Изобретение относится к сейсмической разведке и может быть использовано для построения изображений сложно построенных сред в виде динамического глубинного K(x, h) и/или тотального (совокупного) временного разреза T(x, t) трансформацией сигналов предварительного глубинного разреза A(x, h).
Временной разрез является частным случаем поля времен, зарегистрированного способом многократного профилирования, при котором расстояние между источником и приемником равно нулю [Сейсморазведка. Справочник геофизика. - М.: Недра, 1981, с.85] /1/. Временной разрез, полученный по способу метода общей глубинной точки (МОГТ), необходим в первую очередь для получения атрибутов прямых поисков нефти и газа [Бондарев В.И. Сейсморазведка (учебник). Екатеринбург. 2007. с.467-482] /2/, обеспечения фильтрации, динамической и спектральной обработки сигналов, корреляции волн.
Однако при использовании МОГТ для построения разрезов сложно построенных сред с наклонными и криволинейными границами раздела последние на временном разрезе отображаются со сносом относительно их истинного расположения и не обеспечивают подобия временного разреза по отношению к глубинному. Поэтому более 50% скважин для добычи нефти и газа оказываются пустыми. Для исключения сноса из временного разреза изредка удается получить малодостоверный глубинный разрез посредством применения процедур миграции, однако ситуации с малодостоверным прогнозом нефтегазоносности это не спасает.
Известный способ, защищенный патентом №2415449 от 27 марта 2011 г. /3/, «Способ построения сейсмического глубинного разреза», имеющий общность с заявляемым способом по совокупности признаков, обеспечивает высокую достоверность и точность отображения сейсмических объектов и сред большой сложности в виде глубинного разреза A(x, h). В связи с большой сложностью изложения предлагаемого изобретения сущность способа далее излагается посредством применения более формализованных названий накоплений сигналов в виде функционалов и математических обозначений и состоит в том, что для получения изображения сейсмического глубинного разреза A(x, h) каждую отображаемую точку (ОТ) последовательно наносят на глубинный разрез вдоль столбцов и/или строк с заданным шагом по осям координат в результате обзора интенсивности волнового поля An(x, t) в этой ОТ на n сейсмограммах, зарегистрированных способом многократного профилирования. Обзор производят методом лучевого трассирования и поиском сигналов сейсмических границ, возможно пересекающих/вмещающих ОТ и принадлежащих одному из q заданных ракурсов объекта (сейсмогеологической модели); для каждого ракурса объекта при априорно заданном скоростном разрезе для каждой из n сейсмограммы строят q виртуальных годографов заданного типа волны в соответствии с трассами хода лучей вторичных волн, возможно исходящих из ОТ и прилегающей к ОТ последовательности из m точек вдоль падающей в ОТ под углом α границы, после чего из каждого цуга колебаний до и после маркерных отметок времен прихода лучей вдоль каждого годографа осуществляют псевдосинфазное считывание и накопление по ρ (обычно ρ≤20) отсчетов амплитуд сигналов в виде функционала Fρ и из каждой из заданного количества m цугов колебаний на каждой из n зарегистрированных сейсмограмм псевдосинфазно накапливают по ρ×m сигналов в q суммоцугах (СЦ) и получают функционалы статистической обработки Fρm. Суммарные результаты накоплений в СЦ из n сейсмограмм группируют по признаку принадлежности к каждой из q позиций и после псевдосинфазного суммирования/умножения функционалов Fρm по ρ×m амплитуд колебаний из всех n сейсмограмм для одной и той же позиции объекта получают гиперсигнал (ГС) с ρ×m×n кратностью накоплений в виде функционала Fρmn. Из всех заданных q позиций объекта находят наиболее вероятную путем сравнения функционалов статистической обработки Fρmn и/или Fmn (при n=1) между собой, получают максимум вероятности величины угла наклона и обнаружения Fmax. Последнюю сравнивают с заданным порогом уровня шумов, нормируют с учетом масштаба изображения и отображают точку/отрезок сейсмической границы на глубинном разрезе пропорционально величине Fmax. В необходимых случаях корректируют заданные параметры обзора для достижения максимума величины вероятности обнаружения границы. Подобным способом обзора волнового поля наносят все остальные соседние ОТ на глубинный сейсмический разрез A(x, h) в соответствии с заданным шагом приращений координат.
Наиболее близким к предлагаемому является способ, применяемый при получении изображений сейсмического глубинного разреза, защищенный патентом №2415449 от 27 марта 2011 г. /3/. Данный способ избран в качестве прототипа.
Недостатком этого способа является то, что, автоматизация определения по максимуму вероятности обнаружения достигается лишь в отношении угла наклона в ОТ, в то время как для всей области обработки необходимо априорное задание скоростного разреза. Кроме того, при его применении недостаточно обеспечена необходимая точность и достоверность динамического отображения волнового поля глубинного и тотального (совокупного) временного разреза, недостаточно обеспечено получение качественных атрибутов прямых поисков нефти и газа, результатов пространственной и временной фильтрации, спектральной и динамической обработки сигналов, так как при автокорреляции, корреляции, свертке, вычислениях энергии используются до ρ отсчетов сигналов суммоцугов для каждой фазы после их усреднения, в результате чего исходное волновое поле существенно искажается.
Задачей изобретения является автоматизация определения наиболее вероятной скорости в ОТ, разработка способа, позволяющего обеспечить получение высокодостоверных атрибутов прямых поисков нефти и газа, возможность высокодостоверной динамической спектральной обработки, а также пространственной и временной фильтрации сигналов.
Технический результат состоит в исключении сноса отображаемых на тотальном временном разрезе сейсмических границ относительно их расположения под пунктами регистрации наблюдений, комплексная автоматизация определения угла наклона сейсмических границ и монотонно возрастающей/убывающей скорости в ОТ, повышении диапазона динамических характеристик волнового поля глубинного и тотального временного разрезов.
Предлагаемый способ построения сейсмического динамического глубинного K(x, h) и/или тотального временного разреза T(x, t) и прототип имеют следующие общие признаки.
Для получения изображения предварительного сейсмического глубинного разреза A(x, h) каждую отображаемую точку (ОТ) последовательно наносят на глубинный разрез вдоль столбцов и/или строк с заданным шагом по осям координат в результате обзора интенсивности волнового поля в этой ОТ на n сейсмограммах, зарегистрированных способом многократного профилирования. Обзор производят методом лучевого трассирования и поиском сигналов сейсмических границ, возможно пересекающих/вмещающих ОТ и принадлежащих одному из q заданных ракурсов объекта (сейсмической границы, которая задана в отображаемой точке q ракурсами с определенным шагом поворота Δα угла падения α с центром вращения в отображаемой точке), для каждого ракурса объекта задают множество углов падениия α=±α0±Δα (1, 2, …, q/2, …, q), (где α0 - априорно заданное первоначальное значение угла падения границы в отображаемой точке, Δα - шаг приращения угла падения, q - число пошаговых приращений угла падения), а также предварительно установленной определенной конфигурации сейсмического объекта, для каждого ракурса объекта из n сейсмограмм строят q виртуальных годографов заданного типа волны в соответствии с трассами хода лучей вторичных волн, возможно исходящих из ОТ и прилегающей к ОТ последовательности из m точек вдоль падающей в ОТ под углом α границы, после чего из каждого цуга колебаний до и после маркерных отметок времен прихода лучей вдоль каждого годографа осуществляют псевдосинфазное считывание и накопление по ρ (обычно ρ≤20) отсчетов амплитуд сигналов в виде функционала Fρ и из каждой из заданного количества m цугов колебаний на каждой из n зарегистрированных сейсмограмм псевдосинфазно накапливают по ρ×m сигналов в q суммоцугах (СЦ) и получают функционалы статистической обработки Fρm. Суммарные результаты накоплений в СЦ из n сейсмограмм группируют по признаку принадлежности к каждой из q позиций и после псевдосинфазного суммирования/умножения функционалов Fρm по ρ×m амплитуд колебаний из всех n сейсмограмм для одной и той же позиции объекта получают гиперсигнал (ГС) с ρ×m×n кратностью накоплений в виде функционала Fρmn. Из всех заданных q позиций объекта находят наиболее вероятную путем сравнения функционалов статистической обработки Fρmn и/или Fmn (при n=1) между собой, получают максимум вероятности величины угла наклона и обнаружения Fmax. Последнюю сравнивают с заданным порогом уровня шумов, нормируют с учетом масштаба изображения и отображают точку/отрезок сейсмической границы на глубинном разрезе пропорционально величине Fmax. В необходимых случаях корректируют заданные параметры обзора для достижения максимума величины вероятности обнаружения границы. Подобным способом обзора волнового поля наносят все остальные соседние ОТ на глубинный сейсмический разрез A(x, h) в соответствии с заданным шагом приращений координат.
Отличительные признаки предлагаемого изобретения:
Построение сейсмического динамического глубинного K(x, h) и/или тотального временного разреза T(x, t) производят на основе развертки по столбцам (оси h) и/или строкам (оси х), например энергии отображаемых точек (ОТ) заданного типа волны в пределах предварительного глубинного разреза A(x, h). Для этого в максимальной степени детализируют фазы сейсмических сигналов во временном масштабе следующим образом.
Сначала для каждой отображаемой точки OT(x0, h} в соответствии с процедурами построения дополнительного (предварительного) глубинного разреза A(x, h) осуществляют обзор волновых полей An(x, t) на сейсмограммах, полученных методом многократного профилирования, посредством лучевого трассирования виртуальных годографов на n сейсмограммах, зарегистрированных m сейсмоприемниками (СП), и обеспечивающего засветку под различными углами отображаемых точек из n пунктов воздействий, предполагая наличие сейсмической границы в отображаемой точке, из которой возможно исходят сейсмические волны в соответствии с предварительно заданным множеством скоростей V=V0±ΔV (1, 2, …, υ/2, …, υ), (где V0 - априорно заданное первоначальное значение скорости из заданного массива скоростей V(x, h), x, h - координаты глубинного разреза, ΔV шаг приращения скорости, υ - число шаговых приращений скорости), а также предварительно установленной определенной конфигурации сейсмического объекта, который задан в отображаемой точке q ракурсами с определенным шагом поворота Δα угла падения α с центром вращения в отображаемой точке, для каждого ракурса объекта задают множество углов падения α=±α0±Δα (1, 2, …, q/2, …, q), (где α0 - априорно заданное первоначальное значение угла падения границы в отображаемой точке, Δα - шаг приращения угла падения, q - число пошаговых приращений угла падения), задают координаты отображаемой точки, n пунктов воздействий, m сейсмоприемников и закон (функцию) расположения последовательности из m точек, прилегающих к отображаемой точке; для каждого заданного типа волны строят qυmn виртуальных годографов, производят направленное псевдосинфазное накопление амплитуд многокомпонентных цугов колебаний в суммоцугах на зарегистрированных m сейсмотрассах вдоль маркерных отметок времени на годографах.
Затем в соответствии с процедурами, необходимыми для построения динамических глубинного и тотального (совокупного) временного разрезов для каждого цуга колебаний считывают по единичному отсчету амплитуды фазы, последовательность единичных сигналов ЕС из m цугов колебаний накапливают в виде функционала Km. Для каждого из углов засветки от n пунктов возбуждений массивы из m единичных отсчетов последовательно размещают в n субблоках суммофаз (СФ), в необходимых случаях вносят поправки на угол засветки, определяют область мьютинга, удаляют зашумленные эйконалы. Производят накопления СФ с кратностью mn в виде функционала Kmn.
После этого в соответствии с процедурами, необходимыми для построения дополнительного (вспомогательного) глубинного разреза, из цуга колебаний, зарегистрированного до и/или после маркерных отметок времени, считывают из каждой m-й сейсмотрассы по ρ компонентов (обычно ρ≤20) и накапливают их в виде псевдосинфазных функционалов Fρ; после накопления сигналов, хранящихся в каждом из m функционалов Fρ, их накаплиают по ρm сигналов в суммоцугах (СЦ) в виде функционалов Fρm, затем их группируют по признаку равенства номера ракурса q; для каждой из q групп находят гиперсигнал ГС в виде функционала Fρmn супернакоплениями из ρmn амплитуд после введения известными способами поправок на n углов засветки и мьютинга.
Для каждой ОТ из совокупности множеств скоростей (до υ) и углов наклона (до q) строят двумерную матрицу из элементов Fρm и/или Fρmn, и/или из элементов их энергий  и/или
и/или  , после соответствующих вычислений в зависимости от априорно заданных углов наклона α и априорно заданного множества скоростей V, по столбцам матрицы документируют значения функционалов в зависимости от угла наклона в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят двумерное отображение графика для матриц Fρm и/или Fρmn и/или из значений их энергий
, после соответствующих вычислений в зависимости от априорно заданных углов наклона α и априорно заданного множества скоростей V, по столбцам матрицы документируют значения функционалов в зависимости от угла наклона в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят двумерное отображение графика для матриц Fρm и/или Fρmn и/или из значений их энергий  и/или
и/или  на котором визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов наглядного отображения; график представляют в виде окна обзора достоверности (ООД) и обеспечивают контроль интерпретатора за процессом опознания сейсмических границ и построением сейсмического глубинного разреза; уровень Fρm и/или Fρmn и/или значения их энергий и/или , в пределах окна обзора достоверности сравнивают с заданным порогом обнаружения, при превышении порога обнаружения каждый последующий уровень отображаемого функционала сравнивают с предыдущим, при превышении последующего уровня над предыдущим его документируют в блоке максимума функционала статистической обработки Fmax(υmax, qmax), в котором также хранят соответствующие максимальному уровню аргументы υmax, и qmax, обеспечивающие экстраполяцию текущих значений пластовой скорости и угла падения границ между толщами горных пород и необходимые для следующих процедур построения динамических глубинного и тотального временного разрезов.
на котором визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов наглядного отображения; график представляют в виде окна обзора достоверности (ООД) и обеспечивают контроль интерпретатора за процессом опознания сейсмических границ и построением сейсмического глубинного разреза; уровень Fρm и/или Fρmn и/или значения их энергий и/или , в пределах окна обзора достоверности сравнивают с заданным порогом обнаружения, при превышении порога обнаружения каждый последующий уровень отображаемого функционала сравнивают с предыдущим, при превышении последующего уровня над предыдущим его документируют в блоке максимума функционала статистической обработки Fmax(υmax, qmax), в котором также хранят соответствующие максимальному уровню аргументы υmax, и qmax, обеспечивающие экстраполяцию текущих значений пластовой скорости и угла падения границ между толщами горных пород и необходимые для следующих процедур построения динамических глубинного и тотального временного разрезов.
В соответствии с интерактивным режимом интерпретации единичных ЕС накоплений Km из m фаз вдоль годографа отдельной сейсмограммы и суммофаз Kmn из годографов n сейсмограмм осуществляют (при необходимости) коррекцию заданных диапазонов V, υ и α, q следующим образом. Для каждой из υ скоростей и каждого из q ракурсов строят для каждой ОТ двумерную матрицу из элементов Km и/или Kmn, по столбцам матрицы документируют значения функционалов в зависимости от угла падения в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят отображение графика из матрицы Km(α, V) и/или Kmn(α, V), на котором визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов; график представляют в виде окна обзора достоверности и обеспечивают контроль интерпретатора за процессом опознания заданного типа волны и построением сейсмического глубинного разреза.
После сигнала совпадения, который вырабатывается из схемы разрешения при условии смены в блоке Fmax предыдущего значения максимума на последующий более высокий (при монотонном возрастании скорости с глубиной), а также при экстраполяции значения Fmax для предыдущей ОТ на последующую (при постоянстве пластовой скорости), функционал Kmn или Km заносят в буферный блок суммирования. Накопления из буферного блока суммирования единичных отсчетов амплитуд Km или Kmn засылают в блок рассылки. Из блока рассылки накопления засылают в регистры блока масштабирования, где с учетом шкалы нормировки вырабатывают способ изображения ОТ на динамическом глубинном разрезе K(хОТ, hOT) и способ изображения точки тотальной амплитуды фазы Т(хОТ, hOT) на тотальном временном разрезе T(x, t), которую и засылают на суммотрассу временного разреза. Абсциссу хОТ точки тотальной амплитуды фазы задают в соответствии с абсциссой ОТ на глубинном разрезе, а ординату tOT находят в соответствии с найденной наиболее вероятной величиной скорости VOT из условия обеспечения минимального времени хода восстающего луча из отображаемой точки с коорднатами (х0, h0) до ближайшего, расположенного на профиле наблюдений, регистрирующего сейсмоприемника СП (х0, 0). Обычно при определенных допущениях tOT=h0/VOT. В соответствии с направлением развертки изображают отображаемую точку на дополнительном глубинном разрезе с интенсивностью, пропорциональной величине максимального функционала Fmax заданного типа волны в пределах окна обзора достоверности. Затем выполняют документирование последующих ОТ дополнительного (предварительного) глубинного разреза A(x, h), присваивают Fmax положение F(υ/2, q/2) в центре матрицы окна обзора достоверности и определяют скорректированные значения углов наклона и скоростей по смещению Fmax относительно центра окна обзора достоверности, для чего сравнивают аргументы υ/2 и q/2 с υmax и qmax; величину и знак скорректированных значений для V0 и α0 определяют по разностям:

где индексами i и (i-1) обозначены последующие и предыдущие априорные и текущие начальные значения диапазона изменения скорости и угла падения в отображаемой точке; последовательно в блоке Fmax(υmax, qmax) заменяют в автоматическом режиме предыдущие значения диапазона (α, V) на скорректированные, тем самым размещают F(q(i-1), υ(i-1)) в центр новой скорректированной сетки значений матрицы окна обзора достоверности. При монотонном возрастании скорости с глубиной знак приращения скорости δV должен совпадать со знаком приращения глубины (знаком развертки ОТ по столбцам). С учетом этого условия для всех q×υ углов падения и скоростей присваивают скорректированные значения F(qi, υi), среди них в пределах следующего окна обзора достоверности находят новое текущее значение Fmax, документируют очередные отображаемые точки на динамическом глубинном, тотальном временном и дополнительном глубинном разрезах с интенсивностью, соответствующей величине K(хОТ, hOT), Т(хОТ, hOT) и Fmax соответственно, размещают Fmax вновь в центр очередной скорректированной сетки окна обзора достоверности и так далее до полного построения глубинного сейсмического разреза в соответствии с заданным режимом развертки отображаемых точек по строкам и/или столбцам.
Для дальнейшего увеличения степени достоверности построения динамического глубинного и/или тотального временного разреза из последовательности единичных отсчетов ЕС в блоке рассылки выделяют и засылают в отдельные регистры блока масштабирования промежуточные и полные суммы единичных отсчетов фазы сейсмических сигналов, тем самым обеспечивают возможность составления систем линейно независимых уравнений относительно неизвестной амплитуды сигнала и среднестатистической амплитуды случайной помехи, экстраполируют линейно независимые уравнения для каждой из промежуточных сумм также и на выражения для полной суммы на основе предположения о равенстве математического ожидания случайных помех для полной и частичной последовательности единичных отсчетов, решают уравнения относительно амплитуды линейно возрастающего пропорционально числу слагаемых сигнала и возрастающей в соответствии с корнем квадратным из числа слагаемых среднестатистической амплитуды случайной помехи, документируют на ОТ динамического глубинного разреза и суммотрассах тотального временного разреза найденную высокодостоверную амплитуду свободного от случайной помехи сигнала, используют найденную высокодостоверную амплитуду свободного от помехи сигнала для оценки помехозащищенности во взаимных точках и документирования тотального временного разреза.
Поставленная задача построения сейсмических динамических глубинного K(x, h) и/или тотального временного T(x, t) разрезов решена за счет того, что сначала для каждой отображаемой точки OT(x0, h) в соответствии с процедурами построения дополнительного (предварительного) глубинного разреза A(x, h) осуществляют обзор волновых полей An(x, t) на сейсмограммах, полученных методом многократного профилирования. Обзор реализуют посредством лучевого трассирования виртуальных годографов на каждой из n сейсмограмм, зарегистрированных от n пунктов воздействий по способу многократных перекрытий, на которых находят сейсмотрассы, зарегистрированые m сейсмоприемниками (СП). Предполагают наличие сейсмической границы в отображаемой точке, из которой возможно исходят вторичные сейсмические волны в соответствии с предварительно заданным множеством скоростей V=V0±ΔV (1, 2, …, υ/2, …, υ), (где V0 - априорно заданное первоначальное значение скорости из заданного массива скоростей V(x, h), x, h - координаты глубинного разреза, ΔV шаг приращения скорости, υ - число шаговых приращений скорости), а также предварительно установленной определенной конфигурации сейсмического объекта, который задан в отображаемой точке q ракурсами с определенным шагом поворота Δα угла падения α с центром вращения в отображаемой точке, для каждого ракурса объекта задают множество углов падениия α=±α0±Δα (1, 2, …, q/2, …, q), (где α0 - априорно заданное первоначальное значение угла падения границы в отображаемой точке, Δα - шаг приращения угла падения, q - число пошаговых приращений угла падения), задают координаты отображаемой точки, n пунктов воздействий, m сейсмоприемников и закон (функцию) расположения последовательности из m точек, прилегающих к отображаемой точке; для каждого заданного типа волны строят qυmn виртуальных годографов, в результате этого обеспечивают возможность направленного псевдосинфазного накопления амплитуд вдоль полученных маркерных отметок времени на годографах.
Затем в соответствии с процедурами, необходимыми для построения динамических глубинного и тотального (совокупного) временного разрезов, для каждого цуга колебаний зарегистрированного до и/или после маркерных отметок времени, считывают по единичному отсчету ЕС амплитуды фазы, последовательность единичных сигналов ЕС из m цугов колебаний накапливают в виде функционала Km. Для каждого из углов засветки от n пунктов возбуждений массивы Km из m единичных отсчетов последовательно размещают в n субблоках суммофаз (СФ), в необходимых случаях вносят поправки на угол засветки, определяют область мьютинга, удаляют зашумленные эйконалы. Производят накопления СФ с кратностью mn в виде функционала Kmn.
В соответствии с интерактивным режимом интерпретации единичных ЕС в виде накоплений Km из m фаз вдоль годографа отдельной сейсмограммы и суммофаз Kmn из годографов n сейсмограмм осуществляют (при необходимости) коррекцию заданных диапазонов V, υ и α, q следующим образом. Для каждой из υ скоростей и каждого из q ракурсов строят для каждой ОТ двумерную матрицу из элементов Km и/или Kmn, по столбцам матрицы документируют значения функционалов в зависимости от угла падения в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят отображение графика из матрицы Km(α, V) и/или Kmn(α, V), на котором визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов; график представляют в виде окна обзора достоверности и обеспечивают контроль интерпретатора за процессом опознания заданного типа волны и построением сейсмического глубинного разреза.
После этого в соответствии с процедурами, необходимыми для построения дополнительного (вспомогательного) глубинного разреза, из цуга колебаний, зарегистрированного до и/или после маркерных отметок времени, считывают из каждой m-й сейсмотрассы по ρ компонентов (обычно ρ≤20) и накапливают их в виде псевдосинфазных функционалов Fρ; после накопления сигналов, хранящихся в каждом из m функционалов Fρ, их накаплиают по ρm сигналов в суммоцугах (СЦ) в виде функционалов Fρm, затем их группируют по признаку равенства номера ракурса q; для каждой из q групп находят гиперсигнал ГС в виде функционала Fρmn супернакоплениями из ρmn амплитуд после введения известными способами поправок на n углов засветки и мьютинга.
Для каждой ОТ из совокупности множеств скоростей (до υ) и углов наклона (до q) строят двумерную матрицу из элементов Fρm и/или Fρmn и/или из элементов их энергий и/или , после соответствующих вычислений в зависимости от априорно заданных углов наклона α и априорно заданного множества скоростей V по столбцам матрицы документируют значения функционалов в зависимости от угла наклона в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят двумерное отображение графика для матриц Fρm и/или Fρmn и/или из значений их энергий и/или , на котором визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов наглядного отображения; график представляют в виде окна обзора достоверности (ООД) и обеспечивают контроль интерпретатора за процессом опознания сейсмических границ и построением сейсмического глубинного разреза; уровень Fρm и/или Fρmn и/или значения их энергий и/или в пределах окна обзора достоверности сравнивают с заданным порогом обнаружения, при превышении порога обнаружения каждый последующий уровень отображаемого функционала сравнивают с предыдущим, при превышении последующего уровня над предыдущим его документируют в блоке максимума функционала статистической обработки Fmax(υmax, qmax), в котором также хранят соответствующие максимальному уровню аргументы υmax, и qmax, обеспечивающие экстраполяцию текущих значений пластовой скорости и угла падения границ между толщами горных пород и необходимые для следующих процедур построения динамических глубинного и тотального временного разрезов.
После сигнала совпадения, который вырабатывается из схемы разрешения при условии смены в блоке Fmax предыдущего значения максимума на последующий более высокий (при монотонном возрастании скорости с глубиной), а также при экстраполяции значения Fmax для предыдущей ОТ на последующую (при постоянстве пластовой скорости), функционал Kmn или Km заносят в буферный блок суммирования. Накопления из буферного блока суммирования единичных отсчетов амплитуд Km или Kmn засылают в блок рассылки. Из блока рассылки накопления засылают в регистры блока масштабирования, где с учетом шкалы нормировки вырабатывают способ изображения ОТ на динамическом глубинном разрезе K(хОТ, hOT) и способ изображения точки тотальной амплитуды фазы Т(хОТ, hOT) на тотальном временном разрезе T(x, t), которую и засылают на суммотрассу временного разреза. Абсциссу хОТ точки тотальной амплитуды фазы задают в соответствии с абсциссой ОТ на глубинном разрезе, а ординату tOT находят в соответствии с найденной наиболее вероятной величиной скорости VOT из условия обеспечения минимального времени хода восстающего луча из отображаемой точки с коорднатами (x0, h0) до ближайшего, расположенного на профиле наблюдений, регистрирующего сейсмоприемника СП (х0, 0). Обычно при определенных допущениях tOT=h0/VOT. В соответствии с направлением развертки изображают отображаемую точку на дополнительном глубинном разрезе с интенсивностью, пропорциональной величине максимального функционала Fmax заданного типа волны в пределах окна обзора достоверности. Затем выполняют документирование последующих ОТ дополнительного (предварительного) глубинного разреза A(x, h), присваивают Fmax положение F(υ/2, q/2) в центре матрицы окна обзора достоверности и определяют скорректированные значения углов наклона и скоростей по смещению Fmax относительно центра окна обзора достоверности, для чего сравнивают аргументы υ/2 и q/2 с υmax и qmax; величину и знак скорректированных значений для V0 и α0 определяют по разностям:

где индексами i и (i-1) обозначены последующие и предыдущие априорные и текущие начальные значения диапазона изменения скорости и угла падения в отображаемой точке; последовательно в блоке Fmax(υmax, qmax) заменяют в автоматическом режиме предыдущие значения диапазона (α, V) на скорректированные, тем самым размещают F(q(i-1), υ(i-1)) в центр новой скорректированной сетки значений матрицы окна обзора достоверности. При монотонном возрастании скорости с глубиной знак приращения скорости δV должен совпадать со знаком приращения глубины (знаком развертки ОТ по столбцам). С учетом этого условия для всех q×υ углов падения и скоростей присваивают скорректированные значения F(qi, υi), среди них в пределах следующего окна обзора достоверности находят новое текущее значение Fmax, документируют очередные отображаемые точки на динамическом глубинном, тотальном временном и дополнительном глубинном разрезах с интенсивностью, соответствующей величине K(хОТ, hOT), Т(хОТ, hOT) и Fmax соответственно, размещают Fmax вновь в центр очередной скорректированной сетки окна обзора достоверности и так далее до полного построения глубинного сейсмического разреза в соответствии с заданным режимом развертки отображаемых точек по строкам и/или столбцам.
Для дальнейшего увеличения степени достоверности построения динамического глубинного и/или тотального временного разреза из последовательности единичных отсчетов ЕС в блоке рассылки выделяют и засылают в отдельные регистры блока масштабирования промежуточные и полные суммы единичных отсчетов фазы сейсмических сигналов, тем самым обеспечивают возможность составления систем линейно независимых уравнений относительно неизвестной амплитуды сигнала и среднестатистической амплитуды случайной помехи, экстраполируют линейно независимые уравнения для каждой из промежуточных сумм также и на выражения для полной суммы на основе предположения о равенстве математического ожидания случайных помех для полной и частичной последовательности единичных отсчетов, решают уравнения относительно амплитуды линейно возрастающего пропорционально числу слагаемых сигнала и возрастающей в соответствии с корнем квадратным из числа слагаемых среднестатистической амплитуды случайной помехи, документируют на ОТ динамического глубинного разреза и суммотрассах тотального временного разреза найденную высокодостоверную амплитуду свободного от случайной помехи сигнала, используют найденную высокодостоверную амплитуду свободного от помехи сигнала для оценки помехозащищенности во взаимных точках и документирования тотального временного разреза.
Статистический анализ последовательностей единичных отсчетов фазы сейсмических сигналов с точки зрения теории обнаружения полезных сигналов на фоне помех допускает выделение сигнала и помехи, так как все m отсчетов амплитуды фазы сейсмического сигнала в пределах каждого из n годографов принадлежат к полезным сигналам, интенсивность которых при суммировании линейно возрастает в зависимости от числа слагаемых mn (если этот годограф зарегистрирован при проведении сейсморазведки). Сигнал случайной помехи при суммировании, как известно, возрастает пропорционально корню квадратному из числа слагаемых. [Каценбоген М.С. Характеристики обнаружения. - М.: Советское Радио. 1965], /4/:

где а энергия полезного сигнала, а е - энергия случайных шумов и помех. Таким образом, при больших mn величина второго слагаемого e√(mn) сравнительно мало меняется в зависимости от mn. Исходя из этого разделяют полную сумму последовательности единичных отсчетов Σ(Amn) на части, например начальную Σ(Amn/r) и конечную {Σ(Amn)-Σ(Amn/r)}.
Величины сигнала и случайной помехи по предложенному способу находят из предположения равной вероятности возникновения помехи как на переднем отрезке от 1 до mn/r, так и на заднем отрезке от mn/r до mn, где r - делитель mn, решая следующую систему уравнений с двумя неизвестными а и е:

Вычисления неизвестных а и е таким образом получают экстраполяцией начальной промежуточной информации в виде Σ(Amn/r), на полный интервал Σ(Amn). Этого часто не достаточно для достоверного определения тотальной амплитуды ТА на временном разрезе, так как на сейсмограммах, кроме заданных регулярных отраженных волн, всегда присутствуют регулярные помехи, например, в виде годографов кратных, дифрагированных, рассеянных и иных типов волн. Поэтому в предлагаемом способе используют дополнительный подход в виде обратной экстраполяции конечного интервала отсчетов от (mn-mn/r) до mn на полный (в том числе и на начальный от 1 до mn/r) и дополнительно решают систему следующих уравнений:

После вычисления неизвестных сравнивают их между собой и получают информацию об уровне помех отдельно на падающих и восстающих лучах, в первую очередь во взаимных точках, при удовлетворительном результате сравнения ТА документируют на тотальном временном разрезе, а если нет, то находят среднеарифметическую величину ТА на временном разрезе:

после чего сравнивают полученный результат со среднеарифметическим Σ(Amn)/mn и получают информацию о наличии регулярной помехи на протяжении всего эйконала волны заданного типа. Результаты, полученные при определении величин а и  также можно представить в виде матриц a(α, V) и
также можно представить в виде матриц a(α, V) и  и выявлять области распределения случайных и регулярных волн-помех сложением, вычитанием, умножением элементов этих матриц.
и выявлять области распределения случайных и регулярных волн-помех сложением, вычитанием, умножением элементов этих матриц.
Способ осуществляется следующим образом.
Построение изображений сложно построенных сред в виде динамического глубинного K(x, h) и/или тотального (совокупного) временного разреза T(x, t) осуществляется трансформацией результатов обзора волновых полей на сейсмограммах An(x, t) на основе использования в процессе построения дополнительных предварительных версий глубинного разреза A(x, h). Сущность способа состоит в том, что сначала для каждой отображаемой точки OT(x0, h0) предварительного глубинного разреза A(x, h) осуществляют обзор волнового поля A(x, t) на n сейсмограммах, зарегистрированных по способу многократных перекрытий в результате засветки под различными углами отображаемых точек (ОТ) из n пунктов воздействий. Обзор производят, решая прямую задачу методом лучевого трассирования. Предполагают наличие сейсмической границы в отображаемой точке, из которой возможно исходят вторичные сейсмические волны в соответствии с предварительно заданным множеством скоростей V=V0±ΔV (1, 2, …, υ/2, …, υ), (где V0 - априорно заданное первоначальное значение скорости из заданного массива скоростей V(x, h), x, h - координаты глубинного разреза, ΔV - шаг приращения скорости, υ - число шаговых приращений скорости), а также предварительно установленной определенной конфигурации сейсмического объекта, который задан в отображаемой точке q ракурсами с определенным шагом поворота Δα угла падения α с центром вращения в отображаемой точке, для каждого ракурса объекта задают множество углов падения α=±α0±Δα (1, 2, …, q/2, …, q), (где α0 - априорно заданное первоначальное значение угла падения границы в отображаемой точке, Δα - шаг приращения угла падения, q - число пошаговых приращений угла падения), задают координаты отображаемой точки, n пунктов воздействий, m сейсмоприемников (СП) и закон (функцию) расположения последовательности из m точек, прилегающих к отображаемой точке. Для каждого заданного типа волны строят qυmn виртуальных годографов, чем обеспечивают возможность направленного псевдосинфазного накопления отсчетов амплитуд вдоль полученных маркерных отметок времени на годографах.
Затем в соответствии с процедурами, необходимыми для построения динамических глубинного K(x, h) и тотального (совокупного) временного T(x, t) разрезов, для каждого цуга колебаний считывают по единичному отсчету амплитуды фазы, последовательность единичных сигналов (ЕС) из m цугов колебаний накапливают в виде функционала Km. Для каждого из углов засветки от n пунктов возбуждений массивы Km из m единичных отсчетов последовательно размещают в n субблоках суммофаз (СФ), в необходимых случаях вносят поправки на угол засветки, определяют область мьютинга, удаляют зашумленные эйконалы. Производят накопления СФ с кратностью mn в виде функционала Kmn.
В соответствии с интерактивным режимом интерпретации единичных ЕС в виде накоплений Km из m фаз вдоль годографа отдельной сейсмограммы и суммофаз Kmn из годографов n сейсмограмм осуществляют (при необходимости) коррекцию заданных диапазонов V, υ и α, q следующим образом. Для каждой из v скоростей и каждого из q ракурсов строят для каждой ОТ двумерную матрицу из элементов Km и/или Kmn, по столбцам матрицы документируют значения функционалов в зависимости от угла падения в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят отображение графика из матрицы Km(α, V) и/или Kmn(α, V), на которой визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов; график представляют в виде окна обзора достоверности (ООД) и обеспечивают контроль интерпретатора за процессом опознания заданного типа волны и построением сейсмических динамических глубинного K(x, h) и тотального временного T(x, t) разрезов.
После этого в соответствии с процедурами, необходимыми для построения дополнительного (вспомогательного) глубинного разреза A(x, h), из цуга колебаний, зарегистрированного до и/или после маркерных отметок времени, считывают из каждой m-й сейсмотрассы по ρ компонентов (обычно ρ≤20) и накапливают их в виде псевдосинфазных функционалов Fρ; после накопления сигналов, хранящихся в каждом из m функционалов Fρ, их накаплиают по ρm сигналов в суммоцугах (СЦ) в виде функционалов Fρm, затем их группируют по признаку равенства номера ракурса q; для каждой из q групп находят гиперсигнал ГС в виде функционала Fρmn супернакоплениями из ρmn амплитуд после введения известными способами поправок на n углов засветки и мьютинга.
Для каждой ОТ из совокупности множеств скоростей (до υ) и углов наклона (до q) строят двумерную матрицу из элементов Fρm и/или Fρmn и/или из элементов их энергий и/или , после соответствующих вычислений в зависимости от априорно заданных углов наклона α и априорно заданного множества скоростей V по столбцам матрицы документируют значения функционалов в зависимости от угла наклона в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят двумерное отображение графика для матриц Fρm и/или Fρma, и/или из значений их энергий и/или , на котором визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов наглядного отображения; график представляют в виде окна обзора достоверности (ООД) и обеспечивают контроль интерпретатора за процессом опознания сейсмических границ и построением сейсмического предварительного глубинного разреза; уровень Fρm и/или Fρmn, и/или значения их энергий и/или в пределах окна обзора достоверности сравнивают с заданным порогом обнаружения, при превышении порога обнаружения каждый последующий уровень отображаемого функционала сравнивают с предыдущим, при превышении последующего уровня над предыдущим его максимальное значение Fmax документируют совместно с аргументами υmax и qmax в блоке максимума функционала статистической обработки Fmax(υmax, qmax), обеспечивают экстраполяцию текущих значений пластовой скорости и угла падения границ между толщами горных пород и выдают сигнал на схему разрешения передачи сигналов в буферный блок суммирования для построения динамических глубинного и тотального временного разрезов.
После сигнала совпадения, который вырабатывают из схемы разрешения при условии смены в блоке Fmax предыдущего значения максимума на последующий более высокий (при монотонном возрастании скорости с глубиной) или при экстраполяции значения Fmax для предыдущей ОТ на последующую (при постоянстве пластовой скорости) функционал Kmn или Km заносят в буферный блок суммирования. Накопления из буферного блока суммирования единичных отсчетов амплитуд Km или Kmn засылают в блок рассылки. Из блока рассылки накопления засылают в регистры блока масштабирования, где с учетом шкалы нормировки вырабатывают способ изображения ОТ на динамическом глубинном разрезе K(хО, hOT) и способ изображения точки тотальной амплитуды фазы T(xO, tOT) на тотальном временном разрезе T(x, t), которую и засылают на суммотрассу временного разреза. Абсциссу хО точки тотальной амплитуды фазы задают в соответствии с абсциссой ОТ на глубинном разрезе, а ординату tOT находят в соответствии с найденной наиболее вероятной величиной скорости VOT из условия обеспечения минимального времени хода восстающего луча из отображаемой точки с коорднатами (x0, h0) до ближайшего, расположенного на профиле наблюдений, регистрирующего сейсмоприемника СП (х0, 0). Обычно при определенных допущениях tOT=h0/VOT.
В соответствии с направлением развертки изображают отображаемую точку на дополнительном глубинном разрезе A(x, h) с интенсивностью, пропорциональной величине максимального функционала Fmax заданного типа волны в пределах окна обзора достоверности. Затем выполняют документирование последующих ОТ дополнительного (предварительного) глубинного разреза A(x, h), присваивают Fmax положение F(υ/2, q/2) в центре матрицы окна обзора достоверности и определяют скорректированные значения углов наклона и скоростей по смещению Fmax относительно центра окна обзора достоверности, для чего сравнивают аргументы υ/2 и q/2 с υmax и qmax; величину и знак скорректированных значений для V0 и α0 определяют по разностям:

где индексами i и (i-1) обозначены последующие и предыдущие априорные и текущие начальные значения диапазона изменения скорости и угла падения в отображаемой точке; последовательно в блоке Fmax(υmax, qmax) заменяют в автоматическом режиме предыдущие значения диапазона (α, V) на скорректированные, тем самым размещают F(q(i-1), υ(i-1)) в центр новой скорректированной сетки значений матрицы окна обзора достоверности. При монотонном возрастании скорости с глубиной знак приращения скорости δV должен совпадать со знаком приращения глубины (знаком развертки ОТ по столбцам). С учетом этого условия для всех q×υ углов падения и скоростей присваивают скорректированные значения F(qi, υi), среди них в пределах следующего окна обзора достоверности находят новое текущее значение Fmax, документируют очередные отображаемые точки на динамическом глубинном, тотальном временном и дополнительном глубинном разрезах с интенсивностью, соответствующей величине K(хОТ, hOT), Т(хОТ, tOT) и Fmax соответственно, размещают Fmax вновь в центр очередной скорректированной сетки окна обзора достоверности и так далее до полного построения дополнительного глубинного сейсмического разреза A(x, h) и динамических глубинного K(x, h) и тотального временного T(x, t) разрезов в соответствии с заданным режимом развертки отображаемых точек по строкам и/или столбцам.
Для дальнейшего увеличения степени достоверности построения динамического глубинного и/или тотального временного разреза из последовательности единичных отсчетов ЕС в блоке рассылки выделяют и засылают в отдельные регистры блока масштабирования промежуточные и полные суммы единичных отсчетов фазы сейсмических сигналов, тем самым обеспечивают возможность составления систем линейно независимых уравнений относительно неизвестной амплитуды сигнала и среднестатистической амплитуды случайной помехи, экстраполируют линейно независимые уравнения для каждой из промежуточных сумм также и на выражения для полной суммы на основе предположения о равенстве математического ожидания случайных помех для полной и частичной последовательности единичных отсчетов, решают уравнения относительно амплитуды линейно возрастающего пропорционально числу слагаемых сигнала и возрастающей в соответствии с корнем квадратным из числа слагаемых среднестатистической амплитуды случайной помехи, документируют на ОТ динамического глубинного разреза и суммотрассах тотального временного разреза найденную высокодостоверную амплитуду свободного от случайной помехи сигнала, используют найденную высокодостоверную амплитуду свободного от помехи сигнала для оценки помехозащищенности во взаимных точках и документирования тотального временного разреза.
Статистический анализ последовательностей единичных отсчетов фазы сейсмических сигналов с точки зрения теории обнаружения полезных сигналов на фоне помех допускает выделение сигнала и помехи, так как все m отсчетов амплитуды фазы сейсмического сигнала в пределах каждого из n годографов принадлежат к полезным сигналам, интенсивность которых при суммировании линейно возрастает в зависимости от числа слагаемых mn (если этот годограф зарегистрирован при проведении сейсморазведки). Сигнал случайной помехи при суммировании, как известно, возрастает пропорционально корню квадратному из числа слагаемых [Каценбоген М.С. Характеристики обнаружения. - М.: Советское Радио. 1965], /4/:
где а энергия полезного сигнала, а е - энергия случайных шумов и помех. Таким образом, при больших mn величина второго слагаемого e√(mn) сравнительно мало меняется в зависимости от mn. Исходя из этого разделяют полную сумму последовательности единичных отсчетов Σ(Amn) на части, например начальную Σ(Amn/r) и конечную {Σ(Amn)-Σ(Amn/r)}.
Величины сигнала и случайной помехи по предложенному способу находят из предположения равной вероятности возникновения помехи как на переднем отрезке от 1 до mn/r, так и на заднем отрезке от mn/r до mn, где r - делитель mn, решая следующую систему уравнений с двумя неизвестными а и е:
Вычисления неизвестных а и е таким образом получают экстраполяцией начальной промежуточной информации в виде Σ(Amn/r), на полный интервал Σ(Amn). Этого часто недостаточно для достоверного определения тотальной амплитуды ТА на временном разрезе, так как на сейсмограммах, кроме заданных регулярных отраженных волн, всегда присутствуют регулярные помехи, например в виде годографов кратных, дифрагированных, рассеянных и иных типов волн. Поэтому в предлагаемом способе используют дополнительный подход в виде обратной экстраполяции конечного интервала отсчетов от (mn-mn/r) до mn на полный (в том числе и на начальный от 1 до mn/r) и дополнительно решают систему следующих уравнений:
После вычисления неизвестных сравнивают их между собой и получают информацию об уровне помех отдельно на падающих и восстающих лучах, в первую очередь во взаимных точках, при удовлетворительном результате сравнения ТА документируют на тотальном временном разрезе, а если нет, то находят среднеарифметическую величину ТА на временном разрезе:
после чего сравнивают полученный результат со среднеарифметическим Σ(Amn)/mn и получают информацию о наличии регулярной помехи на протяжении всего эйконала волны заданного типа. Результаты, полученные при определении величин а и  также можно представить в виде матриц a(α, V) и
также можно представить в виде матриц a(α, V) и  и выявлять области распределения случайных и регулярных волн-помех сложением, вычитанием, умножением элементов этих матриц.
и выявлять области распределения случайных и регулярных волн-помех сложением, вычитанием, умножением элементов этих матриц.
Пути реализации патентуемого способа по п.1 приводятся в нижеследующем описании примера 1.
Пример 1. Блок-схема реализации способа построения изображений сложно построенных сред в виде динамического глубинного K(x, h) и/или тотального (совокупного) временного разреза T(x, t) трансформацией из промежуточного глубинного разреза A(x, h).
Описание поясняется Фиг.1 и Фиг.2, где
на Фиг.1:
X - координатная ось вдоль профиля регистрации;
ПВ1, ПВ2, ПВ3, …, ПВn - пункты возбуждения сейсмических сигналов;
ОТ(х0, h0) - отображаемая точка под n углами засветки из ПВ1, ПВ2, ПВ3, …, ПВn;
1 - последовательность отрезков прямолинейной зеркальной границы под углами падения, α0, α0+Δα, α0+2Δα, …, α0+qΔα;
t - координатная ось времени регистрации сейсмических сигналов на сейсмограмме;
2 - блок генерации mnqυ виртуальных годографов волны заданного типа по известным координатам ОТ, ПВ, СП, заданным перечнем углов наклона α и скоростей V;
СП1, СП2, …, СПm - сейсмоприемники на профиле регистрации сейсмограммы;
3 - отображение одного из mnqυ виртуальных годографов, полученного из блока генерации 2;
tµ - маркерные виртуальные отметки времени выемки отсчета амплитуды фазы сейсмического сигнала на сейсмотрассе, соответствующие времени хода лучей вдоль эйконала (падающего из ПВ до ОТ и восстающего от ОТ до СП луча);
4 - субблоки хранения единичных отсчетов фаз Km по m отсчетов из каждой из n сейсмограмм, принадлежащих текущим углу падения и скорости;
5 - блок хранения суммофаз (СФ) в виде функционалов Kmn, полученных в результате накопления из n сейсмограмм, зарегистрированных от n ПВ, рассчитанных для текущих значений угла падения (из q) и скорости (из υ);
6 - блоки накоплений отдельных цугов колебаний Fρ (по ρ отсчетов до и/или после маркерных отметок времени);
7 - блок суммоцуга (СЦ), полученного в результате суммарного псевдосинфазного накопления Fρm по ρm амплитуд вдоль каждого из m виртуального годографа 3 для текущих значений n, q и υ;
8 - блок хранения до n отдельных СЦ из текущих накоплений отсчетов сигналов вторичных волн, полученных из n зарегистрированных от n ПВ сейсмограмм;
9 - массивы накоплений Fρm суммоцугов по ρm амплитуд, соответствующих каждому из n углов засветки сейсмической радиацией от n ПВ;
10 - массив текущих гиперсигналов Fρmn, полученных после группирования одного из q отдельных отрезков 1 при засветке от n ПВ; состоящих из ρmn супернакоплений амплитуд всех n суммоцугов, хранящихся в блоке 8 и зарегистрированных от n сейсмограмм;
11 - блок вычисления значения функционала статистической обработки (ФСО), например типа энергии супернакоплений FW(α, V) для текущих значений углов падения отрезков q и скорости υ;
12 - блок нормировки и масштабирования;
13 - окно обзора достоверности (ОДО) знакопеременных Km(α, V) в виде гистограммы;
14 - окно обзора достоверности знакопеременных Kmn(α, V) в виде изолиний;
15 - окно обзора достоверности Fρm(α, V) в виде изолиний;
16 - окно обзора достоверности энергии гиперсигналов Fρmn(α, V) в виде гистограммы;
17 - блок сравнения текущего значения ФСО с пороговым уровнем шумов;
18 - блок сравнения текущего значения Fρmn(α, V) с предыдущим максимальным значением и засылки большего из них в блок 19;
19 - блок хранения максимального значения ФСО Fmax и соответствующего этому значению угла падения и величины скорости;
20 - изображение предварительных версий сейсмического глубинного разреза A(x, h);
21 - блок формирования изображений сложно построенных сред в виде динамического глубинного K(x, h) и/или тотального (совокупного) временного разреза T(x, t) трансформацией из A(x, h) предварительной вспомогательной версии глубинного разреза 20.
На Фиг.2 приведен отдельно блок 21 где
4 - то же, что и на Фиг.1;
5 - то же, что и на Фиг.1;
19 - то же, что и на Фиг.1;
21 - то же, что и на Фиг.1;
22 - схема разрешения пересылки функционала Kmn из блока 5 или любого Km из субблоков 4 в буферный блок;
23 - буферный блок хранения и обработки последовательностей амплитуд;
24 - блок рассылки накоплений;
25, 30 - приемные регистры блока масштабирования;
26 - блок нормировки, выбора динамического диапазона и масштаба отображений;
27 - блок отображения динамического глубинного разреза K(x, h);
28 - блок вычисления времени хода восстающего луча из ОТ до СП;
29 - блок отображения динамического тотального временного разреза T(x, h);
Построение сейсмического разреза в соответствии с заявляемым способом осуществляется, например, следующим образом.
На фиг.1 показана ОТ под n углами засветки из ПВ1, ПВ2, …, ПВn и СП1, СП2, СП3, …, СПm, расположенных на профиле регистрации и изображенных на координатной оси X. На зеркальных прямолинейных отрезках 1 сейсмической границы под углами падения α0, α0+Δα, α0+2Δα, …, α0+Δα×q предположительно находятся m точек, прилегающих к данной ОТ и являющиеся источниками зарегистрированных m СП вторичных волн.
Вероятность обнаружения точек зеркального отражения вдоль заданных границ обеспечивают обзором волнового поля каждой из n сейсмограмм, зарегистрированных в результате воздействий из ПВ1, ПВ2, …, ПВn. Обзор реализуют серией решений квазипрямой задачи сейсморазведки по способу лучевого трассирования. Из блока 2 осуществляют генерацию qvmn виртуальных годографов 3 с использованием координат ОТ, ПВ, СП, заданных величин шага и количества (m) прилегающих к ОТ точек, текущих величин углов падения α в ОТ отрезков (до q) предполагаемых сейсмических границ и заданных (до υ) скоростей. V.
В зависимости от характера распространения падающих и восстающих лучей из блока 2 сначала с учетом величины скорости V0 и угла падения α0 определяют длины m эйконалов, находят по m маркерных отметок времени tµ прихода лучей на первой сейсмограмме, зарегистрированной от ПВ1, производят накопление Km по одной амплитуде отсчетов фазы, соответствующей tµ, и засылают их в один из субблоков 4 хранения единичных сигналов (ЕС) и при необходимости в качестве первого элемента матрицы Km(α0, V0) системы интерактивной интерпретации отдельной сейсмограммы, в пределах блока СФ их размещают в один из n субблоков 4 для хранения по отдельности каждой из m последовательностей ЕС единичных амплитуд в виде соответствующих номеру ПВ массивов Km, считанных из n сейсмограмм, зарегистрированных от ПВ1, ПВ2, …, ПВn, при необходимости размещают его в качестве одного из элементов матрицы Km(α0, V0) системы интерактивной интерпретации ЕС и после нормировки и масштабирования отображают в ООД. Производят текущее накопление n массивов Km в блоке 5 накопления суммофаз Kmn, при необходимости размещают его в качестве одного из элементов матрицы Kmn(α0, V0) системы интерактивной интерпретации СФ и после нормировки и масштабирования отображают в ООД.
Для каждого из q текущих углов падения и каждой из υ текущих значений скорости до и/или после маркерных отметок времени накапливают ρ отсчетов амплитуд цуга колебаний в массивах Fρ, исходящих из отрезков 1, и последовательно размещают их в m блоках цугов колебаний 6. Производят псевдосинфазные первичные накопления в массиве Fρm кратностью ρm, который размещают в блоке суммоцуга 7, засылают его в блок 8, размещают в одном из массивов 9, соответствующем ПВ1, при необходимости, размещают в качестве одного из элементов матрицы Fρm(α0, V0) системы интерактивной интерпретации СЦ отдельной сейсмограммы и после нормировки и масштабирования отображают в ООД. Производят текущее накопление n ФСО Fρm из блока 8 и размещают результат супернакопления текущих гиперсигналов в ФСО Fρmn блока 10 СФ, при необходимости размещают в качестве одного из элементов матрицы Fρmn(α, V0) системы интерактивной интерпретации гиперсигналов и после нормировки и масштабирования отображают в ООД. В блоке 11 определяют для ФСО Fm и/или Fmn или Fρm и/или Fρmn величину их энергии и при необходимости размещают в качестве одного из элементов матрицы  и/или
и/или  , или и/или системы интерактивной интерпретации энергии ФСО.
, или и/или системы интерактивной интерпретации энергии ФСО.
В блоке 12 производят нормировку и масштабирование, например FW(α0, V0), после чего, если возникает необходимость в визуальном контроле, засылают FW(α0, V0) в качестве первого элемента (одной из заданных или нескольких матриц 13, 14,) матрицы отображают в ООД 15 и/или 16. Сравнивают величину FW(α0, V0) в блоке 17 с пороговым значением уровня шумов.
Если уровень FW(α0, V0) превышает порог, то он засылается в блок 18, в котором сравнивают текущее значение FW(α0, V0) с предыдущим максимальным значением ФСО, хранящемся в блоке 19 хранения максимального значения Fmax, который обеспечивает экстраполяцию текущих значений пластовой скорости и угла падения границ для однородных толщ горных пород при построении последующих ОТ в соответствии с направлением развертки. При монотонном возрастании скорости с глубиной знак приращения скорости δV должен совпадать со знаком приращения глубины (знаком развертки по столбцам). Если уровень FW(α0, V0) менее порогового значения, то на изображении ОТ на предварительном глубинном разрезе 20 регистрируют нулевую интенсивность. Если текущее значение ФСО в блоке 18 превышает предыдущее, хранящееся в блоке 19, то содержимое блока 19 заменяют на большее значение FW(α0, V0) и засылают большее из них в блок 19. В блок 19 засылают при этих логических условиях также найденную величину наиболее вероятного угла падения α0i и скорости V0i. Затем на сейсмограмме, зарегистрированной от ПВ2, также вдоль соответствующего годографа подобным же образом заполняют n раз другие массивы данных в блоках 4÷10, при необходимости их размещают в качестве другого элемента в матрицах и отображают в соответствующих заданных окнах обзора достоверности.
После этого в рамках системы интерактивной интерпретации выполняют такие же накопления Km(α0+Δα, V0), Kmn(α0+Δα, V0), Fm(α0+Δα, V0), Fmn(α0+Δα, V0), Fρm(α0+Δα, V0) и Fρmn(α0+Δα, V0) в блоках 4÷10 для следующего текущего угла падения и так далее n раз. В блоке 11 снова определяют величину энергии вышеперечисленных ФСО и при необходимости размещают в качестве другого элемента матрицы системы интерактивной интерпретации энергии ФСО.
Аналогичным образом приступают к генерации следующей серии из mn виртуальных годографов, выборке данных из n сейсмограмм, засылке и обработке их в блоках 4÷19 для каждого из остальных углов падения отрезков 1, задавая α=α0+2Δα и так далее до α=α0+qΔα, при котором полностью заполняют первые строки матриц ООД.
Приступают к генерации виртуальных годографов при следующем значении скорости V=V0±ΔV и аналогично заполняют вторую строку матрицы ООД и так далее до заполнения последней строки матрицы ООД при V=V0+υΔV и α=α0+qΔα.
При необходимости осуществляют интерактивный режим интерпретации и коррекцию заданных диапазонов V, υ и α, q построением окон обзора достоверности (ООД) на основе визуализации матриц Fm(α, V), и/или Fmn(α, V), и/или Fρm(α, V), и/или Fρmn(α, V) в виде изолиний, гистограмм или иных способов. При ρ=1 визуализацию матрицы ООД производят как с использованием блока 11 вычисления значения энергии  и
и  так и минуя его и засылая Fm(α, V), Fmn(α, V) сразу в блок нормировки и масштабирования 12 и далее в ООД и блоки 17÷19. Аналогично строят (тотальный временной) разрез, минуя блок 11 и используя накопления Fρm(α, V) и Fρmn(α, V).
так и минуя его и засылая Fm(α, V), Fmn(α, V) сразу в блок нормировки и масштабирования 12 и далее в ООД и блоки 17÷19. Аналогично строят (тотальный временной) разрез, минуя блок 11 и используя накопления Fρm(α, V) и Fρmn(α, V).
На изображении A(x, h) предварительного глубинного разреза 20 регистрируют (при необходимости визуального контроля) величины максимума ФСО и наиболее вероятного угла падения α0i отрезка в ОТ, а в блок 21 через схему разрешения 22 (см. Фиг.2) в буферный блок хранения и обработки 23 засылают результаты накоплений, хранящиеся в блоках 4 или 5, и величину наиболее вероятной скорости V0i. Вход в буферный блок хранения 23 открывается, таким образом, при соблюдении следующих условий:
1 - при наличии знака δV, соответствующего знаку развертки ОТ по столбцам (при монотонном возрастании/убывании скорости);
2 - при наличии в пределах сейсмогеологической модели слоев, характеризующихся постоянством пластовой скорости, в результате чего значения максимума функционала статистической обработки и его аргументов α0i и V0i в пределах пласта не меняются.
Накопления из блоков 4 или 5 через блок рассылки 24 поступают в приемный регистр 25 блока масштабирования 26. Регистрируют на динамическом глубинном разрезе 27 точку K(хО, hOT), а в блоке 28 время tOT находят в соответствии с найденной наиболее вероятной величиной скорости VOT из условия обеспечения минимального времени хода восстающего луча из отображаемой точки ОТ с коорднатами (x0, h0) до ближайшего, расположенного на профиле наблюдений, регистрирующего сейсмоприемника (обычно при определенных предположениях tOT=h0/VOT). Задают диапазон и способ отображения точек на динамическом тотальном временном разрезе 29 и в соответствии с найденным временем tOT регистрируют на суммотрассе Т(хОТ, 0) тотального временного разреза 29 точку тотальной амплитуды фазы Т(хОТ, tOT).
Переходят к документированию последующих ОТ на динамическом глубинном K(x, h) и/или тотальном временном T(x, t) разрезах в соответствии с заданным режимом развертки ОТ по строкам и/или столбцам предварительного глубинного разреза. Для каждой последующей ОТ определяют скорректированные значения углов падения и скоростей путем задания нового центра окна обзора достоверности с одним из заданных накоплений F(υ/2, q/2) или F(υ/2, q/2), или FW(υ/2, q/2) и сравнения его аргументов υ/2 и q/2 с аргументами предыдущего υmax и qmax; величину и знак скорректированных значений для V0 и α0 определяют по разностям:

где индексами i и (i-1) обозначены последующие и предыдущие априорные и текущие начальные значения диапазона изменения скорости и угла наклона в ОТ; последовательно заменяют в автоматическом режиме предыдущие значения диапазона (α, V) на скорректированные, тем самым размещают Fmax(q(i-1), υ(i-1)) в центр новой скорректированной сетки значений матрицы ООД. При монотонном возрастании скорости с глубиной знак приращения скорости δV должен совпадать со знаком приращения глубины (знаком развертки ОТ по столбцам). С учетом этого условия снова для всех q×υ находят скорректированные значения F(qi, υi), среди них в пределах ООД находят текущее значение Fmax, документируют очередные точки глубинных и тотального временного разреза в соответствии с вышеописанной последовательностью действий, размещают Fmax вновь в центр очередной скорректированной сетки ООД и так далее.
Подобным способом обзора волнового поля с заданным шагом приращения координат и трансформации предварительного промежуточного глубинного разреза A(x, h) наносят все остальные соседние точки K(хО, hOT) и T(xOT, tOT) на динамический глубинный K(х, h) и тотальный временной разрезы T(x, t).
Пути реализации патентуемого способа по п.2 приводятся в нижеследующем описании примера 2.
Пример 2. Блок-схема реализации способа построения динамического глубинного и/или тотального временного разреза методом обратной трансформации относительно предварительного глубинного сейсмического разреза 20.
Описание поясняется Фиг.1 и Фиг.2, где обозначения элементов блок-схемы такие же, как и для способа по п.1, и предусматривают:
30 - приемный регистр хранения промежуточных отсчетов Km или Kmn.
Для дальнейшего увеличения степени достоверности построения тотального временного разреза из последовательности единичных отсчетов в блоке рассылки 24 выделяют и засылают в отдельные регистры 30 блока масштабирования 26 промежуточные и полные суммы единичных отсчетов фазы сейсмических сигналов, тем самым обеспечивают возможность составления систем линейно независимых уравнений относительно неизвестной амплитуды сигнала и среднестатистической амплитуды помехи, например при r=2:

После решения этой системы присваивают амплитуде сигнала в ТА величину а из (5) и изображают ее на более достоверном тотальном временном разрезе. Исследуют подобным образом степень постоянства сейсмогеологической среды, для чего составляют и решают уравнения обратной эстраполяции:

Если  из (6) существенно отличается от а из (5), то это свидетельствует о том, что на пути лучей от ПВ с номерами 1, 2, …, n/2 находится среда, отличающаяся от той, которую пересекают лучи от ПВ с номерами n/2+1, n/2+2, …, n, или же что годографы заданного типа волны, в первую очередь во взаимных точках на определенном участке, существенно совпадают на нескольких сейсмограммах с годографами волны-помехи. Также анализируют полученные результаты с обычно применяемым на практике среднеарифметическим значением а′=Σ(Amn)/mn. Результаты, полученные при определении величин а и
из (6) существенно отличается от а из (5), то это свидетельствует о том, что на пути лучей от ПВ с номерами 1, 2, …, n/2 находится среда, отличающаяся от той, которую пересекают лучи от ПВ с номерами n/2+1, n/2+2, …, n, или же что годографы заданного типа волны, в первую очередь во взаимных точках на определенном участке, существенно совпадают на нескольких сейсмограммах с годографами волны-помехи. Также анализируют полученные результаты с обычно применяемым на практике среднеарифметическим значением а′=Σ(Amn)/mn. Результаты, полученные при определении величин а и  также можно визуализировать после заполнения матриц a(α, V) и и выявлять области распределения случайных и регулярных волн-помех сложением, вычитанием, умножением элементов этих матриц.
также можно визуализировать после заполнения матриц a(α, V) и и выявлять области распределения случайных и регулярных волн-помех сложением, вычитанием, умножением элементов этих матриц.
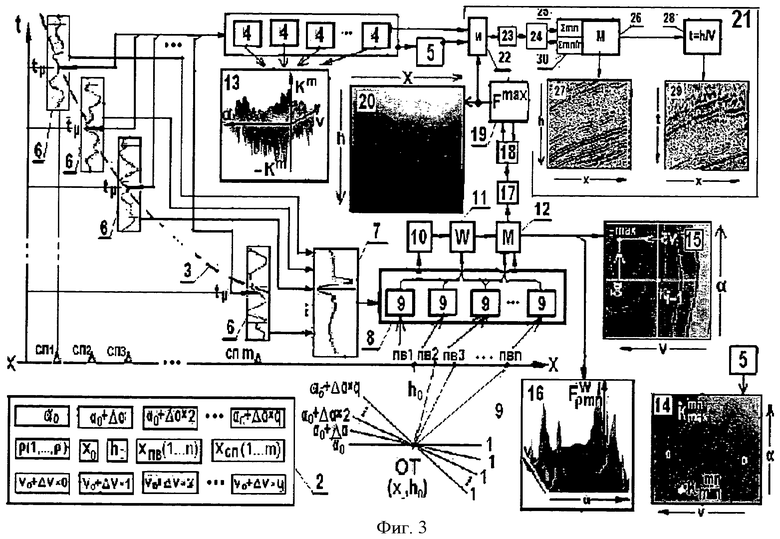
На фиг.3 приведена сводная блок-схема построения глубинного и временного динамических сейсмических разрезов.
Источники информации
1. Сейсморазведка. Справочник геофизика. - М.: Недра. 1981.
2. Бондарев В.И. Сейсморазведка (учебник). Екатеринбург, 2007, с.467-482.
3. Патент РФ №2415449 от 27.03.2011.
4. Каценбоген М.С. Характеристики обнаружения. - М.: Советское Радио, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2011 |
|
RU2463628C1 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2010 |
|
RU2449322C1 |
| СПОСОБ ПОЛУЧЕНИЯ АПРИОРНОГО ГОДОГРАФА ДЛЯ ВЫПОЛНЕНИЯ ЛИТОЛОГО-СТРАТИГРАФИЧЕСКОЙ ПРИВЯЗКИ | 2013 |
|
RU2541091C1 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО И/ИЛИ ВРЕМЕННОГО РАЗРЕЗА "КОНГ-МАКРО" (ВАРИАНТЫ) | 2010 |
|
RU2445651C2 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2009 |
|
RU2415449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛЕГАНИЯ ЗОНЫ МИКРОСЕЙСМИЧЕСКОЙ ЭМИССИИ И МЕСТОПОЛОЖЕНИЯ ЕЁ ПРОЕКЦИИ НА ПОВЕРХНОСТЬ | 2014 |
|
RU2573169C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ И ПАРАМЕТРОВ МЕХАНИЗМОВ ИХ ОЧАГОВ В УСЛОВИЯХ СИЛЬНЫХ СЕЙСМИЧЕСКИХ ПОМЕХ (ВАРИАНТЫ) | 2012 |
|
RU2494418C1 |
| УСТОЙЧИВЫЙ МЕТОД ПОСТРОЕНИЯ ГЛУБИННЫХ ИЗОБРАЖЕНИЙ В СЕЙСМОРАЗВЕДКЕ НА ОСНОВАНИИ НАСТРОЙКИ ОПЕРАТОРА ПО ЭТАЛОННЫМ СЕЙСМОГРАММАМ | 2014 |
|
RU2577792C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УПРУГИХ СВОЙСТВ ГОРНЫХ ПОРОД НА ОСНОВЕ ПЛАСТОВОЙ АДАПТИВНОЙ ИНВЕРСИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2012 |
|
RU2526794C2 |
| Способ определения углов наклона отражающих границ по данным МОГТ 2D | 2020 |
|
RU2747628C1 |


Изобретение относится к сейсмической разведке и может быть использовано для построения изображений сложно построенных сред в виде динамического глубинного K(х, h) и/или тотального (совокупного) временного разреза Т(х, t). Заявленный способ включает обзор волнового поля An(x, t) лучевым трассированием виртуальных годографов на n сейсмограммах, зарегистрированных m сейсмоприемниками (СП) способом многократного профилирования. Обзор производят псевдосинфазным накоплением вдоль виртуальных годографов m единичных сигналов и по ρ сигналов в каждом цуге колебаний Fρm, зарегистрированных СП от q ракурсов сейсмических границ. Строят окна обзора достоверности на основе визуализации матриц функционалов Km(α, V) и/или Kmn(α, V), Fρm(α, V) и/или Fρmn(α, V), и/или их энергии FW(α, V) в виде изолиний, гистограмм или иных способов. Находят максимум функционала статистической обработки Fmax(α, V), документируют ОТ и наиболее вероятный угол падения границы на предварительном глубинном разрезе А(х, h). Документируют все остальные соседние точки динамического глубинного K(х, h) и тотального временного разреза Т(х, t) с заданным шагом приращения координат. Технический результат - повышение точности получаемых результатов. 1 з.п. ф-лы, 3 ил.
1. Способ построения сейсмических динамических глубинного K(х, h), и/или тотального временного Т(х, t) разрезов, включающий развертку отображаемых точек ОТ(х0, h0) предварительного глубинного разреза А(х, h) по столбцам (h) и/или строкам (х), из каждой отображаемой точки в пределах предварительного (вспомогательного) глубинного разреза А(х, h) производят обзор волнового поля, решая псевдопрямую задачу методом лучевого трассирования и используя данные о глубинном строении недр из сейсмограмм An(x, t), полученных методом многократного профилирования, обеспечивающих засветку под различными углами отображаемых точек из n пунктов воздействий, предполагая наличие сейсмической границы в отображаемой точке, из которой возможно исходят вторичные сейсмические волны в соответствии с предварительно заданным множеством скоростей V=V0±ΔV(1, 2, …, υ/2, …, υ), (где V0 - априорно заданное первоначальное значение скорости из заданного массива скоростей V(x, h), х, h - координаты глубинного разреза, ΔV шаг приращения скорости, υ - число шаговых приращений скорости), а также в соответствии с предварительно установленной определенной конфигурацией сейсмического объекта, который задан в отображаемой точке q ракурсами угла падения α с центром вращения в отображаемой точке, для каждого ракурса объекта задают множество углов падения α=±α0±Δα(1, 2, …, q/2, …, q), (где α0 - априорно заданное первоначальное значение угла падения границы в отображаемой точке, Δα - шаг приращения угла падения, q - число пошаговых приращений угла падения); задают координаты как отображаемой точки, так и n пунктов воздействий, m сейсмоприемников и закон (функцию) расположения последовательности из m точек, прилегающих к отображаемой точке; обеспечивают возможность направленного псевдосинфазного накопления отсчетов амплитуд вдоль полученных маркерных отметок времени на годографах для каждого заданного типа волны путем построения qυmn виртуальных годографов; затем в соответствии с процедурами, необходимыми для построения динамических глубинного K(х, h) и тотального (совокупного) временного Т(х, t) разрезов, из каждой из n сейсмограмм для каждого из m цуга колебаний в соответствии с маркерными отметками времени на сейсмотрассах считывают по единичному отсчету амплитуды фазы, последовательность единичных сигналов из m цугов колебаний накапливают в виде функционала Km; для каждого из углов засветки от n пунктов возбуждений массивы Km из m единичных отсчетов последовательно размещают в n субблоках суммофаз, в необходимых случаях вносят поправки на угол засветки, определяют область мьютинга, удаляют зашумленные эйконалы и производят накопления в блоках суммофаз с кратностью mn в виде функционала Kmn; для интерактивного режима интерпретации совокупность единичных накоплений Km из m фаз вдоль годографа отдельной сейсмограммы и суммофаз Kmn из годографов n сейсмограмм (при необходимости) коррекцию заданных диапазонов V, υ и α, q осуществляют построением для каждой отображаемой точки двумерной матрицы в виде сетки из элементов Km и/или Kmn, по столбцам матрицы документируют значения функционалов в зависимости от угла падения α в отображаемой точке, а по строкам - значения функционала в зависимости от скорости V (или наоборот); строят отображение графика из сетки матрицы Km(α, V) и/или Kmn(α, V), на которой визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов; график представляют в виде окна обзора достоверности и обеспечивают контроль интерпретатора за процессом опознания заданного типа волны и построением сейсмических динамических глубинного K(х, h) и тотального временного Т(х, t) разрезов; после этого в соответствии с процедурами, необходимыми для построения дополнительного (вспомогательного) глубинного разреза А(x, h), из цугов колебаний, зарегистрированных до и/или после маркерных отметок времени, считывают из каждой m-й сейсмотрассы по ρ компонентов (обычно ρ≤20) и накапливают их в виде псевдосинфазных функционалов Fρ; после накопления сигналов, хранящихся в каждом из m функционалов Fρ, их накаплиают по ρm сигналов в суммоцугах в виде функционалов Fρm, затем их группируют по признаку равенства номера ракурса q; для каждой из q групп находят гиперсигнал в виде функционала Fρmn супернакоплениями из ρmn амплитуд после введения известными способами поправок на n углов засветки и мьютинга; для каждой отображаемой точки из совокупности множеств скоростей (до υ) и углов наклона (до q) строят сетку двумерной матрицы из элементов Fρm, и/или Fρmn, и/или из элементов их энергий  и/или
и/или  после соответствующих вычислений в зависимости от априорно заданных углов наклона α и априорно заданного множества скоростей V по столбцам матрицы документируют значения функционалов в зависимости от угла наклона в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят двумерное отображение графика для матриц Fρm, и/или Fρnm, и/или из значений их энергий
после соответствующих вычислений в зависимости от априорно заданных углов наклона α и априорно заданного множества скоростей V по столбцам матрицы документируют значения функционалов в зависимости от угла наклона в отображаемой точке, а по строкам - значения функционала в зависимости от скорости (или наоборот); строят двумерное отображение графика для матриц Fρm, и/или Fρnm, и/или из значений их энергий  и/или на котором визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов наглядного отображения; график представляют в виде окна обзора достоверности и обеспечивают контроль интерпретатора за процессом опознания сейсмических границ и построением сейсмического предварительного глубинного разреза; уровень Fρm и/или Fρmn, и/или значения их энергий
и/или на котором визуализируют значения функционалов в виде изолиний, гистограмм или иных известных способов наглядного отображения; график представляют в виде окна обзора достоверности и обеспечивают контроль интерпретатора за процессом опознания сейсмических границ и построением сейсмического предварительного глубинного разреза; уровень Fρm и/или Fρmn, и/или значения их энергий  и/или
и/или  в пределах окна обзора достоверности сравнивают с заданным порогом обнаружения, при превышении порога обнаружения каждый последующий уровень отображаемого функционала сравнивают с предыдущим, при превышении последующего уровня над предыдущим его максимальное значение Fmax документируют совместно с аргументами υmax, и qmax в блоке максимума функционала статистической обработки Fmax(υmax, qmax), обеспечивают экстраполяцию текущих значений пластовой скорости и угла падения границ между толщами горных пород и выдают сигнал на схему разрешения передачи сигналов в буферный блок суммирования для построения динамических глубинного и тотального временного разрезов; после сигнала совпадения, который вырабатывают из схемы разрешения при условии смены в блоке Fmax предыдущего значения максимума на последующий более высокий (при монотонном возрастании скорости с глубиной) или при экстраполяции для предыдущей отображаемой точки значения Fmax на последующую отображаемую точку (при постоянстве пластовой скорости) функционал Kmn или Km заносят в буферный блок суммирования; накопления из буферного блока суммирования единичных отсчетов амплитуд Km или Kmn засылают в блок рассылки, из блока рассылки накопления засылают в регистры блока масштабирования, где с учетом шкалы нормировки вырабатывают способ изображения интенсивности точки на динамическом глубинном разрезе K(x0, hОТ) и способ изображения точки тотальной амплитуды фазы Т(х0, tOT) на тотальном временном разрезе Т(х, t), которую и засылают на суммотрассу временного разреза; абсциссу х0 точки тотальной амплитуды фазы задают в соответствии с абсциссой отображаемой точки на глубинном разрезе, а ординату tOT находят в соответствии с найденной наиболее вероятной величиной скорости vOT из условия обеспечения минимального времени хода восстающего луча из отображаемой точки с координатами (х0, h0) до ближайшего, расположенного на профиле наблюдений, регистрирующего сейсмоприемника СП(х0, 0). Обычно при определенных допущениях tOT=h0/vOT; в соответствии с направлением развертки изображают отображаемую точку также и на дополнительном глубинном разрезе А(х, h) с интенсивностью, пропорциональной величине максимального функционала Fmax заданного типа волны в пределах окна обзора достоверности; затем выполняют документирование последующих отображаемых точек дополнительного (предварительного) глубинного разреза А(х, h), присваивают Fmax положение F(υ/2, q/2) в центре матрицы окна обзора достоверности и определяют скорректированные значения углов наклона и скоростей по смещению Fmax относительно центра окна обзора достоверности, для чего сравнивают аргументы υ/2 и q/2 с υmax и qmax; величину и знак скорректированных значений для V0 и α0 определяют по разностям:
в пределах окна обзора достоверности сравнивают с заданным порогом обнаружения, при превышении порога обнаружения каждый последующий уровень отображаемого функционала сравнивают с предыдущим, при превышении последующего уровня над предыдущим его максимальное значение Fmax документируют совместно с аргументами υmax, и qmax в блоке максимума функционала статистической обработки Fmax(υmax, qmax), обеспечивают экстраполяцию текущих значений пластовой скорости и угла падения границ между толщами горных пород и выдают сигнал на схему разрешения передачи сигналов в буферный блок суммирования для построения динамических глубинного и тотального временного разрезов; после сигнала совпадения, который вырабатывают из схемы разрешения при условии смены в блоке Fmax предыдущего значения максимума на последующий более высокий (при монотонном возрастании скорости с глубиной) или при экстраполяции для предыдущей отображаемой точки значения Fmax на последующую отображаемую точку (при постоянстве пластовой скорости) функционал Kmn или Km заносят в буферный блок суммирования; накопления из буферного блока суммирования единичных отсчетов амплитуд Km или Kmn засылают в блок рассылки, из блока рассылки накопления засылают в регистры блока масштабирования, где с учетом шкалы нормировки вырабатывают способ изображения интенсивности точки на динамическом глубинном разрезе K(x0, hОТ) и способ изображения точки тотальной амплитуды фазы Т(х0, tOT) на тотальном временном разрезе Т(х, t), которую и засылают на суммотрассу временного разреза; абсциссу х0 точки тотальной амплитуды фазы задают в соответствии с абсциссой отображаемой точки на глубинном разрезе, а ординату tOT находят в соответствии с найденной наиболее вероятной величиной скорости vOT из условия обеспечения минимального времени хода восстающего луча из отображаемой точки с координатами (х0, h0) до ближайшего, расположенного на профиле наблюдений, регистрирующего сейсмоприемника СП(х0, 0). Обычно при определенных допущениях tOT=h0/vOT; в соответствии с направлением развертки изображают отображаемую точку также и на дополнительном глубинном разрезе А(х, h) с интенсивностью, пропорциональной величине максимального функционала Fmax заданного типа волны в пределах окна обзора достоверности; затем выполняют документирование последующих отображаемых точек дополнительного (предварительного) глубинного разреза А(х, h), присваивают Fmax положение F(υ/2, q/2) в центре матрицы окна обзора достоверности и определяют скорректированные значения углов наклона и скоростей по смещению Fmax относительно центра окна обзора достоверности, для чего сравнивают аргументы υ/2 и q/2 с υmax и qmax; величину и знак скорректированных значений для V0 и α0 определяют по разностям:

где индексами i и (i-1) обозначены последующие и предыдущие априорные и текущие начальные значения диапазона изменения скорости и угла падения в отображаемой точке; последовательно в блоке Fmax(υmax, qmax) заменяют в автоматическом режиме предыдущие значения диапазона (α, V) на скорректированные, тем самым размещают F(q(i-1) υ(i-1)), в центр новой скорректированной сетки значений матрицы окна обзора достоверности; при монотонном возрастании скорости с глубиной знак приращения скорости δV совпадает со знаком приращения глубины (знаком развертки отображаемых точек по столбцам); для всех q×υ углов падения и скоростей присваивают скорректированные значения F(qi, υi), среди них в пределах следующего окна обзора достоверности находят новое текущее значение Fmax, документируют очередные отображаемые точки на динамическом глубинном, тотальном временном и дополнительном глубинном разрезах с интенсивностью, соответствующей величине K(хОТ, hОТ), Т(хОТ, tОТ) и Fmax соответственно, размещают Fmax вновь в центр очередной скорректированной сетки окна обзора достоверности, и так далее до полного построения дополнительного глубинного сейсмического разреза А(х, h) и динамических глубинного K(х, h) и тотального временного Т(х, t) разрезов в соответствии с заданным режимом развертки отображаемых точек по строкам и/или столбцам.
2. Способ построения сейсмического разреза по п.1, отличающийся тем, что для дальнейшего увеличения степени достоверности построения динамического глубинного и/или тотального временного разреза из последовательности единичных сигналов в блоке рассылки выделяют и засылают в отдельные регистры блока масштабирования промежуточные и полные суммы единичных отсчетов фазы сейсмических сигналов, тем самым обеспечивают возможность составления систем линейно независимых уравнений относительно неизвестной амплитуды сигнала и среднестатистической амплитуды случайной помехи, экстраполируют линейно независимые уравнения для каждой из промежуточных сумм также и на выражения для полной суммы на основе предположения о равенстве математического ожидания случайных помех для полной и частичной последовательности единичных отсчетов, решают уравнения относительно амплитуды линейно возрастающего пропорционально числу слагаемых сигнала и возрастающей в соответствии с корнем квадратным из числа слагаемых среднестатистической амплитуды случайной помехи, документируют на отображаемой точке динамического глубинного разреза и суммотрассах тотального временного разреза найденную высокодостоверную амплитуду свободного от случайной помехи сигнала, используют найденную высокодостоверную амплитуду свободного от помехи сигнала для оценки помехозащищенности во взаимных точках и документирования тотального временного разреза.
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2009 |
|
RU2415449C1 |
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2006 |
|
RU2324205C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 4534019 A1, 06.08.1985 | |||
| СПОСОБ ПОСТРОЕНИЯ ВРЕМЕННЫХ СЕЙСМИЧЕСКИХРАЗРЕЗОВ | 0 |
|
SU289377A1 |

