Предлагаемая станция относится к области радиотехники и позволяет осуществлять радиотехническую разведку радиоэлектронных средств (РЭС) вероятного противника (РЛС, радиолинии связи и управления и др.).
Известны станции и системы контроля излучений РЭС вероятного противника(патенты РФ №2136110, 2150178, 2.275746, 2.321177; патенты США №3806926, 3891989, 3896439; патент Германии №334615; патент Великобритании №1587357; патент Франции №2447041; Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. М.: Сов. радио, 1968, с.382, рис.10.2 и др.). Из известных станций и систем наиболее близкой к предлагаемой является «Станция радиотехнической разведки» (патент РФ №2321177, НОЧК 3/00, 2006), которая и выбрана в качестве базовой.
Указанная станция обеспечивает повышение помехоустойчивости и достоверности приема сигналов разведываемых РЭС путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам. Для расширения области контроля по площади и количеству разведываемых РЭС станция радиотехнического контроля размещается на борту вертолета, маршрут полета которого прокладывается в приграничных районах без нарушения воздушного пространства противника и без осложнений дипломатического характера. Данная станция позволяет принимать сложные сигналы, точно и однозначно пеленговать источник их излучения с использованием приемных антенн, размещенных на концах лопастей несущего винта вертолета.
Однако потенциальные возможности радиотехнического контроля используются не в полной мере.
Технической задачей изобретения является расширение функциональных возможностей станции радиотехнического контроля путем оперативной визуальной оценки несущей частоты и вида модуляции (манипуляции) принимаемого сложного сигнала.
Поставленная задача решается тем, что станция радиотехнического контроля, содержащая, в соответствии с ближайшим аналогом, пеленгаторное устройство, антенное устройство и последовательно включенные приемник, анализатор параметров принимаемого сигнала, устройство запоминания и обработки полученной информации и телеметрическое устройство, выход которого является выходом станции, при этом приемник выполнен в виде последовательно включенных приемной антенны, четвертого узкополосного фильтра, первого фазоинвертора, первого сумматора, второй вход которого соединен с приемной антенной приемника, первого полосового фильтра, второго фазоинвертора, второго сумматора, второй вход которого соединен с выходами первого сумматора, второго полосового фильтра, третьего фазоинвертора, третьего сумматора, второй вход которого соединен с выходом второго сумматора, первого смесителя, второй вход которого через первый гетеродин соединен с выходом блока перестройки, первого усилителя первой промежуточной частоты, четвертого сумматора, четвертого перемножителя, второй вход которого соединен с выходом третьего сумматора, пятого узкополосного фильтра, первого амплитудного детектора, второго ключа, второй вход которого соединен с выходом четвертого сумматора, обнаружителя, второй вход которого через первую линию задержки соединен с его выходом, первого ключа, второй вход которого соединен с выходом второго ключа, второго смесителя, второй вход которого соединен с выходом второго гетеродина, и усилителя второй промежуточной частоты, выход которого является выходом приемника, последовательно подключенных к второму выходу первого гетеродина первого фазовращателя на 90°, пятого смесителя, второй выход которого соединен с выходом третьего сумматора, четвертого усилителя первой промежуточной частоты и второго фазовращателя на 90°, выход которого соединен с вторым входом четвертого сумматора, управляющий вход блока перестройки соединен с выходом обнаружителя, пеленгаторное устройство выполнено в виде двух пеленгаторных каналов, каждый из которых состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосного фильтра, к выходу первого узкополосного фильтра последовательно подключены третий перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, третий узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены вторая линия задержки, фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, вторые входы фазометров соединены с выходом опорного генератора, а выходы подключены к устройству запоминания и обработки полученной информации, антенное устройство, содержат три приемные антенны, приемная антенна приемника размещена над втулкой винта вертолета, приемные антенны пеленгаторного устройства размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором, отличается от ближайшего аналога тем, что приемник снабжен вторым амплитудным детектором, устройством формирования частотной развертки, двумя осциллографическими индикаторами, третьей линией задержки, третьим фазовращателем на 90°, пятым и шестым перемножителями и двумя фильтрами нижних частот, причем к выходу первого ключа последовательно подключены второй амплитудный детектор и вертикально отключающие пластины первого осциллографического индикатора, горизонтально отключающие пластины которого через устройство формирования частотной развертки соединены с выходом блока перестройки, к выходу первого ключа последовательно подключены третья линия задержки, пятый перемножитель, второй вход которого соединен с выходом первого ключа, первый фильтр нижних частот и вертикально отключающие пластины второго осциллографического индикатора, к выходу первого ключа последовательно подключены третий фазовращатель на 90° и шестой перемножитель, второй вход которого соединен с выходом третьей линии задержки, второй фильтр нижних частот и горизонтально отклоняющие пластины второго осциллографического индикатора.
Структурная схема предлагаемой станции радиотехнического контроля представлена на рис.1. Частотные диаграммы, иллюстрирующие образование дополнительных каналов приема, показаны на рис.2. Геометрическая схема расположения приемных антенн на вертолете изображена рис.3. Вид возможных осциллограмм на экранах осциллографических индикаторов изображена на рис.4 и 5. Векторное представление сигнала изображено на рис.6. Станция радиотехнического контроля содержит антенное устройство 1, приемник 2, пеленгаторное устройство 3, анализатор 4 параметров принимаемого сигнала, устройство 5 запоминания и обработки полученной информации и телеметрическое устройство 6.
Приемник 2 содержит последовательно включенные приемную антенну 7, четвертый узкополосный фильтр 36, первый фазоинвертор 37, первый сумматор 38, второй вход которого соединен с приемной антенной 7, первый полосовой фильтр 39, второй фазоинвертор 40, второй сумматор 41, второй вход которого соединен с выходом первого сумматора 38, второй полосовой фильтр 42, третий фазоинвертор 43, третий сумматор 44, первый смеситель 12, второй вход которого через первый гетеродин 11 соединен с выходом блока 10 перестройки, и первый усилитель 17 первой промежуточной частоты, последовательно подключенные к второму выходу первого гетеродина 11 первый фазовращатель 45 на 90°, пятый смеситель 46, второй вход которого соединен с выходом сумматора 44, четвертый усилитель 47 первой промежуточной частоты, второй фазовращатель 48 на 90°, четвертый сумматор 49, второй вход которого соединен с выходом усилителя 17 первой промежуточной частоты, четвертый перемножитель 50, второй вход которого соединен с выходом сумматора 44, пятый узкополосный фильтр 51, амплитудный детектор 52, второй ключ 53, второй вход которого соединен с выходом сумматора 49, обнаружитель 20, второй вход которого через первую линию задержки 21 соединен с его выходом, первый ключ 22, второй вход которого соединен с выходом ключа 53, второй смеситель 24, второй вход которого соединен с выходом второго гетеродина 23, и усилитель 25 второй промежуточной частоты, выход которого является выходом приемника 2 и подключен к входу анализатора 4 параметров принимаемого сигнала.
Последовательно подключенные к выходу первого ключа 22 второй амплитудный детектор 54 и вертикально отклоняющие пластины первого осциллографического индикатора 56, горизонтально отклоняющие пластины которого через 55 формирования частотной развертки соединенные с выходом блока 10 перестройки, последовательно подключенные к выходу первого ключа 22 третья линия задержки 57, пятый перемножитель 59, второй вход которого соединен с выходом первого ключа 22, первый фильтр 61 нижних частот и вертикально отклоняющие пластины второго осциллографического индикатора 63, последовательно подключенные к выходу первого ключа 22 третий фазовращатель 58 на 90°, шестой перемножитель 60, второй вход которого соединен с выходом третьей линии задержки 57, второй фильтр 62 нижних частот и горизонтально отклоняющие пластины второго осциллографического индикатора 63. Пеленгаторное устройство 3 содержит два пеленгаторных канала, каждый из которых содержит последовательно включенные приемную антенну 8 (9), смеситель 13 (14), второй вход которого соединен с выходом гетеродина 11, усилитель 18 (19) первой промежуточной частоты, перемножитель 26 (27), второй вход которого соединен с выходом усилителя 25 второй промежуточной частоты, узкополосный фильтр 28 (29). При этом к выходу первого узкополосного фильтра 28 последовательно подключены третий перемножитель 30, второй вход которого соединен с выходом второго узкополосного фильтра 29, третий, узкополосный фильтр 32 и первый фазометр 34, к выходу второго узкополосного фильтра 29 последовательно подключены вторая линия задержки 31, фазовый детектор 33, второй вход которого соединен с выходом узкополосного фильтра 29, и второй фазометр 35. Вторые входы фазометров 34 и 35 соединены с выходом опорного генератора 16, а выходы подключены к устройству 5 запоминания и обработки полученной информации. Антенное устройство 1 содержит три приемные антенны 7-9, приемная антенна 7 приемника 2 размещена над втулкой винта вертолета, приемные антенны 8 и 9 пеленгаторного устройства 3 размещены на концах лопастей несущего винта вертолета (Рис.3). Двигатель 15 кинетически связан с винтом вертолета и опорным генератором 16.
Следует отметить, что произвольный сигнал можно представить в следующем виде:
uc(t)=U(t)·cosФ(t)=U(t)·cos[ωct+φ(t)]=U(t)·cos[ωct+φн(t)+φс],
0≤t≤Tc,
где U(t) - огибающая (изменяющаяся во времени амплитуда) сигнала;
Ф(t) - результирующая фаза сигнала;
ωct - линейная составляющая фазы;
ωс - несущая частота;
ωн - нелинейная составляющая фазы;
φ(t)=φн(t)+φc - фаза сигнала;
φс, Тс - начальная фаза и длительность сигнала.
Несущая частота ωс не влияет на форму сигнала, а только смещает его спектр по оси частот. Форма сигнала зависит от функций U(t) и φ(t), поэтому целесообразно его представить в таком виде, который учитывал бы только эти функции. Это позволяет сделать комплексная огибающая сигнала, нашедшая широкое применение для описания его свойств.
Любой сигнал в комплексной форме может быть представлен следующим образом:

где  - комплексная огибающая сигнала.
- комплексная огибающая сигнала.
С учетом формул Эйлера комплексная огибающая записывается в виде: 
Исходя из понятия аналитического сигнала Uc(t) выразим, как его вещественную часть: 
Подставив в последнее выражение значение  , получим:
, получим:
uc(t)=U(t)cosφ(t)cosωct-U(t)sinφ(t)sinωct.
Следовательно, для представления любого сигнала достаточно знать его несущую частоту и двухкомпонентный векторный процесс - комплексную огибающую.
Станция радиотехнического контроля работает следующим образом.
Станция размещается на борту вертолета. Наличие вращающегося винта вертолета используется для точного и однозначного определения направления на излучающую РЭС с помощью описанного устройства 1, состоящего из трех приемных антенн 7, 8 и 9. При этом приемная антенна 7 приемника 2 размещена над втулкой винта вертолета, а приемные антенны 8 и 9 пеленгаторного устройства 3 размещены на концах лопастей несущего винта вертолета (рис.3)
Принимаемые антеннами 7-9 сигналы, например, с четырехфазной фазовой манипуляций со сдвигом (ФМн-ЧС):
u1(t)=U1cos[(ωc±Δω)t+φk(t)+φc],

 0≤t≤Tc,
0≤t≤Tc,
где U1, U2, U3, ωc, φc, Tc - амплитуды, несущая частота, начальная фаза и длительность сигнала РЭС;
±Δω - нестабильность несущей частоты сигнала, обусловленная различными дестабилизирующими факторами, в том числе и эффектом Доплера;
 - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции со сдвигом в соответствии с модулирующим кодом, причем φk(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2, 3, … N-1);
- манипулируемая составляющая фазы, отображающая закон фазовой манипуляции со сдвигом в соответствии с модулирующим кодом, причем φk(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2, 3, … N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен ФМн-ЧС сигнал длительностью Тс(Тс=Nτэ). R - радиус окружности, на которой размещены приемные антенны 8 и 9;
Ω=2πR - скорость вращения приемных антенн 8 и 9 вокруг приемной антенны 7 (скорость вращения винта вертолета);
α - пеленг (азимут) на излучающую РЭС,
поступают на первые входы смесителей 13, 14 и через сумматоры 38, 41 и 44, у которых работает только одно плечо, на первые входы смесителей 12 и 46. На вторые входы указанных смесителей подаются напряжения первого гетеродина 11 линейно изменяющейся частоты:
Uг1(t)=uг1cos(ωг1t+πγt2+φг1),
Uг1'(t)=uг1cos(ωг1t+πγt2+φг1+90°), 0≤t≤Tп,
где γ=Df/Тп.
Следует отметить, что поиск ФМн-сигналов РЭС вероятного противника в заданном диапазоне частот Df осуществляется с помощью блока 10 перестройки, который периодически с периодом Тп по пилообразному закону изменяет частоту ωг1 гетеродина 11.
На выходе смесителей 12, 46, 13 и 14 образуются напряжения комбинационных частот. Усилителями 17, 47, 18 и 19 выделяются напряжения первой промежуточной частоты соответственно:
Uпp1(t)=Uпp1cos[(ωпр1±Δω)t+φk(t)-πγt2+φпр1]
Uпp2(t)=Uпp1cos[(ωпр1±Δω))t+φk(t)-πγt2+φпр1-90°]
Uпp3(t)=uпp2cos[(ωпр1±Δω)t+φk(t)-πγt2+2π·R/λcos(Ω-α)]
Uпp4(t)=Uпp3cos[(ωпр1±Δω))t+φk(t)-πγt2-2π·R/λcos(Ω-α)],
0≤t≤Tc,
где uпp1=1/2k1·u1uг1
uпp2=1/2k1·u2uг1
uпp3=1/2k1·u3uг1
k1 - коэффициент передачи смесителей
ωпр1=ωс-ωг1 - первая промежуточная частота
Напряжение Uпp2(t) с выхода усилителя 47 первой промежуточной частоты поступает на вход фазовращателя 48 на 90°, на выходе которого образуется напряжение
U'пр4(t)=uпp1cos[(ωпр1±Δω))t+φk(t)-πγt2+φпр1-90°+90°]
=uпp1cos[(ωпр1±Δω))t+φk(t)-πγt2+φпр1]
Напряжения Uпp1(t) и U'пр4(t) поступают на два входа сумматора 49, на выходе которого образуется суммарное напряжение
UΣ(t)=uΣcos[(ωпр1±Δω))t+φk(t)-πγt2+φпр1], 0≤t≤Тс,
где uΣ=2uпp1
Это напряжение подается на второй вход перемножителя 50, на первый вход которого 45 поступает принимаемый сигнал U1(t) с выхода сумматора 44. На выходе перемножителя 50 образуется напряжение
Uг(t)=uгcos(ωг1t+πγt2+φг1), 0≤t≤Тп,
uг=1/2k2·u1·uΣ
k2 - коэффициент передачи перемножителя
Частота настройки ωпр1 узкополосного фильтра 36 выбирается равной первой промежуточной частоте ωпр1
ωн1=ωпр1
Частота настройки ωн2 узкополосного фильтра 51 выбирается равной начальной частоте первого гетеродина ωг1
ωн2=ωг1
Частота настройки ωн3 полоса пропускания Δωп1 полосового фильтра 39 выбирается следующим образом:
ωн3=(ω1+ω2)/2, Δωп1=ω2-ω1,
где ω1, ω2 - частоты двух возможных мощных сигналов, появление которых в полосе частот Δω1, расположенной «слева» от полосы пропускания Δωп приемника, приводит к образованию интермодуляционных помех.
Частота настройки ωн4 и полоса пропускания Δωп2 полосового фильтра 42 выбираются следующим образом:
ωн4=(ω3+ω4)/2, Δωп2=ω4-ω3,
где ω3, ω4 - частоты двух возможных мощных сигналов, появление которых в полосе частот Δω2, расположенной «справа» от полосы пропускания Δωп приемника, приводит к образованию интермодуляционных помех.
Напряжение Uг(t) выделяется узкополосным фильтром 51, детектируется амплитудным детектором 52 и поступает на управляющий вход ключа 53, открывая его. Ключи 22 и 53 в исходном состоянии всегда закрыты.
При этом напряжение UΣ(t) с выхода сумматора 49 через открытый ключ 53 поступает на вход обнаружителя 20. При обнаружении сигнала РЭС на выходе обнаружителя 20 появляется постоянное напряжение, которое поступает на управляющий вход блока 10 перестройки, выключая его, на управляющий вход ключа 22, открывая его, и на вход линии 21 задержки. Время задержки τЗ линии задержки 21 выбирается таким, чтобы можно было зафиксировать обнаруженный ФМн-сигнал и проанализировать его параметры.
При выключении блока 10 перестройки усилителями 17, 47, 18 и 19 выделяются следующие напряжения:
Uпp5(t)=uпp1cos[(ωпр1±Δω)t+φk(t)+φпр1]
Uпp6(t)=uпp1cos[(ωпр1±Δω)t+φk(t)+φпр1-90°]
Uпp7(t)=uпp2cos[(ωпр1±Δω)t+φk(t)+2π·R/λcos(Ω-α)]
Uпp8(t)=uпр3cos[(ωпр1±Δω)t+φk(t)-2π·R/λcos(Ω-a)], 0≤t≤Tc.
На выходе сумматора 49 в этом случае образуется следующее суммарное напряжение
UΣ1(t)=uΣcos[(ωпр1±Δω)t+φк(t)+φпр1], 0≤t≤Тс
которое через открытый ключ 22 поступает на первый вход смесителя 24, на второй вход которого подается напряжение второго гетеродина 23 со стабильной частотой ωг2
Uг2(t)=uг2cos(ωг2t+φг2).
На выходе смесителя 24 образуются напряжения комбинационных частот. Усилителем 25 выделяется напряжение второй промежуточной частоты
Uпp9(t)=uпp9cos[(ωпр2±Δω))t+φk(t)+φпр9], 0≤t≤Тс,
uпр9=1/2k1·uг2·uΣ1
ωпр2=ωпр1-ωг2 - вторая промежуточная частота
φпр9=φпр1-φг2
которое поступает на вход анализатора 4 принимаемого сигнала, где определяются длительность τэ элементарных посылок, из которых составлен ФМн-сигнал, их количество N(Tc=N·τэ) и закон фазовой манипуляции.
Напряжение Uпp9(t) с выхода усилителя 25 второй промежуточной частоты одновременно подается на вторые входы перемножителей 26 и 27 пеленгаторных каналов, на первые входы которых поступают напряжения Uпp7(t) и Uпp8(t) с выходов усилителей 18 и 19 первой промежуточной частоты соответственно. На выходах перемножителей 26 и 27 образуются фазомодулированные (ФМ) напряжения на стабильной частоте ωг2 второго гетеродина:
U4(t)=u4cos[ωг2t+φг2+2π·R/λcos(Ω-α)],
U5(t)=u5cos[ωг2t+φг2-2π·R/λcos(Ω-α)], 0≤t≤Тс,
где u4=1/2k2·uпp2·uпp9,
u5=1/2k2·uпp3·uпр9,
которые выделяются узкополосными фильтрами 28 и 29 с частотой настройки ωн=ωг2.
Знаки «+» и «-» перед величиной 2π·R/λcos(Ω-α) соответствуют диаметрально противоположным расположениям антенн 8 и 9 на концах лопастей несущего винта вертолета относительно приемной антенны 7, размещенной над втулкой винта вертолета.
Следовательно, полезная информация о пеленге α переносится на стабильную частоту ωг2 второго гетеродина 23. Поэтому нестабильность ±ω несущей частоты, вызванная различными дестабилизирующими факторами, и вид модуляции (манипуляции) принимаемого сигнала РЭС не влияют на результат пеленгации, тем самым повышается точность определения местоположения РЭС.
Причем величина, входящая в состав указанных колебаний Δφm=2π·R/λ и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы сигналов, принимаемых вращающимися антеннами 8 и 9, относительно фазы сигнала, принимаемого неподвижной антенной 7.
Пеленгаторное устройство 3 тем чувствительнее к изменению угла α, чем больше относительный размер измерительной фазы R/λ. Однако с ростом R/λ уменьшается значение угловой координаты α, при котором разность фаз превосходит значение 2π, т.е. наступает неоднозначность отсчета угла α.
Следовательно, при R/λ>1/2 наступает неоднозначность отсчета α. Устранение указанной неоднозначности путем уменьшения соотношения R/λ обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/λ часто не удается из-за конструктивных соображений.
Для повышения точности пеленгации РЭС в горизонтальной (азимутальной) плоскости приемные антенны 8 и 9 размещаются на концах лопастей несущего винта вертолета. Смещение сигналов от двух диаметрально противоположных приемных антенн 8 и 9, находящихся на одинаковом расстоянии R от оси вращения несущего винта, вызывает фазовую модуляцию, получаемую с помощью одной приемной антенны, вращающейся по кругу, радиус R, которого в два раза больше (R1=2R).
Действительно, на выходе перемножителя 30 образуется гармоническое напряжение
U6(t)=u6cos(Ω-α), 0≤t≤Tc,
где u6=1/2k2·u4·u5,
с индексом фазовой модуляции
Δφm1=2π·R1/λ,
где R1=2R, которое выделяется узкополосным фильтром 32 и поступает на первый вход фазометра 34, на второй вход которого подается напряжение опорного генератора 16
U0(t)=u0cosΩt
Фазометр 34 обеспечивает точное, но неоднозначное измерение угловой координаты α. Для устранения возникающей при этом неоднозначности отсчета угла α необходимо уменьшить индекс фазовой модуляции без уменьшения отношения R/λ. Это достигается использованием автокоррелятора, состоящего из линии задержки 31 и фазового детектора 33, что эквивалентно уменьшению индекса фазовой модуляции до величины
Δφm2=2π·d1/λ,
где d1<R
На выходе автокоррелятора образуется напряжение
U7(t)=u6·cos(Ω-α), 0≤t≤Tc
с индексом фазовой модуляции Δφm2, которое поступает на первый вход фазометра 35, на второй вход поступает напряжение U0(t) опорного генератора 16. Фазометр 35 обеспечивает грубое, но однозначное измерение угла α.
Минимальное расстояние R0 от РЭС до винта вертолета определяется из выражения
Fq(t)≈(V2·t2)/(λ·R0),
где Fq(t) - доплеровский сдвиг частоты
V=ΩR
λ - длина волны
Доплеровский сдвиг частоты измеряется в анализаторе 4 параметров принимаемого сигнала, в котором также определяется R0. Последние фиксируются в устройстве 5 запоминания и обработки полученной информации.
Местоположение РЭС определяется в устройстве 5 по измеренным значениям α и R0.
Телеметрическое устройство 6 предназначено для передачи разведывательной информации на пункт контроля.
Для оперативного визуального определения несущей частоты и вида модуляции (манипуляции) принимаемого сигнала на борту вертолета в составе приемника 2 используются два осциллографических индикатора 56 и 63.
Кроме того, предлагаемая станция радиотехнического контроля позволяет оперативно и визуально определять несущую частоту и вид модуляции (манипуляции) любого принимаемого сигнала.
Принимаемый сигнал, несущую частоту и вид модуляции (манипуляции) которого необходимо определить, можно представить в следующем виде:
uc(t)=U(t)cos[(ωc±Δω)t+φН(t)+φс], 0≤t≤Tc.
На выходе сумматора 49 в этом случае образуется следующее суммарное напряжение:
uΣ3(t)=UΣ3(t)cos[(ωпр1±Δω)t+φН(t)+φпр1],
где uΣ3(t) - огибающая суммарного сигнала;
φН(t) - нелинейная составляющая фазы, которое через открытые ключи поступает на входы амплитудного детектора 54, линии задержки 57, перемножителя 59 и фазовращателя 58 на 90°.
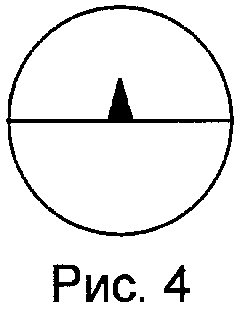
Продетектированный амплитудным детектором 54 видеосигнал поступает на вертикально отклоняющие пластины первого осциллографического индикатора 56, на горизонтально отклоняющие пластины которого подается напряжение развертки с выхода устройства 55 формирования частотной развертки. В результате этого на экране осциллографического индикатора 56 образуется импульс (частотная метка), положение которого на частотной развертке точно и однозначно определяет несущую частоту разведываемого сигнала (рис.4). При этом частотная развертка осциллографического индикатора 56 проградуирована в единицах частоты, что позволяет оператору визуально оценить несущую частоту ωс принимаемого сигнала.
На выходе линии задержки 57 и фазовращателя 58 на 90° образуются следующие напряжения:
uΣ4(t)=UΣ3(t-τ)cos[(ωпр1±Δω)(t-τ)+φН(t-τ)+φпр1],
uΣ5(t)=UΣ3(t)sin[(ωпр1±Δω)t|+φН(t)+φпр1], 0≤t≤Tc,
где τ - время задержки линии задержки 57, которые поступают на входы перемножителей 59 и 60. При этом время задержки τ целесообразно выбирать таким образом, чтобы удовлетворялось неравенство:
где Δfc - полоса частот, занимаемых принимаемым сигналом. На выходах перемножителей 59 и 60 образуются следующие напряжения:
uΣ6(t)=UΣ6(t)cos[(ωпр1±Δω)τ+φH1(t)]+UΣ6cos[2(ωпр1±Δω)t-(ωпр1±Δω)τ+φН(t)+φН(t-τ)+2φпр1];
uΣ7(t)=UΣ6(t)sin[(ωпр1±Δω)τ+φH1(t)]+UΣ6sin[2(ωпр1±Δω)t-(ωпр1±Δω)τ+φН(t)+φН(t-τ)+2φпр1];
Фильтрами 61 и 62 нижних частот из результирующих напряжений uΣ6(t) и uΣ7(t) выделяются низкочастотные напряжения:
uH1(t)=UΣ6(t)cos[(ωпр1±Δω)τ+φH1(t)];
uH2(t)=UΣ6(t)sin[(ωпр1±Δω)τ+φH1(t)],
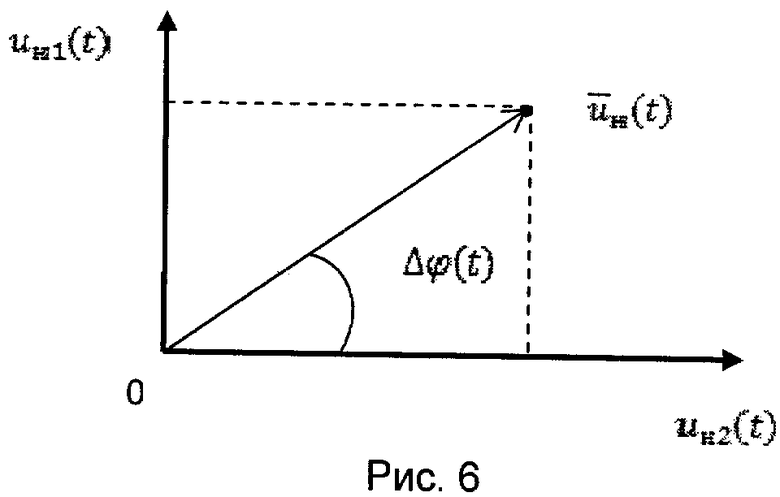
которые подаются на вертикально отклоняющие и горизонтально отклоняющие пластины второго осциллографического индикатора 63.
В указанных напряжениях содержится вся исчерпывающая информация как о значении огибающей UΣ6(t), так и разности фаз Δφ(t)=φН1(t)=φH(t-τ)-φН(t) принимаемых колебаний в двух отстоящих на τ моментах времени. Этим напряжением на плоскости соответствует точка с координатам uH1(t) и uH2(t) (рис.6). При этом очевидно, что с изменением огибающей UΣ6(t) точка смещается по радиусу из начала координат, а изменение разности фаз Δφ(t) приводит к повороту этой точки по окружности вокруг центра координат.
В связи с вышеуказанным, различным видом модуляции (манипуляции) в плоскости [uH1(t), uH2(t)] будут соответствовать различные образы. На рис.5 приведены осциллограммы различных классов сигналов, которые образуются на экране второго осциллографического индикатора 63. По истечении времени τ3 постоянное напряжение с выхода линии задержки 21 поступает на управляющий вход обнаружителя 20 и сбрасывает его содержимое на нулевое значение. При этом ключ 22 закрывается, а блок 10 перестройки включается, т.е. они переводятся в свои исходные положения.
При обнаружении сигнала следующей РЭС противника работа станции радиотехнического контроля происходит аналогичным образом.
Описанная выше работа станции радиотехнического контроля соответствует случаю приема полезных ФМн-сигналов по основному каналу на частоте ωс.
Если ложный сигнал (помеха) принимается по зеркальному каналу на частоте ω3 (фиг.2),
U3(t)=u3cos(ω3t+φ3), 0≤t≤Tc,
то усилителями 17 и 47 выделяются следующие напряжения:
Uпp10(t)=U10cos(ωпp1t+πγt2+φпр10),
Uпp11(t)=Uпp10cos(ωпp1t+πγt2+φпp10+90°), 0≤t≤Tc
где uпp10=1/2k1·u3·uг1
ωпр1=ωг1-ω3 - первая промежуточная частота;
φпр10=φг1-φ3
Напряжение Uпp11(t) с выхода усилителя 47 первой промежуточной частоты поступает на вход фазовращателя 48 на 90°, на выходе которого образуется напряжение
Uпp12(t)=Uпp10cos(ωпp1t+πγt2+φпр10+90°+90°)=
-Uпp10cos(ωпp1t+πγt2+φпр10), 0≤t≤Tc
Напряжения Uпp10(t) и Uпp12(t), поступающие на два входа сумматора 49, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по зеркальному каналу на частоте ω3, подавляется. Для этого используется «внешнее кольцо», состоящее из смесителей 12 и 46, гетеродина 11, усилителей 17 и 47 первой промежуточной частоты, фазовращателей 45 и 48 на 90°, сумматора 49 и реализующее фазокомпенсационный метод.
По аналогичной причине подавляется и ложный сигнал (помеха), принимаемый по первому комбинационному каналу на частоте ωк1.
Если ложный сигнал (помеха) принимается по второму комбинационному каналу на частоте ωк2
Uк2(t)=uк2cos(ωк2t+φк2), 0≤t≥Тк2,
то усилителями 17 и 47 выделяются следующие напряжения:
Uпp13(t)=Uпp13cos(ωпp1t-πγt2+φпр13),
Uпp14(t)=Uпp13cos(ωпp1t-πγt2+φпр13-90°), 0≤t≤Тк2,
где uпр13=1/2k1·uk2·uг1;
ωпр1=ωk2-2ωг1 - первая промежуточная частота;
φпр13=φк2-φг1.
Напряжение Uпp14(t) выхода усилителя 47 промежуточной частоты поступает на вход фазовращателя 48 на 90°, на выходе которого образуется напряжение
Uпp15(t)=uпp13cos(ωпp1t-πγt2+φпp13-90°+90°)=uпp13cos(ωпp1t-πγt2+φпр13), 0≤t≤Тк2.
Напряжения Uпp13(t) и Uпp15(t) поступают на два входа сумматора 49, на выходе которого образуется суммарное напряжение
UΣ2(t)=UΣ2cos(ωпp1t-πγt2+φпр13),
где UΣ2=2uпp13.
Это напряжение подается на второй вход перемножителя 50, на первый вход которого подается принимаемый ложный сигнал (помеха) Uк2(t). На выходе перемножителя 50 образуется напряжение
U8(t)=u8cos(2ωг1t+πγt2+φг1), 0≤t≤Тк2,
где u8=1/2k2·uк2·uΣ2,
которое не попадает в полосу пропускания узкополосного фильтра 51. Ключ 53 не открывается и ложный сигнал (помеха), принимаемый по второму комбинационному каналу на частоте ωк2, подавляется. Для этого используется «внутреннее кольцо», состоящее из перемножителя 50, узкополосного фильтра 51, амплитудного детектора 52, ключа 53 и реализующее метод узкополосной фильтрации.
Если ложный сигнал (помеха) принимается по каналу прямого прохождения на частоте ωпр1
Uп1(t)=uп1cos(ωпp1t+φг1), 0≤t≤Tп1,
то он с выхода приемной антенны 7 поступает на первый вход сумматора 38, выделяется узкополосным фильтром 36, настроенным на первую промежуточную частоту ωпр1, инвертируется по фазе на 180° в фазоинверторе 37
U'п1(t)=-uп1cos(ωпр1t+φп1), 0≤t≤Тп1.
Напряжения Uп1(t) и Uп1'(t), поступающие на два входа сумматора 38, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по каналу прямого прохождения на первой промежуточной частоте ωпр1, подавляется фильтром-пробкой, состоящим из узкополосного фильтра 36, фазоинвертором 37, сумматором 38 и реализующим фазокомпенсационный метод.
Если два мощных ложных сигнала (помех) на частотах ω1 и ω2 или несколько мощных сигналов (помех) появляются одновременно в полосе частот Δω1 «слева» от полосы пропускания Δωп приемника, способных образовать интермодуляционные помехи, то они выделяются полосовым фильтром 39, инвертируются по фазе на 180° фазоинвертором 40 и компенсируются в сумматоре 41.
Следовательно, ложные сигналы (помехи), принимаемые в полосе частот Δω1 и образующие интермодуляционные помехи, подавляются фильтром-пробкой, состоящим из полосового фильтра 39, фазоинвертора 40, сумматора 41 и реализующим фазокомпенсационный метод.
Если два мощных ложных сигнала (помехи) на частотах ω3 и ω4 или несколько мощных сигналов (помех) появляются одновременно в полосе частот Δω2 «справа» от полосы пропускания Δωп приемника, способных образовывать интермодуляционные помехи, то они выделяются полосовым фильтром 42, инвертируются по фазе на 180° фазоинвертором 43 и компенсируются в сумматоре 44.
Следовательно, ложные сигналы (помехи), принимаемые в полосе частот Δω1 и образующие интермодуляционные помехи, подавляются фильтром-пробкой, состоящим из полосового фильтра 42, фазоинвертора 43, сумматора 44 и реализующий фазокомпенсационный метод.
Траектория полета вертолета, на борту которого размещена станция радиотехнического контроля, как правило, прокладывается в приграничных районах без нарушения воздушного пространства вероятного противника и без осложнений дипломатического характера.
Станция радиотехнического контроля обеспечивает точное и однозначное определение местоположения РЭС. При этом пеленгаторное устройство инвариантно к виду модуляции (манипуляции) и нестабильности несущей частоты разведываемых сигналов.
Кроме того, станция радиотехнического контроля обеспечивает повышение помехоустойчивости и достоверности приема сигналов разведываемых РЭС. Это достигается путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам (каналу прямого прохождения, зеркальному, комбинационным и интермодуляционным каналам).
Таким образом, предлагаемая станция радиотехнического контроля по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает оперативную визуальную оценку несущей частоты и вида модуляции (манипуляции) принимаемого сложного сигнала. Это достигается путем определения и визуального анализа комплексной огибающей принимаемого сигнала. Причем оперативная визуальная оценка вида модуляции (манипуляции) принимаемого сигнала не зависит от несущей частоты и скорости передачи сообщений по каналам связи.
Тем самым функциональные возможности станции радиотехнического контроля расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2007 |
|
RU2346289C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2004 |
|
RU2275746C1 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2313911C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2321177C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2254262C1 |
| ЭЛЕКТРОННЫЕ ШАХМАТНЫЕ ЧАСЫ | 2013 |
|
RU2527662C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ | 2009 |
|
RU2429503C2 |



Предлагаемая станция относится к области радиотехники и позволяет осуществлять радиотехнический контроль радиоэлектронных (РЭС) вероятного противника (РЛС, радиолинии связи и управления. Достигаемый технический результат - расширение функциональных возможностей путем оперативной визуальной оценки несущей частоты и вида модуляции (манипуляции) принимаемого сложного сигнала. Устройство содержит антенное устройство 1, приемник 2, пеленгаторное устройство 3, анализатор 4 параметров принимаемого сигнала, устройство 5 запоминания и обработки полученной информации и телеметрическое устройство 6, приемник 2 содержит блок 10 перестройки, гетеродины 11, 23, смесители 12, 24 и 46, усилители 17 и 47 первой промежуточной частоты, обнаружитель 20, линию задержки 21, ключи 22 и 53, усилитель 25 второй промежуточной частоты, узкополосные фильтры 36 и 51, фазоинверторы 38, 41, 44, и 49, фазовращатели 45 и 48 на 90°, перемножители 50, 59 и 60, амплитудные детекторы 52 и 54, устройство 55 формирования частотной развертки, осциллографические индикаторы 56 и 63, линию задержки 57, фильтры 61 и 62 нижних частот, пеленгаторное устройство 3 содержит смесители 13 и 14, двигатель 15, опорный генератор 16, усилители 18 и 19 первой промежуточной частоты, перемножители 26, 27, 30 узкополосные фильтры 28, 29, 32, линию 31 задержки, фазовый детектор 33, фазометры 34 и 35. 6 ил.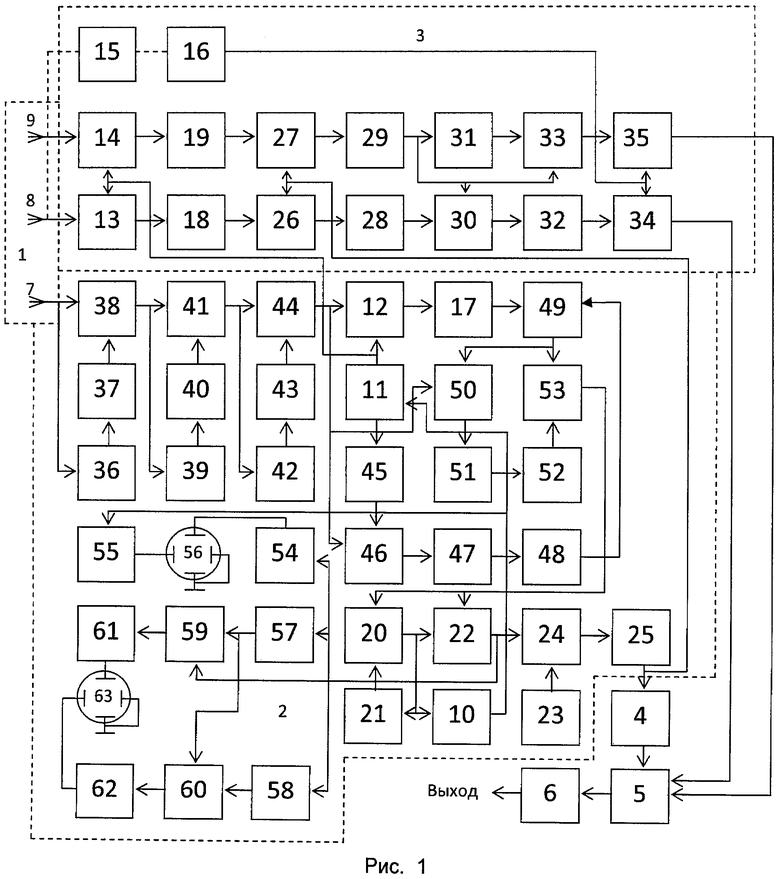
Станция радиотехнического контроля, содержащая пеленгаторное устройство, антенное устройство и последовательно включенные приемник, анализатор параметров принимаемого сигнала, устройство запоминания и обработки полученной информации и телеметрическое устройство, выход которого является выходом станции, при этом приемник выполнен в виде последовательно включенной приемной антенны, четвертого узкополосного фильтра, первого фазоинвертора, первого сумматора, второй вход которого соединен с приемной антенной, первого полосового фильтра, второго фазоинвертора, второго сумматора, второй вход которого соединен с выходом первого сумматора, второго полосового фильтра, третьего фазоинвертора, третьего сумматора, второй вход которого соединен с выходом второго сумматора, первого смесителя, второй вход которого через первый гетеродин соединен с выходом блока перестройки, первого усилителя первой промежуточной частоты, четвертого сумматора, четвертого перемножителя, второй вход которого соединен с выходом третьего сумматора, пятого узкополосного фильтра, первого амплитудного детектора, второго ключа, второй вход которого соединен с выходом четвертого сумматора, обнаружителя, второй вход которого через первую линию задержки соединен с его выходом, первого ключа, второй вход которого соединен с выходом второго ключа, второго смесителя, второй вход которого соединен с выходом второго гетеродина, и усилителя второй промежуточной частоты, выход которого является выходом приемника последовательно подключенных к второму выходу первого гетеродина первого фазовращателя на 90°, пятого смесителя, второй вход которого соединен с выходом третьего сумматора, четвертого усилителя первой промежуточной частоты и второго фазовращателя на 90°, выход которого соединен с вторым входом четвертого сумматора, управляющий вход блока перестройки соединен с выходом обнаружителя, пеленгаторное устройство выполнено в виде двух пеленгаторных каналов, каждый из которых состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосного фильтра, к выходу первого узкополосного фильтра последовательно подключены третий перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, третий узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены вторая линия задержки, фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, вторые входы фазометров соединены с выходом опорного генератора, а выходы подключены к устройству запоминания и обработки полученной информации, антенное устройство содержит три приемные антенны, приемная антенна приемника размещена над втулкой винта вертолета, приемные антенны пеленгаторного устройства размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором, отличающаяся тем, что приемник снабжен вторым амплитудным детектором, устройством формирования частотной развертки, двумя осциллографическими индикаторами; третьей линией задержки, третьим фазовращателем на 90°, пятым и шестым перемножителями и двумя фильтрами нижних частот, причем к выходу первого ключа последовательно подключены второй амплитудный детектор и вертикально отклоняющие пластины первого осциллографического индикатора, горизонтально отклоняющие пластины которого через устройство формирования частотной развертки соединены с выходом блока перестройки, к выходу первого ключа последовательно подключены третья линия задержки, пятый перемножитель, второй вход которого соединен с выходом первого ключа, первый фильтр нижних частот и вертикально отклоняющие пластины второго осциллографического индикатора, к выходу первого ключа последовательно подключены третий фазовращатель на 90°, шестой перемножитель, второй вход которого соединен с выходом третьей линии задержки, второй фильтр нижних частот и горизонтально отклоняющие пластины второго осциллографического индикатора.
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2321177C1 |
| ЛИНИЯ РАДИОСВЯЗИ | 2001 |
|
RU2193278C1 |
| ЕР 1750382 А2, 07.02.2007 | |||
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАБОЧЕГО ХОДА | 1986 |
|
RU2028508C1 |

