Изобретение относится к области космического приборостроения и может быть использовано для сбора данных о параметрах движения космических объектов - частиц космического мусора и микрометеороидов. Известно устройство, содержащее два или более телескопа, находящихся в разных районах Земли, с помощью которого производится регистрация параметров движения космических тел:
1. Столкновение в околоземном пространства (космический мусор). Сб. научных трудов / Под ред. А.Г. Масевича: Космоинформ, 1995, 211 с.);
2. Василенко Г.И. Голографическое опознавание образов. М.: Советское радио, 1977, с.282-283.
Указанные устройства используются в наземных условиях. Наиболее близким решением является детектор (патент на полезную модель №58695. 27.11.2006, Бюл. №33, МПК G01C 3/00).
Недостатком устройства является отсутствие возможности регистрации одиночных объектов на больших расстояниях от космического аппарата.
В качестве прототипа выбрано устройство регистрации параметров микрометеороидов и заряженных частиц ионосферы, содержащее полусферическую мишень, приёмник ионов, усилители, блок измерения, солнечные батареи, плёночные структуры металл-диэлектрик-металл, электромагнитные катушки, блок обработки информации (патент №58696 от 03.07.2008, опубл. 10.12.2008, Бюл №34, МПК G01T 304). В прототипе регистрация микрометеороидов и частиц космического мусора осуществляется на большой площади и использованием в качестве чувствительной поверхности солнечной батареи.
Недостатком прототипа является невозможность сбора данных о параметрах движения космических объектов на различных орбитах полета.
В основу изобретения поставлена задача сбора данных о параметрах движения космических тел - частиц космического мусора и метеороидов, повышения функциональных возможностей.
Поставленная задача достигается тем, что устройство состоит из двух разнесенных в пространстве на базовую длину видеокамер (оптических блоков), смонтированных вдоль одной линии согласно изобретению, состоящее из двух оптических блоков, содержащих объективы с ПЗС-матрицами и блендами, соединенных между собой развертываемой телескопической штангой, вокруг которой расположен цилиндр в виде пленочной структуры металл-диэлектрик-металл, в одном из оптических блоков установлен баллон с химическим отвердителем, соединенный с пьезоэлектрическим натекателем, каждый из оптических блоков снабжен магнитной системой управления в виде магнитометра и трех электромагнитов, расположенных относительно друг от друга взаимно перпендикулярно, а также солнечным датчиком, GPS-приемником, фотодиодами, расположенными на боковых поверхностях, и бортовым компьютером, причем каждый из оптических блоков соединен с двумя солнечными батареями. Телескопическая штанга механически соединена с двумя оптическими блоками диэлектрическими прокладками, причем она находится под отрицательным потенциалом, к внутренней обкладке пленочной структуры металл-диэлектрик-металл приложен положительный потенциал по отношению к ее внешней заземленной обкладке, верхняя обкладка структуры металл-диэлектрик-металл имеет продольный разрыв по всей ее длине, разделяющий структуру на две равные части, причем обе ее половины механически соединены с ПЗС-матрицами, а на внешних поверхностях пленочных структур установлены датчики температуры, соединенные с бортовым компьютером, причем телескопическая штанга и пленочные структуры соединены с усилителем напряжения и заряда. Сущность изобретения поясняется чертежами, где на Фиг.1 изображено устройство в рабочем состоянии, на Фиг.2 - устройство в нераскрытом состоянии (перед отстыковкой от космического аппарата или ракетоносителя).
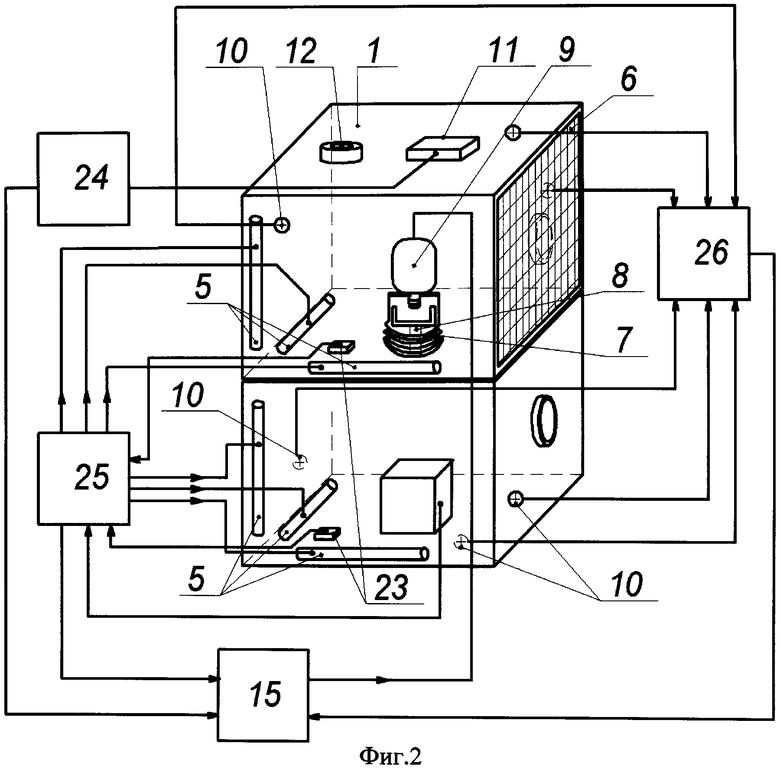
На Фиг.1 показано устройство, содержащее два оптических блока 1 и 2, два объектива с ПЗС-матрицами (λ=0,3-0,6 мкм) и блендами 3 и 4, электромагниты 5 магнитной системы управления, солнечные батареи 6, цилиндр в виде пленочной структуры металл-диэлектрик-металл 7, телескопическая раздвижная штанга 8, баллон с химическим отвердителем 9, фотодиоды 10, солнечный датчик 11, GPS-приемник 12, передатчик 13, антенна передатчика 14, бортовой компьютер 15, датчики температуры 16, источник питания 17, ПЗС-матрицы 18 и 19, усилители напряжения и зарядов 20, 21 и 22, магнитные датчики 23.
Устройство в начальном нераскрытом состоянии, показанное на Фиг.2, содержит преобразователь сигналов 24, блок электроники магнитной системы управления 25, преобразователь сигналов с фотодиодов 26, с фотодиодов 10, бортовой компьютер 15, магнитные датчики 23, солнечную батарею в сложенном состоянии 6, цилиндр пленочной структуры металл-диэлектрик-металл 7 в сложенном состоянии, телескопическую раздвижную штангу 8, баллон с химическим отвердителем и электромагнитным клапаном 9, солнечный датчик 11, приемник GPS 12.
Устройство регистрации частиц космического мусора и микрометеороидов работает следующим образом.
После вывода устройства в космическое пространство с помощью телескопической штанги происходит выдвижение блоков 1 и 2 на расстояние, равное базе L (~5 м). Далее осуществляется выдвижение оптических систем с блендами 3 и 4. Включается магнитная система управления, содержащая в качестве исполнительных элементов электромагниты магнитной системы 5, после чего производится раскрытие солнечных батарей 6. При установке блоков 1 и 2 на расстоянии L друг от друга разворачивается пленочный надувной цилиндр 7, выполненный из майларовой пленки (металл-диэлектрик-металл) с толщиной 30-40 мкм. Это происходит совместно с раздвижением телескопической штанги 8. Пленочный надувной цилиндр 7 механически связан с баллоном 9, содержащим химический отвердитель. При срабатывании пьезоэлектрического натекателя, являющегося частью баллона 9, химическое вещество отвердителя распыляется по внутренним стенкам пленочного надувного цилиндра 7, при его отвердевании повышается механическая прочность.
На гранях блоков регистрации частиц космического мусора 1 и 2 установлены фотодиоды 10, с помощью которых проводится оценка пространственного положения устройства совместно с солнечным датчиком 11, GPS-приемником 12 и исполнительными органами 5 магнитной системы ориентации. Для обработки, передачи информации в устройстве введены передатчик 13, его антенна 14, бортовой компьютер 15, термодатчики 16. Таким образом, после раздвижения блоков 1 и 2, раскрытия солнечных батарей 6 устройство готово к работе, то есть осуществляется первоначальная ориентация устройства в гравитационном поле Земли с помощью указанных обслуживающих систем.
На основе данных навигационного GPS-приемника 12, солнечного 11 и магнитных датчиков 13 (Фиг.2), с помощью формирования соответствующих токов в электромагниты 5 магнитной системы ориентации производится более точная ориентация по трем пространственным осям. Устройство ориентируется таким образом, чтобы солнечный свет не засвечивал видеокамеры, но попадал на солнечные батареи для подзарядки систем питания.
Устройство регистрации может быть ориентировано относительно осей x и у, таким образом видеокамеры могут сканировать в пространстве.
Регистрация частиц космического мусора (космических объектов) производится следующим образом. Свет (солнечный или от дополнительного источника в случае мелких низкоскоростных частиц в окрестности устройства - малого космического аппарата), отраженный от объекта, попадает на чувствительные элементы (ПЗС - матрицы 18 и 19) видеокамер, видеосигнал с которых обрабатывается в бортовом компьютере 4 (Фиг.2). Сигнал с видеокамер содержит в себе информацию о размере объекта (частицы) в виде яркости ее изображения, а также о его положении в плоскости изображений данной камеры в виде координат сигнала на площадном чувствительном элементе (угловое положение частицы относительно видеокамеры).
В бортовом компьютере 15 на основе изображений двух камер (при известном расстоянии между камерами L - стереобазе) восстанавливаются трехмерные координаты частицы. Базой устройства является телескопическая штанга 8 и пленочный надувной цилиндр. Чем больше расстояние между блоками 1 и 2, тем выше дальность работы устройства. Путем съемки исследующих кадров и их обработки получается последовательность трехмерных кадров движения частиц. При использовании прогнозных алгоритмов количество обрабатываемых кадров резко сокращается (на порядок и более), что позволяет сократить потребности устройства в вычислительной мощности и увеличивает быстродействие.
Для ориентации устройства по вектору магнитного поля Земли сигналы с магнитных датчиков 23 (Фиг.2) поступают в блок электроники. Для определения углового положения устройства относительно Солнца сигналы с солнечного датчика 11 через преобразователь сигналов 24 (Фиг.2) поступают на блок электроники 25 магнитной системы управления и его выходы - на бортовой компьютер 15. Сигналы с фотодиодов 10 поступают на блок-преобразователь сигналов 26 и далее с его выхода на бортовой компьютер 15. Обработка этих сигналов позволяет уточнить пространственное положение устройства.
Регистрация параметров микрометеороидов производится следующим образом. В качестве мишени при регистрации микрометеороидов в устройстве используется пленочный надувной цилиндр 7 (Фиг.1) в виде структуры металл-диэлектрик-металл, на которую от источника постоянного напряжения подается 0+50В (внешняя обкладка структуры заземлена), а на телескопическую штангу 8 подается напряжение -100В. Таким образом, при пробое частицей МДМ-структуры 7 образованные в результате удара ионы под воздействием электрического поля в промежутке 7-8 попадают на телескопическую штангу 8, являющуюся коллектором ионов, и далее заряд ионов Q усиливается усилителем 20. В случае ударного сжатия пленочной структуры 7 (пленочного конденсатора), то есть когда при ударе частицы отсутствует сквозной пробой, измеряется ее проводимость с помощью усилителей 21 и 22. С целью определения направления регистрируемой частицы в верхней обкладке пленочной структуры 7 имеется продольный разрыв, в связи с чем к двум частям пленочного конденсатора подключены усилители 21 и 22.
Пленочные структуры 7 механически соединяются с корпусами ПЗС-матриц с целью обеспечения их терморегулирования. Сброс тепла производится с затененной стороны пленочной структуры. При необходимости подогрева электронных устройств забор тепла может быть произведен с другой половины пленочной структуры, которая нагревается солнечным излучением. Для контроля температуры на пленочных структурах установлены термодатчики 16.
Таким образом, предлагаемое устройство обладает широкими функциональными возможностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ МИКРОМЕТЕОРОИДОВ И КОСМИЧЕСКОГО МУСОРА | 2010 |
|
RU2456639C1 |
| МАЛЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ РЕГИСТРАЦИИ ЧАСТИЦ КОСМИЧЕСКОГО МУСОРА И МИКРОМЕТЕОРОИДОВ | 2015 |
|
RU2598978C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ МИКРОМЕТЕОРОИДОВ И ЧАСТИЦ КОСМИЧЕСКОГО МУСОРА НА ОСНОВЕ МЕТАЛЛИЧЕСКИХ ПОЛОСОК | 2023 |
|
RU2819263C1 |
| Устройство для исследования потоков микрометеороидов и частиц космического мусора | 2015 |
|
RU2610342C1 |
| Способ обнаружения объектов космического мусора и наведения на них космического аппарата с использованием лазерного сканирования пространства | 2023 |
|
RU2813696C1 |
| Устройство для измерения пространственной плотности микрометеороидов и частиц космического мусора | 2016 |
|
RU2658072C2 |
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
| БОРТОВОЙ ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ ДЛЯ УЛАВЛИВАНИЯ, СБОРА, РЕГИСТРАЦИИ И ИЗМЕРЕНИЯ ПАРАМЕТРОВ МЕТЕОРОИДНЫХ И ТЕХНОГЕННЫХ ЧАСТИЦ, МЕЖЗВЕЗДНОЙ И МЕЖПЛАНЕТНОЙ ПЫЛИ, А ТАКЖЕ РЕГИСТРАЦИИ ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ, ВОЗДЕЙСТВУЮЩИХ НА КОСМИЧЕСКИЙ АППАРАТ И ПЛАНЕТОХОД-РОВЕР | 2012 |
|
RU2505462C1 |
| УСТРОЙСТВО РЕГИСТРАЦИИ МИКРОМЕТЕОРОИДОВ И ЧАСТИЦ КОСМИЧЕСКОГО МУСОРА | 2011 |
|
RU2476908C2 |
| ДЕТЕКТОР КОСМИЧЕСКОЙ ПЫЛИ | 1997 |
|
RU2134435C1 |
Изобретение относится к области космического приборостроения и может быть использовано для сбора данных о параметрах движения космических объектов - частиц космического мусора и микрометеороидов. Техническим результатом заявленного изобретения является создание устройства регистрации частиц космического мусора и микрометеороидов. Устройство регистрации частиц космического мусора и микрометеороидов состоит из двух или трёх разнесённых в пространстве на базовую длину видеокамер. Видеокамеры смонтированы вдоль одной линии и обеспечивающих блоков с солнечными батареями, объективами с ПЗС-матрицами и блендами. Блоки соединены между собой движущейся телескопической штангой, вокруг которой расположен цилиндр в виде плёночной структуры металл-диэлектрик-металл. В одном из оптических блоков установлен баллон с химическим отвердителем, каждый из оптических блоков снабжен магнитной системой управления в виде магнитометра и трёх электромагнитов, а также солнечным датчиком, GPS-приёмником, фотодиодами, расположенными на боковых поверхностях, и бортовым компьютером. Предложенное устройство позволяет решать различные задачи, связанные с исследованием частиц космического мусора и микрометеороидов, и обладает широкими функциональными возможностями. 1 з.п. ф-лы, 2 ил.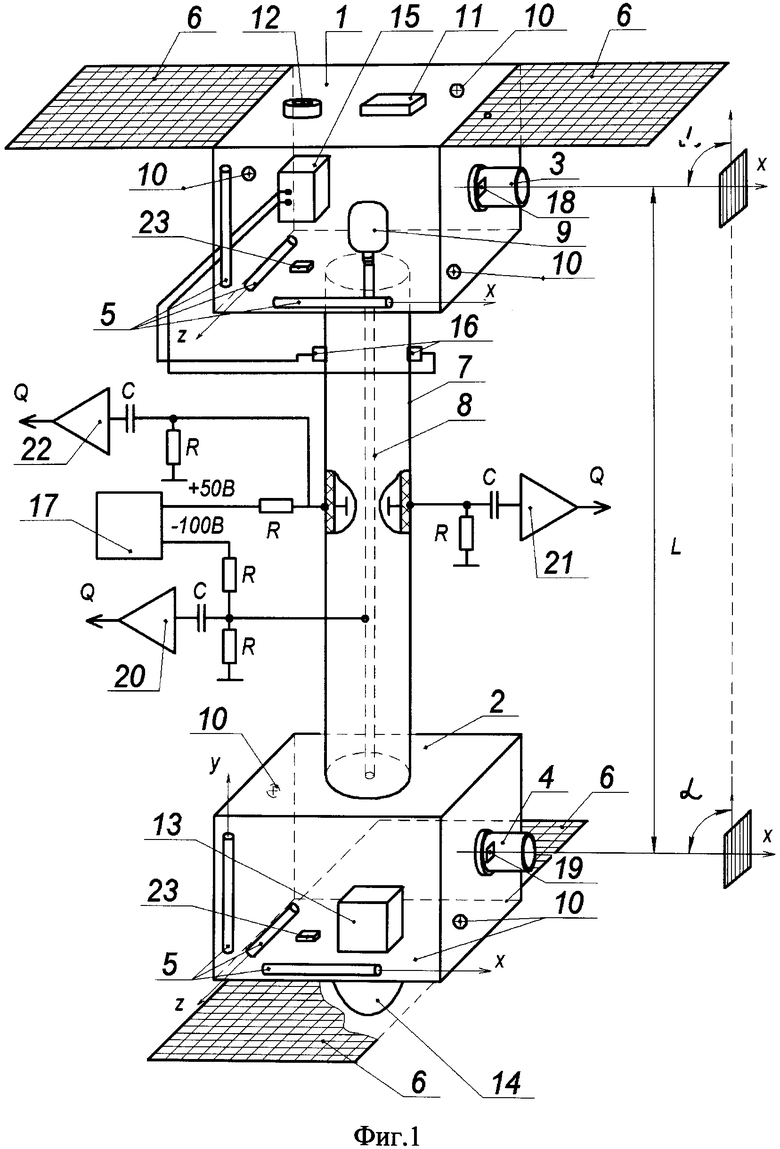
1. Устройство регистрации частиц космического мусора и микрометеороидов, состоящее из двух разнесенных в пространстве на базовую длину видеокамер (оптических блоков), смонтированных вдоль одной линии, отличающееся тем, что оно состоит из двух оптических блоков с солнечными батареями, содержащих объективы с ПЗС-матрицами и блендами, соединенных между собой движущейся телескопической штангой, вокруг которой расположен цилиндр в виде пленочной структуры металл-диэлектрик-металл, в одном из оптических блоков установлен баллон с химическим отвердителем, соединенный с пьезоэлектрическим натекателем, каждый из оптических блоков снабжен магнитной системой управления в виде магнитометра и трех электромагнитов, расположенных относительно друг от друга взаимно перпендикулярно, а также солнечным датчиком, GPS-приемником, фотодиодами, расположенными на боковых поверхностях, и бортовым компьютером, причем каждый из оптических блоков для электроснабжения соединен с двумя солнечными батареями.
2. Устройство по п.1, отличающееся тем, что телескопическая штанга механически соединена с двумя оптическими блоками диэлектрическими прокладками, причем она находится под отрицательным потенциалом, к внутренней обкладке пленочной структуры металл-диэлектрик-металл приложен положительный потенциал по отношению к ее внешней заземленной обкладке, верхняя обкладка структуры металл-диэлектрик-металл имеет продольный разрыв по всей ее длине, разделяющий структуру на две равные части, причем обе ее половины механически соединены с ПЗС-матрицами, а на внешних поверхностях пленочных структур установлены датчики температуры, соединенные с бортовым компьютером, причем телескопическая штанга и пленочные структуры соединены с усилителями напряжения и заряда.
| МНОГОПРОЛЕТНЫЙ МОСТ | 1939 |
|
SU58695A1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ | 1998 |
|
RU2137160C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 2001 |
|
RU2196358C2 |
| EP 1344100 B1, 10.05.2006 | |||
| US 5963166 A1, 05.10.1999. | |||

