ПРИТЯЗАНИЕ НА ПРИОРИТЕТ
Данная заявка на патент претендует на привилегии приоритета предварительной заявки на патент № 62/090 115 Lachaine et al., озаглавленной «MAGNETIC RESONANCE PROJECTION IMAGING», поданной 10 декабря 2014 г. (дело патентного поверенного № 4186.006PRV), которая настоящим документом включена по ссылке во всей своей полноте.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Лучевая терапия или «радиотерапия» может использоваться для лечения рака или других болезней в ткани млекопитающих (например, человека и животного). Один такой метод радиотерапии упоминается как «гамма-нож», посредством которого пациент облучается с использованием нескольких гамма-лучей малой интенсивности, которые сходятся с высокой интенсивностью и высокой точностью на целевой области (например, опухоли). В другом примере, обеспечивается радиотерапия с использованием линейного ускорителя («linac»), посредством чего целевая область облучается частицами с высокой энергией (например, электронами, протонами, ионами, протонами высокой энергии и т.п.). Расположение и доза пучка излучения точно контролируется для обеспечения предписанной дозы облучения целевой области. Пучок для облучения также, как правило, контролируется с целью уменьшения или минимизации поражения окружающей здоровой ткани, такой, которая может упоминаться как «орган(-ы) риска» (OAR). Облучение может упоминаться как «предписанное», так как, как правило, врач назначает заданную дозу облучения для доставки на целевую область, такую как опухоль.
Как правило, ионизирующее излучение в виде коллимированного пучка направляется от внешнего источника излучения на пациента. Модуляция пучка излучения может обеспечиваться одним или более аттенюаторами или коллиматорами (например, многолепестковым коллиматором). Интенсивность и форма пучка излучения может регулироваться коллимированием, избегая поражения здоровой ткани (например, OAR) рядом с целевой тканью, приводя проецируемый пучок в соответствии с профилем целевой ткани.
Процедура планирования лечения может включать в себя использование трехмерного изображения пациента для идентификации целевой области (например, опухоли) и так, чтобы идентифицировать критические органы около опухоли. Создание плана лечения может представлять собой длительный процесс, где планировщик пытается соблюсти различные требования или ограничения лечения (например, требования гистограммы доза-объем (DVH) или другие ограничения), например, принимая во внимание важность (например, определение веса) соответствующих ограничений, чтобы получить план лечения, который является клинически приемлемым. Эта задача может представлять собой длительный процесс проб и ошибок, который усложняется различными органами риска (OAR), так как когда увеличивается количество OAR (например, около тринадцати для лечения головы и шеи), также увеличивается сложность процесса. OAR вдали от опухоли можно легче уберечь от облучения, но может быть труднее уберечь от облучения во время лечения OAR, которые находятся вблизи или перекрывают целевую опухоль.
Как правило, для каждого пациента первоначальный план лечения может создаваться «автономным» образом. План лечения может разрабатываться задолго до доставки лучевой терапии, например, используя один или более медицинских методов визуализации. Информация о визуализации может включать в себя, например, изображения рентгеновских лучей, компьютерной томографии (CT), ядерного магнитного резонанса (MR), позитронно-эмиссионной томографии (PET), однофотонной эмиссионной компьютерной томографии (SPECT) или ультразвука. Медицинский работник, такой как врач, может использовать информацию о трехмерной визуализации, указывающую анатомию пациента, для идентификации одной или более целевых опухолей вместе с органами риска около опухоли. Медицинский работник может выделить целевую опухоль, которая должна принять предписанную дозу облучения, используя ручной метод, и медицинский работник может аналогично выделить близлежащую ткань, такую как органы, с риском поражения от лечения облучением.
Альтернативно или дополнительно, автоматизированное инструментальное средство (например, ABAS, производимое компанией Elekta AB, Швеция) может использоваться для оказания содействия при идентификации или выделении целевой опухоли и органов риска. План лечения лучевой терапией («план лечения») затем может создаваться с использованием метода оптимизации на основе клинических и дозиметрических требований и ограничений (например, максимальные, минимальные и средние дозы облучения для опухоли и критических органов).
Процедура планирования лечения может включать в себя использование трехмерного изображения пациента для идентификации целевой области (например, опухоли) и для идентификации критических органов около опухоли. Создание плана лечения может представлять собой длительный процесс, где планировщик пытается соблюсти различные требования или ограничения лечения (например, требования гистограммы доза-объем (DVH)), принимая во внимание их индивидуальную важность (например, определение веса), чтобы получить план лечения, который клинически является приемлемым. Эта задача может представлять собой длительный процесс проб и ошибок, который усложняется различными органами риска (OAR), так как когда увеличивается количество OAR (например, до тринадцати для лечения головы и шеи), также увеличивается сложность процесса. OAR вдали от опухоли можно легко уберечь от облучения, тогда как может быть трудным уберечь OAR, которые находятся вблизи или перекрывают целевую опухоль.
План лечения затем может исполняться позже расположением пациента и доставкой предписанной лучевой терапии. План лечения лучевой терапией может включать в себя «фракционирование» дозы, посредством чего обеспечивается последовательность доставок лучевой терапии в течение заданного периода времени (например, 45 фракций или некоторое другое общее число фракций), например, каждая доставка терапии включает в себя заданную фракцию общей предписанной дозы. Во время лечения является важным положение пациента или положение целевой области относительно пучка для лечения, так как такое расположение, частично, определяет, облучается ли целевая область или здоровая ткань.
ОБЗОР
В одном подходе, визуализация методом ядерного магнитного резонанса (MR) может объединяться с системой лучевой терапии, например, для обеспечения информации о визуализации для адаптации или наведения лучевой терапии. Пример такой объединенной системы обычно может упоминаться как «MRI-linac», содержащий систему MR-визуализации вместе с линейным ускорителем в качестве источника энергии для лучевой терапии. В одном проиллюстративном примере получение изображения может выполняться как раз перед инициированием доставки заданной фракции лучевой терапии. Такая визуализация может обеспечивать информацию, полезную для идентификации положения целевой области или для идентификации движения целевой области. Такая одновременная визуализация может упоминаться в общем случае как «режим реального времени», но обычно существует запаздывание или временная задержка между получением изображения и доставкой лучевой терапии.
Изобретатели настоящего изобретения выяснили, помимо всего прочего, что существует проблема при использовании 3D MR-визуализации для планирования или адаптации лучевой терапии. Например, на реконструкцию объемной области изображения может оказываться неблагоприятное воздействие, когда на целевую область воздействует дыхание или другое движение, так как продолжительность визуализации («время визуализации») обычно достаточно длительное для воздействия таким движением. Кроме того, запаздывание получения или большая продолжительность получения может вызывать проблемы, так как целевая область может деформироваться или существенно перемещаться между получением 3D MR-изображения и последующей доставкой лучевой терапии.
В одном подходе, например, когда движение целевой области является периодическим, может использоваться метод четырехмерной MR-визуализации, например, перед лечением облучением. Например, получение изображения может синхронизироваться с физиологическим циклом, например, считыванием информации о заменителе. Примеры заменителей включают в себя сигнал, считываемый с использованием пояса для измерения дыхания, или одномерный (1D) эхо-сигнал навигатора, указываемый MR-визуализацией. Элементы MR-визуализации, такие как полученные срезы визуализации, могут группироваться в бины, используя информацию, указывающую фазу или амплитуду физиологического цикла или заменителя, коррелированного с таким циклом. Однако такой подход также может иметь ограничения. Например, общедоступные методы 4D-визуализации на основе срезов (такие как MR-визуализация без проекции) не включают в себя использование анатомического ориентира, такого как местоположение диафрагмы, для группировки или биннинга полученных 3D-изображений в отношении физиологического цикла. Вместо этого, обычно доступные методы 4D-визуализации получают изображения последовательно, а полученные изображения содержат разные участки анатомии и не имеют общих анатомических признаков на каждом изображении. В противоположность этому, подход проекционной визуализации может включать в себя выбор или генерирование проекционных изображений, имеющих общий анатомический признак в каждом изображении, поэтому общий признак может использоваться для облегчения биннинга. Даже если присутствует другой ракурс признака в каждом из проекционных изображений (например, разные виды признака), такое отслеживание признака для биннинга все же может использоваться в подходе проекционной визуализации. Таким образом, в отличие от общедоступных методов 4D MR-визуализации заменитель (такой как внешний заменитель) не требуется.
Общепринятые протоколы 4D MR-визуализации также включают в себя относительно продолжительные времена получения и могут быть недопустимыми по времени, например, в применениях, где должна выполняться визуализация с обновлением перед каждой фракцией лечения лучевой терапией. Также, методы 4D MR-визуализации необязательно могут представлять или предсказывать анатомическое состояние визуализируемого субъекта во время последующей доставки лучевой терапии. Например, может иметь место дрейф базовой линии, деформации или изменения частоты или фазы физиологического цикла между моментом времени, при котором получается информация 4D MR-визуализации, и последующей доставкой лучевой терапии.
В другом подходе, информация о визуализации, указывающая внутрифракционное движение целевой области или других участков визуализируемого субъекта, может включать в себя визуализацию только участка визуализируемого субъекта без необходимости визуализации полного объема, например, получением двумерных (2D) срезов визуализации, например, через целевую область по разным направлениям (например, включая получение последовательности ортогональных срезов). Такие срезы могут использоваться для того, чтобы способствовать локализации целевой области или другой анатомии, как правило, для доставки лучевой терапии. Такой локализации может способствовать, частично, использование одного или более из методов сегментирования изображения или регистрации изображений. Однако такой подход также может иметь ограничения. Например, последовательности импульсов MR-визуализации, используемые для получения 2D-срезов, могут отличаться от тех, которые используются для получения межфракционной объемного «опорной» 3D- или 4D-визуализации перед лечением. Такие разные последовательности импульсов могут делать проблемным регистрацию между 2D-срезами и ранее полученным объемным опорным изображением. Другим ограничением является то, что теряется информация вне среза, например, в примере, где присутствует многочисленные органы риска (OAR), или, если должны быть выполнены ретроспективные вычисления дозы посредством получения информации о визуализации во время лечения. Еще другим ограничением использования 2D-срезов визуализации является то, что может быть трудным выставление срезов с движением цели, особенно, если движение изменяется между физиологическими циклами, например, между дыхательными циклами. Малые цели, такие как опухоли, могут деформироваться или могут исчезать полностью из конкретного полученного среза визуализации.
Изобретатели настоящего изобретения нашли решение для вышеупомянутых ограничений. Такое решение может включать в себя использование подхода проекционной MR-визуализации. Такой подход проекционной визуализации может использоваться в пределах фракции. Альтернативно или дополнительно, проекционная MR-визуализация может использоваться аналогично для моделирования визуализации, подлежащей использованию для планирования лечения, или визуализации перед лечением (например, «опорной»), выполняемой между фракциями для сдвига пациента или адаптации плана лечения перед доставкой лечения. Использование проекционной MR-визуализации для моделирования визуализации, опорной визуализации перед лечением и последующей визуализации в пределах фракции может обеспечивать согласованность и легкость регистрации или другой обработки. Проекционная MR-визуализация также может обеспечивать информацию о визуализации таким образом, который более точно коррелирует с методами портальной визуализации со стороны пучка (BEV) или с рентгеновскими методами, но без подвергания визуализируемого субъекта ионизирующему облучению во время визуализации. Получение проекционных 2D MR-изображений может существенно уменьшить время ожидания получения визуализации по сравнению с другими подходами, такими как полнообъемная 3D MR-визуализация, а проекционные 2D-изображения могут объединяться так, чтобы получать информацию об объемной визуализации, используя, например, томографирование или методы пространства Фурье (k-пространства). Информация из полученных проекционных 2D MR-изображений или из 3D- или 4D-визуализаций, построенных из проекционных 2D MR-изображений, может сравниваться с информацией об опорной визуализации, например, для локализации целевой области или анатомических ориентиров, или для предсказания последующего положения целевой области. Таким образом, информация, указывающая целевую область, может использоваться для адаптации лучевой терапии.
Согласно различным примерам аппарат и методы, описанные в данном документе, могут использоваться для управления доставкой лучевой терапии к субъекту с использованием методов проекционной визуализации. Например, опорная визуализация может быть принята такой, что включает информацию о визуализации, полученной раннее в отношении планирования лечения лучевой терапией. Проекционное двумерное (2D) изображение может генерироваться с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR), причем проекционное 2D-изображение соответствует заданному проекционному направлению, заданное проекционное направление включает в себя траекторию, пересекающую по меньшей мере часть визуализируемого субъекта. Может определяться изменение между сгенерированным проекционным 2D-изображением и информацией об опорной визуализации. Доставка лучевой терапии может управляться по меньшей мере частично (например, адаптивным образом) с использованием определенного изменения между полученным проекционным 2D-изображением и информацией об опорной визуализации.
Изобретатели настоящего изобретения также выяснили, что информация об опорной визуализации может быть получена с использованием методов проекционной визуализации, например, для использования при пространственной регистрации получаемых позже проекционных изображений с ранее полученной информацией о визуализации. Согласно различным примерам аппарат и методы, описанные в данном документе, могут использоваться для генерирования информации о четырехмерной (4D) и другой визуализации, например, во время одного или более из получения опорных изображений перед лучевой терапией (например, опорная визуализации) или позже, например, перед или во время доставки лучевой терапии (например, внутрифракционная визуализация). Генерирование информации о 4D-визуализации может включать в себя генерирование двух или более двумерных (2D) изображений, причем 2D-изображения содержат проекционные изображения, представляющие разные проекционные углы, где 2D-изображения генерируются с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR). Конкретные 2D-изображения могут назначаться бинам, по меньшей мере частично используя информацию, указывающую временные положения внутри физиологического цикла, соответствующие конкретным 2D-изображениям. Трехмерные (3D) изображения могут составляться с использованием 2D-изображений в бинах. Группа из 3D-изображений может объединяться, чтобы получать информацию о 4D-визуализации.
Этот обзор предназначен для предоставления обзора объекта изобретения по настоящей заявке на патент. Он не предназначен для предоставления всеобъемлющего или исчерпывающего объяснения изобретения. Подробное описание включено для того, чтобы предоставить дополнительную информацию о настоящей заявке на патент.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1A иллюстрирует в общих чертах пример системы лучевой терапии, которая может включать в себя блок вывода лучевой терапии, выполненный с возможностью обеспечения пучка для терапии.
Фиг.1B иллюстрирует в общих чертах вид с частичным разрезом примера системы, которая включает в себя объединенную систему лучевой терапии и систему визуализации методом ядерного магнитного резонанса (MR).
Фиг.2 иллюстрирует в общих чертах пример конфигурации коллиматора, такую, которая может использоваться, частично, для придания формы или коллимирования пучка для лучевой терапии.
Фиг.3 иллюстрирует в общих чертах пример системы лучевой терапии, такой, которая может включать в себя устройство лучевой терапии и устройство получения изображения.
Фиг.4 иллюстрирует в общих чертах пример системы, которая может использоваться для одного или более из получения изображения, сегментирования изображения, предсказания цели, управления терапией или регулировки терапии.
Фиг.5 иллюстрирует в общих чертах пример системы, которая, например, может включать в себя контроллер лучевой терапии, имеющий блок ввода визуализации, генератор лучевой терапии и блок вывода лучевой терапии.
Фиг.6 иллюстрирует в общих чертах метод, такой как способ, который может включать в себя использование MR-визуализации для возбуждения области визуализируемого субъекта, причем область определяет срез визуализации, и получение значения пикселя, соответствующего одномерной проекционной линии через срез.
Фиг.7A иллюстрирует в общих чертах метод, такой как способ, который может включать в себя возбуждение области визуализируемого субъекта с использованием последовательности возбуждения двумерной (2D) MR-визуализации.
Фиг.7B иллюстрирует в общих чертах другой метод, такой как способ, который может включать в себя возбуждение области визуализируемого субъекта с использованием последовательности возбуждения двумерной (2D) MR-визуализации.
Фиг.8A и 8B иллюстрируют в общих чертах метод, такой как способ, который может включать в себя генерирование проекционных двумерных (2D) MR-изображений, представляющих разные проекционные углы, и использование таких проекционных 2D-изображения для составления трехмерных (3D) изображений.
Фиг.9 иллюстрирует в общих чертах метод, такой как способ, который может включать в себя генерирование проекционного двумерного (2D) изображения с использованием MR-визуализации и определение изменения между сгенерированным проекционным 2D-изображением и информацией об опорной визуализации.
Фиг.10A иллюстрирует в общих чертах пространственное расположение ориентации пучка для лучевой терапии относительно одного или более проекционных направлений, которые, например, могут включать в себя два проекционных направления, ориентированные ортогонально друг к другу.
Фиг.10B иллюстрирует в общих чертах пространственное расположение проекционных направлений MR-визуализации, например, соответствующих проекционным углам, охватывающим дугу или окружность вокруг заданной области, такой как изоцентр лечения лучевой терапией.
Фиг.10C иллюстрирует, в общих чертах, пространственное расположение проекционного направления MR-визуализации, такого как ориентированного под заданным углом относительно направления пучка для лучевой терапии.
Фиг.10D иллюстрирует в общих чертах пространственное расположение проекционных направлений MR-визуализации, которые могут задаваться для получения проекционных MR-изображений, подобно стереоскопической рентгеновской визуализации.
На чертежах, которые необязательно выполнены в масштабе, подобные позиции могут описывать подобные компоненты на разных видах. Подобные позиции, имеющие разные буквенные подстрочные индексы, могут представлять разные экземпляры подобных компонентов. Чертежи иллюстрируют в общих чертах и в качестве примера, но не в качестве ограничения, различные варианты осуществления, описанные в настоящем документе.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг.1A иллюстрирует в общих чертах пример системы 102 лучевой терапии, которая может включать в себя блок 104 вывода лучевой терапии, выполненный с возможностью обеспечения пучка 108 для терапии. Блок 104 вывода лучевой терапии может включать в себя один или более аттенюаторов или коллиматоров, такой как многолепестковый коллиматор (MLC), описанный в иллюстративном примере на фиг.2. Ссылаясь снова на фиг.1A, пациент может располагаться в области 112, например, на платформе 116 (например, на столе или кушетке) для приема предписанной дозы лучевой терапии согласно плану лечения лучевой терапией.
Блок 104 вывода лучевой терапии может располагаться на гентри 106 или другой механической опоре, например, для вращения блока 104 вывода терапии вокруг оси («A»). Одно или более из платформы 116 или блока 104 вывода лучевой терапии может перемещаться в другие местоположения, например, может перемещаться в поперечном направлении («T») или в боковом направлении («L»). Возможны другие степени свободы, такие как поворот вокруг одной или более других осей, такой как поворот вокруг поперечной оси (указан как «R»).
Система координат (включающая оси A, T и L), показанная на фиг.1A, может иметь начало отсчета, расположенное в изоцентре 110. Изоцентр может определяться как местоположение, где пучок 108 для лучевой терапии пересекает начало отсчета оси координат, например, для доставки предписанной дозы облучения в местоположение на или внутри пациента. Например, изоцентр 110 может определяться как местоположение, где пучок 108 для лучевой терапии пересекает пациента для различных угловых положений блока 104 вывода лучевой терапии, располагаемого посредством гентри 106, вокруг оси A.
В одном примере, детектор 114 может располагаться внутри поля пучка 108 для терапии, например, может включать в себя детектор с плоской панелью (например, детектор прямого отсчета или сцинтилляционный детектор). Детектор 114 может быть установлен на гентри 106 напротив блока 104 вывода лучевой терапии, так чтобы поддерживать выставление с пучком 108 для терапии во время вращения гентри 106. Таким образом, детектор 114 может использоваться для мониторинга пучка 108 для терапии, или детектор 114 может использоваться для визуализации, например, портальной визуализация проекции пучка 108 через область 112. Область 112 может определять плоскость, а проекция пучка 108 для терапии в области 112 может упоминаться как «проекция со стороны пучка» области 112.
В иллюстративном примере, может автоматически располагаться одно или более из платформы 116, блока 104 вывода терапии или гентри 106, и блок 104 вывода терапии может устанавливать пучок 108 для терапии в соответствии с заданной дозой для конкретного случая доставки терапии. Последовательность доставок терапии может задаваться в соответствии с планом лечения лучевой терапией, например, используя одну или более разных ориентаций или местоположение гентри 106, платформы 116 или блока 104 вывода терапии. Доставки терапии могут происходить последовательно, но могут пересекаться в требуемой целевой области на или внутри пациента, например, в изоцентре 110. Предписанная суммарная доза лучевой терапии, таким образом, может доставляться на целевую область, в тоже время уменьшается или исключается поражение ткани около целевой области, такой как один или более органов риска.
Как упомянуто в отношении других примеров в данном документе, система 102 лучевой терапии может включать в себя или может быть связана с системой получения изображения, так чтобы обеспечивать одно или более из визуализации методом ядерного магнитного резонанса (MR) или рентгеновской визуализации, например, может включать в себя визуализацию методом компьютерной томографии (CT). В одном примере, информация о MR-визуализации или другая информация о визуализации может использоваться для создания информации о визуализации или визуализаций, эквивалентных CT-визуализации без необходимости в фактической CT-визуализации. Такая визуализация может упоминаться как «псевдо-CT» визуализация.
Фиг.1B иллюстрирует в общих чертах вид с частичным разрезом примера системы, которая включает в себя объединенную систему 102 лучевой терапии и систему 130 визуализации методом ядерного магнитного резонанса (MR). Система 130 MR-визуализации может быть выполнена с возможностью образования «отверстия» вокруг оси («A»), и система лучевой терапии может включать в себя блок 104 вывода лучевой терапии, например, для обеспечения пучка 108 для лучевой терапии, направленного на изоцентр 110 в отверстии вдоль оси A. Блок 104 вывода лучевой терапии может включать в себя коллиматор 124, например, для одного или более из управления или придания формы пучку 108 для лучевой терапии для направления пучка 108 на целевую область внутри пациента. Пациент может поддерживаться платформой, такой как платформа, располагаемая вдоль одной или более из осевого направления A, бокового направления L или поперечного направления T. Одна или более частей системы 102 лучевой терапии могут устанавливаться на гентри 106, например, для вращения блока 104 вывода лучевой терапии вокруг оси A.
Фиг.1A и 1B иллюстрируют, в общих чертах, примеры, включающие в себя конфигурацию, в которой блок вывода терапии может вращаться вокруг центральной оси (например, оси «A»). Могут использоваться другие конфигурации блока вывода лучевой терапии. Например, блок вывода лучевой терапии может быть установлен на роботизированной руке или манипуляторе, так чтобы иметь многочисленные степени свободы. В еще другом примере блок вывода терапии может быть стационарным, например, расположенным в области, отделенной в боковом направлении от пациента, а платформа, поддерживающая пациента, может использоваться для выставления изоцентра лучевой терапии с заданной целевой областью внутри пациента.
Фиг.2 иллюстрирует, в общих чертах, пример конфигурации 132 многолепесткового коллиматора (MLC), который может использоваться частично для придания формы или коллимирования пучка для лучевой терапии. На фиг.2, лепестки 132A-132J могут автоматически располагаться так, чтобы определять апертуру, аппроксимирующую сечение или проекцию опухоли 140. Лепестки 132A-132J могут быть выполнены из материала, предусмотренного для ослабления или блокирования пучка для облучения в областях, кроме апертуры, в соответствии с планом лечения облучением. Например, лепестки 132A-132J могут включать в себя металлические пластины, например, содержащие вольфрам, причем продольная ось пластин ориентирована параллельно направлению пучка, а их концы ориентированы ортогонально направлению пучка (как показано на плоскости иллюстрации фиг.2).
«Состояние» MLC 132 может адаптивно регулироваться в ходе лучевой терапии, чтобы устанавливать пучок для терапии, который лучше аппроксимирует форму или местоположение опухоли 140 или другой целевой области, по сравнению с использованием статической конфигурации коллиматора или по сравнению с использованием конфигурации MLC 132, определяемой исключительно для использования метода «автономного» планирования терапии. Метод лучевой терапии, включающий в себя использование MLC 132 для получения заданного распределения дозы облучения на опухоль или на заданные области в опухоли, может упоминаться как лучевая терапия с модулированной интенсивностью (IMRT). Как описано в отношении других примеров в данном документе, визуализация может выполняться для локализации целевой области или для определения или предсказания ракурса целевой области из точки обзора пучка для лучевой терапии, чтобы адаптивно управлять терапией.
Фиг.3 иллюстрирует в общих чертах пример системы 300 лучевой терапии, которая, например, может включать в себя устройство 330 лучевой терапии и устройство получения изображения. Система 300 лучевой терапии может включать в себя модуль 312 обучения, модуль 314 предсказания, базу 322 данных обучения, базу 324 данных тестирования, устройство 330 лучевой терапии и устройство 350 получения изображения. Система 300 лучевой терапии также может быть подсоединена к системе 342 планирования лечения (TPS) и онкологической информационной системе (OIS) 344, которая может предоставлять информацию о пациенте. Кроме того, система 300 лучевой терапии может включать в себя устройство отображения и пользовательский интерфейс.
Фиг.4 иллюстрирует в общих чертах пример системы 400, которая может использоваться для одного или более из получения изображения, сегментирования изображения, предсказания цели, управления терапией или регулировки терапии. Согласно некоторым вариантам осуществления, система 400 может представлять собой одно или более высокопроизводительных вычислительных устройств, способных идентифицировать, анализировать, поддерживать, генерировать или предоставлять большие количества данных, совместимых с описанными вариантами осуществления. Система 400 может быть автономной, или она может быть частью подсистемы, которая, в свою очередь, может быть частью большей системы. Например, система 400 может представлять распределенные высокопроизводительные серверы, которые расположены удаленно и выполняют связь по сети, такой как Интернет, или сеть связи с выделенными каналами, такая как локальная сеть (LAN) или глобальная сеть (WAN). В некоторых вариантах осуществления, система 400 может включать в себя встроенную систему, формирующий изображения сканер (например, сканер на основе ядерного магнитного резонанса (MR) или другой сканер, такой как сканер компьютерной томографии (CT)), и/или устройство отображения с сенсорным экраном на связи с одним или более удаленно расположенными высокопроизводительными вычислительными устройствами.
В одном варианте осуществления, система 400 может включать в себя один или более процессоров 414, одну или более памятей 410 и один или более интерфейсов 415 связи. Процессорами 414 могут быть процессорная схема, включающая в себя один или более устройств обработки общего назначения, таких как микропроцессор, блок центральной обработки (CPU), блок обработки графики (GPU) или т.п. Более конкретно, процессором 414 может быть микропроцессор со сложным набором команд (CISC), микропроцессор с сокращенным набором команд (RISC), микропроцессор со сверхдлинным командным словом (VLIW), процессор, реализующий другие наборы команд, или процессоры, реализующие комбинацию наборов команд.
Процессором 414 также может быть одно или более устройств обработки специального назначения, таких как специализированная интегральная схема (ASIC), программируемая вентильная матрица (FPGA), процессор цифровой обработки сигналов (DSP), система на кристалле (SoC) или т.п. Как понятно для специалиста в данной области техники, в некоторых вариантах осуществления процессором 414 может быть процессор специального назначения, а не процессор общего назначения. Процессор 414 может включать в себя одно или более известных устройств обработки, таких как микропроцессор из семейства Pentium™ или Xeon™, производимый компанией Intel™, из семейства Turion™, производимый компанией AMD™, или любой из различных процессоров, производимых другими изготовителя, такими как Oracle™ (например, процессор с архитектурой SPARC™). Процессор 414 также может включать в себя блоки обработки графики, производимые компанией Nvidia™. Раскрытые варианты осуществления не ограничиваются каким-либо типом процессора(-ов), сконфигурированного(-ых) иным образом для удовлетворения вычислительных требований идентификации, анализа, поддержки, генерирования и/или предоставления больших количеств данных визуализации или любых других типов данных, совместимых с раскрытыми вариантами осуществления.
Память 410 может включать в себя одно или более запоминающих устройств, выполненных с возможностью хранения исполняемых компьютером инструкций, используемых процессором 414 для выполнения функций, относящихся к раскрытым вариантам осуществления. Например, память 410 может хранить инструкции исполняемого компьютером программного обеспечения для программного обеспечения 411 планирования лечения, программное обеспечение 412 операционной системы и программное обеспечение 413 обучения/предсказания. Процессор 414 может быть связан с возможностью выполнения связи с памятью/запоминающим устройством 410 и процессор 414 может быть выполнен с возможностью исполнения исполняемых компьютером инструкций, хранимых на нем для выполнения одной или более операций, совместимых с раскрытыми вариантами осуществления. Например, процессор 414 может исполнять программное обеспечение 413 обучения/предсказания для реализации функциональных возможностей модуля 312 обучения и модуля 314 предсказания. Кроме того, процессорное устройство 414 может исполнять программное обеспечение 411 планирования лечения (например, такое как Monaco©, предоставляемое компанией Elekta), которое может выполнять сопряжение с программным обеспечением 413 обучения/предсказания.
Раскрытые варианты осуществления не ограничиваются отдельными программами или компьютерами, выполненными с возможностью выполнения специализированных задач. Например, память 410 может включать в себя единственную программу, которая выполняет функции системы 400, или многочисленные программы (например, программное обеспечение 411 планирования лечения и/или программное обеспечение 413 обучения/планирования). Кроме того, процессор 414 может исполнять одну или более программ, расположенных удаленно от системы 400, таких как программы, хранимые в базе 420 данных, причем такие удаленные программы могут включать в себя программное обеспечение онкологической информационной системы или программное обеспечение планирования лечения. Память 410 также может хранить данные изображения или данные/информацию любого другого типа в любом формате, которые система может использовать для выполнения операций, совместимых с раскрытыми вариантами осуществления.
Интерфейсом 415 связи может быть одно или более устройств, выполненных с возможностью приема и/или передачи данных системой 400. Интерфейс 415 связи может включать в себя одно или более устройств цифровой и/или аналоговой связи, которые позволяют системе 400 выполнять связь с другими машинами и устройствами, такими как удаленно расположенные компоненты системы 400, базы 420 данных или базы 430 данных больницы. Например, процессор 414 может быть связан с возможностью выполнения связи с базой(-ами) 420 данных или базой(-ами) 430 данных больницы посредством интерфейса 415 связи. Например, интерфейсом 415 связи может быть компьютерная сеть, такая как Интернет, или сеть связи с выделенными каналами, такая как LAN или WAN. Альтернативно, интерфейсом 415 связи может быть линия спутниковой связи или линия цифровой или аналоговой связи любого вида, которая позволяет процессору 414 посылать/принимать данные на/от любой базы (баз) 420, 430 данных.
База(-ы) 420 данных и база(-ы) 430 данных больницы могут включать в себя одно или более устройств памяти, которые хранят информацию и к которым обращается и которыми управляет система 400. В качестве примера, база(-ы) 420 данных, база(-ы) 530 данных больницы или обе могут включать в себя реляционные базы данных, такие базы данных Oracle™, базы данных Sybase™ или другие, и могут включать в себя нереляционные базы данных, такие как файлы последовательности Hadoop, Hbase, Cassandra или другие. Базы данных или другие файлы могут включать в себя, например, одно или более из необработанных данных из MR-сканов или CT-сканов, связанных с визуализируемым субъектом, например, для обучения или предоставления опорного изображения, векторов признаков MR, информации о проекционной MR-визуализации, значений CT, векторов признаков пониженной размерности, модели(-ей) предсказания псевдо-CT, значения(-ий) псевдо-CT, изображения псевдо-CT, данных стандарта формирования, передачи и хранения медицинских изображений (DICOM) и т.д. Системы и способы раскрытых вариантов осуществления, однако, не ограничиваются отдельными базами данных. В одном аспекте, система 400 может включать в себя базу(-ы) 420 данных или базу(-ы) 430 данных больницы. Альтернативно, база(-ы) 420 данных и/или база(-ы) 430 данных больницы могут располагаться удаленно от системы 400. База(-ы) 420 данных и база(-ы) 430 данных больницы могут включать в себя вычислительные компоненты (например, систему управления базой данных, сервер базы данных и т.д.), выполненные с возможностью приема и обработки запросов на данные, хранимые в устройствах памяти базы (баз) 420 данных или базы (баз) 430 данных больницы, и предоставления данных из базы (баз) 420 данных или базы (баз) 430 данных больницы.
Система 400 может выполнять связь с другими устройствами и компонентами системы 400 по сети (не показана). Сеть может быть сетью любого типа (включая инфраструктуру), которая обеспечивает связь, обмен информацией или способствует обмену информации и позволяет посылать и принимать информацию между другими устройствами и/или компонентами системы 400 по сети (не показана). В других вариантах осуществления один или более компонентов системы 400 могут выполнять связь непосредственно по выделенной(-ым) линии(-ям) связи, таким как линия связи (например, проводная линия связи, беспроводная линия связи или спутниковая линия связи, или другая линия связи) между системой 400 и базой(-ами) 420 данных и базой(-ами) 430 данных больницы.
Конфигурация и границы функциональных стандартных блоков системы 400 были определены в данном документе для удобства описания. Альтернативные границы могут определяться, если только соответствующим образом выполняются заданные функции и их взаимосвязи. Альтернативы (включая эквиваленты, расширения, варианты, отклонения и т.д. тех, которые описаны в данном документе) очевидны для специалиста в соответствующей области(-ях) техники, основываясь на идеях, содержащихся в данном документе.
Фиг.5 иллюстрирует в общих чертах пример системы 500, которая, например, может включать в себя систему 554 контроллера лучевой терапии, имеющую блок 560 ввода визуализации, генератор 556 лучевой терапии и блок 504 вывода лучевой терапии. Генератор 556 терапии может включать в себя ускоритель, такой как линейный ускоритель, или другой источник облучения, а блок 504 вывода терапии может быть связан с генератором 556 терапии для обработки пучка энергетических фотонов или частиц, обеспечиваемых генератором 556 терапии. Например, блок 504 вывода терапии может включать в себя или может быть соединен с исполнительным механизмом 566 блока вывода для одного или более из поворота или перемещения блока 504 вывода терапии для обеспечения пучка для лучевой терапии, направляемого в требуемую целевую область. Блок 504 вывода терапии может включать в себя коллиматор 564, такой как многолепестковый коллиматор, как упомянуто выше в отношении фиг.2. Ссылаясь снова на фиг.5, система 554 контроллера терапии может быть выполнена с возможностью управления одним или более из генератора 556 терапии, блока 504 вывода терапии или исполнительного механизма 516 положения пациента (такого как подвижная платформа, включающая в себя кушетку или стол), используя адаптивный метод лечения облучением, как описано в других примерах в данном документе.
Система 554 контроллера терапии может быть соединена с одним или более датчиками, например, используя блок 562 ввода датчика. Например, датчик 558 пациента может предоставлять физиологическую информацию для системы контроллера терапии, такую как информация, указывающая одно или более из дыхания (например, используя плетизмографический датчик или пояс измерения дыхания), сердечной механической или электрической деятельности пациента, деятельности периферического кровообращения, положения пациента или движения пациента. Такая информация может обеспечивать «заменитель», коррелированный с движением одного или более органов или других областей, выбираемых целью блоком 504 вывода терапии. Такая информация может использоваться для управления терапией, например, для выбора терапии или содействия при «биннинге» полученной информации о визуализации в соответствии с одним или более из определенного диапазона фазы или амплитуды физиологического цикла, как указывается полученной информацией от датчика 558.
Блок 560 ввода визуализации может быть соединен с системой 550 визуализации (например, может включать в себя систему визуализации компьютерной томографии или систему визуализации методом ядерного магнитного резонанса (MR), в качестве иллюстративных примеров). Альтернативно или дополнительно, система 554 контроллера терапии может принимать информацию о визуализации от хранилища 552 данных визуализации, такого как централизованная база данных визуализации или сервера визуализации. Одна или более из системы 554 контроллера терапии или системы 550 визуализации может включать в себя элементы, показанные и описанные в отношении системы 400, показанной на фиг.4.
Широкодоступное оборудование лучевой терапии может использоваться для получения проекционных изображений, используя методы рентгеновской визуализации. Например, системы линейного ускорителя (linac) могут получать рентгеновские проекционные изображения, используя одно или более из самого мегавольтного (MV) пучка для лечения, объединенного с устройством портальной визуализации (такого как показанное иллюстративно на фиг.1A), или используя один или более отдельных киловольтных (kV) источников рентгеновского излучения. В примере, kV-источник рентгеновского излучения может быть установлен на гентри, например, ориентирован под углом 90 градусов относительно ориентации пучка для лечения. В другом примере, две независимые пары источника рентгеновского излучения/формирователя изображения могут располагаться для обеспечения стереоскопической рентгеновской визуализации. Проекционные изображения, полученные с использованием рентгеновской визуализации, представляют расходящуюся траекторию рентгеновского излучения от источника для визуализации, который может упоминаться как «точечный источник» или фокальная точка.
Перед доставкой лучевой терапии, например, перед конкретной фракцией лечения лучевой терапией, могут быть получены рентгеновские изображения компьютерной томографии (CT). Например, может использоваться метод CT-визуализации с коническим пучком (CBCT) для получения проекционных изображений под различными проекционными углами во время вращения установленного на гентри источника рентгеновского излучения вокруг визуализируемого субъекта. Трехмерное (3D) изображение может быть реконструировано из таких проекций конического пучка. Для визуализируемых субъектов, которые проявляют существенное движение, например, дыхательное движение, 3D-изображения CBCT могут быть размытыми, так как каждая проекция может захватывать снимок пациента в разные моменты дыхательного цикла или другого физиологического цикла. Чтобы уменьшить размытие от движения, может использоваться четырехмерная (4D) визуализация CBCT, например, посредством биннинга проекций в соответствии с фазой или амплитудой физиологического цикла, соответствующего моменту времени, при котором было получено проекционное изображение.
Изобретатели настоящего изобретения выяснили, помимо всего прочего, что проекции визуализации методом ядерного магнитного резонанса (MR) могут быть получены и обработаны подобным образом, например, уменьшая экспонирование визуализируемого субъекта ионизирующему излучению и обеспечивая увеличенный контраст мягких тканей по сравнению с подходами визуализации на основе рентгеновского излучения. Изобретатели настоящего изобретения также выяснили, помимо всего прочего, что проекционные MR-изображения не деградируют от рассеянного излучения, а направление проекционной визуализации не ограничивается физическими ограничениями, такими как необходимость ориентирования под 90 градусов относительно пучка для лечения. Проекционная MR-визуализации может использоваться для получения единственного ракурса визуализации (например, проекционного 2D-изображения) из всей информации, содержащейся в пределах простирания в глубину возбужденной области визуализации, в противоположность использованию относительно тонких 2D-срезов MR- визуализации, которые захватывают только часть информации в направлении глубины. Проекционная MR-визуализация не имеет ограничений, так что эта информация в полученном проекционном 2D-изображении не локализуется в направлении глубины, ортогональном плоскости проекционной визуализации, и структуры, окружающие целевую область, по-видимому, могут частично маскировать его.
Проекционная MR-визуализация, например, с использованием проекционных 1D-линии
Фиг.6 иллюстрирует в общих чертах метод 600, такой как способ, который может включать в себя на этапе 602 использование MR-визуализации для возбуждения области визуализируемого субъекта. Например, может использоваться двумерная (2D) последовательность возбуждения. На этапе 604 к визуализируемому субъекту может применяться градиент считывания, и может быть получена одномерная (1D) проекционная линия (например, «луч») через возбужденную 2D-область. На этапе 606 может быть выбрана другая ось проекционной линии, и 2D-область снова возбуждается на этапе 602, и градиент считывания применяется на этапе 604 в соответствии обновленной осью проекционной линии. Ссылаясь на диаграммы вставки на этапе 606, проекционные линии могут устанавливаться расходящимися или параллельными. Например, если используются расходящиеся ориентации проекционных линий, результирующее проекционное изображение, определяемое в плоскости 670A, может обеспечивать представление проекции, которое подобно проекционным изображениям, создаваемым методами визуализации расходящимся рентгеновским излучением, или подобно проекционному изображению, создаваемому пучком блока вывода лучевой терапии во время портальной визуализации. Таким образом, проекционная MR-визуализация может использоваться для моделирования рентгеновской визуализации, но с увеличенным контрастом и без нежелательного рассеяния, например.
В примере расходящихся проекционных MR-визуализаций с использованием проекционных 1D-линии может задаваться схождение проекционных 1D-линий в местоположении 650, например, соответствующем местоположению источника пучка для лучевой терапии или соответствующем местоположению, где обычно находится источник для рентгеновской визуализации. Масштаб и пространственное разрешение информации, определяемой в результирующем проекционном 2D-изображении, устанавливаемом в плоскости 670A, могут определяться расстоянием между местоположением 650 источника и местоположением выбранной плоскости 670A визуализации. Например, ориентация 660A первой проекционной линии может быть ортогональна плоскости 670A проекционной визуализации, а соответствующая полученная проекционная 1D-линия может использоваться для установления значения пикселя в местоположении 680A. Вся информация, получаемая вдоль первой проекционной линии, в основном, включается и сжимается в значение пикселя, таким образом, теряется селективность по глубине в направлении по проекционной линии.
Ориентация 660A линии, ортогональной плоскости 670A проекционной визуализации, в основном, может упоминаться как проекционное «направление» или «угол», даже если в расходящихся примерах не являются параллельными ориентации других проекционных линий. Ориентация 662A второй проекционной линии аналогичным образом может устанавливать значение второго пикселя в местоположении 682A, а ориентация 664A третьей проекционной линии аналогично может устанавливать значение третьего пикселя в местоположении 684A. В реконструированном изображении местоположения 680A, 682B и 684B пикселя определяются по меньшей мере частично заданным разнесением между местоположением плоскости 670A и местоположением 650 источника. Для достижения более высокого пространственного разрешения в боковом направлении в плоскости 670A, может быть получено большее количество отдельных направлений проекционных 1D-линий за счет общей продолжительности получения проекционного 2D-изображения, так как конкретные полученные 1D-проекции объединяются для создания полной 2D-проекции в плоскости 670A.
В примере параллельных проекционных 1D-линий, например, на этапе 606, ориентация 660B первой проекционной линии может устанавливаться для получения значения первого пикселя в местоположении 680B в результирующем проекционном изображении, определяемом в плоскости 670B. Другие параллельные линии 662B и 664B могут использоваться для обеспечения информации для соответствующих местоположений 682B и 684B в проекционном изображении. В качестве практической рекомендации, если используются исключительно параллельные проекционные 1D-линии для построения конкретного проекционного 2D-изображения, методы по фиг.7A или фиг.7B могут обеспечивать повышенную эффективность по сравнению с примером на фиг.6, так как проекционное 2D-изображение может быть реконструировано непосредственно подавлением срез-селектирующего градиента или посредством использования большой толщины среза (относительно представляющего интерес простирания на глубину) без необходимости возбуждения и считывания конкретных проекционных 1D-линий.
Параллельная проекция может обеспечивать одно или более из упрощенной геометрии по сравнению с расходящимся подходом, взаимно однозначного соответствия между пикселями проекционного изображения и плоскостью, определяющей «проекцию со стороны пучка», или более легкой томографической реконструкции из многочисленных проекций. Для сравнения, томографическая реконструкция CBCT на основе рентгеновского излучения представляет собой только аппроксимацию из-за расходимости полученных проекционных изображений с коническим пучком. В примерах или расходящихся или параллельных проекционных 1D-линий разнесение или ориентация проекционных линий не должны быть равномерными и могут задаваться в зависимости от многочисленных факторов. Например, пространственное разрешение в направлении предсказываемого движения цели в пределах поля зрения проекционного изображения и параллельно плоскости проекционного изображения может быть повышено посредством увеличения пространственной частоты проекционных линий в направлении предсказываемого движения. Аналогично, могут обеспечиваться более короткие полные получения посредством использования более разреженного набора расходящихся проекционных линий.
Проекционная MR-визуализация, например, с использованием 2D-возбуждения без необходимости использования срез-селектирующего градиента, или с использованием большой глубины среза, охватывающей представляющую интерес глубину
Фиг.7A иллюстрирует в общих чертах метод 700A, например, способ, который может включать в себя возбуждение области визуализируемого субъекта с использованием последовательности возбуждения двумерной (2D) MR-визуализации на этапе 702. Фиг.7B иллюстрирует, в общих чертах, другой метод 700B, например, способ, который также может включать в себя возбуждение области визуализируемого субъекта с использованием последовательности возбуждения двумерной (2D) MR-визуализации на этапе 702.
В примере на фиг.7A, проекционное 2D MR-изображение может быть получено на этапе 704A посредством использования последовательности 2D-визуализации без необходимости использования срез-селектирующего градиента (например, импульсная последовательность срез-селектирующего градиента может подавляться или опускаться), так что информация в направлении глубины (например, в направлении проекционной визуализации и перпендикулярно плоскости результирующего проекционного изображения) получается на всех глубинах в пределах возбужденной области. Такой подход не требует возбуждения и градиентного считывания проекционных 1D-линий и, поэтому, может уменьшать длительность получения изображения по сравнению с подходом получения 1D-проекции в случае, где требуются параллельные проекционные 1D-линии.
В примере на фиг.7B, проекционное 2D-изображение MR может быть получено на этапе 704B посредством использования последовательности 2D-визуализации с использованием срез-селектирующего градиента, определяющего срез, достаточно большой по глубине, чтобы охватывать область с представляющей интерес глубиной, например, соответствующую части или полной протяженности цели лучевой терапии в направлении, параллельном проекционному углу. Когда увеличивается толщина среза, размер глубины среза включает в себя все больший и больший вклад в анатомическую информацию, которая ранее была вне поля обзора по глубине. Такая информация о глубине сжимается в местоположение единственной точки или пикселя в результирующем проекционном 2D-изображении. Метод 700B на фиг.7B аналогично предлагает уменьшенную длительность получения изображения по сравнению с подходом 1D-проекции и может упоминаться как подход проекции с «очень толстым срезом».
Данные MR-визуализации также могут быть получены в «k-пространстве», представляющем координатное пространство, соответствующее пространственному преобразованию Фурье информации о визуализации. Например, данные MR-визуализации могут естественно собираться в k-пространстве посредством изменения градиентов изображения; конкретная комбинация градиентов x, y и z, в основном, соответствует единственной точке в k-пространстве. Последовательно заполняя точки в k-пространстве, обратное преобразование Фурье затем может применяться к представлению k-пространства для генерирования изображения. 2D-плоскость в k-пространстве соответствует 2D-проекции в пространстве изображения. Следовательно, 2D-проекция также может быть получена посредством сбора точек k-пространства, которые лежат в плоскости в k-пространстве, и генерированием обратного 2D-преобразования Фурье на плоскости в k-пространстве (срез k-пространства) для получения 2D-проекции в пространстве изображения.
Трехмерная (3D) и четырехмерная (4D) визуализация с использованием проекционной MR-визуализации, например, коррелированной с физиологическим циклом
Фиг.8 иллюстрирует, в общих чертах, метод 800A, такой как способ, который может включать в себя генерирование двумерных (2D) проекционных MR-изображений, например, представляющих разные проекционные углы, и использование таких проекционных 2D-изображений для построения трехмерных (3D) изображений. Соответствующий метод 800B показан схематически на фиг.8B.
На этапе 802A может генерироваться последовательность проекционных 2D MR-изображений, например, используя один или более методов, упомянутых в других местах в данном документе, как показано, например, на фиг.6 (посредством объединения проекционных 1D-линий) или как показано на фиг.7A или фиг.7B. Ссылаясь на фиг.8 на этапе 802B проекционные 2D-изображения P1, P2, P3, …, PN могут быть получены под разными проекционными углами. Например, проекционные углы могут задаваться для захвата проекционных направлений вокруг визуализируемого субъекта. Затем может выполняться томографическая реконструкция для получения 3D-изображения. Когда проекционное направление поворачивается вокруг пациента, методы томографической реконструкции, такие как подобные рентгеновским методам, включающие в себя CT- или CBCT-реконструкцию, могут использоваться или для создания нового 3D-изображения или для обновления предыдущего 3D-изображения новой информацией.
Однако движение может вызывать размытие в реконструированных 3D-изображениях. Следовательно, на фиг.8A на этапе 804A конкретные полученные проекционные 2D-изображения могут назначаться бинам, используя информацию, указывающую временное положение в физиологическом цикле, таком как дыхание. Такой биннинг может выполняться с использованием информации, получаемой от одного или более заменителей, внешнего маркера или внутреннего маркера или признака. Например, чтобы получить информацию, указывающую дыхательный цикл, пояс для измерения дыхания может использоваться для обеспечения сигнала-заменителя, или движение диафрагмы может отслеживаться в полученной информации о визуализации.
Как показано на фиг.8B, на этапе 804B f(t) может представлять график сигнала, представляющего часть физиологического цикла, такого как дыхание. Могут устанавливаться различные бины, такие как бины φ1, φ2, φ3, …, φn фазы, например, соответствующие участкам (например, диапазону Δt) вдоль f(t). Полученные проекционные 2D-изображения могут назначаться бинам φ1, φ2, φ3, …, φn, например, посредством определения участка f(t), на который попадает конкретное полученное изображение. Использование бинов на основе фазы является исключительно иллюстративным, бины амплитуды могут использоваться аналогичным образом, например, соответствующие диапазонам амплитуды (например, диапазону Δf) вдоль f(t).
Как показано на фиг.8A, на этапе 806A может строиться 3D-изображение с использованием распределенной по бинам последовательности проекционных 2D-изображений, соответствующих разным проекционным углам. В контексте фиг.8B на этапе 806B 3D-изображения I1, I2, I3, …, In могут соответствовать каждому из бинов f1, f2, f3, …, fn. Как показано на фиг.8A, на этапе 808A информация о 4D-визуализации может составляться объединением 3D-изображений, построенных на этапе 806A. В контексте фиг.8B, последовательность 3D-изображений может обеспечивать 4D-представление отображаемой области субъекта на всем протяжении физиологического цикла. Движение, вызываемое физиологическим циклом, таким как дыхание, в основном, в значительной степени может быть периодическим и воспроизводимым.
Проекционная MR-визуализация для управления лучевой терапией
Фиг.9 иллюстрирует в общих чертах метод, такой как способ, который может включать в себя генерирование двумерного (2D) проекционного изображения с использованием MR-визуализации и определение изменения между сгенерированным проекционным 2D-изображением и информацией об опорной визуализации. На этапе 902 может приниматься информация об опорной визуализации. Например, методы 800A или 800B на фиг.8A или фиг.8B могут использоваться для получения информации об опорной визуализации, например, перед лечением. В другом примере также может генерироваться конкретное опорное 3D-изображение, не требуя генерирования других 3D-изображений или объединения полученных 3D-изображений в информацию о 4D-визуализации. Например, если должна доставляться управляемая дыханием терапия во время конкретной фазы или амплитуды дыхательного цикла, одно или более 3D-изображений могут быть построены в соответствии с частью представляющего интерес дыхательного цикла, или во время планирования перед лечением или в пределах фракции.
На этапе 904 проекционное 2D-изображение может генерироваться с использованием методов, показанных и описанных в других местах в данном документе (например, используя последовательность 2D MR-визуализации с большим срез-селектирующим градиентом или без срез-селектирующего градиента, или объединением полученной информации, соответствующей многочисленным проекционным 1D-линиям). На этапе 906 может определяться изменение между сгенерированным проекционным 2D-изображением и информацией об опорной визуализации. На этапе 908 доставка лучевой терапии может управляться по меньшей мере частично с использованием информации, указывающей определенное изменение.
Определенное изменение может обеспечивать информацию, указывающую одно или более из обновленного местоположения целевой области, анатомического признака или ориентира или движения целевой области, анатомического признака или ориентира, в качестве иллюстративных примеров. В одном примере, проекционное 2D MR-изображение, сгенерированное на этапе 904, может включать в себя или может быть связано с движением цели с ракурса плоскости «проекции со стороны пучка» (BEV) лучевой терапии. Существуют различные пути, согласно которым движение цели в плоскости BEV может извлекаться из проекционного 2D MR-изображения.
В одном подходе, может выполняться 2D/3D-регистрация между проекционным 2D MR-изображением и информацией о 3D MR-визуализации, например, таким образом, который подобен методам, описанным для регистрации между проекционным рентгеновским изображением и опорным изображением CT или CBCT. Такой подход может использоваться, например, для идентификации одного или более поступательных движений, которые обеспечивают совпадение между проекционным 2D-изображением и информацией о сдвинутой 3D MR-визуализации, а идентифицированное поступательное движение может использоваться в качестве «изменения» в контексте фиг.9 на этапе 906 и 908 для управления доставкой, например, повторным расположением одного или более из блока вывода пучка для терапии или пациента, или модифицированием апертуры пучка для терапии. Качество совпадения может определяться, например, использованием одной или более метрик, например, может включать в себя определение нормализованной взаимной корреляции или взаимной информации. Вращения и деформации могут быть включены в метод регистрации за счет упрощения и эффективности вычислений.
В другом подходе, может выполняться уменьшение размерности, например, преобразованием проблемы 2D/3D-регистрации в проблему 2D/2D-регистрации. В одном подходе опорные проекции могут извлекаться из информации об опорной 3D MR- визуализации таким образом, который подобен реконструированным цифровым образом рентгеновским снимкам (DRR) при визуализации радиотерапии на основе рентгеновского излучения. Может использоваться сегментирование, например, для идентификации цели или окружающих структур, таких как OAR, хотя одно или более из цели лучевой терапии или OAR могут маскироваться структурами, которые лежат на пути проекционного направления. Если цель или другая структура была сегментирована, может идентифицироваться движение цели или другой структуры. Такое движение также может использоваться для предсказания будущего местоположения цели.
Может существовать проблема при попытке регистрации или сравнения иным образом проекционных MR-изображений, получаемых позже, с информацией об опорной 3D или 4D MR-визуализации. Получаемые позже проекционные MR-изображения могут иметь другое качество изображения, чем информация об опорной визуализации, особенно тогда, когда информация об опорной визуализации была получена без использования проекционной визуализации. Методы регистрации, в основном, являются более эффективными при сравнении изображений, имеющих подобное качество или характеристики изображения. Изобретатели настоящего изобретения выяснили, помимо всего прочего, что информация об опорной визуализации (такая, как принимаемая на этапе 902 на фиг.9) может получаться с использованием проекционной MR-визуализации , например, используя вращающийся набор проекций.
Как упомянуто в отношении фиг.8A и фиг.8B, такие MR-проекции могут использоваться для реконструкции 3D MR-изображения, например, используя метод томографической реконструкции. Таким образом, опорное 3D MR-изображение будет иметь подобное качество изображения, что и получаемые позже проекционные MR-изображения. В одном примере получаемое позже проекционное MR-изображение может сравниваться непосредственно с полученным опорным проекционным MR-изображением, не требуя использования информации об опорной 3D- или 4D- визуализации.
Как упомянуто выше, если проекционные направления вращаются вокруг визуализируемого субъекта, информация об опорной 4D MR-визуализации может составляться таким образом, который подобен 4D-CBCT, так как конкретные проекции, в основном, будут содержать разные виды анатомии визуализируемого субъекта. Такая анатомия может включать в себя ориентиры, такие как показывающие местоположение диафрагмы, или область, выбираемую в качестве цели облучения. Общие анатомические ориентиры затем могут использоваться для биннинга проекций для формирования последовательности 4D MR-визуализации (MRI), а не использование независимого заменителя.
Длительность получения для получения информации о 3D- или 4D-визуализации может управляться с использованием методов проекционной MR-визуализации. Например, длительность получения может быть значительно укорочена, например, посредством получения более ограниченного количества томографических проекций и использования методов разреженной томографической реконструкции, таких как, сжатое считывание или сжатое считывание предшествующего изображения (PICCS). Длительность получения также может быть улучшена, например, использованием стратегий параллельных визуализаций, включающих в себя одну или более из многочисленных катушек передачи и приема с разными профилями чувствительности.
В примерах, описанных в данном документе, MR-проекциям нет необходимости включать в себя профили проекции, которые охватывают пациента целиком по размеру глубины вдоль проекционного направления. Например, конкретное проекционное MR-изображение может использовать конечную толщину среза, охватывающую целиком представляющую интерес область по размеру глубины. Уменьшение протяженности размера глубины может способствовать снижению затемнения представляющей интерес области (например, затенения) посредством вышележащей или нижележащей анатомии по размеру глубины, но за счет уменьшения или устранения возможности обеспечения полной томографической реконструкции.
Пространственные расположения проекционных MR-визуализаций, например, относительно ориентации пучка для лучевой терапии
Фиг.10A иллюстрирует в общих чертах пространственное расположение ориентации 1090 пучка для лучевой терапии относительно одного или более проекционных направлений, которое, например, может включать в себя два проекционных направления, ориентированных ортогонально друг другу. В самом простом подходе, проекционное MR-изображение может быть получено с использованием ориентации 1060A проекционной линии, которая совпадает с ориентацией 1090 пучка для терапии в первом угловом положении θA. Как упомянуто в отношении других примеров, плоскость 1070A проекционной визуализации может включать в себя информацию, получаемую с использованием параллельной проекции (например, такой как соответствующая линиям 1064A и 1062A) или с использованием ориентации расходящихся проекционных линий, сходящихся в местоположении 1050. Проекционное MR-изображение может получать информацию вдоль проекционных линий, охватывая представляющую интерес область 1012, такую как включающую в себя изоцентр 101 лечения. Таким образом, плоскость 1070A проекционных визуализаций может обеспечивать представление визуализации подобное проекции со стороны пучка (BEV) или портальному изображению.
Конфигурация, показанная на фиг.10A, может быть статической, или ориентация пучка и ориентация проекционной линии могут поворачиваться вместе вокруг пациента (как в примере установленного на гентри блока вывода пучка для лечения, обеспечивающего портальную визуализацию). Ориентация для проекционной MR-визуализации, выставленной с BEV, в основном, является полезным направлением, так как апертура пучка для терапии, в основном, имеет форму для обеспечения заданного профиля в плоскости, параллельной плоскости 1070A проекционной визуализации. Без визуализации с других направлений, движение цели или признаков визуализации не может явно определяться по направлению глубины (например, направлению Y), но существуют подходы для оценки такого движения, если является доступной информация в плоскости, указывающая движение цели. В противном случае, могут быть получены дополнительные проекции, имеющие другие проекционные направления.
В одном примере, могут быть получены одна или более MR-проекций, перпендикулярных плоскости BEV, например, в различные разные моменты времени. Такие ортогональные изображения могут способствовать получению информации, отсутствующей в направлении глубины (например, в направлении Y) вдоль ориентации 1060A первой проекционной линии. Например, как показано иллюстративно на фиг.10A, ориентация 1060B второй проекционной линии может использоваться в ортогональном угловом положении θB, определяющем плоскость 1070B проекционной визуализации, ортогональной первой плоскости 1070A проекционной визуализации. Снова, могут устанавливаться параллельные или расходящиеся проекционные линии, такие как параллельные линии 1064B и 1062B, показанные на фиг.10A.
Чередование или установление иного порядка следования между проекциями, параллельными и перпендикулярными плоскости BEV, может обеспечивать полную информацию по глубине за счет уменьшенной частоты получения проекций, параллельных BEV. Ортогональная конфигурация, показанная на фиг.10A, может моделировать стереоскопическую визуализацию на основе установленного на гентри рентгеновского излучателя. Как в проиллюстративном примере, нет необходимости получать перпендикулярные проекции попеременно для получения каждой проекции BEV. Например, ориентация ортогональной проекции может использоваться для получения только время от времени для установления или обновления корреляции между движением цели в BEV и движением в направлении глубины.
Фиг.10B иллюстрирует, в общих чертах, пространственное расположение проекционных направлений 1060A, 1060B и 106°C MR-визуализации, например, соответствующих положениям θA, θB, θC проекционных углов, охватывающим дугу или окружность вокруг заданной области, такой как изоцентр 1010 лечения лучевой терапией. Соответствующие проекционные направления 1060A, 1060B и 106°C могут обеспечивать конкретные ориентации 1070A, 1070B и 107°C плоскости проекционной визуализации. Для вращательных доставок лечения лучевой терапией BEV естественным образом поворачивается вокруг пациента, например, когда источник лучевой терапии установлен на гентри. Получаемые проекционные изображения могут иметь более одного назначения. Например, как упомянуто выше, конкретное проекционное изображение BEV может предоставлять информацию, указывающую положение или форму цели лучевой терапии, с ракурса источника пучка для лучевой терапии. Также, если получается последовательность проекционных изображений, может реконструироваться томографическое 3D MR-изображение. Ориентации MR-проекций, показанные на фиг.10B, не ограничиваются примерами, где вращается источник пучка для лучевой терапии. Например, для лучевой терапии, включающей в себя одно или более полей статической терапии, вращающиеся MR-проекции могут получаться отдельно от проекций BEV, например, чередующимся образом или в соответствии с другой заданной последовательностью визуализаций.
Фиг.10C иллюстрирует, в общих чертах, пространственное расположение проекционного направления 1060D MR-визуализации, например, ориентированного под заданным углом α относительно направления пучка для лучевой терапии. Пучок 1090 для лучевой терапии может расходиться из местоположения 1050 источника, и плоскость 1092 может определять BEV. В противоположность другим примерам, проекционное направление 1060D MR-визуализации может задаваться для захвата ракурса визуализации немного отличного от проекции BEV, чтобы получать информацию о визуализации, соответствующую временно продвинутой BEV, смещенной от текущей BEV. Такая усовершенствованная по времени проекционная MR-визуализация может включать в себя угол α, задаваемый для учета запаздывания во времени, связанного с одним или более из получения проекционной MR-визуализации, коррекции протокола доставки лучевой терапии или обновления протокола доставки лучевой терапии в ответ на полученную проекционную MR-визуализации. Как в других примерах могут использоваться схемы параллельной или расходящейся проекционной MR-визуализации, и, также как и в других примерах ориентация 1060D проекционной линии может вращаться относительно ориентации пучка для лучевой терапии, когда пучок для лучевой терапии вращается вокруг пациента.
Угол α продвижения может определяться с использованием информации об одном или более из известной длительности запаздывания или угловой скорости гентри, определяющего положение пучка, как в иллюстративном примере. Метод предсказания может применяться к информации, получаемой из «плоскости 1070D продвижения BEV», например, для предсказания наиболее вероятного положения цели, которое будет иметь место к тому времени, когда положение пучка блока вывода терапии приблизится к совмещению с плоскостью 1070D продвижения BEV. Примеры методов предсказания могут включать в себя одно или более из ядерной оценки плотности, методов вейвлет-преобразования или методов релевантных векторов (RVM). Размерность проблемы предсказания может быть снижена с трех размеров до двух размеров, так как проецируемое движение может ограничиваться ракурсом плоскости 1070D продвижения BEV, а не необходимостью предсказания движения цели в трехмерном координатном пространстве.
Фиг. 10D иллюстрирует в общих чертах пространственное расположение проекционных направлений 1060E и 1060F MR-визуализации, например, может задаваться для обеспечения проекционных MR-изображений в плоскостях 1070E и 1070F проекции аналогично стереоскопической рентгеновской визуализации. В примере на фиг.10D нет необходимости получать проекционное изображение в направлении BEV, но может все же получаться с использованием фиксированных ориентаций, например, моделирующих установленную в помещении технику стереоскопической рентгеновской визуализации. В качестве иллюстративного примера, чередующиеся MR-проекции в переднезаднем и боковом направлениях могут получаться, например, чтобы способствовать локализации цели лучевой терапии или других анатомических признаков. В одном примере может использоваться объединение проекционных направлений MR, например, фиксированных ориентаций и вращающихся ориентаций, соответствующих положению гентри. В качестве иллюстративного примера, могут получаться три или более проекций, например, чередующимся образом, включая проекцию, ориентированную для совпадения с BEV; переднезаднюю проекцию; и боковую проекцию. Каждая из проекций может выбираться для того, чтобы включать траекторию, пересекающую заданную область визуализируемого субъекта, например, изоцентр 1010 лечения. Для таких проекций нет необходимости, чтобы каждая проекция должна получаться с одинаковой скоростью визуализации.
Различные примечания и примеры
Пример 1 может включать в себя или использовать объект изобретения (такой как аппарат, способ, средство для выполнения действий или считываемый устройством носитель данных, включающий в себя инструкции, которые, будучи исполняемыми устройством, могут вызывать выполнение устройством действий), например, может включать в себя способ генерирования информации о четырехмерной (4D) визуализации, представляющей физиологический цикл субъекта, причем способ содержит: генерирование двух или более двумерных (2D) изображений, причем 2D-изображения содержат проекционные изображения, представляющие разные проекционные углы, и 2D-изображения генерируются с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR); назначение конкретных 2D-изображений бинам по меньшей мере частично с использованием информации, указывающей временные положения в физиологическом цикле, соответствующие конкретным 2D-изображениям; построение трехмерных (3D) изображений с использованием сгруппированных по бинам 2D-изображений; и построение информации о 4D-визуализации, содержащее объединение 3D-изображений.
В примере 2 объект изобретения по примеру 1 необязательно включает в себя: физиологический цикл, содержащий дыхательный цикл; и получение двух или более 2D-изображений, содержащих получение 2D-изображений, представляющих разные проекционные углы, в течение длительности времени, охватывающей многочисленные дыхательные циклы.
В примере 3 объект изобретения по любому одному или более из примеров 1-2 необязательно включает в себя генерирование двух или более проекционных 2D-изображений, включающее объединение полученных одномерных (1D) проекционных линий в конкретное 2D-изображение, причем проекционные 1D-линии пространственно ориентированы параллельно друг другу.
В примере 4 объект изобретения по любому одному или более из примеров 1-3 необязательно включает в себя генерирование двух или более проекционных 2D-изображений, включающее объединение полученных одномерных (1D) проекционных линий в конкретное 2D-изображение, причем проекционные 1D-линии ориентированы пространственно расходящимися друг от друга.
В примере 5 объект изобретения любого одного или более из примеров 1-4 необязательно включают в себя генерирование двух или более проекционных 2D-изображений, включающее в себя получение 2D-среза MR-визуализации, перпендикулярного проекционному углу без необходимости использования срез-селектирующего градиента.
В примере 6, объект изобретения по любому одному или более из примеров 1-5 необязательно включает в себя генерирование двух или более проекционных 2D-изображений, включающее в себя получение 2D-среза MR-визуализации, перпендикулярного проекционному углу, с использованием срез-селектирующего градиента, определяющего срез, достаточно большой по глубине, чтобы полностью охватывать протяженность цели лучевой терапии по размеру, параллельному проекционному углу.
В примере 7, объект изобретения по любому одному или более из примеров 1-6 необязательно включает в себя проекционные углы, охватывающие дугу, вращающуюся вокруг заданной центральной оси.
В примере 8, объект изобретения по любому одному или более из примеров 1-7 необязательно включает в себя определение фазы участка физиологического цикла, соответствующего конкретным 2D-изображениям; и назначение конкретных 2D-изображений бинам с использованием информации, указывающей определенную фазу.
В примере 9 объект изобретения по любому одному или более из примеров 1-8 необязательно включает в себя определение амплитуды участка физиологического цикла, соответствующего конкретным 2D-изображениям; и назначение конкретных 2D-изображений бинам с использованием информации, указывающей определенную амплитуду.
В примере 10, объект изобретения по любому одному или более из примеров 1-9 необязательно включает в себя одну или более из фазы или амплитуды участка физиологического цикла, соответствующего конкретным 2D-изображениям, определенных с использованием признака, извлеченного из конкретных 2D-изображений.
В примере 11, объект изобретения по примеру 10 необязательно включает в себя извлеченный признак, соответствующий диафрагме визуализируемого субъекта.
В примере 12 объект изобретения по любому одному или более из примеров 1-11 необязательно включает в себя назначение конкретных 2D-изображений бинам, использующее уменьшение размерности полученной информации о визуализации.
В примере 13 объект изобретения по любому одному или более из примеров 1-12 необязательно включает в себя назначение конкретных 2D-изображений бинам, использующее преобразование Фурье конкретных 2D-изображений.
В примере 14 объект изобретения по любому одному или более из примеров 1-13 необязательно включает в себя построение 3D-изображения из полученных проекционных 2D-изображений, используя метод томографической реконструкции изображения.
В примере 15 объект изобретения по любому одному или более из примеров 1-14 необязательно включает в себя построение 3D-изображения из полученных проекционных 2D-изображений, включая выполнение построения 3D-изображения с использованием преобразованной информации о визуализации, представленной в Фурье-пространстве.
В примере 16 объект изобретения по любому одному или более из примеров 1-15 необязательно включает в себя построение 3D-изображения из полученных проекционных 2D-изображений, включая выполнение построения 3D-изображения с использованием метода фильтрованной обратной проекции.
В примере 17 объект изобретения по любому одному или более из примеров 1-16 необязательно включает в себя построение 3D-изображения из полученных проекционных 2D-изображений, включая выполнение построения 3D-изображения с использованием метода сжатого считывания.
В примере 18 объект изобретения по любому одному или более из примеров 1-17 необязательно включает в себя построение 3D-изображения из полученных проекционных 2D-изображений, включая выполнение построения 3D-изображения с использованием построения Фельдмана-Дависа-Кресса.
В примере 19 объект изобретения по любому одному или более из примеров 1-18 необязательно включает в себя построение 3D-изображения из полученных проекционных 2D-изображений, включая выполнение построения 3D-изображения с использованием итеративного подхода.
В примере 20 объект изобретения по любому одному или более из примеров 1-19 необязательно включает в себя обеспечение информации о 4D-визуализации для использования при создании или адаптации плана лечения лучевой терапией.
В примере 21 объект изобретения по любому одному или более из примеров 1-20 необязательно включает в себя использование информации о 4D-визуализации для назначения или определения положения пациента перед доставкой фракции лечения лучевой терапией.
Пример 22 может включать в себя или может необязательно объединяться с объектом изобретения по одному или любой комбинации примеров 1-21 для включения объекта изобретения (такого как аппарат, способ, средство для выполнения действий или машиночитаемый носитель данных, включающий в себя инструкции, которые, будучи исполняемыми машиной, могут вызывать выполнение машиной действий), например, может включать в себя способ управления доставкой лучевой терапии на субъект, используя проекционную визуализацию, причем способ содержит: прием информации об опорной визуализации; генерирование двумерного (2D) проекционного изображения с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR), причем проекционное 2D-изображение соответствует заданному проекционному направлению, заданное проекционное направление включает в себя траекторию, пересекающую по меньшей мере часть визуализируемого субъекта; определение изменения между сгенерированным проекционным 2D-изображением и информацией об опорной визуализации; управление доставкой лучевой терапии по меньшей мере частично с использованием определенного изменения между полученным проекционным 2D-изображением и информацией об опорной визуализации.
В примере 23 объект изобретения по примеру 22 необязательно включает в себя генерирование проекционного 2D-изображения, содержащее объединение полученных одномерных (1D) проекционных линий.
В примере 24 объект изобретения по примеру 23 необязательно включает в себя то, что заданное проекционное направление задается по меньшей мере частично для обеспечения проекционных 1D-линий, определяемых соответствующими траекториями, пересекающими изоцентр лечения лучевой терапией.
В примере 25 объект изобретения по любому одному или более из примеров 23-24 необязательно включает в себя то, что проекционные 1D-линии ориентированы так, что пространственно расходятся одна от другой.
В примере 26 объект изобретения по любому одному или более из примеров 23-25 необязательно включает в себя то, что направления, соответствующие конкретным проекционным 1D-линиям задаются так, чтобы сходиться в местоположении, соответствующем доступному положению блока вывода пучка для лучевой терапии.
В примере 27 объект изобретения по любому одному или более из примеров 23-26 необязательно включает в себя то, что генерирование проекционного 2D-изображения содержит получение 2D-среза MR-визуализации, перпендикулярного проекционному углу без необходимости использования срез-селектирующего градиента.
В примере 28 объект изобретения по любому одному или более из примеров 23-27 необязательно включает в себя то, что генерирование проекционного 2D-изображения содержит получение 2D-среза MR-визуализации, перпендикулярного проекционному углу, с использованием срез-селектирующего градиента, определяющего срез, достаточно большой по глубине, чтобы полностью охватывать протяженность цели лучевой терапии по размеру, параллельному проекционному углу.
В примере 29 объект изобретения по любому одному или более из примеров 22-28 необязательно включает в себя то, что заданное проекционное направление соответствует настоящему или будущему направлению пучка для лучевой терапии.
В примере 30 объект изобретения по любому одному или более из примеров 22-29 необязательно включает в себя то, что заданное проекционное направление является ортогональным настоящему или будущему направлению пучка для лучевой терапии.
В примере 31 объект изобретения по любому одному или более из примеров 22-30 необязательно включает в себя то, что заданное проекционное направление устанавливается, не требуя направления пучка для лучевой терапии.
В примере 32 объект изобретения по любому одному или более из примеров 22-31 необязательно включает в себя то, что опорное изображение содержит второе проекционное 2D-изображение, сгенерированное с использованием ранее полученной информации о визуализации.
В примере 33 объект изобретения по примеру 32 необязательно включает в себя то, что второе проекционное 2D-изображение генерируется с использованием информации о четырехмерной (4D) визуализации, составленной из ранее полученной информации о визуализации.
В примере 34 объект изобретения по любому одному или более из примеров 22-33 необязательно включает в себя то, что опорное изображение содержит информацию о трехмерной (3D) визуализации, соответствующую ранее полученной информации о визуализации.
В примере 35 объект изобретения по любому одному или более из примеров 22-34 необязательно включает в себя то, что опорное изображение содержит информацию о 4D-визуализации, составленную из ранее полученной информации о визуализации.
В примере 36 объект изобретения по любому одному или более из примеров 22-35 необязательно включает в себя то, что опорное изображение содержит 3D-изображение, извлеченное из части информации о 4D-визуализации, причем информация о 4D-визуализации составлена из ранее полученной информации о визуализации.
В примере 37 объект изобретения по примеру 36 необязательно включает в себя то, что выбранная часть информации о 4D-визуализации содержит заданный участок физиологического цикла.
В примере 38 объект изобретения по любому одному или более из примеров 22-37 необязательно включает в себя то, что определение изменения включает в себя использование последовательности из двух или более проекционных 2D-изображений, сгенерированных с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR).
В примере 39 объект изобретения по любому одному или более из примеров 22-38 необязательно включает в себя то, что определение изменения включает в себя регистрацию по меньшей мере части проекционного 2D-изображения с опорным изображением.
В примере 40 объект изобретения по любому одному или более из примеров 22-39 необязательно включает в себя то, что определение изменения содержит извлечение признака из проекционного 2D-изображения.
В примере 41 объект изобретения по любому одному или более из примеров 22-40 необязательно включает в себя то, что определение изменения включает в себя сегментирование части проекционного 2D-изображения.
В примере 42 объект изобретения по примеру 41 необязательно включает в себя то, что сегментированная часть проекционного 2D-изображения содержит ракурс цели лучевой терапии.
В примере 43 объект изобретения по любому одному или более из примеров 22-42 необязательно включает в себя то, что определение изменения содержит триангуляцию между определенными ракурсами цели лучевой терапии, сегментированными из двух или более проекционных 2D-изображений.
В примере 44 объект изобретения по любому одному или более из примеров 22-43 необязательно включает в себя предсказание местоположения цели лучевой терапии с использованием определенного изменения и модели предсказания.
В примере 45, объект изобретения по примеру 44 необязательно включает в себя, что модель предсказания включает в себя использование информации, указывающей движение цели, установленное по меньшей мере частично, с использованием извлеченных ракурсов цели лучевой терапии из последовательности полученных проекционных 2D-изображений, и определенного изменения между по меньшей мере одним проекционным 2D-изображением и опорным изображением.
Пример 46 может включать в себя или может необязательно объединяться с объектом изобретения одного или любой комбинации примеров 1-45 для включения объекта изобретения (такого как аппарат, способ, средство для выполнения действий или машиночитаемый носитель данных, включающий в себя инструкции, которые, будучи исполняемыми машиной, могут вызывать выполнение машиной действий), например, может включать в себя систему визуализации, содержащую: по меньшей мере одну процессорную схему и считываемый процессором носитель данных, причем считываемый процессором носитель данных включает в себя инструкции, которые при выполнении процессорной схемой вызывают процессорной схемой генерирование информации о четырехмерной (4D) визуализации, представляющей физиологический цикл субъекта, включающее в себя: генерирование двух или более двумерных (2D) изображений, причем 2D-изображения содержат проекционные изображения, представляющие разные проекционные углы, и 2D-изображения генерируются с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR); назначение конкретных 2D-изображений бинам по меньшей мере частично с использованием информации, указывающей временные положения в физиологическом цикле, соответствующие конкретным 2D-изображениям; построение трехмерных (3D) изображений с использованием сгруппированных по бинам 2D-изображений; и построение информации о 4D-визуализации, содержащее объединение 3D-изображений.
Пример 47 может включать в себя, или может необязательно объединяться с объектом изобретения одного или любой комбинации примеров 1-46 для включения объекта изобретения (такого как аппарат, способ, средство для выполнения действий или машиночитаемый носитель данных, включающий в себя инструкции, которые, будучи исполняемыми машиной, могут вызывать выполнение машиной действий), например, может включать в себя систему лечения лучевой терапией, содержащую: генератор терапии; и блок вывода терапии; причем система контроллера терапии подсоединена к генератору лучевой терапии и блоку вывода лучевой терапии, система контроллера лучевой терапии содержит блок ввода визуализации, причем блок ввода визуализации выполнен с возможностью приема информации об опорной визуализации, система контроллера терапии выполнена с возможностью: генерирования двумерного (2D) проекционного изображения с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR), проекционное 2D-изображение соответствует заданному проекционному направлению, заданное проекционное направление включает в себя траекторию, пересекающую по меньшей мере часть визуализируемого субъекта; определения изменения между сгенерированным проекционным 2D-изображением и информацией об опорной визуализации; и управления доставкой лучевой терапии на блоке вывода лучевой терапии по меньшей мере частично с использованием определенного изменения между полученным проекционным 2D-изображением и информацией об опорной визуализации.
Каждый из неограничивающих примеров, описанных в данном документе, может использоваться отдельно или может объединяться с различными перестановками или комбинациями с одним или более из других примеров.
Вышеупомянутое подробное описание включает в себя ссылки на прилагаемые чертежи, которые образуют часть подробного описания. Чертежи изображают, посредством иллюстраций, конкретные варианты осуществления, по которым может быть осуществлено на практике изобретение. Эти варианты осуществления также упоминаются в данном документе как «примеры». Такие примеры могут включать в себя элементы в дополнение к тем, которые показаны или описаны. Однако изобретатели настоящего изобретения также рассматривают примеры, в которых представлены только те элементы, которые показаны или описаны. Кроме того, изобретатели настоящего изобретения также рассматривают примеры, использующие любую комбинацию или перестановку этих показанных или описанных элементов (или их один или более аспектов) или в отношении конкретного примера (или их одного или более аспектов), или в отношении других примеров (или их одного или более аспектов), показанных или описанных в данном документе.
В случае несовместимых использований между данным документом и любыми документами, включенными таким образом по ссылке, верным является использование в данном документе.
В данном документе используются элементы в единственном и множественном числе, что является общепринятым в патентных документах, для включения одного или более одного, независимо от любых других случаев или использований «по меньшей мере одного» или «одного или более». В данном документе, термин «или» используется для ссылки на неисключительность или, например, что «A или B» включает в себя «A, но не B», «B, но не A» и «A и B», если не указано иначе. В данном документе, термины «включающий в себя» и «в котором» используются в качестве простых эквивалентов соответствующих терминов «содержащий» и «в котором». Также, в нижеследующей формуле изобретения термины «включающий в себя» и «содержащий» допускают изменения, т.е. система, устройство, предмет, состав, формулировка или процесс, который включает в себя элементы в дополнение к тем, которые перечислены после такого термина в пункте формулы изобретения, как считается, все же подпадают под объем этого пункта формулы изобретения. Кроме того, в нижеследующей формуле изобретения термины «первый», «второй» и «третий» и т.д. используются просто в качестве меток и, как предполагается, не налагают числовые требования на эти объекты.
Примеры способов, описанные в данном примере, могут быть осуществлены по меньшей мере частично посредством машины или компьютера. Некоторые примеры могут включать в себя считываемый компьютером носитель данных или машиночитаемый носитель, кодированный инструкциями, действующими для конфигурирования электронного устройства на выполнение способов, описанных в вышеупомянутых примерах. Осуществление таких способов может включать в себя код, такой как микрокод, код языка ассемблера, код высокоуровневого языка или т.п. Такой код может включать в себя считываемые компьютером инструкции для выполнения различных способов. Код может формировать части продуктов компьютерной программы. Кроме того, в одном примере, код может осязаемо сохраняться на одном или более энергозависимых, невременных или энергонезависимых, осязаемых, считываемых компьютером носителей данных, например, во время исполнения или в другие моменты времени. Примеры таких осязаемых, считываемых компьютером носителей данных могут включать в себя, но не ограничиваются ими, жесткие диски, съемные магнитные диски, съемные оптические диски (например, компакт-диски или цифровые видеодиски), кассеты с магнитной лентой, карты памяти или карты памяти Memory stick, оперативные запоминающие устройства (RAM), постоянные запоминающие устройства (ROM) и т.п.
Вышеприведенное описание, как предполагается, является иллюстративным, а не ограничивающим. Например, вышеописанные примеры (или их один или более аспектов) могут использоваться в комбинации друг с другом. Могут использоваться другие варианты осуществления, например, специалистом в данной области техники после изучения вышеприведенного описания. Реферат предоставляется для того, чтобы читатель мог быстро выяснить сущность технического раскрытия. Он предоставляется с пониманием того, что он не будет использоваться для интерпретирования или ограничения объема или смысла формулы изобретения. Также, в вышеупомянутом подробном описании, различные признаки могут группироваться вместе для упрощения раскрытия. Это не должно интерпретироваться как предположение, что незаявленный описанный признак является существенным для любого пункта формулы изобретения. Скорее, объект изобретения может заключаться не во всех признаках конкретного раскрытого варианта осуществления. Таким образом, последующие пункты формулы изобретения настоящим документом включены в подробное описание в качестве примеров или вариантов осуществления, причем каждый пункт формулы изобретения в отдельности является отдельным вариантом осуществления, и рассматривается, что такие варианты осуществления могут объединяться друг с другом в различные комбинации или перестановки. Объем изобретения должен определяться со ссылкой на прилагаемую формулу изобретения вместе с полным объемом эквивалентов, на которые такая формула изобретения имеет право.

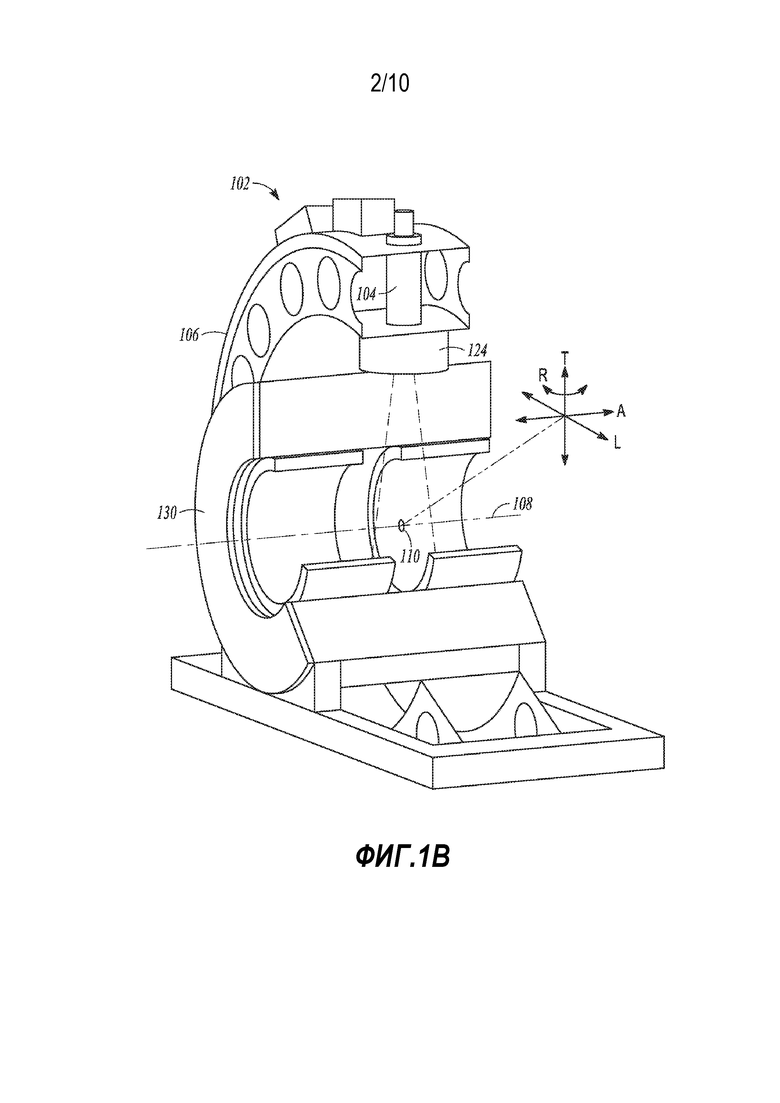
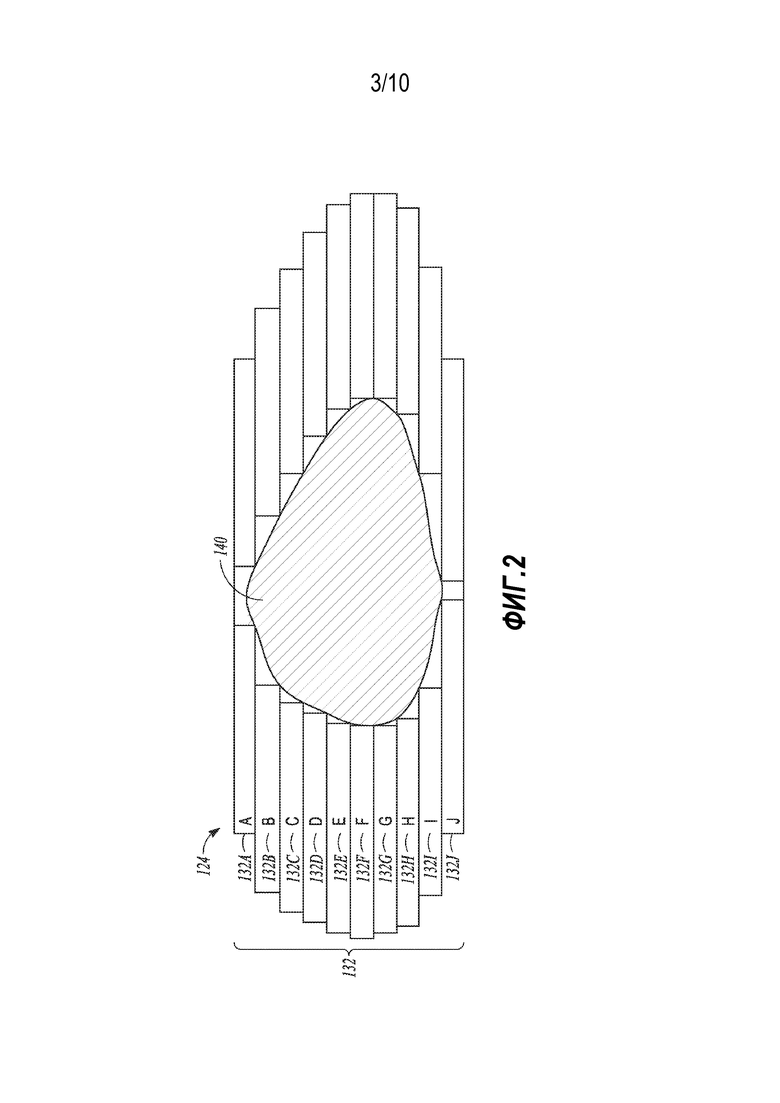

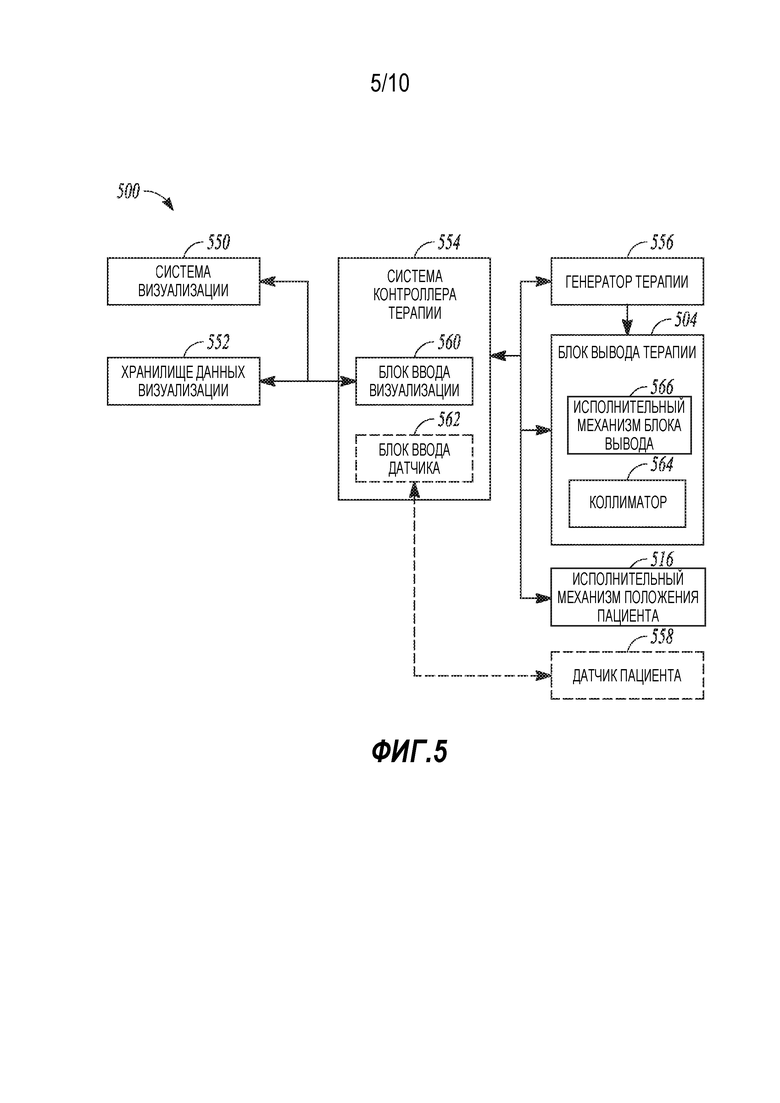

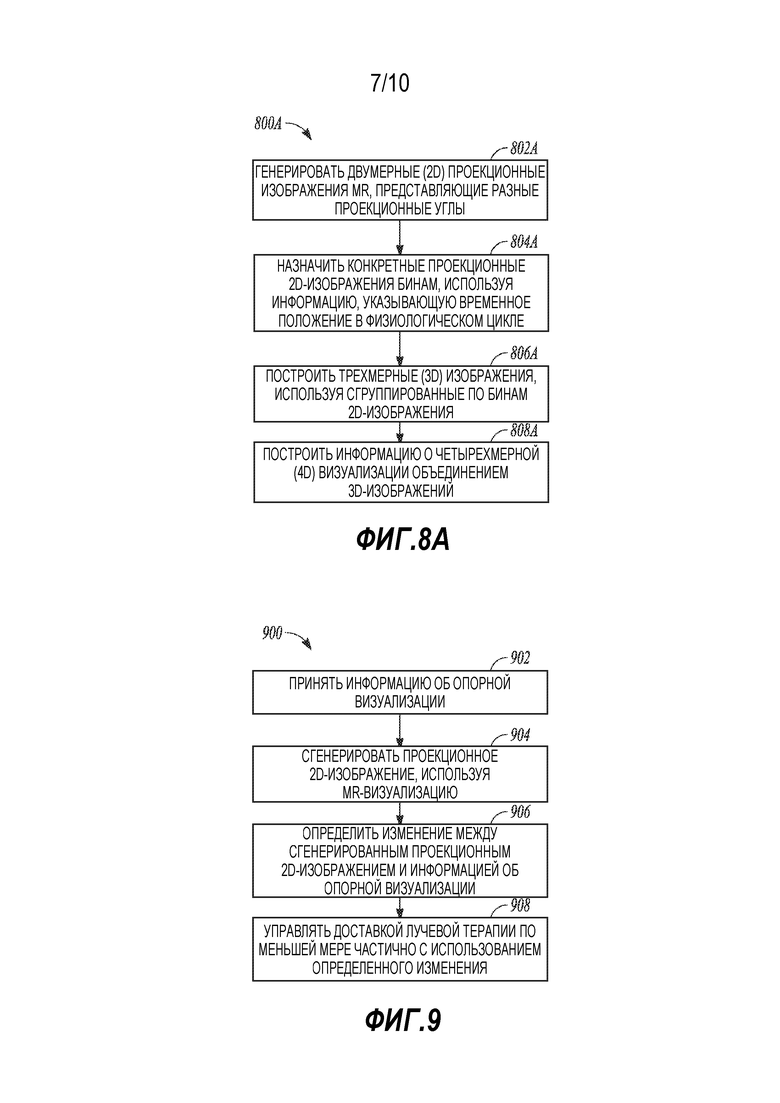



Использование: для проекционной визуализации методом ядерного магнитного резонанса (MR). Сущность изобретения заключается в том, что проекционная визуализации методом ядерного магнитного резонанса (MR) может использоваться для генерирования информации о четырехмерной (4D) визуализации, представляющей физиологический цикл субъекта, например, включающего в себя генерирование двух или более двумерных (2D) изображений, причем 2D-изображения содержат проекционные изображения, представляющие разные проекционные углы, и 2D-изображения генерируют с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR), назначение конкретных 2D-изображений бинам по меньшей мере частично с использованием информации, указывающей временные положения в физиологическом цикле, соответствующие конкретным 2D-изображениям, построение трехмерных (3D) изображений с использованием сгруппированных по бинам 2D-изображений и построение информации о 4D- визуализации, содержащее объединение 3D-изображений. Технический результат: обеспечение возможности предсказания последующего положения целевой области для адаптации лучевой терапии. 3 н. и, 20 з.п. ф-лы, 16 ил.
1. Реализуемый на компьютере способ генерирования информации о четырехмерной (4D) визуализации, представляющей физиологический цикл субъекта, содержащий:
генерирование двух или более двумерных (2D) изображений, причем 2D-изображения содержат проекционные изображения, представляющие разные проекционные углы, и 2D-изображения генерируют с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR);
назначение конкретных 2D-изображений бинам по меньшей мере частично с использованием информации, указывающей временные положения в физиологическом цикле, соответствующие конкретным 2D-изображениям;
построение трехмерных (3D) изображений с использованием сгруппированных по бинам 2D-изображений; и
построение информации о 4D-визуализации, содержащей объединение 3D-изображений.
2. Реализуемый на компьютере способ по п.1, причем:
физиологический цикл содержит дыхательный цикл; и
получение двух или более 2D-изображений содержит получение 2D-изображений, представляющих разные проекционные углы, в течение длительности времени, охватывающей многочисленные дыхательные циклы.
3. Реализуемый на компьютере способ по п.1, причем генерирование двух или более проекционных 2D-изображений содержит объединение полученных одномерных (1D) проекционных линий в конкретное 2D-изображение, причем проекционные 1D-линии пространственно ориентированы параллельно друг другу.
4. Реализуемый на компьютере способ по п.1, причем генерирование двух или более проекционных 2D-изображений содержит объединение полученных одномерных (1D) проекционных линий в конкретное 2D-изображение, причем проекционные 1D-линии пространственно ориентированы расходящимися друг от друга.
5. Реализуемый на компьютере способ по п.1, причем генерирование двух или более проекционных 2D-изображений содержит получение 2D-среза MR-визуализации, перпендикулярного проекционному углу без необходимости использования срез-селектирующего градиента.
6. Реализуемый на компьютере способ по п.1, причем генерирование двух или более проекционных 2D-изображений содержит получение 2D-среза MR-визуализации, перпендикулярного проекционному углу с использованием срез-селектирующего градиента, определяющего срез, достаточно большой по глубине, чтобы полностью охватывать протяженность цели лучевой терапии по размеру, параллельному проекционному углу.
7. Реализуемый на компьютере способ по п.1, причем проекционные углы охватывают дугу, вращающуюся вокруг заданной центральной оси.
8. Реализуемый на компьютере способ по п.1, содержащий:
определение фазы участка физиологического цикла, соответствующего конкретным 2D-изображениям; и
назначение конкретных 2D-изображений бинам с использованием информации, указывающей определенную фазу.
9. Реализуемый на компьютере способ по п.1, содержащий:
определение амплитуды участка физиологического цикла, соответствующего конкретным 2D-изображениям; и
назначение конкретных 2D-изображений бинам с использованием информации, указывающей определенную амплитуду.
10. Реализуемый на компьютере способ по п.1, причем одну или более из фазы или амплитуды участка физиологического цикла, соответствующего конкретным 2D-изображениям, определяют с использованием признака, извлеченного из конкретных 2D-изображений.
11. Реализуемый на компьютере способ по п.10, причем извлеченный признак соответствует диафрагме визуализируемого субъекта.
12. Реализуемый на компьютере способ по п.1, причем назначение конкретных 2D-изображений бинам включает в себя использование уменьшения размерности полученной информации о визуализации.
13. Реализуемый на компьютере способ по п.1, причем назначение конкретных 2D-изображений бинам включает в себя использование преобразования Фурье конкретных 2D-изображений.
14. Реализуемый на компьютере способ по п.1, причем построение 3D-изображения из полученных проекционных 2D-изображений включает в себя использование метода томографической реконструкции изображения.
15. Реализуемый на компьютере способ по п.1, причем построение 3D-изображения из полученных проекционных 2D-изображений включает в себя выполнение построения 3D-изображения с использованием преобразованной информации о визуализации, представленной в Фурье-пространстве.
16. Реализуемый на компьютере способ по п.1, причем построение 3D-изображения из полученных проекционных 2D-изображений включает в себя выполнение построения 3D-изображения с использованием метода фильтрованной обратной проекции.
17. Реализуемый на компьютере способ по п.1, причем построение 3D-изображения из полученных проекционных 2D-изображений включает в себя выполнение построения 3D-изображения с использованием метода сжатого считывания.
18. Реализуемый на компьютере способ по п.1, причем построение 3D-изображения из полученных проекционных 2D-изображений включает в себя выполнение построения 3D-изображения с использованием построения Фельдмана-Дависа-Кресса.
19. Реализуемый на компьютере способ по п.1, причем построение 3D-изображения из полученных проекционных 2D-изображений включает в себя выполнение построения 3D-изображения с использованием итеративного подхода.
20. Реализуемый на компьютере способ по любому из пп.1-19, содержащий обеспечение информации о 4D-визуализации для использования при создании или адаптации плана лечения лучевой терапией.
21. Реализуемый на компьютере способ по п.1, содержащий использование информации о 4D-визуализации для назначения или определения положения пациента перед доставкой фракции лечения лучевой терапией.
22. Реализуемый на компьютере способ генерирования информации о четырехмерной (4D) визуализации, представляющей физиологический цикл субъекта, содержащий:
генерирование двух или более двумерных (2D) изображений, причем 2D-изображения содержат проекционные изображения, представляющие разные проекционные углы, а 2D-изображения генерируют с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR);
назначение конкретных 2D-изображений бинам по меньшей мере частично с использованием информации, указывающей временные положения в физиологическом цикле, соответствующие конкретным 2D-изображениям;
построение трехмерных (3D) изображений с использованием сгруппированных по бинам 2D-изображений; и
построение информации о 4D-визуализации, содержащее объединение 3D-изображений;
причем физиологический цикл содержит дыхательный цикл;
причем получение двух или более 2D-изображений содержит получение 2D-изображений, представляющих разные проекционные углы, в течение длительности времени, охватывающей многочисленные дыхательные циклы; и
причем одну или более из фазы или амплитуды участка физиологического цикла, соответствующего конкретным 2D-изображениям, определяют с использованием признака, извлеченного из конкретных 2D-изображений.
23. Система визуализации, содержащая:
по меньшей мере одну процессорную схему и считываемый процессором носитель данных, причем считываемый процессором носитель данных включает в себя инструкции, которые, будучи исполняемыми процессорной схемой, вызывают генерирование процессорной схемой информации о четырехмерной (4D) визуализации, представляющей физиологический цикл субъекта, включающий в себя:
генерирование двух или более двумерных (2D) изображений, причем 2D-изображения содержат проекционные изображения, представляющие разные проекционные углы, и 2D-изображения генерируются с использованием информации о визуализации, полученной посредством визуализации методом ядерного магнитного резонанса (MR);
назначение конкретных 2D-изображений бинам по меньшей мере частично с использованием информации, указывающей временные положения в физиологическом цикле, соответствующие конкретным 2D-изображениям;
построение трехмерных (3D) изображений с использованием сгруппированных по бинам 2D-изображений; и
построение информации о 4D-визуализации, содержащее объединение 3D-изображений.
| US 20070159174A1, 12.07.2007 | |||
| US 20120245453A1, 27.09.2012 | |||
| Способ изготовления положительного электрода из порошкообразной хлористой меди | 1958 |
|
SU114901A1 |
| US 20140296702A1, 02.10.2014 | |||
| US 20130197347A1, 01.08.2013 | |||
| СПОСОБ ИССЛЕДОВАНИЯ ОРГАНОВ ГРУДНОЙ И/ИЛИ БРЮШНОЙ ПОЛОСТИ МЕТОДОМ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2007 |
|
RU2355305C1 |

