Изобретение относится к области контроля и испытания тормозных систем, а более конкретно к способам диагностирования тормозных устройств подъемных механизмов с электроприводом.
Известен способ контроля работы колодочного тормоза, защищенный патентом на изобретение №2081013, МПК6 В60Т 17/22, F16D 16/00, опубл. 10.06.1997. Сущность изобретения: устройство колодочного тормоза и степени износа фрикционных накладок снабжено датчиками для определения положения колодок, датчиками для определения износа фрикционных накладок, реле, срабатывающим при дефекте и способным подавать сигнал остановки машины, когда датчики положения и износа обнаруживают недостаточное высвобождение колодок или износ накладок. Способ включает автоматическое моделирование - осуществляемое циклично и постоянно - дефективного положения колодок и износа фрикционных накладок для проверки работы срабатывающего при дефекте реле и средств обработки данных. Осуществляется автоматическое возвращение указанного, срабатывающего при дефекте реле в исходное состояние после каждой операции моделирования условий дефектного состояния и износа, чтобы установить его в нормальное состояние.
Известным способом определяются положение колодок и износ фрикционных накладок, однако не контролируется величина тормозного момента в механизме подъема с электроприводом и невозможно судить об исправности тормозного устройства.
Известно устройство для диагностирования дисковых тормозов шахтной подъемной машины по заявке на изобретение №92004288, МПК5 B66D 5/14, опубл. 15.10.1994. С помощью этого устройства осуществляют автоматический цикличный контроль целостности приводных пружинных пакетов привода тормоза и др. неисправностей, например его заклинивание.
Известным устройством для диагностирования дисковых тормозов шахтной подъемной машины невозможно измерить и контролировать величину тормозного момента и судить об исправности тормозного устройства.
Известен способ диагностирования тормозных систем транспортных средств по патенту на изобретение №2180630, МПК7 В60Т 17/22, G01M 17/00, опубл. 20.03.2002, который, как и заявляемый способ, основан на сравнении контролируемых тормозных параметров с номинальными значениями. Он выбран в качестве прототипа. Способ диагностирования тормозных систем транспортных средств заключается в торможении раскрученных до заданной скорости вывешенных колес, на которые исключено внешнее воздействие, непрерывном измерении в процессе торможения чисел импульсов опорного генератора эталонной частоты между смежными импульсами датчика угловой скорости колеса, нахождении по ним времени торможения до полной остановки каждого колеса и промежутков времени, соответствующих повороту колеса на смежные и равные угловые интервалы заданной величины, вычислении текущих значений угловой, линейной скоростей и замедления каждого вывешенного колеса, получении зависимости замедления каждого колеса по времени, определении по ней времени запаздывания тормозной системы, времени нарастания замедления, общего времени торможения, замедления незаторможенного колеса, установившегося замедления, максимального замедления, тормозного пути за время установившегося торможения, тормозного пути колеса, дополнительном определении моментов инерции колес. Заключение о техническом состоянии тормозов делают на основе сравнения полученных в процессе диагностирования значений указанных параметров тормозного процесса при измеренных значениях моментов инерции колес с их нормативными значениями, полученными для каждого из указанных параметров в зависимости от момента инерции колес при исправной тормозной системе. Тормозная система считается исправной при равенстве измеренных значений с нормальными значениями исправной тормозной системы. Техническим результатом является повышение точности определения технического состояния тормозных систем за счет учета влияния на параметры процесса торможения вывешенных колес износа шин.
Контроль тормозного устройства по прототипу осуществляется путем измерения множества контролируемых параметров тормозного устройства, но к тому же эти параметры характерны для транспортных систем и не подходят для контролирования тормозного устройства в механизме подъема.
Задачей изобретения является осуществление контроля исправного состояния тормозного устройства в механизме подъема с электроприводом простым и эффективным способом.
Технический результат, на который направлено заявляемое изобретение при решении поставленной задачи, заключается в определении исправности тормозного устройства по разности потребляемой активной мощности электродвигателя, которая идет непосредственно на торможение тормозного устройства, и повышении точности контроля.
Технический результат достигнут за счет того, что, как и в прототипе, по заявляемому способу сначала измеряют параметры тормозного процесса исправного тормозного устройства, затем измеряют те же параметры контролируемого тормозного устройства, а заключение об исправности последнего производят на основе сравнения значений параметров контролируемого тормозного устройства с значениями аналогичных параметров исправного тормозного устройства.
В отличие от прототипа контроль исправности тормозного устройства осуществляют в режиме работы механизма подъема по разнице значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях тормозного устройства. Сначала измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема с разомкнутым исправным тормозным устройством. Затем кратковременно замыкают исправное тормозное устройство и измеряют величину потребляемой активной мощности электродвигателя при замкнутом тормозном устройстве. После этого тормозное устройство размыкают и вновь измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема и сравнивают ее со значением потребляемой активной мощности, полученным до замыкания исправного тормозного устройства. При равенстве полученное значение используют для определения разности значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях исправного тормозного устройства. В случае неравенства, которое может быть вызвано изменением массы поднимаемого или опускаемого груза во время контроля тормозного устройства, указанные измерения повторяют до получения равных значений для определения разницы. Значение разности потребляемых активных мощностей электродвигателя для исправного тормозного устройства принимают за эталон, который используют для контроля тормозного устройства в режиме работы механизма подъема. Эталонное значение через блок ввода информации вводят в цифровой запоминающий блок. Для получения заключения об исправности контролируемого тормозного устройства аналогично, как для исправного тормозного устройства, определяют разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства, которую сравнивают с эталонным значением. Тормозное устройство считают исправным при равенстве этих значений. Данные о неисправности тормозного устройства формируют посредством световой и/или звуковой сигнализации. Кроме того, потребляемую активную мощность измеряют посредством датчика активной мощности, например, выполненного на базе интегральной микросхемы UА01ПС1Г, установленного в электросиловом щите подъемной машины и подключенного к питающей сети электродвигателя механизма подъема.
В частном случае контроль тормозного устройства осуществляют по тормозному моменту, для этого в цифровой запоминающий блок вводят график линейной зависимости тормозного момента от разницы потребляемых активных мощностей, построенный по двум точкам Мт=0, ΔР=0 и Мт=Мт н, ΔР=АРн, где Мт - значение тормозного момента контролируемого устройства, ΔР - разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства, Мт н - значение номинального тормозного момента, ΔРн - разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях исправного тормозного устройства, по графику определяют величину тормозного момента контролируемого тормозного устройства по полученной разности потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства, если она равна величине номинального тормозного момента, тормозное устройство считают исправным. Контроль тормозного устройства по тормозному моменту по сути является контролем тормозного устройства по потребляемой активной мощности, но более нагляден для определения исправности тормозного устройства, поскольку тормозной момент - один из важнейших параметров тормозного устройства.
Авторам и заявителю не известны из уровня техники способы контроля тормозного устройства механизмов подъема с электроприводом, в которых контроль исправности тормозного устройства осуществлялся бы по потребляемой активной мощности и определение величины тормозного момента и по нему диагностика тормозного устройства осуществлялось бы тоже по потребляемой активной мощности электродвигателя механизма подъема. Реализация способа отличается простотой и в то же время высоким качеством определения, поскольку оно ведется непосредственно из питающей сети электродвигателя. Вышесказанное дает основание утверждать о наличии у заявляемого способа изобретательского уровня.
Установка датчика активной мощности в электросиловом щите механизма подъема и подключение его к питающей сети электродвигателя, в защищенном от внешних воздействий месте, позволяет точно, без погрешности, контролировать величину тормозного момента. А это, в свою очередь, повышает качество, скорость осуществления, частоту контроля и надежность функционирования способа контроля тормозного устройства механизма подъема с электроприводом.
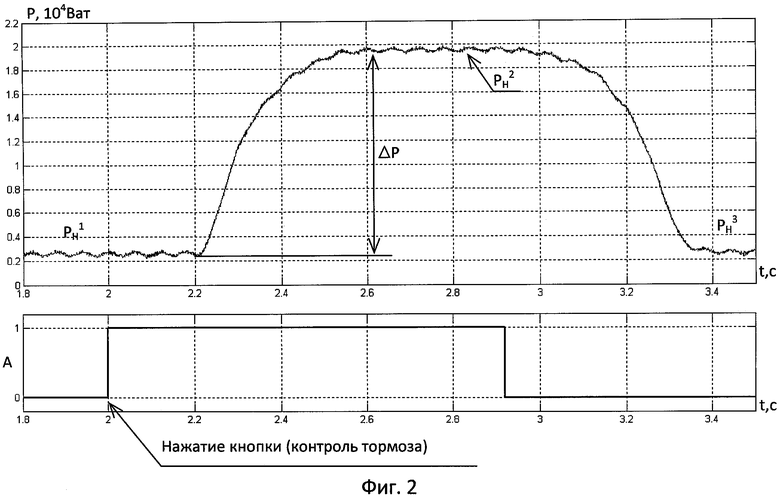
На фиг.1 представлена функциональная схема устройства контроля величины тормозного момента.
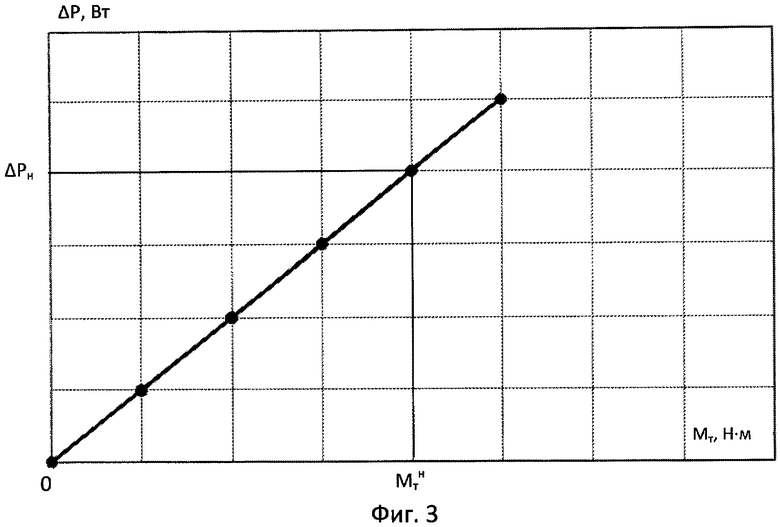
На фиг.2 представлены временные диаграммы сигнала активной мощности Р с датчика активной мощности при работе механизма подъема и логический сигнал А замыкания тормозного устройства, где Рн 1 - до замыкания тормозного устройства, Рн 2 - при замыкании тормозного устройства, Рн 3 - после размыкания тормозного устройства, ΔРн - разность Рн 2-Рн 1.
На фиг.3 представлена зависимость значения потребляемой активной мощности ΔР электродвигателя от величины тормозного момента.
Предложенный способ может быть осуществлен с помощью устройства контроля величины тормозного момента на фиг.1, где цифровой вычислительный блок (ЦВБ) 1 связан с соответствующими выходами блока ввода информации (БВИ) 2 и датчика активной мощности 3, установленного в электросиловом щите крана. ЦВБ 1 соединен также с цифровым запоминающим блоком (ЦЗБ) 4, с блоком визуальной и звуковой индикации 5 и с электронным ключом 6.
В качестве цифрового вычислительного блока 1 может быть выбран одноплатный микроконтроллер типа АТ89С2051 с тактовой частотой 4 МГц. Блок ввода информации 2 - это кнопка «контроль тормоза». Датчик активной мощности 3 может быть выполнен на интегральной микросхеме типа UA01ПC1Г, а цифровой запоминающий блок 4 может быть представлен в виде FLASH памяти. Блок визуальной и звуковой индикации 5 представляет собой цифровой индикатор, на котором отображается величина разницы потребляемых мощностей тормозного момента, звуковая индикация осуществляется за счет динамика. Электронный ключ 6 представляет собой постоянное запоминающее устройство, в котором содержится код разрешения доступа к перепрограммированию цифрового вычислительного блока 1, выполнен съемным и устанавливается во внешний разъем цифрового вычислительного блока 1.
Реализацию способа рассмотрим на примере работы крана КМ-20. Перед началом работы требуется ввести в память ЦЗБ 4 номинальную потребляемую активную мощность ΔРн или (для частного случая) номинальное значение тормозного момента Мт н. Для этого в ЦВБ 1 вставляем электронный ключ 6 и устройство переходит в режим обучение. Далее в установившемся режиме работы механизма подъема нажимается кнопка «контроль тормоза» блока ввода информации 2 и происходит измерение значения потребляемой активной мощности Рн 1, далее замыкается кратковременно тормозное устройство и происходит измерение значения потребляемой активной мощности Рн 2, далее тормозное устройство размыкается и происходит измерение значения потребляемой активной мощности Рн 3. При этом тормозное устройство должно быть исправно и настроено. Затем ЦВБ 1 проверяет условие Рн 1=Рн 3 (в случае неравенства, которое может возникнуть вследствие изменения массы груза в процессе измерения значений потребляемых активных мощностей, загорается красная лампа и нужно произвести измерение повторно), если условие удовлетворяется, то потребляемая активная мощность при данном тормозном моменте будет ΔРн=Рн 2-Рн 1. Затем ЦЗБ 4 сохраняет значение ΔРн, по которому будет определятся исправность тормозного устройства. В частном случае дополнительно выводится на индикатор значение номинального тормозного момента и по двум точкам (Мт=0, ΔР=0; Мт=Мт н и ΔР=ΔРн) строится линейная зависимость Mт=f(ΔP), по которой в дальнейшем будет определятся тормозной момент контролируемого тормозного устройства Мт - обучение закончено. Затем вытаскивают электронный ключ 6 и устройство переходит в режим контроля.
Для того чтобы произвести контроль тормозного механизма, оператор в установившемся режиме работы механизма подъема должен нажать кнопку 2 «контроль тормоза». Далее происходит измерение значения потребляемой активной мощности Р1, далее замыкается кратковременно тормоз и происходит измерение значения потребляемой активной мощности Р2, далее тормоз размыкается и происходит измерение значения потребляемой активной мощности Р3. Затем ЦВБ 1 проверяет условие Р1=Р3 (в случае неравенства на индикаторе отображается информация, что нужно произвести измерение повторно), если условие удовлетворяется, то ΔР=Р2-Р1. Полученная разница ΔР - это мощность, которая непосредственно идет на торможение. Если она равна запомненной ΔРн, то тормозное устройство исправно. При неравенстве цифровой вычислительный блок 1 подает сигнал на блок визуальной и звуковой индикации 5 о неисправности тормозного устройства. Если исправность тормозного устройства определяется по тормозному моменту «частный случай», то ЦЗБ 4 сохраняет значение ΔР. Затем по линейной зависимости Mт=f(ΔP) определяется тормозной момент и выводится на индикатор значение тормозного момента. Если Мт=Мт н, то тормозное устройство исправно, а если Мт<Мт н, то тормозное устройство не исправно.
По потреблению активной мощности электродвигателя во время кратковременной блокировки тормозного устройства определяют величину тормозного момента по графику линейной зависимости P=f(Mт) (фиг.3) и фиксируют значение с помощью блока визуальной и звуковой индикации 5. В случае уменьшения допустимого значения величины тормозного момента потребляемая активная мощность электродвигателя не достигает требуемого значения и цифровой вычислительный блок 1 вырабатывает команду на блок индикации о неисправности. При появлении предупреждающих сигналов оператор должен принять необходимые меры в рамках его должностных обязанностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля тормозного устройства механизма подъема с электроприводом | 2017 |
|
RU2672338C1 |
| СПОСОБ ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ КРАНА МОСТОВОГО ТИПА | 2007 |
|
RU2354604C1 |
| Электропривод | 1974 |
|
SU720647A1 |
| Способ защиты шахтной подъемной установки от напуска каната | 1987 |
|
SU1572967A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ОПУСКАНИЕМ ПЕРЕДНЕЙ СТОЙКИ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПРОБЕГЕ ПО ПОВЕРХНОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 1992 |
|
RU2036821C1 |
| Способ торможения асинхронного электродвигателя | 1984 |
|
SU1226598A1 |
| Способ диагностирования скользящего контакта электродвигателя | 1982 |
|
SU1071980A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ОБМОТОК НА КОРОТКОЕ ЗАМЫКАНИЕ | 2009 |
|
RU2413955C1 |
| Способ оценки потерь мощности в коробке передач транспортного средства | 2018 |
|
RU2696050C1 |
Изобретение относится к области тормозных устройств для подъемных механизмов. Для осуществления контроля тормозного устройства механизма подъема с помощью датчика активной мощности измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема с разомкнутым исправным тормозным устройством, затем кратковременно замыкают исправное тормозное устройство и измеряют величину потребляемой активной мощности электродвигателя при замкнутом тормозном устройстве. Определяют разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства, которую сравнивают с эталонным значением, при их равенстве тормозное устройство считают исправным. Достигается повышение безопасности. 3 з.п. ф-лы, 3 ил.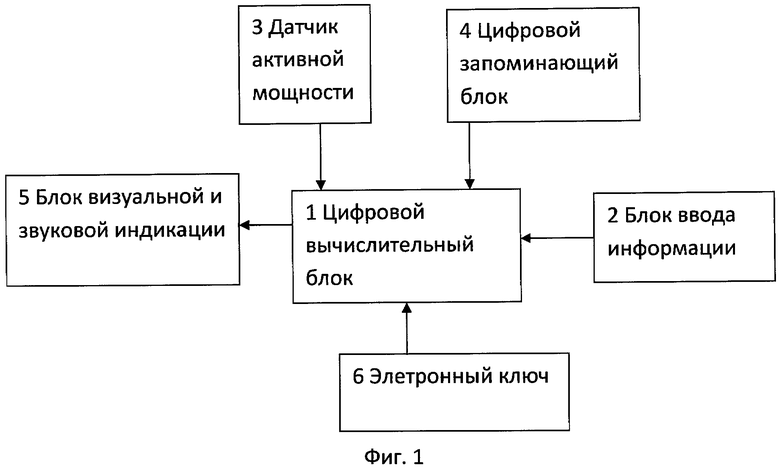
1. Способ контроля тормозного устройства механизма подъема с электроприводом, согласно которому сначала измеряют параметры тормозного процесса исправного тормозного устройства, затем измеряют те же параметры контролируемого тормозного устройства, а заключение об исправности последнего производят на основе сравнения значений параметров контролируемого тормозного устройства с значениями аналогичных параметров исправного тормозного устройства, отличающийся тем, что контроль исправности тормозного устройства осуществляют в режиме работы механизма подъема по разнице значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях тормозного устройства, для этого сначала измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема с разомкнутым исправным тормозным устройством, затем кратковременно замыкают исправное тормозное устройство и измеряют величину потребляемой активной мощности электродвигателя при замкнутом тормозном устройстве, после чего тормозное устройство размыкают и вновь измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема и сравнивают ее со значением потребляемой активной мощности, полученным до замыкания исправного тормозного устройства, при их равенстве полученное значение используют для определения разности значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях исправного тормозного устройства, а в случае неравенства, которое может быть вызвано изменением массы поднимаемого или опускаемого груза во время контроля тормозного устройства, измерения повторяют до получения равных значений для определения разницы, значение разности потребляемых активных мощностей электродвигателя для исправного тормозного устройства принимают за эталон, а для получения заключения об исправности контролируемого тормозного устройства аналогично, как для исправного тормозного устройства, определяют разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства, которую сравнивают с эталонным значением, при их равенстве тормозное устройство считают исправным, кроме того, потребляемую активную мощность измеряют посредством датчика активной мощности, установленного непосредственно в электросиловом щите подъемной машины и подключенного к питающей сети электродвигателя механизма подъема.
2. Способ контроля по п.1, отличающийся тем, что данные о неисправности тормозного устройства формируют посредством световой и/или звуковой сигнализации.
3. Способ контроля по п.1, отличающийся тем, что величину потребляемой активной мощности измеряют датчиком активной мощности, выполненным на базе интегральной микросхемы UA01ITC1Г.
4. Способ контроля по п.1, отличающийся тем, что контроль тормозного устройства осуществляют по тормозному моменту, для этого в цифровой запоминающий блок вводят график линейной зависимости тормозного момента от разницы потребляемых активных мощностей, построенный по двум точкам: Мт=0, ΔР=0 и Мт=Мт н, ΔР=ΔРн, где Мт - значение тормозного момента контролируемого устройства; ΔР - разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства; Мт н - значение номинального тормозного момента; ΔРн - разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях исправного тормозного устройства, по графику определяют величину тормозного момента контролируемого тормозного устройства по полученной разности потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства, если она равна величине номинального тормозного момента, тормозное устройство считают исправным.
| СПОСОБ ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ КРАНА МОСТОВОГО ТИПА | 2007 |
|
RU2354604C1 |
| US 20110001101 A1, 06.01.2011 | |||
| CN 101402438 A, 08.04.2009 | |||
| KR 976569 B1, 17.08.2010. | |||

