Изобретение относится к области контроля и испытания тормозных систем, а более конкретно - к способам диагностирования тормозных устройств подъемных механизмов с электроприводом.
Известен способ диагностирования тормозных систем транспортных средств по патенту РФ на изобретение №2180630, МПК В60Т 17/22, G01M 17/00, опубл. 20.03.2002, который основан на сравнении контролируемых тормозных параметров с номинальными значениями. Этот способ заключается в торможении раскрученных до заданной скорости вывешенных колес, на которые исключено внешнее воздействие, непрерывном измерении в процессе торможения чисел импульсов опорного генератора эталонной частоты между смежными импульсами датчика угловой скорости колеса, нахождении по ним времени торможения до полной остановки каждого колеса и промежутков времени, соответствующих повороту колеса на смежные и равные угловые интервалы заданной величины, вычислении текущих значений угловой, линейной скоростей и замедления каждого вывешенного колеса, получении зависимости замедления каждого колеса по времени, определении по ней времени запаздывания тормозной системы, времени нарастания замедления, общего времени торможения, замедления незаторможенного колеса, установившегося замедления, максимального замедления, тормозного пути за время установившегося торможения, тормозного пути колеса, дополнительном определении моментов инерции колес. Заключение о техническом состоянии тормозов делают на основе сравнения полученных в процессе диагностирования значений указанных параметров тормозного процесса при измеренных значениях моментов инерции колес с их нормативными значениями, полученными для каждого из указанных параметров в зависимости от момента инерции колес при исправной тормозной системе. Тормозная система считается исправной при равенстве измеренных значений с нормальными значениями исправной тормозной системы. Учет влияния на параметры процесса торможения вывешенных колес износа шин повышает точность определения технического состояния тормозных систем. Однако, контроль тормозного устройства сопровожден измерениями множества контролируемых параметров тормозного устройства. К тому же эти параметры характерны для транспортных систем и не подходят для контролирования тормозного устройства в механизме подъема.
Известен способ контроля тормозного устройства механизма подъема с электроприводом, защищенный патентом РФ на изобретение №2455223, МПК B66D 5/00, опубл. 10.07.2012. Этот способ наиболее близок к заявляемому способу и принят за прототип. Согласно прототипу исправность тормозного устройства определяют в процессе работы механизма подъема по разности потребляемой активной мощности электродвигателя, которая идет непосредственно на торможение тормозного устройства. Сначала измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема с разомкнутым исправным тормозным устройством. Затем кратковременно замыкают исправное тормозное устройство и измеряют величину потребляемой активной мощности электродвигателя при замкнутом тормозном устройстве. После этого тормозное устройство размыкают и вновь измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема и сравнивают ее со значением потребляемой активной мощности, полученной до замыкания исправного тормозного устройства. В случае неравенства, которое может быть вызвано изменением массы поднимаемого или опускаемого груза во время контроля тормозного устройства, указанные измерения повторяют до получения равных значений. При достижении равенства, определяют разность значений потребляемых активных мощностей электродвигателя при замкнутом и разомкнутом состояниях исправного тормозного устройства. Это значение разности потребляемых активных мощностей электродвигателя для исправного тормозного устройства принимают за эталонное значение, которое вводят в цифровой вычислительный блок (ЦВБ) и используют для контроля тормозного устройства в режиме работы механизма подъема. Для получения заключения об исправности контролируемого тормозного устройства оператор нажимает кнопку «контроль тормоза». Аналогично, как для исправного тормозного устройства, производят измерение потребляемой активной мощности Р1 в режиме работы механизма подъема с разомкнутым тормозным устройством. Далее кратковременно замыкают тормозное устройство и производят измерение значения потребляемой активной мощности Р2. После этого, тормозное устройство размыкают и вновь измеряют значения потребляемой активной мощности Р3. В случае неравенства P1 и Р3 производят повторное измерение и при их равенстве определяют разность ΔР=Р2-Р1. Полученная разность ΔР - это мощность, которая идет на торможение. Если она равна эталонному значению, то тормозное устройство исправно. При неравенстве ЦВБ подает сигнал на блок индикации о неисправности тормозного устройства. Однако, измерения потребляемой активной мощности электродвигателя на участках переходных процессов, возникающих при включении тормозного устройства и выключении тормозного устройства, дают недостоверные результаты. Это наглядно видно из диаграмм, приведенных на фиг. 2 прототипа. Измерение потребляемой активной мощности электродвигателя достоверно только на участках установившегося режима работы электродвигателя, то есть при статической нагрузке.
Техническая проблема, на решение которой направлено изобретение, заключается в получении достоверной информации о потребляемой активной мощности электродвигателя при контроле исправного состояния тормозного устройства в механизме подъема с электроприводом.
Решение указанной проблемы повышает точность диагностики состояния тормозного устройства в механизме подъема.
Техническая проблема решается следующим образом.
Способ контроля тормозного устройства механизма подъема с электроприводом имеет общее с прототипом то, что сначала измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема с разомкнутым исправным тормозным устройством. Затем кратковременно замыкают исправное тормозное устройство и измеряют величину потребляемой активной мощности электродвигателя при замкнутом тормозном устройстве. После этого тормозное устройство размыкают и вновь измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема, которую сравнивают со значением потребляемой активной мощности, полученным до замыкания исправного тормозного устройства. Как и в прототипе, в случае неравенства значений, которое может быть вызвано изменением массы поднимаемого или опускаемого груза во время контроля тормозного устройства, измерение повторяют до получения равных значений. При достижении равенства определяют разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях исправного тормозного устройства, которую принимают за эталонное значение и это эталонное значение вводят в цифровой вычислительный блок.
Для получения заключения об исправности контролируемого тормозного устройства аналогично, как для исправного тормозного устройства, определяют разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства и сравнивают ее с установленным эталонным значением. Тормозное устройство считают исправным при равенстве сравниваемых значений.
В отличие от прототипа, согласно изобретению, предварительно выявляют интервалы времени, соответствующие установившимся режимам работы механизма подъема и тормозного устройства. Задают временные пределы измерения потребляемой активной мощности в рамках указанных интервалов, которые вводят в цифровой вычислительный блок. С помощью реле задержки времени обеспечивают управляемое измерение потребляемой активной мощности непосредственно в заданных временных пределах. Для определения разностей эталонного и контролируемого значений потребляемых активных мощностей используют их усредненные значения.
Технический результат достигнут за счет того, что измерения потребляемой активной мощности электродвигателя происходит при срабатывании реле задержки времени, в результате чего исключаются измерения мощностей на участках переходных процессов. При отключении реле задержки времени на ЦВБ поступает команда для начала измерения мощности датчиком активной мощности. На выбранном интервале времени измеряется усредненное значение активной мощности, что исключает влияние на результат измерения пульсаций мощности, вызванных неравномерностью работы механизма подъема, что также повышает точность диагностики тормозного устройства.
Из уровня техники не выявлены способы, в которых контроль исправности тормозного устройства осуществлялся бы в автоматическом режиме по потребляемой активной мощности электродвигателя механизма подъема только в установившихся режимах работы электродвигателя.
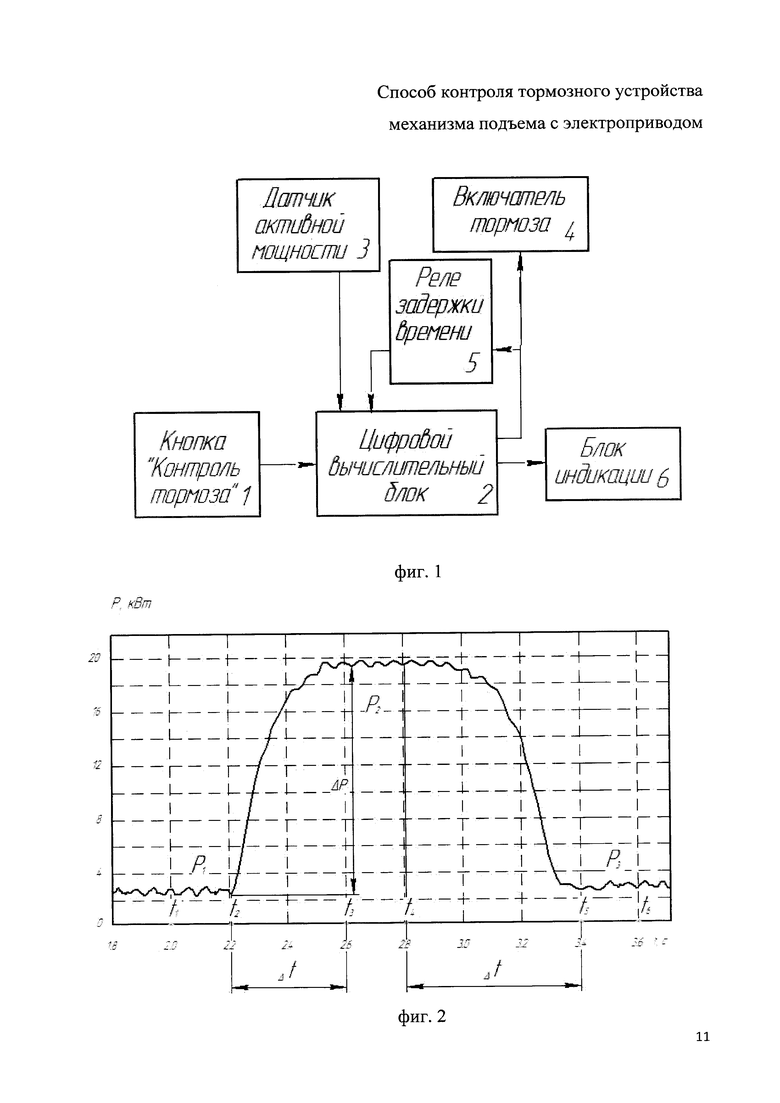
На фиг. 1 представлена функциональная блок схема устройства для реализации способа.
На фиг. 2 представлены временные диаграммы сигнала активной мощности с датчика активной мощности при работе механизма подъема и цикла замыкания тормозного устройства, где P1 - активная мощность электродвигателя до замыкания тормозного устройства, Р2 - активная мощность электродвигателя при замыкании тормозного устройства. Р3 - активная мощность электродвигателя после размыкания тормозного устройства. ΔР - разность (Р2-P1).
Способ осуществляют следующим образом.
Для исправного тормозного устройства, производят измерение потребляемой активной мощности P1 (фиг. 2) в режиме работы механизма подъема с разомкнутым тормозным устройством. Далее кратковременно замыкают тормозное устройство и производят измерение значения потребляемой активной мощности Р2. После этого, тормозное устройство размыкают и вновь измеряют значения потребляемой активной мощности Р3. В случае неравенства P1 и Р3 производят повторное измерение и при их равенстве определяют разность ΔР=Р2-Р1. Полученная разность ΔР - это мощность, которая идет на торможение, она принимается в качестве эталонного значения ΔРН. Все измерения проводятся в установившихся режимах и заданных интервалах времени. Для обеспечения наиболее достоверной информации используют усредненные значения Р1, Р2, Р3.
При определении исправности диагностируемого тормозного устройства действия оператора сводятся к включению механизма подъема, нажатию в установившемся режиме работы механизма подъема кнопки «контроль тормоза», анализу результатов контроля тормозной системы по информации, представленной на блоке индикации.
При нажатии кнопки «контроль тормоза» 1 (фиг. 1), в ЦВБ 2 запускается процесс измерения потребляемой активной мощности P1 (момент t1) с помощью датчика активной мощности 3. По окончании временного предела измерения (момент t2) подается команда на включение тормозного механизма 4 и срабатывание реле задержки времени 5. Через время задержки Δt=t3-t2 гарантированно заканчивается переходный процесс изменения активной мощности при включении тормозного механизма (момент t3) и отключившееся реле задержки времени даст команду ЦВБ на измерение мощности Р2. По окончании временного предела измерения мощности Р2 (момент t4) ЦВБ подает команду на выключение тормозного механизма и повторное срабатывание реле задержки времени. Через время задержки Δt=t5-t4 заканчивается переходный процесс изменения активной мощности при отключении тормозного механизма (момент t5) и отключившееся реле задержки времени даст команду ЦВБ на измерение мощности Р3. По окончании временного предела измерения (момент t6) цикл измерения активной мощности заканчивается. ЦВБ проверяет условие P1=Р3 (в случае неравенства в блоке индикации 6 отображается информация, что нужно произвести измерение повторно), если условие удовлетворяется, то вычисляется разница ΔР=Р2-P1 - это мощность, которая идет на торможение. Если она равна ранее запомненной эталонной величине ΔPH, то тормозное устройство исправно. При неравенстве ЦВБ подает сигнал на блок индикации о неисправности тормозного устройства. При появлении предупреждающего сигнала оператор должен принять необходимые меры в рамках его должностных инструкций.
Временные пределы измерения, (участки времени t1-t2; t3-t4; t5-t6.) обеспечивают усреднения результатов измерений, и исключает влияние на результат измерений пульсаций мощности, вызванных неравномерностью работы механизма подъема. Длительность измерения устанавливается в пределах одного оборота барабана лебедки механизма подъема.
В качестве реле задержки времени может, например, быть использовано микропроцессорное реле задержки времени двухканальное типа УТ24
Цикл измерения проходит достаточно быстро, и существенного изменения массы поднимаемого или опускаемого груза за время контроля тормозного устройства за счет изменения массы каната не происходит. Проверка условия P1=Р3 удовлетворяется практически при первом же измерении. Кратковременность работы электродвигателя при замкнутом тормозном устройстве механизма подъема исключает его перегрузку.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ТОРМОЗНОГО УСТРОЙСТВА МЕХАНИЗМА ПОДЪЕМА С ЭЛЕКТРОПРИВОДОМ | 2011 |
|
RU2455223C1 |
| Способ автоматизированного контроля исправности измерительных трактов многофункциональных счетчиков электрической энергии в трехфазных сетях с изолированной нейтралью | 2024 |
|
RU2837606C1 |
| Способ торможения асинхронного электродвигателя | 1984 |
|
SU1226598A1 |
| СПОСОБ ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ КРАНА МОСТОВОГО ТИПА | 2007 |
|
RU2354604C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ РАЗГРУЗКИ ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ГЕНЕРАТОРНЫХ АГРЕГАТОВ | 2019 |
|
RU2731760C1 |
| ИНДИКАТОР НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА | 1967 |
|
SU216131A1 |
| СПОСОБ ИСПЫТАНИЯ НА ГЕРМЕТИЧНОСТЬ ИДЕНТИЧНЫХ ИЗДЕЛИЙ | 2003 |
|
RU2258915C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОМЕХАНИЧЕСКОГО АГРЕГАТА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2626231C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОЦЕНКИ И РЕГУЛИРОВАНИЯ ПОТРЕБНОЙ МОЩНОСТИ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ГОРОДСКОГО ЭЛЕКТРОТРАНСПОРТА | 2005 |
|
RU2292273C1 |
Способ контроля тормозного устройства механизма подъема с электроприводом может быть использован при диагностировании тормозных устройств подъемных механизмов с электроприводом. Предварительно выявляют интервалы времени, соответствующие установившимся режимам работы механизма подъема и тормозного устройства, и задают временные пределы измерения потребляемой активной мощности в рамках указанных интервалов. Измерение мощности, непосредственно на заданных интервалах времени, осуществляют с помощью реле задержки времени. Определяют разность усредненных значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях исправного тормозного устройства. Эту разность принимают за эталонное значение и вводят в цифровой вычислительный блок. Аналогично, как для исправного тормозного устройства, определяют разность усредненных значений потребляемых активных мощностей электродвигателя механизма подъема для контролируемого тормозного устройства. Контролируемое тормозное устройство считают исправным при равенстве эталонного и сравниваемых значений. Способ обеспечивает точную диагностику исправного состояния тормозного устройства в механизме подъема за счет исключения измерения активной мощности в переходных периодах и получения тем самым достоверной информации о потребляемой активной мощности электродвигателя при работе механизма подъема. 2 ил.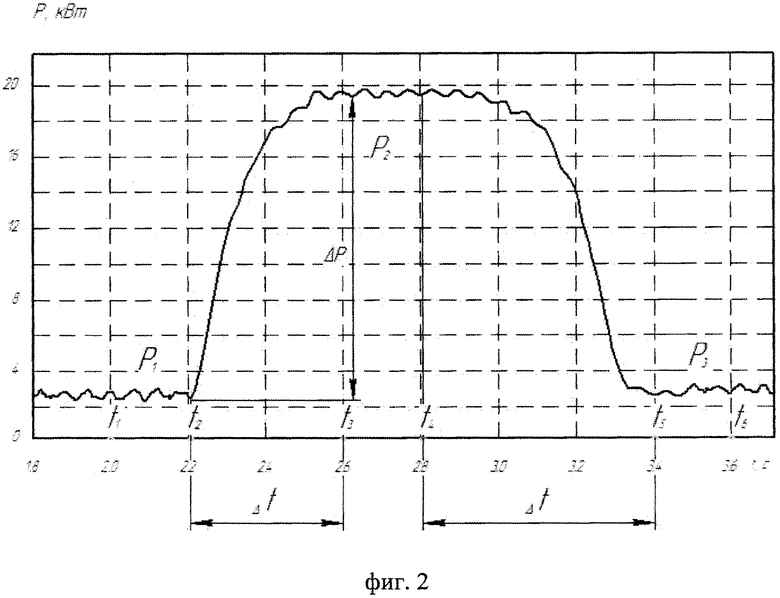
Способ контроля тормозного устройства механизма подъема с электроприводом, согласно которому измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема с разомкнутым исправным тормозным устройством, затем кратковременно замыкают исправное тормозное устройство и измеряют величину потребляемой активной мощности электродвигателя при замкнутом тормозном устройстве, после чего тормозное устройство размыкают и вновь измеряют величину потребляемой активной мощности электродвигателя в режиме работы механизма подъема и сравнивают ее со значением потребляемой активной мощности, полученным до замыкания исправного тормозного устройства, при этом в случае неравенства значений, которое может быть вызвано изменением массы поднимаемого или опускаемого груза во время контроля тормозного устройства, измерения повторяют до получения равных значений, а при их равенстве определяют разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях исправного тормозного устройства, которую принимают за эталонное значение и через блок ввода информации это эталонное значение вводят в цифровой вычислительный блок, а для получения заключения об исправности контролируемого тормозного устройства аналогично, как для исправного тормозного устройства, определяют разность значений потребляемых активных мощностей электродвигателя механизма подъема при замкнутом и разомкнутом состояниях контролируемого тормозного устройства и сравнивают ее с установленным эталонным значением, при этом тормозное устройство считают исправным при равенстве сравниваемых значений, отличающийся тем, что предварительно выявляют интервалы времени, соответствующие установившимся режимам работы механизма подъема и тормозного устройства, задают временные пределы измерения потребляемой активной мощности в рамках указанных интервалов и с помощью реле задержки времени обеспечивают управляемое измерение потребляемой активной мощности непосредственно на заданных интервалах времени, причем для определения разностей эталонного и контролируемого значений потребляемых активных мощностей используют их усредненные значения.
| СПОСОБ КОНТРОЛЯ ТОРМОЗНОГО УСТРОЙСТВА МЕХАНИЗМА ПОДЪЕМА С ЭЛЕКТРОПРИВОДОМ | 2011 |
|
RU2455223C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗОМ ЛИФТА, ТОРМОЗ ЛИФТА И ТОРМОЗНАЯ СИСТЕМА ЛИФТА | 2008 |
|
RU2459760C1 |
| WO 2016019779 A1, 11.02.2016. | |||

