Предлагаемая система относится к системам сигнализации и может быть использована для управления транспортным парком, контроля за состоянием подвижных объектов и их перемещением в реальном масштабе времени, охраны стационарных и мобильных объектов, а также мониторинга окружающей среды.
Известны системы безопасности, навигации и мониторинга (авт. свид СССР 642759, 842920, 849257, 864318, 924735, 929386, 1070594, 1070595, 1196620, 1170478, 1647615, 1693620, 1751795, 1755310, 1780080; патенты РФ 2032220, 2053561, 2058592, 2122239; патенты США 4023163, 4751499, 4742338, 5504482, 5648770; патенты Великобритании 1267040, 2279792, 2279478; патенты Франции 2199151, 2415840; патенты Японии 50-59431, 50-66595 и другие).
Из известных систем наиболее близкой к предлагаемой является "Система безопасности, навигации и мониторинга" ( патент РФ 2122239, G 08 В 25/10,1998), которая и выбрана в качестве ближайшего аналога.
Известная система является универсальной системой, схемное выполнение которой позволяет оперативно перепрограммировать и изменять порядок функционирования блоков и всей системы в зависимости от выполняемых ею функций. Система держит диспетчерский центр и аппаратуру потребителя, включающую навигационный приемник с антенной, трансивер с антенной, клавиатуру и модем, связанный с трансивером, телекамеру видеоконтроля, аудиосистему и телемонитор, в систему входит бортовой компьютер, связанный с процессором, аналого-цифровым преобразователем видеосигналов, цифроаналоговыми преобразователями аудиосигналов и видеосигналов, запоминающее устройство, телекамера видеоконтроля и телемонитор. К интерфейсу бортового компьютера подключены также охранные датчики. Диспетчерский центр связан с аппаратурой потребителя через антенну трансивера посредством радиоканала. Питающие входы навигационного приемника, модема, трансивера, бортового компьютера, телекамеры видеоконтроля, телемонитора и охранных датчиков подключены к блоку автономного питания.
Основные свойства и режимы работы известной системы позволяют использовать данное изобретение широкому кругу пользователей - от владельца транспортных средств до частных и государственных учреждений и организаций, осуществляющих охрану и обеспечивающих безопасность стационарных и мобильных особо важных объектов, контролировать их состояние и исправное функционирование, а также состояние окружающей среды и ее экологической чистоты. Важнейшей особенностью известного технического решения является наличие компьютеров и их элементов как в составе диспетчерского центра, так и в составе аппаратуры потребителя, что позволяет оперативно перепрограммировать и изменять порядок функционирования блоков и всей системы, чем еще больше может быть расширена сфера применения изобретения.
Однако указанная система в основном только сигнализирует о несанкционированном использовании или хищении транспортного средства, а также обеспечивает изображение на экране монитора следующих данных: местоположение транспортного средства, направление и скорость перемещения, данных технического паспорта, данных о владельце, изображения угонщика, но не обеспечивает оперативного задержания транспортного средства и угонщика, т.е. имеет сравнительно низкую надежность защиты транспортного средства от угона и краж.
Технической задачей изобретения является повышение надежности защиты транспортных средств от угона и краж.
Поставленная задача решается тем, что в систему безопасности, навигации и мониторинга, содержащую аппаратуру потребителя, включающую блок автономного питания и подключенные к нему навигационный приемник с антенной, трансивер с антенной, группу охранных датчиков, аудиосистему, клавиатуру, соединенную с интерфейсом, модем, соединенный с интерфейсом и трансивером, телекамеру видеоконтроля, телемонитор, входы которого соединены с выходами телекамеры видеоконтроля, и бортовой компьютер, содержащий процессор, предназначенный для обработки сигналов от навигационного приемника и охранных датчиков и выработки информационных сигналов для передачи по радиоканалу, интерфейс, соединенный с процессором, навигационным приемником и группой охранных датчиков, запоминающее устройство, соединенное с интерфейсом, аналого-цифровой преобразователь видеосигналов, вход которого подключен к выходу телекамеры видеоконтроля, а его выход подключен к интерфейсу, цифроаналоговый преобразователь аудиосигналов, вход которого соединен с интерфейсом, а его выход подсоединен ко входу аудиосистемы, и цифроаналоговый преобразователь видеосигналов, вход которого соединен с интерфейсом, а его выход подсоединен ко входу телемонитора, а также диспетчерский центр, связанный через антенну трансивера посредством радиоканала с аппаратурой потребителя и включающий блок питания и подключенный к нему навигационный приемник с антенной, сервер контроля охраняемых объектов и связанный с ним компьютер дифференциальной коррекции координат контролируемых объектов, вход которого подключен к выходу навигационного приемника, и по числу наблюдаемых объектов компьютеры средств связи, связанные посредством компьютерной сети с сервером контроля охраняемых объектов, модемы, каждый из которых связан с соответствующим ему компьютером средства связи, и трансиверы, каждый из которых связан с антенной и соответствующим ему модемом, введены в диспетчерском центре последовательно включенные по числу наблюдаемых объектов задающие генераторы и фазовые манипуляторы, вторые входы которых соединены с выходами компьютеров средств связи, а выходы подключены к трансиверам соответственно, причем задающие генераторы и фазовые манипуляторы подключены к блоку питания, в аппаратуру потребителя - последовательно подключенные к трансиверу первый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, узкополосной фильтр, второй перемножитель, второй вход которого соединен с трансивером, фильтр нижних частот, коррелятор, второй вход которого соединен с интерфейсом, пороговый блок, ключ, соединенный с одним выводом обмотки реле, и управляющий выключатель, соединенный с минусовой шиной аккумуляторной батареи и корпусом транспортного средства, второй вывод обмотки реле через выключатель зажигания соединен с плюсовой шиной аккумуляторной батареи, параллельно аккумуляторной батареи через первый замыкающий контакт реле подключены звуковой сигнализатор, исполнительный блок двери и сигнальные габаритные лампы, размыкающий контакт реле включен в цепь питания катушки зажигания, параллельно выключателю зажигания включен второй замыкающий контакт реле.
Структурная схема системы безопасности, навигации и мониторинга изображена на фиг.1. Структурная схема диспетчерского центра представлена на фиг.2. Временные диаграммы, поясняющие работу синхронного детектора фазоманипулированных (ФМн) сигналов, показаны на фиг.3.
Система безопасности, навигации и мониторинга содержит диспетчерский центр 1 и аппаратуру потребителя, включающую навигационный приемник 2 с антенной 3, трансивер 4 с антенной 5, через которую диспетчерский центр 1 посредством радиоканала связан с трансивером 4. В состав аппаратуры потребителя входит также бортовой компьютер 6, содержащий интерфейс 7, процессор 8, входы и выходы которого подключены соответственно к входам и выходам интерфейса 7, аналого-цифровой преобразователь 9 видеосигналов, выход которого подключен к соответствующему входу интерфейса 7. Кроме того, бортовой компьютер 6 содержит связанное с интерфейсом 7 запоминающее устройство 10 и подключенные к соответствующим выходам интерфейса 7 цифроаналоговый преобразователь 11 аудиосигналов и преобразователь 12 видеосигналов. Аппаратура потребителя содержит также связанные с интерфейсом 7 группу охранных датчиков 13 j (j=1, 2, ..., n), клавиатуру 14 и модем 15, связанный с трансивером 4. Кроме того, в состав аппаратуры потребителя входит телекамера 16 видеоконтроля, выход которой подключен ко входу преобразователя 9, аудиосистему 17, соединенную своим входом с выходом преобразователя 11, и телемонитор 18, подсоединенный своими входами соответственно к преобразователю 12 и к телекамере 16 видеоконтроля. Питающие входы навигационного приемника 2, модема 15, трансивера 4, бортового компьютера 6, телекамеры 16 телемонитора 18 и охранных датчиков 13j подключены к блоку 19 автономного питания. К выходу трансивера 4 последовательно подключены первый перемножитель 33, второй вход которого соединен с выходом фильтра 36 нижних частот, узкополосной фильтр 35, второй перемножитель 34, второй вход которого соединен с трансивером 4, фильтр 36 нижних частот, коррелятор 37, второй вход которого соединен с интерфейсом 7, пороговый блок 38, ключ 39, соединенный с одним выводом обмотки 40 реле, и управляющий выключатель 42, соединенный с минусовой шиной аккумуляторной батареи 43 и корпусом транспортного средства. Второй вывод обмотки 40 реле через выключатель зажигания 41 соединен с плюсовой шиной аккумуляторной батареи 43. Параллельно аккумуляторной батареи 43 через первый замыкающий контакт 40.2 реле подключены звуковой сигнализатор 44, исполнительный блок 45 дверей и сигнальные лампы 46-49, размыкающий контакт 40.1 реле включен в цепь питания катушки зажигания, параллельно выключателю зажигания 41 включен второй замыкающий контакт 40.3 реле.
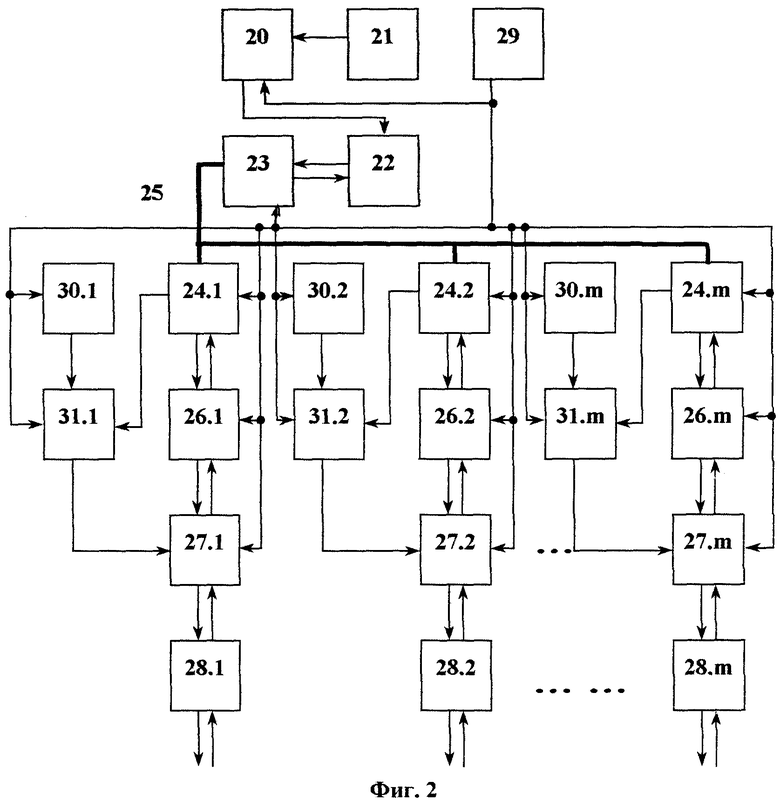
Диспетчерский центр 1 содержит навигационный приемник 20 с антенной 21, компьютер 22 дифференциальной коррекции координат наблюдаемых объектов, вход которого подключен к выходу навигационного приемника 20 и который связан с сервером 23 контроля охраняемых объектов.
Диспетчерский центр 1 содержит также по числу m объектов компьютеры 24.i средств связи, связанные посредством компьютерной сети 25 с сервером 23, модемы 26.i, каждый из которых связан с соответствующим компьютером 24.i, и трансиверы 27.i (i=1, 2, ..., m ). Каждый трансивер 27.i имеет антенну 28. i и связан с соответствующим модемом 26.i. Диспетчерский центр 1 кроме того содержит последовательно включенные задающий генератор 30.i и фазовый манипулятор 31. i (i=1, 2, ..., m ), второй вход которого соединен с выходом компьютера 24. i, а выход подключен к трансиверу 27.i. Питающие входы навигационного приемника 20, компьютера 22, всех компьютеров 24.i, модемов 26.i, трансиверов 27.i, задающих генераторов 30.i и фазовых манипуляторов 31.i (i= 1, 2, ..., m ) подсоединены к блоку 29 питания.
Предлагаемая система работает следующим образом.
Система безопасности, навигации и мониторинга может работать в трех режимах.
Режим автономной навигации транспортного средства (режим А) включается водителем нажатием соответствующих клавиш клавиатуры 14 (фиг.1). При этом блок 19 автономного питания подает напряжение на навигационный приемник 2, бортовой компьютер 6, аудиосистему 17, представляющую собой в режиме А звуковые динамики с усилением промышленного исполнения, телемонитор 18, телекамеру 16.
Кроме того, в более общем случае могут запитываться датчик направления (курса) и датчик пройденного пути, если они установлены на транспортном средстве и входят в состав охранных датчиков 13.j. Затем при помощи клавиатуры 14 через интерфейс 7 устанавливается тот или иной режим работы процессора 8 бортового компьютера 6, который после включения записывает в оперативную память (на фиг.1 не показана) тот или иной программный блок, и запоминающего устройства 10. В режиме автономной навигации бортовой компьютер 6, управляемый процессором 8, может решать задачи в режимах: интерфейсного обмена между бортовым компьютером 6 и навигационным приемником 2, обработки навигационной информации, контроля качества решения навигационных задач, отображения навигационной и служебной информации, сбора и хранения в запоминающем устройстве информации о маршруте движения транспортного средства, решения сервисных задач, обработки действий потребителя системы, звукового сопровождения, начальной инициализации и быстрого старта системы, обработки нештатных ситуаций, автономного контроля исправности блоков, функционирующих в режиме А. Логика взаимодействия блоков в основном - такова: из навигационного приемника 2, имеющего свою антенну 3, через интерфейс 7 в процессор 8 поступают данные о местоположении транспортного средства, которые посылаются в запоминающее устройство 10, из которого карта участка местности, соответствующего координатам транспортного средства, записывается в оперативное запоминающее устройство процессора 8 и через интерфейс 7 и преобразователь 12 поступает на экран телемонитора 18, где отображается вместе со служебной информацией (курс, скорость, режим работы, текущее время, время нахождения на маршруте, координаты и другое). На экране телемонитора 18 вместе с картой местности отображается местоположение транспортного средства и направление его движения.
Вместо телемонитора 18 могут использоваться любые типы компьютерных мониторов, а также жидкокристаллические и электролюминесцентные панели.
Одновременно сопутствующая навигационная информация дополнительно к визуальной форме дублируется аудиосистемой 17 голосом, который преобразуется из цифрового сигнала, поступающего из процессора 8 через интерфейс 7 на преобразователь 11.
Одновременно с отображением на экране телемонитора 18 местоположения транспортного средства и служебной информации при срабатывании соответствующих клавиш клавиатуры 14 через интерфейс 7 в процессор 8 поступает сигнал о включении режима записи и хранения пройденного маршрута. При этом в режиме А информация о местоположении транспортного средства с привязкой ко времени поступает в запоминающее устройство 10, где она хранится и по запросу клавиатуры 14 может быть выдана через интерфейс 7 как на телемонитор 18, так и на периферийные средства (входят в состав системы функционально). Из процессора 8 в запоминающее устройство 10 для запоминания и хранения может также поступать информация о параметрах функционирования системы в режиме А.
Рассмотрим функционирование системы в режиме А при решении задач высокоточной навигации в дифференциальном режиме. Заявка на работу в дифференциальном режиме выдается клавиатурой 14, при этом процессор 8 через интерфейс 7 выдает команду на модем 15 и трансивер 4 на включение и подключение к блоку 19 автономного питания. Запрос о передаче дифференциальных поправок на диспетчерский центр 1 поступает из процессора 8 через интерфейс 7, модем 15, трансивер 4, антенну 5 и затем принимается в диспетчерском центре 1 трансивером 27.i (фиг.2), и имеющим соответствующую антенну 28.i, и через модем 26. i, компьютер 24.i средства связи подается в сервер 23.i (i=1, 2, ..., m ). Предполагается, что диспетчерский центр 1 в это время уже был запитан из блока 29 питания и находится в готовности к приему и передаче информации. По приходу запроса на работу в дифференциальном режиме сервер 23 контроля объектов выдает команду на компьютер 22 дифференциальной коррекции о подготовке дифференциальных поправок на основе обработки навигационных сигналов, поступающих в компьютер 22 дифференциальной коррекции с выхода навигационного приемника 20 диспетчерского центра 1, имеющего собственную антенну 21. Далее информация о дифференциальных поправках из компьютера 22 дифференциальной коррекции поступает в сервер 23, откуда через компьютер 22 средства связи, модем 26.i, трансивер 27.i и антенну 28.i сигналы, несущие информацию о дифференциальных поправках передаются по радиоканалу на антенну 5 трансивера 4 абонента, принимаются трансивером 4 и через модем 15, интерфейс 7 поступают в процессор 8 для совместной обработки с информацией, поступающей от навигационного приемника 2 аппаратуры потребителя.
В составе как аппаратуры потребителя, так и диспетчерского центра 1 в качестве модемов 15 и 26.i, трансиверов 4 и 27.i, антенн 5 и 28.i применяются известные устройства промышленного исполнения, реализующие:
a) телефонную сотовую связь,
b) транкинговую радиосвязь,
c) космическую радиосвязь,
что обеспечивает большую универсальность применения, чем при ограничении, связанном с использованием одного вида связи.
В качестве навигационных приемников 2 и 20 используются известные образцы навигационных приемников, принимающих сигналы как с космических аппаратов системы Глонасс, так и системы Навстар, а также навигационные приемники, обеспечивающие геодезическую точность местоопределения.
Второй режим, который реализуется предлагаемой системой, - режим безопасности (режим Б). Режим Б инициализируется нажатием соответствующих клавиш клавиатуры 14 (фиг.1) и подачей напряжения питания из блока 19 на интерфейс 7, процессор 8, запоминающее устройство 10 и преобразователь 9 бортового компьютера 6, навигационный приемник 2, модем 15 и трансивер 4, телекамеру 16 видеоконтроля, а также на те охранные датчики 13.j, которые требуют электрического питания, при этом транспортное средство становится на охрану. Сигнал о том, что данный абонент поставлен на охрану, формируется процессором 8 и через интерфейс 7, модем 15, трансивер 4, антенну 5 и далее по радиоканалу поступает на диспетчерский центр 1, а именно на антенну 28.i (фиг.2) трансивера 27. i (где i - номер данного абонента, i=1, 2, ..., m, m - число наблюдаемых объектов), далее через трансивер 27.i, модем 26.i и компьютер 24. i на вход сервера 23, который приобщает номер i к списку объектов, находящихся в режиме охраны.
Нейтрализация срабатывания охранных датчиков 13. j (j=1, 2, ..., n) обеспечивается набором хозяином транспортного средства соответствующего кода на клавиатуре 14. При совпадении набранного кода с кодом, хранящимся в памяти компьютера 6, процессор 8 выдает сигнал о снятии с охраны данного абонента, который через интерфейс 7, модем 15, трансивер 4 и антенну 5, далее по радиоканалу поступает в диспетчерский центр 1.
При несанкционированном вскрытии транспортного средства и срабатывании датчиков 13.j (j=1, 2, ..., n, n - количество датчиков) по команде процессора 8 сигнал активации поступает через интерфейс 7 из бортового компьютера 6 в навигационный приемник 2, последний начинает вырабатывать сигналы, несущие информацию о местоположении транспортного средства, которые через интерфейс 7 поступают для обработки в процессор 8. Одновременно телекамера 19 видеоконтроля начинает формировать изображение угонщика, которое преобразуется с помощью преобразователя 9 в цифровую информацию, передаваемую через интерфейс 7 в процессор 8, где подвергается сжатию (например, методом Вейвлет-преобразования) и разбивается на фреймы. Затем с заданным периодом, согласованным со скоростью передачи информации по радиоканалу, информационные сообщения, содержащие навигационную информацию и фреймы изображения, передаются через интерфейс 7, модем 15, трансивер 4, антенны 5 и 28.i, трансивер 27.i, модем 26.i, компьютер 24.i (i=1, 2, ..., m) в сервер 23 диспетчерского центра 1, на экране монитора (на фиг.2 не показан) которого изображаются следующие данные: местоположение транспортного средства, направление и скорость перемещения, данные технического паспорта, данные о владельце, изображение угонщика и другие необходимые данные.
Для обеспечения сохранения ресурса аккумуляторов блока 19 автономного питания все блоки аппаратуры потребителя, за исключением охранных датчиков 13. j (j=1, 2, ..., n), в режиме Б находятся в выключенном состоянии и включаются при срабатывании реле (на фиг.1 не показано), входящего в состав блока 19 автономного питания, в момент постановки и снятия с режима хранения, а также при наступлении экстремальной ситуации угона и поиска транспортного средства.
В качестве телекамеры 16 видеоконтроля в режиме Б может использоваться известная, как правило широкоугольная, миниатюрная камера внутреннего наблюдения с объективом типа pin-hole.
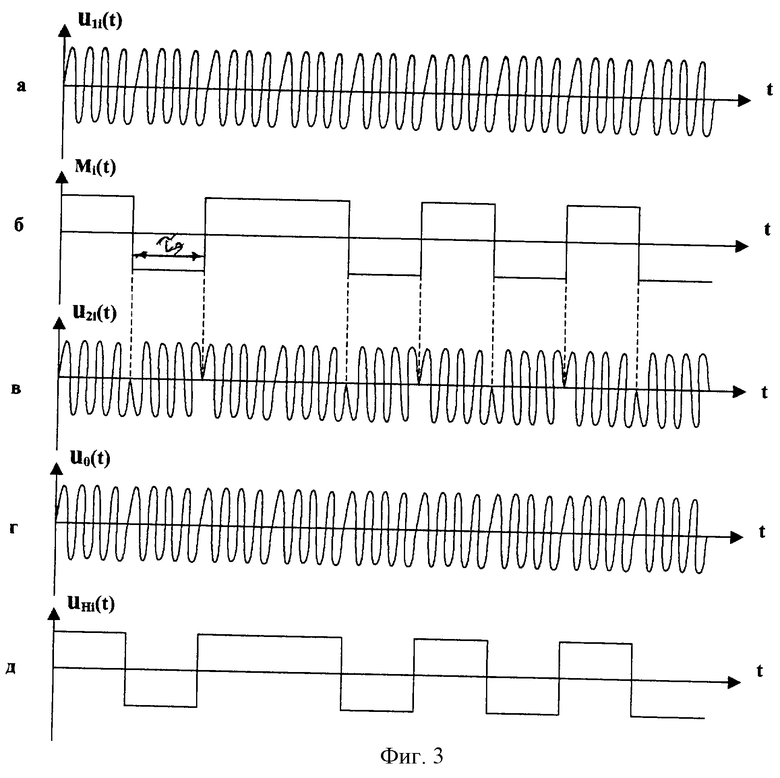
В предлагаемой системе в режиме Б предусмотрена возможность для задержания транспортного средства и угонщика. С этой целью на диспетчерском центре 1 включаются задающий генератор 30.i и фазовый манипулятор 31.i (i=1, 2, . .., m). При этом задающий генератор 30.i формирует гармоническое колебание (фиг.3, а)
U1i(t) = U1•cos(ωit+ϕi), 0≤t≤Ti,
где Ui, ωi,ϕi, Ti - амплитуда, несущая частота, начальная фаза и длительность гармонического колебания;
которое поступает на первый вход фазового манипулятора 31.i, на второй вход которого подается модулирующий код Mi(t) (фиг.3,б) из компьютера 24.i, соответствующий номерному знаку угоняемого транспортного средства. На выходе фазового манипулятора 31. i образуется фазоманипулированный (ФМн) сигнал (фиг.3,в)
U2i(t) = U1•cos[ωit+ϕki(t)+ϕi], 0≤t≤Ti,
где ϕki(t) = {0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом Mi(t), причем ϕki(t) = const при Kτэ < t < (К+1)τэ и может изменяться скачком при t = Kτэ, т.е. на границах между элементарными посылками (К=0,1,2,..., N-1, i=1, 2,... ,m);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Ti (Ti=Nτэ);
который через трансивер 27. i поступает в антенну 28.i и излучается в эфир. Указанный сигнал принимается антенной 5 и через трансивер 4 поступает на первые входы перемножителей 33 и 34. На второй вход перемножителя 34 подается гармоническое напряжение (фиг.3, г)
U0(t) = U0•cos(ωit+ϕi)
с выхода узкополосного фильтра 35. На выходе перемножителя 34 образуется напряжение
U3i(t) = U3•cosϕki(t)+U3•cos[2ωit+ϕki(t)+2ϕi],
где U3=1/2K1UiU0;
К1 - коэффициент передачи перемножителя;
Фильтром 36 нижних частот выделяется низкочастотное напряжение (фиг.3,д)
UHi(t) = U3•cosϕki(t), 0≤t≤Ti,
пропорциональное модулирующему коду Mi(t) (фиг. 3,б). Это напряжение поступает на второй вход перемножителя 33, на выходе которого образуется гармоническое напряжение
U4i(t) = U4•cos(ωit+ϕi), 0≤t≤Ti,
где U4=1/2K1UiU3; U4=U0
Это напряжение выделяется узкополосным фильтром 35 и поступает на второй вход перемножителя 34.
Последовательно соединенные перемножитель 34 и фильтр 36 нижних частот образуют фазовый детектор. Перемножители 33 и 34, узкополосной фильтр 35 и фильтр 36 нижних частот образуют синхронный детектор 32.
Опорное напряжение, необходимое для синхронного детектирования ФМн - сигнала, выделяется непосредственно из принимаемого ФМн - сигнала. При этом данное устройство исключает явление "обратной работы", присущее известным схемам А.А. Пистолькореа, В.И. Сифорова, Г.А. Травина и другим.
Синхронный детектор 32 работает в двух режимах: в переходном и устойчивом. Первый режим возникает при включении устройства, когда за счет переходных процессов в полосу пропускания узкополосного фильтра 35 попадает гармоническое колебание U0(t). В устойчивом режиме узкополосным фильтром 35 выделяется напряжение U4i(t).
Напряжение UHi(t) с выхода фильтра 36 нижних частот поступает на первый вход коррелятора 37, на второй вход которого подается модулирующий код Mi(t) из процессора 8 через интерфейс 7. На выходе коррелятора 37 образуется максимальное напряжение только в том случае, когда модулирующий код Mi(t), записанный в процессоре 8 и соответствующий номерному знаку транспортного средства, совпадает с запросным кодом, передаваемым с диспетчерского центра 1. Следовательно, на запросный код реагирует только угоняемое транспортное средство, модулирующий код Mi(t) которого соответствует его номерному знаку. Максимальное выходное напряжение коррелятора 37 повышает пороговый уровень Uпop в пороговом блоке 38. При превышении указанного уровня (Umax>Unop) в пороговом блоке 38 формируется постоянное напряжение, которое поступает на управляющий вход ключа 39, открывая его. В исходном состоянии ключ 39 всегда закрыт. При этом постоянное напряжение аккумуляторной батареи 43 через замкнутый выключатель 41 зажигания, открытый ключ 39 и замкнутый управляющий выключатель 42 подается на обмотку 40 реле. Такая обстановка возникает, когда угонщик проник в транспортное средство и включил выключатель 41 зажигания с целью угона транспортного средства. Управляющий выключатель 42 устанавливается на транспортном средстве в месте, известном только владельцу. Последний, покидая транспортное средство, замыкает управляющий выключатель 42, обеспечивая режим безопасности транспортного средства. При срабатывании реле размыкается контакт 40.1 и замыкаются контакты 40.2 и 40.3. Разомкнутый контакт 40.1 выключает двигатель, что приводит к остановке транспортного средства, если оно находилось в движении. Замкнутый контакт 40.2 обеспечивает подачу электрического питания на звуковой сигнализатор 44, исполнительный блок 45 дверей и сигнальные габаритные лампы 46-49, установленные на передней и задней панелях кузова транспортного средства. Исполнительный блок 45 блокирует двери транспортного средства. Замкнутый контакт 40.3 блокирует выключатель 41 зажигания.
При этом включенные сигнальные габаритные лампы 46-49 и звуковой сигнализатор 45 являются признаками обнаружения и обозначения угоняемого транспортного средства, а выключенный двигатель и заблокированные двери обеспечивают задержание транспортного средства и угонщика. Эту операцию выполняют работники милиции и ГИБДД, находящиеся в районе местоположения угоняемого транспортного средства или направляемые в этот район по команде с диспетчерского центра 1. Следует также отметить, что постоянно работающие сигнальные габаритные лампы 46-49 и звуковой сигнализатор 45 привлекают внимание не только милиции, но и окружающих людей, что затрудняет угон транспортного средства.
Звуковой сигнализатор 44, исполнительный блок 45 дверей и сигнальные габаритные лампы 46-49 невозможно выключить, отключив выключатель 41 зажигания. Он заблокирован замкнутым контактом 40,3 реле, Для обесточения указанных блоков необходимо выключить управляющий выключатель 42.
Режим видеонаблюдения (режим В) или мониторинга окружающей среды обеспечивается установкой в качестве телекамеры 16 (фиг.1) видеоконтроля аппаратуры потребителя одной из следующего перечня видеокамер промышленного исполнения:
- телекамера переднего (заднего) обзора пространства вокруг мобильного (стационарного) объекта контроля;
- стационарная (мобильная) телекамера кругового обзора видимого или инфракрасного диапазона длин волн на поворотном устройстве;
- телекамера на гироплатформе видимого или инфракрасного диапазона длин волн для установки в основном на мобильных наземных (воздушных) объектах контроля или мобильных наземных (воздушных) средствах контроля окружающей среды.
Режим В включается набором соответствующих клавиш клавиатуры 14, при этом подается питание от блока 19 автономного питания на интерфейс 7, процессор 8 и преобразователь 9 бортового компьютера 6, модем 15, трансивер 4. Телекамера 16 видеоконтроля начинает формировать изображение окружающей среды, которое преобразователем 9 трансформируется в цифровые сигналы, которые через интерфейс 7 поступают в процессор 8, где сжимаются методом Вейвлет-преобразования, разбиваются на фреймы и затем по частям через интерфейс 7, модем 15, трансивер 4, антенны 5 и 28.i, трансивер 27.i, модем 26.i, компьютер 24.i (i=1, 2, ..., m) поступают в сервер 23, который по заданной программе обрабатывает и хранит снимки местности, а также отображает изображение на экране монитора.
Предлагаемая система имеет возможность в режиме В наряду с изображением местности передавать на приемные устройства координаты объекта контроля (аналогично режиму Б). Это особенно важно в случае использования предлагаемой системы в передвижных наземных или летающих экологических лабораториях.
Таким образом, описанные выше основные свойства и режимы работы предлагаемой системы позволяют использовать данное изобретение широкому кругу пользователей - от владельцев транспортных средств до частных и государственных и организаций, осуществляющих охрану и обеспечивающих безопасность стационарных и мобильных особо важных объектов, контролировать их состояние и исправное функционирование, а также состояние окружающей среды и ее экологической чистоты. Важнейшей особенностью предлагаемого технического решения является наличие компьютеров и их элементов как в составе диспетчерского центра, так и в составе аппаратуры потребителя, что позволяет оперативно перепрограммировать и изменить порядок функционирования блоков и всей системы, чем еще больше может быть расширена сфера применения изобретения.
Преимущество предлагаемой системы по сравнению с прототипом и другими аналогичными системами заключается в повышении надежности защиты транспортных средств от угона и краж. Это достигается задержанием транспортного средства и угонщиков. С этой целью на диспетчерском центре при получении тревожной информации формируется управляющий фазоманипулируемый (ФМн) сигнал на определенной частоте, который принимается угнанным транспортным средством и используется для включения звукового сигнализатора, сигнальных габаритных ламп, исполнительного блока дверей и выключения двигателя. Причем включение звукового сигнализатора и сигнальных габаритных ламп служат признаком обнаружения угнанного транспортного средства, а выключенный двигатель и заблокированные двери обеспечивают задержание транспортного средства и угонщика.
Для каждого наблюдаемого транспортного средства отводятся определенные несущая частота и модулирующий код, соответствующий номерному знаку.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2000 |
|
RU2185298C2 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2264934C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2262457C1 |
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 2005 |
|
RU2297046C1 |
| СИСТЕМА МОНИТОРИНГА ПОДВИЖНЫХ РЕКЛАМНЫХ ОБЪЕКТОВ | 2004 |
|
RU2279139C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180293C2 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
Изобретение относится к системам сигнализации и может быть использовано для управления транспортным парком, контроля за состоянием подвижных объектов и их перемещением в реальном масштабе времени, охраны стационарных и мобильных объектов, а также мониторинга окружающей среды. Техническим результатом изобретения является повышение надежности защиты транспортных средств от угона и краж. Система содержит выполненные с возможностью связи диспетчерский центр и аппаратуру потребителя, содержащую бортовой компьютер, интерфейс, процессор, аналого-цифровой преобразователь видеосигналов, запоминающее устройство, цифроаналоговый преобразователь аудиосигналов, преобразователь видеосигналов, группу охранных датчиков, клавиатуру, модем, телекамеру видеоконтроля, аудиосистему, телемонитор, блок автономного питания. Диспетчерский пункт включает компьютер дифференциальной коррекции координат наблюдаемых объектов, сервер контроля охраняемых объектов, компьютеры средств связи, компьютерную сеть, модемы, трансиверы с антеннами, блок питания, задающие генераторы, звуковой сигнализатор, исполнительный блок дверей, сигнальные габаритные лампы. 3 ил.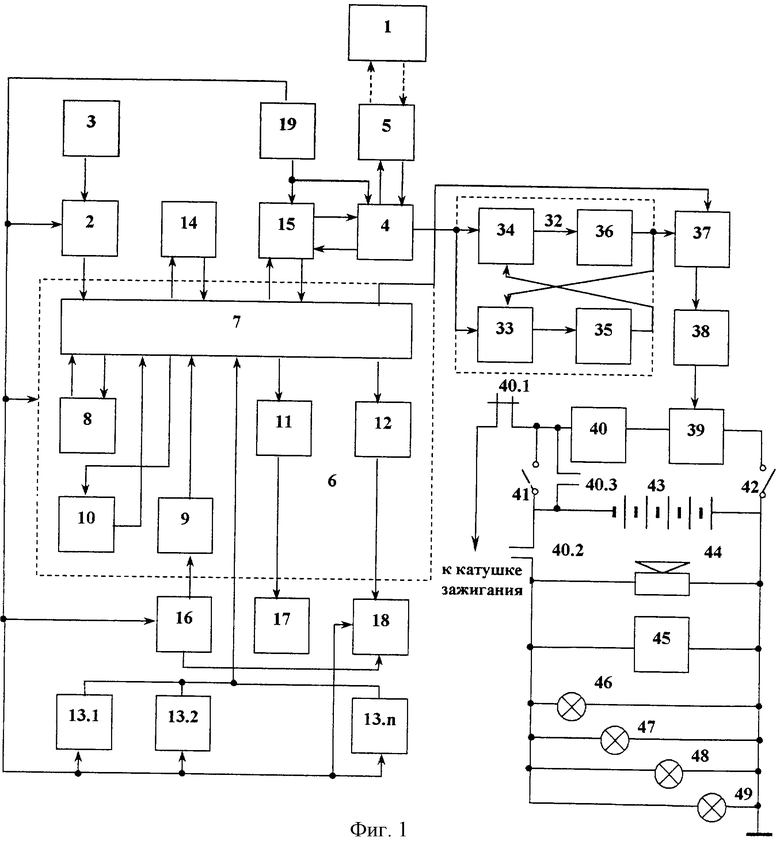
Система безопасности, навигации и мониторинга, содержащая аппаратуру потребителя, включающую блок автономного питания и подключенные к нему навигационный приемник с антенной, трансивер с антенной, группу охранных датчиков, аудиосистему, клавиатуру, соединенную с интерфейсом, модем, соединенный с интерфейсом и трансивером, телекамеру видеоконтроля, телемонитор, входы которого соединены с выходами телекамеры видеоконтроля, и бортовой компьютер, содержащий процессор, предназначенный для обработки сигналов от навигационного приемника и охранных датчиков и выработки информационных сигналов для передачи по радиоканалу, интерфейс, соединенный с процессором, навигационным приемником и группой охранных датчиков, запоминающее устройство, соединенное с интерфейсом, аналого-цифровой преобразователь видеосигналов, вход которого подключен к выходу телекамеры видеоконтроля, а его выход подключен к интерфейсу, цифроаналоговый преобразователь аудиосигналов, вход которого соединен с интерфейсом, а его выход подсоединен ко входу аудиосистемы, и цифроаналоговый преобразователь видеосигналов, вход которого соединен с интерфейсом, а его выход подсоединен ко входу телемонитора, а также диспетчерский центр, связанный через антенну трансивера посредством радиоканала с аппаратурой потребителя и включающий блок питания и подключенный к нему навигационный приемник с антенной, сервер контроля охраняемых объектов и связанный с ним компьютер дифференциальной коррекции координат контролируемых объектов, вход которого подключен к выходу навигационного приемника, и по числу наблюдаемых объектов компьютеры средств связи, связанные посредством компьютерной сети с сервером контроля охраняемых объектов, модемы, каждый из которых связан с соответствующим ему компьютером средства связи, и трансиверы, каждый из которых связан с антенной и соответствующим ему модемом, отличающаяся тем, что в нее введены в диспетчерском центре последовательно включенные по числу наблюдаемых объектов задающие генераторы и фазовые манипуляторы, вторые входы которых соединены с выходами компьютеров средств связи, а выходы подключены к трансиверам соответственно, причем задающие генераторы и фазовые манипуляторы подключены к блоку питания, в аппаратуру потребителя - последовательно подключенные к трансиверу первый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, узкополосной фильтр, второй перемножитель, второй вход которого соединен с трансивером, фильтр нижних частот, коррелятор, второй вход которого соединен с интерфейсом, пороговый блок, ключ, соединенный с одним выводом обмотки реле, и управляющий выключатель, соединенный с минусовой шиной аккумуляторной батареи и корпусом транспортного средства, второй вывод обмотки реле через выключатель зажигания соединен с плюсовой шиной аккумуляторной батареи, параллельно аккумуляторной батареи через первый замыкающий контакт реле подключены звуковой сигнализатор, исполнительный блок двери и сигнальные габаритные лампы, размыкающий контакт реле включен в цепь питания катушки зажигания, параллельно выключателю зажигания включен второй замыкающий контакт реле.
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| US 4023163 А, 10.05.1977 | |||
| US 5648770 А, 15.07.1997 | |||
| ФАКТОРЫ, ДЕЙСТВУЮЩИЕ НА АКТИВНОСТЬ ФЕРМЕНТА, ВЫСВОБОЖДАЮЩЕГО РЕЦЕПТОР ФАКТОРА НЕКРОЗА ОПУХОЛЕЙ | 1999 |
|
RU2279478C2 |
| 3,5-ЗАМЕЩЕННЫЕ ПИПЕРИДИНЫ, КАК ИНГИБИТОРЫ РЕНИНА | 2006 |
|
RU2415840C2 |
