ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к движителям, предназначенным для создания силы тяги в текучих средах.
УРОВЕНЬ ТЕХНИКИ
Средства, предназначенные для движения, посредством отталкивания от текучей среды хорошо известны, к их числу относятся, в частности, воздушный винт, водяной винт, гребная лопасть, гребное колесо, маховое крыло и весла.
Из уровня техники известен движитель, представляющий собой клапанную решетку, обладающий: решетчатым каркасом, способным совершать возвратно-поступательные (колебательные) движения перпендикулярно своей поверхности за счет собственного привода (двигатель (7), ресивером, муфтой сцепления, кривошипом (8) и пневмодвигателем); клапанами (4), расположенными в проемах решетчатого каркаса (2), способными одновременно открывать и закрывать проемы решетчатого каркаса, изменяя его площадь наибольшего поперечного сечения; вырабатывает движущую силу за счет сил реакции среды в процессе собственных управляемых перемещений и трансформаций, с последующей передачей этой силы объекту движения посредством собственного корпуса (RU 60479 U1, В64С 33/00, 27.01.2007, описание стр.3, строки 5-23, фиг.1-4, 5 с.).
Заявленное изобретение отличается от известного тем, что клапаны выполнены активными, за счет собственного привода, содержащего собственный источник механической энергии. Активные клапаны способны одновременно открывать и закрывать проемы каркаса. Также заявленное изобретение отличается наличием системы управления, которая позволяет организовать согласованную поочередную работу приводов решетчатого каркаса и приводов активных клапанов и позволяет регулировать величину и направление силы тяги, вырабатываемой активной клапанной решеткой. Наиболее близким аналогом активной клапанной решетки является махолет. Махолет состоит из двух крыльев, расположенных зеркально на одной базовой оси и закрепленных шарнирно, имеющих внешний каркас, соединенный шатунами с приводом, состоящим из кривошипа и коромыслового механизма. Площадь крыла внутри каркаса состоит из сегментов, каждый сегмент имеет по своему центру ось, закрепленную концами к каркасу крыла в лобовой и хвостовой его частях с возможностью поворачиваться на этих концах оси вместе с сегментом, причем концы осей всех сегментов крыла в лобовой части каркаса объединены между собой с помощью рычагов-шарниров, которые связаны с механизмом, состоящим из шатунов, кривошипа и коромыслового механизма таким образом, что при движении крыльев вверх все сегменты крыльев поворачиваются на угол 90° относительно плоскости крыльев, пропуская воздушную массу (воздушный поток) в образовавшиеся щели, а при движении крыльев вниз все сегменты крыльев поворачиваются в исходное положение, плотно прилегая друг к другу частью сегмента, и составляют площадь крыльев для захвата воздушной массы.
Махолет работает следующим образом. Начальное состояние МЛА - горизонтально расположенные крылья 1. Сегменты 7 плотно прилегают друг к другу краями 12. При вращении кривошипы 5 посредством шатунов 4 сообщают связанным с ними крыльям 1 основное маховое движение вниз, захватывая воздушную массу всей площадью крыльев 1 до прихода кривошипа 5 в нижнюю точку. После перехода этой точки шатуны 4 начинают поднимать крылья 1 вверх с одновременным поворотом вертикального рычага 11, шарниров 10, которые воздействуют на горизонтальные рычаги 9, а через них на сегменты 7, поворачивая их на угол 90° относительно плоскости крыльев 1, открывая пространства (щели) для прохода воздуха через крылья 1, уменьшая тем самым сопротивление крыльев 1 воздушному потоку. В верхней точке кривошипа 5, когда шатуны 4 начинают опускать крылья 1 вниз, поворачиваются рычаги 9 и 11, шарниры 10, а с ними возвращаются в исходное состояние и сегменты 7, поворачивая их на осях 8, которые плотно прилегают друг к другу краями 12 и составляют площадь крыльев 1 для захвата воздуха, создавая подъемную силу для полета (Источник информации: патент RU 2369526 С1, описание стр.4-5, фиг 1-3).
Привод, энергосиловое устройство, приводящее в движение машину или механизм.
Привод состоит из источника энергии, передаточного механизма и аппаратуры управления. Источником энергии служит двигатель или устройство, отдающее заранее накопленную механическую энергию (БСЭ).
Механизм, система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел. Твердое тело, входящее в состав механизма, называется звеном. Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой (БСЭ).
Из определения привода следует, что для отдельного привода необходимы: отдельный источник энергии; отдельный механизм преобразования энергии движения; и блок управления.
Как следует из описания махолета, энергия вращения подается на ось кривошипов 5. А сам кривошип 5, шатуны 4, крылья 1, вертикальные рычаги 11, шарниры 10, горизонтальные рычаги 9, оси 8 и сегменты 7, являются звеньями и составляют кинематические пары, входящие в состав единого механизма преобразования энергии вращения, первой степени свободы, когда положение одного звена механизма строго определяет положение всех других звеньев. Причем, одна часть этого механизма предназначена для преобразования энергии вращения, которое подводится к кривошипу 5, в махательное движение крыльев 1, а другая его часть преобразовывает эту же энергию во вращательное движение осей 8 сегментов 7.
В отличие от махолета активная клапанная решетка имеет отдельные источники механической энергии: 1) для перемещения решетчатого каркаса; 2) для клапанов, которые открывают и закрывают проемы решетчатого каркаса. Благодаря этому осуществляется поочередная работа привода решетчатого каркаса и привода активных клапанов.
У махолета имеется строгая зависимость движения сегментов крыла от направления движения самого крыла. При движении крыла вверх сегменты открывают проемы крыла, при движении крыла вниз сегменты закрывают проемы. Складывается ситуация, когда при движении крыльев сегменты занимают промежуточное положение относительно полного открытия или полного закрытия проемов крыльев. Что снижает эффективность вырабатывания подъемной силы при движении крыла вниз и увеличивает величину сопротивления движению крыла вверх. У активной клапанной решетки такой зависимости нет. Процесс открытия или закрытия проемов решетчатого каркаса не совпадает по времени с процессом перемещения решетчатого каркаса. Сначала происходит процесс открытия или закрытия проемов решетчатого каркаса и только затем происходит перемещение самого решетчатого каркаса. Поэтому при движении решетчатого каркаса, когда его проемы полностью закрыты, он максимально эффективно вырабатывает движущую силу, а когда проемы каркаса оказываются полностью открытыми, он испытывает минимальное сопротивление своему движению, что так же оказывает высокую эффективность.
Активная клапанная решетка способна инвертировать направление вырабатываемой силы тяги. В зависимости от того происходит открытие или закрытие проемов решетчатого каркаса перед его движением в ту или иную сторону, меняется и направление вырабатываемой силы тяги. Это достигается благодаря блоку управления, который изменяет моменты открытия и закрытия проемов на противоположные. Махолет не обладает способностью инвертировать вырабатываемую силу тяги.
Благодаря отдельным приводам с источниками механической энергии, а так же применению множества исполнительных устройств - актуаторов, активная клапанная решетка имеет больший запас прочности (надежности) относительно махолета. Даже с одновременным выходом из строя нескольких исполнительных устройств не приведет к трагическим последствиям, а только повлияет на мощность вырабатываемой силы тяги.
ПОДРОБНОЕ РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Для определенности терминам и выражениям, используемым в настоящем тексте, придают следующее значение и объем.
Клапана (заслонки, створки) - активные управляемые элементы, открывающие/закрывающие просветы на пути потока текучей среды.
Решетчатый каркас (рамка, каркас) - несущая конструкция, снабженная проемами, имеющая небольшое сопротивление текучей среде (с большим проходным сечением проемов).
Привод (актуатор) - устройство, приводящее в движение активные клапаны или решетчатый каркас за счет собственного источника механической энергии или благодаря своим физико-химическим свойствам.
Остальные термины и выражения используются в значении, которое известно специалистам в данной области.
Задача настоящего изобретения состоит в создании движителя, в котором гидравлическое сопротивление активной клапанной решетки может управляемо изменяться в зависимости от направления ее движения.
Поставленная задача решена благодаря тому, что в процессе согласованных колебаний решетчатого каркаса и работы клапанов возникают силы реакции среды, обеспечивающие ненулевой по величине вектор тяги движителя, а применение быстродействующих приводов для клапанов и решетчатого каркаса и их попеременная работа позволяют увеличить частоту колебаний каркаса и, следовательно, развиваемую движителем силу тяги. Использование принципа попеременной работы приводов клапанов и решетчатого каркаса обеспечивает максимальную эффективность при вырабатывании силы тяги. Возможность реверсировать вектор силы тяги за счет изменения моментов открытия и закрытия проемов решетчатого каркаса на противоположные позволяет активной клапанной решетке выполнять функцию торможения. Активная клапанная решетка способна вырабатывать силу тяги, располагаясь в любом направлении пространства, даже в направлении действия силы тяжести.
Ключевыми признаками активной клапанной решетки (для краткости - «движителя»), согласно изобретению, являются:
(а) наличие решетчатого каркаса, имеющего проемы для текучей среды;
(б) наличие активных (с собственным приводом), управляемых клапанов, способных изменять величину проходного сечения упомянутых проемов;
(в) наличие привода упомянутого решетчатого каркаса, принуждающего его совершать периодические (в частности, возвратно-поступательные или колебательные) движения;
(г) наличие системы управления, в которую входят: подконтрольные объекты; датчики; блок приема, переработки, хранения информации и вырабатывания управляющих сигналов (блок управления); устройства усиления управляющих сигналов; исполнительные элементы (приводы). Система управления обеспечивает согласованную, попеременную работу привода клапанов с работой привода решетчатого каркаса.
Движитель содержит: корпус, к которому закреплен привод решетчатого каркаса, заставляющий каркас совершать возвратно-поступательные (колебательные) движения; решетчатый каркас с проемами и установленными в них активными заслонками с собственным приводом; датчики положения и блок управления образуют систему управления приводами. Корпус движителя служит для соединения его с объектом, приводимым в движение, и передачи ему силы тяги. Заслонки открывают и закрывают проемы каркаса посредством собственного привода или за счет своих физико-химических свойств. Работа заслонок синхронизирована таким образом, чтобы открытие или закрытие всех проемов каркаса происходило одновременно. Когда заслонки открывают проемы каркаса, текучая среда может сравнительно беспрепятственно проходить сквозь него (каркас). При открытых проемах каркас имеет малую площадь наибольшего поперечного сечения и при движении в среде испытывает незначительное сопротивление. Когда проемы каркаса закрыты, он оказывается непроницаемым для текучей среды. В этот момент каркас имеет минимально возможную для своей конструкции площадь проходного сечения и при движении в среде испытывает наиболее сильное сопротивление. Таким образом, открывая и закрывая проемы каркаса, заслонки изменяют площадь проходного сечения и коэффициент его (каркаса) лобового сопротивления.
Совершая движения в одном направлении, каркас имеет максимально возможную, а при движении в обратном направлении, - минимально возможную площадь проходного сечения. Движитель снабжен системой управления, при помощи которой осуществляется согласованная, поочередная работа привода заслонок и привода каркаса. В систему управления входят:
а) подконтрольные объекты (заслонки, решетчатый каркас).
б) датчики для сбора информации о работе (положении) подконтрольных объектов. В зависимости от вида контролируемой величины в датчиках могут применяться различные чувствительные элементы.
в) блок управления, который предназначен для приема всех информационных сигналов, их хранения и переработки, и в зависимости от совокупности поступающей информации вырабатывания управляющих сигналов для исполнительных устройств.
г) усилители управляющих сигналов. Применяются для передачи сигналов от блока управления исполнительным устройствам с использованием посторонних источников энергии.
д) исполнительные устройства (приводы, актуаторы) - устройства, изменяющие положение подконтрольных объектов благодаря собственным источникам механической энергии или за счет своих (физико-химическим свойств.
Благодаря системе управления и наличию отдельных приводов для самого каркаса и активных клапанов, осуществляется поочередная работа этих приводов, максимально увеличивая эффективность при вырабатывании силы тяги. Таким образом, каркас, совершая периодические (возвратно-поступательные или колебательные) движения, испытывает действие сил реакции среды, различных по величине и направлению, равнодействующая которых, усредненная по времени, оказывается направленной в одном из двух направлений в зависимости от того, как именно согласованы моменты срабатывания клапанов с направлением движения каркаса.
Движитель содержит управляемый, подвижный решетчатый каркас, в проемах которого расположены управляемые заслонки. Управляемые заслонки способны изменять величину проходного сечения проемов каркаса. Открывая и закрывая проемы каркаса, заслонки изменяют его пропускную способность в пределах от полной непроницаемости, до почти беспрепятственного прохождения текучей среды сквозь него. Открывая и закрывая проемы в каркасе, заслонки изменяют площадь наибольшего поперечного сечения и коэффициент лобового сопротивления движителя. Система управления согласовывает попеременную работу приводов заслонок и каркаса. Движитель имеет корпус, посредством которого вырабатываемая каркасом сила тяги передается объекту, приводимому в движение.
В частной форме выполнения в качестве приводов могут выступать линейные быстродействующие сервоприводы.
В одной частной форме выполнения к качестве приводов могут выступать устройства, выполненные с возможностью преобразования вращательного движения в возвратно-поступательное.
В еще одной частной форме выполнения в качестве приводов могут выступать кривошипно-шатунный механизм, кулачковый механизм или вибрационный привод.
В другой частной форме реализации приводы могут быть выполнены на основе электродвигателей.
В частной форме реализации приводы могут быть выполнены на основе углеродных нанотрубок.
В одной частной форме выполнения приводы могут быть выполнены на основе биморфных пластин.
В одной частной форме выполнения приводы могут быть выполнены на основе пьезоэлементов.
Движитель найдет широкое применение при производстве транспортных средств наземного, воздушного, водного, подводного и смешанного классов.
Сущность вышеописанного изобретения наглядно иллюстрируется фигурами чертежей 1-10 на примере конкретных форм воплощения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
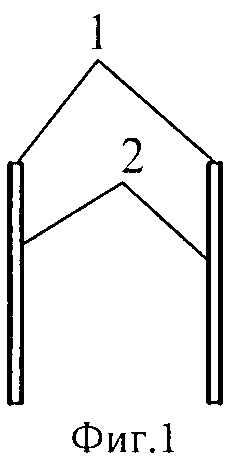
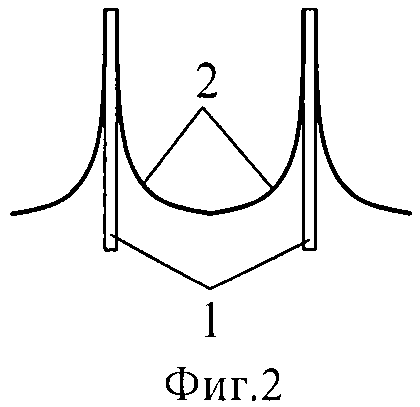
На фиг.1 и 2 изображен каркас 1 с заслонками 2, выполненными на основе биморфного привода.
На фиг.1 движитель изображен на этапе рабочего цикла, когда биморфные пластины 2 плотно прижаты к стенке каркаса 1.
На фиг.2 движитель изображен на этапе рабочего цикла, когда биморфные пластины 2 под воздействием электрического напряжения изгибаются, закрывая проемы в каркасе 1.
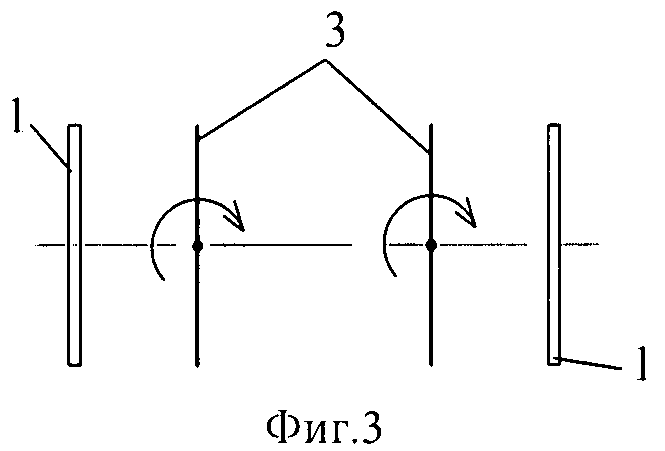
На фиг.3 и 4 изображен каркас 1, у которого заслонками служат пластины 3, выполненные с возможностью поворота в его проемах.
На фиг.3 движитель изображен на этапе рабочего цикла, когда пластины 3 не закрывают проемы каркаса 1.
На фиг.4 движитель изображен на этапе рабочего цикла, когда заслонки 3 закрывают проемы каркаса 1.
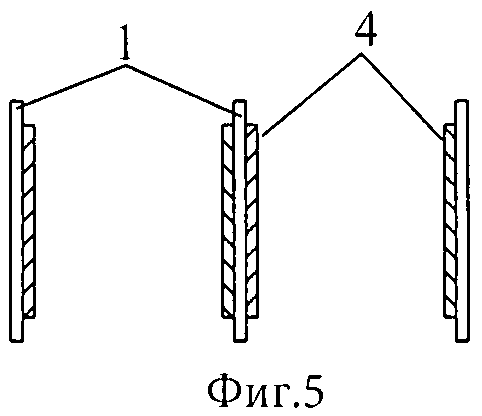
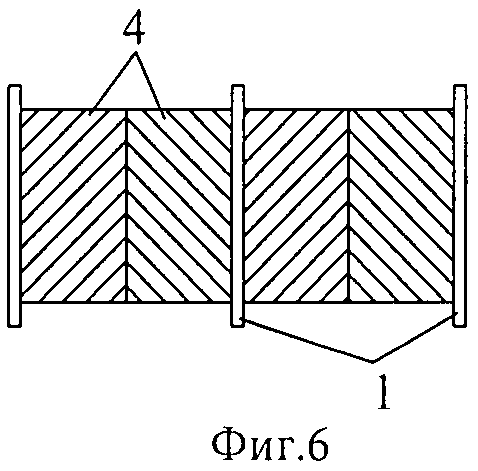
На фиг.5 и 6 изображен каркас с заслонками, выполненными на основе углеродных нанотрубок 4.
На фиг.5 движитель изображен на этапе рабочего цикла, когда активный элемент 4 имеет минимальный размер и не закрывает проемы каркаса 1.
На фиг.6 движитель изображен на этапе рабочего цикла, когда заслонки на основе углеродных нанотрубок 4 имеют максимальную ширину и закрывают проемы каркаса 1.
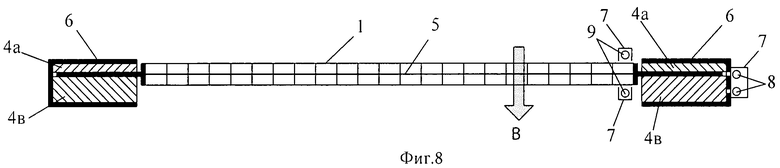
На фиг.7 и 8 изображена одна из частных форм воплощения изобретения. Позицией 1 обозначен решетчатый каркас, а позициями 4а и 4в обозначен его привод. Привод 4а и 4в выполнен на основе углеродных нанотрубок. Позицией 6 обозначен корпус движителя. Позицией 7 обозначен блок управления, с датчиком положения 8 каркаса, и датчиком положения 9 заслонок. Стрелками «А» и «В» показаны направления перемещения каркаса 1.
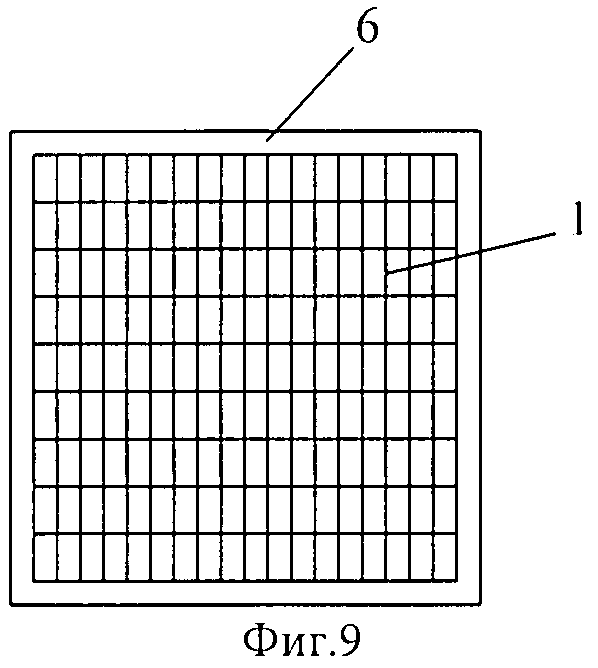
Фиг.9 изображает движитель, когда проемы каркаса 1 открыты.
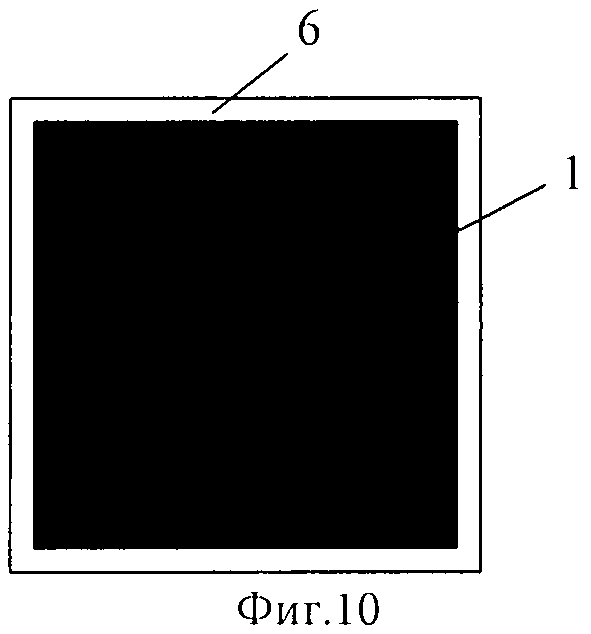
Фиг.10 изображает движитель, когда проемы каркаса 1 закрыты. Позицией 6 обозначен корпус движителя.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Нижеследующие примеры даются только для иллюстрации общей концепции изобретения. Ничто в настоящем разделе описания не должно быть истолковано как ограничение объема притязаний.
В одной из частных форм воплощения движителя в качестве заслонок используются пластины 5; как показано на фиг.7 и 8. Поворачиваясь, эти пластины открывают или закрывают (фиг.7 и 8, соответственно) проемы каркаса 1. В момент, когда пластины открывают проемы каркаса 1 (см. фиг.7), текучая среда может беспрепятственно проходить через него. В этот момент (см. фиг.9) каркас 1 имеет максимально возможную площадь проходного сечения. В момент (см. фиг.8), когда пластины 5 закрывают проемы каркаса 1, последний становится практически непроницаемым для текучей среды. В этот момент каркас 1 (см. фиг.10) имеет минимально возможную для своей конструкции площадь проходного сечения.
Поворот пластин в решетчатом каркасе 1 осуществляется электродвигателями (не показаны). Приводом каркаса 1, придающим ему колебательные движения, служат массивы углеродных нанотрубок, заключенных в эластичную оболочку 4а и 4в. Когда массивы 4а под воздействием управляющего напряжения приобретают свой максимальный объем, а массивы 4в свой минимальный объем, тогда каркас 1 находится в крайнем нижнем положении (см. фиг.7). В этот момент датчик 8 каркаса подает сигнал на блок управления о крайнем нижнем положении каркаса и блок управления 7 вырабатывает сигнал управления заслонками, заставляющий их открыть проемы каркаса 1. После того как проемы каркаса 1 окажутся открытыми, сработает датчик 9 заслонок и блок управления 7 подает управляющие сигналы на привод каркаса 1 и тогда элементы привода 4в увеличиваются в объеме, а элементы 4а - уменьшаются. Вследствие этого, каркас 1 перемещается в направлении, указанном стрелкой «А», пока не достигнет своего крайнего верхнего (по схеме) положения. В процессе перемещения каркаса в направлении «А» его проемы оказываются открытыми, и текучая среда практически беспрепятственно проходит сквозь него. В этот момент каркас 1 имеет максимально возможную площадь проходного сечения и при движении в среде испытывает незначительное сопротивление. Когда каркас 1 (см. фиг.8) достигнет своего крайнего верхнего (по схеме) положения, сработает датчик 8 и подаст информационный сигнал блоку управления о крайнем верхнем положении каркаса 1. Тогда блок управления 7 начинает вырабатывать управляющие сигналы для заслонок 5, заставляя их закрыть проемы каркаса 1. После того как заслонки закроют проемы, сработает датчик 9 и блок управления начнет вырабатывать управляющие сигналы для привода каркаса 1. В этом случае элементы привода 4а увеличиваются в объеме, а элементы 4в уменьшаются, заставляя каркас 1 перемещаться в направлении, указанном стрелкой «В». Когда заслонки 5 закрывают проемы каркаса, он становится практически непроницаем для текучей среды. В этот момент каркас 1 имеет минимально возможную для своей конструкции площадь проходного сечения и при движении в текучей среде испытывает сильное сопротивление. Таким образом, открывая и закрывая проемы каркаса 1, заслонки изменяют площадь проходного сечения и коэффициент его (каркаса) лобового сопротивления. Совершая движения в одном направлении, каркас 1 имеет максимально возможное, а при движении в обратном направлении, - минимально возможное проходное сечение. Совершая возвратно-поступательные (колебательные) движения, каркас 1 испытывает действие сил реакции текучей среды, различных по величине и направлению. Усредненная по времени равнодействующая сил, действующих на каркас 1, оказывается направленной только в одну сторону, что и приводит к возникновению направленной силы тяги. Посредством привода каркаса сила тяги через корпус 6 передается объекту, приводимому в движение. При построении движителей на основе вышеописанной активной клапанной решетки, для повышения эффективности работы и уменьшения массы корпуса движителя, целесообразно использовать четное количество решетчатых каркасов, когда одна половина каркасов перемещается в одном направлении, а другая - в противоположном. Две одинаковых по массе группы каркасов, в противофазе колеблющихся относительно центра масс, поочередно вырабатывают движущую силу и через общий корпус передают ее объекту, приводимому в движение.
В качестве заслонок, закрывающих и открывающих проемы каркаса, а также, в качестве приводов каркаса, обуславливающих его периодическое движение, могут служить биморфные пластины. Широкое применение в промышленности нашли биморфные пластины из пьезокерамики. Биморф состоит их двух тонких склеенных между собой пьезокерамических пластин с прокладкой между ними или без нее. Чаще всего толщина пластин составляет 0,3÷0,5 мм, длина 4÷60 мм, однако возможно изготовление биморфа любой геометрии. Пьезокерамические биморфные пластины обеспечивают перемещение до 5 мм и способны развивать усилие до 5 Н.
В настоящее время ведутся разработки по изготовлению биморфных пластин на основе макроволокон из нанотрубок с вакуумным отжигом. Указанные биморфные пластины превзошли свойства биморфных пластин на основе bucky-бумаги, которые развивали усилия в 0,75 МПа при смещении конца пластины в несколько миллиметров. Также в качестве заслонок и приводов решетчатого каркаса может служить новый материал, построенный из пучков углеродных нанотрубок. Если приложить электрическое напряжение к такому материалу, оно создает одноименный заряд на нанотрубках, заставляя их взаимно отталкиваться. Изменяя полярность, нанотрубки притягиваются друг к другу. Материал обратимо расширяется, увеличиваясь в размерах втрое, и сжимается в таких же объемах. На сегодняшний день привод из нанотрубок способен расширяться и сокращаться с частотой 1 кГц. Также, в качестве заслонок могут выступать пластины из легких и прочных материалов. Поворот пластин в проемах каркаса 1 могут обеспечивать электродвигатели или наномускулы. Широкое распространение в моделировании техники получили бесколлекторные электродвигатели фирмы Xcelorin. Двигатели Xcelorin способны развивать обороты до 10250 об/Вольт. Наномускул от NanoMuscle изменял длину на 12÷13% с усилием в 4000 раз большим, чем человеческие мышцы и со скоростью 0,1 секунды.
При производстве движителя и таких его частей, как корпус, каркас, заслонки, целесообразно использовать легкие и прочные материалы, такие как: алюминиевые сплавы, стеклопластики, композитные наноматериалы и т.п. В данном случае, для изготовления заслонок можно использовать титан. В качестве привода решетчатого каркаса 1, для придания ему возвратно-поступательных (колебательных) движений, можно использовать линейные быстродействующие сервоприводы, кривошипно-шатунный механизм, кулачковый привод, вибрационный привод, и другие механизмы, подходящие для преобразования вращательного движения в возвратно-поступательное. Также, в качестве привода решетчатого каркаса 1, можно применять пьезоактюаторы, которые способны развивать усилие до сотен тысяч Ньютонов, осуществлять перемещение от микронов до миллиметров с частотой до тысяч Герц.
Должно быть понятно, что средний специалист может использовать отличительные особенности настоящего изобретения и внести эквивалентные замены с достижением поставленной технической задачи; такие замены включены в объем охраны согласно нижеприведенной формуле изобретения.

Активная клапанная решетка относится к классу движителей и предназначена для создания силы тяги в газовых и жидких средах за счет собственных колебаний. Активная клапанная решетка состоит из решетчатого каркаса, клапанов, размещенных в проемах каркаса, приводов и блока управления. Клапаны выполнены с возможностью одновременного открывания и закрывания проемов для изменения гидравлического сопротивления решетчатого каркаса. Привод решетчатого каркаса и привод клапанов имеют собственные источники механической энергии. Блок управления производит обработку информации, получаемой от датчиков, и вырабатывает управляющие сигналы исполнительных механизмов приводов для согласования их поочередной работы. Достигается возможность изменять величину и направление силы тяги за счет изменения гидравлического сопротивления движителя. 10 ил.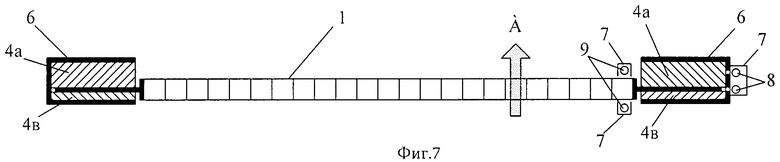
Активная клапанная решетка, относящаяся к классу движителей, отличающаяся тем, что содержит: решетчатый каркас, снабженный проемами, в проемах имеются активные управляемые клапаны, выполненные с возможностью их (проемов) одновременного открывания и закрывания для изменения гидравлического сопротивления решетчатого каркаса; отдельные приводы с собственными источниками механической энергии для решетчатого каркаса и для клапанов; датчики для сбора информации, блок управления для обработки входящей информации и вырабатывания управляющих сигналов для исполнительных элементов (приводов), благодаря чему обеспечивается согласованная, поочередная работа приводов упомянутых клапанов и решетчатого каркаса, в зависимости от требуемого направления и величины вырабатываемой силы тяги.
| СПОСОБ ПОЛУЧЕНИЯ МЕТАЛЛИЧЕСКОГО БАРИЯ В ЭЛЕКТРОВАКУУМНЫХ ПРИБОРАХ | 1940 |
|
SU60479A1 |
| МАХОЛЕТ | 2008 |
|
RU2369526C1 |
| УЛЬТРАЗВУКОВОЙ СКАНИРУЮЩИЙ ДАТЧИК | 1995 |
|
RU2111703C1 |
| GB 1400375 A, 09.07.1975 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЬЕЗОЭЛЕМЕНТОВ ДЛЯ ВЫСОКОЧАСТОТНЫХ РЕЗОНАТОРОВ | 2010 |
|
RU2458458C2 |
| МАХОЛЕТ | 2002 |
|
RU2266238C2 |

