Предлагаемая система позволяет выполнять двухуровневое регулирование. Первый уровень - ручное регулирование параметров работы электровоза, второй - авторегулирование по двум параметрам: току якоря и скорости движения как в режимах тяги, так и в режимах рекуперативного торможения.
Известны устройства, которые могут работать в двухуровневом регулировании. Это блок управления выпрямительно-инверторным преобразователем БУВИП-133 совместно с блоком авторегулирования БАУ-002 на электровозе ВЛ85 [1]. Применение аналоговых элементов и простейших интегральных схем позволило реализовать на этом электровозе достаточно «жесткий» режим работы системы как в режиме тяги, так и в режиме рекуперативного торможения на обоих уровнях регулирования.
Применение микропроцессоров и интегральных схем средней степени интеграции в микропроцессорной системе управления диагностики (МСУД) [2, 3] повысило гибкость системы управления, но потребовало по каждому входному сигналу установить согласующие элементы, преобразующие аналоговые, дискретные, импульсные сигналы в цифровую форму, что существенно отразилось на габаритах и стоимости системы.
Применение микроконтроллеров и интегральных схем большой степени интеграции в микропроцессорной системе управления диагностики (МСУДН) [4, 5] позволило уменьшить габариты и стоимость, однако при этом помехоустойчивость системы понизилась, повысилось количество сбоев.
Наиболее близким заявляемому устройству по технической сущности является микропроцессорный блок управления выпрямительно-инверторным преобразователем БУВИП (М) [6], который и принят за прототип.
Недостатком прототипа является полное исключение из каналов слежения за формой напряжения контактной сети, особенно при высоких нагрузках аналоговых схем и отсутствие второго уровня регулирования - автоуправления, что не позволяет реализовать эффективные приемы управления электровозом.
В предлагаемом устройстве эти недостатки устраняются благодаря тому, что в канале синхронизации, где формируются синхроимпульсы, на аналоговых микросхемах выполняется предварительная обработка фактической формы напряжения синхронизации с использованием фазовой коррекции синхроимпульса. В связи с сильным искажением формы напряжения контактной сети при больших нагрузках напряжение синхронизации может переходить несколько раз через нулевое положение. При этом отсутствие специальной схемы может привести к формированию нескольких синхроимпульсов и сбою в работе системы управления. Обычными аппаратными средствами в настоящее время формируется только один синхроимпульс, даже при нескольких переходах напряжения синхронизации через ноль. Аппаратно реализованная фазовая задержка позволяет формировать «плавающий» синхроимпульс с инерционностью, близкой к инерционности тяговых двигателей, что исключает колебания токов якорей тяговых двигателей.
Для формирования минимально допустимой фазы открытия тиристоров по потенциальным условиям используется компаратор, на первый вход которого подается выходной сигнал схемы ИЛИmin, выделяющий минимальную амплитуду выпрямленного напряжения от датчиков. Датчики следят за напряжением, поступающим на входы ВИП. На второй вход компаратора подается опорное напряжение.
Из-за искажения формы напряжения изменяется время срабатывания компаратора от начала полуволны. По фронту срабатывания компаратора микропроцессор формирует начальный угол открытия тиристоров в соответствии с алгоритмом. В режиме тяги по форме напряжения слежения выделяется длительность первой коммутации, микроконтроллером формируется задержанный на время коммутации импульс и подается по алгоритму на соответствующие плечи ВИП. После прохождения задержанного импульса из напряжения слежения выделяется вторая коммутация, и по ее окончании формируется импульс о завершении процессов в начале полуволны выпрямленного напряжения. Все эти сигналы формируются аппаратно, причем «жестко» проверяется их наличие. При этом микроконтроллер освобождается от этой стандартной работы, сокращается часть программы и увеличивается объем для программы второго уровня управления.
На первом уровне в режиме тяги и рекуперативного торможения микроконтроллер формирует только регулируемые импульсы в зависимости от заданного машинистом напряжения управления и выдает их через усилители на ВИПы в соответствии с алгоритмом.
На втором уровне регулирования используются все схемы обработки сигналов первого уровня. Задатчик напряжения управления ВИП становится задатчиком тока тяговых двигателей, а задатчик напряжения управления ВУВ-задатчиком скорости. Заданные сигналы поступают в микроконтроллер, но воспринимаются другой программой, собирается двухконтурная замкнутая схема авторегулирования по двум параметрам. Сигналы о действительных токах якорей и скорости подаются по цепям обратной связи после предварительной обработки в микроконтроллер. В соответствии с заданием микроконтроллер выбирает зону регулирования и поддерживает заданную машинистом скорость как в режиме тяги, так и в режиме рекуперации.
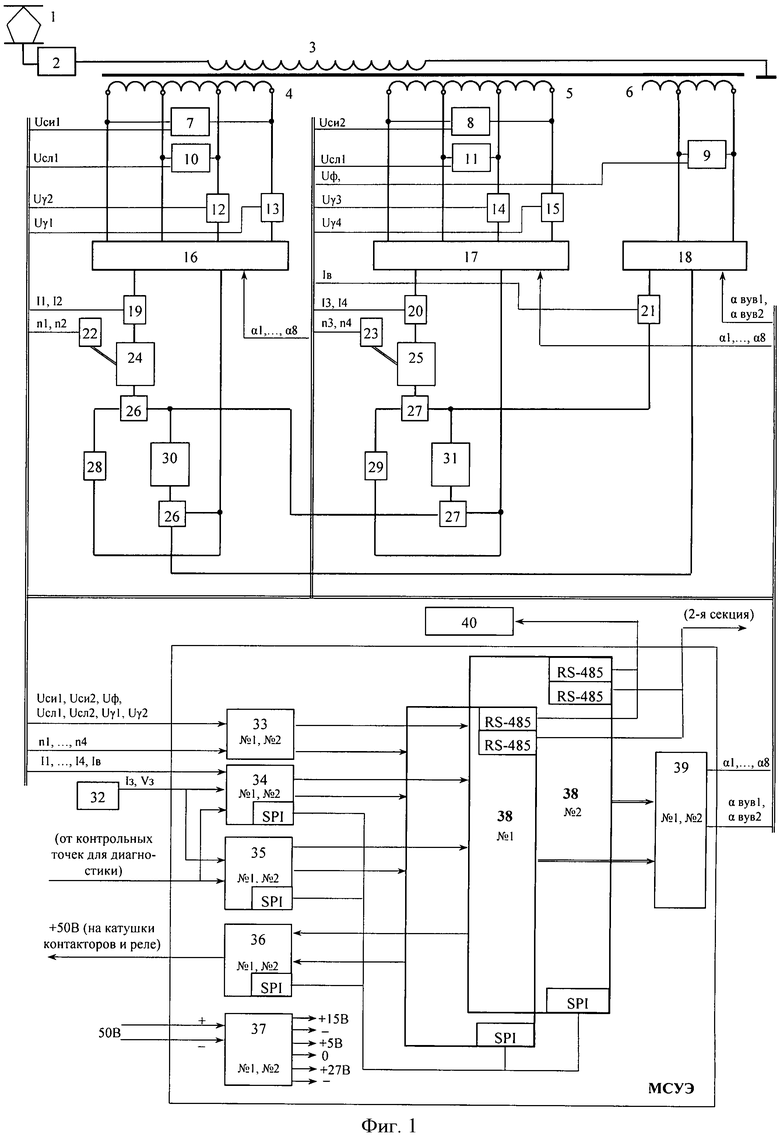
Реализация предложения показана на конкретном примере, где приведена упрощенная схема одной секции электровоза переменного тока с оборудованной двумя ВИПами, одной ВУВ и микропроцессорной системой управления.
На фиг.1 показано: токоприемник 1; главный выключатель 2; первичная 3, вторичные 4, 5 обмотки силового трансформатора и обмотка собственных нужд 6. Напряжение синхронизации Uси1, Uси2, Uф снимается с датчиков 7, 8, 9. Напряжение слежения Uсл1, Uсл2 поступает с датчиков 10, 11. В режиме рекуперации сигналы о длительности углов коммутации Uγ1-Uγ4 формируют датчики 12-15. Выпрямленное напряжение UdВИП подается на каждую пару двигателей 24, 25 от ВИП 16, 17. Питание обмоток возбуждения осуществляется от ВУВ 18. Величина токов якорей тяговых двигателей отслеживается датчиками тока 19, 20, скорости - 22, 23.
Изменение режима тяги на рекуперацию осуществляется контакторами тормозных переключателей 26, 27. Диодно-резисторные схемы 28, 29 осуществляют устойчивость режима рекуперации и защиты от кругового тока. Величину возбуждения тяговых двигателей определяют обмотки возбуждения 30, 31. Заданные сигналы в систему управления поступают от контроллера машиниста 32 как в первом, так и во втором режимах.
Устройство микропроцессорного управления электровозом содержит микропроцессорный комплект с четырьмя группами входов и тремя группами выходов, причем первая группа входов микроконтроллера соединена через блок формирования сигналов 33 с тремя датчиками напряжения синхронизации Uси1, Uси2, Uф и двумя датчиками слежения за формой напряжения сети Uсл1, Uсл2; с четырьмя датчиками тока Iя1-Iя4 и четырьмя датчиками скорости n1-n4; блок питания 37 элементов систем управления подключен к источнику питания цепей управления электровоза; первая группа выходов соединена через усилители с катушками контакторов, реле и т.д.; вторая группа выходов через выходные усилители 39, соединена с управляющими электродами силовых тиристоров в блоках 16, 17, 18; третья группа выходов соединена по интерфейсу RS485 с блоком индикации 40. В отличие от прототипа, в первом блоке 33 размещены аналоговые микросхемы для предварительной обработки поступающей на вход микроконтроллера информации, при этом за счет сокращения объема программы введены: второй и третий входные блоки (34 и 35 соответственно) для авторегулирования по двум параметрам: току якоря и скорости, причем второй блок 34 соединен с задатчиками тока и скорости и датчиками токов якорей, а третий блок 35 - с контрольными точками для диагностирования состояния оборудования; выходной блок 36 для управления аппаратами; блок индикации 40 для отражения рабочей, аварийной и справочной информации.
На основной панели блока индикации 40 отображаются два виртуальных прибора с двумя стрелками для указания: на первом приборе заданного и действительного тока якоря, а на втором приборе - заданной и действительной скорости. В верхней части экрана специальные знаки отражают состояние основных аппаратов защиты. В случае срабатывания каких-либо защит, засвечивается соответствующий сигнал, а на экране выдается подсказка машинисту о мероприятиях по восстановлению работоспособности электровоза.
На других панелях блока индикации отражены на виртуальных приборах токи каждого двигателя, их скорости движения, состояния аппаратов и реле, параметры углов регулирования как в режиме тяги, так и в режиме рекуперативного торможения.
Для повышения надежности все блоки микропроцессорной системы имеют резервные, причем питание их раздельно от блока 37. Переключение блоков происходит автоматически в случае несоответствия отдельных сигналов допустимым значениям.
Таким образом, перевод обработки части информации на аппаратную основу позволил разгрузить микроконтроллер, организовать второй уровень регулирования, существенно уменьшить размеры системы. Например, по сравнению с МСУД, [2, 3] почти в 3 раза, по сравнению с МСУДН, [4, 5] в 2 раза.
Предлагаемая система управления была изготовлена в макетном варианте, затем изготовлен опытный образец, который был испытан на стенде и в опытных поездках на электровозе. После изготовления второго опытного образца электровоз прошел опытную эксплуатацию. После подготовки технической документации система управления была представлена межведомственной комиссии, где после обсуждения была получена рекомендация на выпуск опытной партии.
Источники информации
1. Электровоз ВЛ85. Руководство по эксплуатации / Б.А.Тушканов, Н.Г.Пушкарев, Л.А.Позднятова и др. М.: Транспорт, 1992. - 480 с.
2. Электровоз ЭП1. Руководство по эксплуатации в 2-х т. - Новочеркасск: ООО «ПК» «НЭВЗ», 2008, - Т.1. - 528 с.
3. Электровоз ЭП1. Руководство по эксплуатации в 2-х т. - Новочеркасск: ООО «ПК» «НЭВЗ», 2008, - Т.2. - 576 с.
4. Электровоз магистральный 2ЭС5К. Руководство по эксплуатации в 2-х т. - Новочеркасск: ООО «ПК» «НЭВЗ», 2008, - Т.1. - 635 с.
5. Электровоз магистральный 2ЭС5К. Руководство по эксплуатации в 2-х т. - Новочеркасск: ООО «ПК» «НЭВЗ», 2008, - Т.2. - 640 с.
6. Патент № 2251785, Российская Федерация, МПК Н02M 1/084. Микропроцессорный блок управления выпрямительно-инверторным преобразователем БУВИП (М) / Рабинович М.Д., Сорин Л.Н., Кривной А.М., Кромсков С.А., Плис В.И., Стекольщиков Д.В., Чекмарев А.Е.; заявитель и патентообладатель ЗАО «Отраслевой центр внедрения новой техники и технологии». - заявка 2002128124/09; заявл. 22.10.02; опубл. 10.05.05. Бюл. №2. - 2 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОПРОЦЕССОРНЫЙ БЛОК УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ БУВИП(М) | 2002 |
|
RU2251785C2 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО ТОКОВОЙ ЗАЩИТЫ ББР ЭЛЕКТРОВОЗОВ СЕРИИ ВЛ80Р | 2011 |
|
RU2459717C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ РЕЖИМА РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2370381C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ ТЯГОВЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА НА ЭЛЕКТРОПОДВИЖНОМ СОСТАВЕ | 2007 |
|
RU2344949C1 |
| СПОСОБ ДИАГНОСТИКИ ПЛЕЧ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА ПОД НАГРУЗКОЙ | 2007 |
|
RU2346829C1 |
| БЕЗРЕЛЕЙНАЯ СХЕМА ЦЕПЕЙ УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 2009 |
|
RU2405687C1 |
| СТЕНД ДЛЯ ДИАГНОСТИКИ И ИЗУЧЕНИЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 2009 |
|
RU2400794C1 |
| СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕОСТАТНАЯ И СПОСОБ ЕЕ РАБОТЫ | 2023 |
|
RU2818593C1 |
Изобретение относится к области железнодорожного транспорта и направлено на усовершенствование системы управления транспортными средствами с электротягой и предназначено для использования преимущественно на электроподвижном составе железных дорог переменного тока. Система предназначена для установки как на новые серии электровозов и электропоездов, так и на эксплуатируемые, оборудованные выпрямительно-инверторными преобразователями (ВИЛ) с четырехзонным регулированием напряжения и обеспечивает работу при больших токах нагрузки тяговых двигателей и сильных искажениях формы напряжения контактной сети. В микропроцессорной системе управления электровозом используется один микроконтроллер, с помощью которого реализуются режимы ручного и автоуправления по двум параметрам: току и скорости. При этом часть информации от датчиков до поступления в микроконтроллер предварительно аппаратно обрабатывается, что позволяет расширить диагностические функции системы с отражением информации на блоке индикации. В случае срабатывания защитных аппаратов на экране выдаются рекомендации, следуя которым машинист сокращает время поиска и восстановления работоспособности электровоза. Технический результат заключается в повышении надежности и эффективности управления электровозом. 1 ил.
Устройство микропроцессорного управления электровозом, содержащее микропроцессорный комплект с четырьмя группами входов и тремя группами выходов, причем первая группа входов микроконтроллера соединена через блок формирования сигналов с тремя датчиками напряжения синхронизации и двумя датчиками слежения за формой напряжения сети, с четырьмя датчиками тока и четырьмя датчиками скорости; блок питания элементов систем управления подключен к источнику питания цепей управления электровоза; первая группа выходов соединена через усилители с катушками контакторов, реле, вторая группа выходов через выходные усилители соединена с управляющими электродами силовых тиристоров; третья группа выходов соединена по интерфейсу RS485 с блоком индикации, отличающееся тем, что в первом блоке размещены аналоговые микросхемы для предварительной обработки поступающей на вход микроконтроллера информации, при этом за счет сокращения объема программы введены второй и третий входные блоки для авторегулирования по двум параметрам: току якоря и скорости, причем второй соединен с задатчиками тока и скорости и датчиками токов якорей, а третий - с контрольными точками для диагностирования состояния оборудования; выходной блок для управления аппаратами и блок индикации для отражения рабочей, аварийной и справочной информации.
| МИКРОПРОЦЕССОРНЫЙ БЛОК УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ БУВИП(М) | 2002 |
|
RU2251785C2 |
| Прибор для определения плотности газов | 1933 |
|
SU40027A1 |
| Способ распалубки железобетонных перекрытий | 1937 |
|
SU51948A1 |
| Способ получения эфиров хлортиофосфорной и дихлортиофосфорной кислот | 1950 |
|
SU86533A1 |
| Способ работы тепловоза | 1933 |
|
SU43665A1 |

