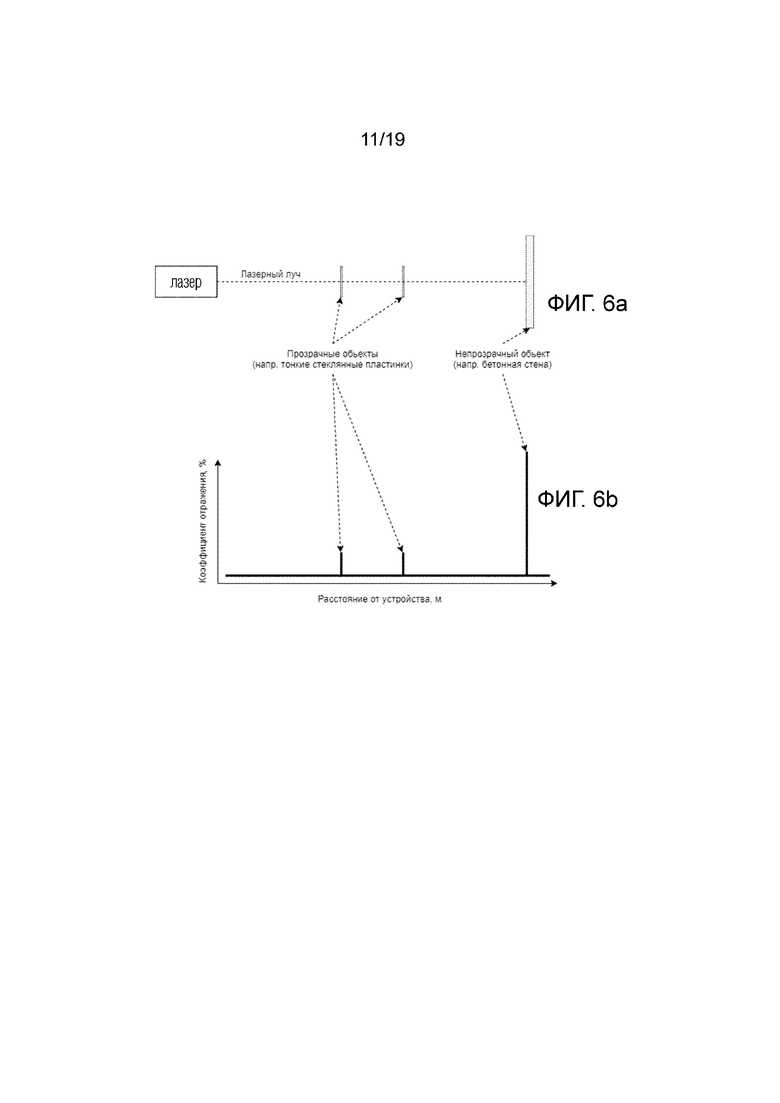
Фиг. 6а - представлен пример расположения прозрачных и непрозрачных объектов (две тонкие стеклянные пластинки как пример прозрачных объектов и бетонная стена как пример непрозрачного объекта) на пути следования лазерного луча;
Фиг. 6b-представлена схема распределения коэффициента отражения, вдоль хода лазерного луча, соответствующая примеру расположения прозрачных и непрозрачных объектов согласно фиг.6а;
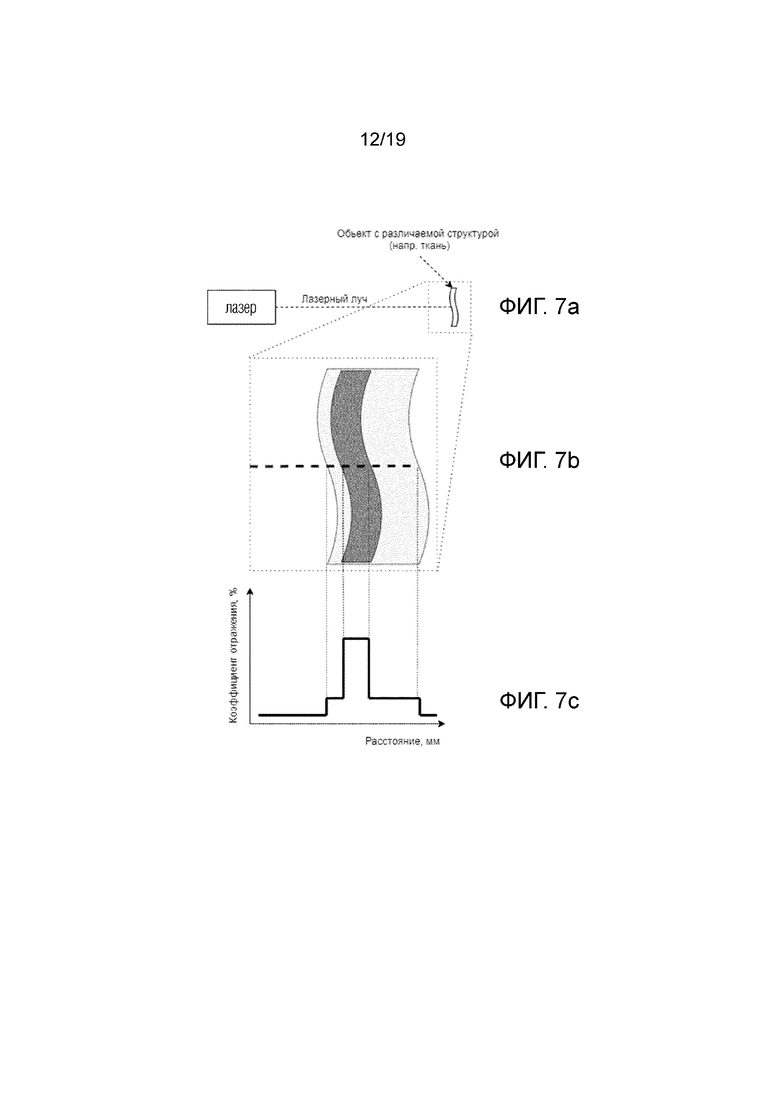
Фиг. 7а - представлен пример расположения объекта, представляющего собой ткань;
Фиг. 7b - представлен вид структуры ткани с более плотным «слоем» внутри согласно фиг.7а;
Фиг.7с - представлена схема распределения коэффициента отражения, вдоль хода лазерного луча, соответствующая примеру расположения объекта, представляющего собой ткань согласно фиг.7а и 7b;
Фиг. 8 -представлен схематичный вид оптического средства (6) направления луча в виде линзы согласно изобретению;
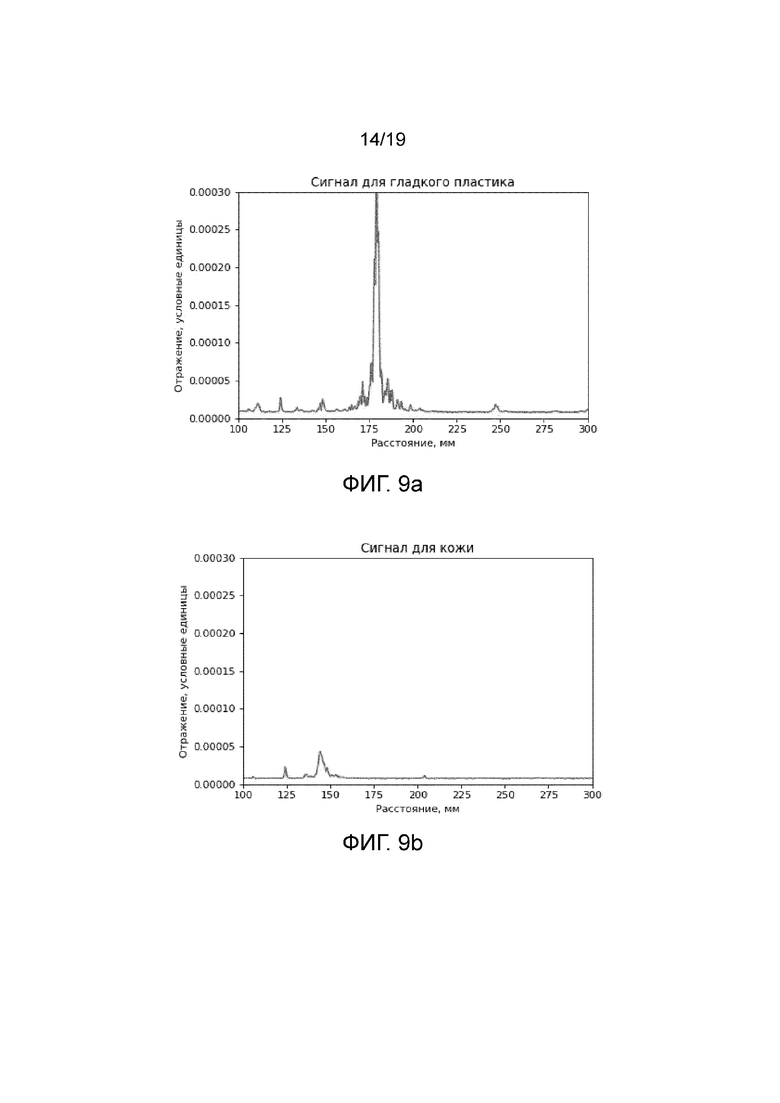
Фиг.9а - представлен график, иллюстрирующий сигнал, полученный при использовании в качестве объекта пластиковой пластинки;
Фиг.9b - представлен график, иллюстрирующий сигнал, полученный при использовании в качестве объекта кожи ладони человека;
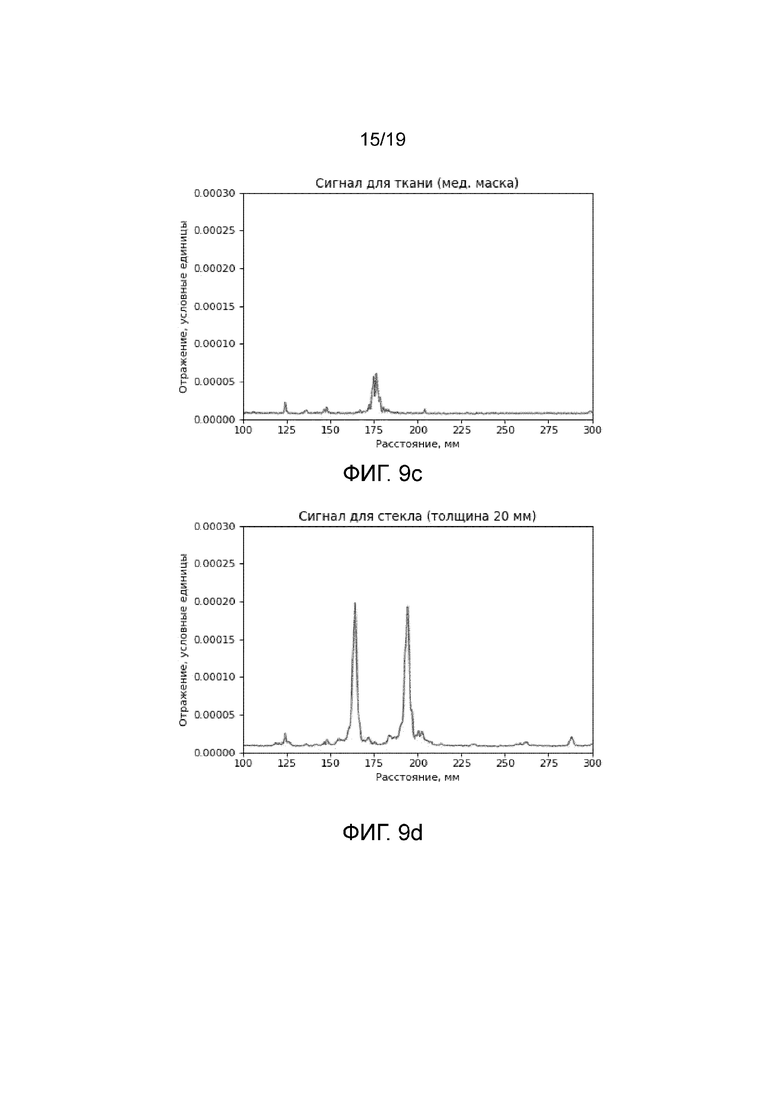
Фиг.9c - представлен график, иллюстрирующий сигнал, полученный при использовании в качестве объекта ткани защитной маски;
Фиг.9d - представлен график, иллюстрирующий сигнал, полученный при использовании в качестве объекта стеклянной пластинки;
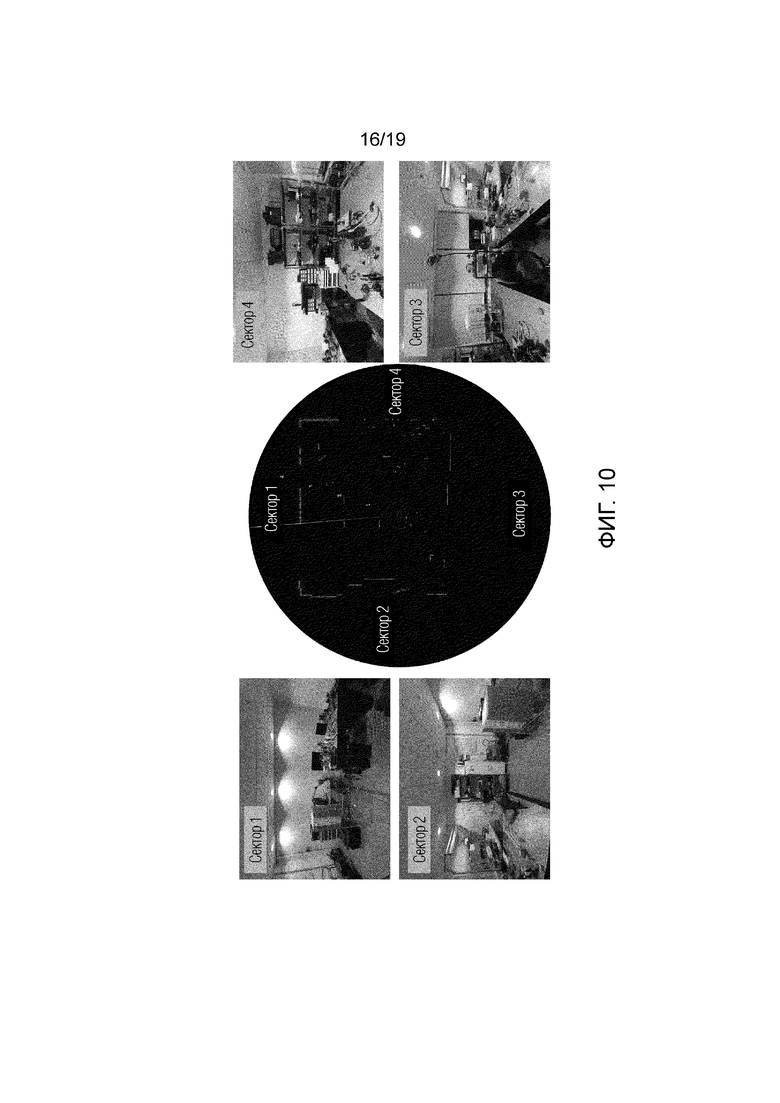
Фиг.10 - представлена карта навигации, сформированная компьютером на основе данных, полученных от контроллера (9) при идентификации объектов, находящихся в исследовательской лаборатории;
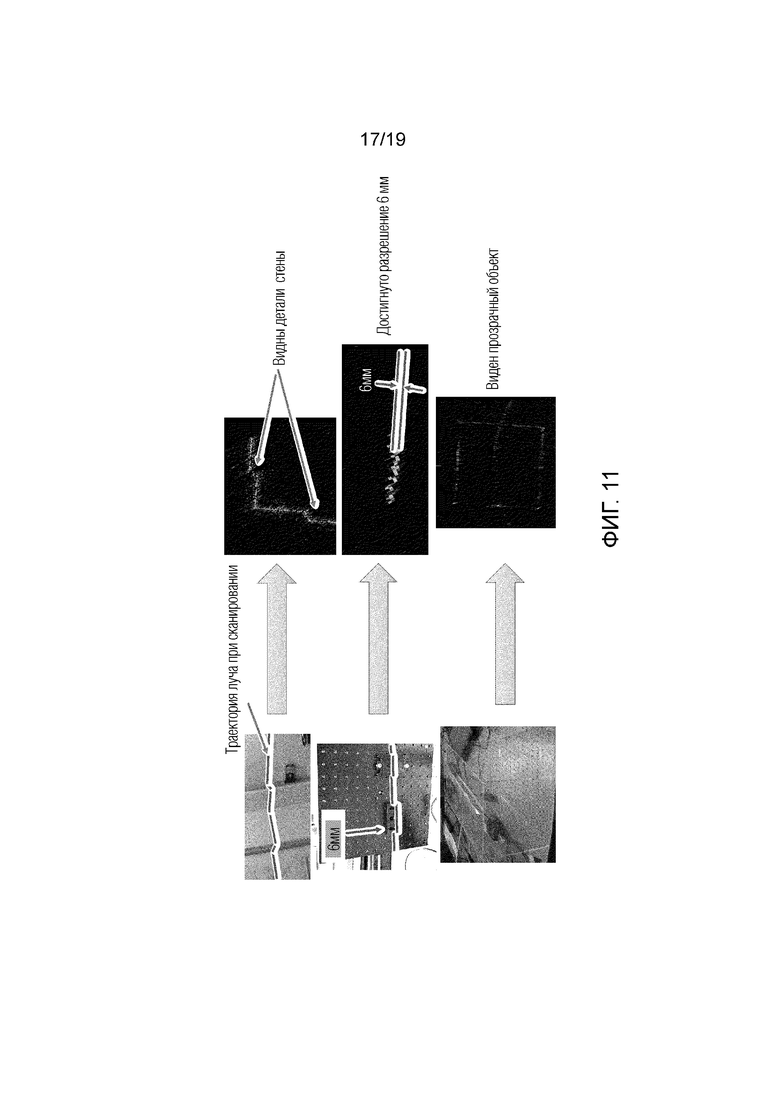
Фиг.11 - представлены в увеличенном виде детали изображений объектов с фиг.10;
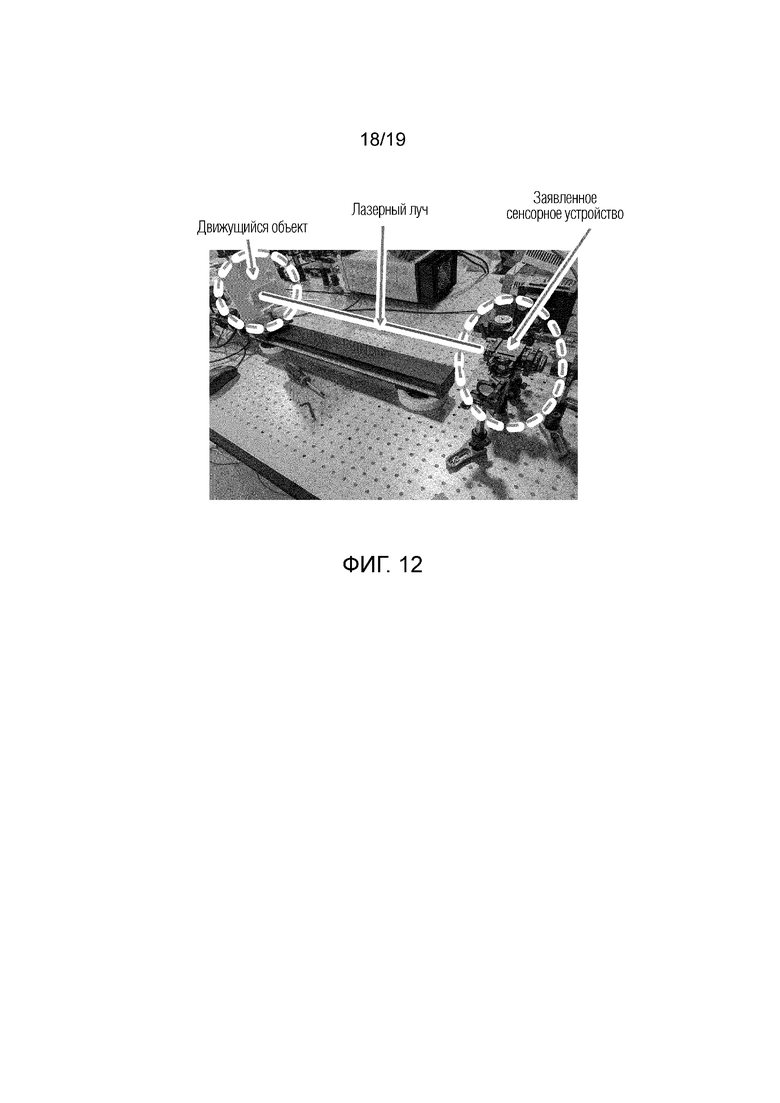
Фиг.12 - схематично представлена установка для экспериментальных исследований по точности измерения скорости движущегося объекта с помощью заявленного сенсорного устройства;
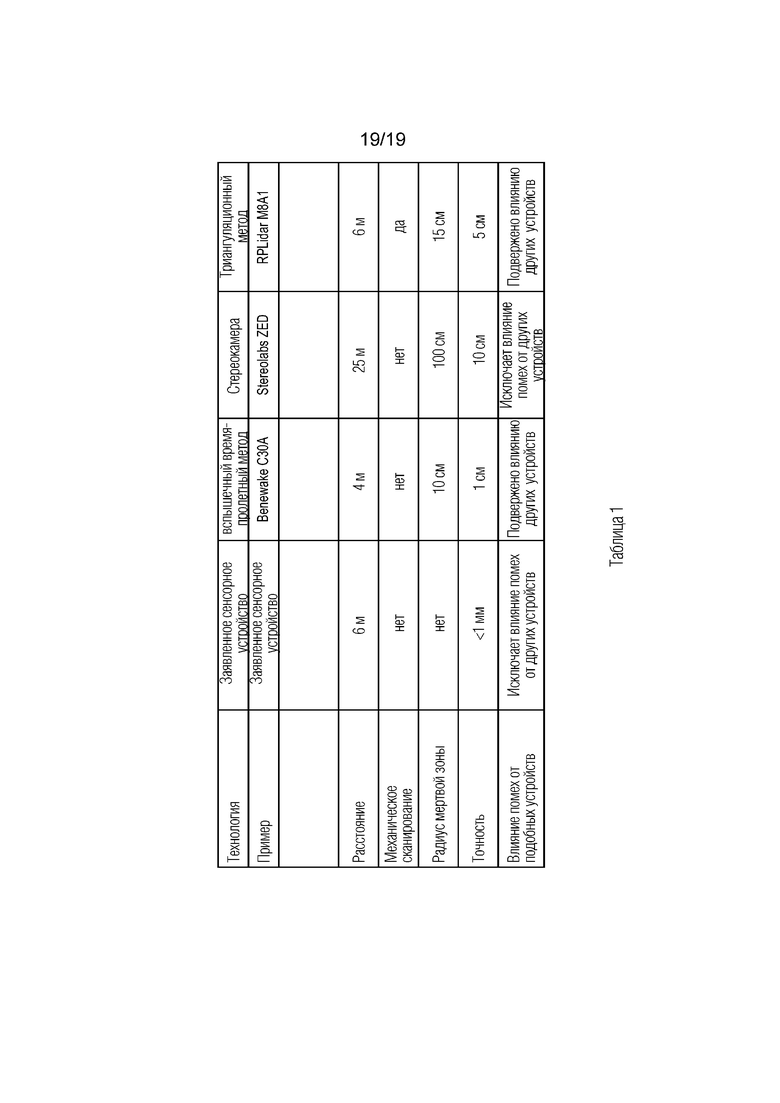
Таблица 1-представлены результаты полученных исследований параметров заявленного сенсорного устройства и подобных устройств известных из уровня техники.
Подробное описание предпочтительного варианта осуществления изобретения
Настоящее изобретение предназначено для обеспечения оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объекта. Принцип работы заявленного оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объекта согласно изобретению, основан на гетеродинном методе измерения, хорошо известном из уровня техники (см., например Jacobs, Stephen (30 November 1962). Technical Note on Heterodyne Detection in Optical Communications (PDF) (Report). Syosset, New York: Technical Research Group, Inc.), и основан на сравнении частоты исследуемого светового сигнала с частотой сигнала локального осциллятора-лазера. На фиг.1 представлена общая схема гетеродинного метода измерения, световой сигнал, представляющий собой генерируемое электрическое поле, описываемое, как (E1cos(ω1t)), и колеблющееся с очень высокой частотой, который отразился от объекта и сигнал от гетеродина или локального осциллятора(лазер), представляющего собой электрическое поле, описываемое, как (E2cos(ω2t)), с очень высокой частотой с помощью разделителя луча сводятся на фотодиоде, где измеряется фототок. Фотодиод служит идеальным квадратичным детектором, так как он измеряет оптическую мощность, которая пропорциональна квадрату электрического поля. При этом если частоты светового сигнала и сигнала от осциллятора незначительно различаются (порядка кГц или МГц) фотодиод определит эту разностную частоту.
При этом ток (I), проходящий через фотодиод пропорционален квадрату результирующего электрического поля:
(1)

где
I-результирующий ток фотодиода, вызванный падением на него одновременно локального и измерительного лучей,
E1-напряженность электрического поля для светового сигнала,
Е2-напряженность электрического поля для локального осциллятора,
ω1 -частота электрического поля для светового сигнала
ω2- частота электрического поля для сигнала локального осциллятора
t-время.
После ряда преобразования получаем следующее соотношение (2), характеризующее ток(I), проходящий через фотодиод:
(2)

Ток(I), проходящий через фотодиод определяется двумя компонентами: первая компонента (левая квадратная скобка) представляет собой сумму мощностей светового сигнала и сигнала осциллятора и сигнал, колеблющийся на разностной частоте (равной разности двух частот, а именно частот светового сигнала и сигнала осциллятора), а вторая компонента (правая квадратная скобка) представляет собой сигналы, колеблющееся на очень высоких частотах (выше оптических) и, следовательно, не обнаруживаемые фотодиодом. Левая компонента представляет собой следующее соотношение:
(3)

Где компонента  +
+ отфильтровывается с использованием фильтра верхних частот, а компонента E1E2 cos(Δωt) характеризует гетеродинный сигнал, характеризующий разность частот, который и детектируется на фотодетекторе.
отфильтровывается с использованием фильтра верхних частот, а компонента E1E2 cos(Δωt) характеризует гетеродинный сигнал, характеризующий разность частот, который и детектируется на фотодетекторе.
Изменяя линейно со временем частоту лазера (т.е. частоту излучаемого лазером электромагнитного поля) можно получить линейную зависимость разницы двух частот Δω (а именно частот светового сигнала и сигнала осциллятора)(Гц) от расстояния до объекта, отразившего световой сигнал.
(4)
, где L - расстояние до объекта(м), с - скорость света(м/cек), α - скорость перестройки частоты лазерного излучения (Гц/с)
Таким образом, расстояние до объекта и частота сигнала гетеродина оказываются линейно связаны и, определив частоту сигнала гетеродина, можно вычислить расстояние до объекта, отразившего световой сигнал:
(5)
Таким образом, ток через фотодиод будет представлять собой сумму гармонических сигналов, причем для каждого гармонического сигнала частота этого сигнала будет определять расстояние до отразившего свет объекта, а амплитуда этого гармонического сигнала будет определять коэффициент отражения этого объекта. Для спектрального анализа тока фотодиода (т.е. для определений частот и амплитуд составляющих его гармонических сигналов) может быть применен метод быстрого преобразования Фурье
Далее представлены предпочтительные варианты реализации и Примеры оптического сенсорного устройства со ссылками на фиг. 2а и 2b, 2с, 2d и 2f.
На фиг. 2а представлена схема оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов (далее, как сенсорное устройство), содержащего по меньшей мере один источник (11…1n) лазерного излучения (далее, как лазер), в частности поверхностно-излучающий лазер с вертикальным резонатором (VCSEL), работающий в диапазоне длин волн около 700-950нм, выполненный с возможностью оперативного регулирования параметров излучения посредством соответствующего по меньшей мере одного драйвера (21…2n) по сигналу от главного контроллера 9. При этом для каждого из по меньшего одного источника (11…1n)лазерного излучения предусмотрена соответствующая по меньшей мере одна коллимирующая оптика (31…3n), например в виде по меньшей мере одной коллимирующей микролинзы, расположенной над источниками (11…1n) лазерного излучения, светоделительное средство 4, например светоделительный куб 4 с полуотражающим зеркалом (не показано), расположенным внутри указанного куба, и выполненный с возможностью разделения луча на опорный и измерительный лучи. Кроме того светоделительный куб 4 содержит светоотражающее средство 5, выполненное в виде светоотражающей поверхности, расположенной на внешней или внутренней поверхности боковой грани светоделительного куба 4 или в виде зеркала 5(см. фиг.2с), расположенного перед боковой гранью светоделительного куба 4. Сенсорное устройство также содержит оптическое средство 6 направления луча, выполненное с возможностью направления по меньшей мере одного коллимированного пучка излучения в предварительно заданном направлении, при этом при одновременном функционировании нескольких источников (11…1n) лазерного излучения оптическое средство 6 направления луча отклоняет каждый из испускаемых лазерных пучков в предварительно заданном направлении, при этом оптическое средство (6) направления луча представляет собой линзу, имеющую плоскую поверхность со стороны, обращенной к светоделительному кубу 4 , а со стороны обращенной к объекту имеет поверхность, состоящую из по меньшей мере одной микролинзы, при этом каждая из по меньшей мере одной микролинзы соответствует по меньшей мере одному источнику лазерного излучения. При этом каждая из по меньшей мере одной микролинзы расположена под заданным углом к соответствующему падающему лазерному лучу и выполнена таким образом, чтобы соответствующий лазерный луч после прохождения через микролинзу был направлен в требуемом заданном направлении.
На фиг.8 представлен пример оптического средства (6) направления луча в виде линзы с полем зрения 17×17 градусов и количеством оптических микролинз или линзовых микроэлементов 25 (5×5), каждый отвечающий за направление одного лазерного луча в заданную точку объекта или оптическое средство направления луча может быть выполнено в виде по меньшей мере одной микролинзы (61…6n) (cм. Фиг. 2d).
При этом в состав сенсорного устройства также входит по меньшей мере один детектор (71…7n), выполненный с возможностью детектирования испускаемого лазерного излучения и подсоединенный через по меньшей мере один преобразователь(81…8n) с главным контроллером 9, включающим процессор данных. При этом согласно фиг.2а в качестве одного варианта реализации, источники (11…1n) лазерного излучения образуют двухмерную матрицу излучателей, коллимирующая оптика (31…3n) образует двухмерную матрицу микролинз, а детекторы (71…7n) образуют двухмерную матрицу детекторов.
На фиг. 2b представлена схема оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов согласно фиг.2а, в которой штрих-пунктирной линий выделен один измерительный канал, формируемый парой: один из источников (11…1n) лазерного излучения и один из детекторов (71…7n). При этом каждый из источников (11…1n) лазерного излучения с соответствующим драйвером из драйверов (21…2n) и каждый из детекторов из детекторов (71…7n) с соответствующим преобразователем из преобразователей (81…8n), образуют индивидуально функционирующий и индивидуально настраиваемый рабочий канал, при этом все указанные каналы могут работать одновременно или выборочно, в зависимости от управляющего сигнала, поступающего от главного контроллера (9).
На фиг. 2с представлена схема сенсорного устройства, которая полностью повторяет схему сенсорного устройства согласно фиг.2а и 2b, за исключением расположения зеркала 5 не на боковой грани светоделительного куба 4, а вынесенного перед его боковой гранью. При этом функционирование сенсорного устройства согласно фиг. 2с полностью повторяет работу устройства по фиг.2а и 2b.
На фиг. 2d представлена схема сенсорного устройства, которая полностью повторяет схему сенсорного устройства согласно фиг.2а и 2b, за исключением выполнения оптического средства 6 направления луча, которое представляет собой матрицу микролинз(61…6n), при этом каждая из микролинз (61…6n) обеспечивает направление лазерного луча в заданную точку объекта. При этом функционирование сенсорного устройства согласно фиг. 2d полностью повторяет работу устройства по фиг.2а и 2b.
На фиг. 2e представлена схема сенсорного устройства, которая полностью повторяет схему сенсорного устройства согласно фиг.2а и 2b, за исключением добавления в схему оптического изолятора 10, представляющего собой оптический элемент, обеспечивающий прохождение лазерного луча только в одном направлении, а именно от источника лазерного излучения 1 к светоделительному средству 4, и расположенного между светоделительным средством 4 и по меньшей мере одним оптическим коллимирующим средством(31..3n), и выполненный с возможностью предотвращение попадания, отраженного от объекта света на по меньшей мере один источник (11..1n), лазерного излучения и предотвращения дестабилизации функционирования указанных источников. При этом функционирование сенсорного устройства согласно фиг. 2e полностью повторяет работу устройства по фиг.2а и 2b.
На фиг. 2f представлена схема сенсорного устройства, которая полностью повторяет схему сенсорного устройства согласно фиг.2а и 2b, только в схему вводится призма 11, за счет чего опорный и измерительные лучи после выхода из светоделительного куба 4 попадают на призму 11 и отразившись от ее внутренней поверхности перенаправляются на соответствующий детектор (71..7n), и за счет такой траектории прохождения луча обеспечивается более оптимальная компоновка элементов сенсорного устройства, что позволяет разместить источники (11..1n)лазерного излучения с драйверами (21..2n), и детекторы (71..7n), на одном чипе. Такая компоновка сенсорного устройства на одном чипе позволяет добиться значительного уменьшения размеров сенсорного устройства, что играет определяющую роль его использования в мобильных сенсорных средствах. На фиг.2f опущена часть схемы, иллюстрирующая преобразователи и главный контроллер, но она полностью повторяет схему фиг.2а и 2b. При этом функционирование сенсорного устройства согласно фиг. 2f полностью повторяет работу устройства по фиг.2а и 2b.
При этом следует отметить, что все оптические элементы (источники лазерного излучения, коллимирующие средства, светоделительное средство оптическое средство направления луча, детекторы и другие оптические элементы), входящие в состав сенсорного устройства и представленные на фиг.2а-2f, оптически сопряжены друг с другом.
Сенсорное устройство согласно изобретению (cм. Фиг.2а-2f) работает следующим образом: лазерное излучение с предварительно заданной длиной (700-950 нм) волны испускается по меньшей мере одним из источников (11…1n) лазерного излучения, проходит через по меньшей мере одну из коллимирующих микролинз (31…3n), и попадает на светоделительный куб 4, где часть излучения -опорный луч (обозначен пунктирной линией на фиг. 2а-2f) отражается от полупрозрачного зеркала (не показано) внутри светоделительного куба 4 и попадает на отражающую поверхность 5 (фиг.2а) или зеркала 5 (см. фиг. 2с) светоделительного куба 4, отразившись от которой попадает на соответствующий по меньшей мере один детектор (71…7n), а вторая часть излучения-измерительный луч (обозначен сплошной линией на фиг. 2а-2f) проходит через светоделительный куб 4 и попадает на оптическое средство 6 направления луча, выполненное с возможностью направления указанного измерительного луча под заданным углом на исследуемый объект, где отразившись от него отраженный измерительный луч проходит средство 6 направления луча и светоделительный куб 4 и попадает на соответствующий детектор из детекторов (71…7n), где происходит измерения разности частот Δω, от двух сигналов, образованных опорным и измерительным лучом согласно гетеродинному методу измерения, описанному выше.
Описанная на фиг.2а-2f, схема сенсорного устройства согласно изобретению обеспечивает работу каждой пары, образующей измерительный канал, например источник (11) лазерного излучения (эммитер) и детектор (71) в фиксированном направлении по направлению к точке объекта. Таким образом, объект, подлежащий исследованию, сканируется одновременно, и каждая пара: эммитер-детектор нацелена на одну свою определенную точку, расположенную на объекте, сенсорное устройство охватывает таким образом все поле зрения. При этом каждый измерительный канал, образованный соответствующей парой-эммитер и детектор (cм. фиг.2b, выделено штрих-пунктирной линией), работает независимо от других каналов, но при этом сканирование объекта источниками (11…1n) лазерного излучения и детекторами (71…7n) выполняется одновременно. Благодаря такой схеме сенсорного устройства расстояние до объекта и скорость объекта(объектов) измеряется в одно и тоже время (t), что повышает точность получаемых параметров и высокую скорость работы сенсорного устройства согласно изобретению.
Благодаря этому, не возникает эффект нечеткости или размытия изображения движущегося объекта, поскольку дистанция до объекта измеряется в один и тот же момент времени, в отличие от традиционных устройств измерения дальности (лидаров), где при сканировании объекта, каждая последующая точка объекта, на который падает луч смещена на некоторое Δt и на некоторое расстояние Δs , чем обусловлено возникновение искажений изображения объекта, которое наглядно видно на фиг. 3а, где представлено несколько искаженное изображение объекта в виде черного кота. При этом такое же изображение на фиг. 3b демонстрирует четкое изображение, поскольку все точки объекта сканируются одновременно по всему полю зрения. Высокая скорость работы описываемого сенсорного устройства обеспечивается за счет проведения измерения во всем поле зрения одновременно и отсутствии механических вращающихся частей, ограничивающих скорость в классических лидарах.
Работа оптического сенсорного устройства определения дальности, скорости и идентификации формы и структуры объектов согласно изобретению основана на принципе непрерывного излучения с частотной модуляцией(FMCW), что позволяет регулировать разрешение по длине и частоту кадров «на лету», т.е. во время функционирования сенсорного устройства, не внося конструктивных изменений непосредственно в само устройство, а лишь изменяя рабочие параметры источников (11…1n) лазерного излучения, а именно ток, подаваемый в источники (11…1n) лазерного излучения через драйверы (21…2n) по сигналу от главного контроллера (9).
Одним из параметров, определяемым заявленным сенсорным устройством является оперативное разрешение (Res) по дальности.
При этом, авторы провели экспериментальные исследования, при которых в сенсорном устройстве согласно изобретению амплитуда модуляции тока накачки, подаваемая на источники (11…1n) лазерного излучения, составляла 3мА (ток накачки менялся от 3 мА до 6 мА), при этом разрешение по дальности составляло 0.25 мм , а при амплитуде модуляции тока 1мА (ток накачки менялся от 4 мА до 5 мА) разрешение по дальности составляло 0,75 мм. В обоих случаях изменение значения тока, подаваемого на источники лазерного излучения позволяло регулировать разрешение по дальности до объекта. При этом длина волны источников лазерного излучения составляла 850 нм.
Аналогичные исследования были проведены и при длине волны источников лазерного излучения равной 780 нм. При этом амплитуда модуляции тока накачки, подаваемый на источники (11…1n) лазерного излучения, составлял 40мА (ток накачки менялся от 80 мА до 120 мА), при этом разрешение по дальности составляло 6 мм, а при амплитуде модуляции тока 10 мА (ток накачки менялся от 100 мА до 110 мА) разрешение по дальности составляло 25 мм. В обоих случаях изменение значения тока, подаваемого на источники лазерного излучения, позволяло регулировать разрешение по дальности до объекта.
Разрешение (Res) по дальности может быть вычислено как:
(6)
Res (6)
c- скорость света (м/cек),
Ώ-зависимость частоты излучаемого лазерного света в зависимости от тока, накачиваемого в по меньшей мере один источник (11…1n) лазерного излучения (далее, как лазер) (Гц/мА),
dI- амплитуда модуляции тока источника лазерного излучения в процессе сканирования объекта (мА)(т.е. перестройка источника лазерного излучения по току в процессе сканирования объекта.
Изменяя амплитуду модуляции тока (dI) в процессе сканирования объекта имеется возможность изменять оперативно разрешение по дальности.
На графиках 4а и 4b наглядно продемонстрированы графики, иллюстрирующие зависимость разрешения по длине от тока, а на фиг. 5а и 5b графики, иллюстрирующие зависимость частоты кадров от тока накачки лазера для случаев высокой и средней частоты кадров (т.е. количества измерений в единицу времени), где на фиг. 4а показана зависимость тока накачки источника лазерного излучения (лазера) от времени, при которой реализуется среднее разрешение определения расстояния (примерно 3 мм) и на фиг. 4b зависимость тока накачки источника лазерного излучения (лазера) от времени, при которой реализуется высокое разрешение определения расстояния (примерно 0.25 мм). При этом на фиг. 5а показана средняя скорость сканирования, а на фиг. 5b-высокая скорость сканирования. По ординате указано значение тока, подаваемого в источник лазерного излучения(мА), а по абсциссе-время (сек). На указанных графиках один период соответствует одному измерению. Из указанных графиков видно, что чем быстрее сигнал повторяется, тем выше частота кадров. Чем выше амплитуда сигнала (т.е. размах между минимумом и максимумом), тем выше точность определения расстояния.
Поскольку заявленное сенсорное устройство основано на принципе непрерывного излучения с частотной модуляцией(FMCW), помимо определения дальности до объекта оно может идентифицировать параметры самого объекта, т.к. заявленное сенсорное устройство способно выдавать данные распределения коэффициентов отражения в зависимости от структуры поверхности объекта.
Классические оптические устройства определения дальности (лидары), основанные на время-пролетном принципе в качестве «сырых», т.е. не подвергающихся обработке, данных возвращают по каждому направлению одну точку, которая соответствует времени полета света до объекта, от которого отразился свет обратно в лидар. В отличие от традиционных время-пролетных лидаров, заявленное устройство обеспечивает в качестве «сырых» (необработанных) данных информацию распределения коэффициента отражения по каждому лучу, в зависимости от дистанции, отразившемуся от объекта.
На фиг. 6а, 6b представлены графики, на которых наглядно продемонстрирован этот принцип работы.
На фиг. 6а представлена схема расположения прозрачных и непрозрачных объектов на пути следования луча, испускаемого источником лазерного излучения (лазер), а на фиг. 6b проиллюстрировано распределение коэффициентов отражения, получаемых при прохождения лазерного луча через прозрачные или непрозрачные объекты. Как видно из фиг. 6а на пути следования лазерного луча расположены два прозрачных окна(стеклянные пластины) и далее расположен достаточно протяженный непрозрачный объект, например стена.
Лазерный луч, испускаемый из источника (11….1n) лазерного излучения(лазер), проходит через, расположенные по пути следования луча, два прозрачных окна (две тонкие стеклянные пластины), которые пропускают большую часть излучения ( 90%) , а незначительная часть излучения (5-10%) рассеивается или отражается при прохождении через указанные прозрачные объекты. Соответственно на фиг. 6b изображены два маленьких пика, характерные для отраженного от прозрачных объектов луча и один большой пик, характерный для луча, практически полностью отраженного от стены. Как видно из графика амплитуды пиков пропорционально коэффициенту отражения светового сигнала (т.к. отражения от объектов на различном расстоянии приведет к сигналу от фотодетектора на разных частотах, которые могут быть легко различены согласно формуле (4)).
90%) , а незначительная часть излучения (5-10%) рассеивается или отражается при прохождении через указанные прозрачные объекты. Соответственно на фиг. 6b изображены два маленьких пика, характерные для отраженного от прозрачных объектов луча и один большой пик, характерный для луча, практически полностью отраженного от стены. Как видно из графика амплитуды пиков пропорционально коэффициенту отражения светового сигнала (т.к. отражения от объектов на различном расстоянии приведет к сигналу от фотодетектора на разных частотах, которые могут быть легко различены согласно формуле (4)).
Таким образом, по указанным графикам можно судить о типе объектов, находящихся на пути распространения луча из источника лазерного излучения, т.е. два малых пика-маленькое отражение от прозрачного объекта(стекло) и один большой пик (большое отражение от непрозрачного объекта(стены).
Далее, когда сигнал преобразуется из частоты в расстояние, т.е. в метры, можно сделать вывод, что по ходу луча располагаются два объекта, которые мало отражают свет обратно в сенсорное устройство (т.е. прозрачные объекты) и за ними расположен один объект, с высоким коэффициентом отражения(большой пик), света от этого объекта (т.е. стена) обратно в сенсорное устройство.
Таким образом, такая функция сенсорного устройства согласно изобретению, позволит повысить качество навигации внутри пространства дома или другого пространства, поскольку классические время-пролетные лидары смогут распознать только сильно отражающие объекты и не способны различить объекты с малым коэффициентом отражения (прозрачные или полупрозрачные объекты).
Заявленное сенсорное устройство способно также распознавать или идентифицировать характеристические признаки поверхности прозрачных и непрозрачных объектов через которые распространяется и/или отражается луч, испускаемый из по меньшей мере одного источника (11…1n) лазерного излучения. При этом распознавание или идентификация структуры, или материала объекта может выполняться на основании распределения коэффициентов отражения вдоль траектории луча.
На фиг. 7а представлен пример расположения объекта, представляющего собой ткань, на фиг. 7b представлен вид структуры ткани с более плотным «слоем» внутри ткани и на фиг. 7с представлена схема распределения коэффициента отражения, вдоль хода лазерного луча, соответствующая примеру расположения объекта, представляющего собой ткань. На фиг.7а представлена схема, иллюстрирующая распространение луча, испускаемого из по меньшей мере одного источника (11…1n) лазерного излучения (лазер) через достаточно протяженный объект (например, ткань) по ходу распространения луча, где каждый объект можно условно разделить на слои, в данном случае послойное разделение куска ткани наглядно изображено на фиг. 7b и каждый слой объекта по его протяженности вносит свой вклад в отражение. При этом полезный сигнала, проходящий и/или отраженный от объекта в данном случае повторяет картину отражения или рассеяния объекта. В общем случае, каждый слой материала объекта будет отражать луч и проявлять себя как сигнал, характеризующий отражательную способность по ходу следования луча, что наглядно видно на фиг.7с, где более высокий пик соответствует более высокому коэффициенту отражения внутреннего слоя ткани.
Таким образом по распределению отражательной способности объекта можно судить о природе материала из которого выполнен объект.
Объекты с высокой отражательной способностью, например бетонные стены, металлические предметы и т. д, отражают практически 100% света от своей поверхности, что дает узкий пик в спектре сигнала.
Объекты с низкой отражающей способностью, например предметы из стекла, кожи, ткани и т.д., отражают часть света от поверхности, а также больше света отражается от подповерхностных областей, когда свет проникает в материал. Это дает широкий, неровный пик. Анализируя форму пика, т.е. ширину и высоту, можно оценить тип материала протяженного объекта. Этот наглядно продемонстрировано на графике фиг. 7с, характеризующий распределение отражательной способности сигнала, отраженного от ткани.
Таким образом заявленное сенсорное устройство выполнено с возможностью обеспечения высокого разрешения изображения движущегося объекта в сочетании с обнаружением множественных отражений вдоль пути луча, что позволяет дифференцировать целевой объект в зависимости от того, как целевые объекты отражают луч от источника лазерного излучения.
Авторы провели ряд экспериментальных исследований и классифицировали картины распределения отражательной способности некоторых целевых объектов: стекла, бетона(кирпича), ткани. Таким образом по профилю пиков, характерных для сигнала отражения для различных материалов объектов, можно распознать материалы, из которых выполнены объекты и их форму.
На фиг. 9а, 9b, 9c и 9d представлены графики, иллюстрирующие распределение отражательной способности в зависимости от материала объектов (пластик, кожа, ткань, стекло), где по оси ординат в условных единицах обозначена отражательная способность (отражение), а по оси абсцисс расстояние в мм (т.е. расстояние от сенсорного устройство до объекта, которое в ходе эксперимента было примерно 150 мм).
На фиг.9а представлен график, иллюстрирующий сигнал, полученный при использовании в качестве объекта пластиковой пластинки. При этом на графике можно заметить большую высоту пика сигнала и малую ширину.
На фиг.9b представлен график, иллюстрирующий сигнал, полученный при использовании в качестве объекта кожи ладони человека. При этом на графике можно заметить: низкую высоту пика структуры (более пологую часть пика справа, говорящую о проникновении света под поверхность и отражающуюся от глубинных слоев объекта), существенную ширину.
На фиг.9с представлен график, иллюстрирующий сигнал, полученный при использовании в качестве объекта ткани (медицинской маски). При этом а графике можно заметить: низкую высоту пика, структуру пика (видно, что он состоит из двух рядом расположенных максимумов) и существенную ширину.
На фиг.9d представлен график, иллюстрирующий сигнал, полученный при использовании в качестве объекта стеклянной пластинки толщиной 20 мм. При этом а графике можно заметить: большую высоту пика, малую ширину и наличие двух пиков (это явно говорит об отражении от двух поверхностей, расположенных друг за другом - в данном случае от передней и задней поверхности стеклянной пластинки).
Представленные на фиг.9а-9d, в виде графиков, экспериментальные данные, наглядно иллюстрируют существенные отличия формы сигналов в зависимости от материала (структуры) отражающего объекта. Форма сигнала может быть использована, как исходные данные для алгоритма распознавания типа материала.
Полученные экспериментальные данные используются для настройки алгоритма машинного обучения, предназначенного для классификации результатов данных отклика, полученных на детекторах (71..7n) и поступающих на главный контроллер 9 (далее, контроллер), где осуществляется классификация полученных данных отклика от объекта на основе предварительно настроенного алгоритма главного контроллера 9, на основе которой выводится результат о структуре и форме объекта.
Заявленное сенсорное устройство также выполнено с возможностью измерения скорости каждой точки объекта, которая измеряется одновременно с дистанцией до объекта, в отличие от известных из уровня техники лидаров, где скорость определяется на основании местоположения объектов на двух последующих кадрах (под «кадром» в данном случае понимается одно измерение расстояний до объекта в поле зрения устройства, выполненное одновременно).
При движении объекта, свет, отражающийся от него, испытывает сдвиг частоты из-за эффекта доплера. Это сдвиг описывается формулой:
(7)
 ,
,
где ω0 - частота падающего света(Гц), V - скорость объекта(м/c), с - скорость света(м/с).
Таким образом, разница частот источника лазерного излучения и измерительного сигнала оказывается равной:
(8)
где ω0 - частота падающего света(Гц), V - скорость объекта(м/с), с - скорость света(м/с), L - расстояние до объекта(м), α - скорость нарастания частоты излучения (Гц/с), т.е. скорость измерения мгновенной частоты испускаемого источником лазерного излучения(лазер).
Например, если лазер изменяет свою длину волны с 852 нм (частота=352.1 ТГц) до 850 нм (частота=352.9 ТГц) за время 0.1 секунды, то скорость нарастания частоты оказывается равной  .
.
Из формулы (8) видно, что на измеряемую частоту сигнала фотодетектора влияет как расстояние (L) до объекта, так и скорость объекта (V). Чтобы иметь возможность отдельно измерить скорость и расстояние до объекта, предлагается провести два измерения последовательно друг за другом: сначала, когда скорость нарастания частоты равна α, а затем - когда скорость нарастания частоты равна -α. (т.е. частота падает со временем).
При этом во время нарастания частоты будет измерена частота Δw1:
(9)
где Δω1 -разность частот сигналов, сформированных измерительным и опорными лучами при нарастании частоты излучения (Гц), ω0 - частота падающего света(Гц), V - скорость объекта(м/с), с - скорость света(м/с), L - расстояние до объекта(м), α - скорость нарастания частоты излучения (Гц/с).
А во время спада частоты будет измерена частота Δw2:
(10)
где Δω2 -разность частот сигналов, сформированных измерительным и опорными лучами при спаде частоты излучения (Гц), ω0 - частота падающего света(Гц), V - скорость объекта(м/с), с - скорость света(м/с), L - расстояние до объекта(м), α - скорость нарастания частоты излучения (Гц/с)
Таким образом, расстояние до объекта L и его скорость V могут быть вычислены по формуле:
(11)
Эти вычисления могут быть выполнены в главном контроллере (9).
Основные эффекты заявленного устройства
Заявленное сенсорное устройство обеспечивает одновременное измерение расстояния до объекта, скорость движения объекта, а также форму и структуру объекта, например материал из которого выполнен указанный объект.
Указанное заявленное устройство представляет собой компактный датчик, предназначенный для использования в маленьких роботах и других бытовых приборов, как внутри дома, так и вне его.
Кроме того, указанное сенсорное устройство характеризуется высокой надежностью, поскольку его конструктивное выполнение не предусматривает наличие движущихся механических частей или деталей. Как уже указывалось в описании в основу работы сенсорного устройства положен интерферометрический способ, что способствует возможности работы заявленного устройства как внутри дома, так и вне дома рядом с источниками яркого света и другими лидарами, поскольку указанный интерферометрический метод предусматривает детектирование только света, излучаемого самим сенсорным устройством и не реагирует на другие источники излучения, например яркие лампы, солнце, луна и другие источники излучения, т.е. нет проблем с засветками от других потенциальных источников излучения.
Заявленное сенсорное устройство позволяет одновременно определять, как расстояние до объекта, так и его скорость, что позволяет использовать новые алгоритмы для навигации. Кроме того, заявленное устройство позволяет получить данные (FMCW сигнал), которые после некоторой обработки характеризуют структуру объекта.
Кроме того, в заявленном сенсорном устройстве обеспечивается оперативное изменение параметров лазерной модуляции сенсорного устройства. Например, для увеличения частоты кадров необходимо увеличить частоту модуляции тока (по сигналу от главного контроллера 9), а для улучшения разрешения необходимо увеличить амплитуду модуляции тока накачки (по сигналу от главного контроллера 9), что приведет к большей амплитуде модуляции длины волны. Указанные возможности сенсорного устройства согласно изобретению позволяют оперативно менять функцию устройства, например сенсорное устройство может работать для целей навигации при функционировании с бытовым пылесосом, но при необходимости, легко можно перестроить работу устройства на малое количество точек сканирования объекта, но с более высоким разрешением и высокой частотой кадров, что обеспечивает его работу в качестве датчика жестов ( в данном случае по сигналу управления от главного контроллера 9 сокращается количество одновременно функционирующих источников лазерного излучения(по сравнению с предыдущим случаем), но увеличивается амплитуда модуляции тока, подаваемого на указанные источники (11…1n) лазерного излучения, что повышает разрешение изображения объекта и скорость кадров), в случае попеременного режима работы источников (11…1n) лазерного излучения, обеспечивается работа сенсорного устройства как 3-ех мерного сканера. Таким образом, заявленное устройство позволяет оперативно менять свой режим работы в зависимости от поставленной задачи пользователя.
В общем случае выходными данным от сенсорного устройства является распределение отражающих и рассеивающих свет объектов (с их формой) в окружающем пространстве.
Для работы в режиме датчика жестов сенсорное устройство может перейти в режим c более высокой частотой кадров (например, если в обычном режиме сенсорное устройство работает с частотой 10 кадров/сек, то в режиме датчика жестов оно функционирует с частотой 50 кадров/сек), более высоким разрешением (например, если в обычном режиме сенсорное устройство работает с разрешением в 5 мм, то в режиме датчика жестов оно функционирует с разрешением 0.2 мм) и более узким полем зрения (например, если в обычном режиме сенсорное устройство работает с полем зрения 50°, то в режиме датчика жестов оно функционирует с полем зрением 15°, путем сокращения числа опрашиваемых фотодетекторов). При этом реализуется оптимальное соотношения параметров для получения изображения жеста пользователя.
Для работы в режиме трехмерного сканера сенсорное устройство может перейти в режим с низкой частотой кадров (например, если в обычном режиме сенсорное устройство работает с частотой 10 кадров/сек, то в режиме трехмерного сканера оно функционирует с частотой 1 кадр/сек), высоким разрешением (например, если в обычном режиме сенсорное устройство работает с разрешением в 5 мм, то в режиме трехмерного сканера оно функционирует с разрешением 1 мм) и большим углом зрения (например, если в обычном режиме сенсорное устройство работает с полем зрения 50°, то в режиме трехмерного сканера оно функционирует с полем зрения 70°, путем включения всех доступных фотодетекторов). При этом реализуется оптимальное соотношения параметров для получения трехмерного изображения объекта, а скорость сканирования не играет существенной роли.
Авторы изобретения провели ряд исследований параметров подобных устройств определения расстояния, используемых в бытовых целях и указанные исследования наглядно продемонстрировали преимущества заявленного сенсорного устройства по сравнению с известными подобными устройствами известными на рынке.
Были рассмотрены следующие устройства:
(1) оптическое сенсорное устройство для определения расстояния до и скорости объектов и для распознавания его формы и структуры или материала, из которого выполнены указанные объекты(далее, как сенсорное устройство) согласно изобретению;
(2) вспышечный время-пролетный лидар (Benewake C30A);
(3) стереокамера(Stereolabs ZED) и
(4) лидар, работающий по методу триангуляции(RPLidar M8A1).
Исследования проведены по следующим критериям: 1) определяемое расстояние, 2) использование механического сканирования, 3) радиус мертвой зоны, 4) точность, 5) интерференция другими сенсорами. В таблице 1 наглядно продемонстрированы результаты полученных исследований.
Критерий 1) Все исследуемые устройства работают примерно с расстоянием одного порядка, за исключение стереокамеры, функционирующей с возможностью измерения расстояния до 25 м.
Критерий 2) Все исследуемые устройства за исключением лидара, работающего по методу триангуляции (RPLidar M8A1) не требуют механического сканирования.
Критерий 3) Все исследуемые устройства имеют некоторую мертвую зону, при которой они не могут работать: у время-пролетного лидара (2) такая зона составляет 10 см, поскольку на этой дистанции интенсивность излучения слишком велика и сенсор засвечивается, стереокамера (3) работает за счет стереоэффекта, обеспечиваемого двумя камерами, разнесенными на определенное расстояние, называемое стереобазой (обычно - несколько десятков сантиметров). При этом для наблюдения стереоэффекта необходимо, чтобы наблюдаемый объект попал в поле зрения обеих камер. Т.к. поле зрения камер ограничено, область стереоскопического зрения стереокамеры также ограничена. Минимальное расстояния для работы при этом составляет сравнимую со стереобазой величину - т.е. несколько десятков сантиметров.
Для лидара (4) (RPLidar M8A1) для его функционирования требуется минимальное расстояние около 15 см между излучателем и приемником, меньше которого он не способен функционировать. При этом для заявленного оптического сенсорного устройства (1) в силу его гетеродинного принципа работы практически не существует мертвая зона, поскольку измерение расстояние основано на измерениях разности частоты между испущенным и принятым светом, и нулевой частоте будет соответствовать нулевая разница, т.е. нулевая дистанция, т.е. отсутствие мертвой зоны является существенным преимуществом заявленного сенсорного устройства.
Критерий 4) заявленное сенсорное устройство согласно изобретению продемонстрировало более высокое разрешение при измерении расстояния (менее 1 мм) в отличие от других устройств.
Критерий 5) заявленное устройство (1) полностью исключает влияние помех от других устройств, поскольку основано на гетеродинном методе, устройства (2) и (4) подвержены влиянию других излучающих устройств, что может вызвать ошибки в измерениях, а стереокамера (3) не подвержена влиянию других излучающих устройств, поскольку является ничего не излучающим пассивным прибором.
Таким образом из Таблицы 1 наглядно видно, что заявленное устройство (1) характеризуется высокой точностью (менее 1мм), высокой надежностью(отсутствие механических движущихся частей) и полностью не подвержено влиянию помех от других излучающих устройств благодаря гетеродинному принципу работы.
Авторы провели экспериментальные исследования по идентификации формы и структуры объектов с помощью заявленного сенсорного устройства, см. фиг.10.
На фиг.10 по углам представлены фотоснимки секторов 1-4 экспериментальной лаборатории, а в центре фигуры расположен темный круг, в центре, которого расположено заявленное сенсорное устройство, формирующее карту навигации, построенную компьютером на основе данных, полученных от контроллера (9). На темном круге четко просматриваются по секторам большие участки (отрезки прямых линий), соответствующие стенам и прерывистыми линиями небольшие участки, соответствующие мелким предметам: шкафчики, полки, ноутбуки.
При этом на фиг.11 в увеличенном виде представлены детали изображений с фиг.10, где с левой стороны рисунка представлены фотоснимки отдельных элементов лаборатории, сверху слева на фотоснимке изображены порожки стены, которые отображены на соответствующей картинке карты навигации справа, где наглядно просматриваются порожки стены. Фотоснимок в середине слева показывает мелкие детали и как они отображаются на карте навигации, при этом разрешение достигает 6мм. На нижнем фотоснимке слева изображен куб из органического стекла, а справа четко просматриваются его передние и задние грани.
Таким образом, авторы наглядно продемонстрировали возможность заявленного сенсорного устройства распознавать форму и структуру объектов в помещении.
Авторы провели экспериментальные исследования по точности измерения скорости движущегося объекта с помощью заявленного сенсорного устройства (см. фиг.12). Пластиковую пластину в качестве движущегося объекта помещают на линейный двигатель, способный развивать скорость от 5 мм/сек до 500 мм/сек. Напротив объекта , расположенного на линейном двигателе размещают заявленное сенсорное устройство согласно фиг.2а, 2b При запуске линейного двигателя пластиковая пластинка движется со скоростью 5, 16 мм/сек, при этом измеренная заявленным сенсорным устройством скорость пластины составляет 5, 27 мм/сек, т.е. ошибка измерений составляет +2,1% , когда линейный двигатель развивает скорость 499,2 мм/сек, ошибка измерений значительно уменьшается, в данном случае измеренная скорость составляет 495, 45 мм/сек, т.е. ошибка составляет -0,8%.
Таким образом, экспериментальные исследования, проведенные авторами, показали высокую точноcть измерений скорости объекта.
Промышленная применимость
Оптическое сенсорное устройство, согласно изобретению выполнено с возможностью определения расстояния до объекта, скорости объекта, а также структуры объекта и материала, из которого выполнен объект и может использоваться в сенсорах для целей навигации, используемых для мобильных электронных устройств, компактных переносных устройствах, как для бытовых целей, например пылесосах, и в других бытовых приборах для расширений их функции, в частности в качестве датчика жестов, так и в целях промышленного производства для навигации объекта и бесконтактной идентификации параметров объекта, например структуры и материала (состава) объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 2004 |
|
RU2263931C1 |
| МНОГОКАНАЛЬНЫЙ КОНФОКАЛЬНЫЙ МИКРОСКОП (ВАРИАНТЫ) | 2014 |
|
RU2574863C1 |
| СИСТЕМА И СПОСОБ ДИСТАНЦИОННОГО КОЛИЧЕСТВЕННОГО ОБНАРУЖЕНИЯ УТЕЧЕК ФЛЮИДА В ТРУБОПРОВОДЕ ПРИРОДНОГО ГАЗА ИЛИ НЕФТИ | 2004 |
|
RU2362986C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МИНИАТЮРНЫЙ ОПТИЧЕСКИЙ ДАТЧИК ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ МИКРО- И МАКРООБЪЕКТОВ И ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ОБНАРУЖЕННЫХ ОБЪЕКТОВ | 2020 |
|
RU2736920C1 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
| МОБИЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СКОПЛЕНИЙ ГАЗООБРАЗНОГО МЕТАНА | 2004 |
|
RU2333473C2 |
| ЛИДАРНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2018 |
|
RU2744932C1 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| СПОСОБЫ И СИСТЕМЫ НА ОСНОВЕ ЛИДАРА (LIDAR) С РАСШИРЕННЫМ ПОЛЕМ ЗРЕНИЯ НА ОСНОВЕ ПАССИВНЫХ ЭЛЕМЕНТОВ | 2019 |
|
RU2745882C1 |
Использование: изобретение относится к оптическому сенсорному устройству для определения расстояния до объекта и скорости объекта и для распознавания формы и структуры объекта и способу определения расстояния до объекта и скорости объекта и для распознавания формы и структуры объекта. Сущность: сенсорное устройство содержит оптически сопряженные по меньшей мере один источник лазерного излучения, по меньшей мере одно оптическое коллимирующее средство, светоделительное средство, светоотражающее средство, оптическое средство направления луча и по меньшей мере один детектор для регистрации излучения, отраженного от объекта, а также контроллер, при этом каждый из по меньшей мере одного источника лазерного излучения с соответствующим по меньшей мере одним детектором образуют по меньшей мере один индивидуально функционирующий и индивидуально настраиваемый измерительный канал с возможностью обеспечения характеристических данных об объекте, при этом контроллер выполнен с возможностью обеспечения одновременного или выборочного функционирования указанных измерительных каналов и оперативного регулирования параметров излучения по меньшей мере одного источника лазерного излучения, в зависимости от требуемого пространственного разрешения положения объекта во время функционирования устройства, и обработки и анализа характеристических данных объекта, регистрируемых на по меньшей мере одном детекторе для одновременного определения расстояния до объекта и его скорости, и распознавания формы и структуры объекта. Технический результат: обеспечение работы сенсорного устройства на небольших расстояниях (1-10 м), определение расстояния до неподвижного и подвижного объектов, определение скорости, формы и структуры объекта. Также повышение надежности функционирования и технологичности лидара, а также снижение влияния внешних шумов. 2 н. и 20 з.п. ф-лы, 26 ил., 1 табл. 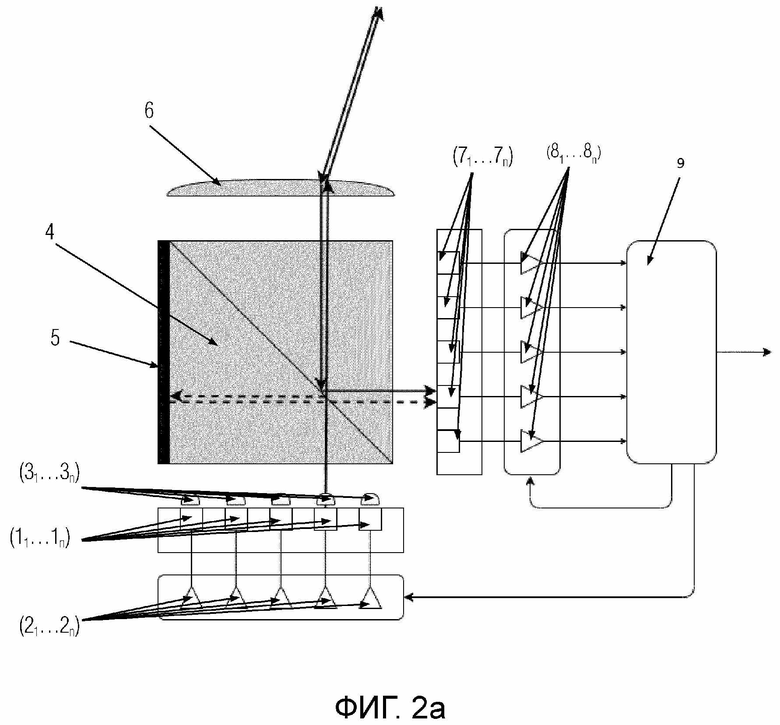
1. Оптическое сенсорное устройство для определения расстояния до объекта, скорости объекта и для идентификации формы и структуры объекта, содержащее:
оптически сопряженные по меньшей мере один источник лазерного излучения, по меньшей мере одно оптическое коллимирующее средство, расположенное над соответствующим по меньшей мере одним источником лазерного излучения, светоделительное средство, светоотражающее средство, оптическое средство направления луча, выполненное с возможностью направления луча в предварительно определенном направлении к объекту, и по меньшей мере один детектор для регистрации излучения, отраженного от объекта, а также контроллер, соединенный с каждым из по меньшей мере одного детектора и по меньше одного источника лазерного излучения,
при этом каждый из по меньшей мере одного источника лазерного излучения с соответствующим по меньшей мере одним детектором образуют по меньшей мере один индивидуально функционирующий и индивидуально настраиваемый измерительный канал с возможностью обеспечения данных об объекте,
при этом контроллер выполнен с возможностью обеспечения одновременного или выборочного функционирования указанных измерительных каналов и оперативного регулирования параметров излучения по меньшей мере одного источника лазерного излучения, в зависимости от требуемого оперативного разрешения по дальности во время функционирования устройства, и обработки и анализа данных объекта, регистрируемых на по меньшей мере одном детекторе для одновременного определения расстояния L до объекта и его скорости V, и распознавания формы и структуры объекта.
2. Устройство по п. 1, в котором по меньшей мере один источник лазерного излучения представляет собой лазер с возможностью перестройки длины волны.
3. Устройство по п. 2, в котором лазер с возможностью перестройки длины волны представляет собой поверхностно-излучающий лазер с вертикальным резонатором (VCSEL).
4. Устройство по п. 1, в котором по меньшей мере один источник лазерного излучения содержит несколько источников лазерного излучения, образующих двухмерную матрицу источников лазерного излучения.
5. Устройство по п. 1, в котором по меньшей мере один детектор представляет собой матричный фотодетектор.
6. Устройство по п. 1, в котором по меньшей мере один детектор содержит несколько детекторов, образующих двухмерную матрицу детекторов.
7. Устройство по п. 1, в котором по меньшей мере одно оптическое коллимирующее средство представляет собой по меньшей мере одну микролинзу и выполнено с возможностью коллимирования излучения, испускаемого по меньшей мере одним источником лазерного излучения.
8. Устройство по п. 7, в котором по меньшей мере одна микролинза представляет собой совокупность микролинз, образующих двухмерную матрицу микролинз.
9. Устройство по п. 1, в котором светоделительное средство представляет собой светоделительный куб с полуотражающим зеркалом, расположенным внутри указанного куба, и выполненный с возможностью разделения луча на опорный и измерительный лучи.
10. Устройство по п. 1, в котором светоотражающее средство представляет собой светоотражающее покрытие, нанесенное на внутреннюю или внешнюю поверхность светоделительного куба и выполненное с возможностью переотражения опорного луча на соответствующий детектор.
11. Устройство по п. 1, в котором светоотражающее средство представляет собой зеркало, расположенное перед внешней поверхностью светоделительного куба и выполненное с возможностью переотражения опорного луча на соответствующий по меньшей мере один детектор.
12. Устройство по п. 1, в котором оптическое средство направления луча представляет собой линзу, имеющую плоскую поверхность со стороны, обращенной к светоделительному кубу, а со стороны, обращенной к объекту, имеет поверхность, состоящую из по меньшей мере одной микролинзы.
13. Устройство по п. 12, в котором каждая из по меньшей мере одной микролинзы соответствует по меньшей мере одному источнику лазерного излучения.
14. Устройство по п. 12, в котором каждая из по меньшей мере одной микролинзы расположена под заданным углом к соответствующему падающему лазерному лучу и выполнена таким образом, чтобы соответствующий лазерный луч после прохождения через микролинзу был направлен в требуемом заданном направлении к объекту.
15. Устройство по п. 1, в котором оптическое средство направления луча представляет собой двухмерную матрицу микролинз, при этом каждая микролинза из матрицы микролинз расположена под заданным углом к соответствующему падающему лазерному лучу и выполнена таким образом, чтобы соответствующий лазерный луч после прохождения через микролинзу был направлен в требуемом заданном направлении к объекту.
16. Устройство по п. 1, дополнительно содержащее по меньшей мере один драйвер, соединенный с соответствующим по меньшей мере одним источником лазерного излучения и обеспечивающий подачу на него тока накачки по управляющему сигналу контроллера.
17. Устройство по п. 1, дополнительно содержащее оптический изолятор, расположенный между светоделительным средством и по меньшей мере одним оптическим коллимирующим средством и выполненный с возможностью предотвращения попадания отраженного от целевого объекта света на по меньшей мере один источник лазерного излучения и предотвращения дестабилизации функционирования указанных источников.
18. Способ определения расстояния до объекта, скорости объекта и для распознавания формы и структуры объекта посредством оптического сенсорного устройства для определения расстояния до объекта, скорости объекта и для идентификации формы и структуры объекта по одному из пп. 1-17, способ содержит следующие этапы, на которых:
- испускают лазерное излучение с предварительно заданной длиной волны с помощью по меньшей мере одного источника лазерного излучения, при этом оперативно регулируют ток накачки, подаваемый на по меньшей мере один источник лазерного излучения, в зависимости от требуемого разрешения объекта во время функционирования устройства,
- направляют указанное излучение на светоделительное средство,
где часть излучения, представляющая собой опорный луч, перенаправляется на по меньшей мере один детектор,
а другая часть излучения, представляющая собой измерительный луч, направляется на оптическое средство направления луча, обеспечивающее отклонение указанного измерительного луча в предварительно заданном направлении к объекту,
далее, отраженный от объекта по меньшей мере один измерительный луч направляется на соответствующий по меньшей мере один детектор, на котором измеряется разность частот сигналов, сформированных измерительным и опорным лучами, на основании которой одновременно определяется расстояние L до объекта и скорость V объекта,
при этом по мере прохождения измерительного луча через объект и/или отражения от него обеспечивается регистрация распределения коэффициента отражения по меньшей мере одного измерительного луча, отраженного от объекта, в зависимости от расстояния до объекта, на основании которой идентифицируется форма и структура объекта.
19. Способ по п. 18, в котором расстояние L (м) до объекта определяется посредством соотношения:
 ,
,
где c - скорость света (м/c), α - скорость нарастания частоты излучения (Гц/с),
Δω1 - разность частот сигналов, сформированных измерительным и опорными лучами при нарастании частоты излучения (Гц),
и Δω2 - разность частот сигналов, сформированных измерительным и опорными лучами при спаде частоты излучения (Гц).
20. Способ по п. 18, в котором скорость V (м/с) объекта определяется посредством соотношения:
 ,
,
где c - скорость света (м/c), α - скорость нарастания частоты излучения (Гц/с), ω0 - частота испускаемого света (Гц)
Δω1 - разность частот сигналов, сформированных измерительным и опорными лучами при нарастании частоты излучения (Гц), и
Δω2 - разность частот сигналов, сформированных измерительным и опорными лучами при спаде частоты излучения (Гц).
21. Способ по п. 18, в котором на этапе регулирования тока накачки, подаваемого на по меньшей мере один источник лазерного излучения, обеспечивается оперативное изменение разрешения (Res) объекта по дальности, определяемое следующим соотношением:
Res ,
,
Где с - скорость света (м/с),
Ω - зависимость частоты излучаемого лазерного света в зависимости от тока, накачиваемого в по меньшей мере один источник (11…1n) лазерного излучения (Гц/мА),
dΙ - амплитуда модуляции тока источника лазерного излучения в процессе сканирования объекта (мА).
22. Способ по п. 18, в котором этап идентифицирования формы и структуры объекта осуществляется в контроллере посредством сравнения полученной картины распределения коэффициента отражения по меньшей мере одного измерительного луча, отраженного от объекта, с известными картинами распределения коэффициентов отражения, свойственными определенным структурам объектов, хранящихся в памяти контроллера.
| US 8692979 B2, 08.04.2014 | |||
| WO 2019115278 A1, 20.06.2019 | |||
| JP 2020101453 A, 02.07.2020 | |||
| US 7283214 B2, 16.10.2007 | |||
| Центрифуга для выделения из жидкости взвешенных в ней веществ | 1928 |
|
SU13509A1 |
| ПЕЧЕНОЧНЫЙ ЗАЖИМ ДЛЯ ОПЕРАЦИИ НА ПЕЧЕНИ | 0 |
|
SU167276A1 |

