I
Изобретение относится к электротехнике и может быть использовано в асинхронных электроприводах с активным моментом статического сопротивления на валу двигателя, например, в электроприводах механизации подъема подъемно-транспортных машин.
Цель изобретения - уменьгаение времени торможения.
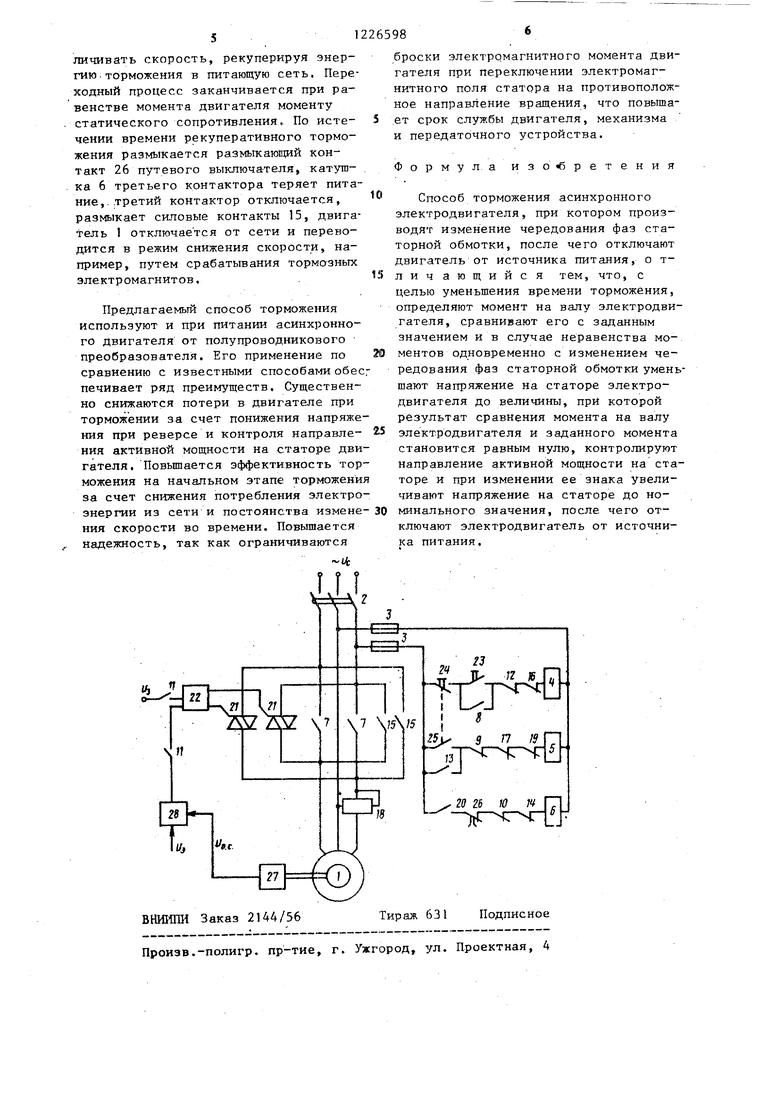
На чертеже представлена схема устройства, реализующего способ торможе ВИЯ асинхронного двигателя.
Устройство содержит асинхронный электродвигатель , автоматический переключатель 2 в цепи питания электродвигателя, предохранители.3, три контактора с катушками 4-6 и контактами 7-17, катушка 18 реле направления активной мощности на статоре электродвигателя 1 включена межл,у двумя фазами статорной обмотки, один контакт 9 реле направления активной мощности включен между катушкой 5 контактора и контактом 17, который через последовательно соединенные контакты 9 и 13 соединен с одним из предохранителей 3 и с одним из выво дов контакта 20 реле направления активной мощности, два симистора 21, включенные перекрестно меж,а,у двумя фазами статорной обмотки электродвигателя, блок 22 управления симисто- рами одним входом через контакт 11 подсоединен к источнику задающего напряжения.
Включающая кнопка 23, шунтируемая контактом 8, через отключающую кнопку 24 соединена с контактом 20, контакт 25 кнопки 24 шунтирует контакт 13, другой вывод кнопки 23 через контакты 12 и 16 соединен с одним выводом катушки 4, другой вывод контакта 20 через контакт 26 конечного выключателя и последовательно соединенные контакты 10 и 14 подсоединен к одному выводу катушки 6, другие выводы катушек 4-6 объединены и соединены с другим предохранителем, датчик 27 момента, установленный на валу электродвигателя, подсоединен к одному из входов блока 2В суммирования, к другому входу которого подается заданное напряжение Ui, выход блока 28 подключен к другому входу блока 22 управления симисторами.
Устройство работает следующим образом.
2265982
Для пуска двигателя включается автоматический переключатель 2, за- мьпсается кнопка 23, катушка 4 первого контактора получает питание по
5 цепи: кнопки 24 и 23, контакты 12 и - 16з катушка 4, и контактор срабатывает, За1мь1каются силовые замыкающие контакты 7 первого контактора, обмотка статора двигателя 1 подключа 0 ется к сети, двигатель 1 запускается в работу и после окончания режима пуска работает в установившемся режиме, соответствующем моменту статического сопротивления М на валу и
t5 скорости вращения со.
При этом замыкается блокировочный контакт 8, шунтируя кнопку 23, и раз- 1 1ыкаются размыкающие контакты 9 и 10, исключая включение второго и третье20 го контакторов. Схема приведена в исходное состояние, предшествугацее началу реализации способа торможения асинхронного двигателя.
25 Способ торможения асинхронного ДБИГё1теля осуществляют следуюпщм образом.
Для перевода двигателя 1 из двигательного режима в тормозной нажимается отключающая кнопка 24, размыкается ее размыкающий контакт 25 питания катушки 4 первого контактора и замьп ается з a {Ь кaюпшй контакт в цепи питания катушки 5 второго контакта.
Катушка 4 теряет питание, первЬш контактор отключается, разг ыкаются его силоЕ:ьге контакты 7 и обмотка статора двигателя 1 отключается от сети с но- данальным напряжением, а размыкающие контакты 9 и 10 замыкаются. При этом получает питание катушка 5 второго контактора по цепи контакты 25,9,17 и 19, катушка 5, второй контактор срабатывает, замыкается его замыкающий контакт 11 и на вход блока 22 управления симисторами 21 подается сигнал Uj из разомкнутой или замкнутой ci-icTEiM управления реверсом. Блок 22 начинает формировать управляющие импульсл на симисторы 21 при соответствующем значению U угле управления и они открываются. Обмотки статора двигателя 1 подключаются к сети, причем чередование фаз на статоре двигателя I изменяется (например, с А,В, С на С,В,А)5 а в результате чего дви- гатех1ь переводится в режим торможения противовключением.
Кроме изменения чередования фаз, и, следовательно, изменения направления вращения электромагнитного поля статора, симисторы 21 обеспечивают понижение напряжения U на статоре асинхронного двигателя до величины, при которой момент М двигателя определяется разностью заданного тормозного момента М. и момента статическо
двигателя. При этом также сохраняется заданный тормозной момент, постоянство ускорения ротора, снижение потребления электроэнергии и уменьше- 5 ние потерь. Причем, реверс двигателя производится в основном за счет активного момента статического сопротивления. Катушка 18 реле направления активной мощности остается при
го сопротивления М (|-М ( - ( Ю реверсе, как и при двигательном реет
1-М
Если момент статического сопротивления остается неизменным в процессе работы электропривода, то для реализации способа может использоваться разомкнутая система управления. При этом, исходя из известных Ц и М, , определяется момент М ,, двигателя и на основании его значения и
жима, отключенной, так как направление активной мощности не изменяется (от сети к двигателю). Второй контактор , срабатывая, размыкает размыкаю- 15 щий контакт 12 в цепи питания катушки 4 первого контактора, замыкает замыкающий контакт 13, шунтируя контакт 25 отключающей кнопки, и размыкает размыкающий контакт 14 в цепи параметров двигателя рассчитывается 20 питания катушки 6 третьего контакто- напряжение на статоре двигателя. По ра.
значению напряжения находят величину в результате реверса, скорость задающего напряжения U. В процессе двигателя 1 под действием суммарного торможения величина Ug может изме- момента (М + М ) приближается к зна- няться, например в функции времени, 25 чению синхронной скорости (j , сколь- с целью сохранения постоянного момента двигателя.
Если момент статического сопротивления изменяется в процессе работы электропривода, или при торможении зо ет свое направление, так как двига- двигателя, то.необходимо для реализа- тель переходит в режим рекуператив- ции данного способа применить замкну- ного торможения. В момент изменения тую систему управления. Для ее pea- направления активной мощности на ста- лизации устанавливается датчик 27 мо- оре двигателя 1 катушка 18 реле нап- мента на валу двигателя 1, выходной 35 равления активной мощности включается, размыкает свой размыкающий контакт 19 в цепи питания катушки 5 второго контактора, обесточивая ее, и
жение уменьшается, а затем изменяет знак на отрицательный. При этом потребляемая из сети активная мощность уменьшается до нуля, а затем изменясигнал Ирр которого поступает на первый вход блока 28 суммирования, на второй вход которого подается сигнал Uj, пропорциональный заданному тормозному моменту М,. В блоке суммиро- 40 вания происходит их вычитание (Uj - UDC ) что соответствует операции М - М„ М.
Таким образом, в результате алзамыкает замыкаюш 1й контакт 20 в цепи питания катушки 6 третьего контактора - второй контактор отключается, размыкает свой контакт 11, снимаются управляющие импульсы с симисторов 21, посотедние закрываются и отключают
замыкает замыкаюш 1й контакт 20 в цепи питания катушки 6 третьего контактора - второй контактор отключается, размыкает свой контакт 11, снимаются управляющие импульсы с симисторов 21, посотедние закрываются и отключают
ка 28 сигнал U,
пропорциональный
гебраического суммирования сигналов 45 двигатель от сети с пониженным напря- и, , определяется на выходе бло- жением. При этом замыкается размыкающий контакт 14 и катушка 6 третьего контактора получает питание по цепи: контакты 20,26,10 и 14 и катушка 6. Третий контактор срабатывает и замыкает свои силовые контакты 15. Обмотки статора двигателя 1 подключаются вновь к сети с номинальным напряжемоменту М двигателя 1. Сигнал U поступает на нижний вход блока 22 и задает необходимый угол управления оС симисторами и, следовательно, необходимое напряжение U на статоре двигателя 1. В процессе торможения заданный тормозной момент М, сохраняется неизменным.
50
нием и с аналогичным реверсу чередо55 ванием фаз (противоположным направлеПосле окончания торможения двига- нием вращения электромагнитного поля
статора по отношению к двигательному режиму). Двигатель 1 продолжает уветеля I происходит его пуск в противоположном направлении, т.е. реверс
двигателя. При этом также сохраняется заданный тормозной момент, постоянство ускорения ротора, снижение потребления электроэнергии и уменьше- ние потерь. Причем, реверс двигателя производится в основном за счет активного момента статического сопротивления. Катушка 18 реле направления активной мощности остается при
в результате реверса, скорость двигателя 1 под действием суммарного момента (М + М ) приближается к зна- чению синхронной скорости (j , сколь-
ет свое направление, так как двига- тель переходит в режим рекуператив- ного торможения. В момент изменения направления активной мощности на ста- оре двигателя 1 катушка 18 реле нап- равления активной мощности включается, размыкает свой размыкающий контакт 19 в цепи питания катушки 5 второго контактора, обесточивая ее, и
жение уменьшается, а затем изменяет знак на отрицательный. При этом потребляемая из сети активная мощность уменьшается до нуля, а затем изменязамыкает замыкаюш 1й контакт 20 в цепи питания катушки 6 третьего контактора - второй контактор отключается, размыкает свой контакт 11, снимаются управляющие импульсы с симисторов 21, посотедние закрываются и отключают
двигатель от сети с пониженным напря- жением. При этом замыкается размыкающий контакт 14 и катушка 6 третьего контактора получает питание по цепи: контакты 20,26,10 и 14 и катушка 6. Третий контактор срабатывает и замыкает свои силовые контакты 15. Обмотки статора двигателя 1 подключаются вновь к сети с номинальным напряже45
50
нием и с аналогичным реверсу чередоличивать скорость, рекуперируя энергию . торможения в питающую сеть. Переходный процесс заканчивается при равенстве момента двигателя моменту статического сопротивления,. По истечении времени рекуперативного торможения размыкается размыкающий контакт 26 путевого выключателя, катушка 6 третьего контактора теряет питание,..третий контактор отключается, размыкает силовые контакты 15, двигатель 1 отключается от сети и переводится в режим снижения скорости, например, путем срабатывания тормозных электромагнитов.
Предлагаемый способ торможения используют и при питании асинхронного двигателя от полупроводникового преобразователя. Его применение по сравнению с известными способами обес,- печивает ряд преимуществ. Существенно снижаются потери в двигателе при торможении за счет понижения напряжения при реверсе и контроля направле- ния активной мощности на статоре двигателя. Повьщ1ается эффективность торможения на начальном этапе торможения
Способ торможения асинхронного электродвигателя, при котором производят изменение чередования фаз ста- торной обмотки, после чего отключают двигатель от источника питания, о т- ли чающийся тем, что, с целью уменьшения времени торможения, определяют момент на валу электродви гателя, сравнивают его с заданным значением ив случае неравенства моментов одновременно с изменением чередования фаз статорной обмотки умень шают напряжение на статоре электродвигателя до величины, при которой результат сравнения момента на валу электродвигателя и заданного момента становится равным нулю, контролируют направление активной мощности на ста торе и при изменении ее знака увеличивают Напряжение на статоре до нова счет снижения потребления электроэнергии из сети и постоянства измене- 30минального значения, после чего от- ния скорости во времени. Повышаетсяключают электродвигатель от источни- надежность, так как ограничиваютсяка питания.
bfc
броски электромагнитного момента двигателя при переключении электромагнитного поля статора на противоположное направление вращения, что повыша- .ет срок службы двигателя, механизма и передаточного устройства.
Фор мул. а изо«бретения
Способ торможения асинхронного электродвигателя, при котором производят изменение чередования фаз ста- торной обмотки, после чего отключают двигатель от источника питания, о т- ли чающийся тем, что, с целью уменьшения времени торможения, определяют момент на валу электродвигателя, сравнивают его с заданным значением ив случае неравенства моментов одновременно с изменением чередования фаз статорной обмотки уменьшают напряжение на статоре электродвигателя до величины, при которой результат сравнения момента на валу электродвигателя и заданного момента становится равным нулю, контролируют направление активной мощности на статоре и при изменении ее знака увеличивают Напряжение на статоре до номинального значения, после чего от- ключают электродвигатель от источни- ка питания.
23
П К
5 J1 /П71
.
20 26 JO W ГТ
-)tr-c-4r f
ВНШШИ Заказ 2144/56 Тираж 631 Подписное Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ЭЛЕКТРОДВИ ГАТЕЛЯМИIfiATO;АТ?НГИО-1ЕХШ'4ЕОНД"'ьИБЛИС/!!'>&-:-гг'.гНА | 1971 |
|
SU299925A1 |
| Асинхронный электропривод | 1989 |
|
SU1663727A1 |
| Способ торможения с самовозбуждением асинхронного электродвигателя | 1983 |
|
SU1136285A2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Способ торможения с самовозбуждением трехфазного асинхронного электродвигателя | 1987 |
|
SU1436253A1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| Устройство для управления трехфазным асинхронным электродвигателем | 1987 |
|
SU1539944A1 |
| Электропривод переменного тока | 1985 |
|
SU1354374A1 |
| Электропривод переменного тока | 1988 |
|
SU1621137A1 |
| Электропривод | 1986 |
|
SU1365332A1 |
Изобретение относится к электротехнике и может быть использовано в асинхронных электроприводах с активным моментом статического сопротивления на валу двигателя. Цель изобретения - уменьшение времени торможения. Способ обеспечивает снижение потери в двигателе при торможении за счет понижения напряжения при реверсе и контроля направления активной мощности на статоре двигателя. Эффективность торможения повьп71ается на начальном этапе -торможения за счет снижения потребления электроэнергии из сети и постоянства изменения скорости во времени. Повьшение надежности обеспечивается в результате ограничения бросков электромагнитного поля статора на противоположное направление вращения,что повьшает срок службы двигателя, механизма и передаточного устройства. 1 ил. i СЛ
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМДВИГАТЕЛЕМ | 0 |
|
SU299926A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Андреев В.П., Сабинин Ю.А | |||
| Основы электропривода | |||
| М.-Л.: Госэнергоиз- дат, 1963, с | |||
| Способ получения продукта конденсации бетанафтола с формальдегидом | 1923 |
|
SU131A1 |
