Изобретение относится к авиационной технике, в частности к машущекрылым летательным аппаратам, другими словами, махолетам, использующим машущие крылья для создания подъемной силы и горизонтальной тяги в полете. На протяжении существования человеческой цивилизации машущий полет всегда был мечтой человека. Сейчас мы знаем о многочисленных безуспешных попытках осуществить такой полет. Это говорит о том, что эта проблема требует еще много новых идей, решений и материалов для создания работоспособных конструкций крыльев махолетов.
Из многочисленных патентов можно выделить следующие патенты-аналоги:
1. Летательный аппарат с движителем в виде машущих крыльев. SU №1785953, B64C 31/04, публикация 07.01.93 г.
2. Летательный аппарат с движителем в виде машущих крыльев. РФ №2217355, B64C 33/00, публикация 27.11.2003 г.
3. Устройство машущих крыльев с циклической круткой и управлением по крену. РФ №2298509, B64C 33/02, публикация 10.05.2007 г.
4. Способ образования толкающей и подъемной силы и летательный аппарат, реализующий этот способ. РФ №2344968, B64C 33/00, публикация 27.01.2009 г.
5. Способ приведения в движение машущих крыльев махолета и махолет. РФ №2450954, B64C 33/00, 33/02, публикация 20.05.2012 г.
6. Махолет. RU №2451623, B64C 39/00, публикация 27.05.2012 г.
7. Летательный аппарат. РФ №2480378, B64C 33/02, публикация 27.04.2013 г.
8. Махолет. РФ №2488525, B64C 33/00, публикация 27.07.2013 г.
Известен "Махолет", патент РФ №2129076, МПК B64C 33/02 (публикация 20.04.99 г.), у которого машущие крылья образуют механическую резонансную систему, приводимую в действие усилием пилота. Как известно из техники, резонансная система является самой экономичной с точки зрения потребления энергии. Недостатком такого махолета является то, что часть крыла в зоне у основания машущих крыльев практически не участвует в создании подъемной силы и тяги, а также крайняя неравномерность величины подъемной силы в зависимости от направления маховых движений крыльев. Это снижает экономичность машущего полета.
Известен "Способ приведения в движение машущих крыльев махолета и махолет", патент РФ №2450954, B64C 33/00, 33/02, публикация 20.05.2012 г., у которого два тандемных крыла в резонансном режиме совершают маховые движения в противофазе. В этой конструкции подъемная сила имеет величину гораздо более равномерную, т.е. эффективность полета более высокая. Недостатком является относительно более сложная кинематика синхронизации и управления машущим режимом двух тандемно расположенных крыльев (с четырьмя консолями), машущих в противофазе.
Известен также "Махолет", РФ №2451623, B64C 39/00, публикация 27.05.2012 г., у которого в резонансном режиме колеблются два консольных крыла, шарнирно закрепленных на корпусе и соединенных между собой упругим элементом, который создает с крыльями колебательную систему с резонансным режимом работы. Такая конструкция, по моему мнению, является крупным шагом вперед к реализации машущего полета. Недостатком такого махолета является крайняя неравномерность величины подъемной силы в зависимости от направления маховых движений крыльев махолета, в частности при фазе подъема крыльев вверх, величина подъемной силы сильно отличается от величины подъемной силы при фазе опускания крыльев вниз. Это порождает ненужные динамические нагрузки на конструкцию и экипаж.
Наиболее близким техническим решением к моему изобретению является "ARTICULATED WING ORNITOPTER" (Сочлененное крыло орнитоптера), публикация 13.02.1979 г, B64C 33/00, у которого имеется только одно сочлененное крыло, состоящее из центрального 28 и двух наружных сегментов 30, которые шарнирными узлами 98 соединены с центральным сегментом 28. Крыло закреплено на корпусе в центре крыла на верхнем конце 89 элемента привода 88 болтами 90 (фиг. 5, 6). По бокам к крылу присоединены шарнирные звенья 102, которые компенсируют изменение длины в центральной части сочлененного крыла при машущих движениях крыла. В этой конструкции машущий полет происходит следующим образом: под действием усилия элемента привода 88, направленного вверх, центральный сегмент 28 крыла поднимается вверх, одновременно, наружные сегменты 30, поворачиваясь в шарнирах 98 и 104, синхронно опускаются вниз. Затем центральный сегмент 28 крыла опускается, синхронно поднимаются наружные сегменты 30. Такая конструкция крыла позволяет уравновесить аэродинамические силы и избавить конструкцию махолета и экипаж от ненужных динамических нагрузок. При положительных моментах имеется недостаток.
Недостатком такой конструкции является то, что конструкция, крепящая крыло к корпусу, одновременно передает машущие усилия от двигателя к крылу, т.е. конструкция, передающая вертикальные машущие движения (элемент привода 88), одновременно является силовым узлом (верхний конец 89) крепления крыла к корпусу махолета, т.е. он должен удовлетворять совершенно противоположным требованиям, что нереально. Крепление крыла должно быть таким жестким, что допустимы только деформации в пределах модуля упругости материала конструкции, а в этом случае еще имеются кинематические звенья для вертикального перемещения элемента привода 88, имеющие значительно (на порядок или 2 порядка) большие смещения в направляющих подшипниках узла крепления крыла, что совершенно не допустимо. Боковые шарнирные звенья 102 здесь почти не помогают, а в некоторых случаях (крен, вираж) вносят дополнительные нагрузки на этот силовой узел.
Технический результат, достигаемый при использовании моего изобретения, обеспечивает упрощение конструкции системы крыла, более эффективное создание подъемной силы и тяги, более надежное крепление крыла, а также сохранение эффективной управляемости махолетом на малых скоростях полета вплоть до скоростей, близких к нулевым.
Техническое решение по данному изобретению для достижения вышеупомянутого технического результата таково, что в известном прототипе, содержащем корпус и крыло, которое включает в себя первый и второй наружные сегменты крыла и центральный сегмент крыла, который соединен шарнирами с первым и вторым наружными сегментами крыла, а также движущее средство для центра крыла и шарниры, обеспечивающие вращение внешних сегментов крыла, обеспечивая большую рабочую поверхность крыла и равномерную подъемную силу, вводятся следующие отличия:
крыло имеет единую (не сочлененную) конструкцию, которая способна упруго изгибаться по размаху в вертикальной плоскости, опираясь на два шарнирных узла крепления, стоящих на раме корпуса, и которые разнесены на равные расстояния относительно продольной плоскости симметрии корпуса, причем величина расстояния должна быть такова, что разница между амплитудами колебаний середины крыла и концов крыла была не более 15%, т.е. совершать маховые движения внешними (консольными) частями и в противофазе - центральной частью крыла. Для компенсации изменения длины центральной части крыла, находящейся между шарнирными узлами, при ее изгибах, на одном из двух шарнирных узлов установлен компенсирующий элемент, например, дополнительный шарнир.
Такое крыло, упруго изгибаясь на этих шарнирных узлах, может совершать колебания в резонансном режиме как единая колебательная система. Шарнирные узлы, на которых закреплено крыло, имеют ось вращения параллельно хорде крыла и разнесены вдоль крыла симметрично в разные стороны относительно центральной балки корпуса махолета. Таким образом шарнирные узлы выделяют в крыле центральную часть и две внешние (консольные) части. При этом площади центральной части крыла и суммы площадей обоих консолей должны быть приблизительно одинаковы для того, чтобы уравновесить аэродинамические силы, возникающие при машущем полете.
Для компенсации изменения длины средней части крыла при ее изгибе на одном из шарнирных узлов крепления установлен компенсирующий шарнир. Такое крыло может совершать машущие движения в режиме резонансных колебаний за счет упругой деформации силовых элементов (лонжерона) единого крыла от действия знакопеременной силы передаточного механизма двигателя, приложенной передаточным звеном к середине размаха крыла и действующей в вертикальном направлении. Теоретически, такое крыло можно рассматривать как упругий стержень, колеблющийся на двух шарнирных опорах с симметричными консолями на концах. В теоретической механике подробно изучен случай резонансного колебания такого упругого стержня.
Крыло работает следующим образом. При воздействии знакопеременной вертикальной силы от двигателя, приложенной передаточным звеном в середине размаха крыла, центральная часть крыла, упруго изгибаясь (между двух шарнирных узлов крепления), совершает движения вверх-вниз в противофазе с внешними (консольными) частями крыла, которые также упруго изгибаются с почти такой же амплитудой. Площади центральной и внешних частей крыла подобраны из условия уравновешивания вертикальных аэродинамических сил, возникающих при колебаниях крыла. Таким образом при полете махолета значительно снижаются возмущения и колебания всего махолета. Экипаж махолета будет при этом находиться в более комфортных условиях.
Для разбега и взлета махолета нужна поступательная тяга, которая возникает за счет автоматического изменения угла атаки профиля крыла, которое податливо скручивается под действием набегающего потока воздуха. Изменение угла атаки (скручивание) профилей внешних и центрального сегментов крыла совершаются в разных направлениях путем упругого поворота профиля каркаса крыла вокруг круглого лонжерона (центра жесткости профиля), а оболочка каркаса имеет для этого достаточные эластичность и упругость. Другими словами, при движении внешних (консольных) частей крыла вверх (отрицательная подъемная сила), их задняя кромка под действием набегающего потока воздуха упруго опускается вниз, поворачивая аэродинамический профиль на угол +А (фиг. 6), уменьшая угол атаки и создавая горизонтальную тягу, при этом центральная часть крыла в противофазе опускается вниз (положительная подъемная сила), а аэродинамический профиль центральной части крыла таким же образом под действием набегающего потока воздуха упруго поворачивается в противоположном направлении на угол -А (фиг. 6), уменьшая угол атаки и, создавая подъемную силу и горизонтальную тягу.
То же самое происходит при перемене направления движения частей крыла на противоположное, т.е. центральная часть крыла поднимается вверх (подъемная сила отрицательна) плюс горизонтальная тяга, а внешние (консольные) части крыла опускаются вниз (подъемная сила положительна) плюс горизонтальная тяга. Такие циклы повторяются с частотой, необходимой для возникновения резонансных колебаний крыла, что позволяет свести к минимуму мощность, потребную для полета махолета.
Одно крыло не позволяет иметь достаточно большой амплитуды маховых колебаний, т.к. из-за требований прочности крыло не обладает нужной гибкостью. Поэтому, чтобы снизить жесткость, т.е. повысить гибкость крыла, необходимо разбить крыло на два или более узких крыла (назовем эти крылья «перьями» по аналогии с крылом птицы), т.е. потребная площадь крыла, необходимая для полета, разбивается на два или большее количество меньших по площади, но с тем же размахом крыльев. Таким образом появляется несколько крыльев (перьев) с меньшей площадью и, следовательно, меньшим поперечным сечением продольных силовых элементов (лонжеронов), но с тем же размахом, т.е. с большим удлинением λ составляющих сегментов, что увеличивает его гибкость и, в дополнение, аэродинамическое качество каждого такого крыла (пера). Эти крылья (перья) скреплены в середине размаха крыла и совершают машущие движения одновременно, т.е. синхронно, как одно крыло.
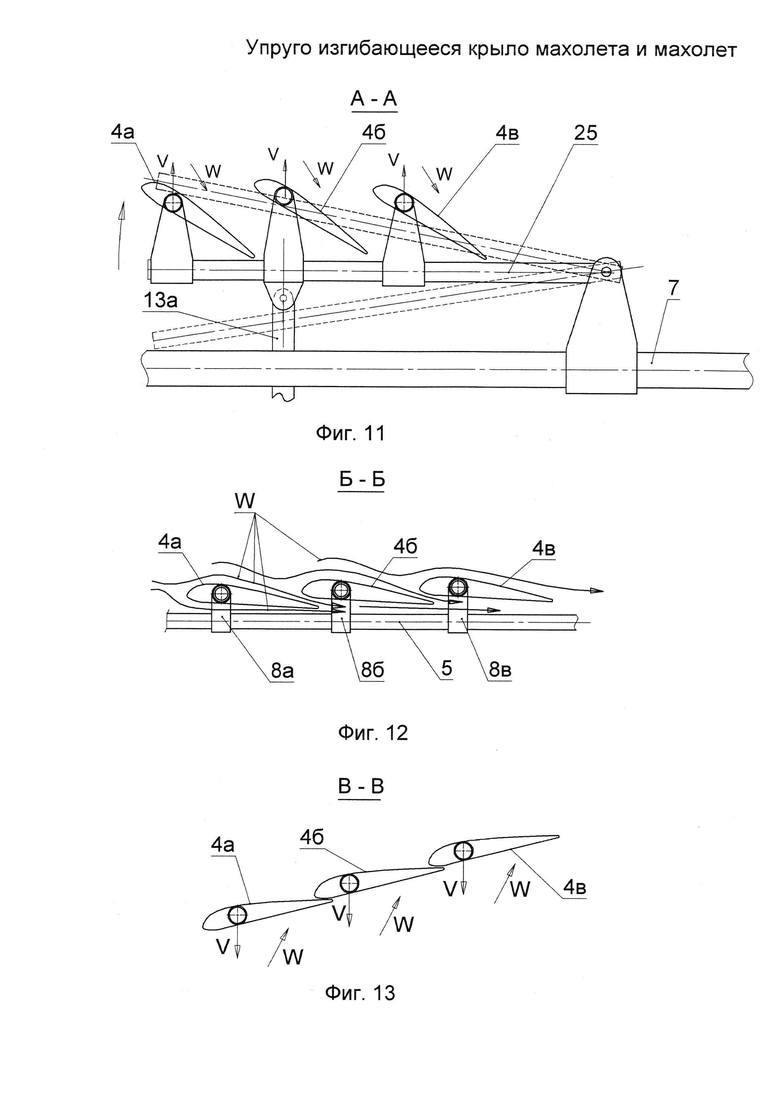
При машущем движении такого многоперьевого крыла возникает взаимодействие между ними, которое улучшает аэродинамику машущего полета. Рассмотрим это взаимодействие на конкретном примере. Машущая поверхность состоит из 3-х таких крыльев (перьев), которые расположены таким образом, что носок аэродинамического профиля второго (заднего) крыла (пера) надвинут сверху на заднюю кромку переднего крыла, так что перекрытие может составлять не менее 5% длины хорды крыла, а зазор между нижним и верхним крылом - не менее 0,5% от длины его хорды. Аэродинамический профиль третьего крыла (пера) таким же образом перекрывает профиль второго крыла (пера). При махе вниз консольных частей 3-перьевого крыла (фиг. 13) аэродинамические профили каждого пера, поворачиваясь от действия набегающего потока воздуха, уменьшают угол атаки, но на меньший угол, как это было бы в одиночном пере, т.к. они ограничиваются сверху надвинутым на него профилем заднего пера. Таким образом в создании подъемной силы участвует большая площадь консольных частей 3-перьевого крыла (из-за меньшего угла поворота профилей перьев). А в это время (фиг. 11) центральная часть перьев поднимаются вверх (отрицательная подъемная сила). Профили каждого пера под действием набегающего потока воздуха отгибаются вниз (уменьшая угол атаки) больше, т.к. ничто им не мешает, поскольку угол ограничен только упругостью оболочки аэродинамического профиля пера. Общая аэродинамическая площадь центральной части перьев при этом уменьшается, т.е. отрицательная подъемная сила также становится меньше, но горизонтальная тяга продолжает прирастает.
В результате при любом махе (вверх или вниз) поверхностей машущего многоперьевого крыла положительная подъемная сила превалирует над отрицательной, а горизонтальная тяга всегда положительна, т.е. действует по направлению полета махолета. Таким образом появилась новая составная аэродинамическая поверхность, которая позволяет значительно улучшить эффективность маховых движений. Для управления во время полета по крену имеются элероны, а по направлению и высоте - хвостовое оперение. Элероны установлены позади машущих крыльев на заднем лонжероне рамы, а хвостовое оперение - в конце центральной балки корпуса. На данном этапе элероны являются наиболее простым решением проблемы управления по крену.
Управление полетом осуществляется традиционным способом как обычным самолетом, т.е. педалями - управление по курсу путем поворота руля направления при помощи жестких тяг, ручкой - управление элеронами с помощью тросовой проводки и рулем высоты с помощь жестких тяг. При этом следует заметить, что органы управления (элероны и хвостовое оперение) эффективно обдуваются потоком воздуха от центральной и консольных частей машущих крыльев независимо от скорости полета махолета и это дает возможность уверенного управления при скоростях, близких к нулю. Махолет может зависнуть в воздухе, но управляемость будет также эффективна, как и при горизонтальном полете.
Применение современных высокопрочных материалов в конструкции крыла в сочетании с предложенной конструкцией позволит на практике осуществить машущий полет такого летательного аппарата. Сейчас на базе сверхлегкого самолета «Альбатрос» АС-3А (см. журнал Авиация общего назначения, №7 2004 г.) создается проект махолета предложенной конструкции (с 3-перьевым крылом).
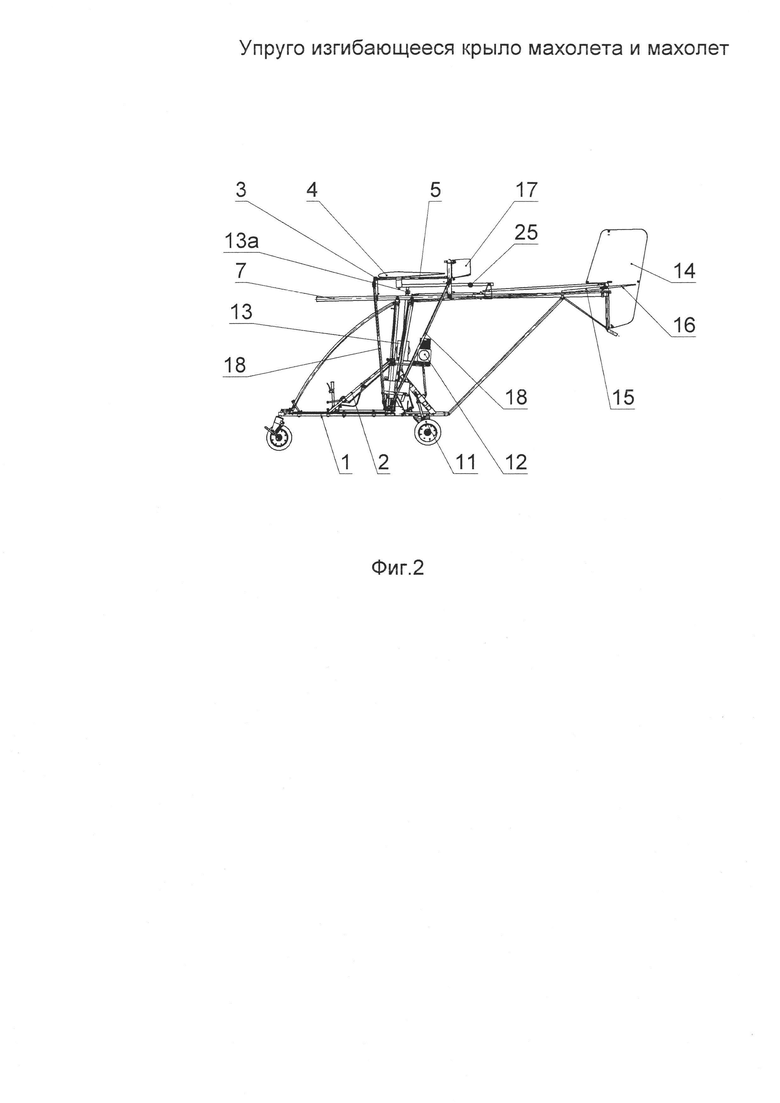
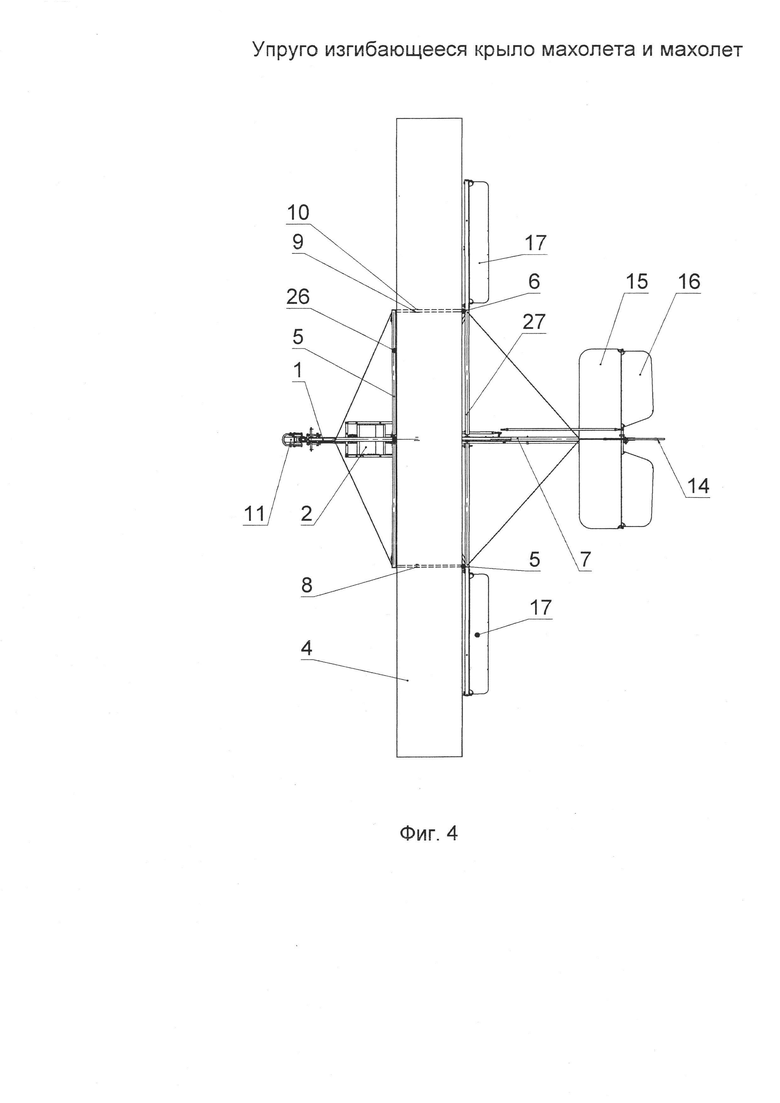
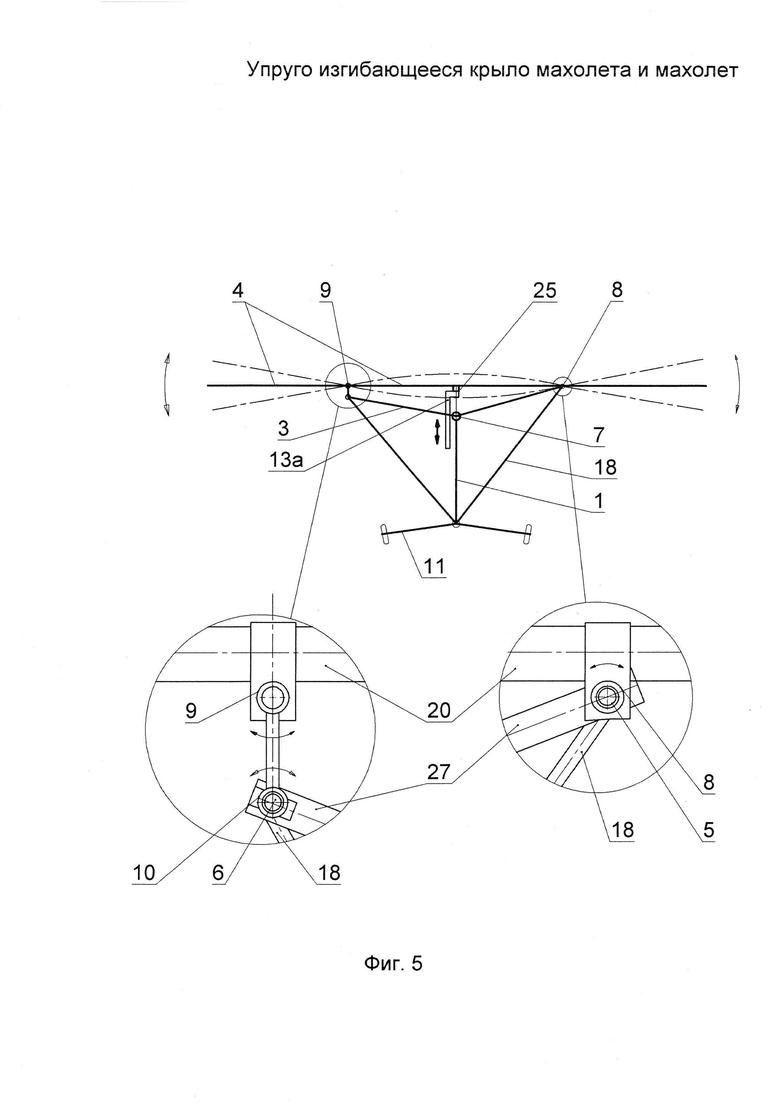
На фиг. 1 показан махолет с одним крылом, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид спереди; на фиг. 4 - то же, вид сверху; на фиг. 5 - схема маховых движений крыла на шарнирных опорах, закрепленных на раме; на фиг. 6 показана конструкция крыла с аэродинамическим профилем, который поворачивается на круглом лонжероне, где А - угол поворота аэродинамического профиля крыла; на фиг. 7 показан махолет с 3-мя крыльями (перьями), общий вид; на фиг. 8 - то же, вид сбоку; на фиг. 9 - то же, вид спереди; на фиг. 10 - то же, вид сверху; на фиг. 11 - сечение центральной части крыльев, движущейся вверх сеч. А-А, где V скорость махового движения, W - вектор воздушного потока; на фиг. 12 - сечение в районе шарниров - сеч. Б-Б, на фиг. 12 - сечение консольной части крыльев, движущейся вниз - сеч. В-В.
Описание махолета с одним упруго изгибающимся крылом (Фиг. 1, 2, 3, 4). Махолет с одним крылом содержит корпус 1 с кабиной пилота 2 и рамой 3, крыло 4, оси 5 и 6, продольную балку 7, шарнирные узлы 8 и 9, дополнительный шарнир 10. На корпусе установлены 3-колесное шасси 11 и регулируемый двигатель 12, передаточный механизм 13 со штоком 13а. На продольной балке установлено хвостовое оперение: руль направления 14, стабилизатор 15 и руль высоты 16. На раме установлены элероны 17. Подкосы 18 крепят концы рамы к нижней части корпуса.
Крыло (Фиг. 6) включает в себя: оболочку 19 и каркас, состоящий из лонжерона 20, носка профиля 21, задней кромки 22, нервюры 23 и шарнира нервюры 24.
Рама включает в себя передние лонжероны 26, задние лонжероны 27, передние растяжки 28, задние растяжки 29. Рама образует жесткий каркас, соединяясь с корпусом 1 посредством подкосов 18, с продольной балкой 7, осями 5 и 6, а также с растяжками 28, 29.
Машущий полет проходит следующим образом. Пилот садится в кабину 2 и включает двигатель 12. Двигатель 12, используя передаточный механизм 13, через шток 13а передает усилие вертикально вверх на лонжерон 20 крыла. В результате этого движения вверх центральная часть крыла движется вверх с отрицательной подъемной силой и поступательной тягой, упруго прогибая лонжерон 20, который закреплен посредством шарнирных узлов крепления 8 и 9, соответственно, на осях 5 и 6 рамы 3 (Фиг. 5). При изгибе логокерона 20 требуется компенсация изменения длины между шарнирными узлами 8 и 9. Компенсация изменения длины лонжерона 20 происходит при помощи дополнительного шарнира 10 (Фиг. 5). Одновременно консольные части крыла 4 двигаются вниз, создавая подъемную силу и поступательную тягу.
Далее усилие от двигателя 12 через шток 13а и лонжерон 20 направляется вниз, увлекая за собой центральную часть крыла 4. В центральной части крыла 4 лонжерон 20 прогибается вниз, поворачиваясь в шарнирных опорах 8, 9, 10, а консоли крыла при этом движутся вверх с отрицательной подъемной силой и поступательной тягой. Таким образом происходит один цикл маховых движений крыла махолета.
Далее циклы маховых движений повторяются с заданной частотой, необходимой для разбега и взлета. Поступательная тяга возникает при любой фазе маховых движений центральной и консольных частей крыла. Используя поступательную тягу в процессе маховых движений крыльев, махолет разбегается, набирает скорость для взлета и взлетает. В горизонтальном полете пилот регулирует частоту оборотов двигателя для выведения упругих колебаний крыльев в резонансный режим как наиболее экономичный с точки зрения затрат мощности двигателя. Управление по крену происходит элеронами 17, по высоте и направлению, соответственно, рулем высоты 16 и рулем направления 14.
Описание махолета с тремя упругоизгибающимися крыльями (Фиг. 7, 8, 9, 10, 11, 12, 13). Махолет содержит корпус 1 с кабиной пилота 2 и рамой 3, первое крыло (перо) 4а, второе - 4б и третье - 4в, оси 5 и 6 вращения шарнирных узлов, продольную балку 7, шарнирные узлы 8а, 9а (фиг. 10) первого крыла (пера), 8б, 9б второго крыла (пера) и 8в, 9в третьего крыла (пера). Одна из шарнирных опор каждого крыла (пера) имеет дополнительный шарнир 10а, 10б, 10в. Крылья (перья) установлены таким образом (фиг. 12), что каждое последующее крыло (перо) установлено сверху с зазором не менее 0,5% и перекрывает предыдущее крыло (перо) на ~5-30% от длины хорды профиля крыла (пера). Это перекрытие может регулироваться в процессе испытаний с целью оптимизации аэродинамики. На корпусе установлено шасси 11, регулируемый двигатель 12, передаточный механизм 13 со штоком 13а. На продольной балке установлено хвостовое оперение: руль направления 14, стабилизатор 15 и руль высоты 16. На раме установлены элероны 17. Маятниковый рычаг 25 одним концом скрепляет лонжероны 20а, 20б, 20в крыльев (перьев) между собой (в середине их размаха), объединяя крылья (перья) в одно 3-перьевое крыло, а другим концом закрепляется на шарнире балки 7.
Машущий полет проходит следующим образом. Пилот садится в кабину 2 и включает двигатель 12. Двигатель 12, используя передаточный механизм 13, через шток 13а передает усилие вертикально вверх на маятниковый рычаг 25, который жестко фиксирует лонжероны 20а, 20б, 20в перьев 4а, 4б, 4в между собой для синхронизации их маховых движений. В результате движения маятникового рычага 25 вверх (фиг. 11) центральная часть перьев 4а, 4б, 4в движется вверх с отрицательной подъемной силой и поступательной тягой, упруго прогибая лонжероны 20а, 20б, 20в, которые закреплены посредством шарнирных узлов 8а и 9а, 8б и 9б, 8в и 9в, соответственно, на осях 5 и 6 рамы 3. Компенсация изменения длины лонжеронов 20а, 20б, 20в при их изгибах происходит соответственно в шарнирах 10а, 10б, 10в (фиг. 5). Одновременно консольные части перьев 4а, 4б, 4в двигаются вниз (фиг. 13), создавая подъемную силу и поступательную тягу.
Далее усилие от двигателя 12 через шток 13а на кронштейн 25 направляется вниз, кронштейн 25 движется вниз, увлекая за собой центральную часть перьев 4а, 4б, 4в. В центральной части перьев 4а, 4б, 4в лонжероны 20а, 20б, 20в прогибаются вниз, поворачиваясь в шарнирных опорах 8а, 9а, и 10а, 8б, 9б, и 10б, 8в, 9в, и 10в, консоли перьев 4а, 4б, 4в при этом движутся вверх с отрицательной подъемной силой и поступательной тягой. Таким образом происходит один цикл маховых движений 3-перьевого крыла махолета. Далее циклы маховых движений повторяются с заданной частотой, необходимой для разбега и взлета.
Можно заметить, что подъемная сила за цикл возникает периодически, но поступательная тяга возникает непрерывно и складывается с тягами от центральной части перьев и их консолей. Поступательная тяга возникает при любой фазе маховых движений центральной и консольных частей 3-перьевого крыла. Используя поступательную тягу и периодическую подъемную силу в процессе маховых движений 3-перьевого крыла, махолет разбегается, набирает скорость для взлета и взлетает. В горизонтальном полете пилот регулирует частоту оборотов двигателя для выведения упругих колебаний 3-перьевого крыла в резонансный режим как наиболее экономичный с точки зрения затрат мощности двигателя. Управление по крену происходит элеронами 17, по высоте и направлению соответственно рулем высоты 16 и рулем направления 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| МАХОЛЕТ | 2011 |
|
RU2467923C1 |
| МАХОЛЕТ | 2008 |
|
RU2369526C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| МАХОЛЁТ | 2014 |
|
RU2578389C1 |
| МАХОЛЕТ | 2016 |
|
RU2659357C2 |
| МАХОЛЕТ | 2012 |
|
RU2488525C1 |







Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов, у которых подъемная сила и тяга создаются при помощи машущих крыльев. Махолет содержит корпус (1), сиденье пилота (2), шасси (11), мотор (12), систему управления и упругогибкое крыло (4), поднятое над корпусом и установленное на шарнирных опорах (8, 9) рамы (3) корпуса, разнесенных симметрично по разным сторонам относительно плоскости симметрии махолета. Шарниры (8, 9) условно разделяют крыло на центральный и наружные сегменты. Расстояние между опорами выбрано таким образом, чтобы консольные части крыла и центральная часть, упруго изгибаясь, колебались в противофазе с разницей максимальных амплитуд не более 15%. Для компенсации изменения длины центральной части крыла в одной из шарнирных опор установлен дополнительный шарнир (10). Машущее усилие от двигателя через передаточный механизм приложено в середине крыла. Достигается повышение управляемости на малых скоростях полета, упрощение конструкции летательного аппарата. 4 з.п. ф-лы, 13 ил.
1. Махолет, содержащий корпус с кабиной пилота, двигатель, шасси, хвостовое горизонтальное и вертикальное оперение, систему управления полетом летательного аппарата, крыло, прикрепленное к корпусу посредством узлов подвески, отличающийся тем, что крыло крепится к раме корпуса посредством двух шарнирных узлов крепления, с осями поворота шарниров, параллельными хорде крыла, условно разделяющих крыло на центральный и наружные сегменты и разнесенных симметрично относительно продольной плоскости симметрии корпуса на расстояние, которое позволяет центральному сегменту упруго изгибаться в вертикальной плоскости под действием знакопеременных вертикальных усилий от двигателя, приложенных в районе середины центрального сегмента, причем для компенсации изменения длины центрального сегмента крыла при его изгибе на одном из двух шарнирных узлов крепления установлен дополнительный компенсирующий элемент, например дополнительный шарнир.
2. Махолет по п. 1, отличающийся тем, что поверхность крыла может скручиваться, т.е. угол атаки хорды профиля середины крыла и концов крыла может отличаться в зависимости от угла атаки набегающего потока воздуха за счет того, что крыло имеет каркас, у которого нервюры могут поворачиваться на шарнире вокруг круглого лонжерона, а оболочка каркаса имеет для этого достаточные эластичность и упругость.
3. Махолет по п. 2, отличающийся тем, что имеет два или более крыла, идентичных по конструкции, способных скручиваться, не касаясь друг друга, и совершающих колебания синхронно как одно крыло, для чего крылья скреплены между собой в середине размаха крыла и в шарнирных узлах крепления крыла.
4. Махолет по п. 3, отличающийся тем, что крылья установлены одно за другим по направлению к хвостовому оперению с перекрытием сверху предыдущего, причем перекрытие может составлять 5-30% от длины хорды профиля крыла.
5. Махолет по п. 3, отличающийся тем, что крылья закреплены в середине размаха на части длины одного конца маятникового рычага, у которого другой конец присоединен к шарниру, установленному на корпусе махолета в направлении хвостового оперения и способному отклоняться в вертикальной плоскости на углы, необходимые для машущих движений крыла.
| СПОСОБ ПЕРЕДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В ВОЗДУШНОЙ СРЕДЕ | 1994 |
|
RU2094319C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| US 4139171 A, 13.02.1979 | |||
| ТОПКА ДЛЯ СЖИГАНИЯ ФРЕЗЕРОВАННОГО ТОРФА | 1929 |
|
SU18859A1 |

