Нижеследующее относится, в целом, к магнитно-резонансному (МР) формированию изображения. Оно находит конкретное применение совместно с МР-наведением и будет описано с конкретной ссылкой на него. Однако следует понимать, что оно также находит применение в других сценариях использование и не обязано ограничиваться вышеупомянутым применением.
Доступность интерактивного МР формирования изображения в реальном времени и MR-кондийионных инструментов привела к увеличению использования МР-наведения, особенно в чрескожных процедурах, осуществляемых трубкой или иглой, например линейных абляционных пробах. Помимо отсутствия ионизирующего излучения, МР-наведение обеспечивает ряд преимуществ над компьютерно-томографическим (КТ)-наведением и ультразвуковым (УЗ)-наведением для таких процедур. Некоторые из более важных преимуществ включают в себя контрастность мягких тканей и полную томографическую способность МР.
Традиционные клинические чрескожные вмешательства с МР-наведением используют предоперационные трехмерные (3D) МР-изображения для планирования траектории трубки или иглы. Затем направляющие стереотаксического устройства используются для выравнивания трубки или иглы с целью и для направления ее введения, которое, в основном, осуществляется вне МР-томографа. Наконец, МР используется для подтверждения, что трубка или игла достигла цели.
Поскольку стереотаксические процедуры подвержены ошибкам совмещения из-за движения пациента, движения органов и изгибания иглы, и поскольку такие процедуры предусматривают сложную последовательность операций (например, перемещение пациента в МР-томограф и из него), в некоторых медицинских центрах в настоящее время не практикуются так называемые процедуры без участия рук, в которых трубка или игла продвигается без какой-либо физической направляющей стереотаксического устройства при МР-наведении в реальном времени. Этому способствуют специализированные МР последовательности, которые визуализируют цель и трубку или иглу с высокой видимостью, и доступность открытых МР систем, хотя описанный подход не ограничивается этими системами с открытым каналом.
Например, в типичном подходе к биопсии печени, субъект располагается в открытом МР-томографе и готов к печеночному вмешательству. Точку ввода интервенционного инструмента можно помечать на коже пациента. Затем врач-специалист по инвазивным процедурам продвигает трубку или иглу в субъект при МР-наведении в реальном времени.
Обычно, последовательность операций процедуры без участия рук включает в себя идентификацию цели в диагностических МР-изображениях. Затем траектория трубки или иглы планируется с использованием диагностических МР-изображений, и два перпендикулярных среза МР формирование изображения в реальном времени выбираются таким образом, чтобы запланированная траектория совпадала с поперечным сечением срезов формирования изображения. Для операций на печени обычно выбираются паратрансверсальный и паракорональный срезы. После этого, трубка или игла выравнивается с запланированной траекторией вне субъекта и затем вводится вдоль запланированной траектории при МР-наведении в реальном времени. Повторная тонкая регулировка позиций срезов в реальном времени осуществляется в ходе введения иглы.
Этапы идентификации, планирования и выбора обычно осуществляются с пульта, и остальные этапы обычно осуществляются врачом-специалистом по инвазивным процедурам с МР-томографа. Известная процедура для осуществления этих остальных этапов состоит в использовании одного или более активных маркеров для измерения ориентации трубки или иглы с помощью последовательности слежения, которая может перемежаться с последовательностью формирования изображения. Однако проблемы с этой процедурой включают в себя интуитивно непонятную визуализацию геометрий трубки или иглы и плоскостей срезов, и интуитивно непонятное взаимодействие для регулировки срезов.
Что касается визуализации геометрий трубки или иглы и плоскостей срезов, врач-специалист по инвазивным процедурам наклоняется к МР-томографу и манипулирует трубкой или иглой одной рукой, возможно касаясь и/или разглаживая кожу субъекта другой рукой. Таким образом, врачу-специалисту по инвазивным процедурам приходится наклонять голову, что создает дискомфорт для врача-специалиста по инвазивным процедурам. Дополнительно, когда врач-специалист по инвазивным процедурам хочет выровнять игла с запланированной траекторией вне субъекта, ему нужно постоянно смотреть то на трубку или иглу, то на устройство отображения, которое располагается позади МР-томографа и которое отображает МР-изображения в реальном времени и, возможно, модель иглы в отношении предоперационных 3D данных, включающих в себя цель. Более того, врач-специалист по инвазивным процедурам должен мысленно совершать перевод между визуальными координатами на трубке или игле и устройстве отображения. Итак, согласно вышеизложенному, требуется опытный врач-специалист по инвазивным процедурам с развитым пространственным воображением.
Что касается взаимодействия для регулировки срезов, врач-специалист по инвазивным процедурам отслеживает пассивную контрастность трубки или иглы или отслеживает модель трубки или иглы на основании позиций маркеров и поражения цели на устройстве отображения, выбирая и регулируя позиции срезов, что в настоящее время делается с использованием тройной ножной педали. Одиночные и двойные нажатия на каждую педаль применяются для выбора, сдвига, поворота и наклона срезов. Врачу-специалисту по инвазивным процедурам также требуется представлять себе позиции срезов, трубки или иглы и цели в 3D, что связано с кривой обучения и дополнительной концентрацией.
Ниже представлены новые и усовершенствованные система и способ, призванные решать вышеупомянутые и другие проблемы.
В соответствии с одним аспектом, предусмотрена магнитно-резонансная (МР) система для наведения трубки или иглы на цель субъекта. Система включает в себя пользовательский интерфейс. Пользовательский интерфейс включает в себя рамку, расположенную на поверхности субъекта. Рамка включает в себя отверстие поверх точки ввода запланированной траектории для трубки или иглы. Запланированная траектория проходит от точки ввода к цели. Пользовательский интерфейс дополнительно включает в себя по меньшей мере один из: 1) одного или более визуальных индикаторов, размещенных на рамке вокруг отверстия; и 2) одного или более устройств пользовательского ввода, размещенных на рамке вокруг отверстия. Один или более визуальных индикаторов предназначен для по меньшей мере одного из: 1) визуального указания отклонения трубки или иглы от запланированной траектории; и 2) визуального указания текущей позиции среза в реальном времени МР-изображений в реальном времени. Устройства пользовательского ввода избирательно регулирует текущую позицию среза в реальном времени.
В соответствии с другим аспектом, предусмотрен способ магнитно-резонансного (МР) наведения трубки или иглы на цель субъекта. Способ включает в себя по меньшей мере один из этапов: 1) визуального указания, как выравнивать трубку или иглу с запланированной траекторией; и 2) визуального указания текущей позиции среза в реальном времени МР-изображений в реальном времени. Упомянутое визуальное указание, как выравнивать трубку или иглу с запланированной траекторией, включает в себя определение текущей траектории трубки или иглы. Запланированная траектория сравнивается с текущей траекторией для определения, как выравнивать трубку или иглу с запланированной траекторией. Запланированная траектория проходит от точки ввода субъекта к цели. Визуальная индикация для выравнивания трубки или иглы с запланированной траекторией генерируется с использованием пользовательского интерфейса. Пользовательский интерфейс располагается на поверхности субъекта и включает в себя отверстие поверх точки ввода. Упомянутое визуальное указание текущей позиции среза в реальном времени МР-изображений в реальном времени включает в себя отображение соответствующего МР-изображения в реальном времени на устройстве отображения. Визуальная индикация текущей позиции среза в реальном времени генерируется с использованием пользовательского интерфейса. Один или более источников света пользовательского интерфейса указывают, где плоскость среза в реальном времени пересекает рамку.
В соответствии с другим аспектом, предусмотрено устройство, функционирующее совместно с интервенционным инструментом, обеспечивающим формирование изображения в реальном времени для наведения трубки или иглы на цель субъекта. Устройство включает в себя рамку, расположенную на поверхности субъекта. Рамка включает в себя отверстие поверх точки ввода запланированной траектории для трубки или иглы, проходящей от точки ввода к цели. Рамка дополнительно включает в себя один или более визуальных индикаторов, размещенных на рамке вокруг отверстия. Устройство дополнительно включает в себя по меньшей мере один процессор, запрограммированный оперировать одним или более визуальными индикаторами на рамке для визуального указания по меньшей мере одного из: (i) текущей позиции среза формирования изображения в реальном времени; и (ii) отклонения текущей позиции трубки или иглы от запланированной траектории.
Одно преимущество состоит в интуитивно понятной визуализации геометрий отклонения текущей позиции трубки или иглы от запланированной траектории и плоскостей срезов.
Другое преимущество состоит в интуитивно понятном взаимодействии для регулировки срезов.
Прочие преимущества настоящего изобретения будут понятны специалистам в данной области техники по ознакомлении с нижеследующим подробным описанием.
Изобретение может быть реализовано в различных компонентах и компоновках компонентов и в различных этапах и компоновках этапов. Чертежи приведены только в целях иллюстрации предпочтительных вариантов осуществления и не призваны ограничивать изобретение.
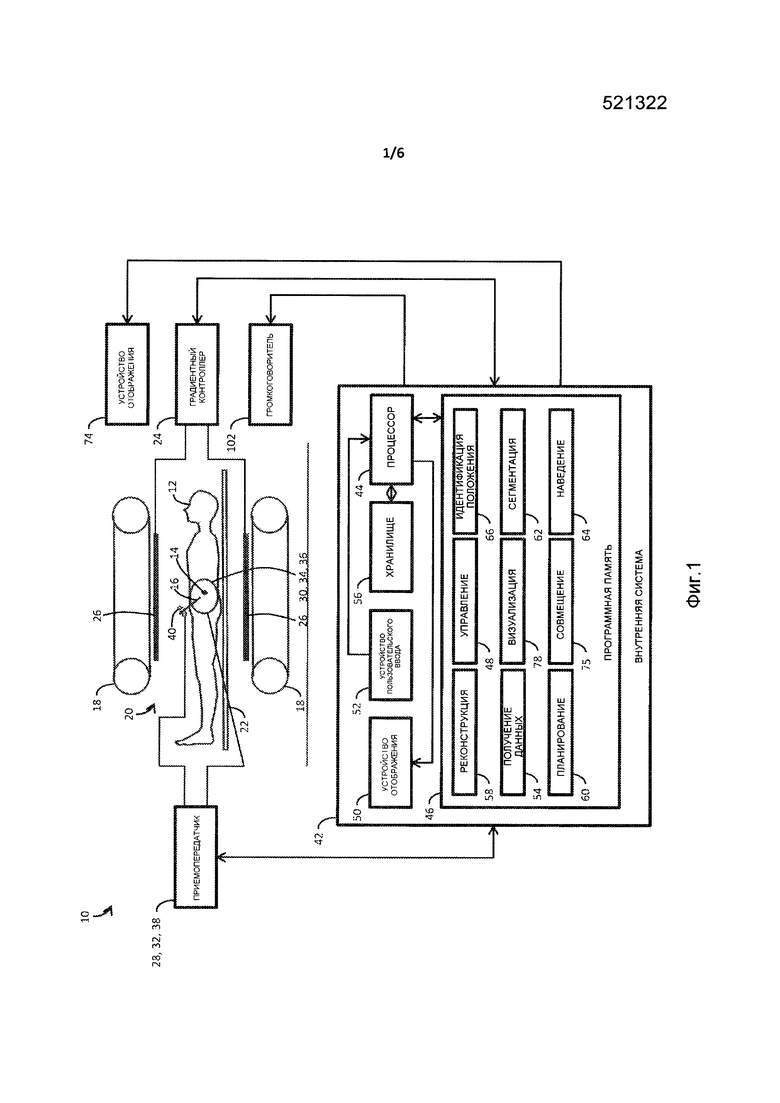
Фиг. 1 демонстрирует МР-систему для МР-наведения.
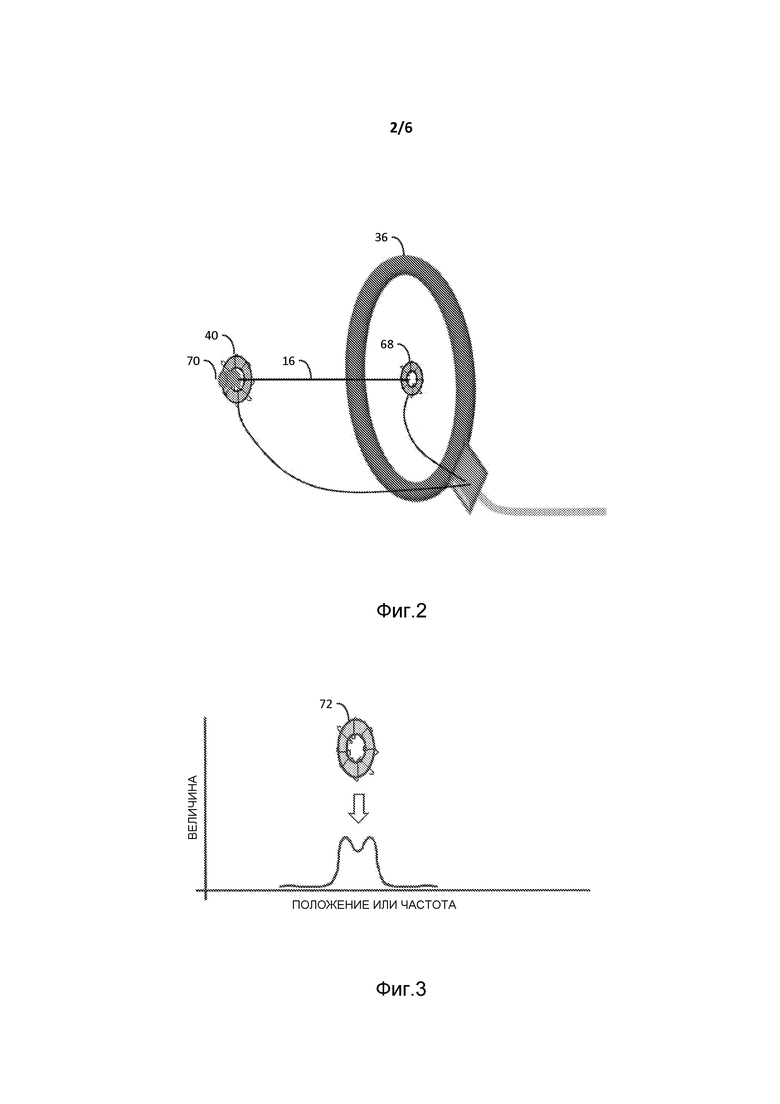
Фиг. 2 демонстрирует компоновку МР-маркеров для определения положения трубки или иглы.
Фиг. 3 демонстрирует пример, как идентифицировать положение трубки или иглы с использованием МР-маркера.
Фиг. 4A демонстрирует срез МР-изображения в реальном времени субъекта до введения трубки или иглы в субъект.
Фиг. 4B демонстрирует другой срез МР-изображения в реальном времени, представленного на фиг.4A.
Фиг. 4C демонстрирует срез МР-изображения в реальном времени субъекта после введения трубки или иглы в субъект.
Фиг. 4D демонстрирует другой срез МР-изображения в реальном времени, представленного на фиг.4C.
Фиг. 5 демонстрирует размещение трубки или иглы с использованием пользовательского интерфейса для МР-наведения.
Фиг. 6 демонстрирует размещение трубки или иглы с использованием пользовательского интерфейса для МР-наведения.
Фиг. 7 демонстрирует размещение трубки или иглы с использованием пользовательского интерфейса для МР-наведения, где точка ввода не располагается в центре круговой компоновки.
Фиг. 8 демонстрирует отображение позиции среза с использованием пользовательского интерфейса для МР-наведения.
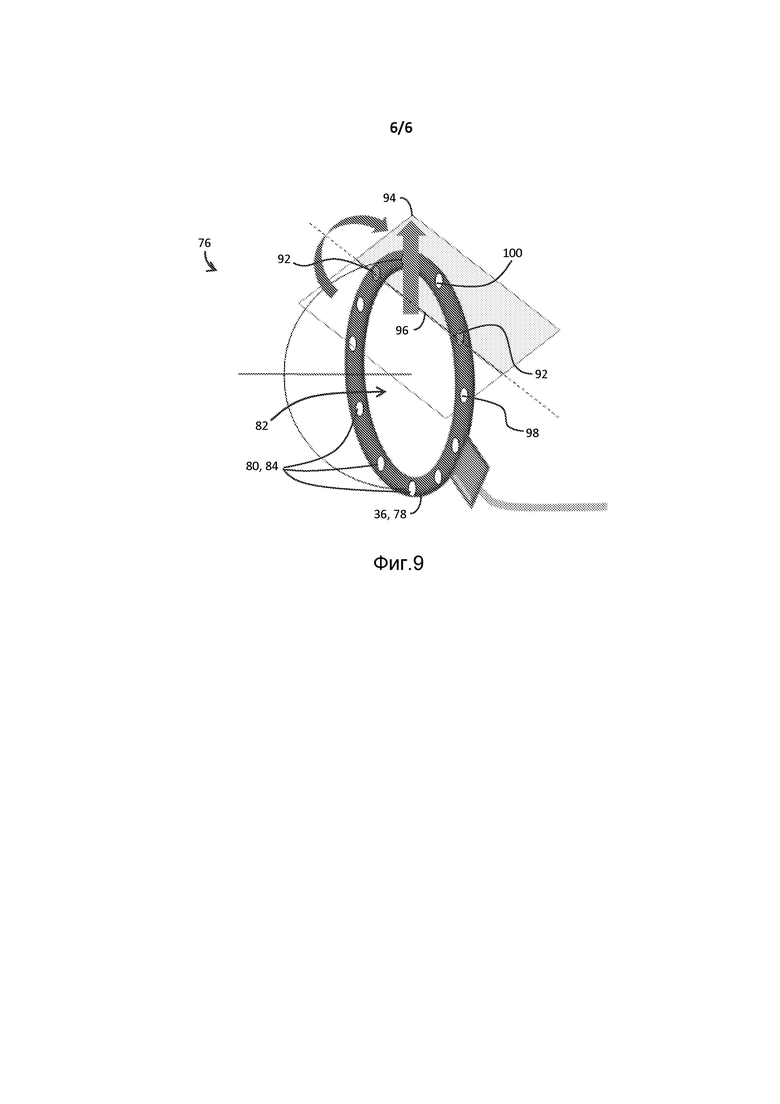
Фиг. 9 демонстрирует вращение и сдвиг среза с использованием пользовательского интерфейса для МР-наведения.
Согласно фиг. 1, магнитно-резонансная (МР) система 10 использует МР для формирования двух- и/или трехмерных МР-изображений цели 14 в субъекте 12 и МР для наведения трубки или иглы 16 на цель 14. Целью 14 является, например, поражение, например опухоль. Главный магнит 18 создает сильное статическое магнитное поле B0, проходящее через объем 20 обследования. Объем 20 обследования имеет размеры, позволяющие вмещать субъект 12, который располагается в объеме 20 обследования в ходе формирования изображения и наведения трубки или иглы 16. Необязательная опора 22 поддерживает субъект 12 и облегчает размещение субъекта 12 в объеме 20 обследования.
Для создания статического магнитного поля B0 в главном магните 18 обычно используются сверхпроводящие катушки. Однако в главном магните 18 также можно использовать постоянные или резистивные магниты. Постольку-поскольку используются сверхпроводящие катушки, главный магнит 18 включает в себя систему охлаждения, например, криостат, охлаждаемый жидким гелием, для сверхпроводящих катушек. Напряженность статического магнитного поля B0 обычно составляет одно из 0,23 Тл, 0,5 Тл, 1,5 Тл, 3 Тл, 7 Тл и т.д. в объеме 20 обследования, но возможности и другие значения напряженности.
Как показано, главный магнит 20 относится к открытому типу и включает в себя две сверхпроводящие катушки, разнесенные для задания объема 20 обследования. Сверхпроводящие катушки создают статическое магнитное поле B0 аналогично катушке Гельмгольца. Преимущество открытого магнита в том, что он обеспечивает легкий доступ к субъекту 12. Однако можно использовать и другие типы главных магнитов. Например, можно применять разрезной цилиндрический главный магнит и/или цилиндрический главный магнит. Разрезной цилиндрический главный магнит аналогичен цилиндрическому главному магниту, который включает в себя криостат, за исключением того, что криостат разрезан на две секции, что позволяет осуществлять доступ к изоплоскости магнита. Кроме того, можно использовать интервенционный инструмент, отличный от МР-томографа, для генерации изображений в реальном времени и отслеживания трубки или иглы 16, например компьютерный томограф (КТ).
В иллюстративном случае МР-томографа, градиентный контроллер 24 управляется для наложения градиентов магнитного поля, например, градиентов x, y и z, на статическое магнитное поле B0 в объеме 20 обследования с использованием множества катушек 26 градиента магнитного поля. Градиенты магнитного поля пространственно кодируют магнитные спины в объеме 20 обследования. Обычно множество катушек 26 градиента магнитного поля включают в себя три отдельные катушки градиента магнитного поля, пространственно кодирующие в трех ортогональных пространственных направлениях.
Один или более передатчиков 28, например приемопередатчик, управляются для передачи возбуждения резонанса B1 и манипуляционных радиочастотных (РЧ) импульсов в объем 20 обследования с помощью одной или более передающих катушек 30, например, одной или более из катушки всего тела, поверхностной катушки и катушки МР-маркера. МР-маркер представляет собой сигнальный объем, окруженный катушкой. Импульсы B1 обычно имеют малую длительность и, при использовании совместно с градиентами магнитного поля, достигают выбранной манипуляции магнитного резонанса. Например, импульсы B1 возбуждают резонанс в диполях водорода, и градиенты магнитного поля кодируют пространственную информацию в частоте и фазе резонансного сигнала.
Один или более приемников 32, например приемопередатчик, управляются для приема пространственно кодированных магнитно-резонансных сигналов из объема 20 обследования и демодуляции принятых пространственно кодированных магнитно-резонансных сигналов в МР-данные. Для приема пространственно кодированных магнитно-резонансных сигналов приемники 32 используют одну или более приемных катушек 34, например, одну или более из катушки всего тела, поверхностной катушки и катушки МР-маркера. Приемники 32 обычно сохраняют МР-данные в буферной памяти.
Как показано, передающие катушки 30 и приемные катушки 34 включают в себя поверхностную катушку 36, расположенную на поверхности субъекта 12. Поверхностная катушка 36 используется одновременно как передающая катушка и приемная катушка. Однако очевидно, что поверхностную катушку 36 можно применять в качестве только одной из передающей катушки и приемной катушки. Аналогично, приемники 28 и передатчики 32 включают в себя приемопередатчик 38, который используется для передачи и приема. Однако очевидно, что приемопередатчик 38 можно применять в качестве только одного из передатчика и приемника.
Дополнительно, как показано, передающие катушки 30 и/или приемные катушки 34 включают в себя катушку МР-маркера 40. Форма сигнального объема и катушки МР-маркера 40 адаптирована для определения точки на трубке или игле 16 или точки на субъекте 12, где нужно разместить трубку или иглу 16 без необходимости в удалении маркера 40. В проиллюстрированном варианте осуществления катушка обвивается вокруг тороидального сигнального объема МР-маркера 40, и МР-маркер 40 устанавливается на трубке или игле 16, причем трубка или игла 16 проходит через центр тороидального сигнального объема. Как рассмотрено ниже, МР-маркер 40 можно использовать для определения положения трубки или иглы 16 или положения точки ввода иглы на субъекте.
Внутренняя система 42 (например, компьютер или другое электронное устройство обработки данных) координирует генерацию двух- или трехмерных МР-изображений цели 14 и наведение трубки или иглы 16 на цель 14. Внутренняя система 42 включает в себя по меньшей мере один электронный процессор 44 (например, микропроцессор, микроконтроллер и т.д.) и по меньшей мере одну программную память 46. Программная память 46 включает в себя процессорно-исполнимые инструкции, которые при выполнении процессором 44 координируют генерацию и наведение. Процессор 44 выполняет процессорно-исполнимые инструкции для координации генерации и наведения. В некоторых вариантах осуществления внутренняя система 42 реализована как компьютер, выполняющий программу, хранящуюся в программной памяти (т.е. на нетранзиторном носителе данных), воплощенной в виде жесткого диска или другого магнитного носителя данных, или оптического диска или другого оптического носителя данных, или оперативной памяти (ОЗУ), постоянной памяти (ПЗУ), или другого электронного носителя данных, различных их комбинаций и т.д.
Модуль 48 управления процессорно-исполнимых инструкций управляет работой внутренней системы 42 в целом. Модуль 48 управления надлежащим образом отображает графический пользовательский интерфейс (ГИП) пользователю внутренней системы 42 с использованием устройства 50 отображения внутренней системы 42. Дополнительно, модуль 48 управления надлежащим образом позволяет пользователю взаимодействовать с ГИП с использованием устройства 52 пользовательского ввода внутренней системы 42. Например, пользователь может взаимодействовать с ГИП, чтобы предписывать внутренней системы 42 координировать генерацию и/или наведение.
Для генерации МР-изображения цели 14, модуль 54 получения данных процессорно-исполнимых инструкций получает МР-данные цели 14. Модуль 54 получения данных управляет передатчиками 28 и/или градиентным контроллером 24 для реализации одной или более последовательностей формирования изображения в объеме 20 обследования. Последовательность формирования изображения задает последовательность импульсов и/или градиентов магнитного поля B1, которые создают пространственно кодированные МР-сигналы из объема 20 обследования. Дополнительно, модуль 54 получения данных управляет приемниками 32 для получения пространственно кодированных МР-сигналов в качестве МР-данных. МР-данные обычно хранятся в по меньшей мере одном запоминающем устройстве 56 внутренней системы 42. После получения МР-данных модуль 58 реконструкции процессорно-исполнимых инструкций реконструирует МР-данные в МР-изображение цели 14. МР-изображение обычно хранятся в запоминающем устройстве 56.
Для наведения трубки или иглы 16 модуль 60 планирования процессорно-исполнимых инструкций генерирует одно или более диагностических МР-изображений цели 14, как описано выше. Затем траектория трубки или иглы 16 планируется на диагностических МР-изображениях из точки ввода на поверхности субъекта 12 к цели 14. Цель 14 и точку ввода можно идентифицировать в диагностических МР-изображениях с использованием модуля сегментации 62 процессорно-исполнимых инструкций. Модуль сегментации 62 может осуществлять идентификацию автоматически и/или вручную. В первом случае, можно применять любое количество известных алгоритмов сегментации. Во втором случае, диагностические МР-изображения отображаются на ГИП и пользователь идентифицирует цель 14 и/или точку ввода в диагностических МР-изображениях.
После планирования модуль 64 наведения процессорно-исполнимых инструкций определяет текущее положение трубки или иглы 16 в реальном времени с использованием модуля 66 идентификации положения процессорно-исполнимых инструкций. Модуль 66 идентификации положения использует подход на основе изображений или подход не на основе изображений для определения положения трубки или иглы 16. В первом случае, МР-изображения в реальном времени цели 14, рассмотренные ниже, анализируются для идентификации текущего положения трубки или иглы 16. Например, трубка или игла 16 может быть выполнена из материала, легко обнаружимого в МР-изображениях в реальном времени и/или модуль сегментации 62 можно применять для идентификации трубки или иглы 16 в МР-изображениях в реальном времени. Во втором случае, можно применять фидуциальные маркеры, например, электромагнитные приемоответчики или МР-маркеры. МР-маркер представляет собой сигнальный объем, окруженный катушкой.
Согласно фиг.2, в соответствии с тем, что показано на фиг. 1, МР-маркер 40 используется в качестве маркера МР-наведения. Дополнительно, необязательный кожный МР-маркер 68 прилепляется к поверхности субъекта 12 с открытым центром, расположенным поверх запланированной точки ввода. Затем трубку или иглу 16 можно вводить в субъект 12 через кожный МР-маркер 68. Маркер 40 МР-наведения, в необязательном порядке, может быть снабжен источниками света, например светодиодами (СИД) белого свечения, для освещения вдоль оси трубки или иглы 16. Если маркер 40 МР-наведения имеет малый диаметр, это возможно только, если пальцы находятся вблизи маркера 40 МР-наведения (например, на канюле 70 трубки или иглы 16), поскольку в противном случае происходит затенение.
Для определения положения трубки или иглы 16 с использованием МР-маркеров 40, 68, модуль 66 идентификации положения использует модуль 54 получения данных для получения МР-данных положения с использованием МР-маркеров 40, 68 в качестве приемных катушек. Модуль 54 получения данных управляет передатчиками 28 и/или градиентным контроллером 24 для реализации одной или более последовательностей слежения с использованием МР-маркеров 40, 68. Последовательность слежения задает последовательность импульсов и/или градиентов магнитного поля B1, которые создают пространственно кодированные МР-сигналы из объема 20 обследования. Последовательности слежения могут перемежаться одной или более последовательностями формирования изображения. Дополнительно, модуль 54 получения данных управляет приемниками 32 для получения пространственно кодированных МР-сигналов в качестве МР-данных положения. Затем модуль 66 идентификации положения обрабатывает МР-данные положения для определения положения трубки или иглы 16 и точки ввода иглы.
На фиг. 3 приведен пример, как идентифицировать положение МР-маркера 72, например, маркера 40 МР-наведения или кожного МР-маркера 68, с использованием методов одномерного градиента. Градиент применяется в конкретном направлении, и МР-сигналы измеряются с использованием МР-маркера 72 в ответ на импульсы B1. Затем строится результирующая кривая, где ось у соответствует величине сигнала и ось х соответствует положению или частоте. Поскольку используется единственное градиентное поле, частота соответствует положению. Провал на кривой соответствует положению МР-маркера 72. Использование кожного МР-маркера 68 преимущественно обеспечивает некоторое "встроенное" пространственное совмещение между трубкой или иглой 16 и пациентом; однако кожный МР-маркер 68 в необязательном порядке заменяется маркером, расположенным во втором положении на трубке или игле 16 (т.е. второе положение отличается от положения маркера 40 МР-наведения). Если интервенционный инструмент отличается от MP-томографа, то маркеры следует выбирать так, чтобы их можно было обнаруживать с помощью этого другого интервенционного инструмента.
Согласно фиг. 1, модуль 64 наведения дополнительно генерирует MP-изображения цели 14, как описано выше, в реальном времени. Надлежащим образом, одна или более последовательностей формирования изображения, используемых для генерации МР-изображений в реальном времени отличаются от одной или более последовательностей формирования изображения, используемых для генерации диагностических МР-изображений. MP-изображения в реальном времени отображаются в реальном времени врачу-специалисту по инвазивным процедурам на устройстве 74 отображения, расположенном вблизи субъекта 12. При отображении МР-изображений в реальном времени отображается один или более срезов МР-изображений в реальном времени, например два почти перпендикулярных среза, которые пересекают запланированную траекторию. Например, для операций на печени обычно отображаются паратрансверсальный и паракорональный срезы. Отображаемые срезы надлежащим образом кодируются цветом таким образом, что каждому срезу присваивается цвет.
MP-изображения в реальном времени надлежащим образом отображаются таким образом, что положение запланированной траектории накладывается на MP-изображения в реальном времени. Модуль 75 совмещения процессорно-исполнимых инструкций надлежащим образом применяется для преобразования положения запланированной траектории в систему координат МР-изображений в реальном времени. Дополнительно, модуль 78 визуализации процессорно-исполнимых инструкций надлежащим образом применяется для наложения представления запланированной траектории, например, линии, на МР-изображения в реальном времени.
На фиг. 4A-D показаны срезы МР-изображений в реальном времени, которые могут отображаться врачу-специалисту по инвазивным процедурам на устройстве 74 отображения. Фиг. 4A и 5B демонстрируют два почти перпендикулярных среза МР-изображения в реальном времени, полученные в ходе печеночного вмешательства. Запланированная траектория трубки или иглы 16 изображена в виде линии, проходящей от точки ввода на коже к цели 14. Фиг. 4C и 4D демонстрируют два почти перпендикулярных среза другого МР-изображения в реальном времени после введения трубки или иглы 16 в субъект 12.
Согласно фиг. 1 и с дополнительной ссылкой на фиг. 5-9, модуль 64 наведения использует пользовательский интерфейс 76, чтобы врач-специалист по инвазивным процедурам мог интуитивно регулировать срезы изображений в реальном времени, отображаемые на устройстве 74 отображения, а также интуитивно визуализировать геометрии трубки или иглы 16 по отношению к запланированной траектории и плоскостям срезов. Как показано на фиг. 5, пользовательский интерфейс 76 объединен с поверхностной катушкой 36 и/или прикреплен к ней. Однако очевидно, что поверхностная катушка 36 не требуется, благодаря чему пользовательский интерфейс можно применять независимо от поверхностной катушки 36.
Пользовательский интерфейс 76 включает в себя рамку 78 и множество визуальных индикаторов 80, например, СИД или другие источники света, элементы ЖКД или кольцевой ЖК-дисплей, и т.д., в необязательном порядке включающие в себя возможности сенсорного экрана, прикрепленных к рамке 78. Иллюстративные визуальные индикаторы 80 являются источниками 80 света (например, СИД). Источники 80 света располагаются вокруг отверстия 82 рамки 78, которая может иметь, например, форму кольца. Для простоты рассмотрения предлагается, что источники 80 света размещены по окружности вокруг отверстия 82. Однако специалистам в данной области техники очевидно, что возможны и другие формы, например квадратная, прямоугольная, овальная и т.д. Обычно источники 80 света включают в себя 36 источников света и/или освещают к центру отверстия 82. Надлежащие щитки для блокировки прямого света могут предотвращать ослепление врача-специалиста по инвазивным процедурам. Пользовательский интерфейс 76 дополнительно включает в себя множество устройств 84 пользовательского ввода, например, кнопок или сенсорных экранов (например, по одному для каждого из источников 80 света). Устройства 84 пользовательского ввода объединены с (как показано) соответствующими источниками света на рамке 78 или расположены вблизи них.
В альтернативном варианте осуществления, единое устройство отображения на основе сенсорного экрана, например, кольцеобразная деталь сенсорного экрана, заменяет источники 80 света и устройства 84 пользовательского ввода. Это преимущественно уводит от умеренного характер вышеописанных вариантов осуществления и, таким образом, обеспечивает еще более точное или изощренное средство для наведения и манипуляции.
В ходе наведения врач-специалист по инвазивным процедурам размещает пользовательский интерфейс 76 на поверхности субъекта 12, где отверстие 82 рамки 78 располагается поверх запланированной точки ввода для трубки или иглы 16. Врач-специалист по инвазивным процедурам дополнительно размещает кончик трубки или иглы 16 в точке ввода. Врач-специалист по инвазивным процедурам может определять точку ввода, отслеживая МР-изображения в реальном времени на устройстве 74 отображения. Например, конечность, например палец, перемещается в поле зрения МР-изображений в реальном времени и к точке ввода, показанной на МР-изображениях в реальном времени, как показано на фиг. 4A и 4B. Альтернативно, две пары источников света можно использовать для обеспечения положения запланированной точки ввода на субъекте 12 врачу-специалисту по инвазивным процедурам. Первая пара источников света светится первым цветом, где два источника света задают первую линию на поверхности субъекта 12. Вторая пара источников света светится вторым цветом, где два источника света задают вторую линию на поверхности субъекта 12. Источники света выбираются таким образом, что пересечение первой и второй линий отмечает запланированную точку ввода на субъекте.
Используя запланированную траекторию, модуль 64 наведения вычисляет углы  и
и  цели для запланированной траектории в полярной системе координат. Система координат центрирована в точке ввода, которая, в необязательном порядке, может совпадать с центром круговой компоновки источников 80 света. Плоскость θ=π системы координат задается плоскостью круговой компоновки источников 80 света. Дополнительно, используя текущее положение трубки или иглы 16, модуль 64 наведения вычисляет углы φ и θ для трубки или иглы 16 в полярных координатах. Углы φ и θ трубки или иглы 16 проиллюстрированы на фиг. 5-7.
цели для запланированной траектории в полярной системе координат. Система координат центрирована в точке ввода, которая, в необязательном порядке, может совпадать с центром круговой компоновки источников 80 света. Плоскость θ=π системы координат задается плоскостью круговой компоновки источников 80 света. Дополнительно, используя текущее положение трубки или иглы 16, модуль 64 наведения вычисляет углы φ и θ для трубки или иглы 16 в полярных координатах. Углы φ и θ трубки или иглы 16 проиллюстрированы на фиг. 5-7.
Для вычисления углов определяется положение пользовательского интерфейса 76 на субъекте 12. Когда пользовательский интерфейс 76 объединен с поверхностной катушкой 36 и/или прикреплен к ней, позицию пользовательского интерфейса 76 можно определять с использованием контрольного сканирования, например, контрольного сканирования SENSE. Контрольное сканирование представляет собой трехмерное сканирование низкого разрешения с широким полем зрения (FOV). Модуль 54 получения данных надлежащим образом применяется для осуществления контрольного сканирования. Он управляет передатчиками 28 и/или градиентным контроллером 24 согласно одной или более последовательностей формирования изображения контрольного сканирования. Дополнительно, модуль 54 получения данных управляет приемниками 32 для получения пространственно кодированных МР-сигналов, как от приемной катушки всего тела, так и от поверхностной катушки 36. Затем модуль 58 реконструкции применяется для генерации МР-изображения величин из отношения обоих сигналов, которое соответствует профилю чувствительности поверхностной катушки 36.
Затем модуль 64 наведения может использовать изображение величины для определения положения поверхностной катушки 36, поскольку величина максимальна вблизи выводов катушки. Это определение может осуществляться путем подгонки модели поверхностной катушки 36 к максимуму изображения величины с помощью подходящей функции стоимости. Когда поверхностная катушка 36 является круглой, требуется три параметра поступательной подгонки и три параметра вращательной подгонки. Модель можно расширить посредством радиуса кривизны, если катушка изгибается, например, к малым субъектам. Если компоновка источников 80 света имеют некоторую зеркальную или вращательную симметрию, дополнительно требуется задавать точку отсчета на пользовательском интерфейсе 76, чтобы однозначно идентифицировать позицию источников 80 света.
Когда для определения положения трубки или иглы 16 используются маркер 40 МР-наведения и/или поверхностный МР-маркер 68, точку отсчета можно идентифицировать, фиксируя маркер 40 МР-наведения или, когда применимо, кожный МР-маркер 68 на одном из источников 80 света в ходе контрольного сканирования и инициирования соответствующего устройства пользовательского ввода. Затем модуль наведения 54 может оценивать позицию МР-маркера из контрольного сканирования для идентификации позиции инициированного устройства пользовательского ввода. Альтернативно, точку отсчета можно идентифицировать, фиксируя маркер 40 МР-наведения или, когда применимо, кожный МР-маркер 68 на одном из источников 80 света в ходе последовательности слежения и инициирования соответствующего устройства пользовательского ввода. Затем модуль наведения 54 может оценивать позицию МР-маркера из МР-данных для идентификации позиции инициированного устройства пользовательского ввода. В обоих случаях, можно избавиться от необходимости в инициировании соответствующего устройства пользовательского ввода, визуально помечая эталонный источник света и всегда помещая МР-маркер на этот источник света, определяя при этом точку отсчета.
На основании углов модуль 64 наведения регулирует источники 80 света для обеспечения визуальной индикации, нужно ли врачу-специалисту по инвазивным процедурам перемещать трубку или иглу 16 для выравнивания трубки или иглы 16 с запланированной траекторией. Дополнительно или альтернативно, источники 80 света обеспечивают визуальную индикацию отклонения текущей позиции трубки или иглы 16 (определяемого из локализации в реальном времени маркеров 40, 68) от запланированной траектории. Визуальные знаки врачу-специалисту по инвазивным процедурам можно делать путем изменения цвета, яркости или других подобных свойств источников 80 света. Визуальные знаки врачу-специалисту по инвазивным процедурам также можно делать путем мигания источников 80 света и изменения частоты, с которой мигают источники 80 света. Один подход к указанию выравнивания трубки или иглы 16 описан ниже.
Если на круговой компоновке предусмотрено лишь малое количество источников света, в общем случае, ни один из них не будет располагаться в точности под углом цели. В этом случае малого количества источников света, используется следующий подход, чтобы врач-специалист по инвазивным процедурам все же мог точно наводить трубку или иглу 16 на нужный угол цели. Подход использует два источника 90 света, слева и справа соседствующие с источником 86 света под углом . Они остаются темными, пока  . Если
. Если  , цвет того источника 90 света, который располагается под меньшим углом φ, задается желтым. Другой источник 90 света под большим углом φ отключается. Если
, цвет того источника 90 света, который располагается под меньшим углом φ, задается желтым. Другой источник 90 света под большим углом φ отключается. Если 
 , цвет того источника 90 света, который располагается под большим углом φ, задается желтым, и другой источник 90 света под меньшим углом φ отключается. Как аналогично описано выше для угла φ, источник 90 желтого света указывает, что врач-специалист по инвазивным процедурам должен перемещать трубку или иглу в направлении этого источника света для достижения . Когда врач-специалист по инвазивным процедурам перемещается на φ к , интенсивность источника 90 желтого света постепенно уменьшается до нуля. По существу, врач-специалист по инвазивным процедурам обнуляет яркость двух соседних источников 90 света, когда трубка или игла 16 входит под углом цели . Поскольку человеческий глаз может в точности определять нуль яркости, можно в точности достигать угла цели.
, цвет того источника 90 света, который располагается под большим углом φ, задается желтым, и другой источник 90 света под меньшим углом φ отключается. Как аналогично описано выше для угла φ, источник 90 желтого света указывает, что врач-специалист по инвазивным процедурам должен перемещать трубку или иглу в направлении этого источника света для достижения . Когда врач-специалист по инвазивным процедурам перемещается на φ к , интенсивность источника 90 желтого света постепенно уменьшается до нуля. По существу, врач-специалист по инвазивным процедурам обнуляет яркость двух соседних источников 90 света, когда трубка или игла 16 входит под углом цели . Поскольку человеческий глаз может в точности определять нуль яркости, можно в точности достигать угла цели.
Как показано на фиг. 5-7, угол θ трубки или иглы 16 отклоняется от выравнивания с углом запланированной траектории. На фиг. 5,  . Поэтому цвет источника 86 света, расположенного под углом , задается зеленым, и цвет противоположного источника 88 света отключается. На фиг. 6 и 7,
. Поэтому цвет источника 86 света, расположенного под углом , задается зеленым, и цвет противоположного источника 88 света отключается. На фиг. 6 и 7,  . Поэтому цвет источника 86 света, расположенного под углом , отключается, и цвет противоположного источника 88 света задается зеленым. Все остальные источники света можно задать белым для освещения сцены.
. Поэтому цвет источника 86 света, расположенного под углом , отключается, и цвет противоположного источника 88 света задается зеленым. Все остальные источники света можно задать белым для освещения сцены.
Когда  , цвет источника света, наиболее удаленного от источника света, расположенного под углом φ и соседствующего с источником 86 света, расположенным под углом задается белым. Другой источник света, который соседствует с источником 86 света, расположенным под углом , отключается. Когда , цвет источников 90 света, соседствующих с источником 86 света, расположенным под углом , отключаются. Источник белого света указывает, что врач-специалист по инвазивным процедурам должен перемещать трубку или иглу в направлении источника белого света. Когда врач-специалист по инвазивным процедурам перемещается на φ к , интенсивность источника белого света увеличивается до максимальной интенсивности. Когда врач-специалист по инвазивным процедурам перемещается на φ от , интенсивность источника белого света увеличивается до максимальной интенсивности. По существу, врач-специалист по инвазивным процедурам обнуляет яркость двух соседних источников 90 света, когда трубка или игла 16 входит под углом цели . Поскольку человеческий глаз может в точности определять нуль яркости, можно в точности достигать угла цели.
, цвет источника света, наиболее удаленного от источника света, расположенного под углом φ и соседствующего с источником 86 света, расположенным под углом задается белым. Другой источник света, который соседствует с источником 86 света, расположенным под углом , отключается. Когда , цвет источников 90 света, соседствующих с источником 86 света, расположенным под углом , отключаются. Источник белого света указывает, что врач-специалист по инвазивным процедурам должен перемещать трубку или иглу в направлении источника белого света. Когда врач-специалист по инвазивным процедурам перемещается на φ к , интенсивность источника белого света увеличивается до максимальной интенсивности. Когда врач-специалист по инвазивным процедурам перемещается на φ от , интенсивность источника белого света увеличивается до максимальной интенсивности. По существу, врач-специалист по инвазивным процедурам обнуляет яркость двух соседних источников 90 света, когда трубка или игла 16 входит под углом цели . Поскольку человеческий глаз может в точности определять нуль яркости, можно в точности достигать угла цели.
Вышеописанный подход к указанию выравнивания имеет преимущество в том, что он работает, если запланированная траектория близка к северному полюсу (т.е.  ). Если же ниже определенного порога, соседние источники 90 света можно отключать, чтобы не смущать врача-специалиста по инвазивным процедурам беспорядочным миганием соседних источников 90 света. Более того, вышеописанный подход преимущественно работает, если точка ввода не располагается в центре круговой компоновки, как показано на фиг.7. Дополнительно, источники 80 света преимущественно освещают точку ввода и обеспечивают интуитивно понятное наведение для выравнивания трубки или иглы 16. Стерильные салфетки с секциями прозрачной фольги на пользовательском интерфейсе 76 можно использовать для покрытия пользовательского интерфейса 16 и субъекта 12.
). Если же ниже определенного порога, соседние источники 90 света можно отключать, чтобы не смущать врача-специалиста по инвазивным процедурам беспорядочным миганием соседних источников 90 света. Более того, вышеописанный подход преимущественно работает, если точка ввода не располагается в центре круговой компоновки, как показано на фиг.7. Дополнительно, источники 80 света преимущественно освещают точку ввода и обеспечивают интуитивно понятное наведение для выравнивания трубки или иглы 16. Стерильные салфетки с секциями прозрачной фольги на пользовательском интерфейсе 76 можно использовать для покрытия пользовательского интерфейса 16 и субъекта 12.
На основании углов модуль 64 наведения дополнительно регулирует источники 80 света для обеспечения визуальной индикации для размещения одного или более срезов МР-изображений в реальном времени, отображаемых на устройстве 74 отображения, расположенном вблизи субъекта 12. Операторы МРТ используются для идентификации разных срезов разными цветовыми кодами. Поэтому преимущество состоит в повторном использовании этого цветового кодирования для визуализации поперечного сечения срезов. Для каждого отображаемого среза соответствующие источники света устанавливаются на цветовое кодирование среза.
Дополнительно, на основании углов модуль 64 наведения дополнительно позволяет врачу-специалисту по инвазивным процедурам манипулировать позицией срезов, отображаемых на устройстве 74 отображения. Как упомянуто выше, каждый из источников 80 света связан с устройством пользовательского ввода, например кнопкой. Ниже описан один подход к манипулированию позициями срезов. Однако очевидно, что возможны многочисленные варианты.
Инициирование устройства пользовательского ввода (например, одиночное нажатие кнопки), связанного с одним из источников света, указывающим позицию среза выбирает срез для манипуляции. Выбор можно указывать, например, более высокой яркости или миганием двух источников света. Инициирование устройства пользовательского ввода (например, одиночное нажатие кнопки), связанного с одним из источников света, указывающим позицию выбранного среза, отменяет выбор среза.
После выбора среза, срез можно вращать путем инициирования устройства пользовательского ввода с одной стороны линии, проходящей между источниками света, указывающими срез. Выбор устройства пользовательского ввода в направлении по часовой стрелке вращает срез с заранее заданным шагом угла в направлении по часовой стрелке, и инициирование устройства пользовательского ввода в направлении против часовой стрелки вращает срез с заранее заданным шагом угла в направлении против часовой стрелки. Если количество устройств пользовательского ввода на пользовательском интерфейсе 76 достаточно велико, это может восприниматься как перетаскивание среза. Дополнительно, после выбора среза, срез можно сдвигать и наклонять путем инициирования устройства пользовательского ввода с другой стороны линии, проходящей между источниками света, указывающими срез. Одиночный триггер (например, одиночное нажатие кнопки) одного из этих устройств пользовательского ввода сдвигает срез в направлении устройства пользовательского ввода, и двойной триггер (например, двойное нажатие кнопки) наклоняет срез в заранее определенном направлении относительно линии.
Как показано на фиг. 8 и 9, два источника 92 света указывают поперечное сечение среза 94, кодированного синим и отображаемого на устройстве 74 отображения. Инициирование устройства 98 пользовательского ввода с одной стороны линии 96, проходящей между двумя источниками света, вращает срез 94. Одиночное инициирование устройства 100 пользовательского ввода с другой стороны линии 96 сдвигает срез 94, и двойное инициирование устройства 100 пользовательского ввода с другой стороны линии 96 наклоняет срез 94.
Дополнительно или альтернативно пользовательскому интерфейсу 76, модуль 64 наведения может применять аудиосигналы для помощи врачу-специалисту по инвазивным процедурам в регулировке траектории трубки или иглы 16. Такие параметры, как частота тона, длительность тона или надлежащим образом генерируемый сигнал биения с опорным тоном можно использовать для указания расстояния трубки или иглы 16 от запланированной траектории. Аудиосигналы могут представляться врачу-специалисту по инвазивным процедурам с использованием, например, электроакустического преобразователя 102, например громкоговорителя. Дополнительно или альтернативно пользовательскому интерфейсу 76, модуль 64 наведения может применять устройство отображения, расположенное, например, на поверхностной катушке 36, которое численно представляет отклонение текущей траектории трубки или иглы 16 от запланированной траектории.
Используемый здесь термин память включает в себя один или более из непереходного машиночитаемого носителя; магнитного диска или другого магнитного носителя данных; оптического диска или другого оптического носителя данных; оперативной памяти (ОЗУ), постоянной памяти (ПЗУ), или другого электронного запоминающего устройства, или микросхемы, или набора оперативно соединенных между собой микросхем; интернетовского/интрасетевого сервера, откуда сохраненные инструкции можно извлекать через интернет/интрасеть или локальную сеть; и т.д. Дополнительно, используемый здесь термин процессор включает в себя один или более из микропроцессора, микроконтроллера, графического процессора (ГП), специализированной интегральной схемы (ASIC), вентильной матрицы, программируемой пользователем (FPGA), и пр.; контроллер включает в себя по меньшей мере один блок памяти и по меньшей мере один процессор, причем процессор выполняет процессорно-исполнимые инструкции в памяти; устройство пользовательского ввода включает в себя один или более из мыши, клавиатуры, дисплея с сенсорным экраном, одной или более кнопок, одного или более переключателей, одного или более тумблеров и пр.; и устройство отображения включает в себя один или более из ЖК-дисплея, СИД-дисплея, плазменного дисплея, проекционного дисплея, дисплея с сенсорным экраном и пр.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. На основании вышеприведенного подробного описания можно предложить другие модификации и изменения. Предполагается, что изобретение включает в себя все подобные модификации и изменения, поскольку они отвечают объему нижеследующей формулы изобретения или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ МАГНИТНО-РЕЗОНАНСНОЙ КАТУШКИ ДЛЯ ФИДУЦИАЛЬНЫХ МАРКЕРОВ | 2014 |
|
RU2665343C1 |
| АЛГОРИТМ ДЛЯ КОНСОЛИ ФОТОННОЙ ИГЛЫ | 2010 |
|
RU2544465C2 |
| СПОСОБ УПРАВЛЕНИЯ ВВОДОМ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ПОСРЕДСТВОМ ТРЕХМЕРНОЙ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2011 |
|
RU2627596C2 |
| СИСТЕМА ДЛЯ ПОДДЕРЖКИ ВЫПОЛНЕНИЯ ИНТЕРВЕНЦИОННЫХ ПРОЦЕДУР | 2017 |
|
RU2746151C2 |
| ЗВУКОВЫЕ РАСШИРЕНИЯ ДЛЯ МЕДИЦИНСКИХ СИСТЕМ | 2014 |
|
RU2675453C2 |
| СИСТЕМА КОНТРОЛЯ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2703688C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ПРОНИКАЮЩЕГО ИНСТРУМЕНТА | 2014 |
|
RU2688316C1 |
| СИСТЕМА И СПОСОБ ДЕТЕКТИРОВАНИЯ РАЗМЕЩЕНИЯ ИГЛЫ ПРИ БИОПСИИ ПОД КОНТРОЛЕМ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2591595C2 |
| РЕТРОСПЕКТИВНОЕ ВЫЧИСЛЕНИЕ ДОЗЫ ОБЛУЧЕНИЯ И УСОВЕРШЕНСТВОВАННОЕ ПЛАНИРОВАНИЕ ЛЕЧЕНИЯ | 2010 |
|
RU2545097C2 |
| БЕСПРОВОДНОЙ МАРКЕР ПЕРСПЕКТИВНОГО ДВИЖЕНИЯ | 2012 |
|
RU2604702C2 |



Группа изобретений относится к медицинской технике, а именно к медицинским диагностическим магнитно-резонансным системам. Магнитно-резонансная система для наведения трубки или иглы на цель субъекта содержит пользовательский интерфейс, включающий в себя рамку, выполненную с возможностью размещения на поверхности субъекта, которая содержит отверстие поверх точки ввода запланированной траектории для трубки или иглы, один или более визуальных индикаторов, размещенных на рамке вокруг отверстия, которые предназначены для визуальной индикации отклонения трубки или иглы от запланированной траектории или визуальной индикации текущей позиции среза в реальном времени MP-изображений, один или более устройств пользовательского ввода, размещенных на рамке вокруг отверстия. Способ наведения трубки или иглы на цель субъекта, осуществляемый посредством магнитно-резонансной системы. Устройство для наведения трубки или иглы на цель субъекта функционирует совместно с интервенционным инструментом, обеспечивающим формирование изображения в реальном времени для наведения трубки или иглы на цель субъекта. Использование группы изобретений обеспечивает упрощение работы с интерфейсом для интерстициальных вмешательств с магнитно-резонансным наведением. 3 н. и 17 з.п. ф-лы, 9 ил.
1. Магнитно-резонансная (MP) система (10) для наведения трубки или иглы (16) на цель (14) субъекта (12), причем упомянутая система (10) содержит:
пользовательский интерфейс ( 76), включающий в себя:
рамку (78), выполненную с возможностью размещения на поверхности субъекта (12), причем рамка (78) включает в себя отверстие (82) поверх точки ввода запланированной траектории для трубки или иглы (16), причем запланированная траектория проходит от точки ввода к цели (14); и
по меньшей мере один из:
одного или более визуальных индикаторов (80), размещенных на рамке (78) вокруг отверстия (82), причем один или более визуальных индикаторов (80) предназначены для по меньшей мере одного из:
визуальной индикации отклонения трубки или иглы (16) от запланированной траектории; и
визуальной индикации текущей позиции среза в реальном времени MP-изображений в реальном времени; и
одного или более устройств (84) пользовательского ввода, размещенных на рамке (78) вокруг отверстия (82), причем устройства (84) пользовательского ввода избирательно регулируют текущую позицию среза в реальном времени.
2. Система (10) по п. 1, в которой рамка (78) включает в себя один или более визуальных индикаторов (80), причем система (10) дополнительно включает в себя:
по меньшей мере один процессор (44), запрограммированный:
определять текущую траекторию трубки или иглы (16);
сравнивать запланированную траекторию с текущей траекторией для определения отклонения трубки или иглы (16) от запланированной траектории; и
генерировать визуальную индикацию отклонения трубки или иглы (16) от запланированной траектории с использованием одного или более визуальных индикаторов (80) пользовательского интерфейса (76).
3. Система (10) по п. 2, в которой один или более визуальных индикаторов (80) включают в себя устройство отображения, окружающее отверстие (82), и визуальная индикация генерируется путем избирательного отображения визуальных знаков на устройстве отображения вокруг отверстия (82) для указания направления правильного выравнивания или вспомогательной информации, влияющей на размещение трубки или иглы (16) относительно запланированной траектории.
4. Система (10) по п. 2, в которой один или более визуальных индикаторов (80) включают в себя множество источников света, разнесенных вокруг отверстия (82), причем визуальная индикация генерируется посредством по меньшей мере одного из:
избирательного включения/отключения одного или более визуальных индикаторов (80) для указания направления правильного выравнивания трубки или иглы (16) с запланированной траекторией; и
избирательной регулировки одного или более из цвета, яркости и частоты мигания одного или более визуальных индикаторов (80) для указания направления правильного выравнивания.
5. Система (10) по п. 2, в которой текущая траектория определяется с использованием МР-маркера (40), прикрепленного к трубке или игле (16), и кожного МР-маркера (68), расположенного на поверхности субъекта (12) в отверстии (82) рамки (78) и отмечающего точку ввода запланированной траектории для трубки или иглы (16).
6. Система (10) по п. 1, дополнительно включающая в себя:
по меньшей мере один процессор (44), запрограммированный:
отображать срез в реальном времени на устройстве (74) отображения и
генерировать визуальную индикацию текущей позиции среза в реальном времени с использованием пользовательского интерфейса (76), причем один или более визуальных индикаторов (80) указывают, где плоскость среза в реальном времени пересекает рамку (78).
7. Система (10) по п. 6, в которой процессор (44) дополнительно запрограммирован:
отслеживать устройства (84) пользовательского ввода для обнаружения инициирования устройства пользовательского ввода; и,
в ответ на обнаружение инициирования устройства пользовательского ввода, регулировать текущую позицию среза в реальном времени на основании позиции инициированного устройства пользовательского ввода.
8. Система (10) по п. 6, в которой один или более визуальных индикаторов (80) включают в себя множество источников света, разнесенных вокруг отверстия (82), и каждый из одного или более визуальных индикаторов (80) соответствует отдельному одному из устройств (84) пользовательского ввода.
9. Система (10) по п. 6, в которой срез в реальном времени является одним из множества кодированных цветом срезов, отображаемых на устройстве (74) отображения, и один или более визуальных индикаторов (80) указывают, где плоскость среза в реальном времени пересекает рамку (78), с использованием цветового кодирования среза в реальном времени.
10. Система (10) по п. 6, в которой пользовательский интерфейс (76) объединен с поверхностной передающей и/или приемной катушкой (36), причем поверхностная приемная катушка (36) принимает и затем генерирует MP-данные для MP-изображений в реальном времени.
11. Система (10) по п. 1, дополнительно включающая в себя электроакустическое устройство (102), выводящее аудиосигнал, указывающий отклонение трубки или иглы, (16) от запланированной траектории.
12. Система (10) по любому из пп. 1-11, в которой один или более визуальных индикаторов (80) визуально указывают отклонение трубки или иглы (16) от запланированной траектории и визуально указывают текущую позицию среза в реальном времени.
13. Способ магнитно-резонансного (MP) наведения трубки или иглы (16) на цель (14) субъекта (12), причем упомянутый способ содержит:
по меньшей мере один из этапов, на которых:
визуально указывают, как выравнивать трубку или иглу (16) с запланированной траекторией, причем упомянутое визуальное указание, как выравнивать трубку или иглу (16) с запланированной траекторией, включает в себя этапы, на которых:
определяют текущую траекторию трубки или иглы (16);
сравнивают запланированную траекторию с текущей траекторией для определения, как выравнивать трубку или иглу (16) с запланированной траекторией, причем запланированная траектория проходит от точки ввода субъекта (12) к цели (14); и
генерируют визуальную индикацию в отношении того, как выравнивать трубку или иглу (16) с запланированной траекторией с использованием пользовательского интерфейса (76), причем пользовательский интерфейс (76) располагается на поверхности субъекта (12) и включает в себя отверстие (82) поверх точки ввода; и
визуально указывают текущую позицию среза в реальном времени MP-изображений в реальном времени, причем упомянутое визуальное указание текущей позиции среза в реальном времени МР-изображений в реальном времени включает в себя этапы, на которых:
отображают срез в реальном времени на устройстве (74) отображения и
генерируют визуальную индикацию текущей позиции среза в реальном времени с использованием пользовательского интерфейса (76), причем один или более источников (80) света пользовательского интерфейса (76) указывают, где плоскость среза в реальном времени пересекает поверхность.
14. Способ по п. 13, причем способ дополнительно включает в себя этап, на котором:
избирательно отображают визуальные знаки на устройстве (80) отображения пользовательского интерфейса (76), причем визуальные знаки отображаются вокруг отверстия (82) для указания направления правильного выравнивания трубки или иглы (16) с запланированной траекторией.
15. Способ по п. 13, причем способ дополнительно включает в себя по меньшей мере один из этапов, на которых:
избирательно включают/отключают множество источников (80) света пользовательского интерфейса (76) для указания направления правильного выравнивания трубки или иглы (16) с запланированной траекторией, причем источники (80) света разнесены вокруг отверстия (82); и
избирательно регулируют один или более из цвета, яркости и частоты мигания источников (80) света для указания направления правильного выравнивания.
16. Способ по п. 13, причем способ включает в себя этап, на котором визуально указывают текущую позицию среза в реальном времени MP-изображений в реальном времени и дополнительно включает в себя этапы, на которых:
отслеживают одно или более устройств (84) пользовательского ввода пользовательского интерфейса (76) для обнаружения инициирования устройства пользовательского ввода, причем устройства (84) пользовательского ввода размещены вокруг отверстия (82); и,
в ответ на обнаружение инициирования устройства пользовательского ввода, регулируют текущую позицию среза в реальном времени на основании позиции устройства пользовательского ввода относительно источника света, указывающей текущую позицию среза в реальном времени.
17. Способ по любому из пп. 13-16, причем способ дополнительно включает в себя этапы, на которых:
визуально указывают, как выравнивать трубку или иглу (16) с запланированной траекторией; и
визуально указывают текущую позицию среза в реальном времени MP-изображений в реальном времени.
18. Устройство для наведения трубки или иглы на цель субъекта, функционирующее совместно с интервенционным инструментом, обеспечивающим формирование изображения в реальном времени для наведения трубки или иглы (16) на цель (14) субъекта (12), причем устройство содержит:
рамку (78), выполненную с возможностью размещения на поверхности субъекта (12), причем рамка (78) включает в себя отверстие (82) поверх точки ввода запланированной траектории для трубки или иглы (16), проходящей от точки ввода к цели (14), причем рамка (78) включает в себя один или более визуальных индикаторов (80), размещенных на рамке (78) вокруг отверстия (82); и
по меньшей мере один процессор (44), запрограммированный оперировать одним или более визуальными индикаторами (80) на рамке (78) для визуального указания по меньшей мере одного из: (i) текущей позиции трубки или иглы (16), определенной на основании формирования изображения в реальном времени; и (ii) отклонения текущей позиции трубки или иглы (16) от запланированной траектории.
19. Устройство по п. 18, в котором рамка (78) представляет собой кольцо, которое окружает отверстие (82), и один или более визуальных индикаторов (80) располагаются вокруг отверстия (82).
20. Устройство по п. 19, в котором рамка (78) представляет собой кольцо, которое окружает отверстие (82), и один или более визуальных индикаторов (80) представляют собой один из (1) набора СИД, окружающего отверстие (82), и (2) кольцевого дисплея, окружающего отверстие (82).
| US6119032 A, 12.09.2000 | |||
| US5943719 A, 31.08.1999 | |||
| US 2008221520 A1, 11.09.2008 | |||
| СКРИНИНГОВЫЙ СПОСОБ ДИАГНОСТИКИ АСЕПТИЧЕСКОГО НЕКРОЗА СУСТАВНЫХ КОНЦОВ КОСТЕЙ КРУПНЫХ СУСТАВОВ | 2010 |
|
RU2436512C1 |

