Настоящая заявка относится к области формирования трехмерных изображений. Она находит конкретное применение в формировании трехмерных изображений методом компьютерной томографии и описана с конкретной ссылкой на него. Однако нижеследующее описание применимо и к другим режимам формирования изображения, например позитрон-эмиссионной томографии (PET), однофотонной эмиссионной компьютерной томографии (SPECT) и т.д.
Формирование изображения методом компьютерной томографии используется для многочисленных приложений, связанных с точной регистрацией позиции. Например, формирование изображения методом компьютерной томографии иногда используется для формирования изображения злокачественных опухолей и окружающих тканей и органов, причем эти изображения используются для планирования сеансов радиотерапии. Признаки компьютерно-томографического изображения необходимо регистрировать с геометрией радиотерапевтического устройства, чтобы такое планирование было эффективным. При инвазивном формировании изображения формирование изображения методом компьютерной томографии используется для направления внедрения катетера, биопсийной иглы или иного проникающего инструмента. В еще одном примере, при многомодальном формировании изображения, компьютерно-томографические изображения пространственно регистрируются с изображениями, полученными в одном или более других режимах, например, путем формирования изображения методом магнитного резонанса, позитрон-эмиссионной томографии и т.д.
Когда формирование изображения производится в грудной области или в другом месте, пространственная регистрация или выравнивание компьютерно-томографических изображений, предпочтительно, учитывает дыхательное движение. Это принято делать с использованием измерения брюшного движения одновременно с томографическим формированием изображения. В других подходах, на пациенте размещают оптические маркеры, и движение этих оптических маркеров отслеживается видеокамерой или другим оптическим датчиком. Затем из наблюдаемого движения оптических маркеров выводится дыхательный цикл. Затем реконструированные изображения среза сохраняются, сортируются или иначе организуются на основании фазы дыхания для учета дыхательного движения.
Однако такие подходы сопряжены с определенными трудностями. Например, необходимо синхронизировать, отдельно регистрировать и сохранять данные дыхания и изображений. Раздельные наборы данных мониторинга дыхания и изображений затем необходимо коррелировать на основании меток времени и т.п. Любая ошибка в корреляции по времени между этими двумя наборами данных, например ошибка сдвига по времени между наборами данных мониторинга дыхания и изображений, может порождать существенную систематическую ошибку в сортировке изображений срезов по фазам дыхания. Дополнительно мониторинг дыхания требует специальной CCD камеры, тензометрического датчика, магнитного маяка или другого специализированного датчика дыхания, расположенного в непосредственной близости к области формирования изображения. Оптические и механические датчики (например, тензометрический датчик) препятствуют доступу к пациенту и делают систему формирования изображения более громоздкой, тогда как магнитные датчики несовместимы с устройствами формирования изображений, например, магниторезонансными сканерами. Кроме того, камеры или другие специальные датчики необходимо периодически перекалибровывать для коррекции нарушений калибровки и систематической ошибки. Кроме того, для правильной работы необходимо поддерживать прямую линию видимости между оптическими маркерами и камерой на протяжении всего периода формирования изображений. Чтобы учитывать различия в размерах и форме пациентов, одновременно поддерживая незагражденную линию видимости, могут потребоваться дополнительные камеры, а следовательно, усложнение установки. Кроме того, использование другого оборудования затруднено вследствие необходимости поддерживать незагражденную линию видимости.
Согласно одному аспекту раскрыт маркер дыхания. Распознаваемый участок способен пересекать изображения, полученные в разных позициях вдоль оси сканирования сканера формирования изображения, и распознаваем как маркирующий признак в изображениях, полученных сканером формирования изображения в разные моменты времени и в разных позициях вдоль оси сканера.
Согласно другому аспекту раскрыто устройство для организации изображений, полученных сканером формирования изображения в разные моменты времени и в разных позициях вдоль оси сканера. Маркер дыхания включает в себя удлиненный распознаваемый участок, который оперативно связан с дыханием субъекта формирования изображения, благодаря чему удлиненный распознаваемый участок перемещается в соответствии с дыханием. Удлиненный распознаваемый участок способен пересекать изображения, полученные в разные моменты времени и в разных позициях вдоль оси сканера, и распознаваем как маркирующий признак в изображениях. Блок нахождения позиции маркера способен определять позиции маркирующих признаков в изображениях.
Согласно еще одному аспекту раскрыт способ для организации изображений, полученных в разные моменты времени, с помощью маркера дыхания, который можно распознавать как маркирующий признак в полученных изображениях. Позицию маркирующего признака в выбранном полученном изображении определяют. Фазу дыхания назначают для выбранного полученного изображения на основании определенной позиции маркирующего признака. Операции определения и назначения повторяются для назначения фаз дыхания изображениям, полученным в разные моменты времени.
Согласно еще одному аспекту раскрыт цифровой носитель, на котором хранятся процессорно-выполняемые инструкции для осуществления вышеизложенного способа.
Одно преимущество состоит в том, что данные мониторинга дыхания внедряются непосредственно в данные изображений во избежание необходимости хранить и синхронизировать по времени раздельные наборы данных мониторинга дыхания и изображений.
Другое преимущество состоит в том, что, благодаря внедрению данных мониторинга дыхания в данные изображений, синхронизация достигается автоматически, что позволяет избежать ошибок сдвига по времени между данными мониторинга дыхания и данными изображений.
Еще одно преимущество состоит в том, что система формирования изображения получает данные мониторинга дыхания напрямую, без использования дополнительного измерительного оборудования.
Еще одно преимущество состоит в том, что на позиционирование пациента в системе формирования изображения не налагаются никакие ограничения, связанные с линией видимости оптического датчика, или другие геометрические ограничения.
Специалисты в данной области техники смогут выявить другие преимущества настоящего изобретения, прочитав и поняв нижеследующее подробное описание.
Изобретение можно реализовать в виде различных компонентов и сочетаний компонентов и в виде различных этапов и сочетаний этапов. Чертежи приведены исключительно в целях иллюстрации предпочтительных вариантов осуществления, но не в целях ограничения изобретения.
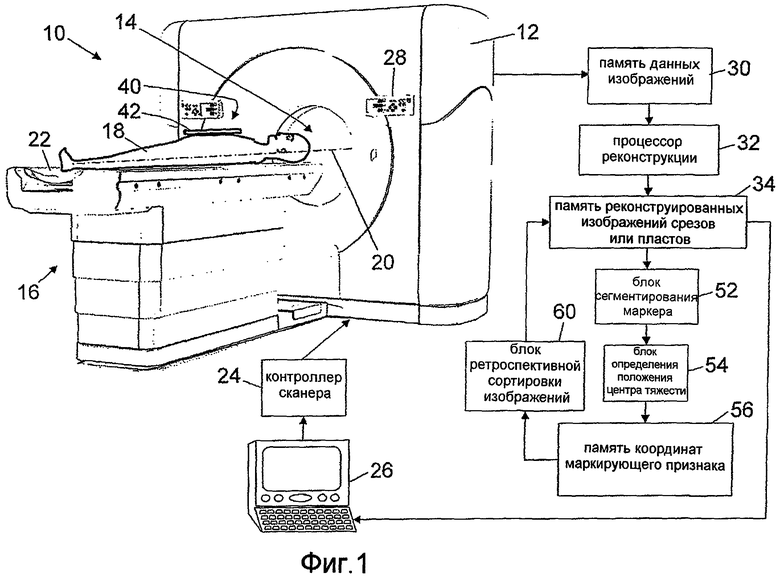
Фиг. 1 - схема компьютерно-томографической системы формирования изображения, включающей в себя мониторинг дыхания.
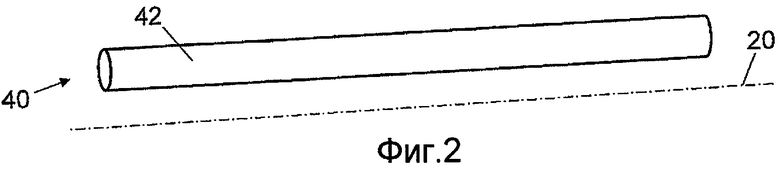
Фиг. 2 - вид в перспективе маркера дыхания, используемого в системе, показанной на фиг. 1.
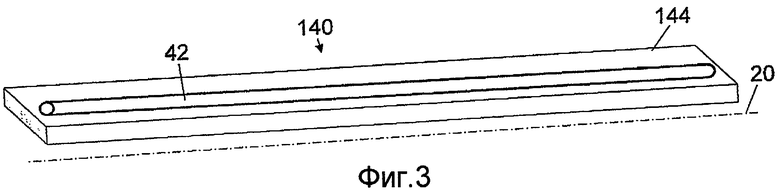
Фиг. 3 - вид в перспективе другого иллюстративного маркера дыхания.
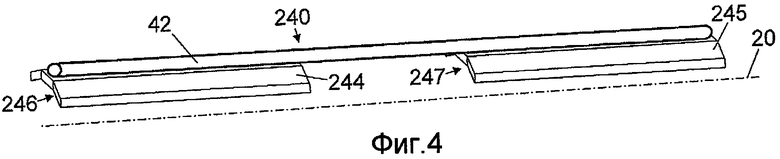
Фиг. 4 - вид в перспективе другого иллюстративного маркера дыхания.
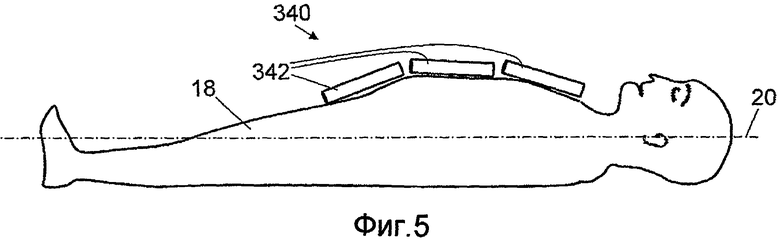
Фиг. 5 - вид в перспективе другого иллюстративного маркера дыхания, расположенного на субъекте формирования изображения.
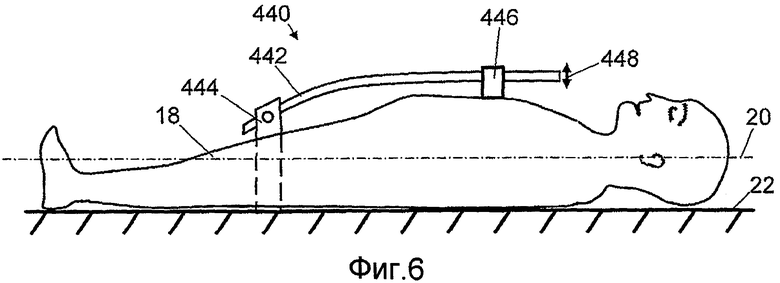
Фиг. 6 - вид в перспективе другого иллюстративного маркера дыхания, расположенного на субъекте формирования изображения, покоящемся на опоре субъекта.
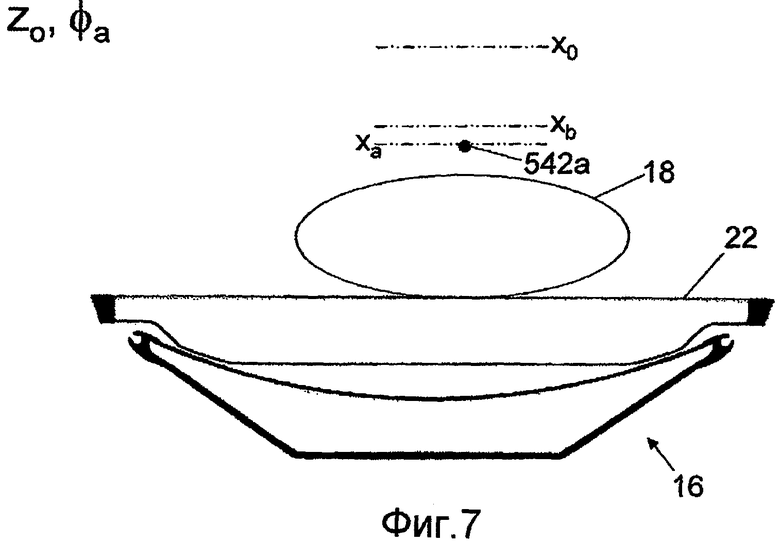
Фиг. 7 - схематическое изображение среза в выбранной позиции вдоль оси сканера и в первой фазе дыхания, близкой к полному выдоху.
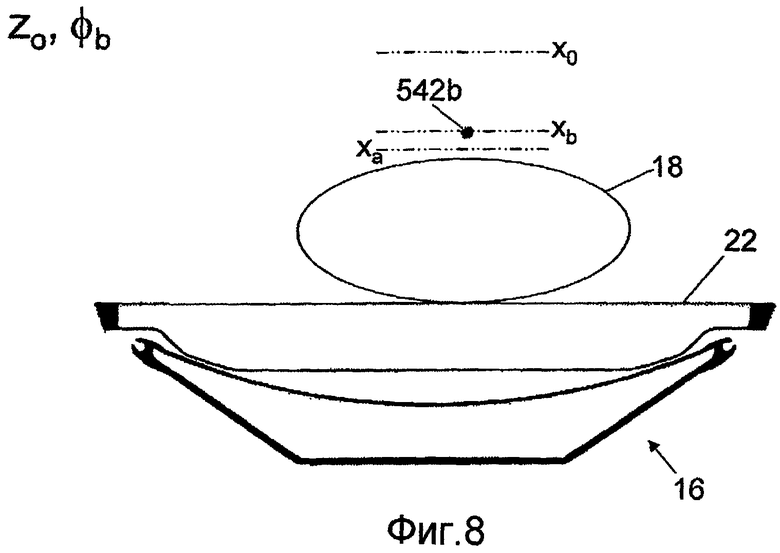
Фиг. 8 - схематическое изображение среза в той же позиции вдоль оси сканера, что и на фиг. 7, но во второй фазе дыхания, близкой к полному вдоху.
Согласно фиг. 1 компьютерно-томографический (CT) сканер 10 включает в себя неподвижный корпус 12, образующий область 14 формирования изображения, и опору 16 субъекта, которая поддерживает медицинского пациента, животное или другой субъект формирования изображения 18, который дышит согласно дыхательному циклу или совершает другое циклическое движение. Корпус 12 включает в себя компоненты, пригодные для осуществления передачи данных проекции рентгеновской томографии, полученных для формирования изображения среза, пласта или другой области. Некоторые подходящие компоненты могут включать в себя, например, рентгеновскую трубку и матрицу рентгеновских детекторов, установленные по разные стороны области 14 формирования изображения на вращающейся платформе, расположенной в корпусе 12 (рентгеновская трубка, детекторная матрица и вращающаяся платформа не показаны, но содержатся в корпусе 12). Показанный сканер 10 схематически представляет собой CT сканер Brilliance™ (доступный от Koninklijke Philips Electronics N.V., Айндховен, Нидерланды); однако можно использовать, по существу любой тип CT сканера, а также другие типы сканеров формирования изображения, например сканеры позитрон-эмиссионной томографии (PET), сканеры однофотонной эмиссионной компьютерной томографии (SPECT), сканеры формирования изображения методом магнитного резонанса (MRI) и т.д. Сканер 10 сканирует субъект формирования изображения 18 путем относительного перемещения субъекта и области 14 формирования изображения вдоль оси 20 сканера. В показанном сканере 10 с этой целью корпус 12 и область 14 формирования изображения остаются неподвижными, и опорный стол 22, на котором покоится субъект 18, расположенный вдоль оси сканера 20, перемещается через область 14 формирования изображения. Однако возможен вариант, когда субъект формирования изображения остается неподвижным, а перемещается рабочая часть сканера; например, камера ядерного излучения Skylight (не показана; доступная от Koninklijke Philips Electronics N.V., Айндховен, Нидерланды) использует детекторные головки на роботизированных кронштейнах, которые могут перемещаться вдоль оси сканера относительно неподвижного пациента для сканирования пациента вдоль оси сканера.
Сканирование может осуществляться различными способами. В подходе множественных срезов субъект 18 формирования изображения остается неподвижным относительно области формирования изображения 14 при получении данных проекции, соответствующих срезу, пласту, сформированному в виде набора соседних срезов, или другой области формирования изображения. По завершении получения данных для двухмерного или тонкого трехмерного среза субъект 18 формирования изображения продвигается на выбранное расстояние или шаг вдоль оси 20 сканера, чтобы другой срез, который соседствует с, частично перекрывается или отделен от предыдущего среза или пласта, располагался в области 14 формирования изображения. Получают данные изображений для этого нового среза, и субъект 18 снова продвигается на выбранное расстояние или шаг, и т.д., для получения данных изображений для совокупности срезов вдоль оси 20 сканера.
В непрерывном подходе субъект 18 непрерывно продвигается вдоль оси 20 сканера по мере получения данных проекции. Для показанного компьютерно-томографического сканера 10 это обычно приводит к спиральной орбите источника рентгеновского излучения и матрицы рентгеновских детекторов относительно субъекта 18 формирования изображения; поэтому, этот подход иногда называется "спиральным CT". Для некоторых других режимов формирования изображения, например PET, детекторы не вращаются. Полученные данные изображений соответствующим образом сортируются в наборы данных, каждый из которых получен в течение короткого интервала времени, которые пригодны для реконструкции изображения среза, пласта или другой области.
В другом примере в случае формирования изображения методом магнитного резонанса сканер формирования изображения компоненты и субъект формирования изображения обычно неподвижны, и изображения получают в разных позициях вдоль оси сканера, накладывая подходящие градиенты магнитного поля, позволяющие выбирать срез, пласт или другую область. В некоторых магниторезонансных сканерах пациент располагается в цилиндрическом канале, образованном корпусом, и магниторезонансные изображения получаются в виде двухмерных или тонких трехмерных срезов, перпендикулярных оси сканера и разнесенных вдоль нее, причем ось сканера совпадает с осью цилиндрического канала. В ряде случаев разнесенные срезы или пласты могут частично перекрываться. В системах с закрытым каналом канал обычно закрыт за исключением отверстий на одном или (более обычно) двух концах. В системах с открытым каналом цилиндрический канал дополнительно включает в себя продольное отверстие, которое облегчает работу с пациентами, страдающими клаустрофобией, и обеспечивает более удобный доступ к пациенту со стороны медицинского персонала.
Снова возвращаясь к примеру компьютерной томографии, показанной на фиг. 1, можно видеть, что, независимо от того, производится ли сканирование пошагово (например, в режиме множественных срезов) или непрерывно (например, в спиральном режиме), сканер 10 формирования изображения соответствующим образом управляется контроллером 24 сканера, который получает параметры сканирования, рецепты или другие вводы пользовательского выбора через пользовательский интерфейс 26. В показанном варианте осуществления пользовательский интерфейс 26 также используется для отображения изображений, генерируемых сканером 10 формирования изображения, и, в некоторых вариантах осуществления, пользовательский интерфейс 26 дополнительно используется для диагностического анализа изображений. В других вариантах осуществления предусмотрен отдельный графический пользовательский интерфейс для просмотра и необязательного анализа изображений. В некоторых вариантах осуществления сканер 10 формирования изображения включает в себя средства управления 28, смонтированные на сканере, которые заменяют средства управления пользовательского интерфейса 26, или дублируют средства управления пользовательского интерфейса 26, или обеспечивают дополнительные или альтернативные средства управления для эксплуатации сканера 10 формирования изображения.
Согласно фиг. 1 полученные данные изображений, например данные проекции в показанном примере компьютерной томографии, хранятся в памяти 30 данных изображений. Процессор реконструкции 32 реконструирует изображения из данных изображений, полученных сканером 10 формирования изображения в разные моменты времени и в разных позициях вдоль оси 20 сканера, для создания набора изображений, полученных сканером 10 формирования изображения в разные моменты времени и в разных позициях вдоль оси 20 сканера. Реконструированные изображения, полученные в разные моменты времени и в разных позициях вдоль оси 20 сканера, соответствующим образом сохраняются в памяти 34. Очевидно, что блоки памяти 30, 34 могут представлять собой электрическую память (например, ОЗУ, флэш-память и т.д.), магнитную память (например, жесткий диск), оптическую память (например, оптический диск) или другую энергозависимую или энергонезависимую память.
В показанном случае компьютерно-томографического сканера 10 реконструированные изображения, полученные сканером 10 формирования изображения в разные моменты времени и в разных позициях вдоль оси 20 сканера, обычно являются двухмерными изображениями среза или трехмерными изображениями тонкого среза, имеющего некоторую конечную толщину или количество вокселей в направлении оси 20 сканера. Например, показанный CT сканер Brilliance™ доступен с детекторными матрицами, пригодными для одновременного формирования изображений шести срезов (например, каждое изображение пласта состоит из шести срезов или, эквивалентно, имеет толщину в шесть вокселей, в многосрезовом режиме формирования изображения), десяти срезов, шестнадцати срезов и т.д. Каждое изображение получается в течение относительно короткого периода времени относительно периода дыхательного цикла субъекта 18 формирования изображения, и поэтому получается примерно в одной фазе дыхания. В высокоскоростном компьютерно-томографическом сканере вращающаяся платформа может вращаться с частотой 300 об/мин или быстрее, обеспечивая получение данных изображений для большого количества срезов в минуту. С другой стороны, данные изображений, из которых реконструируются изображения среза, полученные в разных позициях вдоль оси 20 сканера, получаются в, по существу, разные моменты времени, и поэтому, в общем случае, имеют разные соответствующие фазы дыхания. Например, совокупность изображений среза или пласта может содержать набор данных CINE или 4D-CT, охватывающий существенную часть дыхательного цикла, или охватывающий весь дыхательный цикл, или охватывающий совокупность дыхательных циклов.
Согласно фиг. 1 для назначения фазы дыхания (или фазы дыхания) каждому полученному изображению маркер дыхания 40, включающий в себя удлиненный распознаваемый участок 42, способен пересекать изображения срезов или других областей, полученные в разные моменты времени и в разных позициях вдоль оси сканера. По меньшей мере, распознаваемый участок 42 маркера дыхания 40 распознаваем (например, видим или оставляет характеристику, пространственно локализующую представление или артефакт изображения, и т.д.) как маркирующий признак в изображениях. Для показанного примера компьютерной томографии распознаваемость удлиненного распознаваемого участка 42 соответствующим образом достигается за счет включения в удлиненный распознаваемый участок 42 материала, который, по меньшей мере, частично непрозрачен или поглощает рентгеновские лучи или другое излучение, используемое при формировании изображения методом компьютерной томографии. Например, если удлиненный распознаваемый участок 42 выполнен из дерева, пластика или плотной пены, то он будет видим в изображениях среза или пласта, полученных компьютерно-томографическими сканерами, использующими источник рентгеновского излучения. С другой стороны, более плотный материал, например металл, в общем случае, менее пригоден, поскольку металлический маркер имеет тенденцию к образованию затенения, тянучек или других артефактов в реконструированных изображениях среза или пласта. Для компьютерной томографии предпочтительно использовать материал, имеющий свойство поглощения рентгеновских лучей, примерно такое же, как у воды или человеческой ткани. В магниторезонансных сканерах формирования изображения предпочтительно использовать материал, резонирующий на частоте, равной или близкой к частоте магнитного резонанса. Для SPECT и PET, удлиненный распознаваемый участок может включать в себя радиоактивное вещество для обеспечения распознаваемости детекторами радиации. Например, удлиненный распознаваемый участок для SPECT или PET может включать в себя пустотелую трубку, содержащую жидкость, которая включает в себя радиоактивное вещество. Радиоактивное вещество может совпадать с или отличаться от радиофармацевтического препарата, используемого для формирования изображения SPECT или PET. Очевидно, что поскольку удлиненный распознаваемый участок 42 является протяженным и проходит через изображения в разных позициях вдоль оси сканера 20, соответствующий маркирующий признак можно будет распознать в каждом полученном изображении. Маркер дыхания 40 дополнительно оперативно связан с дыханием субъекта 18 формирования изображения, благодаря чему удлиненный распознаваемый участок 42 перемещается в соответствии с дыханием.
Согласно фиг. 1 и с дополнительной ссылкой на фиг. 2 в некоторых вариантах осуществления маркер дыхания 40 включает в себя удлиненный распознаваемый участок 42, который покоится поверх груди, торса, живота или другого участка субъекта 18 формирования изображения, благодаря чему он опускается и поднимается в соответствии с фазами вдоха и выдоха дыхательного цикла, соответственно. В этом варианте осуществления оперативная связь маркера дыхания 40 с субъектом 18 формирования изображения достигается благодаря наличию удлиненного распознаваемого участка 42, покоящегося на субъекте 18 формирования изображения и поддерживаемого им. Хотя это не показано, оперативная связь может расширяться за счет включения ремней, клея или другого соединительного механизма, который помогает удерживать удлиненный распознаваемый участок 42.
Согласно фиг. 3 в других вариантах осуществления маркер дыхания 140 напоминает маркер дыхания 40, но дополнительно включает в себя прокладочный участок 144, который располагается между удлиненным распознаваемым участком 40 и субъектом 18 формирования изображения. Прокладочный участок 144 в некоторых вариантах осуществления имеет относительно низкую или нулевую видимость в изображениях среза или пласта по сравнению с удлиненным распознаваемым участком 40. Например, прокладочный участок 144 может быть выполнен из пенного материала, который имеет относительно низкую видимость в компьютерно-томографических изображениях. Немагнитный и неэлектропроводящий прокладочный материал пригоден для использования в магниторезонансном сканере формирования изображения, поскольку такой материал обычно имеет низкую или нулевую видимость в полученных магниторезонансных изображениях. Прокладочный участок 144 обеспечивает разделение между удлиненным распознаваемым участком 40 и субъектом 18 формирования изображения, которое помогает очерчивать маркирующий признак, соответствующий удлиненному распознаваемому участку 40, в изображениях среза или пласта. В этом варианте осуществления оперативная связь маркера дыхания 140 с субъектом 18 формирования изображения достигается за счет прокладочного участка 144, который оперативно связывает удлиненный распознаваемый участок 42 с субъектом 18 формирования изображения. Хотя это не показано, оперативная связь может расширяться за счет включения ремней, клея или другого соединительного механизма, который помогает удерживать прокладочный участок 144 на субъекте 18. Кроме того, удлиненный распознаваемый участок 40 можно приклеивать, привинчивать, вплавлять, внедрять или иначе прикреплять к прокладочному участку 144. Например, удлиненный распознаваемый участок 40 можно заключать в оболочку или кожух из прокладочной пены.
Согласно фиг. 4 в других вариантах осуществления маркер дыхания 240 напоминает маркер дыхания 140, но дополнительно включает в себя прокладочные участки 244, 245, которые разнесены вдоль удлиненного распознаваемого участка 40 и имеют контуры 246, 247, способные, в общем случае, согласовываться с контактным участком субъекта 18 формирования изображения. В этом варианте осуществления оперативная связь маркера дыхания 240 с субъектом 18 формирования изображения достигается через прокладочные участки 244, 245 и контуры 246, 247, которые оперативно связывают удлиненный распознаваемый участок 42 с субъектом 18 формирования изображения. Хотя это не показано, оперативная связь может расширяться за счет включения ремней, клея или другого соединительного механизма, который помогает удерживать прокладочные участки 244, 245 на субъекте 18. Кроме того, удлиненный распознаваемый участок 40 можно приклеивать, привинчивать, вплавлять, внедрять или иначе прикреплять к прокладочным участкам 244, 245. В некоторых возможных вариантах осуществления удлиненный распознаваемый участок 40 вставляется с возможностью скольжения в один или оба из прокладочных участков 244, 245.
Маркеры дыхания 40, 140, 240 включают в себя удлиненный распознаваемый участок 42, который обычно является, по существу, жестким относительно сил, прилагаемых к маркеру дышащим пациентом, благодаря чему, по меньшей мере, удлиненный распознаваемый участок 42 остается, по существу, негибким, когда он перемещается в соответствии с дыханием пациента 18. Некоторое отсутствие жесткости может быть приемлемым, например изгибание удлиненного распознаваемого участка в течение определенных периодов дыхательного цикла. Также предусмотрено использование нежесткого (т.е. весьма гибкого) маркера, например удлиненного чехла из распознаваемого материала, который облекает пациента 18 и перемещается в соответствии с дыханием. Однако, при использовании весьма гибкого маркера, корреляция между движением отображаемого маркирующего признака и фазой дыхания может усложняться и, предположительно, изменяться с позицией вдоль оси 20 сканера.
Согласно фиг. 5 в некоторых вариантах осуществления маркер дыхания 340 напоминает маркер дыхания 40, но имеет вместо удлиненного распознаваемого участка 42 совокупность распознаваемых участков 342, которые разнесены вдоль оси сканера 20 и перемещаются независимо в соответствии с дыханием субъекта 18 формирования изображения. Распознаваемые участки 342 могут находиться непосредственно на субъекте 18 формирования изображения, как показано на фиг. 5, или может включать в себя подходящие прокладки, которые могут быть оконтурены или не оконтурены. Совокупность распознаваемых участков 342 может, например, включать в себя совокупность элементов, гранул, шариков, звеньев цепи, жидкостных камер в оконтуренной трубке и т.д.
Согласно фиг. 6 в других вариантах осуществления маркер дыхания 440 имеет существенно более сложную конфигурацию. В примере, показанном на фиг. 6, модифицированный удлиненный распознаваемый участок 442 не является прямым, но имеет некоторую кривизну, которая, в необязательном порядке, совпадает с кривизной субъекта 18. Шарнирное соединение 444 на конце удлиненного распознаваемого участка 442 прикреплено к столу 22 опоры 16 субъекта, который поддерживает субъект 18 формирования изображения. Соединение 446 субъекта отстоит от шарнирного соединения 444 и оперативно соединяет удлиненный распознаваемый участок 442 с субъектом 18 формирования изображения, благодаря чему удлиненный распознаваемый участок 442 поворачивается (движение, указанное двусторонней стрелкой 448) вокруг шарнирного соединения 444 в соответствии с дыханием субъекта 18 формирования изображения. В примере, показанном на фиг. 6, соединение 446 субъекта представляет собой неподвижный кронштейн или стойку, который/ая покоится на груди, торсе, животе или другом участке субъекта 18 формирования изображения. Хотя это не показано, соединение 446 субъекта может расширяться за счет включения ремней, клея или другого соединительного механизма, который помогает удерживать соединение 446 субъекта на субъекте 18.
Согласно фиг. 1 маркер дыхания 40 (или, эквивалентно, один из иллюстративных альтернативных маркеров дыхания 140, 240, 340, 440) используется для корреляции движения или позиции маркера 40 с дыхательным циклом субъекта 18 для вывода фазы дыхания или фазы дыхания субъекта на момент получения каждого изображения (например, каждого двухмерного или тонкого трехмерного изображения среза в случае показанного компьютерно-томографического сканера 10). Блок 52 сегментирования маркера обрабатывает каждое изображение для очерчивания маркирующего признака в изображении. Например, блок сегментирования 52 может использовать алгоритм выращивания области из затравки, выполняемый на изображениях для отделения вокселей маркирующего признака от вокселей, образующих изображение субъекта 18 или фона (например, воздуха или другой окружающей среды, стол 22 и т.д.). Затравка идентифицируется в изображении вручную, например, путем наведения курсора и кликанья мышкой на видеодисплее пользовательского интерфейса 26, где отображается изображение пласта или среза, или автоматически, например, на основании предполагаемых интенсивностей вокселей маркирующего признака. Алгоритм выращивания области из затравки переходит к агрегированным вокселям в выбранном диапазоне Хаунсфилда, в котором, предположительно, располагаются воксели маркирующего признака. Результатом может быть, например, двоичное изображение, в котором воксели очерченного маркирующего признака имеют значение "1", тогда как воксели вне сегментированного маркирующего признака имеют значение "0". Очевидно, что для двухмерного изображения среза или тонкого трехмерного изображения среза, имеющего малую толщину в направлении оси сканера, причем маркирующий признак обычно имеет поперечное сечение круглой, эллиптической или другой формы, соответствующее поперечному сечению удлиненного распознаваемого участка 42 маркера дыхания 40 в изображении среза. Имея предполагаемые форму и размер маркирующего признака, можно ускорить процесс сегментирования и способствовать автоматическому очерчиванию маркирующего признака.
Согласно вариантам осуществления, в которых прокладки 144, 244, 245 (см. фиг. 3 и 4) используется для отделения маркера дыхания от пациента, ожидается, что это отделение повысит точность и скорость процесса сегментирования. Очевидно, что эти преимущества использования прокладки применимы также к вариантам осуществления, в которых распознаваемый участок не является протяженным, например, может, соответствующим образом, быть случаем использования совместно с плоскопанельным рентгеновским устройством формирования изображения или другим устройством формирования изображения, которое не получает совокупность изображений в разные моменты времени в направлении оси сканирования. Такие варианты осуществления сохраняют преимущество наличия маркирующего признака дыхания, объединенного с изображениями (в отличие от наличия раздельных наборов данных изображений и индексирования по времени), и если прокладка используется, также сохраняют преимущество наличия маркирующего признака, отстоящего от дышащего пациента в изображении для облегчения быстрого и точного сегментирования маркирующего признака.
После генерации очерченного маркирующего признака блоком сегментирования 52 блок 54 определения положения центра тяжести определяет положение центра тяжести очерченного маркирующего признака. В случае, когда изображение среза, по существу, поперечно пересекается удлиненным распознаваемым участком, имеющим, в общем случае, эллиптическое поперечное сечение, центр тяжести или другая характеристическая центральная точка очерченного маркирующего признака соответствующим образом оценивается с использованием алгоритма эллиптической аппроксимации, например, раскрытого в Fitzgibbon et al., IEEE Pami 21(5): 476-480 (1999). Можно использовать и другие алгоритмы нахождения центра тяжести или другой статистической (например, средней) позиции очерченного маркирующего признака. Можно использовать алгоритмы, основанные на круглом поперечном сечении, а не на эллиптическом поперечном сечении, но они обычно менее точны. Если удлиненный распознаваемый участок 42 имеет некруглое и неэллиптическое поперечное сечение, например квадратное поперечное сечение, можно использовать соответствующий алгоритм нахождения центра тяжести для конкретной предлагаемой формы поперечного сечения. Вместо того чтобы работать с двоичным сегментированным изображением, блок сегментирования 52 может вырабатывать представление очерченного маркирующего признака по шкале серого, и можно использовать представление очерченного маркирующего признака посредством значений вокселей в качестве весовых коэффициентов для эллиптической аппроксимации или другого алгоритма нахождения центра тяжести. Например, вокселям со значениями по шкале серого, относительно близкими к наиболее вероятному значению по шкале серого, может назначаться более высокий вес, чтобы, в общем случае, повысить точность и надежность оценивания центра тяжести. Блок 54 определения положения центра тяжести выдает для каждого изображения одно или несколько значений координат маркирующего признака, которые хранятся в памяти 56 координат маркирующего признака совместно с индексом позиции изображения вдоль оси 20 сканера и времени (например, среднего времени) получения изображения. Как и в отношении блоков памяти 30, 34, память 56 может быть электронной, магнитной, оптической или памятью другого типа.
Блок 60 ретроспективной сортировки изображений способен сортировать изображения среза или пласта по фазе дыхания на основании определенных позиций маркирующего признака, хранящихся в памяти 56. Каждое изображение среза или пласта аннотируется позицией вдоль оси 20 сканера, меткой времени получения (например, средним временем метки времени получения) и позицией центра тяжести маркирующего признака. Эта информация используется для применения стандартного алгоритма ретроспективной сортировки по фазе или амплитуде, например, как описано в Pan et al., MedPhys 31(2):333-340 (2004). Корреляция позиции или траектории маркирующего признака в изображении среза или пласта, по меньшей мере, в одном измерении с фазой дыхания может включать в себя регулировку позиции вдоль оси сканера, для учета различных траекторий маркирующего признака в разных точках вдоль оси сканера 20. Например, в случае маркера дыхания 340, показанного на фиг. 5, траектории маркирующих признаков, связанные с разными независимо движущимися распознаваемыми участками 342, в общем случае, различаются. Аналогично в случае маркера дыхания 440, показанного на фиг. 6, траектории маркирующих признаков для изображений среза или пласта, расположенных относительно дальше от шарнирного соединения 444, будут, в общем случае, иметь более высокие амплитуды, чем траектории маркирующих признаков для изображений среза или пласта, расположенных относительно ближе к шарнирному соединению 444. После сортировки по фазе дыхания, изображения среза или пласта, имеющие, по существу, одну и ту же назначенную фазу дыхания, в необязательном порядке, объединяются для формирования представления в виде объемного изображения фазы дыхания, или пространственно совмещенные изображения среза или пласта, имеющие разные назначенные фазы дыхания, могут объединяться для формирования изменяющейся во времени последовательности дыхания, и т.д.
На фиг. 7 и 8 схематически показаны иллюстративные изображения среза. На фиг. 7 схематически показано изображение среза, полученное в позиции, обозначенной z0, вдоль оси сканера 20 (обозначенной в этом примере как z-ось) и в фазе дыхания, обозначенной ϕa. На фиг. 8 схематически показано изображение среза, полученное в той же позиции z0 вдоль оси сканера 20, но в другой фазе дыхания, обозначенной z0. Изображения среза имеют пространственную опорную позицию x0 в направлении x. Для фазы дыхания ϕa (фиг. 7) маркирующий признак имеет центр тяжести 542a в позиции xa относительно опорной позиции x0. Для фазы дыхания ϕb (фиг. 8) маркирующий признак имеет центр тяжести 542b в позиции xb относительно опорной позиции x0, где xb в общем случае отличается от xa. Можно видеть, что позиция xa соответствует субъекту 18 формирования изображения, имеющего сжатую грудь, и соответствует точке вблизи полного выдоха. Аналогично позиция xb соответствует субъекту 18 формирования изображения, имеющему расширенную грудь, и соответствует точке вблизи полного вдоха. В общем случае предполагается траектория позиций между полным выдохом (xa) и полным вдохом (xb,), и блок сортировки 60 может назначать фазу дыхания каждому изображению на основании позиции центра тяжести относительно его крайних положений движения в направлении x. Хотя это не показано, траектория или движение центра тяжести может быть более сложным, например включающим в себя компоненты движения в направлениях x и y, и такие сложные траектории или движения соответствующим образом учитываются для корреляции движения с фазой дыхания. Опорная позиция x0 может быть задана относительно системы координат изображения сканера или может быть задана относительно фиксированной позиции признака в изображении, например позиции опорного стола 22.
Благодаря включению удлиненного распознаваемого участка 42, 342, 442 в маркер дыхания 40, 140, 240, 340, 440, дыхание надежно отслеживается по ходу формирования изображения вдоль оси 20 сканера, поскольку каждое изображение среза вдоль оси 20 сканера будет, в общем случае, поперечно удлиненному распознаваемому участку 42, 342, 442 и пересекаться им. Напротив, непротяженный маркер, например маркер в виде кнопки или жетона будет распознаваем только в одном или нескольких изображениях среза вблизи маркера в виде кнопки или жетона. В конфигурации, показанной на фиг. 1, сканер 10 формирования изображения представляет собой компьютерно-томографический сканер, и субъект 18 формирования изображения является человеческим субъектом формирования изображения, размещенным так, что изображения среза являются осевыми изображениями среза. Однако сканер формирования изображения может представлять собой PET, SPECT или сканер формирования изображения другого типа, и дышащий субъект формирования изображения может быть человеческим или животным субъектом формирования изображения. Следует понимать, что изображения среза или пласта, в общем случае, поперечны удлиненному распознаваемому участку 42, 342, 442, но не обязательно точно перпендикулярны удлиненному распознаваемому участку 42, 342, 442. Например, некоторые сканеры формирования изображения могут располагаться в наклонной геометрии. Например, CT сканер Brilliance™ может иметь корпус 12 (и, следовательно, срезы или пласты формирования изображения), наклоненный относительно оси сканера 20. Дополнительно или альтернативно удлиненный распознаваемый участок 42, 342, 442 может быть наклонен или скошен относительно оси сканера 20. Например, распознаваемые участки 342 маркера дыхания 340 не являются взаимно коллинеарны, и модифицированный удлиненный распознаваемый участок 442 маркера дыхания 440 не является прямым, но имеет некоторую кривизну. Такие отклонения от в точности перпендикулярного размещения между изображениями среза или пласта и удлиненным распознаваемым участком 42, 342, 442 приемлемы при условии, что удлиненный распознаваемый участок 42, 342, 442 в достаточной степени поперечен изображениям среза или пласта, благодаря чему удлиненный распознаваемый участок 42, 342, 442 проходит через совокупность изображений среза или пласта для обеспечения маркирующего признака в каждом изображении среза или пласта.
Компоненты 52, 54, 60 для анализа маркирующих признаков в изображениях и для корреляции маркирующих признаков с фазой дыхания можно физически реализовать по-разному. В некоторых вариантах осуществления носитель информации, например магнитный диск, оптический диск, оперативная память (ОЗУ), сетевое серверное хранилище и т.д., хранит инструкции, которые, при выполнении процессором, реализуют компоненты 52, 54, 60, которые осуществляют способ для организации изображений, полученных сканером 10 формирования изображения в разные моменты времени и в разных позициях вдоль оси 20 сканера с помощью удлиненного маркера дыхания 40, 140, 240, 340, 440, способного пересекать изображения и распознаваемого как маркирующий признак в изображениях. Такой носитель информации может быть интегрирован с носителями информации, содержащими инструкции для реализации контроллера 24 сканера, или для реализации отображения изображения, и т.д., или один и тот же носитель информации может хранить как инструкции для обработки сортировки по фазе дыхания, так и инструкции для управления сканером, отображения изображений, и т.д. В некоторых вариантах осуществления компоненты 52, 54, 60 для анализа маркирующих признаков в изображениях реализованы в виде автономной системы последующей обработки, которая принимает и организует ранее полученные изображения с помощью установленного удлиненного маркера дыхания 40, 140, 240, 340, 440. В такой конфигурации последующей обработки сканер формирования изображения модифицирован в том отношении, что маркер дыхания 40, 140, 240, 340, 440 устанавливается или загружается пациентом 18, что упрощает модернизацию существующих сканеров формирования изображения. Когда компоненты анализа 52, 54, 60 включены в модернизацию, предполагается, что модификация существующей системы формирования изображения дополнительно включает в себя соответствующее обновление программного обеспечения, добавляющее компоненты анализа 52, 54, 60.
В некоторых вариантах осуществления изображения в памяти 34 организуются в виде 4D изображений (например, с тремя пространственными координатами, например, декартовыми координатами x, y, z, и временной координатой t). Это обеспечивает полное 3D изображение для каждой фазы и облегчает отображений изображений CINE отдельных срезов, объемов, поверхностей и т.д. Соответствующие изображения в разных фазах дыхания можно вычитать, объединять, преобразовывать к общей фазе и т.д.
Изобретение было описано со ссылкой на предпочтительные варианты осуществления. На основании вышеприведенного подробного описания можно предложить другие модификации и изменения. Предполагается, что изобретение включает в себя все подобные модификации и изменения при условии, что они входят в объем прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к медицинской диагностике. Устройство сортировки изображения содержит маркер дыхания, содержащий распознаваемый участок, выполненный с возможностью пересечения изображений, полученных в разных позициях вдоль оси сканирования сканера формирования изображения, и распознаваемый как маркирующий признак в изображениях, полученных сканером формирования изображения в разные моменты времени и в разных позициях вдоль оси сканера. Процессор сконфигурирован с возможностью определения положений маркирующих признаков в изображениях и сортировки изображений по фазе дыхания на основании определенных положений маркирующих признаков в изображении. Раскрыты устройство для организации изображений, способ для организации изображений и цифровой носитель, на котором хранятся процессорно-выполняемые инструкции для осуществления способа. Технический результат состоит в обеспечении ретроспективной сортировки изображений на основании фазы дыхания. 4 н. и 17 з.п. ф-лы, 8 ил.
1. Устройство сортировки изображения, содержащее
маркер дыхания (40, 140, 240, 340, 440), содержащий
распознаваемый участок (42, 342, 442), выполненный с возможностью пересечения изображений, полученных в разных позициях вдоль оси (20) сканирования сканера (10) формирования изображения, и распознаваемый как маркирующий признак в изображениях, полученных сканером формирования изображения в разные моменты времени и в разных позициях вдоль оси сканера; и
процессор (52, 54, 60), сконфигурированный с возможностью определения положений маркирующих признаков в изображениях и сортировки изображений по фазе дыхания на основании определенных положений маркирующих признаков в изображении.
2. Устройство по п.1, в котором маркер дыхания (140, 240) дополнительно включает в себя
прокладочный участок (144, 244, 245), отделяющий распознаваемый участок (42, 342) от субъекта (18) формирования изображения.
3. Устройство по п.2, в котором прокладочный участок (144, 244, 245) имеет относительно низкую или нулевую видимость в изображениях по сравнению с распознаваемым участком (42).
4. Устройство по п.1, в котором распознаваемый участок (42, 342, 442) является протяженным.
5. Устройство по п.4, в котором маркер дыхания (140, 240) дополнительно включает в себя один из
удлиненного прокладочного участка (144), отделяющего удлиненный распознаваемый участок (42, 342) от субъекта (18) формирования изображения, и
совокупности прокладочных участков (244, 245), которые разнесены или распределены вдоль удлиненного распознаваемого участка (42) и которые отделяют удлиненный распознаваемый участок (42, 342) от субъекта (18) формирования изображения.
6. Устройство по п.4, в котором удлиненный распознаваемый участок (42, 342, 442) выполнен из материала, включающего в себя одно или более из дерева, пластика, плотной пены, воды и радиоактивного вещества.
7. Устройство по п.4, в котором удлиненный распознаваемый участок включает в себя
совокупность распознаваемых участков (342), разнесенных вдоль оси (20) сканера и выполненных с возможностью независимого движения в соответствии с дыханием субъекта (18) формирования изображения.
8. Устройство по п.4, в котором удлиненный распознаваемый участок включает в себя удлиненный стержень (42).
9. Устройство по п.1, в котором распознаваемый участок (42, 342, 442) оперативно связан с дыханием субъекта (18) формирования изображения, благодаря чему распознаваемый участок способен перемещаться в соответствии с дыханием.
10. Устройство по п.9, в котором маркер (240) дыхания дополнительно включает в себя
оконтуренный участок (244, 245), контактирующий с участком субъекта (18) формирования изображения и имеющий контур (246, 247), выполненный таким образом, что он в целом соответствует контактному участку субъекта формирования изображения.
11. Устройство по п.1, в котором распознаваемый участок (442) является протяженным, и маркер (440) дыхания дополнительно включает в себя
шарнирное соединение (444) на конце удлиненного распознаваемого участка (442) с опорой (22) субъекта формирования изображения, которое поддерживает субъект (18) формирования изображения, и
соединение (446) субъекта, отстоящее от шарнирного соединения, причем соединение субъекта оперативно соединяет удлиненный распознаваемый участок с субъектом формирования изображения, благодаря чему удлиненный распознаваемый участок способен поворачиваться вокруг шарнирного соединения в соответствии с дыханием субъекта формирования изображения.
12. Устройство для организации изображений, полученных сканером (10) формирования изображения в разные моменты времени и в разных позициях вдоль оси (20) сканера, устройство содержит
маркер дыхания (40, 140, 240, 340, 440), включающий в себя удлиненный распознаваемый участок (42, 342, 442), оперативно связанный с дыханием субъекта формирования изображения, благодаря чему удлиненный распознаваемый участок способен перемещаться в соответствии с дыханием, причем удлиненный распознаваемый участок выполнен таким образом, что он пересекает изображения, полученные в разные моменты времени и в разных позициях вдоль оси сканера, и распознаваем как маркирующий признак в изображениях, и
блок (52, 54) нахождения позиции маркера, выполненный с возможностью определения позиции маркирующих признаков в изображениях, и
блок сортировки (60), выполненный с возможностью сортировки изображений по фазе дыхания на основании определенных позиций маркирующего признака.
13. Устройство по п.12, в котором сканер (10) формирования изображения представляет собой компьютерно-томографический сканер, и субъект (18) формирования изображения является человеческим субъектом формирования изображения, размещенным так, что полученные изображения являются двухмерными или тонкими трехмерными осевыми изображениями среза.
14. Устройство по п.12, в котором блок (52, 54) нахождения позиции маркера включает в себя
блок (52) сегментирования маркера, сегментирующий каждое полученное изображение для очерчивания маркирующего признака, и
блок (54) определения положения центра тяжести, определяющий положение центра (542а, 542b) тяжести очерченного маркирующего признака.
15. Устройство по п.12, в котором удлиненный распознаваемый участок (42, 342, 442) маркера (40, 140, 240, 340, 440) дыхания проходит по всей длине изображаемой области субъекта, благодаря чему маркирующий признак обеспечен в каждом изображении, полученном сканером (10) формирования изображения в разные моменты времени и в разных позициях вдоль оси (20) сканера.
16. Способ для организации изображений, полученных в разные моменты времени, с помощью маркера (40, 140, 240, 340, 440) дыхания, который может быть распознан как маркирующий признак в полученных изображениях, причем способ содержит этапы, на которых
определяют позицию маркирующего признака в выбранном полученном изображении,
назначают фазу дыхания для выбранного полученного изображения на основании определенной позиции маркирующего признака в выбранном полученном изображении и
повторяют операции определения и назначения для назначения фаз дыхания изображениям, полученным в разные моменты времени.
17. Способ по п.16, в котором маркер (40, 140, 240, 340, 440) дыхания включает в себя удлиненный распознаваемый участок (42, 342, 442), способ дополнительно включает в себя этапы, на которых
размещают удлиненный распознаваемый участок (42, 342, 442), в общем случае параллельно оси (20) сканера, благодаря чему удлиненный распознаваемый участок пересекает изображения, полученные в разных позициях вдоль оси сканера.
18. Способ по п.17, дополнительно включающий в себя этапы, на которых объединяют изображения, полученные в разные моменты времени и в разных позициях вдоль оси (20) сканера и имеющие, по существу, одну и ту же назначенную фазу дыхания, для формирования представления в виде объемного изображения фазы дыхания.
19. Способ по п.16, дополнительно включающий в себя этапы, на которых объединяют изображения, полученные в разные моменты времени и имеющие разные назначенные фазы дыхания, для формирования изменяющейся во времени последовательности дыхания.
20. Способ по п.16, в котором на этапе определения
сегментируют выбранное изображение для очерчивания маркирующего признака и
определяют положение центра (542a, 542b) тяжести очерченного маркирующего признака.
21. Цифровой носитель, на котором хранятся процессорно-выполняемые инструкции для осуществления способа по п.16.
| US 4838265 A, 13.06.1989 | |||
| US 4860331 A, 22.08.1989 | |||
| US 3547121 A, 15.12.1970 | |||
| US 5469847 A, 28.11.1995 | |||
| US 20050119560 A1, 02.06.2005 | |||
| US 6937255 B2, 30.08.2005 | |||
| US 2006291621 A1, 28.12.2006 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ЛЕЧЕНИЯ РАКА ЛЕГКИХ | 1991 |
|
RU2114430C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ТУЛОВИЩА ЧЕЛОВЕКА ВО ВРЕМЯ ХОДЬБЫ | 2002 |
|
RU2219836C1 |
| VEDAM S Ss et al: "Determining parameters for respiration-gated radiotherapy" MEDICAL PHISICS, | |||

